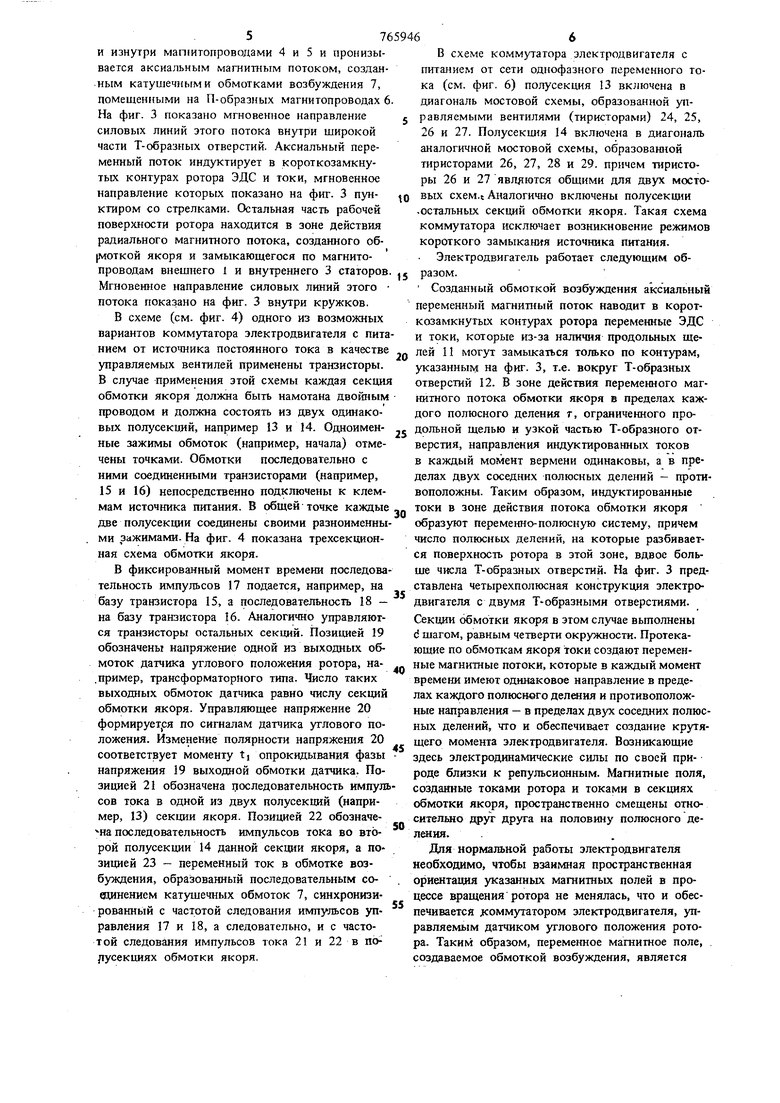
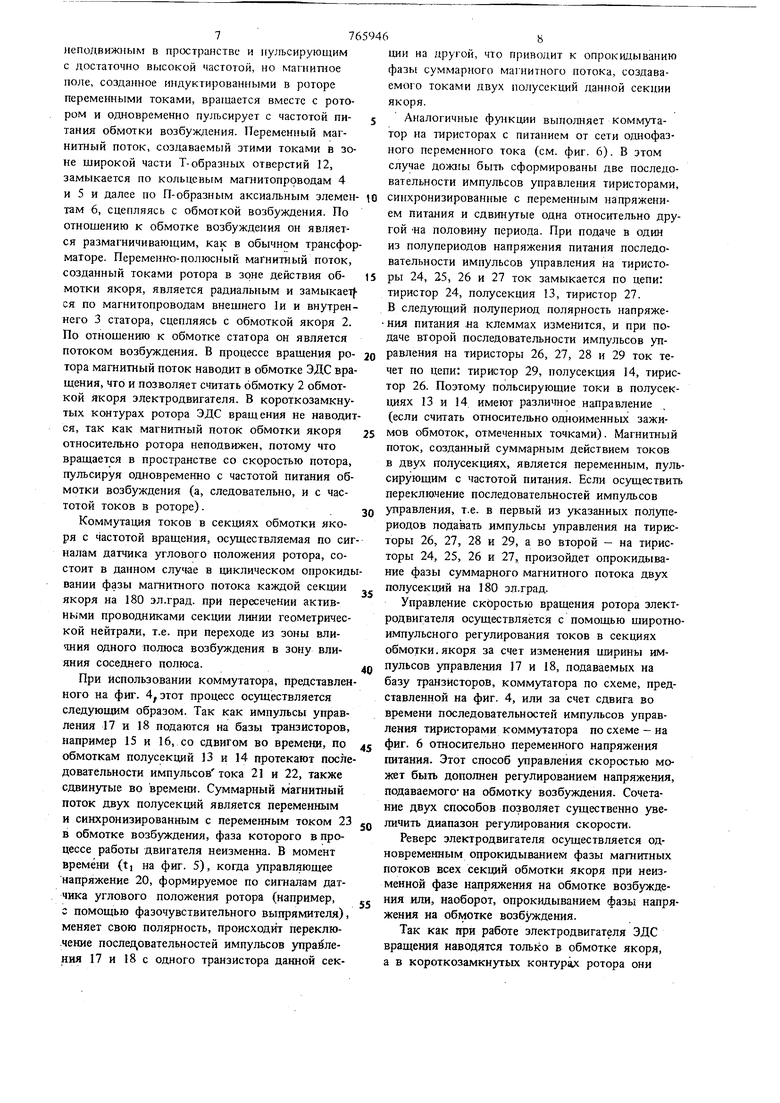
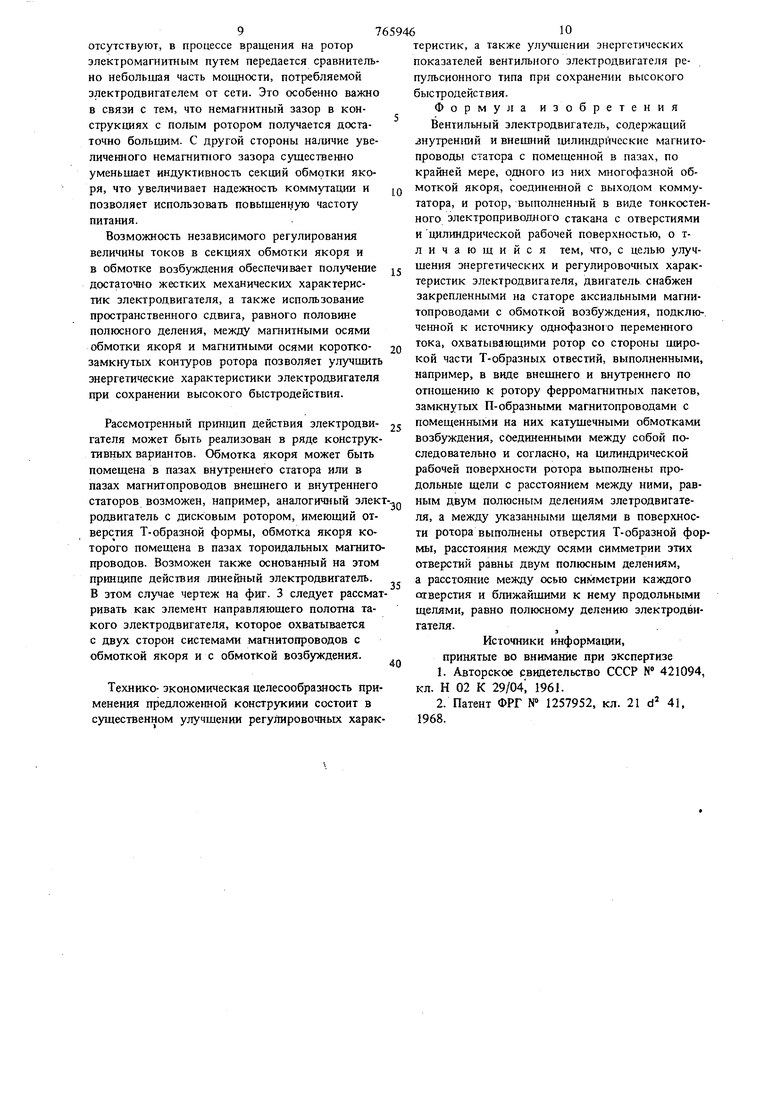
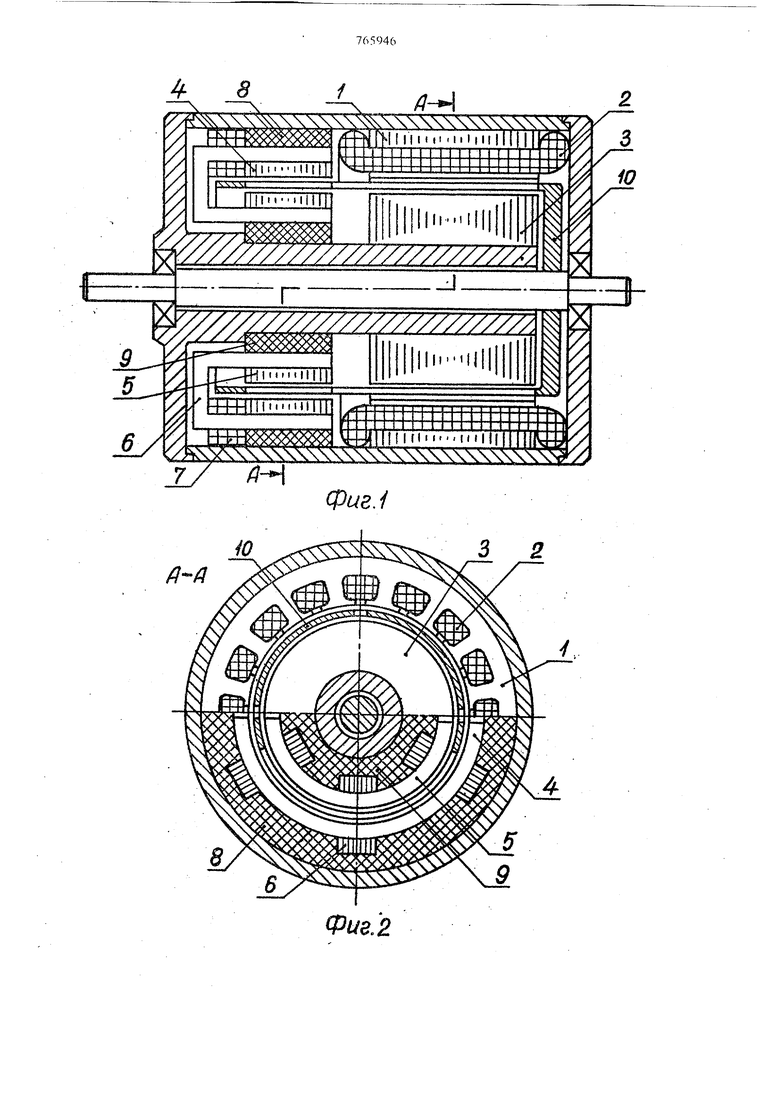
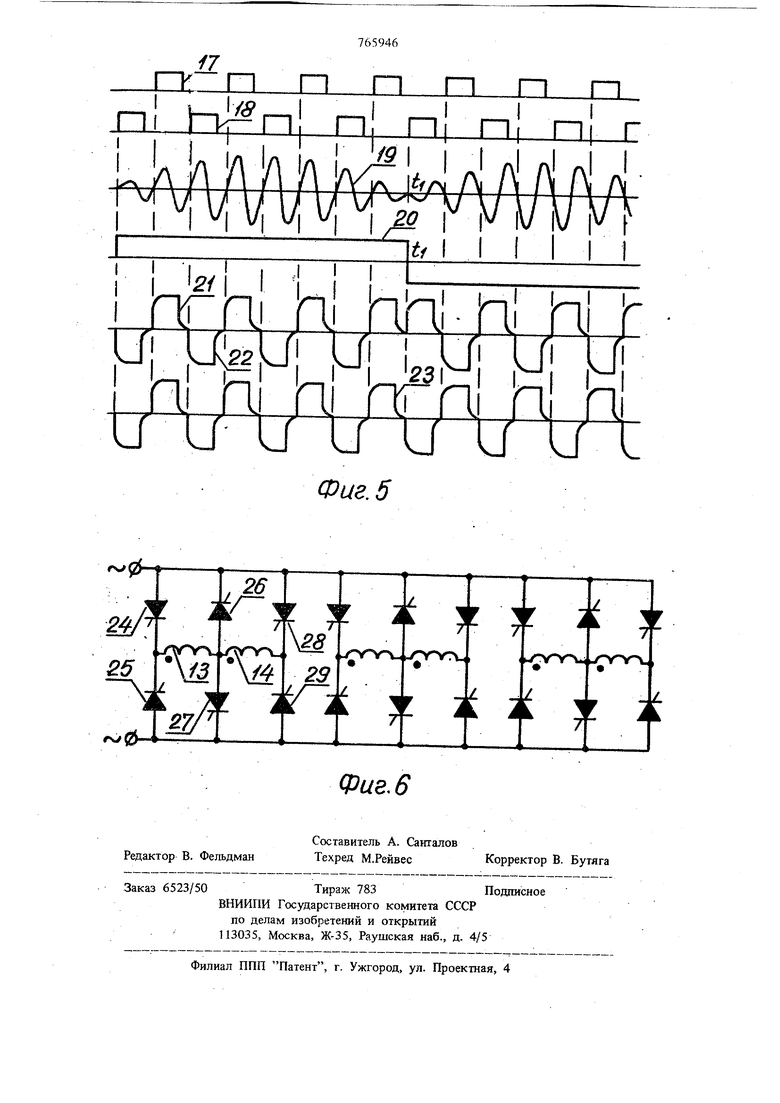
Изобретение относится к области электротехники, к электродвигателям с бесконтактной ком мутацией. Известны вентильные электродвигатели репуль сионного типа, первичная обмотка которых расположена на роторе и питается от источника однофазного переменного тока через кольца и щетки, а вторичная обмотка (обмотка якоря) помещена ,в пазах статора. Токи в обмотке якоря коммутиру отся с помощью управляемых вентилей. . Их недостаток - низкие энергетические показатели и большой момент инерш1и. Известны также конструкции, в которых пер вичной обмоткой, подключённой к однофазному источнику питания, является обмотка якоря, а вторичная короткозамкнутая обмотка расположена на роторе. В частном случае статор такого двигателя может содержать внешний и внутренний магнитопроводы, а короткозамкнутый ротрр может быть выполнен в виде помещенного между ними тонкостенного электропри водного цилиндра с отверстиями, например, прямоугольной формы, вокруг которых замыкаются наведенные полем статора переменные токи. Такая конструкция позволяет обеспечить малый момент инерции ротора и высокое бьютродействие 2. Однако репульсионный электродвигатель, обеспечивая возбу))дение короткозамкнутой обмотки ротора пульсирующим магнитным полем статора, не позволяет (в отличие, например, от двигателя постоянного тока) использовать пространственный сдвиг между магнитными осями обмоток статора и ротора, равный половине полюсного деления, при котором обеспечивается, при прочих равных условиях, максимальное значение электромагнитного момента, что ухудшает его энергетические и весо-габаритные показатели. Механическая характеристика репульсионного электродвигателя имеет гиперболический характер, тогда как для исполнительных двигателей в системе автоматизированиого электропривода чаще 1ре6уется, чтобы она была достаточно жесткой. Реверс репульсионного электродвигателя известных конструкций обеспечивается только за счет пространственного сдвига оси магнитного поля статора относительно оси магнитного поля ротора, что существенно усложняет конструкЕщю датчика углового положения ротора и систему управления. Целью изобретения является улучшение энергетических и регулировочных характеристик электродвигателя репульсионного типа. Это достигается тем, что цилиндрическая рабочая поверхность ротора, вынолненного в виде тонкостенного стакана, разделена продольными щелями с расстоянием между ними, равным двум полюсным делениям электродвигателя, а между указанным щелями в поверх-, нести ротора имеются отверстия Т-образной формы, с расстоянием между осями симметрии этих отверстий, равным двум полюсным делениям, и с расстоянием между осью симметрии отверстия и ближайшими к нему продольными щелями, равными полюсному делению. На статоре, : кроме внешнего и внутреннего магнитопроводов с обмоткой якоря, закреплены аксиальные магнитопроводы с обмоткой возбуждени охватывающие ротор со стороны широкой части Т-образных отверстий, например, в виде внешнего и внутреннего по отношению к ротору фе ромагнитных пакетов, замкнутых П-образными магнитопроводами с помещенными на них катушечными обмотками возбуждения,соединенны ми между собой последовательно и согласно и подключенными к источнику однофазного пере менного тока. Таким образом, предлагаемый электродвигатель по принщ1пу действия близок к репульсио ному, о отличается от него тем, что возбужде ние ротора осуществляется не Магаитным потоком обмотки якоря, а аксиальным потоком, создаваемым независимой обмоткой возбуждения. В результате использования такой конструкции удается получить достаточио Хесткие механические характеристики электродвигателя и улучшить его энергетические показатели. Последнее достигается за счет использования режима работы, при котором оси магнитных полей, созданных обмоткой якоря и токами в короткрзамкнутых контурах ротора, сдвинуты на , равный половине полюсного деления электродвигателя. При этом для реверса достаточно опрокидывания на 480 эл.град;фазы токов в секциях обмотки якоря или опроквдывания фазы тока в обмотке возбуждения. Диапазон регулирования скорости возрастает за счет возможности управления ве.гтичиной тока в обмотке возбуждения в дополнение к управлению токами в секциях обмоткой якоря. Малый момент инерции ротора позволяет создать электродвигатель с высоким быстродействием. На фиг. I представлен предлагаемый электродвигатель, продольны-й разрез; на фиг. 2 разрез А-А на фиг. 1; на фш-. 3 - развертка цилиндрической рабочей поверхности ротора на плоскость с указанием направлении силовых линий магнитных полей обмотки возбуждения и обмотки якоря, а также направлений токов, наведенных магнитным полем обмотки возбуждения в короткозамкнутых контурах ротора; на фиг. 4 - схема коммутатора электродвигателя с питанием от сети постоянного тока; на фиг. 5 - графики электромагнитных процессов электродвигателя как функции времени в случае применения схемы коммутатора на фиг. 4; на фиг. 6 - вариант схемы коммутатора с питанием от сети однофазного пере енного тока. Активная часть статора электродвигателя состоит из цилиндрических магнитопроводов внешнего статора 1 с уложенной в его пазы обмоткой якоря 2 и внутреннего статора З.На статоре закреплены также ферромагнитные цилиндрические пакеты 4 и 5, замкнутые П-образными магнитопроводами 6 с помешенными на них катушечными обмотками возбуждения 7, соединёнными между собой последовательно и согласно и подключенными к источнику однофазного переменного тока. Внутренний и внешний цилиндрические пакеты 4 и 5 ;1олжны иметь хотя бы один поперечный разрез с тем, чтобы кольцевые пластины этих пакетов не могли представлять собой короткозамкнутых контуров, сцепляющихся с аксиальными магнитными потоками П-образных мап{итопроводов 6. Цилиндрические пакеты 4 и 5 (см. фиг. 2) имеют по два поперечных разреза и выполнены таким образом в виде двух полуколец. С этой же целью магнитопроводы 4, 5 и 6 крепятся на статоре с помощью втулок 8 и 9, изготовленных из какого-либо изоляционного материала, например пластмассы. Внутрею яя втулка 9, а также пакет внутреннего статора 3 крепятся на цилиндрическом выступе подшидникового щита. Ротор 10 электродвигателя выполнен в виде тонкостенного электропроводного стакана с цилиндрической рабочей поверхностью, закрепленного на валу, свободно вращающемся внутри цилиндрического выступа. Более подробно конструкция ротора 10 представлена на фиг. 3, где его цилиндрическая рабочая поверхность изображена в развертке на плоскость. Эга поверхность разделена продо.пьными щелями 11с расстоянием между ними, равным 2т, где г - полюсное деление обмотки якоря электродвигателя. Между щелями в поверхности ротора вьшолнены Т-образные отверстия 12, причем расстояние между осями симметрии этих отверстий равно двум полюсным делениям, а расстояние между осью симметрии Т-образного отверстия иближайшими к нему продольными щелями равно полюсному делению. Со стороны широкой части Т-образных отверстий поверхность ротора охватывается снаружи 57659 и изнутри машитопроводами 4 и 5 и пронизывается аксиальным магнитным потоком, созданным кa yuкчнымк обмотками возбуждения 7, помешенными на П-образных магнитопроводах 6. На фиг. 3 показано мгновенное направление силовых линий этого нотока внутри широкой части Т-образных отверстий. Аксиальный переменный поток индуктирует в короткозамкнутых контурах ротора ЭДС и токи, мгновенное направление которых показано на фиг. 3 пунктиром со стрелками. Остальная часть рабочей noBepxjfocTH ротора находится в зоне действия радиального магнитного потока, созданного об(МОТКОЙ якоря и замыкающегося по магнитопроводам внешнего 1 и внутреннего 3 статоров. , Мгновенное направление силовых линий этого потока показано на фиг. 3 внутри кружков. В схеме (см. фиг. 4) одного из возможных вариантов коммутатора электродвигателя с питанием от источника постоянного тока в качестве . управляемых венталей применены транзисторы. В случае применения этой схемы каждая секция обмотки якоря должна быть намотана двойным проводом и должна состоять из двух одинаковых полусекций, например 13 и 14. Одноименные зажимы обмоток (например, начала) отмечены точками. Обмотки последовательно с ними соединенными транзисторами (например, 15 и 16) непосредственно подключены к клеммам источника питания. В общей точке каждые . две полусекции соединены своими разноименными зажималта. На фиг. 4 показана трехсекционная схема обмотки якоря. В фиксированный момент времени последовательность импульсов 17 подается, например, на базу трагоистора 15, а последовательность 18 - на базу транзистора 16. Аналогично управляются транзисторы остальных секций. Позицией 19 обозначены напряжение одной из выходных обмоток датчика углового положения ротора, на.пример, трансформаторного типа. Число таких выходных обмоток датчика равно числу секций обмотки якоря. Управляющее напряжение 20 формирует ся по сигналам датчика углового положения. Изменение полярности напряжения 20 соответствует моменту t, опрокидывания фазы напряжения 19 выходной обмотки датчика. Позицией 21 обозначена последовательность импульсов тока в одной из двух полусекций (например, 13) секции якоря. Позицией 22 обозначе нa последовательность импульсов тока во второй полусекции 14 данной секции якоря, а позицией 23 - переменный ток в обмотке возбуждения, образованный последовательным со- . единением катушечных обмоток 7, синхронизированньж с частотой следования импульсов управления 17 и 18, а следовательно, и с частотой следования импульсов тока 21 и 22 в /1усекциях обмотки якоря. 66 В схеме коммутатора электродвигателя с питанием от сети однофазного переменного тока (см. фиг. 6) полусекция 13 включена в диагональ мостовой схемы, образованной управляемыми вентилями (тиристорами) 24, 25, 26 и 27. 1Толусекш{я 14 включена в диагональ аналогичной мостовой схемы, образовашюй тиристорами 26, 27, 28 и 29. причем тиристоры 26 и 27 явлдются общими для двух мостовых схем.е Аналогично включены полусекщ И .остальных секций обмотки якоря. Такая схема коммутатора исключает возникновение режимов короткого замыкания источника питания. . Электродвигатель работает следующим образом. Созданный обмоткой возбуждения аксиальный переменный магнип ый поток наводит в короткозамкнутых контурах ротора переменные ЭДС и токи, которые из-за наличия продольных щелей 11 могут замыкаться только по контурам, указанным на фиг. 3, т.е. вокруг Т-образных отверстий 12. В зоне действия переменного магнитного потока обмотки якоря в пределах каждого полюсного деления г, ограниченного продольной щелью и узкой частью Т-образного отверстия, направления индуктированных токов в каждый момент вермени одинаковы, а в пределах двух соседних полюсных делений - противоположны. Таким образом, индуктированные токи в зоне действия потока обмотки якоря образуют переменно-полюсную систему, причем число полюсных делений, на которые разбивается поверхность ротора в этой зоне, вдвое больше чжла Т-образных отверстий. На фиг. 3 представлена четырехполюсная конструкция электродвигателя с двумя Ъобразными отверстиями, Секции обмотки якоря в этом случае выполнены d щагом, равным четверти окружности. Протекающие по обмотеам якоря токи создают переменные магнитные потоки, которые в каждый момент времени имеют одинаковое направление в пределах каждого полюсного делшия и противоположные направления - в пределах двух соседних полюсных делений, что и обеспечивает создание крутящего момента электродвигателя. Возникающие здесь электродинамические силы по своей природе близки к репульсионным. Магнитные поля, созданные токами ротора и токами в секциях обмотки якоря, пространственно смещены относительно друг друга на половину полюсного деления. Для нормальной работы электродвигателя необходимо, чтобы взаимная пространственная ориентация указанных магнитных полей в процессе вращения ротора не менялась, что и обеспечивается коммутатором электродвигателя, управляемым датчиком углового положения ротора. Таким образом, переменное магнитное поле, . создаваемое обмоткой возбуждения, является 776 неподвижным в пространстве и пульсирующим с nocTaTOMFio высокой частотой, но магнитаое поле, созданное индуктированными в роторе переменными токами, вращается вместе с ротором и одновременно пульсирует с частотой питания обмотки возбуждения. Переменный магнитный поток, создаваемый этими токами в зоне широкой части Т-образных отверстий 12, замыкается по кольцевым магнитопроводам 4 и 5 и далее по П-образным аксиальным элементам 6, сцепляясь с обмоткой возбуждения. По отношению к обмотке возбуждения он является размагничивающим, как в обычном трансфор маторе. Переменн«-полюсный магнитный поток, созданный токами ротора в зоне действия обмотки якоря, является радиальным и замыкает ся по матнитопроводам внешнего и и внутреннего 3 статора, сцепляясь с обмоткой якоря 2. По отношению к обмотке статора он является потоком возбуждения. В процессе вращения ротора магнитный поток наводит в обмотке ЭДС вращения, что и позволяет считать обмотку 2 обмоткой якоря электродвигателя. В короткозамкнутых контурах ротора ЭДС вращения не наводит ся, так как магнитный поток обмотки якоря относительно ротора неподвижен, потому что вращается в пространстве со скоростью потора, пульсируя одновременно с частотой питания обмотки возбуждения (а, следовательно, и с частотой токов в роторе). Коммутация токов в секциях обмотки якоря с частотой вращения, осуществляемая по сиг налам датчика углового положения ротора, состоит в данном случае в циклическом опрокиды вании фазы магнитного потока каждой секции якоря на 180 эл.град. при пересечении активными проводниками секции линии геометрической нейтрали, т.е. при переходе из зоны вличния одного полюса возбуждения в зону влияния соседнего полюса. При использовании коммутатора, представлен ного на фиг. 4, этот процесс осуществляется следующим образом. Так как импульсы управления 17 и 18 подаются на базы транзисторов, например 15 и 16, со сдвигом во времени, по обмоткам полусекдий 13 и 14 протекают после довательности импульсов тока 21 и 22, также сдвинутые во времени. Суммарный магнитный поток двух полусекций является переменным и синхронизированным с переме1шым током 23 в обмотке возбуждения, фаза которого в процессе работы двигателя неизменна. В момент времени (tj на фиг. 5), когда управляющее напряжение 20, формируемое по сигналам датчика углового положения ротора (например, с помощью фазочувствительного выпрямителя) меняет свою полярность, происходит переклю.чение послед,овательн остей импульсов управления 17 и 18 с одного транзистора данной секции на другой, что приводит к опрокидыванию фазы суммарного магнитного потока, создаваемого токами двух полусекций данной секции якоря. Аналогичные функции выполняет коммутатор на тиристорах с питанием от сети однофазного переменного тока (см. фиг. 6). В этом случае дожны быть сформированы две последовательности импульсов управле1шя тиристорами, синхронизированные с переменным напряжением питания и сдвинутые одна относительно другой па половину периода. При подаче в один из полупериодов напряжения питания последовательности импульсов управления на тиристоры 24, 25, 26 и 27 ток замыкается по цепи: тиристор 24, полусекция 13, тиристор 27. В следующий полупериод полярность напряжения питания на клеммах изменится, и при подаче второй последовательности импульсов управления на тиристоры 26, 27, 28 и 29 ток течет по цепи: тиристор 29, полусекция 14, тиристор 26. Поэтому польсирующие токи в полусекциях 13 и 14 имеют различное направление (если считать относите.пьно одноименных зажимов обмоток, отмеченных точками). Магнитный поток, созданный суммарным действием токов в двух полусекциях, является переменным, пульсирующим с частотой питания. Если осуществить переключение последовательностей импульсов управления, т.е. в первый из указанных поЛупериодов подавать импульсы управления на тиристоры 26, 27, 28 и 29, а во второй - на тиристоры 24, 25, 26 и 27, произойдет опрокидывание фазы суммарного магнитного потока двух полусекций на 180 эл.град. Управление скоростью вращения ротора электродвигателя осуществляется с помощью широтноимпульсного регулирования токов в секциях обмотки. якоря за счет изменения цшрины импульсов управления 17 и 18, подаваемых на базу транзисторов, коммутатора по схеме, представленной на фиг. 4, или за счет сдвига во времени последовательностей импульсов управления тиристорами коммутатора по схеме - на фиг. 6 относительно переменного напряжения гштания. Этот способ управления скоростью может быть дополнен регулированием напряжения, подаваемого на обмотку возбуждения. Сочетание двух способов позволяет существенно увеличить диапазон регулирования скорости. Реверс электродвигателя осуществляется одновременным опрокидыванием фазы магнитных потоков всех секций обмотки якоря при неизменной фазе напряжения иа обмотке возбуждения или, наоборот, опрокидыванием фазы напряжения на обмотке возбуждения. Так как яри работе электродвигателя ЭДС вращения изводятся только в обмотке якоря, а в короткозамкнутых контурах ротора они отсутствуют, в процессе вращения на ротор электромапштным путем передается сравнительно небольшая часть мощности, потребляемой электродвигателем от сети. Это особенно важно в связи с тем, что немагнитный зазор в конструкциях с полым ротором получается достаточно большим. С другой стороны наличие увеличенного немагнилюго зазора существенно уменьшает индуктивность секций обмотки якоря, что увеличивает надежность коммзтащш и позволяет использовать повыщенную частоту питания. Возможность независимого регулирования величины токов в секциях обмотки якоря и в обмотке возбуждения обеспечивает получение достаточно жестких механических характеристик электродвигателя, а также использование пространственного сдвига, равного половине полюсного деления, между магаитными осями обмотки якоря и магнитными осями короткозамк1Гутых контуров ротора позволяет улучшить энергетические характеристики электродвигателя при сохранении высокого быстродействия. Рассмотренный принцип действия электродвигателя может быть реализован в ряде конструк тивных вариантов. Обмотка якоря может быть помещена в пазах внутреннего статора или в пазах магнитопроводов внешнего и внутреннего статоров возможен, например, аналогичный элек родвигатель с дисковым ротором, имеющий отверс тия Т-образной формы, обмотка якоря которого помещена в пазах тороидальных магнито проводов. Возможен также основанный на этом принципе действия линейный электродвигатель. В этом случае чертеж на фиг. 3 следует рассмат ривать как элемент направляющего полотна такого электродвигателя, которое охватывается с двух сторон системами магнитопроводов с обмоткой якоря и с обмоткой возбуждения. Технике- экономическая целесообразность при менения иредложе1шой конструкиии состоит в существенном улучшении регулировочных харак теристик, а также улучшении энергетических показателей вентильного электродвигателя репульсионного типа при сохранении высокого быстродействия. Формула изобретения Вентильный электродвигатель, содержащий .знутрен1тй и внешний 1щлиндрйческие магнитопроводь статора с помешенной в пазах, по крайней мере, одного из них многофазной обмоткой якоря, соединенной с выходом коммутатора, и ротор, выполненный в виде тонкостенного электроприволного стакана с отверстиями и цилиндрической рабочей поверхностью, о тличающийся тем, что, с целью улучшения энергетических и регулировочных характеристик электродвигателя, двигатель снабжен закрепленными на статоре аксиальными магнитопроводами с обмоткой возбуждения, подклю-. ченной к источнику однофазного переменного тока, охватывающими ротор со стороны широкой части Т-образных отвестий, выполненными, например, в виде внешнего и внутреннего по отношению к ротору ферромагнитных пакетов, замкнутых П-образными магнитопров одами с помещенными на них катушечными обмотками возбуждения, соединенными между собой последовательно и согласно, на цилиндрической рабочей поверхности ротора выполнены продольные щели с расстоянием между ними, равным двум полюсным делениям элетродвигателя, а между указанными щелями в поверхности ротора выполнены отверстия Т-образной формы, расстояния между осями симметрии этих отверстий равны двум полюсным делениям, а расстояние между осью симметрии каждого отверстия и ближайшими к нему продольными щелями, равно полюсному делению электродвигателя. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 421094, кл. Н 02 К 29/04, 1961. 2.Патент ФРГ N 1257952, кл. 21 d 41, 1968.
./
ю
й-fi
Фие.2 fein:± r i X X X X X X X X X X X X X X ©I© П / ®|(E I ; ч :;--/ X X X X © I© 1© т ©I© j© I ©I©
| название | год | авторы | номер документа |
|---|---|---|---|
| Репульсионный вентильный электродвигатель | 1977 |
|
SU666619A1 |
| Линейный электродвигатель | 1977 |
|
SU736286A1 |
| Линейный электродвигатель | 1977 |
|
SU693514A1 |
| Линейный электродвигатель | 1976 |
|
SU655038A1 |
| Вентильный электродвигатель | 1974 |
|
SU561257A1 |
| Вентильный электродвигатель | 1978 |
|
SU758416A1 |
| Однофазный вентильный электродвигатель | 1976 |
|
SU657536A1 |
| РЕПУЛЬСИОННЫЙ ВЕНТИЛЬНЫЙ РЕВЕРСИВНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2000 |
|
RU2187190C2 |
| Вентильный электродвигатель | 1973 |
|
SU518843A2 |
| Вентильный электродвигатель | 1972 |
|
SU445104A1 |
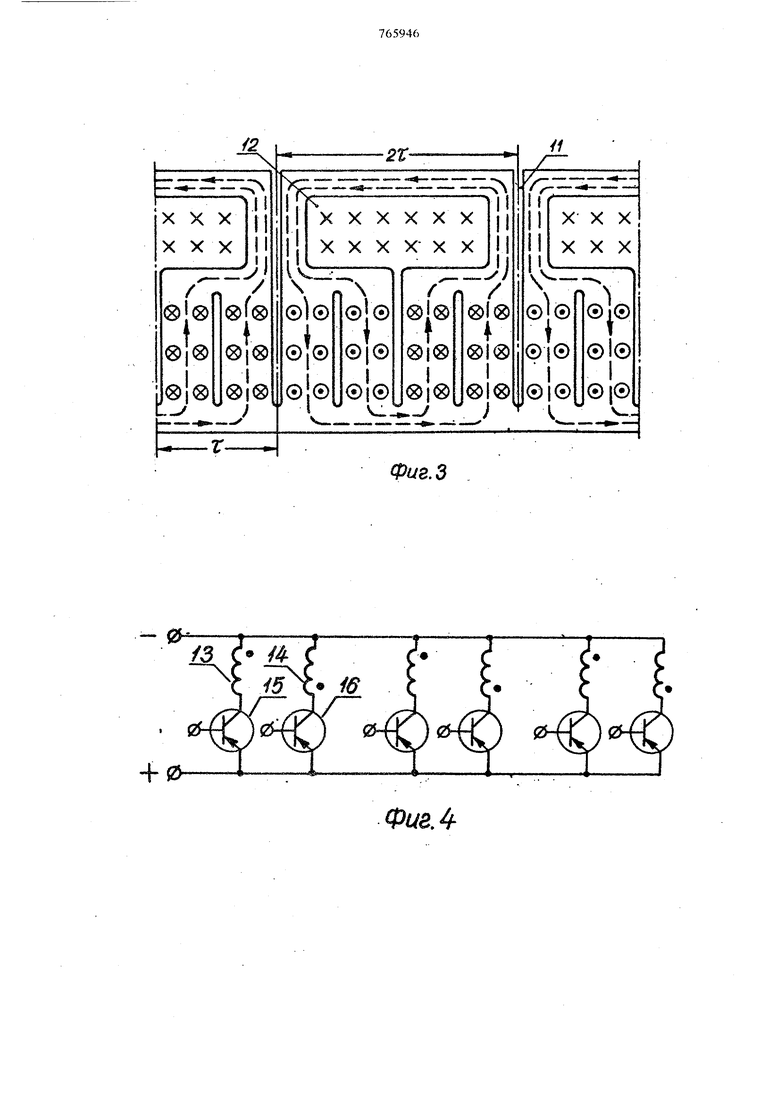
Фив.З
ФцвЛ /7 п гп n i rrni п и LfeLJT О гп гп nni-ni ni г LLT LT U
