Изобретение относится к технике связи, а конкретнее - к способам приема радиосигналов от источников радиоизлучений (ИРИ), находящихся на объектах, в том числе подвижных, наземной пунктовой приемной системой, и может быть использовано преимущественно в радионавигационных системах для измерения пространственных координат и других характеристик ИРИ, функционально связанных с их координатами, в информационно-управляющих радиотехнических системах различного назначения и передаче информации. Способ может быть применен при испытаниях летательных аппаратов и их компонентов на полигонах для обеспечения работы измерительных систем, рационально размещенных на испытательной трассе, и формирования автоматизированного комплекса обработки принятых радиосигналов и разработки алгоритмического и программного обеспечения оценки характеристик испытываемых объектов.
Реализация способа позволит одновременно обслуживать несколько ИРИ, контролировать наземными средствами перемещение в пространстве ИРИ, упростить соответствующие системы, увеличить их технико-экономическую эффективность с учетом всех компонентов, влияющих на стоимость и технические показатели.
Известны способы приема радиосигналов, используемые в том числе в системах измерения координат ИРИ и основанные на применении угломерных, дальномерных, разностно- и суммарно-дальномерных и комбинированных методов определения местоположения объекта - носителя ИРИ с амплитудными, временными, частотными, фазовыми и импульсно-фазовыми методами измерения параметров радиосигнала [Патенты РФ №№2018855, 2115137, 2258242, 2309420, 2363117; Основы испытаний летательных аппаратов / Е.И.Кринецкий и др. Под ред. Е.И.Кринецкого. - М.: Машиностр., 1979, с.64-89; Радиотехнические системы / Ю.М.Казаринов и др. Под ред. Ю.М.Казаринова. - М.: ИЦ «Академия», 2008, гл.10; Быстров Р.П. и др. Пассивная радиолокация: методы обнаружения объектов. Под ред. Р.П.Быстрова и А.В.Соколова. - М.: Радиотехника, 2008, гл.6; Мельников Ю.П., Попов С.В. Радиотехническая разведка. Методы оценки эффективности местоопределения источников излучения. - М.: «Радиотехника», 2008, гл.5]. Известные способы имеют те или иные недостатки, например, необходимость механического перемещения антенной системы, необходимость априорной информации о местоположении ИРИ, невозможность однозначного определения координат ИРИ, ненадежность и др.
По критерию минимальной достаточности за прототип принят способ приема радиосигналов от источников радиоизлучений, находящихся на объектах, в том числе подвижных, и измерения информационных параметров, соответствующих радиосигналам и упомянутым объектам, наземной пунктовой приемной системой, фазовые центры приемных антенн каждого из приемных пунктов которой находятся в заданных точках в прямоугольной системе координат (ξ1,ξ2,ξ3) с началом координат в заданной точке О, находящейся на заданной высоте H над поверхностью земли, с плоскостью (O,ξ1,ξ2), параллельной плоскости, касательной к поверхности земли в точке пересечения оси Oξ3 с землей, при котором, принимая синхронизировано радиосигналы от источников радиосигналов, идентифицируя их при необходимости и регистрируя моменты времени приема радиосигналов, например, по временным положениям их передних фронтов, измеряют разности времен между моментами времен приемов радиосигналов на разных пунктах приемной системы [Патент РФ №2204145, 10.05.2003].
Преимуществом заявляемого способа приема радиосигналов от ИРИ, находящихся на объектах, наземной пунктовой приемной системой по сравнению с известными и прототипом является возможность повышения технико-экономической эффективности радиотехнических комплексов измерения пространственных координат и других характеристик объектов, функционально связанных с координатами. Это достигается тем, что на шести пунктах приема регистрируют моменты времени приема радиосигналов, передаваемых ИРИ. При этом фазовые центры антенн располагают определенным образом. Пространственные координаты определяют посредством косвенного измерения с использованием простых выражений, зависящих от измеренных разностей между временами приемов радиосигналов на пунктах.
Более высокая точность достигается в том числе за счет возможности выбора из совокупности предлагаемых в способе вариантов измерения координат ИРИ в каждой точке пространства наилучшего по точности. Это позволяет варьировать конфигурацию зоны действия радиотехнической системы и формировать ее в зависимости от поставленной задачи. Также способ исключает неоднозначность измерения координат и позволяет контролировать наземными средствами перемещение в пространстве источников радиоизлучений.
Для достижения указанного технического результата в способе приема радиосигналов от источников радиоизлучений, находящихся на объектах, в том числе подвижных, и измерения информационных параметров, соответствующих радиосигналам и упомянутым объектам, наземной пунктовой приемной системой, фазовые центры приемных антенн каждого из приемных пунктов которой находятся в заданных точках в прямоугольной системе координат (ξ1,ξ2,ξ3) с началом координат в заданной точке О, находящейся на заданной высоте H над поверхностью земли, с плоскостью (O,ξ1,ξ2), параллельной плоскости, касательной к поверхности земли в точке пересечения оси Оξ3 с землей, при котором, принимая синхронизировано радиосигналы от источников радиосигналов, идентифицируя их при необходимости и регистрируя моменты времени приема радиосигналов, например, по временным положениям их передних фронтов, измеряют разности времен между моментами времен приемов радиосигналов на разных пунктах приемной системы, в соответствии с настоящим изобретением наземная пунктовая приемная система выполнена с шестью пунктами приема, упорядоченными заданным образом, в каждом из которых преимущественно ненаправленными приемными антеннами, фазовые центры которых расположены в вершинах эллипсоида с центром в точке О с заданными координатами вершин (r1;0;0), (-r1;0;0), (0;r2;0), (0;-r2;0), (0;0;r3), (0;0;-r3), где r1,r2,r3 - заданные значения полуосей упомянутого эллипсоида, соответствующих осям координат ξ1,ξ2,ξ3, при этом значение полуоси r3 задано меньшим упомянутой высоты H, принимают радиосигналы от источника радиоизлучения, передаваемые по одному в интервале передачи, с заданным временем интервала, не обязательно одинаковым от интервала к интервалу, выделяют принятые и неотраженные от поверхности земли радиосигналы, например экранируя радиосигналы, отраженные от земли, производят соответственно индексу j шесть групп измерений разностей Δti,j между моментами времен приемов радиосигналов на i-тых пунктах и моментами времен приемов радиосигналов на j-тых пунктах приемной системы, при этом при каждом значении индекса j, изменяющегося от 1 до 6, индекс i принимает значения от 1 до 6, по совокупности измеренных указанных групп разностей времен Δti,j через имеющие размерность длины параметры di,j=сΔti,j, где с - скорость распространения радиосигнала, для каждой j-той из шести упомянутых групп трижды измеряют дальности Dj,k в соответствии с индексом k, принимающим значения 1, 2 и 3, от объекта до соответствующих j-тых пунктов приема в соответствии с выражением  , где индекс k1=(k2-3k+4)/2 и индекс k2=(5k-k2)/2, безразмерный множитель
, где индекс k1=(k2-3k+4)/2 и индекс k2=(5k-k2)/2, безразмерный множитель  , а безразмерные коэффициенты Аm,k соответственно равны A0,k=(9k2-45k+36)/2, A1,k=-(39k2-180k+126)/4, А2,k=(49k2-214k+134)/8, A3,k=-(6k2-25k+14)/4, A4,k=(k2-4k+2)/8, и через них измеряют преимущественно пространственные координаты объекта, при этом в каждом упомянутом интервале каждую из координат объекта измеряют шестикратно, в соответствии с выражением
, а безразмерные коэффициенты Аm,k соответственно равны A0,k=(9k2-45k+36)/2, A1,k=-(39k2-180k+126)/4, А2,k=(49k2-214k+134)/8, A3,k=-(6k2-25k+14)/4, A4,k=(k2-4k+2)/8, и через них измеряют преимущественно пространственные координаты объекта, при этом в каждом упомянутом интервале каждую из координат объекта измеряют шестикратно, в соответствии с выражением  , где индекс i=j+3θn,j, а соответствующий номеру координаты индекс n и упомянутый индекс k принимают значения 1, 2 и 3, причем при n=1 индекс j принимает значения 1 и 4, а безразмерный множитель θn,j=(5-2j)/3, при n=2 индекс 7 принимает значения 2 и 5, а безразмерный множитель θn,j=(7-2j)/3, при n=3 индекс j принимает значения 3 и 6, а безразмерный множитель θn,j=(9-2j)/3, производят совокупность заданного числа М следующих подряд упомянутых интервалов с общей длительностью времени передачи совокупности, равной сумме времен входящих в нее М интервалов, производят преимущественно измерения статистических характеристик статистическими методами траекторных измерений для каждой координаты, шестикратно измеряемой в интервале передачи, по всей совокупности М интервалов, в том числе математических ожиданий координат и среднеквадратических отклонений математических ожиданий координат соответствующих траекторий, при этом каждую из координат в заданный момент времени из длительности времени передачи совокупности М интервалов измеряют преимущественно как одну из шести соответствующих ей математических ожиданий координат с минимальным среднеквадратическим отклонением математического ожидания координаты, из предыдущей совокупности исключают первый интервал и включают интервал, следующий за последним интервалом предыдущей совокупности, и в последующих совокупностях, полученных таким образом из М интервалов, повторяют все указанные действия в упомянутом порядке, а при необходимости по измеренным в заданные моменты времени значениям координат измеряют другие параметры движения объекта.
, где индекс i=j+3θn,j, а соответствующий номеру координаты индекс n и упомянутый индекс k принимают значения 1, 2 и 3, причем при n=1 индекс j принимает значения 1 и 4, а безразмерный множитель θn,j=(5-2j)/3, при n=2 индекс 7 принимает значения 2 и 5, а безразмерный множитель θn,j=(7-2j)/3, при n=3 индекс j принимает значения 3 и 6, а безразмерный множитель θn,j=(9-2j)/3, производят совокупность заданного числа М следующих подряд упомянутых интервалов с общей длительностью времени передачи совокупности, равной сумме времен входящих в нее М интервалов, производят преимущественно измерения статистических характеристик статистическими методами траекторных измерений для каждой координаты, шестикратно измеряемой в интервале передачи, по всей совокупности М интервалов, в том числе математических ожиданий координат и среднеквадратических отклонений математических ожиданий координат соответствующих траекторий, при этом каждую из координат в заданный момент времени из длительности времени передачи совокупности М интервалов измеряют преимущественно как одну из шести соответствующих ей математических ожиданий координат с минимальным среднеквадратическим отклонением математического ожидания координаты, из предыдущей совокупности исключают первый интервал и включают интервал, следующий за последним интервалом предыдущей совокупности, и в последующих совокупностях, полученных таким образом из М интервалов, повторяют все указанные действия в упомянутом порядке, а при необходимости по измеренным в заданные моменты времени значениям координат измеряют другие параметры движения объекта.
В существующем уровне техники не выявлено источников информации, которые содержали бы сведения о способах того же назначения с указанной совокупностью отличительных признаков, что позволяет считать заявляемый способ новым и имеющим изобретательский уровень. Ниже изобретение описано более детально.
Сущность способа заключается в следующем.
Источники радиоизлучений, находящиеся на объектах, в том числе подвижных, посылают радиосигналы. Их принимает наземная приемная система, фазовые центры приемных антенн каждого из приемных пунктов которой находятся в заданных точках в прямоугольной системе координат (ξ1,ξ2,ξ3) с началом координат в заданной точке О, находящейся на заданной высоте H над поверхностью земли, с плоскостью (O,ξ1,ξ2), параллельной плоскости, касательной к поверхности земли в точке пересечения оси Oξ3 с землей. На приемных пунктах, принимая синхронизировано радиосигналы от источников радиоизлучения, идентифицируя их при необходимости и регистрируя моменты времени приема радиосигналов, например, по временным положениям их передних фронтов, измеряют разности времен между моментами времен приемов радиосигналов на разных пунктах приемной системы.
Технический результат, заключающийся в повышении технико-экономической эффективности радионавигационных систем измерения пространственных координат и других характеристик ИРИ, функционально связанных с его координатами, достигается за счет того, что наземная пунктовая приемная система выполнена с шестью пунктами приема, упорядоченными заданным образом. Радиосигналы от ИРИ принимают преимущественно ненаправленными приемными антеннами, фазовые центры которых расположены в вершинах эллипсоида с центром в точке О с заданными координатами вершин (r1;0;0), (-r1;0;0), (0;r2;0), (0;-r2;0), (0;0;r3), (0;0;-r3),где r1,r2,r3 - заданные значения полуосей упомянутого эллипсоида, соответствующих осям координат (ξ1,ξ2,ξ3), при этом значение полуоси r3 задано меньшим упомянутой высоты Н. ИРИ передает радиосигналы по одному в интервале передачи, с заданным временем интервала, не обязательно одинаковым от интервала к интервалу. На приемных пунктах выделяют принятые и неотраженные от поверхности земли радиосигналы, например, экранируя радиосигналы, отраженные от земли. По принятым радиосигналам производят соответственно индексу j шесть групп измерений разностей Δti,j между моментами времен приемов радиосигналов на i-тых пунктах и моментами времен приемов радиосигналов на j-тых пунктах приемной системы. При этом при каждом значении индекса j, изменяющегося от 1 до 6, индекс i принимает значения от 1 до 6. По совокупности измеренных указанных групп разностей времен Δti,j через имеющие размерность длины параметры di,j=cΔti,j, где с - скорость распространения радиосигнала, для каждой j-той из шести упомянутых групп трижды (в соответствии с индексом k, принимающим значения 1, 2 и 3) измеряют дальности Dj,k от объекта до соответствующих j-тых пунктов приема в соответствии с выражением
 . Здесь индекс k1=(k2-3k+4)/2 и индекс k2=(5k-k2)/2, безразмерный множитель
. Здесь индекс k1=(k2-3k+4)/2 и индекс k2=(5k-k2)/2, безразмерный множитель  , а безразмерные коэффициенты Am,k соответственно равны А0,k=(9k2-45k+36)/2, A1,k=-(39k2-180k+126)/4, A2,k=(49k2-214k+134)/8, A3,k=-(6k2-25k+14)/4, A4,k=(k2-4k+2)/8. Затем измеряют преимущественно пространственные координаты объекта в соответствии с выражением
, а безразмерные коэффициенты Am,k соответственно равны А0,k=(9k2-45k+36)/2, A1,k=-(39k2-180k+126)/4, A2,k=(49k2-214k+134)/8, A3,k=-(6k2-25k+14)/4, A4,k=(k2-4k+2)/8. Затем измеряют преимущественно пространственные координаты объекта в соответствии с выражением  где индекс i=j+3θn,j, а соответствующий номеру координаты индекс n и упомянутый индекс k принимают значения 1, 2 и 3, причем при n=1 индекс j принимает значения 1 и 4, а безразмерный множитель θn,j=(5-2j)/3, при n=2 индекс j принимает значения 2 и 5, а безразмерный множитель θn,j=(7-2j)/3, при n=3 индекс j принимает значения 3 и 6, а безразмерный множитель θn,j=(9-2j)/3. При этом в каждом упомянутом интервале каждую из координат объекта измеряют шестикратно. Производят совокупность заданного числа М следующих подряд упомянутых интервалов с общей длительностью времени передачи совокупности, равной сумме времен входящих в нее М интервалов. При этом производят преимущественно измерения статистических характеристик статистическими методами траекторных измерений для каждой координаты, шестикратно измеряемой в интервале передачи, по всей совокупности М интервалов, в том числе математических ожиданий координат и среднеквадратических отклонений математических ожиданий координат соответствующих траекторий [Б.Ф.Жданюк. Основы статистической обработки траекторных измерений - М.: Сов. радио, 1978 - 384 с.]. Каждую из координат измеряют в заданный момент времени (из длительности времени передачи совокупности М интервалов) преимущественно как одну из шести соответствующих ей математических ожиданий координат с минимальным среднеквадратическим отклонением математического ожидания координаты. Этим обеспечивают более высокую точность измерений координат объекта, производимых в каждой точке пространства. Затем из предыдущей совокупности исключают первый интервал и включают интервал, следующий за последним интервалом предыдущей совокупности, и в последующих совокупностях, полученных таким образом из М интервалов, повторяют все указанные действия в упомянутом порядке. При необходимости по измеренным в заданные моменты времени значениям координат измеряют другие параметры движения объекта.
где индекс i=j+3θn,j, а соответствующий номеру координаты индекс n и упомянутый индекс k принимают значения 1, 2 и 3, причем при n=1 индекс j принимает значения 1 и 4, а безразмерный множитель θn,j=(5-2j)/3, при n=2 индекс j принимает значения 2 и 5, а безразмерный множитель θn,j=(7-2j)/3, при n=3 индекс j принимает значения 3 и 6, а безразмерный множитель θn,j=(9-2j)/3. При этом в каждом упомянутом интервале каждую из координат объекта измеряют шестикратно. Производят совокупность заданного числа М следующих подряд упомянутых интервалов с общей длительностью времени передачи совокупности, равной сумме времен входящих в нее М интервалов. При этом производят преимущественно измерения статистических характеристик статистическими методами траекторных измерений для каждой координаты, шестикратно измеряемой в интервале передачи, по всей совокупности М интервалов, в том числе математических ожиданий координат и среднеквадратических отклонений математических ожиданий координат соответствующих траекторий [Б.Ф.Жданюк. Основы статистической обработки траекторных измерений - М.: Сов. радио, 1978 - 384 с.]. Каждую из координат измеряют в заданный момент времени (из длительности времени передачи совокупности М интервалов) преимущественно как одну из шести соответствующих ей математических ожиданий координат с минимальным среднеквадратическим отклонением математического ожидания координаты. Этим обеспечивают более высокую точность измерений координат объекта, производимых в каждой точке пространства. Затем из предыдущей совокупности исключают первый интервал и включают интервал, следующий за последним интервалом предыдущей совокупности, и в последующих совокупностях, полученных таким образом из М интервалов, повторяют все указанные действия в упомянутом порядке. При необходимости по измеренным в заданные моменты времени значениям координат измеряют другие параметры движения объекта.
Способ позволяет варьировать конфигурацию зоны действия радионавигационной системы и формировать ее в зависимости от поставленной задачи. Можно получать зоны с погрешностью в зоне, не превышающей заданной погрешности измерения координат на границе зоны. Способ обладает достаточным быстродействием измерения координат и параметров ИРИ при сохранении заданной точности и может быть реализован с помощью современной элементной базы и микропроцессорной техники.
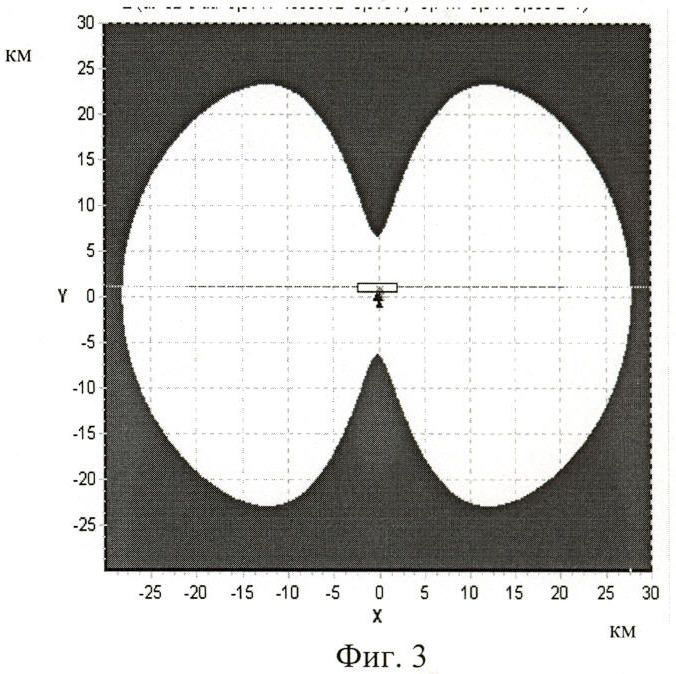
Для заявляемого способа на фигурах 1…4 ограничимся примером определения зон, обозначенных светлым тоном, внутри которых и на их границах среднеквадратические ошибки измерения значений координаты ξ3 в плоскости (O′,ξ1,ξ2), расположенной на высоте движения объекта OO′, равной 1000 метров (ξ3=1000 м), не превышают заданного значения 10 метров. Заданы высота H=20 метров, значения r1=300 м, r2=700 м, r3=15 м. Прямоугольником обозначен размер и ориентация взлетно-посадочной полосы условного аэродрома, значками обозначены расположения фазовых центров антенн передающих пунктов. На фиг.1 представлена указанная зона при упомянутом индексе k=1 композиции группы измерений с индексом j, равным 3, и группы с индексом j, равным 6, на фиг.2 - соответственно при индексе k=2 композиции группы измерений с индексом j, равным 3, и группы с индексом j, равным 6, на фиг.3 - соответственно при индексе k=3 композиции группы измерений с индексом j, равным 3, и группы с индексом j, равным 6. На фиг.4 представлена указанная зона для общей композиции, объединяющей указанные композиции, соответствующие фиг.1, 2 и 3, в которой координату ξ3 определяют в заданный момент времени преимущественно как одну из шести соответствующих ей математических ожиданий координат с минимальным среднеквадратическим отклонением математического ожидания координаты.
Перечислим основные достоинства способа:
- обеспечивает однозначное измерение пространственных координат объекта с заданной точностью,
- может быть реализован с использованием существующей элементной базы и микропроцессорной техники,
- обеспечивает эффективное использование радиочастотного спектра,
- позволяет одновременно обслуживать несколько объектов,
- позволяет варьировать конфигурацию указанной зоны действия радионавигационной системы и формировать ее в зависимости от поставленной задачи и особенностей рельефа окружающей местности.
Результативность и эффективность использования заявляемого способа приема радиосигналов от источника радиоизлучения, находящегося на объекте, в том числе подвижном, и его приема наземной шестипунктовой приемной системой состоит в том, что он может быть применен на практике для развития и совершенствования радионавигационных систем измерения координат ИРИ, а также в других приложениях. Способ позволяет измерять их однозначно простыми по сравнению с известными методами.
Таким образом, отличительные признаки заявляемого способа обеспечивают появление новых свойств, не достигаемых в прототипе и аналогах. Проведенный анализ позволил установить: аналоги с совокупностью признаков, тождественных всем признакам заявленного технического решения, отсутствуют, что указывает на соответствие заявленного способа условию «новизны».
Результаты поиска известных решений, в том числе имеющих отношение к радиопеленгации, радионавигации, радиоуправлению и связи, с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленного способа, показали, что они не следуют явным образом из уровня техники. Также не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения действий на достижение указанного результата. Следовательно, заявленное изобретение соответствует условию патентоспособности «изобретательский уровень».
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПРИЕМА РАДИОСИГНАЛОВ ОТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2011 |
|
RU2468380C1 |
| СПОСОБ ПРИЕМА РАДИОСИГНАЛОВ НА ОБЪЕКТАХ | 2011 |
|
RU2468513C1 |
| СИСТЕМА ПРИЕМА РАДИОСИГНАЛОВ НА ОБЪЕКТЕ | 2011 |
|
RU2465728C1 |
| СПОСОБ ПРИЕМА РАДИОСИГНАЛОВ ОТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2010 |
|
RU2453995C1 |
| СИСТЕМА ПРИЕМА РАДИОСИГНАЛОВ ОТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ | 2011 |
|
RU2453997C1 |
| СИСТЕМА ПРИЕМА РАДИОСИГНАЛОВ НА ОБЪЕКТАХ | 2011 |
|
RU2453996C1 |
| СПОСОБ ПРИЕМА РАДИОСИГНАЛОВ НА ОБЪЕКТАХ | 2010 |
|
RU2453999C1 |
| СПОСОБ ПЕРЕДАЧИ РАДИОСИГНАЛОВ ИСТОЧНИКАМИ РАДИОИЗЛУЧЕНИЙ | 2010 |
|
RU2436242C1 |
| СПОСОБ ПЕРЕДАЧИ РАДИОСИГНАЛОВ ИСТОЧНИКАМИ РАДИОИЗЛУЧЕНИЙ | 2010 |
|
RU2432713C1 |
| СПОСОБ ПЕРЕДАЧИ РАДИОСИГНАЛОВ ИСТОЧНИКАМИ РАДИОИЗЛУЧЕНИЙ | 2010 |
|
RU2432682C1 |
Изобретение относится к технике связи и может использоваться преимущественно для однозначного определения пространственных координат объекта - источника радиоизлучения (ИРИ), в том числе в системах навигации и посадки летательных аппаратов. Технический результат - повышение эффективности определения координат соответствующих радиотехнических комплексов, возможность варьирования конфигурации зоны их действия в зависимости от поставленной задачи и особенностей рельефа окружающей местности. Для этого на шести наземных пунктах приема, фазовые центры антенн которых расположены определенным образом, регистрируют моменты времени приема радиосигналов ИРИ. Координаты определяют посредством косвенного измерения с использованием предложенных простых выражений. Высокая точность достигается в том числе благодаря возможности выбора из совокупности предлагаемых в способе вариантов измерения координат объекта в каждой точке пространства наилучшего по точности. 4 ил.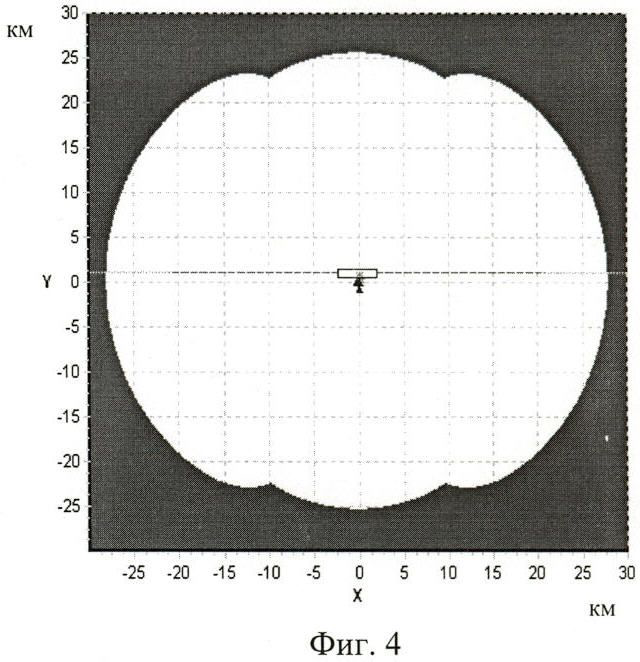
Способ приема радиосигналов от источников радиоизлучений, находящихся на объектах, в том числе подвижных, и измерения информационных параметров, соответствующих радиосигналам и упомянутым объектам, наземной пунктовой приемной системой, фазовые центры приемных антенн каждого из приемных пунктов которой находятся в заданных точках в прямоугольной системе координат (ξ1, ξ2, ξ3) с началом координат в заданной точке О, находящейся на заданной высоте Н над поверхностью земли, с плоскостью (О, ξ1, ξ2) параллельной плоскости, касательной к поверхности земли в точке пересечения оси Оξ3 с землей, при котором, принимая синхронизированно радиосигналы от источников радиосигналов, идентифицируя их при необходимости и регистрируя моменты времени приема радиосигналов, например по временным положениям их передних фронтов, измеряют разности времен между моментами времен приемов радиосигналов на разных пунктах приемной системы, отличающийся тем, что наземная пунктовая приемная система выполнена с шестью пунктами приема, упорядоченными заданным образом, в каждом из которых преимущественно ненаправленными приемными антеннами, фазовые центры которых расположены в вершинах эллипсоида с центром в точке О с заданными координатами вершин (r1; 0; 0), (-r1; 0; 0), (0; r2; 0), (0; -r2; 0), (0; 0; r3), (0; 0; -r3), где r1, r2, r3 - заданные значения полуосей упомянутого эллипсоида, соответствующих осям координат ξ1, ξ2, ξ3, при этом значение полуоси r3 задано меньшим упомянутой высоты Н, принимают радиосигналы от источника радиоизлучения, передаваемые по одному в интервале передачи, с заданным временем интервала, необязательно одинаковым от интервала к интервалу, выделяют принятые и неотраженные от поверхности земли радиосигналы, например, экранируя радиосигналы, отраженные от земли, производят соответственно индексу j шесть групп измерений разностей Δti,j между моментами времен приемов радиосигналов на i-х пунктах и моментами времен приемов радиосигналов на j-х пунктах приемной системы, при этом при каждом значении индекса j, изменяющегося от 1 до 6, индекс i принимает значения от 1 до 6, по совокупности измеренных указанных групп разностей времен Δti,j через имеющие размерность длины параметры di,j=cΔti,j, где с - скорость распространения радиосигнала, для каждой j-й из шести упомянутых групп трижды измеряют дальности Dj,k в соответствии с индексом k, принимающим значения 1, 2 и 3, от объекта до соответствующих j-х пунктов приема в соответствии с выражением 
где индекс k1=(k2-3k+4)/2 и индекс k2=(5k-k2)/2, безразмерный множитель  , а безразмерные коэффициенты Am,k соответственно равны A0,k=(9k2-45k+36)/2, A1,k=-(39k2-180k+126)/4, А2,k=(49k2-214k+134)/8, A3,k=-(6k2-25k+14)/4, A4,k=(k2-4k+2)/8, и через них измеряют преимущественно пространственные координаты объекта, при этом в каждом упомянутом интервале каждую из координат объекта измеряют шестикратно, в соответствии с выражением
, а безразмерные коэффициенты Am,k соответственно равны A0,k=(9k2-45k+36)/2, A1,k=-(39k2-180k+126)/4, А2,k=(49k2-214k+134)/8, A3,k=-(6k2-25k+14)/4, A4,k=(k2-4k+2)/8, и через них измеряют преимущественно пространственные координаты объекта, при этом в каждом упомянутом интервале каждую из координат объекта измеряют шестикратно, в соответствии с выражением 
где индекс i=j+3θn,j, а соответствующий номеру координаты индекс n и упомянутый индекс k принимают значения 1, 2 и 3, причем при n=1 индекс j принимает значения 1 и 4, а безразмерный множитель θn,j=(5-2j)/3, при n=2 индекс j принимает значения 2 и 5, а безразмерный множитель θn,j=(7-2j)/3, при n=3 индекс j принимает значения 3 и 6, а безразмерный множитель θn,j=(9-2j)/3, производят совокупность заданного числа М следующих подряд упомянутых интервалов с общей длительностью времени передачи совокупности, равной сумме времен входящих в нее М интервалов, производят преимущественно измерения статистических характеристик статистическими методами траекторных измерений для каждой координаты, шестикратно измеряемой в интервале передачи, по всей совокупности М интервалов, в том числе математических ожиданий координат и среднеквадратических отклонений математических ожиданий координат соответствующих траекторий, при этом каждую из координат в заданный момент времени из длительности времени передачи совокупности М интервалов измеряют преимущественно как одну из шести соответствующих ей математических ожиданий координат с минимальным среднеквадратическим отклонением математического ожидания координаты, из предыдущей совокупности исключают первый интервал и включают интервал, следующий за последним интервалом предыдущей совокупности, и в последующих совокупностях, полученных таким образом из М интервалов, повторяют все указанные действия в упомянутом порядке, а при необходимости по измеренным в заданные моменты времени значениям координат измеряют другие параметры движения объекта.
| ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ ОБЪЕКТОВ ПО РАДИОСИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1994 |
|
RU2115137C1 |
| РАДИОТЕХНИЧЕСКАЯ СИСТЕМА НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1991 |
|
RU2018855C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2004 |
|
RU2263328C1 |
| RU 2003118800 А, 20.02.2005 | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |

