Область техники, к которой относится изобретение
Настоящее изобретение относится к ручной машине с совершающим возвратно-поступательное движение рабочим инструментом, прежде всего к лобзиковой пиле с возвратно-поступательным движением пильного полотна, согласно ограничительной части пункта 1 формулы изобретения.
Уровень техники
При использовании ручной машины, выполненной, например, в виде механической пилы с возвратно-поступательным движением зажатого на одном конце пильного полотна (DE 10119561 А1), точное пиление по предварительно начерченному на заготовке контуру требует хорошего навыка. Несмотря на это, существует опасность получения дефектных пропилов, поскольку пильное полотно подвержено уводу вследствие поперечных усилий, возникающих на его полотне при пилении. При этом увод пильного полотна всегда начинается на нижней стороне заготовки, т.е. у нижней кромки пропила, так что когда оператор заметит увод пильного полотна на верхней стороне заготовки, на нижней ее стороне уже произойдет относительно большое отклонение пропила от заданного контура. К тому моменту, когда при выявлении такого отклонения траектории пропила на поверхности заготовки оператор совершит корректирующее воздействие, на нижней кромке пропила появится значительный дефект, компенсировать который уже невозможно. Даже при ведении ручной машины на поверхности заготовки точно по линии разметки невозможно гарантированно исключить увод пильного полотна на нижней стороне заготовки.
Раскрытие изобретения
Предлагаемая в изобретении ручная машина, охарактеризованная в пункте 1 формулы, имеет то преимущество, что благодаря измерению поперечных усилий выше верхней кромки пропила и вблизи нее и приведению в действие компенсирующего поперечные усилия исполнительного органа, сообщающего рабочему инструменту минимальные выравнивающие движения, противодействие поперечным усилиям начинается уже при их первом появлении на пильном полотне, что препятствует уводу рабочего инструмента, прежде всего пильного полотна, при выполнении прямолинейных пропилов или пропилов по дуге постоянного радиуса.
Конструктивные мероприятия, приведенные в зависимых пунктах формулы изобретения, характеризуют предпочтительные варианты выполнения ручной машины по пункту 1 формулы.
Краткое описание чертежей
Ниже изобретение рассматривается более подробно на примере варианта его осуществления со ссылкой на чертежи, на которых в схематичном представлении показаны:
на фиг.1 - вид сбоку лобзиковой пилы,
на фиг.2 - местный вид II при взгляде в направлении стрелки II на фиг.1,
на фиг.3 - контур регулирования в ручной машине, показанной на фиг.1 и 2.
Осуществление изобретения
Лобзиковая пила, схематично изображенная в виде сбоку на фиг.1 в качестве варианта выполнения ручной машины с совершающим возвратно-поступательное движение рабочим инструментом, имеет корпус 10 машины, в котором расположен электрический двигатель, включаемый и выключаемый посредством выключателя 11 питания и приводящий через механическую передачу ползун 12, также называемый штоком, в возвратно-поступательное движение, направленное вверх-вниз. Ползун 12 установлен с возможностью направленного перемещения по вертикали в опоре 22, схематично обозначенной на фиг.2. На нижнем конце ползуна 12 расположен держатель 13 рабочего инструмента, в котором одним концом зажато пильное полотно. Пильное полотно 14 имеет на противоположных узких сторонах рабочую зубчатую кромку 141 с одной стороны и спинку 142 с другой стороны. Во время рабочего хода пильного полотна 14 оно опирается спинкой 142 на поддерживающий ролик 15, закрепленный на корпусе 10 машины. Кроме того, на корпусе 10 машины закреплена опорная плита 16, также называемая подошвой, расположенная снизу корпуса 10 и предназначенная для установки лобзиковой пилы на заготовку и ведения лобзиковой пилы. Пильное полотно 14, движущееся перпендикулярно опорной плите 16, пропущено через выемку 161 в опорной плите 16. На фиг.1 показан лишь фрагмент опорной плиты 16. Лобзиковая пила снабжена направляющим механизмом 17, который с двух сторон направляет движение пильного полотна 14 вблизи опорной плиты 16. Направляющий механизм 17 состоит из двух направляющих колодок 18, каждая из которых обращена к одной из двух противоположных боковых поверхностей 143 пильного полотна 14.
Кроме того, механическая пила с возвратно-поступательным движением пильного полотна имеет устройство для компенсации поперечных усилий, препятствующее уводу пильного полотна 14 при выполнении прямолинейных пропилов или пропилов по дуге постоянного радиуса. Устройство для компенсации поперечных усилий включает в себя два преобразователя 19 силы, регулятор 20 и исполнительный орган 21. Преобразователи силы 19, регулятор 20 и исполнительный орган 21 объединены в замкнутый контур регулирования, изображенный на фиг.3. Преобразователи 19 силы, выполненные, например, в виде пьезоэлементов, встроены в соответствующие направляющие колодки 18 направляющего механизма 17 и измеряют возникающие на пильном полотне 14 поперечные усилия, действующие на пильное полотно 14 поперек направления его возвратно-поступательного движения. Выходные сигналы обоих преобразователей 19 силы вводятся в регулятор 20, вырабатывающий зависящее от величины сигналов преобразователей силы регулирующее воздействие на исполнительный орган 21, который, в свою очередь, осуществляет минимальный поворот пильного полотна 14 настолько, чтобы компенсировать поперечное усилие, действующее в данный момент на пильное полотно 14. Исполнительный орган 21 представляет собой, например, пьезоэлектрический исполнительный элемент, который в рассматриваемом варианте осуществления изобретения воздействует на держатель рабочего инструмента или на ползун 12 и вызывает минимальный поворот держателя рабочего инструмента или ползуна 12. Для этого ползун 12 может быть выполнен с возможностью поворота в определенных пределах, или же такой поворот может осуществляться только выбиранием имеющегося окружного люфта ползуна 12. При жесткой установке ползуна 12 создаваемые исполнительным органом усилия могут прикладываться к пильному полотну 14 и непосредственно, например, через направляющие колодки 18 или иные боковые направляющие ролики, которые могут перемещаться линейно или поворачиваться. В другом варианте осуществления изобретения поперечные усилия можно также измерять на ползуне 12 или его нижней опоре 22 посредством преобразователей 19 силы или по определенным деформациям опоры.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕХНОЛОГИЧЕСКАЯ МАШИНА, ПРЕЖДЕ ВСЕГО РУЧНАЯ МАШИНА | 2009 |
|
RU2516430C2 |
| РУЧНАЯ МАШИНА, ПРЕЖДЕ ВСЕГО ЛОБЗИКОВАЯ ПИЛА, ДИСКОВАЯ ПИЛА, ФРЕЗЕРНАЯ МАШИНА ИЛИ РУБАНОК | 2009 |
|
RU2533073C2 |
| РУЧНАЯ МЕХАНИЗИРОВАННАЯ ПИЛА С ВОЗВРАТНО-ПОСТУПАТЕЛЬНЫМ ДВИЖЕНИЕМ ПИЛЬНОГО ПОЛОТНА | 2007 |
|
RU2465988C2 |
| РУЧНАЯ МАШИНА | 2008 |
|
RU2481178C2 |
| РУЧНАЯ МЕХАНИЧЕСКАЯ ПИЛА ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДЕЙСТВИЯ | 2009 |
|
RU2499653C2 |
| ТЕХНОЛОГИЧЕСКАЯ МАШИНА С РАБОЧИМ ИНСТРУМЕНТОМ В ВИДЕ ПИЛЬНОГО ПОЛОТНА | 2009 |
|
RU2509636C2 |
| МЕХАНИЧЕСКАЯ ПИЛА С ВОЗВРАТНО-ПОСТУПАТЕЛЬНЫМ ДВИЖЕНИЕМ ПИЛЬНОГО ПОЛОТНА, ПРЕЖДЕ ВСЕГО ЛОБЗИКОВАЯ ПИЛА | 2007 |
|
RU2456132C2 |
| ТЕХНОЛОГИЧЕСКАЯ МАШИНА | 2010 |
|
RU2543115C2 |
| ОПОРНО-НАПРАВЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ БАЗИРОВАНИЯ ЗАГОТОВКИ И НАПРАВЛЕНИЯ ДВИЖЕНИЯ РЕЖУЩЕГО ИНСТРУМЕНТА | 2008 |
|
RU2455129C2 |
| Лобзиковая пила с возвратно-поступательным движением пильного полотна | 2023 |
|
RU2810592C1 |


Изобретение относится к ручной машине с совершающим возвратно-поступательное движение рабочим инструментом. Ручная машина - преимущественно механическая пила с возвратно-поступательным движением пильного полотна (14). Рабочий инструмент снабжен по меньшей мере одним преобразователем (19) силы, измеряющим величину поперечного усилия, возникающего на рабочем инструменте и действующего поперек направления его движения. Для компенсации указанного поперечного усилия предусмотрен по меньшей мере один исполнительный орган (21), воздействующий на рабочий инструмент в зависимости от измеренной величины поперечного усилия. В результате обеспечивается исключение увода рабочего инструмента, преимущественно пильного полотна. 8 з.п. ф-лы, 3 ил.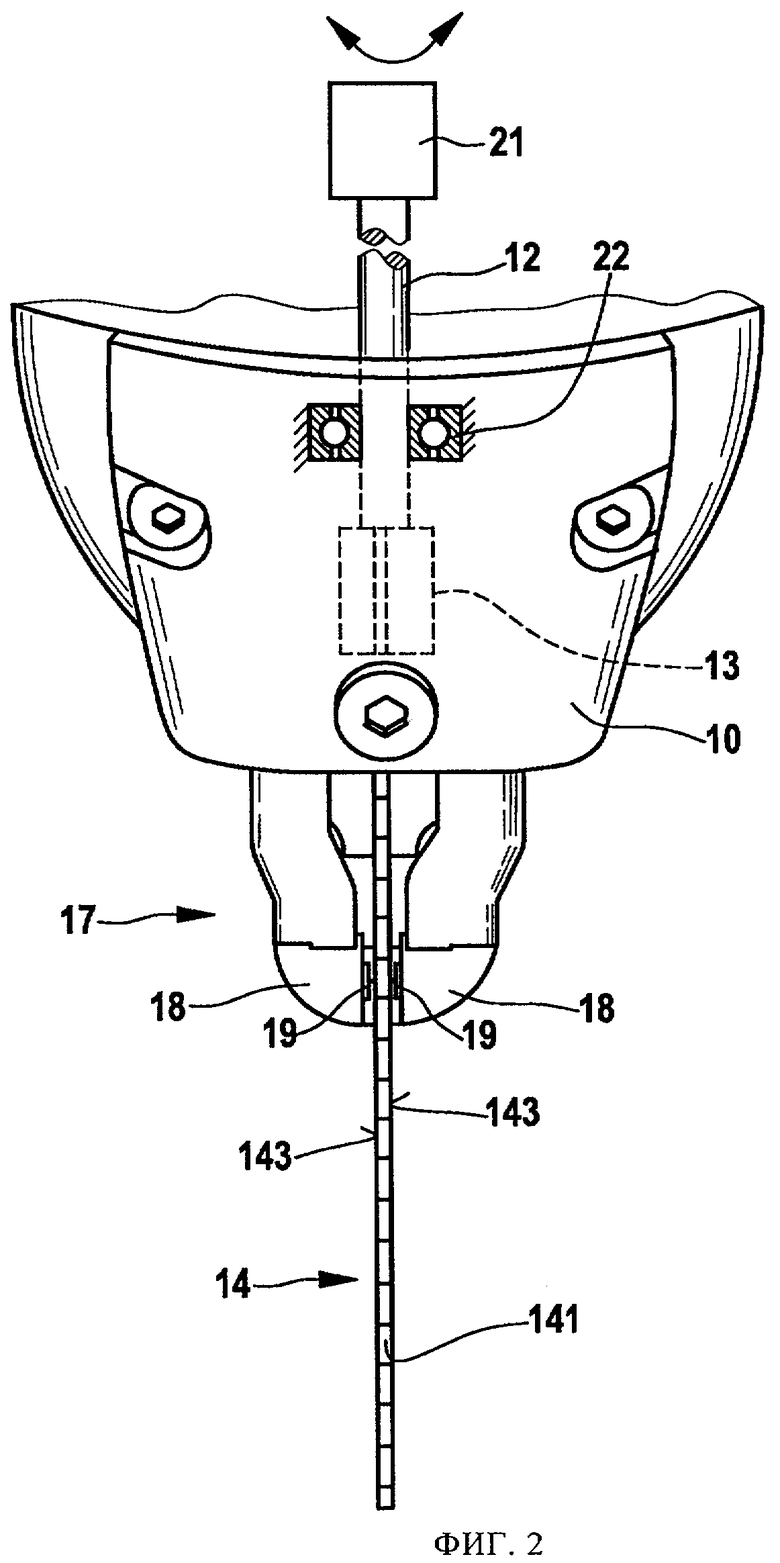
1. Ручная машина с совершающим возвратно-поступательное движение рабочим инструментом, преимущественно механическая пила с возвратно-поступательным движением пильного полотна (14), отличающаяся тем, что с рабочим инструментом сопряжен по меньшей мере один преобразователь (19) силы, измеряющий величину поперечного усилия, возникающего на рабочем инструменте и действующего поперек направления его движения, и для компенсации этого поперечного усилия предусмотрен по меньшей мере один исполнительный орган (21), воздействующий на рабочий инструмент в зависимости от измеренной величины поперечного усилия.
2. Ручная машина по п.1, отличающаяся тем, что рабочий инструмент зажат в приводимом в движение держателе (13), а по меньшей мере один преобразователь (19) силы установлен на расстоянии от держателя (13) рабочего инструмента неподвижно относительно рабочего инструмента.
3. Ручная машина по п.1, отличающаяся тем, что с противоположных сторон рабочего инструмента расположено по одному преобразователю (19) силы, и оба преобразователя (19) силы расположены непосредственно у рабочего инструмента напротив друг друга.
4. Ручная машина по п.3, отличающаяся тем, что движение рабочего инструмента направлено с двух сторон направляющими колодками (18), неподвижными относительно рабочего инструмента и расположенными у рабочего инструмента напротив друг друга, причем в каждую направляющую колодку (18) встроен преобразователь (19) силы.
5. Ручная машина по одному из пп.1-4, отличающаяся тем, что по меньшей мере один исполнительный орган (21) выполнен с возможностью по меньшей мере минимального поворота рабочего инструмента вокруг его продольной оси.
6. Ручная машина по п.5, отличающаяся тем, что исполнительный орган (21) выполнен с возможностью воздействия на держатель (13) рабочего инструмента или на ползун (12), на конце которого расположен держатель (13).
7. Ручная машина по п.1, отличающаяся тем, что преобразователи (19) силы и исполнительный орган (21) включены в контур регулирования.
8. Ручная машина по п.1, отличающаяся тем, что преобразователь (19) силы имеет пьезоэлемент.
9. Ручная машина по п.1, отличающаяся тем, что исполнительный орган (21) представляет собой пьезоэлектрический исполнительный элемент.
| DE 10119561 A1, 24.10.2002 | |||
| Способ получения целлюлозы из шелухи хлопковых семян и других растительных материалов | 1931 |
|
SU31216A1 |
| ЛОБЗИКОВЫЙ СТАНОК | 1991 |
|
RU2038954C1 |
| DE 19653242 A1, 25.06.1998. | |||

