Заявленное изобретение предназначено для горнодобывающей отрасли, в частности к способам производства горизонтальных и вертикальных соединительных съемок подземных горных выработок через вертикальные стволы или другие крутонаклонные выработки, например, шахтные восстающие.
Заявляемое изобретение относится к приоритетному направлению науки и техники «Технологии экологически безопасной разработки месторождений и добычи полезных ископаемых», так направлено на решение проблемы геометрической связи между съемками на земной поверхности и в подземных горных выработках в принятой на поверхности системе координат X, Y и Z.
Известен способ ориентирования с помощью гирокомпаса, например, МВТ2, МВТ4 (Маркшейдерское дело: Учеб. для вузов. - В двух частях / Под ред. И.Н. Ушакова. - 3-е изд., перераб. и доп. - М.: Недра, 1989. - Часть 1 / И.Н. Ушаков и др. - С.127-144), который относится к физическим способам ориентирования - определения дирекционного угла подземной маркшейдерской сети с использованием гироскопического принципа.
Согласно известному способу сначала определяется гироскопический азимут какой-либо стороны подземной маркшейдерской опорной сети, затем, через соответствующую поправку (определенную на поверхности), находят ее дирекционный угол. При гироскопическом ориентировании задачи центрирования и ориентирования подземных горизонтов решаются раздельно.
Общими признаками известного аналога с существенными признаками заявляемого способа являются проведение подготовительных работ путем определения дирекционного угла и выполнение камеральной обработки.
К недостаткам аналога относятся:
- достаточно высокая трудоемкость подготовительных и исполнительных (полевых) работ, что увеличивает время, необходимое для ориентирования (определения дирекционного угла) подземной маркшейдерской опорной сети в системе координат, принятой на поверхности (следовательно, и подземных горизонтов);
- самостоятельное выполнение работ по определению координаты Z в шахте (вертикальная соединительная съемка), что приводит к необходимости монтажа дополнительного оборудования, увеличивающего трудоемкость и сроки проведения всего комплекса ориентирно-соединительной съемки.
Известен способ вертикальной соединительной съемки (Маркшейдерское дело: Учеб. для вузов. - В двух частях / Под ред. И.Н. Ушакова. - 3-е изд., перераб. и доп. - М.: Недра, 1989. - Часть 1 / И.Н. Ушаков и др. - С.145-147), который выполняет задачу передачи высотной отметки с поверхности в шахту с помощью длинной шахтной ленты.
Общими признаками аналога, совпадающими с существенными признаками заявляемого способа, являются также проведение подготовительных работ в виде монтажа оборудования и передача координаты Z на исходный репер на поверхности.
К недостаткам аналога относится низкая оперативность определения отметки маркшейдерской точки в подземной выработке и недостаточная точность из-за введения поправок в результаты полевых измерений за компарирование ленты (рулетки), за температуру, за удлинение ленты от собственного веса и подвешиваемого груза.
Также известен способ (Маркшейдерское дело: Учеб. для вузов. - В двух частях / Под ред. И.Н. Ушакова. - 3-е изд., перераб. и доп. - М.: Недра, 1989. - Часть 1 / И.Н. Ушаков и др. - С.148-150) передачи высотной отметки с поверхности на исходный пункт (репер) подземной маркшейдерской опорной сети с помощью длинномера ДА-2.
Общими признаками данного аналога, совпадающими с существенными признаками заявляемого способа, является: монтаж оборудования на поверхности (в надшахтном здании), передача отметки (координаты Z) на исходный репер в надшахтном здании и в подземную выработку, камеральная обработка результатов измерений.
К недостаткам вышеуказанного способа относятся невысокая точность передачи отметок из-за введения приборных поправок и необходимость в использовании одновременно двух бригад исполнителей для работ дополнительного монтажа специального оборудования, что увеличивает сроки передачи отметки с поверхности в шахту и снижает точность конечного результата.
Известен способ передачи высотной отметки в шахту с применением светодальномера, например СТ5. (Снетков В.И. Теоретические основы и практические способы передачи высотной отметки с поверхности в шахту с помощью светодальномеров / В.И. Снетков // Маркшейдерский вестник. - 2004. - №3. - С.42-45).
При этом передача высотной отметки осуществляется следующим образом. На крыше шахтной клети, выставленной на уровне нулевой площадки на дневной поверхности, устанавливается штатив и на нем закрепляется группа призменных отражателей; клеть опускается на горизонт передачи отметки. Затем производится перекрытие досками устья ствола, установка светодальномера на перекрытии, определение отметки оптического центра светодальномера от репера с помощью нивелира. Определение отметок призменных отражателей, расположенных на крыше клети, осуществляется путем измерения вертикальных расстояний светодальномером до отражателей. Далее, с помощью нивелира отметка от отражателей передается на репер, заложенный в подземной выработке, или на маркшейдерскую точку (пункт).
Признаками, совпадающими с существенными признаками заявленного способа, являются: передача высотной отметки на оптический центр светодальномера; последующая передача отметки на группу призменных отражателей; определение абсолютной отметки репера (маркшейдерского пункта) в подземной выработке.
К недостаткам этого способа относятся следующие положения:
- способ применим только в вертикальных и сухих выработках;
- выполняется самостоятельно в дополнение к способам передачи дирекционного угла в шахту и плановых координат X, У;
- повышенная опасность производства маркшейдерских работ на подземном горизонте в связи с тем, что защитный козырек на клети для обеспечения прямой видимости «светодальномер-отражатели» на время передачи отметки убирается.
- участие во всех измерениях непосредственно человека, вводящего дополнительные ошибки (человеческий фактор).
За прототип заявленного способа принят способ горизонтальной соединительной съемки, относящийся к геометрическим способам ориентирования, где задействовано два отвеса (Борщ-Компаниец В.И. Геодезия. Маркшейдерское дело: Учебник для вузов. - М.: Недра, 1989 - С.310-315) и который решает две задачи:
- центрирование подземных маркшейдерских сетей;
- ориентирование подземных маркшейдерских сетей, то есть передачу дирекционного угла с поверхности в шахту.
Центрирование сети заключается в определении плановых координат Х и Y исходного пункта подземной полигонометрии и может производиться с помощью одного отвеса. Ориентирование маркшейдерских сетей осуществляется геометрическим и физическим (в частности, гироскопическим) способами.
Способ по прототипу, представляющий собой геометрический способ передачи дирекционного угла через один вертикальный ствол, включает следующие операции:
- проектирования, выполняемого с помощью двух отвесов, опущенных с поверхности в шахту;
- центрирования;
- примыкания, складываемого из геодезических измерений на поверхности и в шахте.
Ориентирование подземного горизонта в этом случае осуществляется посредством виртуальной плоскости, проходящей вертикально через опущенные отвесы. Плоскость служит передаточным звеном для определения дирекционного угла начальной стороны подземной полигонометрической сети с поверхности в шахту. В качестве инструмента решения задачи примыкания к отвесам на поверхности и в шахте используются соединительные геометрические фигуры: треугольники или четырехугольники.
Признаками прототипа, совпадающими с существенными признаками заявляемого способа, являются: монтаж оборудования на поверхности, проведение подготовительных работ, связанных с определением координат на поверхности (в надшахтном здании) и в околоствольных подземных выработках, измерение расстояний, горизонтальных и вертикальных углов и последующую камеральную обработку результатов измерений с помощью ЭВМ.
Недостатки прототипа заключаются в следующем:
1. Малое расстояния между отвесами, ограниченное как существующим диаметром ствола (крутонаклонной выработки), так и выбором места для беспрепятственного спуска отвесов, что ведет к снижению точности передачи дирекционного угла.
2. Высокая вероятность запутывания проволок отвесов во время спуска или их подъема из-за наличия в стволе различного оборудования (направляющих проводников, трубопроводов, канатов и др.), что снижает оперативность способа и увеличивает его трудоемкость.
3. Необходимость в постоянном «успокоении» отвесов из-за движения воздуха в стволе и влияние качания отвесов на точность ориентирования.
4. Осуществим только в вертикальном шахтном стволе (восстающей выработке) и не может быть реализован в крутонаклонных выработках из-за невозможности опускания отвесов.
5. Повышенная опасность выполнения работ на шахтном горизонте (при примыкании к отвесам) из-за вероятности падения посторонних предметов в ствол с поверхности или с вышележащих горизонтов с высоты от 60 м и более.
6. Раздельное выполнение горизонтальной и вертикальной соединительных съемок, увеличивающее трудоемкость и продолжительность всего комплекса работ вследствие монтажа и демонтажа оборудования при определении плановых координат X, У и дирекционного угла и последующего монтажа нового оборудования для передачи высотной отметки с поверхности в шахту.
7. Ограничение глубины передачи дирекционного угла до 500 м.
8. Необходимость проведения работ по способу-прототипу в относительно большой промежуток времени (до 1-2 суток), отрицательно сказывающаяся на производительности шахты по выдаче горной массы на поверхность.
Заявленное изобретение направлено на решение задачи передачи единой системы координат X, Y, Z и дирекционного угла с дневной поверхности в подземные выработки за один сканерный ход.
Технический результат заключается в повышении оперативности передачи заданных координат и дирекционного угла с дневной поверхности в подземные выработки при сохранении высокой точности.
Технический результат заявляемого изобретения достигается тем, что в способе соединительной съемки, включающем закрепление отражательных марок на поверхности и вдоль ствола (крутонаклонной выработке), а также под маркшейдерскими точками на заданных горизонтах, проведение измерений расстояний, горизонтальных и вертикальных углов с помощью лазерного сканера и последующую камеральную обработку полученных измерений. Согласно изобретению отличительными признаками является то, что в качестве оборудования, монтируемого на поверхности, используют лазерный сканер (лидар). Причем сначала расставляют отражательные марки на поверхности и в стволе (крутонаклонной выработке), затем закрепляют отражательные марки на заданных горизонтах под маркшейдерскими точками, далее закрепляют лазерный сканер под днищем клети и выполняют сканирование. Сканер закрепляют через технологическое отверстие под днищем клети, ось вращения сканирующей части располагают перпендикулярно подземным горным выработкам. Расстояние между сканерными позициями в стволе выбирают от 40 до 70 м в зависимости от условий окружающей среды в стволе, его технической характеристики и типа применяемых отражательных марок. Передачу плановых координат, дирекционного угла и высотной отметки в шахту осуществляют одновременно посредством лазерного сканирования за счет того, что сканер последовательно передает координаты от отражательных марок, находящихся на дневной поверхности и в стволе к маркам, закрепленным в подземных выработках.
Отличительные признаки, выявленные при сравнении заявленного способа с прототипами, подтверждают «новизну» заявленного технического решения.
Использование лазерного сканера позволяет значительно повысить оперативность и точность соединительной съемки. Закрепление сканера под клетью в технологическом отверстии дает возможность выполнять сканерную съемку заданного пространства как на поверхности, так и в стволе (крутонаклонной выработке). Применение отражательных марок позволяет осуществлять поэтапную ступенчатую передачу координат через отражательные марки, установленные на поверхности и в стволе, в подземную выработку на отражательные марки, закрепленные под маркшейдерскими точками. Использование шахтной клети позволяет осуществлять передвижение вмонтированного под ней лазерного сканера в любую точку сканирующей позиции. Фиксацию клети домкратом (т.е. создание клети неподвижности) достаточно выполнить с одной стороны на период передачи координат с поверхности в ствол для достижения необходимой точности лазерной съемки.
Одновременная передача дирекционного угла, плановых координат и высотной отметки с поверхности в шахту в несколько раз ускоряет и упрощает выполнение соединительной съемки через один вертикальный шахтный ствол или крутонаклонную восстающую выработку.
Известно достаточно широкое использование лазерных сканеров для поверхностных съемок рельефа местности, лесных массивов, существующих зданий и сооружений, различных конструкций, то есть получение изображений в условиях прямой видимости. Что касается использования лазерного сканирования для передачи плановых координат, отметки и дирекционного угла в горные выработки, то для специалиста в данной области решение подобной задачи явным образом не следует из существующего уровня данной техники. В этом случае нет прямой видимости и связи дневной поверхности с подземной горной выработкой, но имеется наличие стесненных условий работ как в вертикальных, так и в крутонаклонных выработках (например, лифтовых восстающих).
Преодоление этих «барьеров» в заявляемом способе достигается путем реализации ступенчатого (многоступенчатого) лазерного хода (вертикального, горизонтального, комбинированного), при котором координаты поэтапно передаются через отражательные марки, установленные на поверхности (в надшахтном здании), в стволе или в шахтных лифтовых (крутонаклонных) восстающих, а также в подземных околоствольных выработках. При этом за один сканерный ход в заявляемом способе возможна передача плановых координат X, У, дирекционного угла и высотной отметки с поверхности в шахту в системе координат, принятой на поверхности.
Таким образом, в процессе реализации заявляемого способа:
а) определяются плановые координаты X, Y одной и (или) более точек маркшейдерской подземной сети в системе координат, принятой на поверхности;
б) выполняется ориентирование подземных горизонтов (передача дирекционного угла с поверхности в шахту);
в) вычисляется абсолютная высотная отметка (координата Z) точек подземной маркшейдерской сети в горных выработках в единой с поверхностью системе координат.
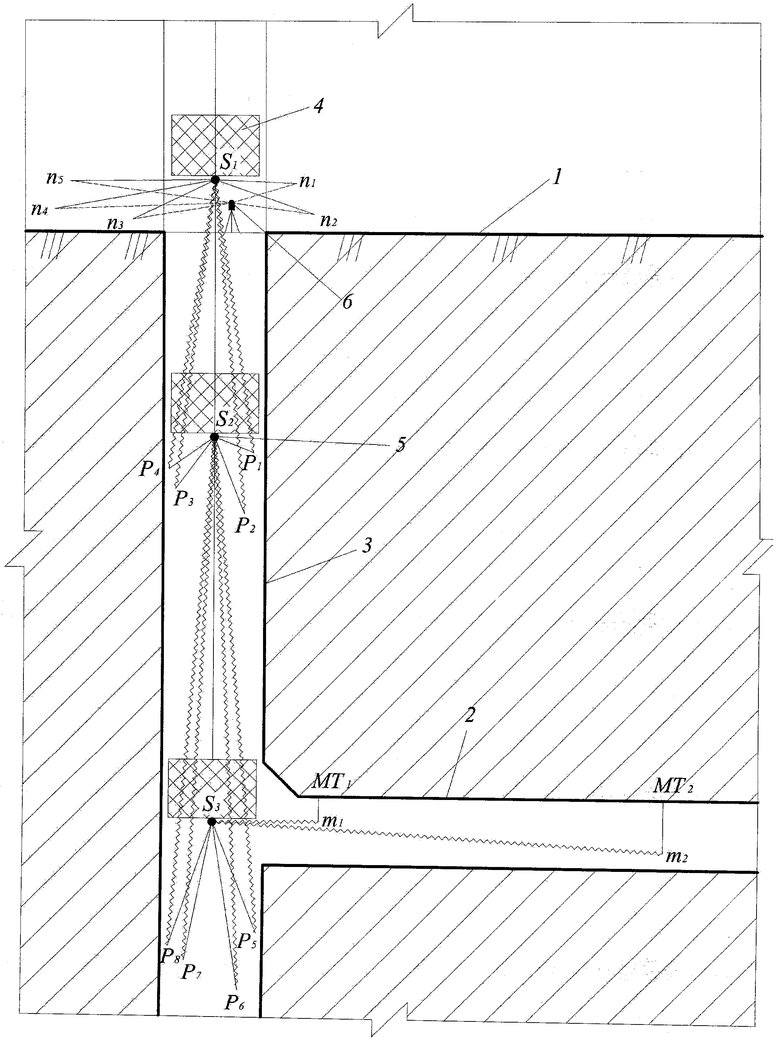
Изобретение поясняется чертежом, на котором приведена схема работ по предлагаемому способу соединительной съемки (передаче дирекционного угла, плановых координат и высотной отметки) лазерным сканером с поверхности (нулевой площадки) в подземную околоствольную горизонтальную выработку через вертикальный ствол.
Ниже приведены цифровые обозначения элементов чертежа:
1 - поверхность места работ (дневная поверхность);
2 - околоствольная горизонтальная подземная выработка;
3 - вертикальный ствол;
4 - шахтная клеть;
5 - лазерный сканер;
6 - электронный тахеометр;
S1 - исходная позиция шахтной клети на поверхности;
S2 - промежуточная позиция шахтной клети в стволе между поверхностью и заданным горизонтом (околоствольной выработкой);
S3 - позиции шахтной клети в стволе напротив одного из подземных горизонтов (околоствольной выработкой);
n1, n2, n3, n4, n5 - отражательные марки, закрепляемые на поверхности;
р1, р2, р3, р4, р5, p6, р7, р8 - отражательные марки, установленные в стволе;
m1, m2 - отражательные марки, закрепленные под маркшейдерскими точками (постоянными пунктами);
МТ1, МТ2 - маркшейдерские точки начальной стороны подземной маркшейдерской сети на горизонте.
Способ включает ряд рабочих этапов, выполняемых в определенном порядке и необходимых для получения планируемого результата, в том числе несколько позиций сканирования (в данном случае - три), количество которых зависит от глубины размещения горизонтальной выработки под землей.
Пример.
1. Подготовительный этап. На поверхности места работ, например в надшахтном здании вдоль вертикального ствола 3 (крутонаклонной выработки), а также в околоствольной горизонтальной подземной выработке 2 закрепляют отражательные марки n1-n5, р1-р8 и m1-m2. Затем определяют плановые координаты X, У отражательных марок n1-n5, например, с помощью электронного тахеометра 6 типа Nikon и их высотную отметку. Далее приподнимают шахтную клеть 4 на 1,0-1,5 м над поверхностью места работ 1, например, над уровнем головки рельс нулевой площадки (на чертеже не показано) и устанавливают лазерный сканер 5 (в данном случае, Riegl LMS Z420i) в технологическом отверстии под шахтной клетью 4.
2. Этап лазерного сканирования, выполняемый с последовательных позиций (в нашем примере - S1, S2, S3):
- 1-ая позиция сканирования (S1). Выполняется после закрепления лазерного сканера 5 под шахтной клетью 4 и приведения его в рабочее состояние «запуск», в результате чего осуществляется сканирование поверхности, то есть привязка к отражательным маркам n1-n5, верхней части вертикального ствола 3 и передача координат на марки р1-р4;
- 2-я позиция сканирования. Устанавливается путем переезда шахтной клети 4 по вертикальному стволу 3 и остановки ее на точке S2. Затем производится лазерная съемка, итогом которой является привязка к координатам отражательных марок p1-p4 и определение координат нижележащего куста марок-отражателей p5-p8,
- 3-я позиция клети для сканирования (S3). Выставляется таким образом, чтобы одновременно была прямая видимость с лазерного сканера 5 на нижележащие отражательные марки p5-p8 и отражательные марки, установленные в околоствольной горизонтальной подземной выработке 2, m1, m2. Далее запускается сканирование, выполняется лазерная съемка всех видимых участков горных выработок, в том числе и отражательных марок. На этой позиции в данном случае полевые работы заканчиваются.
3. Этап камеральной обработки - математической обработки данных лазерного сканирования. На этом завершающем этапе осуществляется передача полевых данных со сканера на компьютер и их последующая обработка, например, с помощью стандартного программного обеспечения, поставляемого с лазерным сканером Riscan Pro. Полученный таким образом дирекционный угол начальной стороны МТ1-МТ2 подземной маркшейдерской сети в околоствольной горизонтальной подземной выработке 2 отличается от контрольного, определенного методом гироскопического ориентирования, на 00°01'44”, и находится в пределах технологического допуска, что свидетельствует о высокой точности заявляемого способа.
Разность высотных отметок, определенных с помощью сканера и длинномера ДА-2 не превышает требований «Инструкции по производству маркшейдерских работ (РД 07 - 603 - 03). Серия 07. Выпуск 15 / Колл. Авт. - М.: ФГУП «Научно-технический центр по безопасности в промышленности Госгортехнадзора России», 2004. - 120 с.» и составляет 0,034 м, что также свидетельствует о высокой точности заявляемого способа.
Заявляемый способ позволяет при выполнении в полевых условиях работ в течение только одной смены решить задачу с достижением технического результата по одновременному определению и плановых координат начальных пунктов подземной маркшейдерской сети, и ее ориентированию, и передаче высотной отметки с поверхности в шахту.
Проведение полевых маркшейдерских работ в одну смену является существенным фактором, позволяющим избегать длительной «задолженности» ствола, сказывающимся на повышении производительности вертикального ствола по выдаче горной массы на поверхность.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи направления подземных горных выработок с горизонта на горизонт через соединительный канал | 1983 |
|
SU1138496A1 |
| СПОСОБ БЕЗОТВЕСНОЙ ГОРИЗОНТАЛЬНОЙ СОЕДИНИТЕЛЬНОЙ СЪЕМКИ ПОДЭТАЖНЫХ ГОРИЗОНТОВ С ПОМОЩЬЮ ЭЛЕКТРОННОГО ТАХЕОМЕТРА | 2020 |
|
RU2736698C1 |
| СПОСОБ ГОРИЗОНТАЛЬНОЙ СОЕДИНИТЕЛЬНОЙ СЪЕМКИ ПОДЭТАЖНЫХ ГОРИЗОНТОВ | 2018 |
|
RU2677089C1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ ПОДЗЕМНЫХ ГОРНЫХ ВЫРАБОТОК | 2017 |
|
RU2662468C1 |
| Устройство для проектирования дирекционного угла с дневной поверхности на подземный горизонт | 1984 |
|
SU1190196A1 |
| Способ передачи азимута и координат в подземные горные выработки | 1982 |
|
SU1128293A1 |
| Станция профилирования шахтных стволов | 2021 |
|
RU2763151C1 |
| Способ ориентирования подэтажной горной выработки через одну вертикальную выработку | 1987 |
|
SU1469354A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ КООРДИНАТ | 1994 |
|
RU2092793C1 |
| Способ передачи высотной отметки в шахту | 1990 |
|
SU1781542A1 |
Изобретение предназначено для горнодобывающей отрасли, в частности к способам производства горизонтальных и вертикальных соединительных съемок подземных горных выработок через вертикальные стволы или другие крутонаклонные выработки. Техническим результатом является повышение оперативности передачи заданных координат и дирекционного угла с дневной поверхности в подземные выработки при сохранении высокой точности. Способ соединительной съемки осуществляют следующим образом: за один ход сканирования ствола сверху вниз определяют а) плановые координаты X, Y одной и/или более точек маркшейдерской подземной сети в системе координат, принятой на поверхности; б) ориентирование подземных горизонтов - передача дирекционного угла с поверхности в шахту; в) абсолютную высотную отметку (координату Z) точек подземной маркшейдерской сети в горных выработках в единой с поверхностью системе координат. 1 ил.
Способ соединительной съемки, включающий монтаж оборудования на поверхности, проведение подготовительных работ, связанных с определением координат на поверхности и в околоствольных выработках, измерение расстояний, горизонтальных и вертикальных углов и последующую камеральную обработку результатов измерений с помощью ЭВМ, отличающийся тем, что в качестве оборудования, монтируемого на поверхности, используют лазерный сканер, который перед проведением измерений расстояний, горизонтальных и вертикальных углов закрепляют под днищем клети с обеспечением направления области сканирования вниз от клети и в стороны рассечки подземных горизонтов, в процессе проведения подготовительных работ, связанных с определением координат на поверхности, в стволе и в околоствольных выработках устанавливают отражательные марки, причем в околоствольных выработках отражательные марки размещают под маркшейдерскими точками, передачу дирекционного угла, плановых координат и высотной отметки в шахту осуществляют одновременно посредством лазерного сканирования за один сканерный ход вдоль ствола сверху вниз, производя последовательное поэтапное лазерное сканирование ствола сверху вниз, начиная с дневной поверхности и заканчивая заданным горизонтом в шахте, для этого лазерное сканирование на дневной поверхности производят, привязывая сканер к отражательным маркам, расположенным на поверхности и в стволе, передавая одновременно координаты на ближайшие отражательные марки, находящиеся в стволе, а далее производят последовательное поэтапное ступенчатое сканирование ствола, передавая координаты от верхних отражательных марок к нижним и к отражательным маркам, расположенным в околоствольных горизонтальных выработках, при этом перед запуском сканирования производят фиксацию клети с одной стороны посредством распирания ее домкратом.
| БОРЩ-КОМПАНИЕЦ В.И | |||
| Геодезия | |||
| Маркшейдерское дело | |||
| - М.: Недра, 1989, с.310-315 | |||
| Оптический способ профилирования шахт | 1959 |
|
SU127818A1 |
| Устройство контроля направления движения крепи в обводненном стволе | 1980 |
|
SU947420A1 |
| Способ определения направления скважин | 1987 |
|
SU1594268A1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ ПРОХОДЧЕСКОГО КОМПЛЕКСА ПРИ СТРОИТЕЛЬСТВЕ КРИВОЛИНЕЙНЫХ ТОННЕЛЕЙ | 2008 |
|
RU2385419C1 |
| Механизм раскрытия и поворота полуформ кокиля | 1981 |
|
SU952427A1 |

