Настоящее изобретение относится к ручной машине.
Технологические машины, и прежде всего ручные машины, открывают все больше возможностей их применения и в связи с многообразием этих возможностей применения получают все больше доступных оператору настроек и регулировок. В целом это приводит к увеличению числа возможных ошибок, вследствие чего работа без ошибок требует от оператора все более глубоких знаний. Учитывая то, что пользователи зачастую используют такие технологические машины лишь в единичных случаях, их знания о современных возможностях машин, а значит, и об источниках ошибок при работе с ними, даже при хорошем информационном обеспечении, обычно являются неполными, а иногда вообще отсутствуют.
Поэтому технологические машины во всевозрастающем объеме оснащаются встроенными или навесными средствами помощи оператору, например, направляющими или упорами, которые помогают оператору при работе лобзиковыми пилами выполнять пропилы по заданным линиям. Соответствующие сопрягаемые с машиной вспомогательные устройства часто выполняются компьютеризированными. На основе выполняемых компьютером вычислений для оператора при необходимости выводятся на дисплей соответствующие указания по ведению пилы. На следующих ступенях развития подобных лобзиковых пил, как это известно, например, из публикации DE 102006052808 A1, машина автоматически поддерживает оператора и при ведении рабочего инструмента. Для этого рабочий инструмент, в случае лобзиковой пилы - пильное полотно, приводимое в возвратно-поступательное движение, установлено с возможностью поворота вокруг оси, определяющей направление возвратно-поступательного движения, и автоматически ориентируется по соответствующей рабочей линии (линии разметки).
Эта линия оптически регистрируется предусмотренным со стороны машины сенсором, прежде всего камерой, и на основе сигналов от подключенного к сенсору блока анализа и вычислений исполнительный механизм регулирует угловое положение пильного полотна, устанавливая его по заданной рабочей линии. Этот режим работы является полуавтономным режимом, при котором с оператора, по крайней мере в значительной степени, снимается нагрузка, связанная с ведением лобзиковой пилы по рабочей линии, т.е. по линии разметки, и оператору по существу необходимо лишь осуществлять подачу лобзиковой пилы, примерно выдерживая ее ориентацию, а также воспринимать действующие со стороны пилы усилия.
Сложность подобных лобзиковых пил, а также других ручных машин влечет за собой более высокую зависимость от свойств заготовки и для достижения качественных результатов работы диктует необходимость выбора рабочих инструментов (рабочих органов машины), которые обычно являются сменными, в соответствии условиями работы и, в частности, в соответствии с типом материала обрабатываемой заготовки.
В основу изобретения была положена задача дальнейшего совершенствования ручной машины указанного выше типа в отношении имеющихся у машины вспомогательных средств, поддерживающих оператора и подстраховывающих его при работе с машиной и ее настройке.
Объектом изобретения является ручная машина, прежде всего лобзиковая пила, дисковая пила, фрезерная машина или рубанок, содержащая средства для бесконтактной регистрации свойств обрабатываемой заготовки, средства для обработки данных, относящихся к зарегистрированным свойствам, и/или средства для передачи этих данных оператору. Указанная выше задача решена в такой ручной машине за счет того, что средства регистрации выполнены в виде индуктивного и/или емкостного воспринимающего устройства, способного определять тип материала заготовки, в частности дерево, металл, алюминий и/или медь.
Благодаря оснащению ручной машины сенсорным устройством, позволяющим регистрировать тип материала обрабатываемой заготовки, открывается возможность целенаправленного использования множества заложенных в машине возможностей для оптимизации работы, причем во многих случаях это происходит без какого-либо вмешательства оператора, а при необходимости - с выдачей дополнительных указаний для оператора, чтобы исключить возможные источники ошибок. К вышеупомянутым возможностям можно отнести, например, автоматическую коррекцию ручной машиной частоты вращения или частоты ходов возвратно-поступательного движения согласно типу материала соответствующей заготовки, выдачу сообщений о том, пригоден для установленный в данный момент времени рабочий инструмент для работы по определенному сенсорным устройством типу материала, и/или о том, подходит ли установленный в данный момент времени режим работы ручной машины для обработки заготовки с учетом определенного сенсором типа материала этой заготовки.
Предусмотренное в изобретении определение типа материала может осуществляться путем оценки материала со стороны поверхности заготовки, для чего можно также использовать, например, электромагнитные волны, причем для этого также можно использовать известные детекторы (средства обнаружения), такие, например, как преобразователи Холла, вихретоковые преобразователи или сканеры, которые уже используются, среди прочего, для определения качества поверхности стен в строительной отрасли.
Для осуществления изобретения материалы заготовок достаточно определять, классифицируя их грубо (приближенно), т.е. относя их к основным типам материалов, например дереву, металлу, алюминию и/или меди. Это позволяет обойтись простыми и недорогими системами сенсорной регистрации. В этом отношении также имеет значение то, что проникновение внутрь соответствующей заготовки не требуется, а обнаружение свойств материала осуществляется со стороны поверхности заготовки.
Исходя из результата определения свойств материала можно не только выдавать указания относительно целесообразной в данном случае частоты ходов возвратно-поступательного движения или частоты вращения, а также предпочтительного в данном случае рабочего инструмента, но и проверять соответственно установленные значения регулируемых величин (рабочих параметров) и применяемые рабочие инструменты на предмет того, подходят ли эти значения регулируемых величин для работы с инструментом, используемым с учетом определенного типа материала заготовки. К регулируемым величинам ручных машин, на которые может влиять оператор, относятся, например, скорость подачи и устанавливаемая амплитуда маятникового движения в случае лобзиковых пил, значение ограничения момента в случае резьбозавертывающих машин. Кроме того, изобретение может использоваться в сочетании с системой встроенного контроля для защиты машины.
Помимо управляющих воздействий, осуществляемых в автоматизированном режиме, соответственно без участия оператора, целесообразен также вариант, в котором оператор получает инструкции, например путем вывода этих инструкций на дисплей, относительно необходимых действий, будь то действия по ведению машины, информация о рабочем состоянии машины или же необходимые предупреждения.
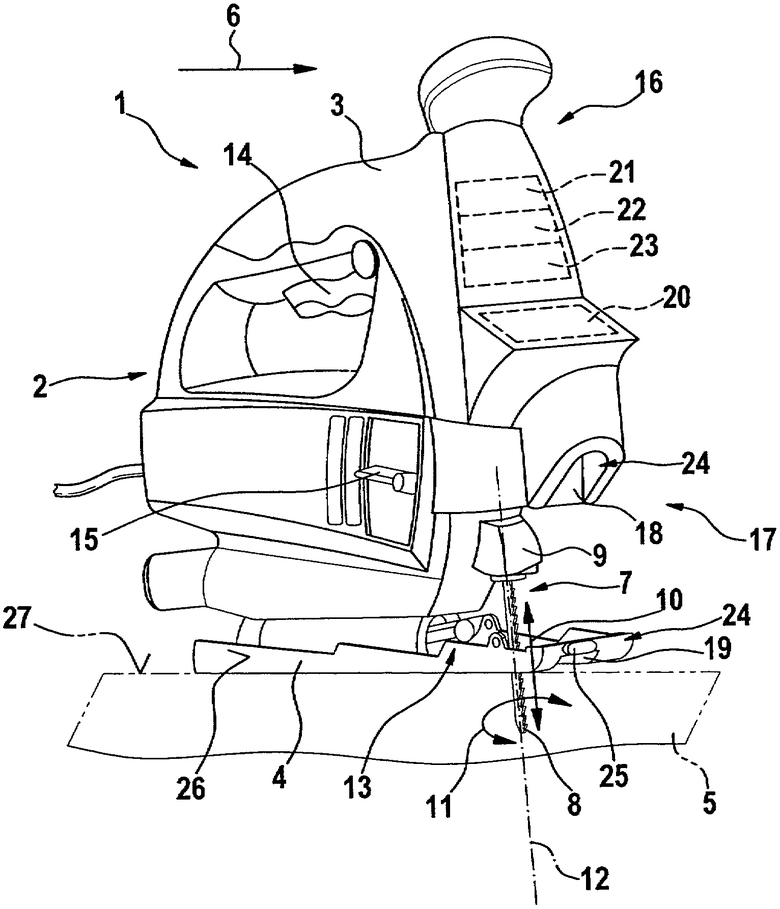
Другие подробности изобретения и его особенности раскрыты в формуле изобретения и приведенном ниже описании его осуществления, поясняемом чертежом, на котором в качестве примера ручной машины приведено изображение в перспективе лобзиковой пилы, установленной на заготовку.
Представленная лобзиковой пилой 2 ручная машина 1 имеет корпус 3, который посредством опорной плиты (подошвы) 4 опирается на заготовку 5 с возможностью перемещения по ней. Направление прямолинейной подачи лобзиковой пилы 2 обозначено стрелкой 6. В этом направлении проходит плоскость пильного полотна 8, представляющего собой рабочий инструмент, или рабочий орган, 7 машины.
Пильное полотно 8 закреплено в держателе 9 и приводится в возвратно-поступательное движение вдоль своей оси возвратно-поступательного движения по стрелке 10. Кроме того, в рассматриваемом варианте выполнения лобзиковой пилы 2 предусмотрена возможность поворота пильного полотна 8 по стрелке 11 вокруг оси 12 поворота, соответствующей оси возвратно-поступательного движения. Дополнительно предусмотрен маятниковый привод 13 для обеспечения маятникового движения (подкачки) пильного полотна 8, при котором пильное полотно 8 качается относительно не показанной на чертеже оси, проходящей перпендикулярно оси 12 поворота и поперек направления 6 подачи.
В этом варианте осуществления изобретения лобзиковой пилой 2 можно работать в различных режимах, устанавливаемых с помощью переключающего устройства 15, одно из положений которого соответствует режиму пиления по прямой в направлении 6 подачи, являющемуся основным режимом. При включенном маятниковом приводе 13 пила работает в режиме маятникового движения, а в сочетании с возможностью поворота пильного полотна 8 вокруг оси 12 поворота лобзиковая пила 2 может работать с регулированием углового положения пильного полотна относительно опорной плиты, т.е. в полуавтономном режиме. В этом режиме оператор должен по существу лишь воспринимать силы реакции, возникающие во время работы пилой, а также осуществлять подачу лобзиковой пилы 2, пильное полотно 8 которой автоматически ориентируется по заданной прямой или искривленной рабочей линии и следует этой линии. Включение и выключение лобзиковой пилы 2 осуществляется с помощью выключателя 14, предусмотренного в рукояточной части корпуса 3.
В передней области 16 корпуса 3, а именно в его нижней части 17, выдающейся уступом за держатель 9 пильного полотна 7, размещено обращенное к рабочей линии воспринимающее устройство 18, обеспечивающее оптическую регистрацию положения пильного полотна 8 относительно проходящей со стороны заготовки рабочей линии. В рассматриваемом варианте осуществления изобретения рабочая зона пильного полотна 8 ограничена выполненной в прилегающей к заготовке 5 опорной плите 4 выемкой 19, которая на чертеже видна только частично и через проекцию которой на заготовку 5 проходит рабочая линия.
Кроме того, в передней области 16 корпуса предусмотрен схематично обозначенный дисплей 20, который расположен в поле зрения оператора и служит, в частности, для отображения выводимой оператору информации.
На чертеже в передней области 16 корпуса также схематично показано, что лобзиковая пила 2 имеет вычислительное устройство 21, электронный блок 22 управления и исполнительный механизм 23 для регулирования углового положения пильного полотна 8 с выверкой последнего по рабочей линии, вдоль которой выполняется пиление.
Кроме того, для определения типа материала заготовки 5 предусмотрено по меньшей мере еще одно воспринимающее устройство 24, которое может быть расположено, в зависимости от его исполнения, в выдающейся уступом части передней области 16 корпуса, например рядом с воспринимающим устройством 18, предпочтительно же в месте, находящемся как можно ближе к заготовке 5, например, на участке 25 бортика 26, проходящего по периметру опорной плиты 4. При этом указанный предпочтительный участок 25 расположен в открытой книзу и обращенной в выемку 19 краевой области, благодаря чему воспринимающее устройство находится на минимальном и равномерном расстоянии от поверхности 27 заготовки.
Воспринимающее устройство 24 выполнено индуктивным и/или емкостным, т.е. образовано индуктивными и/или емкостными преобразователями, но дополнительно может быть образовано преобразователями Холла или же датчиками, которые, будучи излучателями и приемниками электромагнитных волн, позволяют определять тип материала соответствующей заготовки 5. Подобные конструктивно простые и недорогие преобразователи (датчики) вполне позволяют грубо классифицировать материалы по их электрическим или механическим характеристикам, например как дерево, металл, алюминий или пластмассу, причем измерение характеристик осуществляется на поверхности заготовки. В принципе, при осуществлении изобретения можно также использовать несколько видов подобных преобразователей 24 в сочетании друг с другом, если требуется получать данные, выходящие за рамки грубого классифицирования заготовки 5.
Определение типа материала позволяет выдавать оператору, в частности если оператор неопытен, различные указания относительно настроек и регулировок машины, а также ее оснастки, например, указания относительно выбора пригодного для работы по конкретному материалу рабочего инструмента и, в частности с учетом этого выбора, относительно значений частоты вращения и/или частоты ходов возвратно-поступательного движения рабочего инструмента 7, причем при осуществлении изобретения частоту вращения или частоту ходов возвратно-поступательного движения рабочего инструмента 7 предпочтительно автоматически согласовывать с закрепленным в держателе рабочим инструментом, что целесообразно, в частности, в сочетании с соответствующим кодированием рабочего инструмента 7. При соответствующем выполнении машины с подобным распознаванием рабочего инструмента на основе технологии радиочастотной идентификации или посредством кодовых выступов можно даже выполнять проверку правдоподобия установленных значений, что делает для оператора обращение с машиной существенно проще и позволяет избежать ошибочных действий оператора по выбору оснастки и установки режимов работы машины. В случае лобзиковой пилы с маятниковым режимом при необходимости можно выводить на дисплей 20 надлежащее с учетом определенного типа материала положение переключателя амплитуды маятникового движения, а в предпочтительном варианте надлежащий режим маятникового движения может устанавливаться автоматически, и то же самое относится к выбору скорости подачи. В случае ручных машин 1, выполненных в виде резьбозавертывающих (шуруповерты, гайковерты и т.п.) или сверлильных (дрели, перфораторы и т.п.) машин, изобретение позволяет, в частности, автоматически устанавливать ограничение момента с учетом типа материала и/или применяемого рабочего инструмента в зависимости от его вида и размера.
Подобные указания полезны и при эксплуатации других аппаратов, причем это прежде всего касается вопросов, которыми пользователи-любители часто не владеют. Таковыми являются, например, предписанные значения крупности зерна абразива для шлифовальных машин, твердости материала при любых видах пиления, частоты вращения для сверлильных и фрезерных машин. В целом целесообразно также выполнять проверку правдоподобности установленных значений, что также предпочтительно для оператора при выполнении работ как подтверждение правильности выполняемых действий.
| название | год | авторы | номер документа |
|---|---|---|---|
| РУЧНАЯ МЕХАНИЗИРОВАННАЯ ПИЛА С ВОЗВРАТНО-ПОСТУПАТЕЛЬНЫМ ДВИЖЕНИЕМ ПИЛЬНОГО ПОЛОТНА | 2007 |
|
RU2465988C2 |
| ТЕХНОЛОГИЧЕСКАЯ МАШИНА С РАБОЧИМ ИНСТРУМЕНТОМ В ВИДЕ ПИЛЬНОГО ПОЛОТНА | 2009 |
|
RU2509636C2 |
| ТЕХНОЛОГИЧЕСКАЯ МАШИНА, ПРЕЖДЕ ВСЕГО РУЧНАЯ МАШИНА | 2009 |
|
RU2516430C2 |
| РУЧНАЯ МАШИНА | 2008 |
|
RU2457084C2 |
| РУЧНАЯ МЕХАНИЧЕСКАЯ ПИЛА ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДЕЙСТВИЯ | 2009 |
|
RU2499653C2 |
| МЕХАНИЧЕСКАЯ ПИЛА С ВОЗВРАТНО-ПОСТУПАТЕЛЬНЫМ ДВИЖЕНИЕМ ПИЛЬНОГО ПОЛОТНА, ПРЕЖДЕ ВСЕГО ЛОБЗИКОВАЯ ПИЛА | 2007 |
|
RU2456132C2 |
| ТЕХНОЛОГИЧЕСКАЯ МАШИНА | 2010 |
|
RU2543115C2 |
| РУЧНАЯ МАШИНА | 2010 |
|
RU2555284C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ | 2007 |
|
RU2459138C2 |
| РУЧНАЯ МАШИНА | 2010 |
|
RU2560487C2 |
Изобретение относится к ручным машинам, прежде всего к лобзиковым и дисковым пилам, а также к фрезерным машинам или рубанкам. Ручная машина содержит средства для бесконтактной регистрации свойств обрабатываемой заготовки, средства для обработки данных, относящихся к зарегистрированным свойствам, и/или средства для передачи этих данных оператору. Средства регистрации выполнены в виде индуктивного и/или емкостного воспринимающего устройства (24), которое способно определять тип материала заготовки (5), в частности дерево, металл, алюминий и/или медь. 10 з. п. ф-лы, 1 ил.
1. Ручная машина, прежде всего лобзиковая пила, дисковая пила, фрезерная машина или рубанок, содержащая средства для бесконтактной регистрации свойств обрабатываемой заготовки, средства для обработки данных, относящихся к зарегистрированным свойствам, и/или средства для передачи этих данных оператору, отличающаяся тем, что средства регистрации выполнены в виде индуктивного и/или емкостного воспринимающего устройства (24), способного определять тип материала заготовки (5), в частности дерево, металл, алюминий и/или медь.
2. Ручная машина по п.1, отличающаяся тем, что воспринимающее устройство (24) выполнено с возможностью осуществления измерений лишь со стороны поверхности заготовки (5).
3. Ручная машина по п.1, отличающаяся тем, что воспринимающее устройство (24) дополнительно содержит по меньшей мере один магнитный преобразователь, прежде всего преобразователь Холла.
4. Ручная машина по п.1, отличающаяся тем, что воспринимающее устройство (24) дополнительно содержит вихретоковый преобразователь.
5. Ручная машина по п.1, отличающаяся тем, что воспринимающее устройство (24) дополнительно содержит излучатель и приемник электромагнитных волн.
6. Ручная машина по п.1, отличающаяся тем, что воспринимающее устройство (24) размещено у поверхности контакта рабочего инструмента (7) с заготовкой (5) или на этой поверхности.
7. Ручная машина по п.1, отличающаяся тем, что в качестве средства регистрации типа материала предусмотрен сканер.
8. Ручная машина по п.1, отличающаяся тем, что воспринимающее устройство (24) размещено на прикладываемой к заготовке (5) детали машины, прежде всего на опорной плите (4) устанавливаемой на заготовке (5) ручной машины (1).
9. Ручная машина по п.1, отличающаяся тем, что она имеет средства оптического отображения, прежде всего выполненные в виде дисплея (20), для сообщения зарегистрированных данных оператору.
10. Ручная машина по п.1, отличающаяся тем, что она снабжена устройствами, преобразующими зарегистрированные данные в заданные значения регулируемой величины машины и/или в тип ее оснастки и/или использующими эти данные для проверки правдоподобия таких заданных значений относительно значений, соответствующих зарегистрированным данным.
11. Ручная машина по одному из предыдущих пунктов, отличающаяся тем, что она снабжена вычислительным устройством для обработки зарегистрированных данных, прежде всего с подключенными к нему исполнительными механизмами.
| DE 102005052808 A1, 15.05.2008 | |||
| US 5974643 A | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| US 5175964 A, 05.01.1993 | |||
| ПИЛА РУЧНАЯ ЭЛЕКТРИЧЕСКАЯ ДИСКОВАЯ (ВАРИАНТЫ) | 2004 |
|
RU2274518C2 |
| РУЧНОЙ ЭЛЕКТРИЧЕСКИЙ ИНСТРУМЕНТ | 1990 |
|
RU2071903C1 |
| РУЧНОЙ ЭЛЕКТРИЧЕСКИЙ ПЕРФОРАТОР | 1992 |
|
RU2057634C1 |
| DE 3503172 B1, 08.05.1991 | |||

