Заявляемое изобретение относится к области медицинского оборудования, в частности к устройствам управления манипуляторами хирургических роботизированных систем для минимального инвазивного вмешательства.
Традиционным видом хирургического вмешательства является лапаратомия, которая заключается в выполнении длинного разреза в брюшной полости, через который вставляются традиционные хирургические инструменты. Однако выполнение длинных разрезов неминуемо приводит к высоким кровопотерям и длительному восстановлению пациентов. Кроме того возрастает риск инфекционных осложнений.
Применение малоинвазивных хирургических вмешательств (лапароскопия) позволяет устранить указанные недостатки. Вместо одного длинного разреза на пациенте делают от четырех до пяти маленьких, через которые вводятся длинные и тонкие хирургические инструменты и эндоскопические камеры. Данный метод уменьшает кровопотери, сокращает время пребывания в больнице и уменьшает болезненные ощущения пациента в период восстановления. Однако, несмотря на вышеупомянутые преимущества, лапароскопия требует от хирурга чрезвычайно высоких навыков работы. Входной разрез действует как точка вращения, уменьшая свободу позиционирования и ориентации инструментов внутри пациента. Кроме того, работа с эндоскопическими инструментами вынуждает хирургов работать в неудобной позе, что может быть утомительным в течение нескольких часов работы, снижается чувствительность, усиливается тремор рук хирурга.
Развитие лапароскопии привело к возникновению роботохирургии и, в частности, к возможности применения роботизированных хирургических систем. Минимально-инвазивные хирургические операции с применением роботизированных систем характеризуются низкой травматичностью, более быстрым выздоровлением пациента, сниженным риском развития осложнений и высокой эффективностью.
С помощью компьютеризированного роботизированного интерфейса данные системы позволяют выполнять лапароскопию дистанционно, когда хирург сидит за консолью и с помощью управляющей рукояти управляет манипуляторами, передающими движения непосредственно на хирургические инструменты.
Управляющая рукоять размещается на стойке хирурга и может располагаться на расстоянии от операционного стола для дистанционного управления манипуляторами роботизированного хирургического комплекса.
Известно устройство дистанционного управления манипулятором (патента США № 10112296, МПК B25J 9/16, B25J 3/04, B25J 13/02, A61B 34/37, A61B 34/00, G09B 9/00, опубликован 27.07.2017), содержащее антропоморфную руку, соединенную с управляющей рукоятью. Антропоморфная рука включает в себя первый участок, соединенный с опорным элементом А посредством первого соединения, сконфигурированного для определения первой оси вращения Z, и второй участок, соединенный с первым участком с помощью второго соединения, сконфигурированного для определения второй оси вращения Y. Антропоморфная рука также включает третий участок, соединенный со вторым участком с помощью третьего соединения, сконфигурированного для определения третьей оси вращения Х, и концевой участок, включающий концевой элемент, сконфигурированный для соединения с третьим участком, и противоположный концевой элемент, соединенный с управляющей рукоятью. При этом управляющая рукоять съемным образом соединяется с концевым участком антропоморфной руки посредством шарнирного соединения. Управляющая рукоять включает в себя первый концевой участок, обращенный к пользователю, и второй концевой участок, расположенный на противоположной стороне, выполненный с возможностью приема кольцевого корпуса, а также раму, выполненную с возможностью поддержания внутренней платформы, которая включает акселерометр, гироскоп и магнитометр. На управляющей рукояти предусмотрено захватное устройство для удерживания оператором, движение которого регулируется с помощью магнитометра. Устройство дистанционного управления манипулятором имеет семь степеней свободы, при этом первая, вторая и третья степени свободы формируются путем вращения антропоморфной руки, соответственно обеспечиваемое первым соединением, вторым соединением и третьим соединением; четвертая, пятая и шестая степени свободы сообщаются управляющей рукояти с помощью шарнирного соединения; седьмая степень свободы тоже относится к управляющей рукояти и обеспечивается захватывающим устройством и магнитометром.
Известна ручка, охватываемая кистью руки оператора, выполненная с возможностью управления хирургическим инструментом в ответ на движения кисти руки оператора путем преобразования механического движения в электрический сигнал (патент США №20180168758, МПК A61B 34/00, A61B 18/14, A61B 34/30, опубликован 21.06.2018). Ручка выполнена в виде корпуса, сочлененного с устройством ввода, которое формирует управляющие хирургическим инструментом сигналы в ответ на движение руки оператора. Ручка имеет корпус эргономичной формы с двумя пальцевыми захватами, выполненными с возможностью отведения от продольной оси корпуса для перемещения соосного оси корпуса ручки вала. На продольной оси корпуса установлен датчик (линейный энкодер) для преобразования аналогового сигнала в цифровой и подачи управляющего сигнала на устройство ввода.
В известных решениях отсутствует вращение запястья джойстика в 2-х перпендикулярных плоскостях относительно оси, находящейся примерно в центре запястья, что не обеспечивает выполнение всех необходимых движений инструмента при операции, а именно не позволяет выполнить наложение шва на разрез тканей при операции.
Известно устройство ввода для перемещения концевых эффекторов и приведения их в действие, например, путем раскрытия и закрытия зажимных устройств концевого эффектора (патент США №6587750, МПК G06F 19/00, A61B 19/00, опубликован 27.03.2003). Оператор задает команду для приведения в действие хирургического концевого эффектора путем сжимания первого и второго элементов зажима, расположенных на рукоятке. Рукоятка поддерживается рычажным механизмом, включающим соединения для обеспечения перемещения рукоятки, как при поступательном движении, так и регулировании направления. Рычажный механизм включает руку, которая обеспечивает поступательное движение рукоятки, и кардан, который, обеспечивает и воспринимает изменения в ориентации рукоятки. Рука включает звенья, соединенные с помощью вращательных соединений, и опорную плиту для установки станции управления перед экраном. Приводы сцепляют с возможностью передачи приводного усилия соединения руки, при этом приводы, главным образом, установлены около опорной плиты, чтобы свести к минимуму инерцию всей системы ввода. Приводы управляются процессором, и, главным образом, обеспечивают обратную связь оператору для определения сил, прилагаемых к концевому эффектору хирургической средой, как правило, с помощью устройства копирующего управления. Вращательное положение рукоятки вокруг оси может быть определено с использованием потенциометра или энкодера, находящегося в приводе, и/или с помощью отдельного датчика вращения, присоединенного непосредственно к валу. Предлагаемая система обеспечивает шесть степеней свободы хирургического инструмента: вращение, тангаж, рыскание, линейное перемещение инструмента, сжатие и разжатие зажимных устройств.
В данном техническом решении отсутствует обратная связь на ручки, при нажатии и расжатии на которые происходит сжатие и расжатие браншей инструмента.
Известен механизм с обратной связью (патента Китая №101444431 МПК A61B 17/00, A61B 19/00, B25J 7/00, опубликован 03.06.2009), содержащий базовый механизм, четырехзвенный рычажный механизм и запястный механизм. Базовый механизм включает в себя основание, на котором закрепляется стойка с первым сервоприводом. На первый сервопривод устанавливается седло первого цилиндра, на который садится первый цилиндр, соединяемый с валом первого потенциометра. На верхней части стойки находится дугообразная нижняя пластина. На первый цилиндр наматывается стальная проволока, которая огибает дугообразную нижнюю пластину и крепится к механизму предварительного натяжения. Когда положение первого цилиндра зафиксировано, и дугообразная нижняя пластин вращается вокруг оси R1 первого удлинительного вала, установленного на ней, первый цилиндр натягивает проволоку и заставляет дугообразную нижнюю пластину вращаться с той же линейной скоростью. В результате первый потенциометр генерирует выходной сигнал, а первый серводвигатель передает крутящий момент обратной связи на дугообразную нижнюю пластину через первый цилиндр и стальную проволоку. Четырехзвенный рычажный механизм включает дугообразный кронштейн, устанавливаемый на дугообразную нижнюю пластину. На дугообразный кронштейн крепятся стержни, образующие параллелограмм и соединенные между собой подвижно с помощью шкивов. На дугообразном кронштейне также устанавливаются второй и третий серводвигатели, к которым крепятся второй и третий цилиндры с намотанными на них стальными проволоками. При этом стальная проволока проходит через дугообразную качающуюся пластину. Когда четырехзвенный рычажный механизм приходит в движение, второй и третий цилиндры приводятся в движение стальной проволокой, чтобы катиться по поверхности дугообразной качающейся пластины вместе со стержнями.
По данной кинематической схеме затруднено выполнение наложение шва на разрез тканей при операции.
Известен зажимной механизм для управления манипулятором (патент Китая № 209107587, МПК A61B 34/37, A61B 17/00, опубликован 16.07.2019 и патент Китая № 107320195, МПК A61B 34/37, B25J 9/00, B25J 19/00, опубликован 07.11.2017), который включает опору, зажимную ручку, элемент в форме дуги, приводной механизм и резьбовой стержень. Приводной механизм расположен на опоре, элемент в форме дуги соединяется с зажимной ручкой, резьбовой стержень и элемент в форме дуги соединяются посредством стального проволочного троса, образуя механизм лебедки, а резьбовой стержень соединяется с приводным механизмом, таким образом, приводной механизм заставляет вращаться резьбовой стержень для приведения в движение стального проволочного троса для того, чтобы заставить зажимную ручку перемещаться. Зажимная ручка соединяется с возможностью вращения с соединительным стержнем, который снабжен скользящей частью, опора имеет направляющую часть, скользящая часть соответствует направляющей части для осуществления перемещения скользящей части по направляющей части, таким образом, зажимная ручка формирует кривошипно-скользящий механизм. Скользящая часть может быть представлена ползуном, а направляющая часть может представлять собой направляющий рельс, на котором может располагаться пружина возврата. Зажимной механизм имеет две два соединительных стержня, которые одним концом соединяются с двумя зажимными ручками, а другим концом со скользящей частью. На внутренней стороне элемента в форме дуги находится колесо, фиксирующее проволоку, для фиксации стального проволочного троса механизма лебедки. Опора зажимного механизма имеет Т-образную форму.
По данной кинематической схеме затруднено выполнение наложение шва на разрез тканей при операции.
В качестве ближайшего аналога принята управляющая рукоять (патент США №20100262162, МПК A61B 19/00, опубликован 14.10.2010), входящая в состав роботизированной хирургической системы. Управляющая рукоять содержит поворотный вал, первый U-образный элемент, второй U-образный элемент и пару лапок. Первый U-образный элемент установлен на верхнем конце поворотного вала с возможностью вращения в горизонтальной плоскости. Угол, на который первый U-образный элемент поворачивается относительно оси поворота, определяется датчиком вращения. Второй U-образный элемент меньше по размеру, чем первый U-образный элемент, и расположен в первом U-образном элементе. Первый U-образный элемент и второй U-образный элемент соединены друг с другом с возможностью вращения. Второй U-образный элемент может вращаться в вертикальной плоскости относительно первого U-образного элемента. Угол, на который второй U-образный элемент поворачивается относительно первого U-образного элемента определяется посредством датчик вращения. Лапки установлены с возможностью вращения на промежуточной части второго U-образного элемента посредством вала. Угол, на который вал поворачивается относительно второго U-образного элемента, определяется датчиком вращения. Лапки открываются и закрываются относительно вала, т. е. могут перемещаться по направлению друг от/к другу. Управляющая рукоять может перемещаться в направлениях X, Y и Z. Управляющая рукоять может наклоняться в направлениях X и Y относительно консоли с помощью механизмов наклона.
Данный джойстик не обладает интуитивностью и легкостью в работе так в нем не предусмотрены серводвигатели, помогающие двигаться руке, а также из-за особенности кинематической схемы. Решение не предусматривает обратную связь на ручки, при нажатии и расжатии на которые происходит сжатие и расжатие браншей инструмента.
Техническая задача - обеспечение точного позиционирования хирургического инструмента, повышение безопасности системы.
Технический результат - высокая степень маневренности устройства управления манипулятором при обеспечении плавных и естественных перемещений рук хирурга, комфортные условия работы для хирурга при длительных операциях.
Технический результат достигается тем, что устройство управления манипулятором роботохирургического комплекса, содержащий рычажный механизм, рукоять управления и цифровой блок управления, при этом рычажный механизм включает два рычага соединенных друг с другом с возможностью перемещения, первый из которых соединен с валом, выполненным с возможностью вращения относительно неподвижной опоры, а второй рычаг соединен с рукоятью управления, при этом каждый из рычагов соединен со шкивом-балансиром; рукоять управления включает раму, соединенную со вторым рычагом с возможностью поворота относительно соединяющей их оси, основание, соединенное с рамой с возможностью поворота относительно соединяющей их оси, и ручку, выполненную с возможностью вращения и сжатия-разжатия закрепленных на ней рычагов с лепестками.
Заявляемое устройство предназначено для преобразования в цифровой сигнал команд, подаваемых хирургом посредством движений рук.
Устройство состоит из рычажного механизма, управляющей рукояти, контакт с которой осуществляет хирург, и цифрового блока управления (не показан).
Устройство управления манипулятором обеспечивает как передачу команд от хирурга к консоли хирурга, в частности на манипулятор и хирургический инструмент, так и получение команд на руку хирурга в виде обратной связи для обеспечения тактильных ощущений на руки хирурга.
При этом рычажный механизм выполнен с возможностью вращения относительно неподвижной опоры и поступательного перемещения вверх-вниз, вперед-назад.
Управляющая рукоять выполнена с четырьмя степенями свободы и имеет возможность поворота относительно рычажного механизма, перемещения вперед-назад, влево-вправо, а также сжатия-разжатия лепестков ручки.
В некоторых вариантах осуществления изобретения серводвигатель выполнен со встроенным электромагнитным тормозом и датчиком положения углов (энкодером). В других вариантах осуществления энкодер соединяется с двигателем посредством специального переходника.
В некоторых вариантах осуществления изобретения сервопривод, соединенный с рычажным механизмом, выполнен с редуктором.
Энкодеры преобразуют движения кисти оператора по каждой из степеней свободы устройства управления в цифровые сигналы, которые поступают на микроконтроллеры, имеющие перечень инструкций (скорость перемещения, допустимые параметры положения инструмента в пространстве) и осуществляющие обработку данных о положении устройства управления. При отклонении полученных данных от заложенных инструкцией микроконтроллер подает команду на соответствующий сервопривод для осуществления корректировки параметров положения.
Цифровой блок управления предназначен для получения сигналов от микроконтроллеров о текущем положении устройства управления и передачи полученных сигналов на внешнюю систему управления роботохирургическим комплексом, а также для получения управляющих сигналов от внешней системы управления роботохирургическим комплексом и передачи их на микроконтроллеры устройства управления.
Заявляемое устройство характеризуется высокой степенью жесткости конструкции при одновременном обеспечении мобильности движений оператора и высокой точности согласованности перемещений рук оператора и хирургического инструмента, что позволяет проводить длительные манипуляции с меньшими усилиями.
Заявляемое изобретение иллюстрируется следующими чертежами:
Заявляемое изобретение поясняется чертежами:
Фиг.1-2 общий вид устройства управления манипулятором;
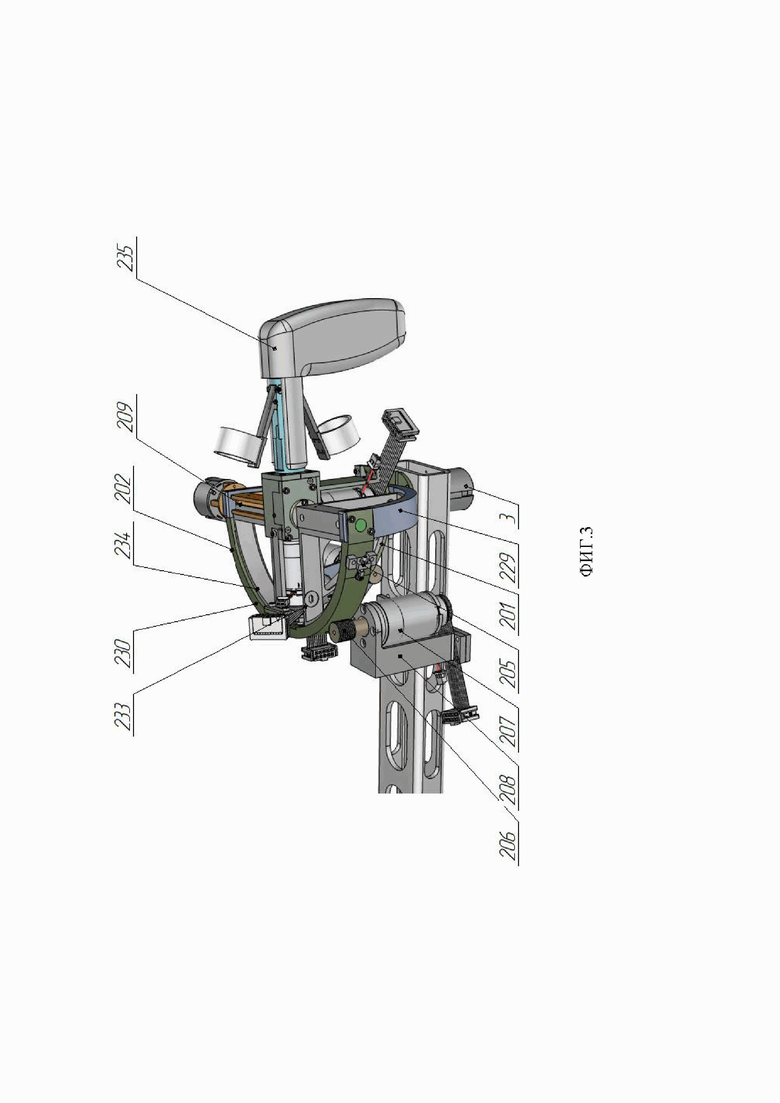
Фиг.3 общий вид управляющей рукояти устройства управления манипулятором;
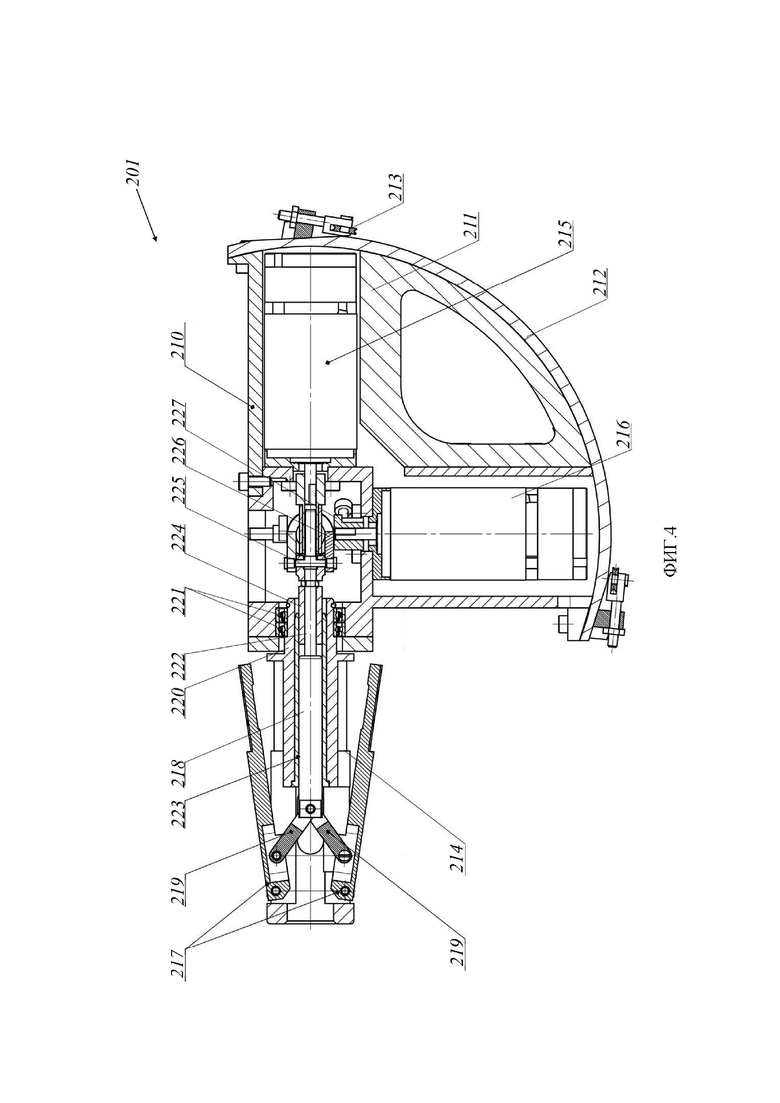
Фиг.4 вид основания управляющей рукояти в разрезе;
Фиг.5 общий вид управляющей рукояти, вид сзади.
Роботохирургический комплекс включает консоль хирурга, снабженную устройствами управления манипуляторами хирургических инструментов; стойку пациента, снабженную манипуляторами хирургических инструментов; вычислительную систему управления роботохирургическим комплексом, обеспечивающую взаимодействие узлов системы.
Стойка пациента роботохирургического комплекса содержит по меньшей мере один манипулятор с установленным на нем хирургическим инструментом, а консоль хирурга - по меньшей мере одно устройство управления манипулятором, которое преобразует и передает команды оператора, подаваемые путем ручного перемещения устройства управления, на вычислительную систему управления комплексом, а также получает команды от вычислительной системы управления комплексом.
На фиг.1 представлен общий вид устройства управления по настоящему изобретению, включающий рычажный механизм 1, управляющую рукоять 2 и цифровой блок управления (не показан).
Рычажный механизм 1 состоит из системы рычагов 103 и 104, соединенных друг с другом с возможностью поворота друг относительно друга, и которые крепятся к условно изображенному опорному участку консоли хирурга 101, жестко закрепленному на кронштейне 102
На опорном участке 101 посредством кронштейна 105 установлен барабан 106, приводимый во вращение серводвигателем 107 и соединенный посредством троса со шкивом 108, закрепленным на валу 109, проходящим через отверстие в опорном участке 101. Трос закреплен на шкиве 108 посредством двух натяжных роликов 110 таким образом, что при перемещении шкива 108, осуществляется намотка/размотка троса на барабане 106. На опорном участке 101 установлен кронштейн 111, служащий для установки энкодера 3. На валу 109 установлен стакан 112 с подшипниками качения. Вал 109 посредством концевого переходного участка 113 соединен с кронштейном114, который в свою очередь соединен через вставку 115 с одним концом рычага 103. Кронштейн 114 закреплен на оси 116 и имеет полочки для размещения серводвигателей 117 и 118. Кронштейн 114 передает момент вращения через рычаги 119 и 120 на шкивы-балансиры 121 и 122 соответственно. Шкив 121 соединен посредством троса, закрепленного на его дугообразной поверхности с помощью натяжных роликов 123, с барабаном 124, установленным на серводвигателе 118. Шкив 122 соединен посредством троса, закрепленного на его дугообразной поверхности с помощью натяжных роликов 125, с барабаном 126, установленным на серводвигателе 117. Шкив-балансир 121 обеспечивает поддержание рычага 104 приблизительно в горизонтальном положении, а шкив-балансир 122 обеспечивает поддержание рычага 103 в приблизительно вертикальном положении.
Второй конец рычага 103 соединен посредством вставки 127 с осью 128. Для обеспечения жесткости конструкции, а также для передачи перемещения от вала двигателя 117 на рычаг 104 на осях 116 и 128 размещены шкивы 129 и 130 соответственно, соединенные тросовой передачей.
На оси 128 посредством вставки 131 закреплен один конец рычага 104, а на другом конце указанного рычага 104 установлена управляющая рукоять 2.
Управляющая рукоять 2 содержит основание 201, соединенное с рамой 202, выполненной с возможностью поворота относительно оси вставки 203. Рама 202 подвижно закреплена на концевом участке рычага 104 посредством вставки 203. На раме 202 закреплены два натяжных ролика 205, обеспечивающих при ее повороте относительно вертикальной оси намотку/размотку троса на барабане 206, установленном на серводвигателе 207. Серводвигатель 207 закреплен на рычаге 104 посредством кронштейна 208.
Основание 201 содержит выполненный с возможностью поворота относительно оси 209 корпус 210, соединенный через фланец 211 с дугой 212, на которой закреплены два натяжных ролика 213, и с корпусом ручки 214. В корпусе 210 размещены серводвигатели 215 и 216, обеспечивающие соответственно вращение корпуса ручки и сжатие-разжатие лепестков 217, подвижно закрепленных на корпусе ручки 214. В корпусе ручки 214 размещен вал 218, шарнирно соединенный с рычагами 219, которые в свою очередь шарнирно соединены с лепестками 217, и призматическим соединением с втулкой 220. Втулка 220 одним своим концом размещена в стакане корпуса 210 с шариковыми подшипниками качения 221 с возможностью поворота вокруг продольной оси. Вал 218 с удлиненной вставкой 222, выполненных в виде единой детали, соединен призматическим соединением с втулкой 223, которая в свою очередь соединена с втулкой 220. Удлиненная вставка 222 шарнирно соединена с втулкой 224, которая призматически соединена с втулкой 223 с одного конца, а с другого конца шарнирно с двумя осями 225. Ось 225 соединена посредством рычага 226 с втулкой 227, установленной на выходном валу серводвигателя 216. На дуге 212 основания 201 закреплен трос посредством натяжных роликов 213, наматываемый на барабан 228, установленный на валу серводвигателя 204.
Удлиненная вставка 222 соединена с выходным валом серводвигателя 215 и обеспечивает передачу вращения на вал 218.
Рама 202 включает две дуги 229 и 230, размещенные во взаимно перпендикулярных плоскостях и жестко закрепленные друг с другом. Дуга 229, размещенная в вертикальной плоскости посредством вставки 203 подвижно соединена с рычагом 104 и содержит промежуточные ребра 231 и 232. Дуга 230, размещенная в горизонтальной плоскости содержит промежуточные ребра 233 и 234 и два натяжных ролика 205 на внешней поверхности дуги. Ребро 232 выполнено с каналом в верхней части для размещения оси 209.
Каждый серводвигатель, входящий в состав устройства управления манипулятором соединен с энкодерами 3, обеспечивающими измерение параметров угловых и линейных перемещений и направление данных на микроконтроллеры 4. Информация с каждого микроконтроллера 4 поступает в цифровой блок управления (мастер-контроллер), где осуществляется обработка данных о положении элементов устройства управления и формирование команд на манипулятор хирургического инструмента, установленного на стойке пациента.
Описание работы устройства
Заявляемое устройство работает следующим образом:
Оператор, находясь за стойкой хирурга, осуществляет управление манипулятором хирургического инструмента, размещенного на стойке пациента. Оператор держит управляющую рукоять 2 таким образом, что его большой и указательный пальцы размещаются в лепестках 217, а кисть опирается на опорную ручку 235. Оператор может осуществлять перемещение устройства управления следующим образом: поворот опорной ручки 235, закрепленной на управляющей рукояти 2; перемещение в целом рукояти 2 посредством поворота рамы 202 относительно вертикальной оси вставки 203 и поворота основания 201 относительно горизонтальной оси 209; перемещение лепестков 217, обеспечивающих сжатие-разжатие бранш хирургического инструмента; перемещение рычажного механизма в целом путем поворота его относительно оси вала 109 и перемещения рычагов 103 и 104 рычажного механизма вверх-вниз относительно осей 116 и 128 соответственно.
При этом осуществляется не строго синхронное преобразование перемещения устройства управления манипулятором в перемещение манипулятора хирургического инструмента. За счет использования цифровой обработки данных снимаемых с энкодеров, установленных на серводвигателях устройства управления, а также данных поступающих от энкодеров манипулятора (обратная связь) осуществляется преобразование по определенному математическому алгоритму, позволяющему получить интуитивность управления.
Перемещение рычажного механизма посредством его поворота относительно оси вала 109 осуществляется за счет подвижного соединения вала 109 и стакана 112 с шарикоподшипниками, установленного на опорном участке 101. При вращении вала 109 осуществляется перемещение соединенного с ним шкива 108. Указанное перемещение непрерывно фиксируется энкодером, установленным на валу 109, преобразовывается в цифровой сигнал и передается на цифровой блок обработки. При отклонении углового положения вала 109 и скорости его перемещения подается команда на включение серводвигателя 107, вращение от выходного вала серводвигателя передается на барабан 106, при этом на барабане 106 начинает наматываться или разматываться трос, вызывая смещение шкива 108 на необходимую величину. Подключение серводвигателей на джойстике позволяет облегчить движения звеньев джойстика посредством усиления моментов кручения.
Перемещение рычажного механизма относительно осей 116 и 128 осуществляется под воздействием руки оператора. При этом в отсутствие указанного усилия, а также для сокращения прилагаемого усилия используется система шкивов-балансиров, обеспечивающая поддержание рычага 104 приблизительно в горизонтальном положении, а рычага 103 приблизительно в вертикальном положении, при этом рычаг 103 связан через вставку 115 и рычаг 119 с балансиром 122, а рычаг 104 через вставку 131 со шкивом 130, посредством тросовой передачи связанным со шкивом 129, соединенным с балансиром 121. Перемещения рычагов фиксируются энкодерами 3. При отклонении углового положения осей 116 и 128 и скорости их перемещения подается команда на включение серводвигателей 117 и 118 соответственно. Вращение от выходного вала серводвигателя 117 передается на барабан 126, при этом на барабане 126 начинает наматываться или разматываться трос, вызывая смещение шкива 122 на необходимую величину для балансировки положения рычага 103. Вращение от выходного вала серводвигателя 118 передается на барабан 124, и на барабане 124 начинает наматываться или разматываться трос, вызывая смещение шкива 121 на необходимую величину для балансировки положения рычага 104.
Перемещение рукояти 2 влево-вправо относительно рычажного механизма 1 осуществляется при воздействии оператора на рукоятку посредством поворота рамы 202 относительно вертикальной оси вставки 203, подвижно закрепленной на рычаге 104. Указанное перемещение также непрерывно фиксируется энкодером, преобразовывается в цифровой сигнал и передается в цифровой блок обработки. При отклонении углового положения оси вставки 203 подается команда на включение серводвигателя 207, вращение от выходного вала серводвигателя 207 передается на барабан 206, при этом на барабане 206 начинает наматываться или разматываться трос, вызывая поворот дуги 230 на необходимую величину.
Также оператор может осуществить перемещение опорной ручки 235 вверх-вниз за счет поворота основания 201 относительно горизонтальной оси 209, при этом для компенсации приложенного усилия используется серводвигатель 204 с установленным на его выходном валу барабаном 228, при этом осуществляется намотка-размотка троса закрепленного посредством натяжных роликов 213 на дуге 212 основания 201.
При повороте опорной ручки 235, закрепленной на управляющей рукояти 2, осуществляется вращение вала 218 относительно горизонтальной оси. Указанное перемещение фиксируется энкодером серводвигателя 215. При недостаточности усилия для поворота ручки 235, а также при отклонении углового положения вала 218 от допустимого подается команда на включение серводвигателя 215.
Сжатие-разжатие лепестков 217 приводит к смещению рычагов 219 и возвратно-поступательному перемещению связанного с ними вала 218 с удлиненной вставкой 222, которое в свою очередь передается на рычаг 226, связанный с втулкой 227 на выходном серводвигателя 216. Смещение вала фиксируется энкодером и при отклонении от заданного значения осуществляется подача команды на включение серводвигателя 216 для компенсации усилия оператора.
Конструкция устройства управления обеспечивает оператору свободу управления (интуитивное управление) хирургическим инструментом, обеспечивая комфортное положение руки даже при длительном ведении операции. Усилия, приложенные оператором, обрабатываются цифровым блоком управления, который обеспечивает обработку данных по определенному математическому алгоритму и передачу команды на манипулятор хирургического инструмента. Наличие энкодеров и серводвигателей позволяет усилить управляющие сигналы оператора при необходимости, а также не допустить отклонения хирургического инструмента от заданного положения, что обеспечивает безопасность ведения операции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ведущий манипулятор роботохирургического комплекса | 2022 |
|
RU2803231C1 |
| Манипулятор роботизированного хирургического комплекса | 2020 |
|
RU2754219C1 |
| КОНТРОЛЛЕР КИСТИ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2716353C1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| КОНТРОЛЛЕР ЗАПЯСТЬЯ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2718568C1 |
| Система для проведения робот-ассистированной операции удаления камней в мочевыделительной системе (варианты) | 2023 |
|
RU2831301C1 |
| КОМБИНИРОВАННЫЙ МАНИПУЛЯТОР РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2721485C1 |
| СПОСОБ УПРАВЛЕНИЯ КАМЕРОЙ В РОБОТОХИРУРГИЧЕСКОМ КОМПЛЕКСЕ | 2020 |
|
RU2721461C1 |
| Роботизированная хирургическая система транскатетерного протезирования клапана аорты | 2022 |
|
RU2789707C1 |



Изобретение относится к медицине, а именно к устройствам управления манипуляторами роботохирургического комплекса. Устройство содержит рычажный механизм, рукоять управления и цифровой блок управления. Рычажный механизм включает два рычага соединенных друг с другом с возможностью перемещения. Первый из рычагов соединен через первую промежуточную вставку и ось вращения с валом, выполненным с возможностью вращения относительно неподвижной опоры, и посредством первой промежуточной вставки, кронштейна, первого промежуточного рычага с первым шкивом-балансиром, установленным на общей оси вращения. Второй рычаг с одного конца соединен с рукоятью управления, а со второго конца через вторую промежуточную вставку, тросовую передачу и второй промежуточный рычаг со вторым шкивом-балансиром. Шкивы-балансиры соединены посредством троса и натяжных роликов с барабанами, установленными на валах серводвигателей. Рукоять управления включает раму, состоящую из двух дуг, размещенных в перпендикулярных плоскостях, и соединенную со вторым рычагом с возможностью поворота относительно соединяющей их оси. Рукоять управления включает дугообразное основание, закрепленное на оси пересечения дуг рамы с возможностью поворота относительно соединяющей их оси, и ручку, выполненную с возможностью вращения и сжатия-разжатия закрепленных на ней рычагов с лепестками. Достигается повышение маневренности устройства управления манипулятором при обеспечении плавных и естественных перемещений рук хирурга. 5 з.п. ф-лы, 5 ил.
1. Устройство управления манипулятором роботохирургического комплекса, содержащее рычажный механизм, рукоять управления и цифровой блок управления, отличающееся тем, что рычажный механизм включает два рычага, соединенных друг с другом с возможностью перемещения, первый из которых соединен через первую промежуточную вставку и ось вращения с валом, выполненным с возможностью вращения относительно неподвижной опоры, и посредством первой промежуточной вставки, кронштейна, первого промежуточного рычага с первым шкивом-балансиром, установленным на общей оси вращения, а второй рычаг с одного конца соединен с рукоятью управления, а со второго конца через вторую промежуточную вставку, тросовую передачу и второй промежуточный рычаг со вторым шкивом-балансиром; шкивы-балансиры соединены посредством троса и натяжных роликов с барабанами, установленными на валах серводвигателей; рукоять управления включает раму, состоящую из двух дуг, размещенных в перпендикулярных плоскостях, и соединенную со вторым рычагом с возможностью поворота относительно соединяющей их оси, дугообразное основание, закрепленное на оси пересечения дуг рамы с возможностью поворота относительно соединяющей их оси, и ручку, выполненную с возможностью вращения и сжатия-разжатия закрепленных на ней рычагов с лепестками.
2. Устройство управления по п.1, отличающееся тем, что на валу установлен шкив в виде дуги окружности с натянутым тросом, намотанным на барабан, установленный на выходном валу серводвигателя.
3. Устройство управления по п.1, отличающееся тем, что управляющая рукоять выполнена с возможностью поворота относительно оси соединения с рамой и содержит дугу, на которой закреплен трос, намотанный на барабан, установленный на выходном валу серводвигателя.
4. Устройство управления по п.1, отличающееся тем, что одна из дуг рамы выполнена с возможностью поворота относительно оси соединения со вторым рычагом рычажного механизма, а на второй дуге рамы закреплен трос, намотанный на барабан, установленный на выходном валу серводвигателя.
5. Устройство управления по п.1, отличающееся тем, основание управляющей рукояти содержит корпус ручки с закрепленными на нем рычагами сжатия-разжатия с лепестками и опорной ручкой, рычаги сжатия-разжатия соединены с валом, выполненным с возможностью поворота и возвратно-поступательного перемещения, при этом вал через удлиненную вставку соединен с выходным валом шестого серводвигателя и через втулку и рычаг с выходным валом седьмого серводвигателя.
6. Устройство управления по любому из пп.1-5, отличающееся тем, что содержит энкодеры, соединенные с каждым серводвигателем и выполненные с возможностью передачи цифровых данных о положении элементов устройства на контроллеры для обработки данных и направления команд на перемещение манипулятора хирургического инструмента роботохирургического комплекса, а также получения команд на запуск серводвигателей.
| US 2003060927 A1, 27.03.2003 | |||
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| US 20140192020 A1, 10.07.2014 | |||
| US 20100262162 A1, 14.10.2010 | |||
| WO 2007136739 A2, 29.11.2007. | |||

