Изобретение относится к электрическим двигателям, а именно к вентильным двигателям, и может найти применение в различных электроприводах, в том числе и в качестве гиродвигателя.
Известно, что коллекторные двигатели постоянного тока широко применяются для привода самых различных механизмов, особенно в приводах автономных систем. Широкому распространению коллекторных двигателей способствует целый ряд положительных качеств, по которым они выгодно отличаются от асинхронных и синхронных двигателей [Юферов Ф.М. Электрические машины автоматических устройств. - М.: Высшая школа, 1988, с.с.200-203, 308-311]: возможность получения самых различных частот вращения; просто, плавно и экономично в широком диапазоне изменять частоту вращения; сравнительно высокий КПД; большие пусковые моменты при небольших пусковых токах; малые габаритные размеры и масса. Коллекторные двигатели весьма разнообразны по конструкции. Их конструктивные особенности определяются назначением, областью применения, требованиями схем, в которых они применяются, и др. Характеристики двигателей во многом определяются способом их возбуждения. Классифицируя по способу возбуждения, коллекторные двигатели постоянного тока подразделяются на двигатели с независимым, параллельным, последовательным и смешанным возбуждением. В схемах автоматики в настоящее время наиболее распространены двигатели постоянного тока с возбуждением от постоянных магнитов.
Однако двигатели постоянного тока обычного исполнения с механическим коммутатором - коллектором имеют ряд существенных недостатков, обусловленных наличием щеточно-коллекторного узла. Эти недостатки, приводящие к резкому снижению надежности работы двигателей, ограничивают области их применения.
Известно также, что в последнее время появились и начали находить все более широкое применение бесконтактные двигатели постоянного тока не с механическим (щетка-коллектор), а с полупроводниковым коммутатором. Эти двигатели, обладая практически всеми положительными свойствами обычных двигателей постоянного тока, лишены их основного недостатка - наличия щеточно-коллекторного узла. Такие двигатели также называют вентильными. Конструктивно вентильные двигатели выполняются обращенными. Как правило, эти двигатели состоят из трех элементов: 1) бесконтактного двигателя с многофазной обмоткой на статоре и возбужденным ротором (обычно в виде постоянного магнита); 2) датчика положения ротора, изготовленного в одном корпусе с двигателем, вырабатывающего сигналы управления, определяющие момент времени и последовательность коммутации обмоток двигателя; 3) бесконтактного коммутатора, осуществляющего по сигналам датчика положения коммутацию токов в обмотках статора двигателя [Юферов Ф.М. Электрические машины автоматических устройств. - М.: Высшая школа, 1988, с.с.212-214]. Положительные свойства вентильных двигателей дают возможность использовать их в тяжелых условиях эксплуатации, в частности для систем управления космическими аппаратами.
Наиболее близким к заявляемому изобретению по использованию, технической сущности и достигаемому техническому результату является двигатель, применяемый в двигателе-маховике [Управляемые бесконтактные двигатели постоянного тока/ Н.П.Адволоткин, В.Т.Гращенков, Н.И.Лебедев и др.- Л.: Энергоатомиздат, Ленинград, отд-ние, 1984, с.142]. Этот двигатель выбираем в качестве прототипа изобретения. Данный двигатель содержит ротор в виде системы постоянных магнитов и магнитопровода. В зазоре между магнитами и магнитопроводом находится статорная обмотка, выполненная из обмоточного провода. Эта обмотка помещена в диэлектрический сердечник, выполненный из эпоксидной смолы с высокой теплопроводностью. В качестве чувствительных элементов датчика положения ротора используют элементы Холла. Нечувствительность редкоземельных магнитов, из которых выполнен ротор вентильного двигателя, к размагничивающему действию токов статора, позволяет обеспечить долговременную работу двигателя в режиме больших токов, значения которых зависят лишь от температурной стойкости постоянных магнитов и, особенно, от изоляции обмоточного провода статорной обмотки.
Недостаток двигателя-прототипа заключается в том, что увеличение тока в статорной обмотке с целью повышения величины развиваемого двигателем момента может привести к разрушению (сгоранию) обмотки, так как отвод от нее тепла на корпус затруднен конструктивными особенностями ее исполнения: наличием пазовой изоляции при укладке проводников в ферромагнитный сердечник статора большинства вентильных двигателей, либо выполнением сердечника статора из диэлектрического материала, как осуществлено в двигателе-прототипе.
Поставлена задача разработать вентильный двигатель, обладающий большим моментом на валу за счет увеличения потребляемого тока, не перегревая активной части двигателя.
Эта задача решена следующим образом. Вентильный двигатель содержит ротор, состоящий из постоянного магнита и магнитопровода, разделенных зазором, и датчик положения ротора. В зазоре расположена двухсекционная многовитковая намотка из покрытой изоляцией электропроводящей ленты. Обе секции намотки размещены концентрически. В лентах, из которых выполнены обе секции, имеются узкие поперечные вырезы, чередующиеся с одного и другого боковых краев ленты так, что центры двух смежных пазов, расположенных на противоположных торцах секции и получаемых при ее намотке за счет совмещения вырезов, находятся на расстоянии, равном полюсному делению магнита ротора. Пазы второй секции сдвинуты на половину полюсного деления магнита ротора относительно аналогичных пазов первой секции. Контакты, связанные с началом и концом ленты каждой секции, подсоединены к выходам переключателей реверса, входы которых связаны с выходами коммутаторов, присоединенных к источнику питания. К управляющим входам коммутаторов подключены выходы датчика положения ротора. Управляющие входы переключателей реверса связаны с блоком задатчика реверса.
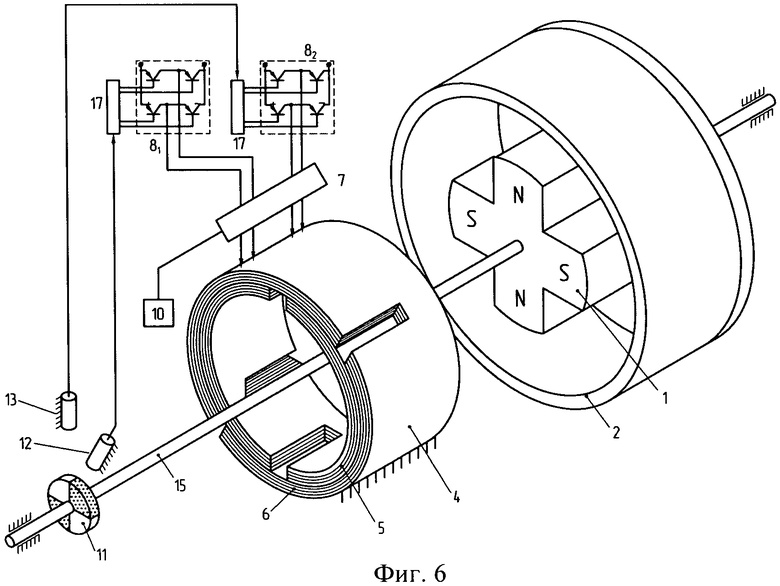
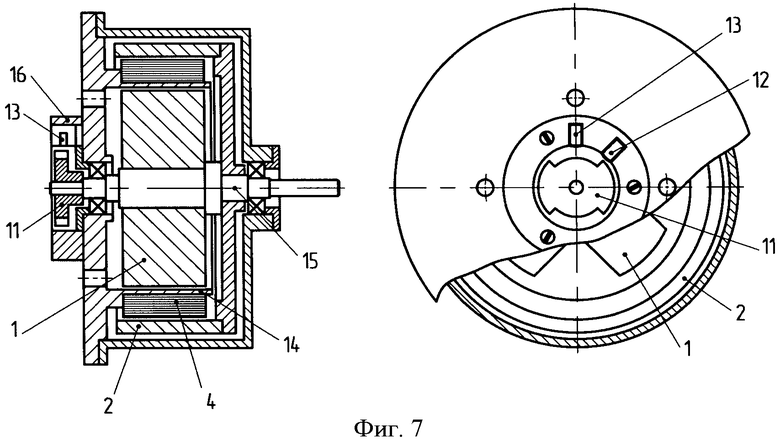
Изобретение поясняется следующим графическим материалом. На фиг.1 представлена структурная схема заявляемого вентильного двигателя; фиг.2 показывает принцип намотки секции; фиг.3 показывает характер протекания тока по витку секции; на фиг.4 поясняется принцип создания вращающего момента двигателя; фиг.5 поясняет принцип коммутации токов в секциях намотки; на фиг.6 представлена электрокинематическая схема двигателя и на фиг.7 показан вариант конструктивного исполнения двигателя.
Предлагаемый вентильный двигатель (фиг.1) содержит ротор в виде постоянного магнита 1 и магнитопровода 2, которые разделены воздушным зазором. Переключение секций активной части двигателя (в данном случае намотки) производится по сигналам датчика положения ротора 3. В зазоре между магнитом и магнитопроводом расположена двухсекционная многовитковая намотка 4, выполненная из покрытой слоем изоляции электропроводящей ленты. Обе секции в намотке выполнены концентрически. В ленте имеются узкие поперечные вырезы, чередующиеся с одного и другого боковых краев ленты так, что центры двух смежных пазов, получаемых при намотке секции за счет совмещения боковых вырезов и расположенных на противоположных торцах секции, находятся на расстоянии, равном полюсному делению магнита ротора. Пазы первой секции 5 сдвинуты на половину полюсного деления магнита ротора относительно аналогичных пазов второй секции 6. Контакты, связанные с началом и концом ленты каждой секции, подсоединены к выходам переключателей реверса 7, входы которых связаны с выходами коммутаторов 8, присоединенных к источнику питания 9. К управляющим входам коммутаторов подключены выходы датчика положения ротора 3, а управляющие входы переключателей реверса 7 связаны с блоком задатчика реверса 10.
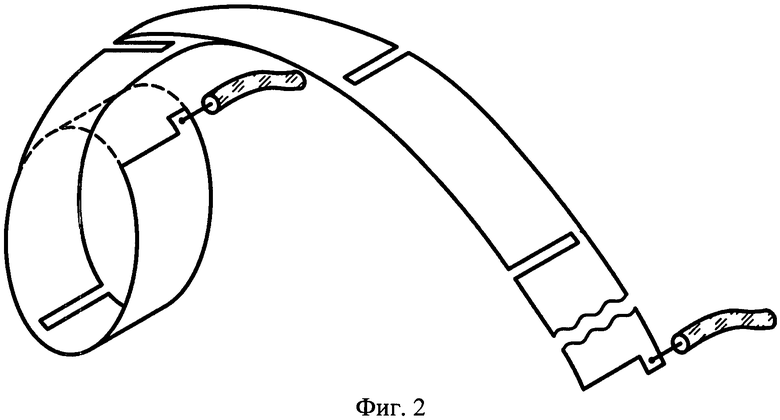
Сущность изобретения поясняется следующим образом. В предлагаемой конструкции двигателя тепло, выделяемое в активном элементе при протекании тока, должно с минимальным сопротивлением передаваться на корпус двигателя и затем рассеиваться в окружающем пространстве. Такие условия могут быть созданы, если активный элемент (намотка из ленты) будет расположен непосредственно на корпусе. Характер намотки ленты (получение секции) показан на фиг.2, где штриховой линией обозначена часть корпуса двигателя, на которую наматывается лента. К контактам, расположенным в начале и конце ленты, присоединяются проводники, по которым к секции подается электрический ток. Эффект создания в двигателе вращающего момента многовитковой секцией определяется произведением подобного эффекта одного витка на полное число витков секции, поэтому достаточно рассмотреть характер протекания тока по одному витку.
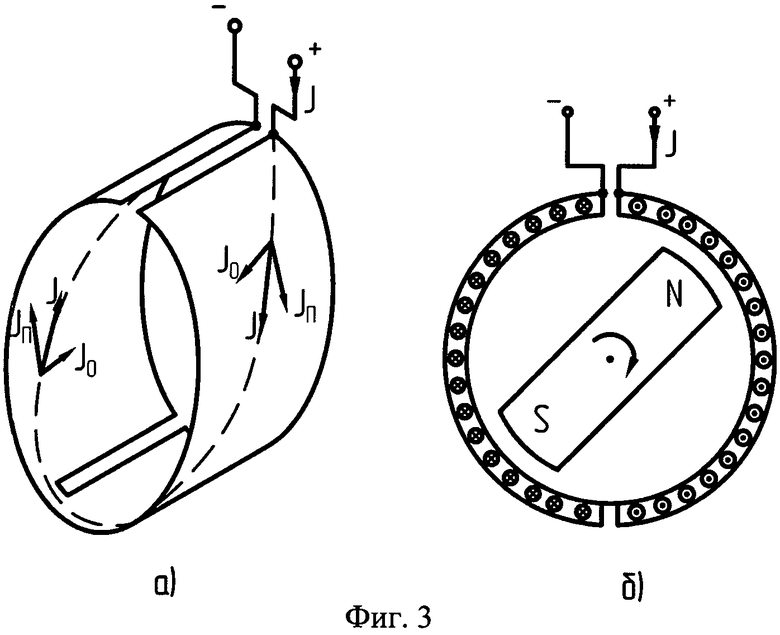
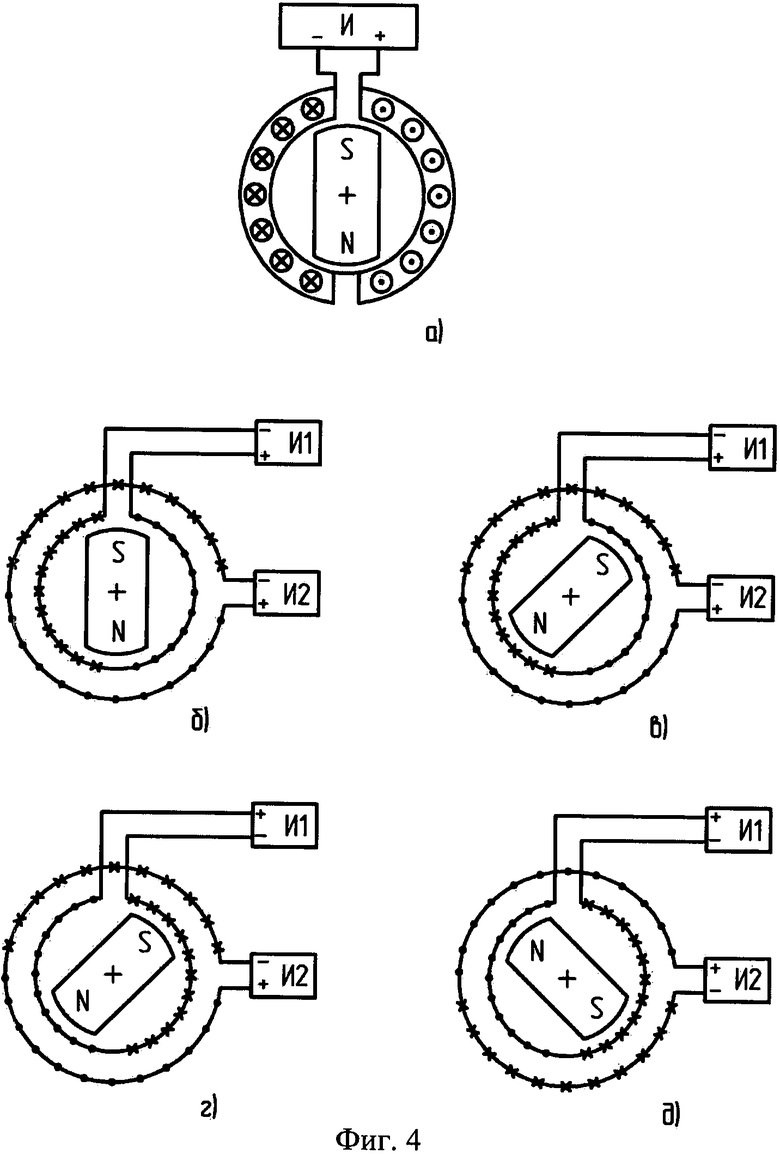
На фиг.3а показан один виток секции, подключенный к источнику питания. Поперечные вырезы в ленте вынуждают ток протекать в диагональных направлениях по участкам ленты, ограниченным смежными вырезами. В таком случае в каждой точке витка ленты у тока J имеются две составляющие: Jo направлена параллельно оси намотанной секции, Jп - перпендикулярно ей. Если внутри витка (секции) поместить постоянный магнит, как представлено на фиг.3б, то токи Jo будут создавать момент, вызывающий вращение магнита в направлении, показанном стрелкой. Токи Jo на фиг.3б показаны маленькими кружочками, в которых точка соответствует протеканию тока из плоскости рисунка, а крестик - в плоскость рисунка. Токи Jп в создании момента относительно оси вращения магнита не участвуют, их влияние проявляется только в увеличении нагрузки на опоры подвеса ротора-магнита, и в дальнейшем при пояснении принципа работы двигателя эти токи не рассматриваются. Под действием момента, создаваемого токами Jo ротор-магнит будет поворачиваться до тех пор, пока его магнитная ось N-S не совместится с центрами вырезов витка ленты. В этом случае магнитный поток каждого полюса магнита будет взаимодействовать с одинаковым количеством линий тока двух противоположных направлений, как показано на фиг.4а. Момент, развиваемый двигателем в этом положении ротора-магнита относительно витка ленты, будет равен нулю. Дальнейшее вращение ротора возможно при помощи второй секции намотки, концентрически расположенной относительно первой. На последующих рисунках виток второй секции показан внешним по отношению к витку первой секции, кроме того, с целью упрощения графического представления пояснений принципа работы двигателя, витки представлены в виде линий, у которых нанесенные на них точки представляют токи Jo, направленные из плоскости рисунка, а крестики - в плоскость рисунка. У витка второй секции поперечные вырезы сдвинуты относительно вырезов витка первой секции на половину полюсного деления магнита - в данном случае на 90° по часовой стрелке. Источники питания секций на фиг.4 обозначены как И1 и И2. При аналогичном с витком первой секции характере протекания тока по витку второй секции, момент на валу ротора-магнита, при положении последнего, показанном на фиг.4б, будет создаваться за счет тока второй секции, однако при дальнейшем повороте (фиг.4в) произойдет взаимная компенсация моментов, создаваемых противоположно направленными токами Jo витков первой и второй секций. Исключить возникающее при этом резкое уменьшение развиваемого момента можно за счет изменения направления протекания тока J в витке первой секции, как показано на фиг.4г. Переключение полярности источника И1 должно произойти в момент, когда магнитная ось N-S ротора-магнита совместится с центрами вырезов витка первой секции. При дальнейшем вращении ротора-магнита необходимо будет осуществить изменение направления тока в витке второй секции, когда ось N-S пересечет линию центров вырезов витка второй секции. Это положение ротора-магнита показано на фиг.4д. Анализируя все этапы поворота ротора, представленные на фиг.4, следует отметить то обстоятельство, что над полюсами магнита направления поперечных токов Jo обеих секций намотки должно совпадать. Изменение направления протекания токов J по виткам секций (переключение полярности источников И1, И2) осуществляется посредством датчика положения ротора. Этот датчик содержит ротор, механически связанный с ротором-магнитом двигателя, и два чувствительных элемента, каждый из которых коммутирует ток в соответствующей секции. Ротор датчика выполнен неоднородным (конструктивно или по свойствам материалов, из которых он изготовлен), причем граница неоднородности совпадает с направлением магнитной оси N-S ротора-магнита. Чувствительные элементы, которые определяют неоднородность ротора датчика, связаны с неподвижным корпусом двигателя и ось чувствительности каждого из них совпадает с линией, связывающей центры вырезов витков той секции, ток в которой они должны переключать.
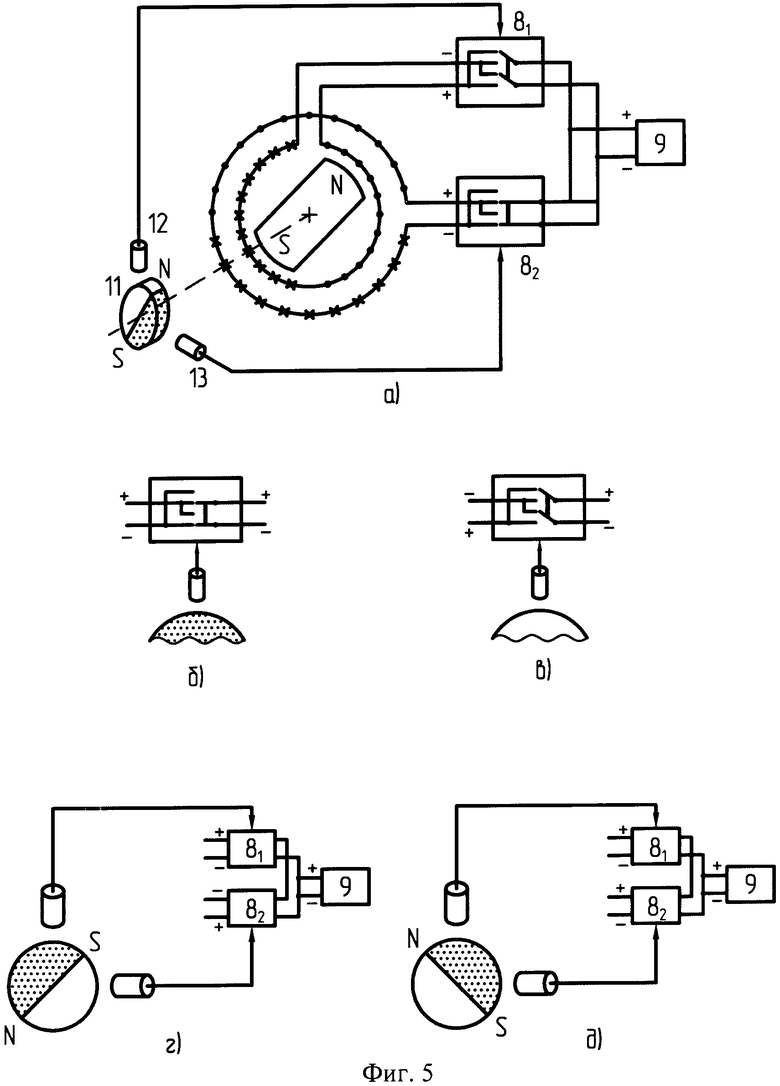
Закономерности переключения токов в витках секций поясняются фиг.5. Ротор 11 датчика неоднороден (состоит из двух частей). Чувствительные элементы 12 и 13 управляют схемами коммутаторов 81 и 82 соответственно. Схема 81 переключает направление тока в первой секции, схема 82 - во второй. Граница неоднородности ротора 11 совпадает по направлению с магнитной осью N-S ротора-магнита двигателя. Предположим, что если ротор датчика расположен относительно чувствительных элементов 12 и 13 так, как показано на фиг.5б, 5в, то подвижные контакты схем коммутаторов 81 и 82 занимают соответствующие сигналам чувствительных элементов положения и обеспечивают протекание по виткам секций токов от источника питания 9. Направления протекания токов соответствуют полярности напряжений, показанных на выходах схем коммутаторов 81 и 82. На фиг.5г, 5д показаны полярности напряжений на выходах схем коммутаторов при положениях ротора датчика (а следовательно, ротора-магнита), которые соответствуют фиг.4г, 4д. Нетрудно показать, что и при других положениях ротора-магнита полярности источников И1, И2 (фиг.4) и полярности напряжений на выходах схем коммутаторов 81, 82 (фиг.5) совпадают, что свидетельствует о возможности непрерывного вращения ротора-магнита двигателя. Изменение направления вращения (реверс) предлагаемого двигателя можно осуществить путем одновременного изменения направлений протекания токов по виткам обеих секций, что достигается либо установкой дополнительных переключающих устройств между выходами схем коммутаторов и секциями, либо изменением (обменом) уровней (или полярностей) сигналов, снимаемых с чувствительных элементов 12 и 13 датчика положения ротора.
Пример технической реализации изобретения поясняется фиг.6 и 7. С целью повышения момента двигателя ротор-магнит 1 выполняют четырехполюсным. В зазоре между ротором-магнитом и магнитопроводом 2 помещают двухсекционную обмотку 4, расположенную на трубчатой части крышки корпуса 14. Намотка на фиг.6 показана состоящей из двух секций: внутренней 5 и внешней 6, однако намотка двух секций может производиться одновременно двумя сложенными лентами. Смежные пазы каждой из секций, расположенные на их торцах, находятся на расстоянии, равном полюсному делению ротора-магнита, которое в данном случае равно 90°. Аналогичные пазы внешней секции 6 сдвигают на половину полюсного деления ротора-магнита (45°) относительно пазов внутренней секции 5. На одном валу 15 с ротором-магнитом 1 и магнитопроводом 2 закрепляют ротор 11 датчика положения ротора, а в качестве чувствительных элементов 12 и 13 последнего используют индуктивные датчики, которые в кольце 16 устанавливают таким образом, что их оси чувствительности лежат в плоскостях, образованных осью вращения двигателя и линиями центров пазов соответствующих секций, токи в которых чувствительные элементы должны коммутировать. При указанных условиях угол между осями чувствительности равен 45°. Ротор 11 датчика выполнен неоднородным, дуга большого радиуса соответствует полюсному делению магнита ротора (90°), а места резкого изменения радиуса совпадают с направлениями центров полюсов ротора-магнита. Сигналы с чувствительных элементов 12 и 13 поступают на схемы преобразователей 17, которые управляют реверсивными транзисторными ключами 8, коммутирующими токи в секциях. Переключатель реверса 7 по командам с задатчика реверса 10 меняет направления токов, протекающих по секциям. Функционально переключатель реверса 7 может быть выполнен аналогично схемам коммутаторов 81, 82, показанным на фиг.5.
Технический результат изобретения: увеличение момента, развиваемого двигателем.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕНТИЛЬНЫЙ МОМЕНТНЫЙ ДВИГАТЕЛЬ | 2019 |
|
RU2709471C1 |
| МОМЕНТНЫЙ ДВИГАТЕЛЬ | 2010 |
|
RU2441310C1 |
| Вентильный электродвигатель | 1978 |
|
SU758416A1 |
| Репульсионный вентильный электродвигатель | 1977 |
|
SU666619A1 |
| Электродвигатель | 1978 |
|
SU748702A1 |
| Вентильный электродвигатель | 1977 |
|
SU765946A1 |
| ЭЛЕКТРОДВИГАТЕЛЬ | 2020 |
|
RU2726627C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1992 |
|
RU2025872C1 |
| Асинхронное мотор-колесо с повышенным магнитным сцеплением | 2018 |
|
RU2706669C1 |
| Вентильный электродвигатель и способ его настройки | 1989 |
|
SU1772875A1 |
Изобретение относится к области электротехники, в частности к вентильным электродвигателям, и может быть использовано в различных электроприводах, в том числе в качестве гиродвигателя. Технический результат достигается следующим образом. Активный элемент представляет собой двухсекционную намотку из изолированной токопроводящей ленты, на которой выполнены узкие поперечные вырезы, чередующиеся с одного и другого боковых краев ленты и образующие при намотке ленты пазы в торцах секций. Пазы двух секций сдвинуты на половину полюсного деления магнита ротора. Начало и конец ленты каждой секции подсоединены к коммутаторам, которые управляются сигналами датчика положения ротора. Намотка расположена в зазоре между магнитом ротора и магнитопроводом и монтируется непосредственно на корпусе двигателя, обеспечивая лучший теплоотвод. Технический результат - повышение момента двигателя за счет пропускания по активному элементу больших токов. 7 ил.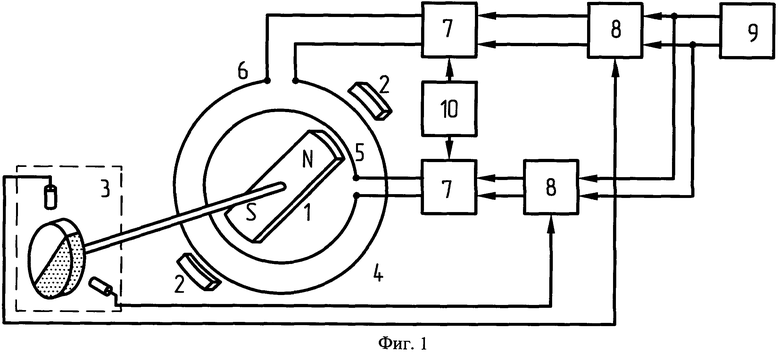
Вентильный двигатель, содержащий ротор, состоящий из постоянного магнита и магнитопровода, разделенных зазором, и датчик положения ротора, отличающийся тем, что в зазоре расположена двухсекционная многовитковая намотка из покрытой изоляцией электропроводящей ленты, при этом обе секции размещены концентрически, а ленты, из которых выполнены обе секции, имеют узкие поперечные вырезы, чередующиеся с одного и другого боковых краев ленты, причем центры двух смежных пазов, расположенных на противоположных торцах секции и получаемых при ее намотке за счет совмещения вырезов, находятся на расстоянии, равном полюсному делению магнита ротора, при этом пазы второй секции сдвинуты на половину полюсного деления магнита ротора относительно аналогичных пазов первой секции, а контакты, связанные с началом и концом ленты каждой секции, подсоединены к выходам переключателей реверса, входы которых связаны с выходами коммутаторов, присоединенных к источнику питания, при этом к управляющим входам коммутаторов подключены выходы датчика положения ротора, а управляющие входы переключателей реверса связаны с блоком задатчика реверса.
| АДВОЛОТКИН Н.П | |||
| и др | |||
| Управляемые бесконтактные двигатели постоянного тока | |||
| - Л.: Энергоатомиздат, 1984, с.142 | |||
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2009 |
|
RU2408127C1 |
| RU 2004119871 A1, 10.01.2006 | |||
| МАГНИТОЭЛЕКТРИЧЕСКИЙ МОМЕНТНЫЙ ДВИГАТЕЛЬ ВОЛЕГОВА В.Е. | 1998 |
|
RU2141159C1 |
| Тиристорный регулятор секционированной нагрузки | 1981 |
|
SU1003270A1 |
| СПОСОБ ИЗМЕРЕНИЯ УРОВНЯ ЖИДКОСТИ | 1994 |
|
RU2083955C1 |
| ЮФЕРОВ Ф.М | |||
| Электрические машины автоматических устройств | |||
| - М.: Высшая школа, 1988, с.200-203, 212-214, 308-311. | |||

