Изобретение относится к технике связи, конкретнее к наземным системам приема радиосигналов от источников радиоизлучений (ИРИ), находящихся на объектах, в том числе подвижных, и может быть использовано для определения пространственных координат и других характеристик объекта, функционально связанных с его координатами, в информационно-управляющих радиотехнических системах различного назначения, в том числе в системах навигации и посадки летательных аппаратов.
Изобретение позволит одновременно обслуживать несколько ИРИ, контролировать наземными средствами перемещение в пространстве ИРИ, эффективно использовать ресурс связи, упростить соответствующие системы, увеличить их технико-экономическую эффективность с учетом всех компонентов, влияющих на стоимость и технические показатели. Для решения этих задач в первую очередь необходимо однозначное и точное определение пространственных координат объекта.
Известны системы приема радиосигналов, используемые в том числе в системах определения координат ИРИ и основанные на применении угломерных, дальномерных, разностно- и суммарно-дальномерных и комбинированных методов определения местоположения объекта-носителя ИРИ с амплитудными, временными, частотными, фазовыми и импульсно-фазовыми методами измерения параметров радиосигналов [патенты РФ №№2018855, 2115137, 2258242, 2309420, 2363117; Основы испытаний летательных аппаратов / Е.И.Кринецкий и др. Под ред. Е.И.Кринецкого. - М.: Машиностр., 1979, с.64-89; Радиотехнические системы / Ю.М.Казаринов и др. Под ред. Ю.М.Казаринова. - М.: ИЦ «Академия», 2008, гл.10.; Быстров Р.П. и др. Пассивная радиолокация: методы обнаружения объектов. Под ред. Р.П.Быстрова и А.В.Соколова. - М.: Радиотехника, 2008, гл.6; Мельников Ю.П., Попов С.В. Радиотехническая разведка. Методы оценки эффективности местоопределения источников излучения. - М.: «Радиотехника», 2008, гл.5]. Известные системы имеют те или иные недостатки, например необходимость механического перемещения антенной системы, недостаточную разрешающую способность по дальности, невозможность однозначного определения координат ИРИ, ненадежность и др.
По критерию минимальной достаточности за прототип принята система приема радиосигналов от источников радиоизлучений, находящихся на объектах, в том числе подвижных, включающая наземную пунктовую приемную подсистему, содержащую приемники радиосигналов от источников радиосигналов, расположенные в пунктах приемной подсистемы и связанные коммуникационными линиями с подсистемой обработки информации, включающей последовательно функционально соединенные устройства идентификации радиосигналов соответствующим источникам радиосигналов, регистраторы моментов приема радиосигналов, например, по временным положениям их передних фронтов, измерители разности времен между временами приемов радиосигналов на разных пунктах наземной приемной подсистемы, функционально связанные со средствами синхронизации, при этом фазовые центры приемных антенн каждого из приемных пунктов наземной приемной подсистемы расположены в заданных точках в прямоугольной системе координат с началом координат в заданной точке 0, находящейся преимущественно на поверхности земли, с плоскостью (0, X, Y), касательной к поверхности земли в точке 0, и осью 0Z, направленной от земли [патент РФ №2204145, 10.05.2003].
Преимуществом заявляемой системы приема радиосигналов от ИРИ, находящихся на объектах, наземной пунктовой приемной подсистемой по сравнению с известными и прототипом является возможность повышения технико-экономической эффективности радиотехнических систем определения пространственных координат и других характеристик объектов. Это достигается тем, что на шести пунктах приема регистрируют моменты времени приема радиосигналов, передаваемых ИРИ. При этом фазовые центры антенн располагают определенным образом. Пространственные координаты определяют с использованием простых выражений, зависящих от измеренных разностей между временами приемов радиосигналов на пунктах. Более высокая точность достигается в том числе за счет возможности выбора из трех предлагаемых вариантов определения координат ИРИ в каждой точке пространства, наилучшего по точности. Это позволяет получить в том числе близкую к круговой зону действия реализующих его систем и существенно увеличивает объем этой зоны. Также система исключает неоднозначность определения координат и позволяет контролировать наземными средствами перемещение в пространстве источников радиоизлучений.
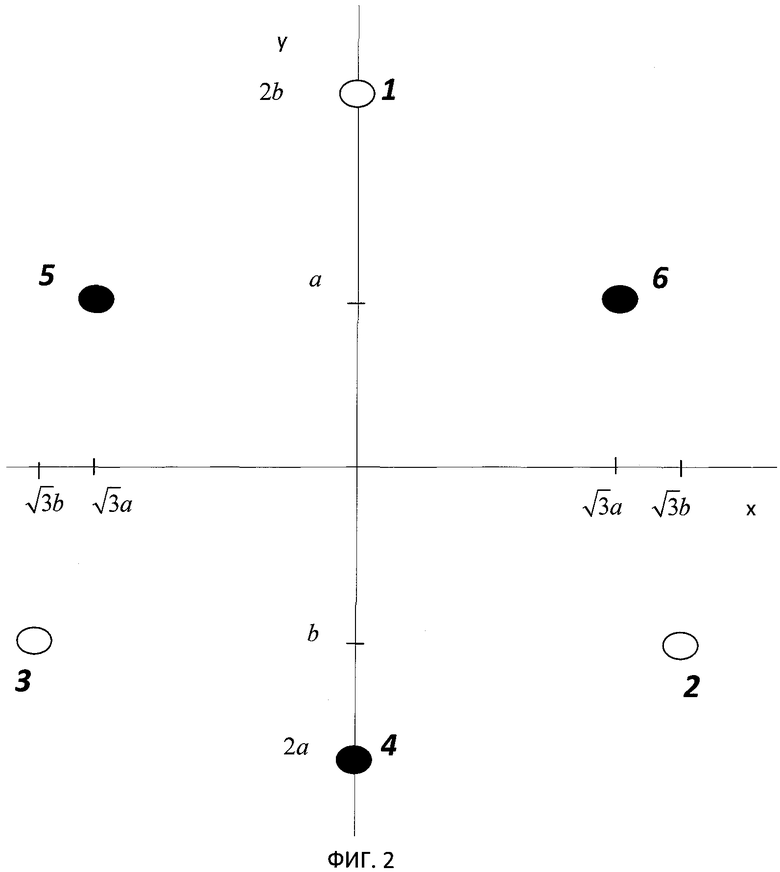
Для достижения указанного технического результата в системе приема радиосигналов от источников радиоизлучений, находящихся на объектах, в том числе подвижных, включающей наземную пунктовую приемную подсистему, содержащую приемники радиосигналов от источников радиосигналов, расположенные в пунктах приемной подсистемы и связанные коммуникационными линиями с подсистемой обработки информации, включающей последовательно функционально соединенные устройства идентификации радиосигналов соответствующим источникам радиосигналов, регистраторы моментов приема радиосигналов, например, по временным положениям их передних фронтов, измерители разности времен между временами приемов радиосигналов на разных пунктах наземной приемной подсистемы, функционально связанные со средствами синхронизации, при этом фазовые центры приемных антенн каждого из приемных пунктов наземной приемной подсистемы расположены в заданных точках в прямоугольной системе координат с началом координат в заданной точке 0, находящейся преимущественно на поверхности земли, с плоскостью (0, X, Y), касательной к поверхности земли в точке 0, и осью 0Z, направленной от земли, в соответствии с настоящим изобретением наземная пунктовая приемная подсистема включает шесть пунктов приема, упорядоченных заданным образом и разделенных на две группы, причем первая группа из трех пунктов приема содержит преимущественно ненаправленные приемные антенны, фазовые центры которых расположены на одинаковой заданной высоте Z=h1 в вершинах равностороннего треугольника с координатами на плоскости (0, X, Y), равными X1=0, Y1=2b;  , Y2=-b;
, Y2=-b;  , Y3=-b, и вторая группа из трех пунктов приема также содержит преимущественно ненаправленные приемные антенны, фазовые центры которых расположены на одинаковой заданной высоте Z=h2 в вершинах равностороннего треугольника с координатами на плоскости (0, X, Y), равными Х4=0, Y4=-2a;
, Y3=-b, и вторая группа из трех пунктов приема также содержит преимущественно ненаправленные приемные антенны, фазовые центры которых расположены на одинаковой заданной высоте Z=h2 в вершинах равностороннего треугольника с координатами на плоскости (0, X, Y), равными Х4=0, Y4=-2a;  , Y5=a;
, Y5=a;  , Y6=a, где a и b - заданные положительные числа, кроме того, указанная подсистема включает средства выделения принятых и неотраженных от поверхности земли радиосигналов, в том числе при необходимости средства экранирования отраженных от земли радиосигналов, средства измерений преимущественно трех групп разностей Δti,j, между временами приемов радиосигналов на i-х пунктах и временами приемов радиосигналов на j-х пунктах приемной системы, причем эти средства измерений выполнены с возможностью измерения Δti,j в первой группе для i-х пунктов с индексами 2, 3, 4, 5, 6 относительно первого пункта с индексом j=1, измерения Δti,j во второй группе для i-х пунктов с индексами 1, 3, 4, 5, 6 относительно второго пункта с индексом j=2, измерения Δti,j в третьей группе для i-х пунктов с индексами 1, 2, 4, 5, 6 относительно третьего пункта с индексом j=3, также подсистема обработки информации содержит в том числе вычислители, выполненные с возможностью по совокупности указанных разностей времен Δti,j через параметры
, Y6=a, где a и b - заданные положительные числа, кроме того, указанная подсистема включает средства выделения принятых и неотраженных от поверхности земли радиосигналов, в том числе при необходимости средства экранирования отраженных от земли радиосигналов, средства измерений преимущественно трех групп разностей Δti,j, между временами приемов радиосигналов на i-х пунктах и временами приемов радиосигналов на j-х пунктах приемной системы, причем эти средства измерений выполнены с возможностью измерения Δti,j в первой группе для i-х пунктов с индексами 2, 3, 4, 5, 6 относительно первого пункта с индексом j=1, измерения Δti,j во второй группе для i-х пунктов с индексами 1, 3, 4, 5, 6 относительно второго пункта с индексом j=2, измерения Δti,j в третьей группе для i-х пунктов с индексами 1, 2, 4, 5, 6 относительно третьего пункта с индексом j=3, также подсистема обработки информации содержит в том числе вычислители, выполненные с возможностью по совокупности указанных разностей времен Δti,j через параметры
l1=d6,1, w1=d5,1, u1=d3,1, p1=d2,1, s1=d4,1;
l2=d5,2, w2=d4,2, u2=d1,2, p2=d3,2, s2=d6,2;
l3=d4,3, w3=d6,3, u3=d2,3, p3=d1,3, s3=d5,3;
где di,j=cΔti,j, с - скорость распространения радиосигнала, для каждой упомянутой j-й группы определять параметры
 ;
; ,
,
по совокупностям параметров lj, wj, uj, pj и Мj, Nj определять параметры
Aj=(2ljMj-Nj)2/b2, Вj=(2wjMj-Nj)2/b2,
Cj=(2ujMj-Nj)2/a 2, Dj=(2pjMj-Nj)2/a 2,
и по Mj и совокупности параметров Aj, Bj, Cj, Dj для каждой упомянутой j-й группы преимущественно определять параметр  , по Kj идентифицировать группу и соответствующий ей индекс j=jm, для которой параметр Kj минимальный, для найденного таким образом значения индекса j=jm через параметры Mj и Nj определять дальность от приемного пункта с индексом j=jm до объекта
, по Kj идентифицировать группу и соответствующий ей индекс j=jm, для которой параметр Kj минимальный, для найденного таким образом значения индекса j=jm через параметры Mj и Nj определять дальность от приемного пункта с индексом j=jm до объекта  , и по
, и по  и совокупностям параметров
и совокупностям параметров  ,
,  , sj определять параметры
, sj определять параметры


и через них определять преимущественно пространственные координаты объекта (X0, Y0, Z0)



где α1=1, β1=0; α2=-1/2,  ; α3=-1/2,
; α3=-1/2,  .
.
В существующем уровне техники не выявлено источников информации, которые содержали бы сведения о системах того же назначения с указанной совокупностью отличительных признаков, что позволяет считать заявляемую систему новой и имеющей изобретательский уровень. Предлагаемая система благодаря отличительным признакам обеспечивает повышение технико-экономической эффективности систем данного назначения.
Ниже изобретение описано более детально со ссылками на фигуры. На фиг.1 показана заявляемая система, на фиг.2 - расположение пунктов в наземной приемной подсистеме, на фиг.3-6 - примеры расчета зон действия системы с заданными погрешностями определения координат объекта. Как и в прототипе, система приема 1 (фиг.1) включает расположенный на объекте 2 (пояснения даются на примере одного объекта) источник радиосигналов 8 и наземную пунктовую приемную подсистему 9, содержащую приемники 3 радиосигналов от источника радиосигналов 8, расположенные в пунктах приемной подсистемы 9 и связанные коммуникационными линиями с подсистемой обработки информации 7, включающей последовательно функционально соединенные устройства 4 идентификации радиосигналов соответствующим источникам радиосигналов, регистраторы 5 моментов приема радиосигналов, например, по временным положениям их передних фронтов, измерители 6 разности времен между временами приемов радиосигналов на разных пунктах наземной приемной подсистемы, функционально связанные со средствами синхронизации 17. Фазовые центры приемных антенн каждого из приемных пунктов наземной приемной подсистемы 9 расположены, как показано на фиг.2, в заданных точках в прямоугольной системе координат с началом координат в заданной точке 0, находящейся преимущественно на поверхности земли, с плоскостью (0, X, Y), касательной к поверхности земли в точке 0, и осью 0Z, направленной от земли. Система содержит упомянутые составляющие прототипа 1…9 и их функциональные связи, но в отличие от него подсистема 9 включает шесть пунктов приема, показанных на фиг.2 и обозначенных цифрами 1…6, упорядоченных заданным образом и разделенных на две группы. При этом первая группа из трех пунктов приема (белые кружки 1, 2, 3) содержит преимущественно ненаправленные приемные антенны, фазовые центры которых расположены на одинаковой заданной высоте Z=h1 в вершинах равностороннего треугольника с координатами на плоскости (0, X, Y), равными X1=0, Y1=2b (пункт 1);  , Y2=-b (пункт 2);
, Y2=-b (пункт 2);  , Y3=-b (пункт 3). Вторая группа из трех пунктов приема (черные кружки 4, 5, 6) также содержит преимущественно ненаправленные приемные антенны, фазовые центры которых расположены на одинаковой заданной высоте Z=h2 в вершинах равностороннего треугольника с координатами на плоскости (0, X, Y), равными Х4=0, Y4=-2a (пункт 4);
, Y3=-b (пункт 3). Вторая группа из трех пунктов приема (черные кружки 4, 5, 6) также содержит преимущественно ненаправленные приемные антенны, фазовые центры которых расположены на одинаковой заданной высоте Z=h2 в вершинах равностороннего треугольника с координатами на плоскости (0, X, Y), равными Х4=0, Y4=-2a (пункт 4);  , Y5=a (пункт 5);
, Y5=a (пункт 5);  , Y6=a (пункт 6). Подсистема 9 содержит средства измерений 10, 11, 12 преимущественно трех групп разностей Δti,j между временами приемов радиосигналов на i-х пунктах и временами приемов радиосигналов на j-х пунктах приемной подсистемы 9, причем эти средства измерений выполнены с возможностью измерения Δti,j в первой группе (10) для i-х пунктов с индексами 2, 3, 4, 5, 6 относительно первого пункта с индексом j=1, измерения Δti,j во второй группе (11) для i-х пунктов с индексами 1, 3, 4, 5, 6 относительно второго пункта с индексом j=2, измерения Δti,j в третьей группе (12) для i-х пунктов с индексами 1, 2, 4, 5, 6 относительно третьего пункта с индексом j=3. Также подсистема обработки информации 7 содержит в том числе идентификатор 13, вычислитель дальности 14, вычислитель вспомогательных параметров 15 и вычислитель пространственных координат объекта. Также подсистема 9 содержит на приеме средство 18 экранирования отраженных от поверхности земли радиосигналов.
, Y6=a (пункт 6). Подсистема 9 содержит средства измерений 10, 11, 12 преимущественно трех групп разностей Δti,j между временами приемов радиосигналов на i-х пунктах и временами приемов радиосигналов на j-х пунктах приемной подсистемы 9, причем эти средства измерений выполнены с возможностью измерения Δti,j в первой группе (10) для i-х пунктов с индексами 2, 3, 4, 5, 6 относительно первого пункта с индексом j=1, измерения Δti,j во второй группе (11) для i-х пунктов с индексами 1, 3, 4, 5, 6 относительно второго пункта с индексом j=2, измерения Δti,j в третьей группе (12) для i-х пунктов с индексами 1, 2, 4, 5, 6 относительно третьего пункта с индексом j=3. Также подсистема обработки информации 7 содержит в том числе идентификатор 13, вычислитель дальности 14, вычислитель вспомогательных параметров 15 и вычислитель пространственных координат объекта. Также подсистема 9 содержит на приеме средство 18 экранирования отраженных от поверхности земли радиосигналов.
Предложенная система 1 работает следующим образом. Источники радиоизлучений 8, находящиеся на объектах 2, посылают радиосигналы. Их принимает наземная приемная подсистема 9, фазовые центры приемных антенн каждого из приемных пунктов которой находятся в указанных заданных. На приемниках 3 принимают радиосигналы от источников радиоизлучения 8, идентифицируют их в устройствах 4 соответствующим источникам, регистрируют моменты приема радиосигналов регистраторами 5, например, по временным положениям их передних фронтов, измеряют разности времен между временами приемов радиосигналов на разных пунктах приемной подсистемы 9 измерителями 6, функционально связанными с со средствами синхронизации 17, и в подсистеме 7 обрабатывают полученную информацию.
Технический результат, заключающийся в повышении технико-экономической эффективности радионавигационных систем определения пространственных координат и других характеристик объекта, достигается за счет того, что наземная пунктовая приемная подсистема 9 включает шесть пунктов приема (фиг.2), упорядоченных заданным образом. При этом, повторим, в первой группе из трех пунктов приема 1, 2, 3 радиосигналы принимают преимущественно ненаправленными приемными антеннами, фазовые центры которых расположены на одинаковой заданной высоте Z=h1 в вершинах равностороннего треугольника с координатами на плоскости (0, X, Y), равными X1=0, Y1=2b;  Y2=-b;
Y2=-b;  Y3=-b. Во второй группе из трех пунктов приема 4, 5, 6 радиосигналы принимают преимущественно ненаправленными приемными антеннами, фазовые центры которых расположены на одинаковой заданной высоте Z=h2 в вершинах равностороннего треугольника с координатами на плоскости (0, X, Y), равными X4=0, Y4=-2a;
Y3=-b. Во второй группе из трех пунктов приема 4, 5, 6 радиосигналы принимают преимущественно ненаправленными приемными антеннами, фазовые центры которых расположены на одинаковой заданной высоте Z=h2 в вершинах равностороннего треугольника с координатами на плоскости (0, X, Y), равными X4=0, Y4=-2a;  , Y5=a;
, Y5=a;  , Y6=a. Средство 18 преимущественно обеспечивает экранирование отраженных от земли радиосигналов. Измерителями 10, 11, 12 производят преимущественно три группы измерений разностей Δti,j между временами приемов радиосигналов на i-х пунктах и временами приемов радиосигналов на j-х пунктах приемной подсистемы 9. При этом в первой группе измерителем 10 производят упомянутые измерения Δti,j. для i-х пунктов с индексами 2, 3, 4, 5, 6 относительно первого пункта с индексом j=1. Во второй группе измерителем 11 производят упомянутые измерения Δti,j, для i-х пунктов с индексами 1, 3, 4, 5, 6 относительно второго пункта с индексом j=2. В третьей группе измерителем 12 производят упомянутые измерения Δti,j, для i-х пунктов с индексами 1, 2, 4, 5, 6 относительно третьего пункта с индексом j=3.
, Y6=a. Средство 18 преимущественно обеспечивает экранирование отраженных от земли радиосигналов. Измерителями 10, 11, 12 производят преимущественно три группы измерений разностей Δti,j между временами приемов радиосигналов на i-х пунктах и временами приемов радиосигналов на j-х пунктах приемной подсистемы 9. При этом в первой группе измерителем 10 производят упомянутые измерения Δti,j. для i-х пунктов с индексами 2, 3, 4, 5, 6 относительно первого пункта с индексом j=1. Во второй группе измерителем 11 производят упомянутые измерения Δti,j, для i-х пунктов с индексами 1, 3, 4, 5, 6 относительно второго пункта с индексом j=2. В третьей группе измерителем 12 производят упомянутые измерения Δti,j, для i-х пунктов с индексами 1, 2, 4, 5, 6 относительно третьего пункта с индексом j=3.
В подсистеме обработки информации 7 вычислители выполнены с возможностью по совокупности измеренных указанных разностей времен Δti,j через параметры
l1=d6,1, w1=d5,1, u1=d3,1, p1=d2,1, s1=d4,1;
l2=d5,2, w2=d4,2, u2=d1,2, p2=d3,2, s2=d6,2;
l3=d4,3, w3=d6,3, u3=d2,3, p3=d1,3, s3=d5,3,
где di,j=cΔti,j, с - скорость распространения радиосигнала, для каждой упомянутой j-й группы определения параметров
 ;
;  ,
,
и по совокупностям параметров lj, wj, uj, pj и Mj, Nj определения параметров
Aj=(2ljMj-Nj)2/b2, Вj=(2wjMj-Nj)2/b2,
Cj=(2ujMj-Nj)2/a 2, Dj=(2pjMj-Nj)2/a 2.
По Mj и совокупности параметров Aj, Bj, Cj, Dj для каждой упомянутой j-й группы преимущественно определяют параметр . По определенным Kj идентификатором 13 определяют группу и соответствующий ей индекс j=jm, для которой параметр Kj минимальный. В этом случае достигается более высокая точность за счет возможности выбора из трех предлагаемых вариантов определения пространственных координат объекта, производимых в каждой точке пространства, наилучшего по точности. Для найденного таким образом значения индекса j=jm и через параметры Mj и Nj в вычислителе 14 определяют дальность от приемного пункта с индексом j=jm до объекта. Далее по  и совокупностям параметров , , sj в вычислителе 15 определяют параметры
и совокупностям параметров , , sj в вычислителе 15 определяют параметры


и через них в вычислителе 16 определяют преимущественно пространственные координаты объекта (X0, Y0, Z0)

где α1=1, β1=0; α2=-1/2,  ; α3=-1/2,
; α3=-1/2,  .
.
Можно уменьшить влияние на точность измерения координат случайных погрешностей измерений Δti,j, например, посредством многократного (N раз) повторения измерений. Т.к. среднеквадратическая ошибка среднего значения в  раз меньше среднеквадратической ошибки отдельного измерения. Систематические ошибки могут быть исключены путем калибровки.
раз меньше среднеквадратической ошибки отдельного измерения. Систематические ошибки могут быть исключены путем калибровки.
Система позволяет варьировать конфигурацию зоны ее действия и формировать ее в зависимости от поставленной задачи. Можно получать зоны, в том числе близкие к круговым, с погрешностью в зоне, не превышающей погрешности измерения координат на границе зоны. Система обладает достаточным быстродействием определения координат и параметров объекта при сохранении заданной точности и может быть реализована с помощью современной элементной базы и микропроцессорной техники.
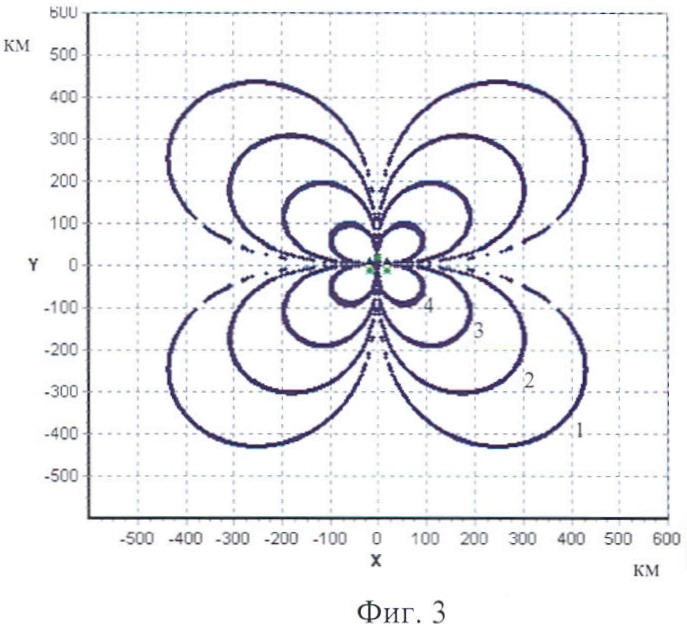
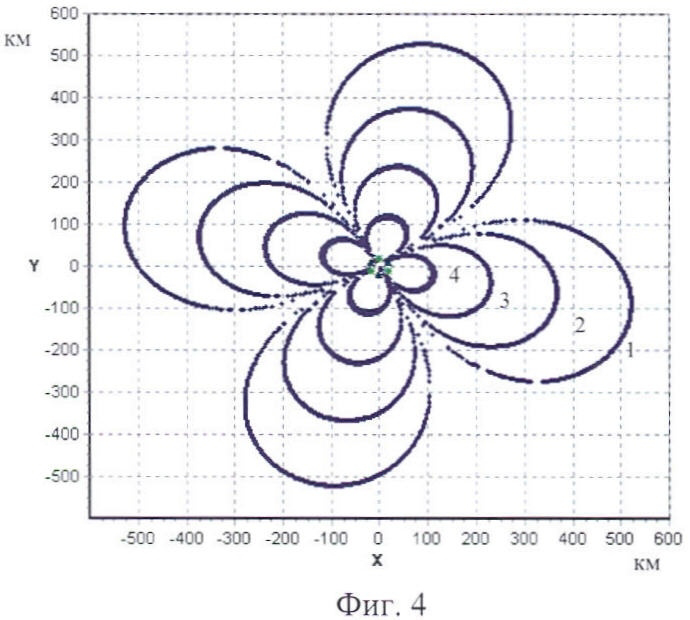
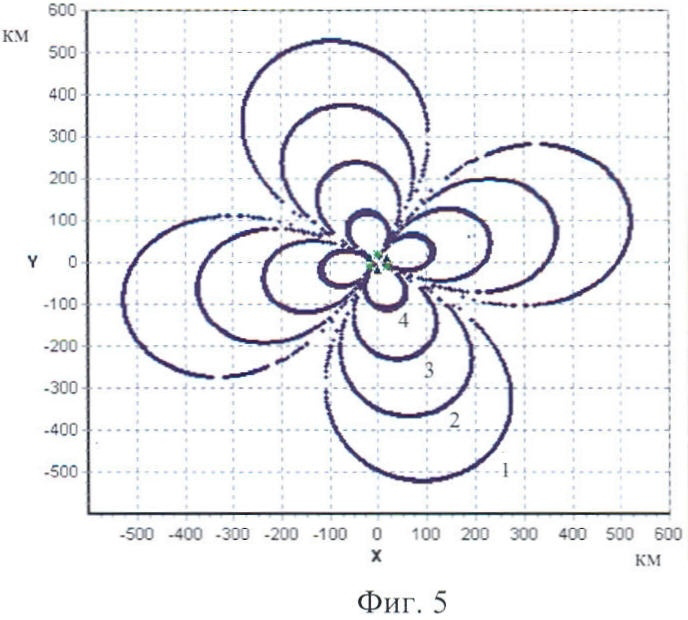
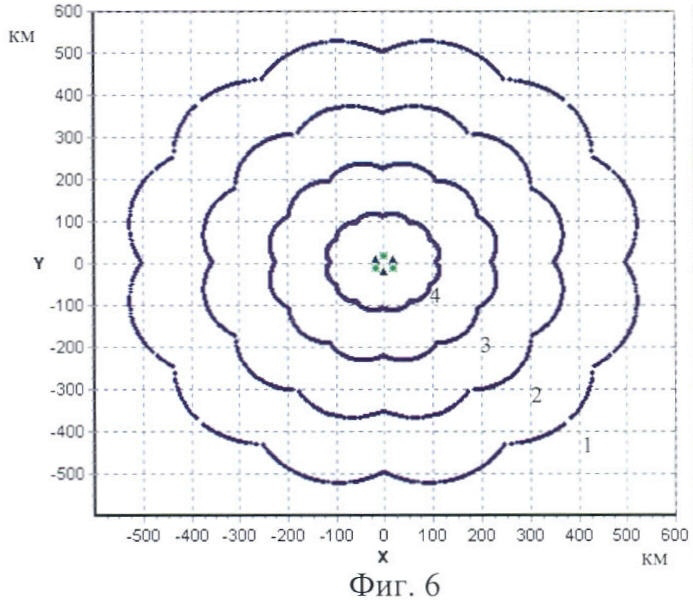
Проиллюстрируем возможности заявляемой системы на примерах математического моделирования измерения пространственных координат. Зададим для всех примеров одинаковые среднеквадратические ошибки σ отдельных измерений di,j, равные 0.6 метра, высоты фазовых центров первых трех антенн (1, 2, 3) h1=1 м, высоты фазовых центров трех других антенн (4, 5, 6) h2=3 м, a=10 км, b=10 км, z=10 км. На фигурах звездочками отмечено расположение первых трех пунктов, а треугольниками - вторых трех пунктов, цифрами 1…4 отмечены границы зон, внутри которых среднеквадратические ошибки измерения значений дальностей от приемного пункта с индексом j до объекта dtj не превышают заданные (1 - 1 км, 2 - 0.5 км, 3 - 0.2 км, 4 - 0.05 км). На фиг.3 представлены результаты моделирования для j=1, на фиг.4 - для j=2, на фиг.5 - для j=3. Результаты моделирования для случая, когда в каждой точке пространства определяют индекс j=jm, для которого Kj минимальное, и определение координат производят для параметров, соответствующих этому jm, представлены на фиг.6. Такой подход позволяет получить близкую к круговой зону действия и существенно увеличить ее объем.
Перечислим основные достоинства системы:
- обеспечивает однозначное определение пространственных координат объекта с заданной точностью,
- определение координат реализуется с помощью современной элементной базы и микропроцессорной техники,
- эффективнее использует ресурс связи,
- одновременно обслуживает несколько объектов,
- позволяет получить в том числе близкую к круговой зону действия системы определения пространственных координат с заданной точностью и существенно увеличивает ее объем.
Результативность и эффективность использования заявляемой системы приема радиосигналов от источников радиоизлучений состоит в том, что она может быть применена на практике для развития и совершенствования радиотехнических систем определения координат объектов, а также в других приложениях. Система позволяет определять их однозначно простыми по сравнению с известными методами.
Таким образом, отличительные признаки заявляемой системы обеспечивают появление новых свойств, не достигаемых в прототипе и аналогах. Проведенный анализ позволил установить: аналоги с совокупностью признаков, тождественных всем признакам заявленного технического решения, отсутствуют, что указывает на соответствие заявленной системы условию «новизны».
Результаты поиска известных решений, в том числе имеющих отношение к радиопеленгации, радионавигации, радиоуправлению и связи, с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленной системы, показали, что они не следуют явным образом из уровня техники. Также не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения действий на достижение указанного результата. Следовательно, заявленное изобретение соответствует условию патентоспособности «изобретательский уровень».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРИЕМА РАДИОСИГНАЛОВ ОТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2010 |
|
RU2453995C1 |
| СИСТЕМА ПРИЕМА РАДИОСИГНАЛОВ НА ОБЪЕКТАХ | 2011 |
|
RU2453996C1 |
| СПОСОБ ПРИЕМА РАДИОСИГНАЛОВ НА ОБЪЕКТАХ | 2010 |
|
RU2453999C1 |
| СИСТЕМА ПРИЕМА РАДИОСИГНАЛОВ ОТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2011 |
|
RU2468380C1 |
| СПОСОБ ПРИЕМА РАДИОСИГНАЛОВ ОТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2011 |
|
RU2465614C1 |
| СИСТЕМА ПРИЕМА РАДИОСИГНАЛОВ НА ОБЪЕКТЕ | 2011 |
|
RU2465728C1 |
| СПОСОБ ПРИЕМА РАДИОСИГНАЛОВ НА ОБЪЕКТАХ | 2011 |
|
RU2468513C1 |
| СПОСОБ ПЕРЕДАЧИ РАДИОСИГНАЛОВ ИСТОЧНИКАМИ РАДИОИЗЛУЧЕНИЙ | 2010 |
|
RU2436242C1 |
| СПОСОБ ПЕРЕДАЧИ РАДИОСИГНАЛОВ ИСТОЧНИКАМИ РАДИОИЗЛУЧЕНИЙ | 2010 |
|
RU2432713C1 |
| СПОСОБ ПЕРЕДАЧИ РАДИОСИГНАЛОВ ИСТОЧНИКАМИ РАДИОИЗЛУЧЕНИЙ | 2010 |
|
RU2432682C1 |
Изобретение относится к технике связи, конкретнее к системам приема радиосигналов (PC) от источников радиоизлучений, находящихся на объектах, наземной шестипунктовой приемной подсистемой (НПП), и может быть использовано преимущественно для однозначного определения пространственных координат и других характеристик объекта, функционально связанных с его координатами, в том числе в радиотехнических комплексах систем навигации. Технический результат - повышение точности приема радиосигналов от источников радиоизлучений. Для этого наземная приемная подсистема содержит расположенные в ее пунктах приемники PC от источников радиоизлучений, связанные коммуникационными линиями с подсистемой обработки информации (ПОИ), включающей последовательно функционально соединенные устройства идентификации, регистраторы моментов времен приема PC, измерители разности времен Δt между временами приемов PC на разных пунктах НПП, функционально связанные со средствами синхронизации, при этом фазовые центры антенн НПП расположены определенным образом, а ПОИ содержат вычислители, выполненные с возможностью определения пространственных координат с выбором из трех вариантов их определения в каждой точке пространства. Система позволяет получить близкую к круговой зону ее действия и существенно увеличивает объем этой зоны. 6 ил.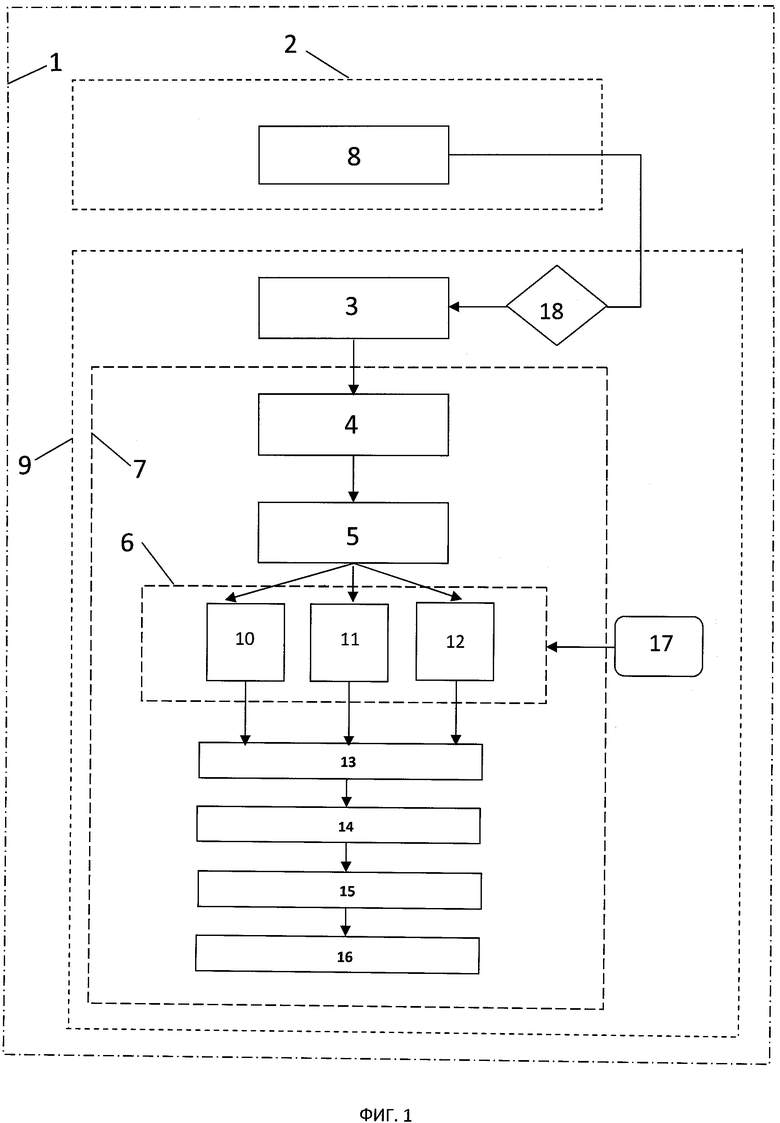
Система приема радиосигналов от источников радиоизлучений, находящихся на объектах, в том числе подвижных, включающая наземную пунктовую приемную подсистему, содержащую приемники радиосигналов от источников радиосигналов, расположенные в пунктах приемной подсистемы и связанные коммуникационными линиями с подсистемой обработки информации, включающей последовательно функционально соединенные устройства идентификации радиосигналов соответствующим источникам радиосигналов, регистраторы моментов приема радиосигналов, например, по временным положениям их передних фронтов, измерители разности времен между временами приемов радиосигналов на разных пунктах наземной приемной подсистемы, функционально связанные со средствами синхронизации, при этом фазовые центры приемных антенн каждого из приемных пунктов наземной приемной подсистемы расположены в заданных точках в прямоугольной системе координат с началом координат в заданной точке 0, находящейся преимущественно на поверхности земли, с плоскостью (0, X, Y), касательной к поверхности земли в точке 0, и осью 0Z, направленной от земли, отличающаяся тем, что наземная пунктовая приемная подсистема включает шесть пунктов приема, упорядоченных заданным образом и разделенных на две группы, причем первая группа из трех пунктов приема содержит преимущественно ненаправленные приемные антенны, фазовые центры которых расположены на одинаковой заданной высоте Z=h1 в вершинах равностороннего треугольника с координатами на плоскости (0, X, Y), равными X1=0, Y1=2b;  Y2=-b;
Y2=-b;  Y3=-b, и вторая группа из трех пунктов приема также содержит преимущественно ненаправленные приемные антенны, фазовые центры которых расположены на одинаковой заданной высоте Z=h2 в вершинах равностороннего треугольника с координатами на плоскости (0, X, Y), равными X4=0, Y4=-2a;
Y3=-b, и вторая группа из трех пунктов приема также содержит преимущественно ненаправленные приемные антенны, фазовые центры которых расположены на одинаковой заданной высоте Z=h2 в вершинах равностороннего треугольника с координатами на плоскости (0, X, Y), равными X4=0, Y4=-2a;  Y5=а;
Y5=а;  Y6=a, где а и b - заданные положительные числа, кроме того, указанная подсистема включает средства выделения принятых и неотраженных от поверхности земли радиосигналов, в том числе при необходимости средства экранирования отраженных от земли радиосигналов, средства измерений преимущественно трех групп разностей Δti,j между временами приемов радиосигналов на i-х пунктах и временами приемов радиосигналов на j-х пунктах приемной подсистемы, причем эти средства измерений выполнены с возможностью измерения Δti,j в первой группе для i-х пунктов с индексами 2, 3, 4, 5, 6 относительно первого пункта с индексом j=1, измерения Δti,j во второй группе для i-х пунктов с индексами 1, 3, 4, 5, 6 относительно второго пункта с индексом j=2, измерения Δti,j в третьей группе для i-х пунктов с индексами 1, 2, 4, 5, 6 относительно третьего пункта с индексом j=3, также подсистема обработки информации содержит, в том числе, вычислители, выполненные с возможностью по совокупности указанных измеренных разностей времен Δti,j и определенных через них параметров di,j=сΔti,j, где с - скорость распространения радиосигнала, через параметры с размерностью длины lj, wj, uj, pj, sj, где j принимает значения 1, 2, 3, определяемые через указанные di,j в соответствии с выражениями
Y6=a, где а и b - заданные положительные числа, кроме того, указанная подсистема включает средства выделения принятых и неотраженных от поверхности земли радиосигналов, в том числе при необходимости средства экранирования отраженных от земли радиосигналов, средства измерений преимущественно трех групп разностей Δti,j между временами приемов радиосигналов на i-х пунктах и временами приемов радиосигналов на j-х пунктах приемной подсистемы, причем эти средства измерений выполнены с возможностью измерения Δti,j в первой группе для i-х пунктов с индексами 2, 3, 4, 5, 6 относительно первого пункта с индексом j=1, измерения Δti,j во второй группе для i-х пунктов с индексами 1, 3, 4, 5, 6 относительно второго пункта с индексом j=2, измерения Δti,j в третьей группе для i-х пунктов с индексами 1, 2, 4, 5, 6 относительно третьего пункта с индексом j=3, также подсистема обработки информации содержит, в том числе, вычислители, выполненные с возможностью по совокупности указанных измеренных разностей времен Δti,j и определенных через них параметров di,j=сΔti,j, где с - скорость распространения радиосигнала, через параметры с размерностью длины lj, wj, uj, pj, sj, где j принимает значения 1, 2, 3, определяемые через указанные di,j в соответствии с выражениями
l1=d6,1, w1=d5,1, u1=d3,1, p1=d2,1, s1=d4,1;
l2=d5,2, w2=d4,2, u=d1,2, p2=d3,2, s2=d6,2;
l3=d4,3, w3=d6,3, u3=d2,3, p3=d1,3, s3=d5,3,
для каждой упомянутой j-й группы определять безразмерные параметры Мj и параметры с размерностью длины Nj в соответствии с выражениями
по совокупностям параметров lj,wj, uj, pj и Мj, Nj определять безразмерные параметры Аj, Вj, Сj и Dj в соответствии с выражениями
Aj=(2ljMj-Nj)2/b2, Bj=(2wjMj-Nj)2/b2,
Cj=(2ujMj-Nj)2/a2, Dj=(2pjMj-Nj)2/a2,
и по Мj и совокупности параметров Аj, Вj, Сj, Dj для каждой упомянутой j-й группы преимущественно определять безразмерный параметр  по Kj идентифицировать группу и соответствующий ей индекс j=jm, для которой параметр Kj минимальный, для найденного таким образом значения индекса j=jm через параметры Мj и Nj определять дальность от приемного пункта с индексом j=jm до объекта
по Kj идентифицировать группу и соответствующий ей индекс j=jm, для которой параметр Kj минимальный, для найденного таким образом значения индекса j=jm через параметры Мj и Nj определять дальность от приемного пункта с индексом j=jm до объекта  и по
и по  и совокупностям параметров
и совокупностям параметров 
 sj определять параметры с размерностью длины
sj определять параметры с размерностью длины


и через них определять преимущественно пространственные координаты объекта (X0, Y0, Z0)



где α1=1, β1=0; α2=-1/2,  α3=-1/2,
α3=-1/2, 
| ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ ОБЪЕКТОВ ПО РАДИОСИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1994 |
|
RU2115137C1 |
| РАДИОТЕХНИЧЕСКАЯ СИСТЕМА НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1991 |
|
RU2018855C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2004 |
|
RU2263328C1 |
| RU 2003118800 A, 20.02.2005 | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |

