Антиперспирантные и дезодорирующие составы были разработаны с некоторым сортаментом разных продуктовых форм. Одной из них является так называемый «стержень», который обычно является бруском предположительно твердого сплошного материала, удерживаемым внутри распределительного контейнера и который сохраняет свою конструктивную целостность и форму при применении. Когда часть стержня протягивается по поверхности кожи, пленка состава стержня переносится на поверхность кожи. Продуктивность дезодорирующего стержня описывает вес, потерянный на поверхности от типичного применения дезодорирующего стержня. Это свойство и другие реологические свойства учитываются при разработке новых стержневых дезодорирующих изделий. Поэтому желательно иметь управляемые способ и устройство для измерения таких свойств.
В варианте осуществления настоящего изобретения раскрыт способ измерения отслаивания материала, согласно которому:
подготавливают образец шерстяной ткани заданного размера;
прикладывают начальный вес материала к образцу шерстяной ткани;
прикрепляют первый конец шерстяной ткани к стационарному держателю, а второй конец - к подвижной платформе подложки;
осуществляют растяжение перемещая подвижную платформу подложки на заданное расстояние и возвращая, а затем перемещая ее в противоположном направлении на такое же заданное расстояние и возвращая за 1 растяжение;
повторяют растяжение заданное число растяжений;
измеряют вес образца шерстяной ткани и материала после заданного числа растяжений;
определяют потерю веса материала у образца шерстяной ткани, которая измеряется количеством потери материала с образца, деленным на начальный вес материала после заданного числа растяжений.
Предпочтительно, образец шерстяной ткани имеет размер 7,6 см × 15,2 см, а начальным весом материала является 0,65±0,03 г.
Предпочтительно, заданное расстояние составляет 6 см.
Предпочтительно, заданное число растяжений составляет 50 и, по выбору, одним или более из 150 и 450.
Далее будет описан предложенный способ со ссылкой на прилагаемые чертежи, где возможно, одинаковые номера ссылочных позиций будут использоваться на всех чертежах для обозначения идентичных или подобных частей.
Фиг. 1 иллюстрирует пример системы для измерения продуктивности, статического трения, кинетического трения и их комбинаций.
Фиг. 2 иллюстрирует пример устройства для измерения продуктивности, статического трения, кинетического трения и их комбинаций.
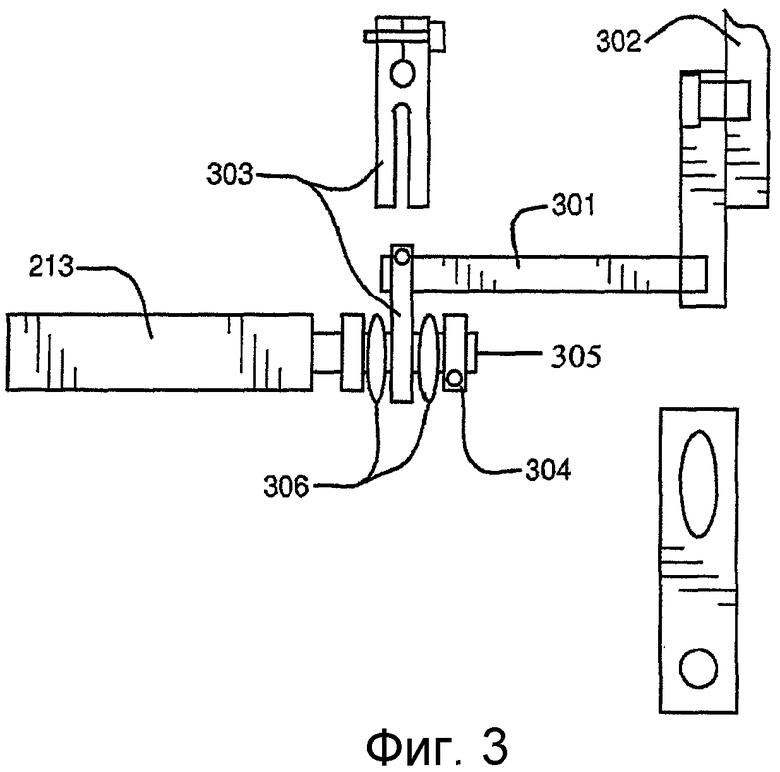
Фиг. 3 иллюстрирует пример датчика трения.
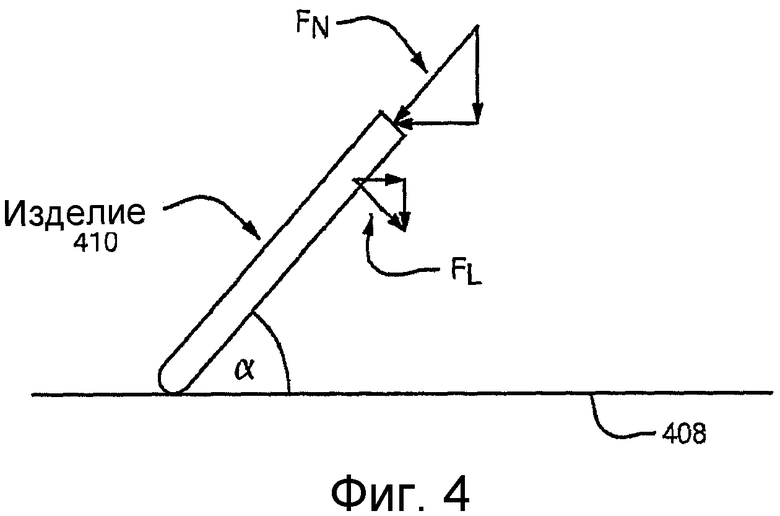
Фиг. 4 иллюстрирует модель для определения коэффициента трения.
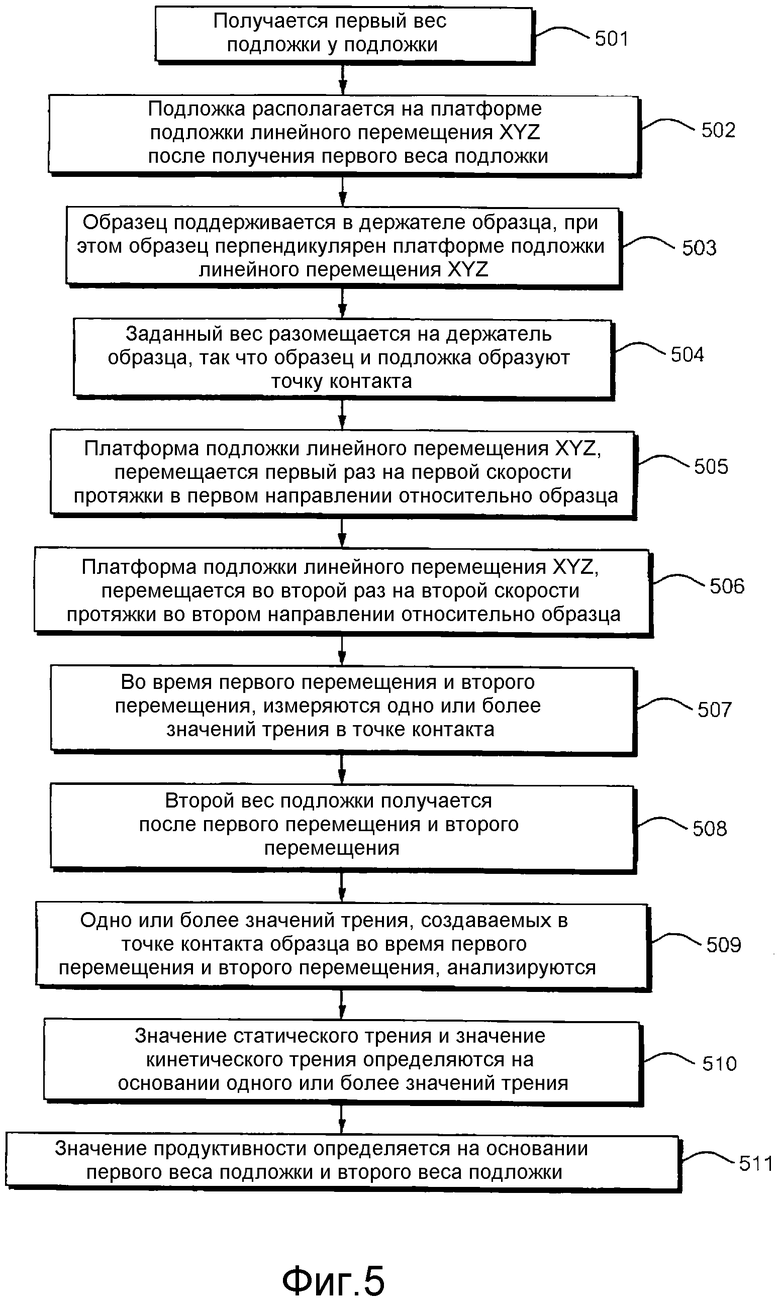
Фиг. 5 иллюстрирует пример способа с использованием систем, описанных в материалах настоящей заявки.
Во всем описании диапазоны используются в качестве условного обозначения для описания каждого и всякого значения, которое находится в пределах диапазона. Любое значение в пределах диапазона может быть выбрано в качестве конца диапазона. Кроме того, все ссылки, упомянутые в материалах настоящей заявки, целиком включены в настоящее описание посредством ссылки. В случае конфликта между определением в настоящем описании и определением в ссылке настоящее описание отменяет предыдущие определения.
Согласно настоящему изобретению созданы системы и способы для измерения продуктивности, статического трения, кинетического трения или их комбинации. Фиг. 1 иллюстрирует пример системы 100, включающей в себя устройство 107 прибора испытаний на продуктивное трение, весы 106 и контроллер 101, имеющий машиночитаемую управляющую программу 108, содержащую в себе выполняемые команды. Устройство 107 для измерения продуктивности, статического трения, кинетического трения или их комбинации может быть функционально присоединено к контроллеру 101 через блок 102 управления электроприводом. Компоненты примера системы 100, проиллюстрированной на фиг. 1, дополнительно описаны ниже.
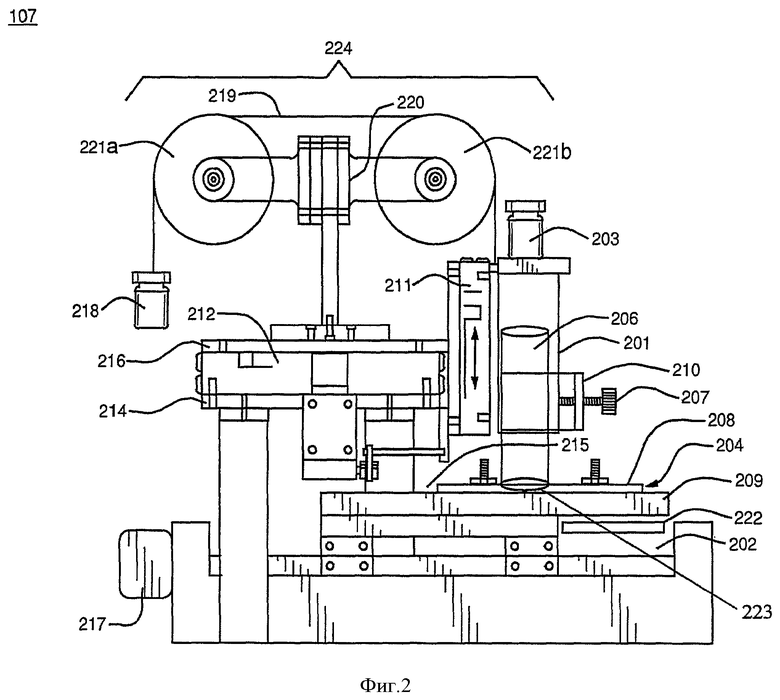
Фиг. 2 иллюстрирует пример устройства 107 продуктивного трения. Устройство 107 системы 100 включает в себя: по меньшей мере одну подложку 204, расположенную на платформе 209 подложки линейного перемещения XYZ; держатель 201 образца; силовое устройство 224; стол 211 на подшипниках качения; стационарный стол 212 на подшипниках качения; и датчик 213 трения. Держатель 201 образца поддерживает образец 206, так что образец 206 может быть расположен перпендикулярно платформе 209 подложки линейного перемещения XYZ, или так что образец 206 перпендикулярно соприкасается с подложкой 204. Держатель 201 образца также может поддерживать образец 206 из условия, чтобы образец 206 соприкасался с подложкой 204 под углом, который является меньшим, чем 90°.
Образец 206 может быть любым образцом, который может анализироваться по продуктивности, статическому трению, кинетическому трению или их комбинации. Примеры образцов включают в себя, но или не ограничиваются, дезодоранты (например, дезодорирующий стержень), антиперспиранты или их комбинации. Образец 206 может быть прикреплен к держателю 201 образца с использованием винта 207, такого как винт с накатанной головкой, или другого средства для присоединений, такого как зажим или другое средство, которое может закреплять образец 206 и содействовать в ориентации его выравнивания. Зажим 210 образца может принимать корпуса 206 дезодорирующих стержней или другие типы контейнеров образцов различных размеров и конфигураций.
Подложка 204 может включать в себя материалы, такие как высококачественная бумага копировальных устройств, наждачная бумага (в различных степенях абразивного изнашивания), или может использоваться ткань. В некоторых вариантах осуществления удобно нарезать подложку заблаговременно в большом количестве, например, на полосы приблизительно 13×25 сантиметров, и одна полоса может зажиматься на месте перед испытанием.
На фиг.2 платформа 209 подложки линейного перемещения XYZ функционирует для перемещения платформы подложки линейного перемещения XYZ на первой скорости протяжки в первом направлении и на второй скорости протяжки во втором направлении относительно образца 206. Платформа 209 подложки линейного перемещения XYZ функционально присоединена к винтовому столу 202 с механической подачей. Винтовой стол 202 с механической подачей может приводиться в движением блоком 217 привода с электронным управлением. Блок 217 привода с электронным управлением может действовать в автоматическом режиме или ручном режиме. В автоматическом режиме блок 217 привода с электронным управлением может включать в себя регулирование скорости с широтно-импульсной модуляцией, с тем, чтобы достигать точного регулирования скорости вплоть до состояния высокого крутящего момента с нулевой скоростью. Электродвигатель 103 может дистанционно приводиться в движение сигналом скорости, выдаваемым контроллером 101, например, по каналу аналогового вывода контроллера. Это предоставляет возможность точного регулирования по скорости и расстоянию протяжки. В ручном режиме, оператор манипулирует платформой 209 подложки линейного перемещения XYZ с использованием элементов управления блока 217 привода с электронным управлением. Неограничивающим примером блока 217 привода с электронным управлением является блок привода Motamatic.
В одном из вариантов осуществления, платформа 209 подложки линейного перемещения XYZ также включает в себя нагреватель 222. В некоторых вариантах осуществления, нагреватель 222 может нагревать подложку 204 до температуры от приблизительно 26,7°C до приблизительно 43,3°C (приблизительно от 80°F до приблизительно 110°F), от приблизительно 32,2°C до приблизительно 43,3°C (от приблизительно 90°F до приблизительно 110°F), от приблизительно 32,2°C до приблизительно 37,8°C (от приблизительно 90°F до приблизительно 100°F), от приблизительно 35°C до приблизительно 37,8°C (от приблизительно 95°F до приблизительно 100°F), от приблизительно 36,7°C до приблизительно 37,8°C (от приблизительно 98°F до приблизительно 100°F), от 36,7°C до приблизительно 37,2°C (от приблизительно 98°F до приблизительно 99°F) или приблизительно 37°C (приблизительно 98,6°F).
Стол 211 на подшипниках качения присоединен к держателю 201 образца, давая возможность перемещения «без трения» образца 206, поддерживаемого держателем 201 образца. В некоторых вариантах осуществления, стол 211 на подшипниках качения расположен перпендикулярно платформе 209 подложки линейного перемещения XYZ. В других вариантах осуществления, стол 211 на подшипниках качения расположен вертикально. Стол 211 на подшипниках качения функционирует для создания оси давления при испытании и дает возможность перемещения вверх и вниз держателя 201 образца. Вес держателя 201 образца может встречно уравновешиваться до нуля силой с помощью противовеса 218 через стойку 220 шкива и шнур 219. Дополнительный вес(а) 203 помещается поверх держателя 201 образца для определения величины контактного усилия (которое прижимает образец к поверхности).
Стационарный стол 212 на подшипниках качения расположен параллельно платформе 209 подложки линейного перемещения XYZ. В некоторых вариантах осуществления, стационарный стол 212 на подшипниках качения является горизонтальным столом на подшипниках качения. В других вариантах осуществления, стационарный стол 212 на подшипниках качения расположен на внутренних направляющих, опирающихся на множество шарикоподшипников. Плита 214 стационарного стола на подшипниках качения является частью основания 216 для устройства 107 и не перемещается, обеспечивая измерение силы по отношению к неподвижной опоре.
Датчик 213 трения функционально присоединен к держателю 201 образца и стационарному столу 212 на подшипниках качения. В одном из вариантов осуществления, датчик 213 трения может быть установлен над платформой 209 линейного перемещения на кронштейне, прикрепленном к плите 214 стационарного стола на подшипниках качения. Поперечное трение передается на датчик 213 трения через рычажный механизм 215, соединяющий устройство. Этот рычажный механизм 215 может быть ориентирован настолько возможно близко к плоскости действующего трения. Измерение трения в точке 223 контакта образца требует, чтобы другие точки трения в машине были устранены или по меньшей мере сведены до минимума насколько возможно. Для достижения этого стационарный стол 212 на подшипниках качения полностью поддерживает верхнюю сборку. Все из компонентов устройства могут быть объединены на поддерживающей конструкции 216 (показанной в качестве лежащей на боку T в черном цвете). Она «катается» как одна часть на стационарном столе 212 на подшипниках качения.
Датчик 213 трения может быть любым датчиком, который может использоваться для детектирования и измерения трения. Перенос поверхностного трения на чувствительный элемент может выполняться механическим соединением от держателя 201 образца до датчика 213 трения. На фиг. 3 датчик 213 трения функционально присоединен к рычажному механизму 215, содержащему тягу 301 преобразователя и вилку 303 рычажной передачи. Тяга 301 преобразователя соединяет фиксированную силу в точке 223 контакта образца (фиг. 2) с патрона 302 каретки с вилкой 303 рычажной передачи. Вилка 303 рычажной передачи может быть расположена между парой кольцевых демпферов 306, а пара кольцевых демпферов может быть расположена между парой стопоров 304 элементов. Вилка 303 рычажной передачи подвешена между двумя стопорами 304 элементов, прикрепленными к зонду 305 датчика трения. Когда вилка 303 рычажной передачи нажимает на стопор, величина ее силы передается на датчик 213 трения. Физический контакт на стопорах намеренно демпфируется резиновыми кольцевыми демпферами 306, которые содействуют сглаживанию упругих затухающих колебаний, которые являются следствием резких изменений направления силы.
На фиг. 2, устройство 107 может включать в себя силовое устройство 224, включающее в себя заданный вес 203, противовес 218, шнур 219, стойку 220 шкива и два шкива 221a и 221b. Силовое устройство 224 функционирует для помещения заданного веса 203 на держатель 201 образца, где заданный вес 203 определяет контактное усилие, прикладываемое образцом 206 к подложке 204. Заданный вес 203 и противовес 218 могут быть соединены шнуром 219. В некоторых вариантах осуществления, стационарный стол 212 на подшипниках качения поддерживает силовое устройство 224.
На фиг. 1 и фиг. 2 система 100 также может включать в себя контроллер 101 для контроля и управления требуемыми переменными величинами. Любой тип контроллера может использоваться для управления системой. В контроллере установлена плата многофункционального аналого-цифрового преобразователя (DAQ), предоставляющего системе необходимый интерфейс с различными компонентами. Контроллер 101 функционально присоединен к платформе 209 подложки линейного перемещения XYZ, весам 106 и датчику 213 трения и сконфигурирован для приведения в исполнение машиночитаемой управляющей программы 108. Контроллер 101 предназначен для приведения в исполнение машиночитаемой управляющей программы 108, чтобы выполнять различные функции. В некоторых вариантах осуществления, функции включают в себя, но не в качестве ограничения, подключение весов 106 для получения первого веса подложки до перемещения платформы 209 подложки линейного перемещения XYZ и второго веса подложки после перемещения платформы 209 подложки линейного перемещения XYZ. Контроллер 101 также подключает платформу 209 подложки линейного перемещения XYZ для перемещения платформы 209 подложки линейного перемещения XYZ на первой скорости протяжки в первом направлении и на второй скорости протяжки во втором направлении относительно образца 206. Контроллер 101 также анализирует одно или более значений трения, измеренных датчиком трения, сформированных в точке 223 контакта образца, расположенной между образцом 206 и подложкой 204, во время перемещения платформы 209 подложки линейного перемещения XYZ. Контроллер 101 дополнительно выполнен с возможностью определения значения статического трения и значения кинетического трения на основании одного или более значений или определения значения продуктивности на основании первого веса подложки и второго веса подложки.
Система по настоящему изобретению также может быть предназначена для приведения в исполнение машиночитаемой управляющей программы, содержащей в себе команды исполняемой программы для выполнения многообразия функций. В некоторых вариантах осуществления, система предназначена для выполнения способов для измерения одного или более из следующего: продуктивности, статического трения и кинетического трения. Один из вариантов осуществления для измерения одного или более из следующего: продуктивности, статического трения и кинетического трения, проиллюстрирован на фиг. 5. На этапе 501, получается первый вес подложки. В одном из вариантов осуществления, чистый кусок подложки 204 помещается на весы 106, чтобы взвешиваться. Непрерывное показание с весов 106 отображается в окне, в то время как весы 106 нагружены. Как только отмечено стабильное показание, оно может «фиксироваться» нажатием на экранную кнопку, обозначенную «Получить вес». Подложка 204 затем снимается с весов 106 и прикрепляется к платформе 209 линейного перемещения XYZ с помощью зажимных пластин 208 на продольных сторонах.
На этапе 502, подложка располагается на платформе подложки линейного перемещения XYZ после получения первого веса подложки. На этапе 503, образец поддерживается в держателе образца, при этом, образец перпендикулярен платформе подложки линейного перемещения XYZ. На этапе 504, заданный вес помещается на держатель образца, так что образец и подложка образуют точку контакта.
На этапе 505, платформа 209 подложки линейного перемещения XYZ, перемещается первый раз на первой скорости протяжки в первом направлении относительно образца. На этапе 506, платформа подложки линейного перемещения XYZ, перемещается второй раз на второй скорости протяжки во втором направлении относительно образца. В одном из вариантов осуществления, контроллер 101 начинает последовательность операций протяжки, когда оператором дано разрешение. В другом варианте осуществления, контроллер 100 начинает последовательность операций протяжки на основании автоматического процесса, где разрешение не требуется, но, взамен, последовательность операций начинается, когда образец 206 и подложка 204 закреплены. Этапы 505 и 506 протяжки выполняются винтовым столом с механической подачей, который приводится в движение блоком привода с электронным управлением. Блок привода с электронным управлением может иметь регулирование скорости с широтной импульсной модуляцией. В некоторых вариантах осуществления, этап первого перемещения и этап второго перемещения повторяются заданное количество раз. В некоторых вариантах осуществления, этап первого перемещения и этап второго перемещения выполняются 1-50, 1-40, 1-30, 1-20, 1-10, 5-10, 5-15, 5 или 10 раз.
Расстояние перемещения в первом направлении или втором направлении платформой 209 подложки линейного перемещения XYZ на этапах 505 и 506 протяжки может меняться. В некоторых вариантах осуществления расстояние в первом направлении или втором направлении составляет от приблизительно 5 до приблизительно 50 см, от приблизительно 5 до приблизительно 40 см, от приблизительно 5 до приблизительно 30 см, от приблизительно 5 до приблизительно 20 см, от приблизительно 5 до приблизительно 10 см. В некоторых вариантах осуществления, расстоянием первого направления или второго направления является приблизительно 5, приблизительно 10, приблизительно 15, приблизительно 20, приблизительно 25, приблизительно 30, приблизительно 35, приблизительно 40 или приблизительно 50 см.
На этапе 507, во время первого перемещения и второго перемещения, измеряются одно или более значений трения в точке контакта. В некоторых вариантах осуществления, поперечное трение может измеряться непосредственно, в то время как платформа 209 подложки линейного перемещения XYZ протягивается в первом и втором направлениях. В одном из вариантов осуществления, каждый выходной сигнал из датчика 213 трения может отображаться в реальном времени в контроллере 101, в то время как продолжается протяжка.
На этапе 508, второй вес подложки получается после первого перемещения и второго перемещения. Когда требуемое число протяжек осуществлено, компьютер может повторно отображать окно «Получить вес». Напитанный материал, то есть подложка 204, может сниматься с нижней платформы и помещаться обратно на весы 106, чтобы взвешиваться после. Продуктивность определяется по изменению веса подложки 204.
На этапе 509, анализируются одно или более значений трения, сформированных в точке контакта образца во время этапа первого перемещения и этапа второго перемещения. На этапе 510, определяются значение статического трения и значение кинетического трения на основании одного или более значений трения. В некоторых вариантах осуществления, значения трения определяются с использованием формулы, описанной в материалах настоящей заявки. На этапе 511, значение продуктивности определяется на основании первого веса подложки и второго веса подложки.
Настоящее изобретение также предусматривает определение коэффициентов трения, в то время как подложка и образец проходят друг по другу. С использованием систем, описанных в материалах настоящей заявки, образец перемещается или скользит по подложке в пределах схемы, которая включает в себя ускорение и замедление, в отличие от предшествующего допущения, что движение происходит с равномерной скоростью. Поэтому, следующая модель, основанная на втором законе Ньютона, применялась для расчета коэффициента трения между образцом и подложкой. Фиг. 4 иллюстрирует конфигурацию модели подложки и образца, проходящих друг по другу, где FN - нормальная сила, приложенная к наружному слою 408, FL - равнодействующая поперечная сила через наружный слой 408, α - угол между изделием 410 и наружным слоем 408 в любое заданное время. На основании конфигурации, отображенной на фиг. 4, коэффициент трения в любое заданное время может быть выражен, как изложено ниже:
Движущая сила = FL sin (α)-FN cos (α); сила трения = μ · [FL cos (α)+FN sin (α)]; второй закон Ньютона:
FL sin (α)-FN cos (α)-μ·[FL cos (α)+FN sin (α)]=m·a; μ={ FL sin (α)-FN cos (α)-m·a}/[FL cos (α)+FN sin (α)], где m·a - инерция (каретки + образца), умноженная на ускорение (a).
Устройство 107 также может использоваться для измерения отслаивания. Отслаивание является измерением потери веса материала с образца, который был растянут. Оно является мерой того, насколько хорошо материал (такой как антиперспирантный/дезодорирующий состав) будет сохраняться на подложке. В одном из вариантов осуществления, заданное количество материала (например, 0,65±0,03 г), который должен испытываться, наносится на кусок шерстяной ткани (Style #530 от корпорации Testfabrics) заданного размера (например, 7,6 см × 15,2 см (3 дюйма × 6 дюймов)). Шерстяная ткань растягивается на заданное расстояние (например, 6 см) и возвращается, а затем растягивается в противоположном направлении на такое же заданное расстояние и возвращается в качестве одного растяжения. Вес шерстяной ткани и материала измеряется после заданного количества растяжений (например, 50, 150 и/или 450 растяжений). Процентная потеря веса материала с шерстяной ткани регистрируется в качестве измерения отслаивания. В одном из вариантов осуществления, результаты с четырех образцов могут быть усреднены для выдачи усредненного результата. В устройстве 107, один конец шерстяной ткани прикреплен к стационарному держателю, который прикреплен к столу 211 на подшипниках качения в качестве замены держателя 201 образца, а другой конец шерстяной ткани прикреплен к платформе 209 подложки, ориентированной поперек на длине в 15,2 см. Шерстяная ткань, таким образом, перпендикулярна платформе 209 подложки. Платформа 209 подложки затем перемещается для растягивания шерстяной ткани.
Примеры
Пример 1: Продуктивность/скольжение на образце
Продуктивность на образце измеряется с использованием системы, описанной в материалах настоящей заявки. Система удерживает дезодорирующий стержень находящимся на одном уровне по отношению к подложке и перемещает стержень с заданной скоростью на расстояние в 100 мм с 500 г силы. Программа продуктивности измеряет объем продукта, нанесенного на шерстяную подложку через 10 проходов, тогда как программа скольжения измеряет трение для перемещения стержня через подложку во время одного прохода. Непосредственно перед анализом продуктивности, три стержня каждого экспериментального стержня срезаются плоским срезом, а затем поверхность стержня дополнительно уплощается или предварительно обрабатывается на инструменте с использованием скорости 30 мм/с в течение 20 циклов. Для того чтобы определить продуктивность, шерстяная подложка взвешивается на весах, а затем возвращается на платформу подложки. Стержень пропускается по подложке 10 раз на скорости 20 мм/с, а затем подложка снимается и возвращается на весы для получения веса продукта на подложке. Продуктивность измеряется три раза на стержне и рассчитывается среднее значение трех результатов. Коэффициент трения для первого и десятого проходов записывается.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ОТСЛАИВАНИЯ-СКОЛЬЖЕНИЯ-ПРОДУКТИВНОСТИ ДЛЯ СНЯТИЯ ХАРАКТЕРИСТИК ДЕЗОДОРИРУЮЩИХ И АНТИПЕРСПИРАНТНЫХ СТЕРЖНЕЙ | 2008 |
|
RU2442137C2 |
| АНТИПЕРСПИРАНТНЫЕ/ДЕЗОДОРАНТНЫЕ КОМПОЗИЦИИ | 2008 |
|
RU2418572C1 |
| АНТИПЕРСПИРАНТНЫЕ ДЕЗОДОРАНТНЫЕ КОМПОЗИЦИИ | 2011 |
|
RU2466712C2 |
| СПОСОБ УВЕЛИЧЕНИЯ УСТОЙЧИВОСТИ АРОМАТА АНТИПЕРСПИРАНТНОЙ/ДЕЗОДОРАНТНОЙ КОМПОЗИЦИИ | 2008 |
|
RU2455976C1 |
| ДЕЗОДОРАНТ НА ОСНОВЕ ПРОПИЛЕНГЛИКОЛЯ/ГЛИЦЕРИНА | 2008 |
|
RU2436563C1 |
| ПЛАНЕТАРНАЯ ТРАНСМИССИЯ | 2009 |
|
RU2448292C1 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП С КОМПАКТНЫМ СКАНЕРОМ | 2012 |
|
RU2571449C2 |
| Устройство управления манипуляторами роботохирургического комплекса | 2020 |
|
RU2757969C1 |
| Устройство для определения стойкости текстильных материалов к пиллингуемости | 2016 |
|
RU2625537C1 |
| ОПОРНАЯ КОНСТРУКЦИЯ ДЛЯ ПОЗИЦИОНИРОВАНИЯ ПАЦИЕНТА С ТРАНСЛЯТОРОМ ПЕРЕМЕЩЕНИЯ ТУЛОВИЩА ПАЦИЕНТА | 2011 |
|
RU2571805C9 |
Предложен способ измерения отслаивания материала, согласно которому подготавливают образец шерстяной ткани заданного размера. Затем прикладывают начальный вес материала к образцу шерстяной ткани. Далее прикрепляют первый конец шерстяной ткани к стационарному держателю, а второй конец к подвижной платформе подложки. Затем осуществляют растяжение перемещая подвижную платформу подложки на заданное расстояние и возвращая, а затем перемещая ее в противоположном направлении на такое же заданное расстояние и возвращая за 1 растяжение. Далее повторяют растяжение заданное число растяжений, измеряют вес образца шерстяной ткани и материала после заданного числа растяжений и определяют потерю веса материала у образца шерстяной ткани. Техническим результатом изобретения является создание способа, с возможностью измерения отслаивания материала. 3 з.п. ф-лы, 5 ил.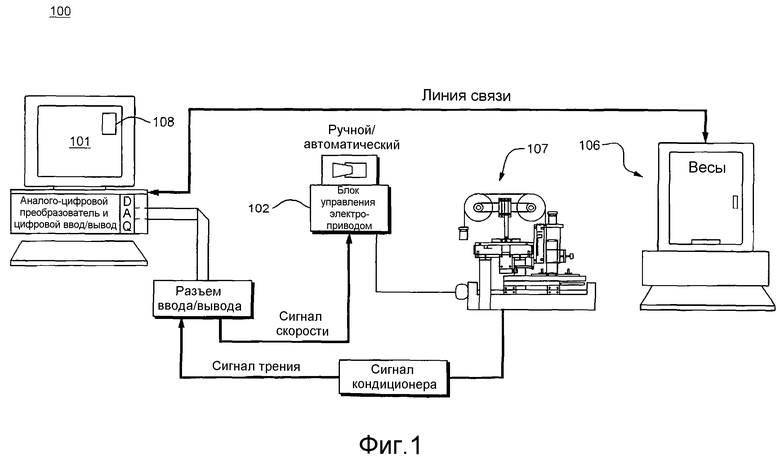
1. Способ измерения отслаивания материала, согласно которому:
подготавливают образец шерстяной ткани заданного размера;
прикладывают начальный вес материала к образцу шерстяной ткани;
прикрепляют первый конец шерстяной ткани к стационарному держателю, а второй конец - к подвижной платформе подложки;
осуществляют растяжение, перемещая подвижную платформу подложки на заданное расстояние и возвращая, а затем перемещая ее в противоположном направлении на такое же заданное расстояние и возвращая за 1 растяжение;
повторяют растяжение заданное число растяжений;
измеряют вес образца шерстяной ткани и материала после заданного числа растяжений;
определяют потерю веса материала у образца шерстяной ткани, которая измеряется количеством потери материала с образца, деленным на начальный вес материала после заданного числа растяжений.
2. Способ по п.1, при котором образец шерстяной ткани имеет размер 7,6 см×15,2 см, а начальным весом материала является 0,65±0,03 г.
3. Способ по п.1, при котором заданным расстоянием является 6 см.
4. Способ по п.1, при котором заданным числом растяжений является 50, и, по выбору, одним или более из 150 и 450.
| ПЛОТНОМЕР ДЛЯ ЖИДКИХ СРЕД | 0 |
|
SU196429A1 |
| US 2005226820 A1, 13.10.2005 | |||
| Способ определения схватываемости слоев клеевого соединения текстильных материалов | 1986 |
|
SU1429003A1 |
| СПОСОБ ИЗМЕРЕНИЯ СОПРОТИВЛЕНИЯ ОТСЛАИВАНИЮ В БУМАЖНОМ СОЕДИНЕНИИ, В КОТОРОМ СЦЕПЛЕНИЕ ОБЕСПЕЧИВАЕТСЯ АДГЕЗИЕЙ, И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СОПРОТИВЛЕНИЯ ОТСЛАИВАНИЮ | 1995 |
|
RU2110787C1 |

