Изобретение относится к области маркшейдерских измерений и может быть использовано для передачи ориентирных (дирекционных) углов в подземные горные выработки и тоннели метрополитенов.
Известно устройство для передачи ориентирного (дирекционного) угла в подземные горные выработки, называемое гирокомпас (Справочник по маркшейдерскому делу./Под ред. проф., д-ра техн. наук А.Н. Омельченко. - 4-е изд., перераб. и доп. – М., Недра, 1979. С. 72-86; 200-208). В маркшейдерской практике применяются одногироскопные маятниковые гирокомпасы МВТ2, МВТ4, МВБ4, главная ось которых совершает прецессионные колебания относительно положения равновесия, совпадающего при отсутствии моментов внешних сил с плоскостью астрономического меридиана в точке установки гирокомпаса. Дирекционный угол ориентируемой стороны определяется через поправку гирокомпаса, которая предварительно определяется на стороне с известным дирекционным углом, как разность определенного гирокомпасом гироскопического азимута и дирекционного угла этой исходной стороны. Затем определяют гироскопический азимут стороны подземной горной выработки и после введения в него полученной поправки гирокомпаса и поправки за сближение меридианов получают дирекционный угол ориентируемой стороны.
Недостатками является использование сложного и дорогостоящего оборудования, которым является гирокомпас, большой объем и многоструктурность организации полевых работ (определение поправки гирокомпаса через определение гироазимута, определение гироазимута подземной стороны), сложность, в методическом плане, проведения измерений по определению гироазимута.
Известно устройство передачи горизонтального направления с одного горизонта на другой (патент РФ №2152591, опубл. 10.07.2000 г.) для передачи ориентирного направления, содержащее передатчик направления, выполненного в виде матрицы источников света, а приемник направления снабжен телекамерой с матрицей прибора с зарядовой связью (ПЗС-матрицей), закрепленной на зрительной трубе. При этом, оптическая ось телекамеры совмещена с вертикальной осью вращения зрительной трубы.
К недостаткам относится сложность отдельных элементов, составляющих конструкцию устройства (световая матрица, ПЗС матрица в комплексе с телекамерой, устройство для считывания информации с ПЗС-матрицы) и сложность соблюдения соосности этих элементов в составе единой конструкции. Также недостатком является использование в световой матрице обычных электрических источников света, что делает невозможным использовать этого устройства в шахтных условиях, когда в стволе наблюдается активный капеж и турбулентное движение воздушного потока. Кроме того, использование в световой матрице обычных электрических источников света, существенно ограничивает глубину передачи ориентирного направления по шахтному стволу, в котором наблюдается небольшой капеж или он вовсе отсутствует, что также является недостатком этого устройства. Проблематично с помощью такого устройства передача плановых координат (х, у), которые всегда передаются параллельно с передачей ориентирного направления.
Известно поляриметрическое устройство для передачи горизонтального направления с одного горизонта на другой (авторское свидетельство СССР №1448825, опубл. 15.12.1991 г.), состоящее из передатчика направления и оптически связанного с ним приемника направления. Передатчик направления снабжен лазером, установленном на теодолите, и оптическими узлами (поляризационным фильтром, коллимирующей оптикой и поляризатором), создающими плоскополяризационный свет. Приемник направления, названный датчиком-индикатором, снабжен оптическими и электронными узлами (модулятором, генератором, анализатором, узкополосным интерференционным фильтром, фотоумножителем, фазочувствительным выпрямителем), позволяющими отсчитывать искомый угол между оптической осью зрительной трубы теодолита и плоскостью поляризации лазерного луча. При производстве ориентирования приемник направления (датчик-индикатор) располагают неподвижно ниже точек установки теодолита. После установки теодолита и датчика-индикатора измеряют на каждом горизонте направления на визирные цели и одновременно привязывают визирную ось зрительной трубы к опорной плоскости, задаваемой датчиком-индикатором. Из этих измерений вычисляют горизонтальные углы между визирными целями и опорной плоскостью и угол между визирными целями разных горизонтов.
Недостатком этого устройства является то, что оно содержит значительное количество сложных электронных и оптических узлов, каждый из которых либо сложно настраиваемые, если это электронные узлы, либо сложно юстируемые, если это оптические узлы. Не отъюстированные оптические узлы и не настроенные электронные узлы, составляющие единую измерительную систему, значительно снижают надежность определения положения плоскости поляризации и соответственно приводит к значительному увеличению погрешности этого определения. Кроме того, при переходе с одного ориентируемого горизонта на другой, в силу конструктивных особенностей устройства, необходимо каждый раз осуществлять операцию взаимного ориентирования между теодолитом, снабженным лазером и поляризатором, и датчиком-индикатором, в состав которого входит анализатор. Это приводит к нежелательному накоплению ошибок при последовательном ориентировании нескольких горизонтов и увеличению объема измерительных операций. К недостаткам относится необходимость сделать оптический канал, проходящий через корпус угломерного прибора (теодолита, электронного тахеометра) по оси его вращения, для беспрепятственного прохода лазерного луча от угломерного прибора до датчика-индикатора, располагаемого ниже угломерного прибора с установленным на нем лазером и поляризатором. Это повлечет существенное изменение конструкции существующих угломерных приборов. Также к недостаткам относится необходимость центрирования датчика-индикатора под лучом лазера, глядя в зрительную трубу, которая является системой оптического увеличения изображения и которая способна увеличить интенсивность лазерного излучения, что небезопасно для глаз оператора, осуществляющего эту операцию. Предусмотренный в данном устройстве поляризационный фильтр, уменьшающий интенсивность лазерного излучения, полностью опасность повреждения глаза не снимает, но при этом уменьшает глубину передачи ориентирного направления.
Известно устройство для передачи азимута по высоте (авторское свидетельство СССР №1830450, опубл. 30.07.1993 г.), принятое за прототип, использующее поляризованный свет для передачи горизонтальных направлений с поверхности земли в подземные горные выработки, состоящее из передатчика направления, индикатора опорного направления, угломерного прибора. Передатчик направления снабжен лазером, модулятором с управляющим генератором, коллимирующей системой и поляризатором, установленными в единый узел, который задает плоскость поляризации. Индикатор опорного направления жестко связан с теодолитом и содержит двухканальный анализатор, балансовый фотоприемник, два трансформатора, усилитель, синхронный детектор и нулевой индикатор. Передатчик направления устанавливается ниже теодолита, на котором закреплен индикатор опорного направления. В связи с этим, для попадания поляризованного луча лазера на анализатор необходимо устройство сквозного оптического канала, проходящего через весь корпус угломерного прибора по оси его вращения. С этой целью делается вертикальное отверстие в подставке теодолита, в его оси вращения, в корпусе зрительной трубы теодолита и ручке теодолита на которой закреплен индикатор опорного направления. Теодолит с индикатором опорного направления устанавливают на поверхности, а под ним (ниже ориентируемого горизонта или горизонтов) передатчик направления. Измеряют примычное направление на визирную цель на поверхности и одновременно привязывают визирную ось зрительной трубы к опорной плоскости, задаваемой индикатором опорного направления. Из этих измерений вычисляют горизонтальный угол между визирной целью с известным направлением на поверхности и опорной плоскостью. Затем теодолит с индикатором опорного направления переносят на ориентируемый горизонт и производят аналогичные измерения, откуда получают горизонтальный угол между визирной целью в подземной горной выработке ориентируемого горизонта и опорной плоскостью. И далее, сопоставляя проведенные измерения, можно получить горизонтальный угол между визирными целями на поверхности и ориентируемом горизонте. Если требуется произвести ориентировку следующего подземного горизонта, то переставляют теодолит с индикатором опорного направления на этот горизонт и повторяют все измерения и вычисления в соответствии с предыдущим горизонтом.
Недостатком устройства является то, что оно содержит значительное количество сложных электронных и оптических узлов, каждый из которых либо сложно настраиваемые, если это электронные узлы, либо сложно юстируемые, если это оптические узлы. Не отъюстированные оптические узлы и не настроенные электронные узлы, составляющие единую измерительную систему, значительно снижают надежность определения положения плоскости поляризации, что приводит к значительному увеличению погрешности этого определения. К недостаткам следует отнести установку и центрирование теодолита относительно лазерного луча, направляемого передатчиком направления, расположенного ниже установленного угломерного прибора. Из опыта работы с маркшейдерско-геодезическими приборами следует, что центрирование прибора в этой ситуации является крайне затруднительной процедурой, поскольку, перемещая прибор по горизонтальной площадке штатива до совпадения лазерного пятна с центром прибора, оператор вынужден будет заглядывать под нижнюю часть прибора. Далее, после совмещения лазерного пятна с центром теодолита, производится горизонтирование прибора подъемными винтами подставки прибора, в результате центр снова не будет совпадать с лазерным пятном. Потребуется корректировка центрирования, и оператор вновь вынужден будет заглядывать под низ прибора. Это одна сторона недостатка, другая сторона заключается в том, что при такой конструкции устройства для попадания поляризованного лазерного луча на анализатор необходимо обустройство сквозного оптического канала, проходящего через весь корпус угломерного прибора по оси его вращения. С этой целью делается вертикальное отверстие в подставке теодолита, в его оси вращения, в корпусе зрительной трубы теодолита и ручке теодолита, на которой закреплен индикатор опорного направления. Здесь особенно сложной и трудоемкой операцией является устроить отверстие в оси вращения теодолита без снижения работоспособности и точности его измерений. А если в качестве угломерного прибора, для автоматизации ряда измерительных процессов, использовать электронные или роботизированные тахеометры, отличающиеся высокой ценой, то их применение становится невозможным из-за таких изменений в конструкции.
Техническим результатом является упрощение конструкции, повышение надежности и точности измерений по передачи ориентирного направления и плановых координат (х, у) с поверхности на ориентируемый горизонт подземной горной выработки.
Технический результат достигается тем, в геометрическом центре верхнего торца цилиндрического корпуса источника излучения жестко закреплено кольцо, которое введено в зацепление с крюком, установленном в геометрическом центре крышки корпуса датчика опорного направления, в нижней части цилиндрического корпуса источника излучения установлен груз, а средней его части установлена колодка, на уровне которой в корпусе датчика опорного направления установлены винты в двух взаимно перпендикулярных плоскостях с возможностью фиксации и корректировки вертикальности цилиндрического корпуса источника излучения
Устройство поясняется следующими чертежами:
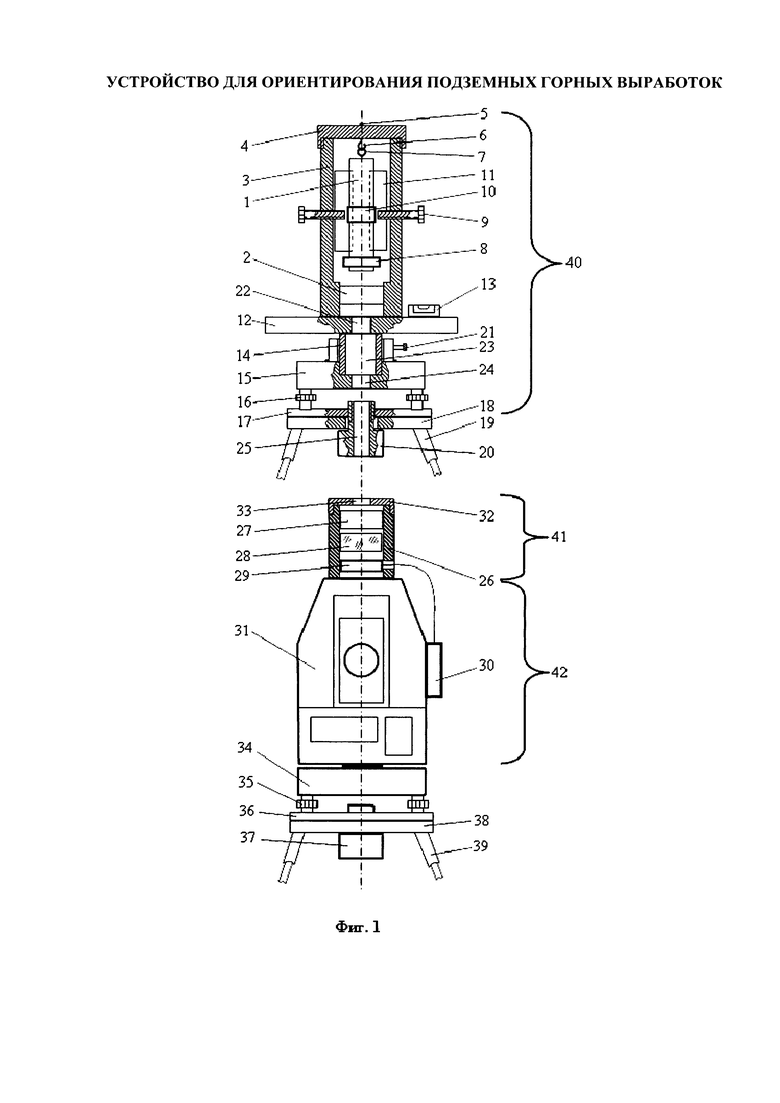
фиг. 1 - конструкция измерительной установки;
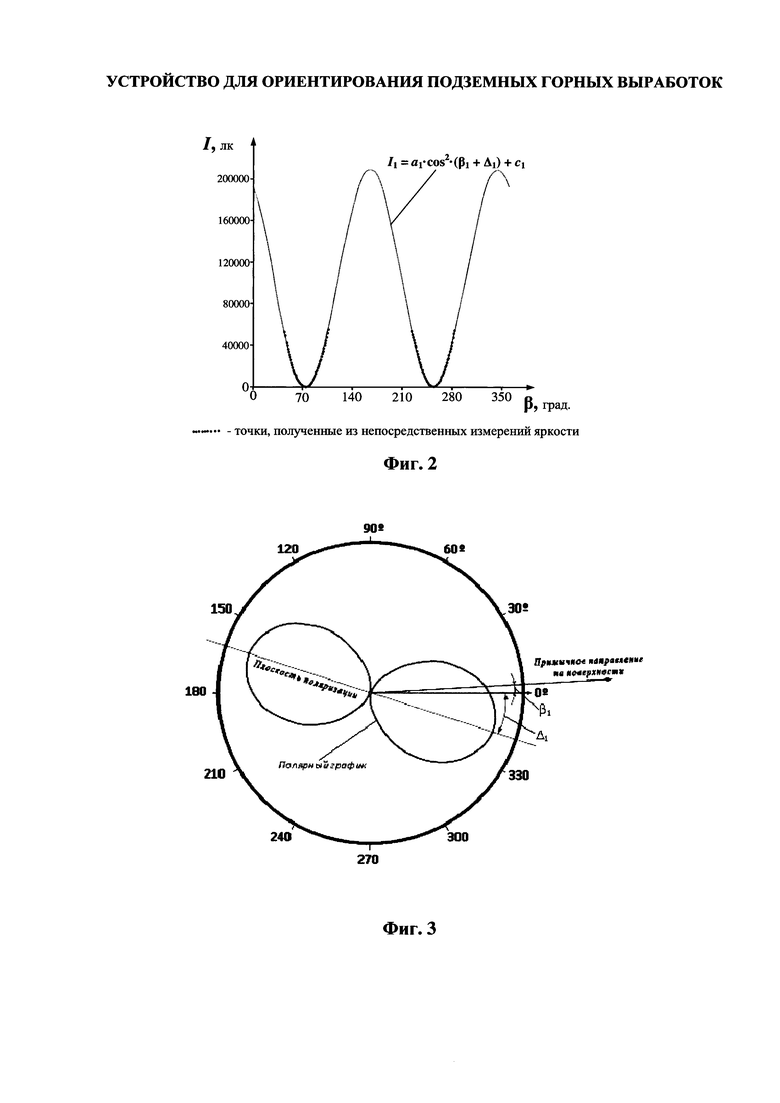
фиг. 2 - график зависимости фиксируемой яркости от положения датчика яркости относительно лимба углоизмерителя (теодолита, электронного тахеометра);
фиг. 3 - полярный график зависимости яркости от положения датчика яркости относительно лимба углоизмерителя (теодолита, электронного тахеометра), полученный на поверхности;
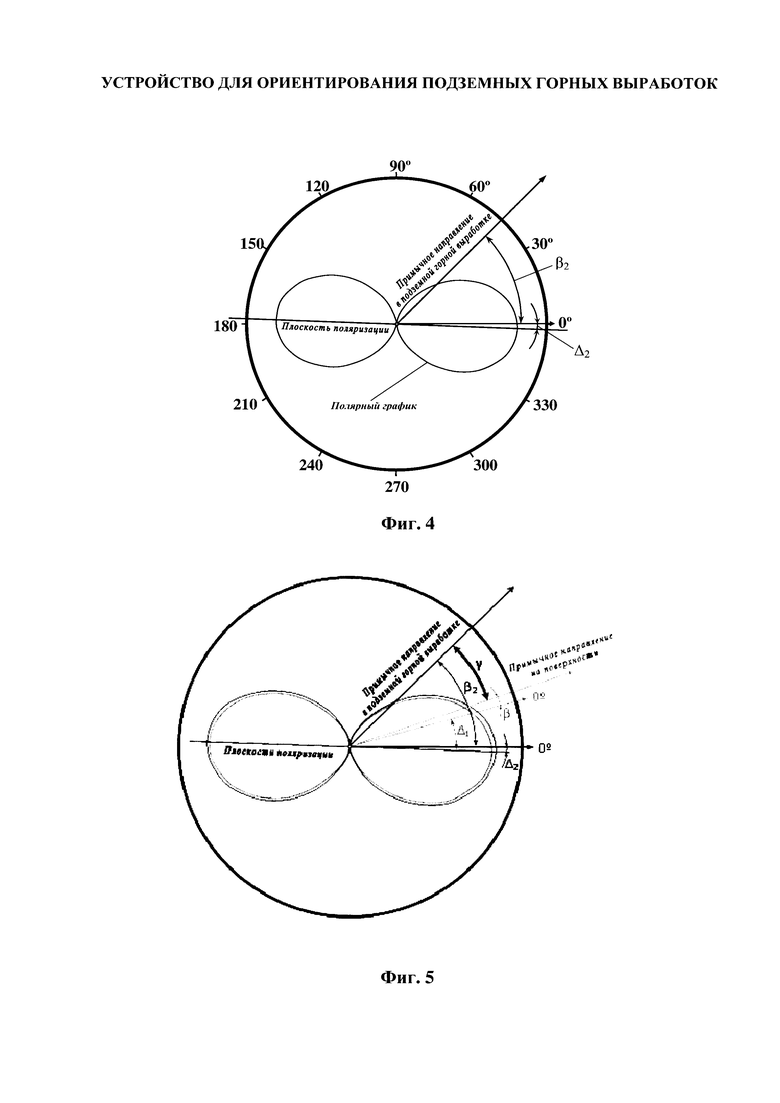
фиг. 4 - полярный график зависимости яркости от положения датчика яркости относительно лимба углоизмерителя (теодолита, электронного тахеометра), полученный на горизонте подземной горной выработки;
фиг. 5 - совмещенные по максимумам яркости полярные графики, полученные на поверхности и на горизонте подземной горной выработки, где:
1 - цилиндрический корпус источника излучения (лазера),
2 – поляризатор,
3 - корпус датчика опорного направления,
4 - крышка корпуса датчика опорного направления,
5 - центр крышки корпуса датчика опорного направления,
6 - крюк,
7 - кольцо,
8 - груз,
9 - винт,
10 - кольцевая колодка,
11 - прорези корпуса датчика опорного направления,
12 - круглая металлическая пластина,
13 - уровень,
14 - хвостовик,
15 - подставка,
16 - подъемный винт,
17 - трегер,
18 - горизонтальная площадка штатива под датчик опорного направления,
19 - штатив под датчик опорного направления,
20 - становой винт,
21 - зажимной винт,
22 - отверстие в круглой металлической пластине,
23 - отверстие в хвостовике,
24 - отверстие в подставке,
25 - отверстие в становом винте,
26 - корпус индикатора опорного направления,
27 – анализатор,
28 - световой фильтр,
29 - датчик яркости,
30 - управляющая плата,
31 - корпус углоизмерителя,
32 - крышка корпуса индикатора опорного направления,
33 - отверстие в крышке корпуса индикатора опорного направления,
34 - стандартная подставка,
35 - подъемные винты стандартной подставки,
36 - трегер стандартной подставки,
37 - стандартный становой винт,
38 - горизонтальная площадка штатива под углоизмеритель,
39 - штатив под углоизмеритель,
40 - датчик опорного направления,
41 - индикатор опорного направления,
42 - углоизмеритель.
Устройство содержит три основных модуля: датчик опорного направления 40, индикатор опорного направления 41 и углоизмеритель (теодолит, электронный тахеометр) 42 (фиг. 1). Датчик опорного направления 40 содержит когерентный источник излучения (лазер), заключенный в цилиндрический корпус 1, поляризатор 2, установленный на оси излучения лазера. Цилиндрический корпус лазера 1 и поляризатор 2 помещены в корпус датчика опорного направления 3, на который сверху навинчена крышка 4. В геометрическом центре верхней плоской части крышки 4 установлен центр 5, представляющий собой цилиндр ∅ 5.0 мм и высотой 3.0 мм, на верхнем торце которого просверлено на глубину 2.0 мм глухое отверстие ∅ 2.0 мм. В нижней плоской части крышки 4, в геометрическом центре, установлен крюк 6, на который подвешен цилиндрический корпус лазера 1 с помощью кольца 7, закрепленного в центре верхнего торца цилиндрического корпуса лазера 1. В противоположной (нижней) части цилиндрического корпуса лазера 1 закреплен груз 8, под воздействием которого цилиндрический корпус лазера 1, подвешенный шарнирно посредством кольца 7 к крюку 6, самоустанавливается в вертикальное положение. Для фиксации вертикального положения цилиндрического корпуса лазера 1 и принудительного изменения его положения, с целью корректировки вертикальности, служат четыре винта 9, расположенные в корпусе датчика опорного направления 3 попарно в двух взаимно перпендикулярных плоскостях с возможностью взаимодействовать с цилиндрическим корпусом лазера 1. Для чего на цилиндрическом корпусе лазера выполнена кольцевая колодка 10, через которую осуществляется взаимодействие с торцами винтов 9. В свободных от винтов 9 секторах корпуса датчика опорного направления 3, выполнены прорези 11 для визуального контроля процесса закрепления в вертикальном положении или принудительного изменения положения цилиндрического корпуса лазера 1 с помощью винтов 9. Корпус датчика опорного направления 3 жестко соединен с круглой металлической пластиной 12, на которой установлен уровень 13. Металлическая пластина 12 в нижней части имеет хвостовик 14 для соединения с подставкой 15, содержащей подъемные винты 16 и трегер 17. Последний служит для соединения подставки 15 с горизонтальной площадкой 18 штатива под датчик опорного направления 19 с помощью станового винта 20. Подставка 15 снабжена зажимным винтом 21 для фиксации датчика опорного направления 40 в определенном положении. В центре круглой металлической пластины 12 выполнено отверстие 22, в хвостовике 14 - отверстие 23, в подставке 15 - отверстие 24 и становом винте 20 - отверстие 25. Отверстия 22, 23, 24, 25 выполнены соосно с излучением лазера 1, и служат оптическим каналом для беспрепятственного прохода луча лазера. Индикатор опорного направления 41 содержит корпус 26, в котором на одной оси установлены анализатор 27, световой фильтр 28 и датчик яркости 29. Для записи результатов измерений датчиком яркости 29 силы поляризационного лазерного излучения служит управляющая плата 30, которая крепится к корпусу углоизмерителя (теодолиту, электронному тахеометру) 31. Кроме того, датчик яркости 29 используется для точного центрирования углоизмерителя 42 под лучом лазера. В крышке 32 корпуса индикатора опорного направления 26 соосно с отверстиями 22, 23, 24, 25 и осью вращения углоизмерителя (теодолита, электронного тахеометра) 42 выполнено отверстие 33 для прохода лазерного луча через анализатор 27 и световой фильтр 28 к датчику яркости 29. Индикатор опорного направления 41 крепится на корпусе углоизмерителя 31, что обеспечивает жесткую связь с алидадой углоизмерителя 42. Индикатор опорного направления 41 устанавливается с возможностью сниматься с углоизмерителя 42 и снова ставиться на то же место с помощью устройства (на чертежах не показано), обеспечивающего инвариантность его установки относительно корпуса углоизмерителя 31. Углоизмеритель (теодолит, электронный тахеометр) 42 устанавливается на стандартную подставку 34, имеющую подъемные винты 35 для горизонтирования углоизмерителя 42, и трегер 36 для соединения стандартной подставки 34, посредством стандартного станового винта 37, с горизонтальной площадкой 38 штатива под углоизмеритель 39.
Устройство работает следующим образом. Над устьем шахтного ствола, т.е. на поверхности, посредством станового винта 20 устанавливается и закрепляется на штативе 19 датчик опорного направления 40 (фиг. 1), при этом цилиндрический корпус лазера 1 должен быть полностью освобожден от закрепления винтами 9. Действуя подъемными винтами 16 подставки 15, датчик опорного направления 40 горизонтируется с помощью уровня 13. Затем, открутив крышку корпуса датчика опорного направления 4, снимают цилиндрический корпус лазера 1 с крюка 6 и на него прицепляют нить отвеса. Ставят на место крышку 4 и вывешивают вертикально отвес. В вывешенном состоянии отмечают на конце острия отвеса точку под штативом 19, соответствующую вертикальному положению нити отвеса. Действуя в обратном порядке, откручивают крышку 4, снимают нить отвеса с крюка 6 и на него вновь подвешивают за кольцо 7 цилиндрический корпус лазера 1 и прикручивают крышку 4 к корпусу датчика опорного направления 3. При этом цилиндрический корпус лазера 1 под действием груза 8 займет вертикальное положение. Действуя четырьмя винтами 9, фиксируют установившееся вертикальное положение цилиндрического корпуса лазера 1 в четырех взаимно перпендикулярных точках. В случае необходимости корректируется этими же винтами 9 положение луча лазера 1 до полного совпадения с отмеченной по острию отвеса точкой. В результате, лазерный луч, пройдя через поляризатор 2, сформирует неподвижную вертикальную плоскость поляризации с поверхности до ориентируемого горизонта подземной горной выработки. Под вертикально сформированным поляризационным лучом датчика опорного направления 40 устанавливается индикатор опорного направления 41, который жестко соединен через корпус углоизмерителя 31 с алидадой углоизмерителя (теодолита, электронного тахеометра) 42. В свою очередь, углоизмеритель 42 устанавливается в стандартную подставку 34, которая с помощью трегера 36 и стандартного станового винта 37 соединена с горизонтальной площадкой 38 штатива под углоизмеритель 39 (фиг. 1). Используя подъемные винты 35 и уровень углоизмерителя 40, которым оснащены все углоизмерительные приборы, центрируют и горизонтируют индикатор опорного направления 41 так, чтобы поляризованный лазерный луч попадал в центр чувствительной части датчика яркости 29. Для привязки плоскости поляризации к лимбу углоизмерителя (теодолита, электронного тахеометра) 42 производят следующие действия. По углоизмерителю (теодолиту или электронному тахеометру) 42 берутся и записываются отсчеты по лимбу горизонтального круга при дискретных поворотах алидады и соответствующая этим поворотам степень освещенности датчика яркости 29 с тем же порядковым номером. Такие измерения проводятся с шагом в один градус в интервалах примерно 60 градусов вблизи минимумов яркости, поскольку в остальных областях показания будут выходить за диапазон измерения стандартных датчиков яркости. Затем производятся измерения примычного направления на последний пункт подходного хода. Для чего на этот пункт наводятся зрительной трубой углоизмерителя (теодолита, электронного тахеометра) и берут отсчет по его лимбу. Измеряют расстояние до точки наведения лазерной рулеткой или дальномерной системой электронного тахеометра.
Данные о замерах яркости с карты памяти управляющей платы 30 и углоизмерителя (теодолита, электронного тахеометра) 42 переносят на компьютер и совмещают с порядковыми номерами замеров. В программной среде MathCAD, путем аппроксимации данных таких измерений, получают функциональную зависимость степени освещенности датчика яркости 29 от угла поворота углоизмерителя (теодолита, электронного тахеометра) 42 вида I1=α1⋅cos2(β1+Δ1)+c1 график (фиг. 2). В полученной функции параметр Δ1 характеризует разворот плоскости поляризации относительно лимба горизонтального круга углоизмерителя (теодолита, электронного тахеометра) 42 (фиг. 1). Он равен углу по лимбу углоизмерителя 42 между его началом градуировки (т.е. 0°) и отсчетом, соответствующим положению ближайшего максимума яркости, однозначно определяемым по полученной функции I1. Параметр β1 в полученной функции характеризует положение примычного направления относительно лимба горизонтального круга углоизмерителя (теодолита, электронного тахеометра) 42, которое определяется углом по лимбу между его началом градуировки (т.е. 0°) и отсчетом, соответствующем направлению примыкания. Если полученную аппроксимирующую функцию (фиг. 2) представить в виде полярного графика и совместить с лимбом горизонтального круга углоизмерителя (теодолита, электронного тахеометра) 42, на который нанести эти углы (Δ1 и β1), то получим геометрическую схему взаимного положения плоскости поляризации и примычного направления по лимбу горизонтального круга по измерениям на поверхности (фиг. 3). После измерения примычного направления углоизмеритель (теодолит, электронный тахеометр) 42 (фиг. 1) вынимается из стандартной подставки 34 и устанавливается на последний пункт подходного хода, а под лазерный луч датчика опорного направления 40 в эту стандартную подставку 34 устанавливается призма. Измеряется горизонтальный угол между предпоследним пунктом подходного хода, последним пунктом подходного хода и призмой под лазером датчика опорного направления 40. Из этих измерений определяют ориентирный (дирекционный) угол примычного направления. Используя этот ориентирный (дирекционный) угол и ранее измеренное расстояние между точкой установки датчика опорного направления 40 и последним (примычным) пунктом подходного хода, вычисляют плановые координаты (х, у) лазерного луча датчика опорного направления 40, под которым на данный момент была установлена призма.
Затем углоизмеритель (теодолит, электронный тахеометр) 40, с жестко соединенным с ним индикатором опорного направления 41, переносят на горизонт подземной горной выработки и устанавливают на штативе 39 под поляризованным лазерным лучом датчика опорного направления 40, неподвижно установленного на поверхности. При этом, центрирование и горизонтирование углоизмерителя (теодолита, электронного тахеометра) 40 осуществляется так же как на поверхности, т.е. с использованием уровня при углоизмерителе, датчика яркости 29, входящего в состав индикатора опорного направления 41, и стандартной подставки 34, соединенной со штативом под углоизмеритель 39 (фиг. 1). Измеряют примычное направление на пункт в подземной горной выработке β2 и расстояние до него. Затем, по аналогии с поверхностью, проводят измерения по привязке плоскости поляризации лазерного луча к лимбу углоизмерителя 42. Для чего по углоизмерителю (теодолиту, электронному тахеометру) 42, по аналогии с измерениями на поверхности, берутся и записываются отсчеты по лимбу горизонтального круга при дискретных поворотах алидады и соответствующая этим поворотам степень освещенности по датчику яркости 29 с тем же порядковым номером. По данным таких измерений получают инвариант функциональной зависимости степени освещенности датчика яркости 29 от угла поворота углоизмерителя 42. Используя полученную зависимость, определяют угол Δ2, являющийся углом по лимбу углоизмерителя 42 между его началом градуировки (т.е. 0°) и отсчетом, соответствующим положению ближайшего максимума яркости, однозначно определяемым по полученной функции. Если эту функцию также представить в виде полярного графика и совместить с лимбом горизонтального круга углоизмерителя 42, то получим геометрическую схему взаимного положения плоскости поляризации и примычного направления по лимбу углоизмерителя (теодолита, электронного тахеометра) 42, установленного на горизонте подземной горной выработки (фиг. 4).
Совместив геометрические схемы взаимного положения плоскости поляризации и примычных направлений, полученные на поверхности и на горизонте ориентируемой подземной горной выработки по линии плоскости поляризации (по линии максимумов яркости), получают угол между примычными направлениями на поверхности и в подземной горной выработке γ, вычисляемый по формуле γ=(Δ2+β2)-(Δ1+β1) (фиг. 5). Зная этот угол (γ) и ориентирный (дирекционный) угол примычного направления на поверхности, определяют ориентирный (дирекционный) угол примычного направления в подземной горной выработке. Плановые координаты лазерного луча (х, у), определенные из измерений на поверхности, в силу созданной датчиком опорного направления 40 вертикальности, будут теми же и на горизонте ориентирования подземной горной выработки. С учетом этого плановые координаты точки примыкания (х1, у1) определяют по ориентирному (дирекционному) углу примычного направления и измеренному расстоянию от точки установки углоизмерителя (теодолита, электронного тахеометра) 42 под лазерным лучом до точки примыкания.
После измерения примычного направления углоизмеритель (теодолит, электронный тахеометр) 42 вынимается из стандартной подставки 34 и устанавливается на точку примыкания в подземной горной выработке, а под лазерный луч датчика опорного направления 40, в освободившуюся стандартную подставку 34, устанавливается призма. Измеряется горизонтальный угол между второй точкой, заранее установленной в подземной горной выработке, точкой примыкания и призмой под лазером. Из этих измерений и ранее полученного ориентирного (дирекционного) угла примычного направления определяют ориентирный (дирекционный) угол стороны между точкой примыкания и заранее установленной второй точкой. Параллельно производят измерение длины этой стороны либо лазерной рулеткой, либо дальномерной системой электронного тахеометра. Отсюда получают плановые координаты (х2, у2) этой заранее установленной второй точки, образующей вместе с точкой примыкания сторону. На этом задача ориентирования (передача дирекционного угла) и центрирования (передача плановых координат) подземной горной выработки считается выполненной.
Преимуществом устройства является простота конструкции, расширение функциональных возможностей (дополнительно к ориентированию осуществить центрирование стороны подземной горной выработки), повышение надежности и точности измерений за счет самоустанавливающегося в вертикальное положение луча лазерного источника и использования специального алгоритма синхронизации угловых измерений с измерениями датчика яркости для определения ориентирного направления плоскости поляризации.
Устройство применяется для передачи ориентирного направления (дирекционного угла) и плановых координат с поверхности в подземные горные выработки или подземные сооружения (тоннели, коллекторы, подземные станции метрополитенов и др.), а также на верхние этажи построенных и строящихся высотных зданий.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ БЕЗОТВЕСНОЙ ГОРИЗОНТАЛЬНОЙ СОЕДИНИТЕЛЬНОЙ СЪЕМКИ ПОДЭТАЖНЫХ ГОРИЗОНТОВ С ПОМОЩЬЮ ЭЛЕКТРОННОГО ТАХЕОМЕТРА | 2020 |
|
RU2736698C1 |
| СПОСОБ ГОРИЗОНТАЛЬНОЙ СОЕДИНИТЕЛЬНОЙ СЪЕМКИ ПОДЭТАЖНЫХ ГОРИЗОНТОВ | 2018 |
|
RU2677089C1 |
| Устройство для передачи направления подземных горных выработок с горизонта на горизонт через соединительный канал | 1983 |
|
SU1138496A1 |
| Устройство для ориентирования наклонных горных выработок | 1960 |
|
SU141321A1 |
| УСТРОЙСТВО ДЛЯ ГИРОСКОПИЧЕСКИХ ИЗМЕРЕНИЙ | 1996 |
|
RU2124183C1 |
| Способ определения координат точек объекта | 2020 |
|
RU2740686C1 |
| Способ съемки крутопадающих горных выработок | 1957 |
|
SU114108A1 |
| Способ прямой векторной засечки | 2020 |
|
RU2735311C1 |
| ПОЛЯРИМЕТРИЧЕСКАЯ СИСТЕМА ИЗМЕРЕНИЯ ВЗАИМНОГО РАЗВОРОТА | 1992 |
|
RU2047836C1 |
| Способ измерения угла между створом отвесов и направлением первого стана в шахте | 1946 |
|
SU70202A1 |
Изобретение относится к области маркшейдерских измерений и может быть использовано для передачи ориентирных (дирекционных) углов в подземные горные выработки и тоннели метрополитенов. Устройство включает угломерный прибор и последовательно расположение по оси его вращения лазер, поляризатор, анализатор. Лазер с поляризатором закреплен независимо от угломерного прибора на поверхности, создавая неподвижную плоскость поляризации между поверхностью и ориентируемыми горизонтами. Анализатор жестко связан с угломерным прибором и снабжен датчиком яркости, с помощью которого осуществляется фиксация изменения яркости поляризованного луча лазера при дискретных поворотах угломерного прибора для вывода функциональной зависимости яркости от угла поворота, максимальное значение которой определяет положение плоскости поляризации по лимбу угломерного прибора, последовательно устанавливаемого и центрируемого под поляризованным лучом лазера на поверхности и ориентируемых горизонтах. Техническим результатом изобретения является упрощение конструкции, повышение надежности и точности измерений. 5 ил.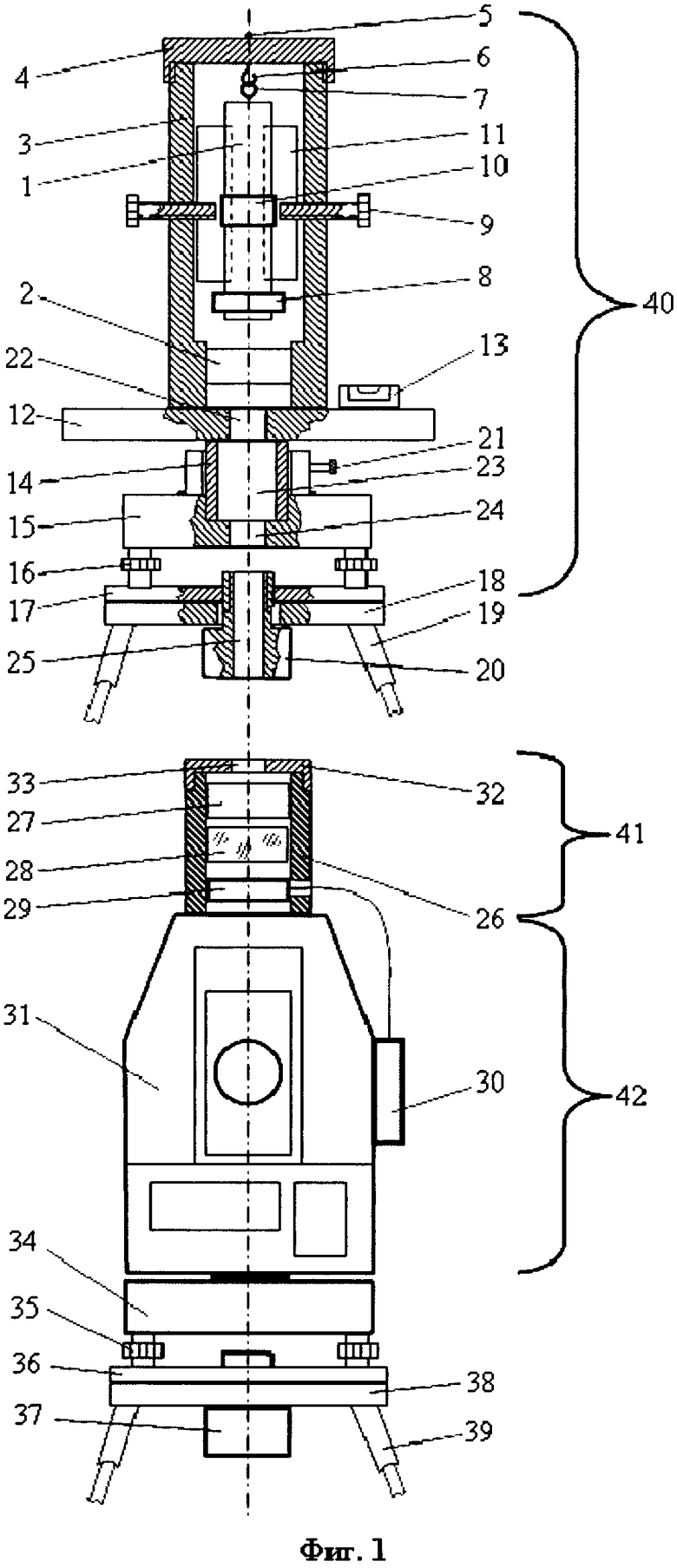
Устройство для ориентирования подземных горных выработок, содержащее датчик опорного направления с источником линейно-поляризованного излучения, углоизмеритель с алидадой, индикатор опорного направления с анализатором, жестко связанного с алидадой углоизмерителя, отличающееся тем, что в геометрическом центре верхнего торца цилиндрического корпуса источника излучения жестко закреплено кольцо, которое введено в зацепление с крюком, установленном в геометрическом центре крышки корпуса датчика опорного направления, в нижней части цилиндрического корпуса источника излучения установлен груз, а в средней его части установлена колодка, на уровне которой в корпусе датчика опорного направления установлены винты в двух взаимно перпендикулярных плоскостях с возможностью фиксации и корректировки вертикальности цилиндрического корпуса источника излучения.
| УСТРОЙСТВО ДЛЯ СЪЕМКИ СЕЧЕНИЙ ГОРНЫХ КАМЕРНЫХ ВЫРАБОТОК | 2014 |
|
RU2575141C1 |
| СПОСОБ ПРОВЕДЕНИЯ ВСТРЕЧНЫХ ВЫРАБОТОК ПРИ ИХ СБОЙКЕ | 2013 |
|
RU2527955C1 |
| Устройство для передачи направления подземных горных выработок с горизонта на горизонт через соединительный канал | 1983 |
|
SU1138496A1 |
| Способ ориентирования шахты теодолитом ТГ-3 | 1956 |
|
SU108671A1 |
| Способ ориентирования подэтажной горной выработки через одну вертикальную выработку | 1987 |
|
SU1469354A1 |
| CN 106679614 A, 17.05.2017. | |||

