Изобретение относится к медицине, а именно к реабилитации, и может быть использовано при восстановлении двигательной функции верхней конечности и обучению моторным навыкам.
Известен способ коррекции мелкой моторики с использованием сенсорных перчаток описанный в патенте №2494670 с приоритетом от 12.12.2011 г. включающий помещение кисти руки больного в устройство, подключение устройства к компьютеру, загрузку и запуск программы компьютерной игры, и выполнение активных движений на сгибание-разгибание, отличающийся тем, что руку пациента размещают и фиксируют в устройстве в виде сенсорной перчатки; располагают и фиксируют относительно устройства чувствительные и токопроводящие элементы; при этом сенсорную перчатку используют в качестве манипулятора таким образом, что пациент выполняет активные движения сгибания-разгибания кисти и пальцев, обеспечивая этим соответствующие заданные движения объекта.
Но данный способ предназначен только для организации биологической обратной связи на основе визуального анализатора. Сенсорные перчатки не обеспечивают ощущения контакта с объектами виртуальной реальности, а так же не позволяют ощущать температуру, форму, вес и упругость предметов виртуальной реальности.
Самым близким по своей технической сущности является устройство и способ имитации и передачи контактных экстероцептивных ощущений, описанные в патенте № 2708949 с приоритетом от 26.07.2017 г. включающее в себя перчатку, выполненную из эластичного материала, стимуляторы механических, динамических и термические эффектов, закрепленные в областях перчатки, контактирующих с пальцами и ладонью руки в зонах расположения механорецепторов Мейснера, Пачини, Руффини, Краузе и аксонов клеток Меркеля, блок управления и коммуникации, связанный с указанными стимуляторами и осуществляющий коммуникацию с управляющим программным обеспечением компьютера или смартфона, блок питания. Устройство в форме перчатки для имитации контактных экстероцептивных ощущений на кожные покровы, в данном случае на пальцы и ладонь руки, посредством распложенных в нем стимуляторов, которые синхронизированы межу собой и передают механические, динамические и термические эффекты, а именно эффекты вибрации, сжатия, расширения, смещения, давления, нагревания и охлаждения, как дополнение к визуализации объекта, события или передаваемых ощущений для создания максимально перцептивного образа. Дополнительно содержит тактильные стимуляторы, использующиеся для формирования тактильных ощущений, расположенные на кончиках пальцев руки и на ладони. Дополнительно содержит вибрационные стимуляторы, использующиеся для имитирования ощущений вибрации, расположенные на внутренней стороне фаланг пальцев, а так же на внутренней стороне кисти руки. Дополнительно содержит термические стимуляторы, использующиеся для имитирования температурных ощущений, расположенные на внутренней и на внутренней стороне кисти руки, содержит фиксирующий элемент на запястье руки. Передаваемые ощущения формируются путем последовательного или одновременного воздействия на рецепторы пальцев и ладони руки, посредством стимуляторов, управляемых с помощью программного обеспечения, установленного на компьютер или смартфон, соединенный с указанным устройством, проводным или беспроводным способом, через блок управления и коммуникации указанного устройства.
Но данное устройство не позволяет формировать сложные виды чувствительности в виде ощущение формы, массы и упругости предмета, предназначено передавать только ощущения, связанные с прикосновением к виртуальному объекту.
Техническим результатом заявленного устройства является расширение арсенала технических средств позволяющих формировать сложные виды чувствительности в виртуальной среде и обеспечивающих обучение моторным навыкам и проведению двигательной реабилитации пациентов с поражением верхней конечности с учетом индивидуальных особенностей двигательных и сенсорных нарушений.
Заявленный технический результат достигается за счет того, что устройство формирования общей чувствительности в виртуальной среде состоит из блока управления, коммуникаций связанных с указанным устройством и осуществляющий коммуникацию с управляющим программным обеспечением компьютера или смартфона, очков виртуальной реальности и перчатки оснащенной вибрационными, нагревательными и электромеханическими элементами используемыми для стимуляции рецепторов и имитации контактных экстероцептивных ощущений, элементы расположены в проекции каждой из трех фаланг всех пальцев причем, электромеханические вибрационные элементы функционируют когерентно с частотой от 8 до 300 Гц с шагом изменения 5% коррелируя с интенсивностью сжатия предмета необходимой для перемещения виртуальных объектов с различной условной массой, а тензодатчики располагаемые по пятнадцать на ладонной и тыльной поверхности кисти в проекции суставов фаланг кисти и лучезапястного сустава обеспечивают регистрацию кинематики кисти основанной на 22 степенях свободы и регистрируют изменения радиуса жеста в том или ином суставе кисти от 5 мм, кроме того содержит устройство регистрации электроэнцефалограммы обеспечивающее регистрацию изменения мощности и длительность частот электроэнцефалограммы в сенсомоторной области и оптический трекер обеспечивающий сопоставление расположения верхней конечности в физическом мире и в виртуальной реальности и обеспечивающий оценку движения верхней конечности в плечевом, локтевом и лучезапястном суставах. Устройство регистрации электроэнцефалограммы представляет собой шестиканальный электроэнцефалографический аппарат с датчиками, располагаемыми в отведениях С3, С4, О1, О2, согласно системе «10-20», референтный электрод располагается в отведении Cz (точка пересечения сагиттальной и фронтальной плоскостей в теменной области), заземляющий электрод располагается в точке М1 (область сосцевидного отростка). Данное устройство предназначено для регистрации десинхронизации в сенсомоторного ритма (повышение амплитуды бетта-ритма (19-35 Гц) более чем на 30% от исходного значения и снижение амплитуды альфа-ритма (8-12 Гц), более чем на 30% от исходного уровня. Данные изменения регистрируются в отведениях С3 и С4, длительность данных изменений для начала его функционирования в качестве управляющего сигнала для визуализации движения руки в виртуальной среде должна быть не менее 5 секунд. Отведения О1 и О2 предназначены для регистрации зрительного вызванного потенциала в латентности от 150 до 300 мс, возникающего при сосредоточении внимания на объекте виртуальной реальности, с которым планирует взаимодействовать пользователь или реабилитируемый. Оптический трекер располагается таким образом, что в зоне его действия находиться пользователь или реабилитируемый, а именно его верхние конечности. Данное устройство выполняет роль оценки движения верхней конечности в плечевом, локтевом и лучезапястном суставах, при этом выполняя функцию сопоставления расположения верхней конечности в физическом мире, передавая информацию в программное обеспечение, осуществляющее формирование виртуальной реальности, для корректного отображения движения виртуальной конечности в плечевом, локтевом и лучезапястном суставах, демонстрируемой пользователю посредством очков виртуальной реальности. Минимальными условиями функционирования оптического трекера является изменение радиуса жеста от 5 мм. Еще одним компонентом являются тензодатчики, в количестве 30, располагаемых по 15 с ладонной и тыльной поверхности кисти, в проекции суставов фаланг кисти, а также лучезапястного сустава, обеспечивая регистрацию кинематики кисти основанной на 22 степенях свободы, регистрирующие изменении радиуса жеста, в том или ином суставе кисти, от 5 мм. Количество датчиков фиксирующих изменение радиуса движения в суставах фаланг обусловлено использование упрощенной кинематической модели руки, включающей в себя 22 степени свободы. Информация от данных датчиков поступает в программное обеспечение, осуществляющее формирование виртуальной реальности, для корректного отображения движения виртуальной кисти. В перчатку надеваемую на кисть реабилитируемого интегрированы три вида устройств посредством которых осуществляется сенсорное воздействие на ладонную поверхность кисти пользователя для обеспечения эктероцептивной, проприоцептивной и сложной чувствительности, обеспечивающего сенсорные ощущения контакта с виртуальными объектами, максимально идентичными ощущениям, возникающим при контакте с физическими объектами. Тактильные чувствительные ощущения достигаются за счет расположения электромеханических устройств в проекции каждой из трех фаланг всех пальцев, в количестве 15. Данные электромеханические устройства функционируют и создают ощущения прикосновения к кожной поверхности ладонной поверхности при их включении, за счет подвижной части устройства, являющегося результатом электромеханического преобразования. Данное устройство активизируется в результате совмещения координат виртуального объекта и координат кисти пользователя, вычисляемых посредством функционирования программного обеспечения на основе кинематической модели руки. Данные электромеханические устройства активизируются в соответствии с формой виртуального объекта. Для создания тактильных ощущений данный датчик обеспечивает воздействие прикосновения идентичному давлению оказываемым монофиламентом весом 50 г., длительностью 2,24 с., для предотвращения сенсибилизации, длительностью 0,5-0,8 с. Данные датчики включаются и выключаются в течение всего времени контакта с виртуальным объектом. Проприоцептивный ощущения, а именно чувство массы объекта и чувство вибрации, реализуются за счет воздействия вибрационных устройств. Данные устройства размещаются в том же количестве и расположении, что и электромеханические устройства, описанные выше. Данные устройства функционируют когерентно с частотой от 8 до 300 Гц с шагом изменения 5%, коррелируя с интенсивностью сжатия предмета, необходимой для перемещения виртуальных объектов с различной условной массой. Длительность включения данных устройств до 2 сек, с перерывом в 1 сек, для уменьшения выраженности сенсорной сенсибилизации рецепторов, обеспечивающих вибрационную чувствительность. Сочетания тактильного и вибрационного воздействия дают формирование сложных форм чувствительности, а именно: ощущения стереогноза, трехмерного ощущения формы виртуального объекта. Третьим типом интегрированного в перчатку устройством являются электрические нагреватели в проекции дистальных или средних фаланг пальцев, в общем количестве 5 элементов. Данные нагревательные элементы активируются с предметом виртуальной реальности, обозначенным как горячий. Нагревательные элементы повышают температуру до 43°, длительностью 0,5-0,8 сек, с интервалами между повышением температуры 2 сек, для предупреждения адаптации температурных рецепторов TRPV1 (англ. Receptor potential cation channel subfamily V member 1). Персональный компьютер с установленным ПО, позволяет интегрировать информацию, полученную от датчиков, и производит формирование управляемой на основе поступившей информации виртуальной реальности. В задачу функционирования данного блока входит построение виртуальной среды, а также объектов виртуальной реальности, с которыми происходит взаимодействие. Программное обеспечение также изменяет освещенность демонстрируемых объектов виртуальной реальности, с которыми проводиться взаимодействие реабилитируемого для реализации возможности получения зрительного вызванного потенциала на стимул (которым является изменение освещенности объектов).
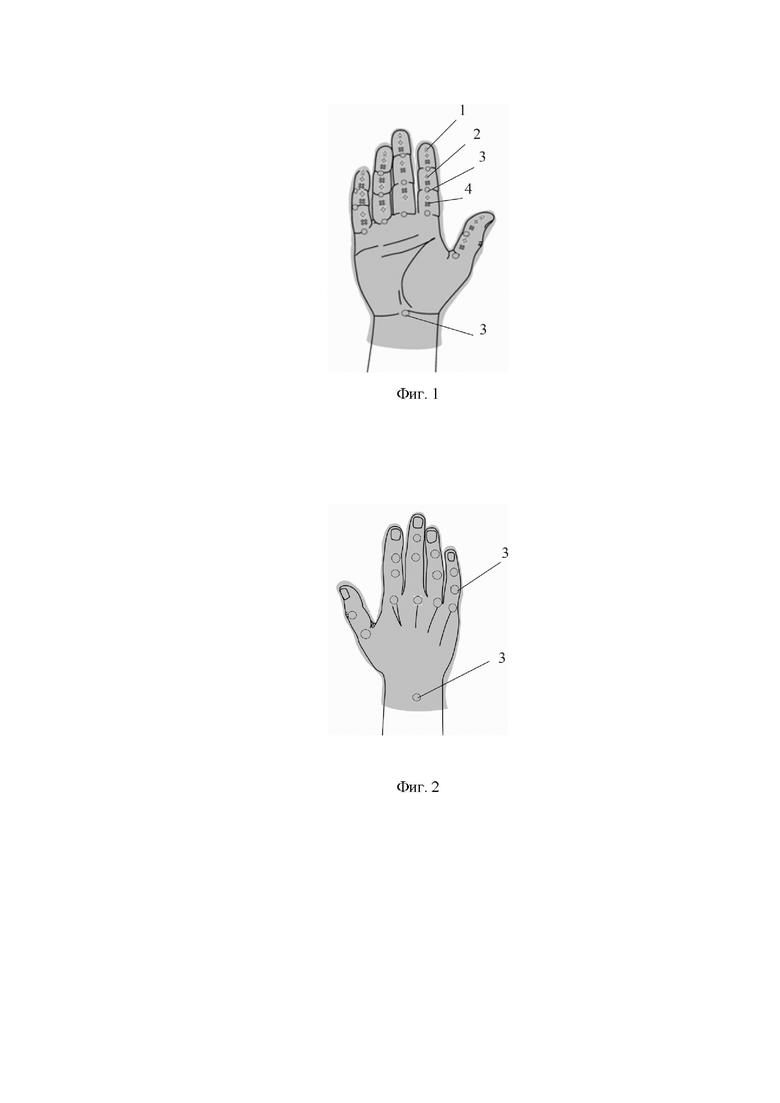
Суть технического решения поясняется чертежами, где на фигуре 1 изображена ладонь,
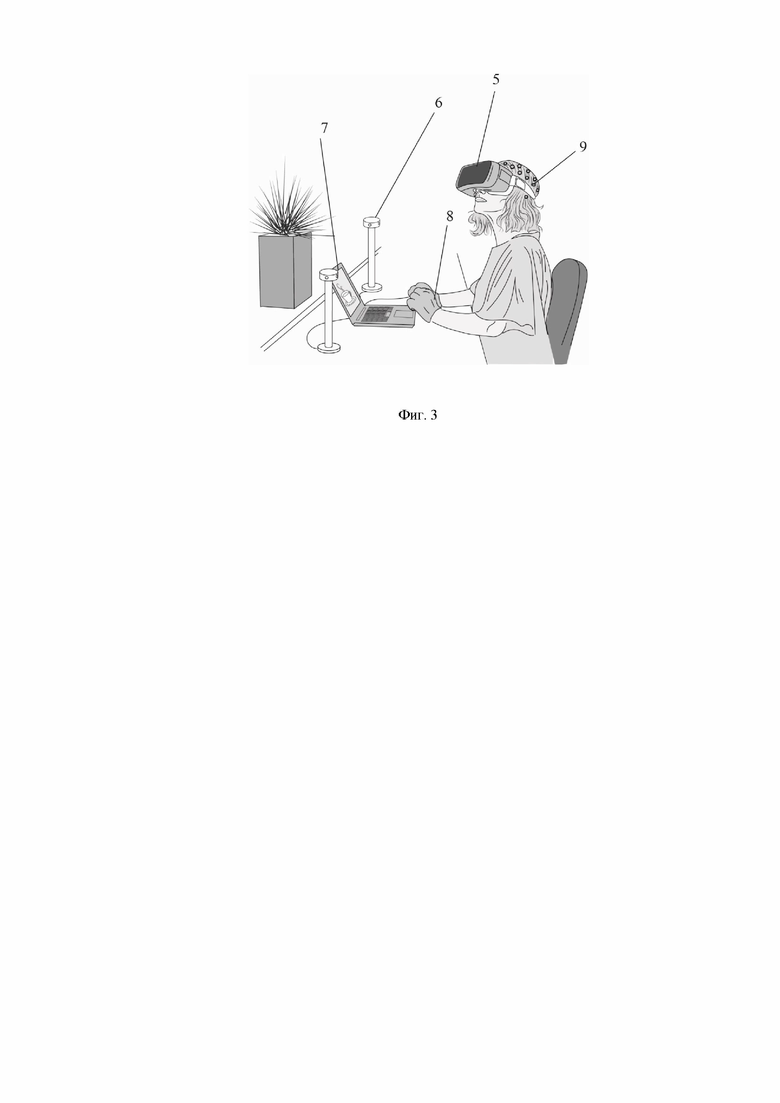
электромеханические элементы 1, вибрационные элементы 2, тензодатчики 3, нагревательные элементы 4, на фигуре 2 изображена тыльная часть ладони, тензодатчики 3, на фигуре 3 изображен процесс реабилитации с использованием устройства формирования общей чувствительности в виртуальной среде, очки виртуальной реальности 5, трекер 6, персональный компьютер 7, перчатка 8, устройство регистрации электроэнцефалограммы 9.
Устройство формирования общей чувствительности в виртуальной среде функционирует следующим образом. На пациента устанавливается электроэнцефалографические электроды 9 в проекции отведений С3, С4, О1, О2, согласно системе «10-20», референтный электрод располагается в отведении Cz (располагающийся в пересечении сагиттальной и фронтальной плоскостей в теменной области), заземляющий электрод располагается в точке М1 (область в проекции левого сосцевидного отростка). Также на пациента устанавливаются очки виртуальной реальности 5, посредством которых проводится демонстрация виртуального мира с объектами, взаимодействие с которыми лежат в основе реабилитации. Напротив пациента, сидящим за столом или находящимся в положении лежа устанавливается оптический трекер 6 движений осуществляемых в плечевом, локтевом и лучезапястных суставах. На руку пациента, с двигательными нарушениями надевается перчатка 8, оснащенной электромеханическими элементами 1, вибрационными элементами 2, тензодатчиками 3 и нагревательными элементами 4, посредством которой проводиться регистрация моторики кисти и осуществляться передача сенсорных ощущений. Пациенту дается инструкция при выполнении реабилитационного задания, например, взять расположенные перед ним виртуальные объекты, которые демонстрируются посредством установленным на его голове очков виртуальной реальности 5. Данные предметы соответствуют физическим предметам с разной жесткостью и весом. Среда виртуальной реальности при демонстрации данных объектов помимо их визуализации обеспечивает возможность изменения их освещенности с частотой 0,5 Гц. При выполнении намерения взять тот или иной предмет с различной плотностью или весом реабилитируемый сосредотачивает на нем свое внимание. При этом по данным электроэнцефалографии происходит регистрация вызванного потенциала, связанного с событием (в качестве которого выступает подсветка виртуального предмета действия). Электроэнцефалографический сигнал передается на персональный компьютер 7, где производиться сегментация 5 секундной записи с последующим ее усреднением и получение вызванного потенциала связанного с событием. Данный потенциал возникает при концентрации на виртуальном объекте, с которым планируется провести взаимодействие. Выбор виртуального объекта на основе регистрации вызванного потенциала связанного с событием являясь стимулом для начала визуализации движения если реабилитируется пациент с отсутствием движения в верхней конечности. В последующем по мере восстановления двигательной функции управляющий сигнал для визуализации получается за счет регистрации с помощью шестиканального электроэнйефалографа, проводящий регистрацию электрической активности головного мозга посредством электродов установленных согласно системе «10-20» в С3, С4. Референтный электрод располагается в отведении Cz (пересечение фронтальной и сагиттальной плоскостей в теменной области), заземляющий электрод располагается в точке М1. С активных электродов расположенных в С3 и С4 отведениях фиксируется десинхронизации сенсомоторного ритма (повышение амплитуды бетта-ритма (19-35 Гц) более чем на 30% от исходного значения и снижение амплитуды альфа-ритма (8-12 Гц), более чем на 30% от исходного уровня. Данные изменения регистрируются в отведениях С3 и С4, длительность данных изменений для начала реализации управления визуализации верхней конечности в виртуальной реальности должна быть не менее 5 секунд. На перчатке 8 установлены тензодатчики 3 в количестве 30, располагаемые с ладонной и тыльной поверхности кисти по 15 датчиков с каждой поверхности, обеспечивая регистрацию кинематики кисти основанной по 22 степеней свободы, регистрирующие изменении радиуса жеста, в том или ином суставе кисти, от 5 мм. Вторым типом датчиков располагаемых в проекции дистальной, средней и проксимальной фаланг каждого пальца являются электромеханические устройства 1, обеспечивающие тактильные чувствительные ощущения. Радом с данными электромеханическими устройствами 1 располагаются вибрационные элементы 2 и электронагревательные элементы 4 в таком же количестве что и электромеханические устройства 1 для формирования вибрационных и температурных ощущений. Процесс формирования ощущения плотности и температуры виртуального объекта происходит следующим образом (есть два варианта функционирования устройства: при отсутствии движений кисти и при наличии сохранных движений минимального объема).
1. При отсутствии движения в верхней конечности:
Реабилитируемый посредством очков виртуальной реальности 5 смотрит на объекты расположенные перед ним на виртуальном столе (данными объектами может выступать кружка с горячим чаем, стакан с водой, эластичный резиновый шар). Данные объекты меняют свою освещенность с частотой 0,3-0,5 Гц. В результате при сосредоточении реабилитируемого на виртуальном объекте, который он планирует взять по данным электроэнцефалографии, регистрируемой в отведениях О1 и О2 по системе «10-20» регистрируется зрительный вызванный потенциал связанный с событием (в качестве которой выступает подсветка). Длительность регистрации электроэнцефалограммы для получения данного вызванного потенциала составляет 5 секунд., он определяется в латентности от 150 до 300 мс от момента подачи сигнала. При получении вызванного потенциала, направляется управляющий сигнал в персональный компьютер 7 с предустановленной программой позволяющей визуализировать виртуальную среду и верхние конечности реабилитируемого.
2. При наличии минимальных движений управляющий сигнал формируется за счет регистрации изменения мощности сенсомоторного ритма в проекции сенсомоторной коры головного мозга, регистрируемого с помощью электродов С3 и С4, при этом управляющий сигнал регистрируется с противоположного полушария относительно пораженной конечности (т.е. при наличии пареза в левой кисти, управляющий сигнал регистрируется с С4, при реабилитации правой руки управляющий сигнал регистрируется с С3). Это связано с тем, что дистальные отделы верхней конечности преимущественно представлены двигательными центрами, расположенными в противоположном полушарии, а проксимальные в ипсилатеральном (т.е. той же стороны). Параметры данной десинхронизации следующие: повышение амплитуды бетта-ритма (19-35 Гц) более чем на 30% от исходного значения и снижение амплитуды альфа-ритма (8-12 Гц), более чем на 30% от исходного уровня. Оптический трекер 6 в данной ситуации отслеживает движение руки в плечевом, локтевом и лучезапястном суставах, для визуализации движения руки в проксимальных отделах и визуализации их до полного объема при такой необходимости, например при парезе верхней конечности. В дальнейшем реабилитация проводится по единому пути, с помощью идентичного устройства, а именно перчатки 8 с установленной на ее ладонной и тыльной поверхностях датчиках и устройств обеспечивающих сенсорное восприятие плотности и температуры предметов виртуальной реальности. В момент совершения движения сопровождающееся контактом с виртуальным объектом датчики контролирующие степень сгибания (с ладонной поверхности) и разгибания (с тыльной поверхности) кисти предназначены для тонкой оценки моторики кисти, с учетом кинематической модели основанной на 22 степенях свободы, описывающей все ее базовые движения. Таким образом активация данных датчиков позволяет получать управляющие сигналы для виртуальной модели руки, создавая наиболее правдоподобную визуализацию ее движений. При недостаточной силы для совершения полного объема движения, например схвата, программное обеспечение достраивает полный объем движения, визуализируемый реабилитируемому, таким образом несмотря на частичную, неполную двигательную активность реабилитируемого с помощью программного обеспечения производиться демонстрация полного, завершенного движения, соответствующего взаимодействию с тем или иным объектом виртуальной реальности. Ощущение жесткости предмета, необходимого для формирования необходимого сжатия предмета, кистью и взаимодействия с визуализируемыми предметами, соответствующих предметам с различной плотностью в физическом мире. При первичном контакте с объектом активизируются электромеханические устройства, расположенные в проекции каждой из трех фаланг всех пальцев. Данные электромеханические устройства функционируют создавая ощущения прикосновения к кожной поверхности ладонной поверхности при их включении, за счет подвижной части устройства, являющегося результатом электромеханического преобразования. Данное устройство активизируется в результате совмещения координат виртуального объекта и координат кисти пользователя, вычисляемых посредством функционирования программного обеспечения на основе кинематической модели руки. Данные электромеханические устройства активизируются в соответствии с формой виртуального объекта. Для создания тактильных ощущений данный датчик обеспечивают воздействие прикосновения идентичному давлению оказываемым монофиламентом весом 50 г, длительностью 2,24 с, для предотвращения сенсибилизации, длительностью 0,5-0,8 с. Данные датчики включаются и выключаются в течение всего времени контакта с виртуальным объектом. По мере дальнейшего контакта с предметом и попыткой его оторвать от виртуальной поверхности, где он находится (например, стола) необходимо формирование ощущение плотности предмета. Данные проприоцептивные ощущения плотности предмета контакта реализуются за счет воздействии вибрационных устройств. Данные устройства располагаются в том же количестве и расположении, что и электромеханические устройства, описанные выше. Данные устройства функционируют когерентно с частотой 8 до 300 Гц с шагом изменения 5%, коррелируя с интенсивностью сжатия предмета, необходимой для перемещения виртуальных объектов с различной условной массой. Длительность включения данных устройств до 2 сек, с перерывом в 1 сек., для уменьшения выраженности сенсорной сенсибилизации рецепторов, обеспечивающих вибрационную чувствительность. В случаях когда чувствительность у реабилитируемого снижена, но не полностью утрачена, интенсивность работы вибрационных устройств повышается, до формирования естественных физическим, ощущениями. Таким образом формируется нарушенная биологическая обратная связи проприоцептивного подтверждения взаимодействия с виртуальным объектом. Сочетания тактильного и вибрационного воздействия дает ощущения стереогноза, трехмерного ощущения формы виртуального объекта. При взаимодействии с виртуальным предметом имеющим также и условную более высокую температуру (например, чашка с горячим чаем), формируется ощущение температуры виртуального объекта, за счет интегрированных в перчатку нагревательных устройств в проекции дистальных или средних фаланг пальцев, в общем количестве 5 элементов. Данные электрические нагреватели активизируются с предметом виртуальной реальности, обозначенным как горячий. Данное устройство повышают температуру до 43°, длительностью 0,5-0,8 сек, с интервалами между повышением температуры 2 сек, для предупреждения адаптации температурных рецепторов TRPV1. При использовании данного устройства происходит восстановление двигательной функции верхней конечности, в частности кисти за счет восстановления сложных сенсорных ощущений или их формирование при сохранности сенсорной системы посредством активации рецепторов ладонной поверхности, уместных при взаимодействии с объектами виртуальной реальности различной плотности, температуры и массы. Данное устройство позволяет формировать сложные сенсорные ощущения, такие как стереогноз. За счет использования данного технического устройства достигается восстановление двигательной функции пораженной конечности, а именно кисти, за счет активации контралатерального полушария и нивелирования мальадаптивной нейропластичности, связанной с компенсацией движений за счет ипсилатерального полушария.
Клинический пример 1. Пациент К., 56 года. Поступил в неврологическое отделение для больных острым нарушением мозгового кровообращения 20.08.2019 г. с диагнозом «Острое нарушение мозгового кровообращения - ишемический инсульт в бассейне левой средней мозговой артерии от 20.08.2019 г.». На момент поступления в неврологическом статусе у пациента выраженные двигательные нарушения в виде центрального пареза правых конечностей до 2 баллов, преимущественно в дистальных отделах верхней конечности (до 0 баллов). Чувствительных нарушений у пациента не наблюдалось. Пациенту проводилась медикаментозная терапия согласно федеральному стандарту оказания медицинской помощь пациентам с острым нарушением мозгового кровообращения. С третьего дня после возникновения инсульта пациенту начали проводиться реабилитационные мероприятия. К данному времени пациент с посторонней помощью мог сидеть в течение 30 минут. Анкетирование пациента на данный момент по шкале двигательной активности (шкала Фугл-Майер для верхней конечности) составляла 15 баллов. Самообслуживание пациента имело выраженные нарушения. С пятого дня от момента возникновения инсульта пациенту также начата двигательная реабилитация верхних конечностей с использование эксплицитного взаимодействия с бытовыми объектами в виртуальной реальности. Занятия происходили в кабинете реабилитации, куда пациент доставлялся с помощью инвалидного кресла. Пациент продолжал находиться в кресле в течение всей процедуры реабилитации. На голову пациенту надевался электроэнцефалографический шлем с 6 датчиками, располагаемыми в проекции сенсомоторной коры. Также, надевались очки виртуальной реальности, на руки, а именно кисти, надевались перчатки с установленными на них устройств обеспечивающих вибрацию, тактильное воздействие и давление, подтверждающие взаимодействие с виртуальным объектом. Затем производился запуск программы, демонстрирующей пациенту обеденный стол с расположенными на нем столовыми приборами и пищевыми продуктами (фруктами) имеющими круглую или овальную форму. Пациент взаимодействовал с объектами виртуальной реальности с помощью базовых движений кисти (цилиндрический и шарообразный схват, а также движения отдельных пальцев).
При этом каждый контакт кисти виртуального аватара с предметами расположенными на столе был сопряжен с виброоткликом и активацией электромеханических устройств от устройств, расположенных на кисти пациента, интенсивность которых менялась в зависимости от вида предмета, предполагаемой массы и жесткости виртуальных предметов, соответствующих идентичным предметам физического мира.
По данным получаемым с электроэнцефалографических датчиков проводился контроль инициации и объем двигательной активности, кисти, что позволяло визуализировать ее движение при поступлении сигналов с контралатеральной коры сенсомоторной коры головного мозга и ограничивать визуализацию и вибрационное взаимодействие, если активность преимущественно была в ипсилатеральной коре головного мозга. Длительность реабилитации занимала от 20 минут в начале курса, до 50 минут по его окончании. В общей сложности с пациентом было проведено 11 занятий, проходивших ежедневно. К концу реабилитации с использованием данного устройства пациент смог совершать большинство движений в проксимальных отделах конечностей, появились движения в дистальных отделах конечности по типу цилиндрического схвата. При этом активность пациента значительно возросла, он стал независимым при передвижении, смог пользоваться ортопедическими столовыми приборами. Таким образом, у пациента к концу проведенных занятий на данном комплексе восстановилось большинство двигательных навыков, необходимых для восстановления локомоторной функции верхней конечности, при этом балл по шкале Фугл-Майер составил 40 баллов (по разделу движение).
Клинический пример 2. Пациентка С., 63 года. Поступила в неврологическое отделение для больных острым нарушением мозгового кровообращения 15.07.2019 г. с диагнозом «Острое нарушение мозгового кровообращения - ишемический инсульт в бассейне правой средней мозговой артерии от 15.07.2019 г.». На момент поступления в неврологическом статусе у пациента выраженные двигательные нарушения в виде центрального пареза левых конечностей до 0 баллов. Чувствительные нарушения в виде правосторонней тактильной гемигипестезии. Пациентке проводилась медикаментозная терапия согласно федеральному стандарту оказания медицинской помощь пациентам с острым нарушением мозгового кровообращения. С четвертого дня после возникновения инсульта пациентке начали проводиться реабилитационные мероприятия. К данному времени пациентка с посторонней помощью мог сидеть в течение 40 минут. Анкетирование пациента на данный момент по шкале двигательной активности (шкала Фугл-Майер для верхней конечности) составляла 4 балла по разделу “A-D” баллов, по разделу чувствительность составляла 6 баллов. Пациентка не могла пользоваться левой рукой при выполнении бимануальных движений. Занятия происходили в кабинете реабилитации, куда пациент доставлялся с помощью инвалидного кресла в сопровождении ухаживающего персонала. Реабилитационные занятия происходили в положении сидя. На голову пациенту надевался электроэнцефалографический шлем с 6 датчиками, располагаемыми в проекции сенсомоторной коры. Также, надевались очки виртуальной реальности, на руки, а именно кисти, надевались перчатки с установленными на них устройствами обеспечивающих общую чувствительность при взаимодействии с виртуальными объектами. Затем производился запуск программы, демонстрирующей пациентке обеденный стол с расположенными на нем столовыми приборами и пищевыми продуктами (фруктами) имеющими круглую или овальную форму. Пациентке давалась инструкция взять тот или оной фрукт с помощью целиндрического или шарового схвата левой рукой.
Демонстрируемые предметы многократно подсвечивались 3 раза в секунду с течении 5 секунд. По данным ЭЭГ, регистрируемым в данный момент после обработки, получался потенциал связанный с событием в ответ на зрительную стимуляцию. Данный сигнал использовался для управления визуализацией движения. При этом пациентке визуализировалось движения схвата левой рукой фрукта на котором она сосредотачивала внимание. В момент контакта с виртуальным фруктом происходила активации устройств обеспечивающих общую чувствительность, расположенных на ладонной поверхности кисти. Длительность реабилитации занимала от 15 минут в начале курса, до 50 минут по его окончании. В общей сложности с пациентом было проведено 12 занятий, проходивших ежедневно. К концу реабилитации с использованием данного устройства пациентка смогла совершать большинство движений в проксимальных отделах конечностей, появились движения в дистальных отделах конечности по типу шарового схвата. Балл по шкале Фугл-Майер составил 21 баллов (по разделу “A-D”) для верхней конечности, по разделу чувствительность 24 балла.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ формирования фантомной карты кисти у пациентов с ампутацией верхней конечности на основе активации нейропластичности | 2021 |
|
RU2766044C1 |
| Способ социально-бытовой адаптации пациентов с когнитивными и речевыми нарушениями | 2021 |
|
RU2798703C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПЕРЧАТКИ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ (ВАРИАНТЫ) | 2017 |
|
RU2670649C9 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ПЕРЧАТКИ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ | 2017 |
|
RU2673406C1 |
| Способ реабилитации больных в различных стадиях нарушений центральной или периферической нервной системы с использованием виртуальной реальности | 2016 |
|
RU2655200C1 |
| Способ реабилитации нарушений предметно-манипулятивной деятельности верхней конечности методом эрготерапии в виртуальной среде у пациентов, перенесших ишемический инсульт | 2023 |
|
RU2817336C1 |
| Способ персонализированной физической реабилитации больных с двигательными нарушениями лучезапястных суставов и пальцев кисти | 2020 |
|
RU2739699C1 |
| Способ реабилитации пациентов с неврологическими нарушениями после ишемического инсульта | 2023 |
|
RU2829423C2 |
| СПОСОБ РЕАБИЛИТАЦИИ ПАЦИЕНТОВ ПРИ ПОВРЕЖДЕНИИ ГОЛОВНОГО МОЗГА С ИСПОЛЬЗОВАНИЕМ АППАРАТНОГО КОМПЛЕКСА ПНЕВМАТИЧЕСКОЙ КОМПРЕССИИ И ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ | 2023 |
|
RU2823510C1 |
| Тренажер с биологической обратной связью для реабилитации суставов кистей и пальцев рук и способ его работы | 2019 |
|
RU2720323C1 |
Изобретение относится к медицине, а именно к формированию общей чувствительности в виртуальной среде и к реабилитации, и может быть использовано при восстановлении двигательной функции верхней конечности и обучению моторным навыкам. Предложено устройство, которое состоит из блока управления, коммуникаций, связанных с указанным устройством, и осуществляющего коммуникацию с управляющим программным обеспечением компьютера или смартфона, очков виртуальной реальности и перчатки, оснащенной вибрационными, нагревательными и электромеханическими элементами, используемыми для стимуляции рецепторов и имитации контактных экстероцептивных ощущений, причем элементы расположены в проекции каждой из трех фаланг всех пальцев причем, электромеханические вибрационные элементы функционируют когерентно с частотой от 8 до 300 Гц с шагом изменения 5%, коррелируя с интенсивностью сжатия предмета, необходимой для перемещения виртуальных объектов с различной условной массой, а тензодатчики, располагаемые по пятнадцать на ладонной и тыльной поверхности кисти в проекции суставов фаланг кисти и лучезапястного сустава, обеспечивают регистрацию кинематики кисти, основанной на 22 степенях свободы, и регистрируют изменения радиуса жеста в том или ином суставе кисти от 5 мм, кроме того, содержит устройство регистрации электроэнцефалограммы, обеспечивающее регистрацию изменения мощности и длительность частот электроэнцефалограммы в сенсомоторной области, и оптический трекер, обеспечивающий сопоставление расположения верхней конечности в физическом мире и в виртуальной реальности и обеспечивающий оценку движения верхней конечности в плечевом, локтевом и лучезапястном суставах. Изобретение обеспечивает расширение арсенала технических средств, позволяющих формировать сложные виды чувствительности в виртуальной среде и обеспечивающих обучение моторным навыкам и проведению двигательной реабилитации пациентов с поражением верхней конечности с учетом индивидуальных особенностей двигательных и сенсорных нарушений. 3 ил., 2 пр.
Устройство формирования общей чувствительности в виртуальной среде состоит из блока управления, коммуникаций, связанных с указанным устройством, и осуществляющего коммуникацию с управляющим программным обеспечением компьютера или смартфона, очков виртуальной реальности и перчатки, оснащенной вибрационными, нагревательными и электромеханическими элементами, используемыми для стимуляции рецепторов и имитации контактных экстероцептивных ощущений, отличающееся тем, что элементы расположены в проекции каждой из трех фаланг всех пальцев, причем электромеханические вибрационные элементы функционируют когерентно с частотой от 8 до 300 Гц с шагом изменения 5%, коррелируя с интенсивностью сжатия предмета, необходимой для перемещения виртуальных объектов с различной условной массой, а тензодатчики, располагаемые по пятнадцать на ладонной и тыльной поверхности кисти в проекции суставов фаланг кисти и лучезапястного сустава, обеспечивают регистрацию кинематики кисти, основанной на 22 степенях свободы, и регистрируют изменения радиуса жеста в том или ином суставе кисти от 5 мм, кроме того, содержит устройство регистрации электроэнцефалограммы, обеспечивающее регистрацию изменения мощности и длительность частот электроэнцефалограммы в сенсомоторной области, и оптический трекер, обеспечивающий сопоставление расположения верхней конечности в физическом мире и в виртуальной реальности и обеспечивающий оценку движения верхней конечности в плечевом, локтевом и лучезапястном суставах.
| US 2016274662 A1, 22.09.2016 | |||
| RU 2017126891, 28.01.2019 | |||
| US 2017123487, 04.05.2017 | |||
| US 20160139666 A1, 19.05.2016. |

