Изобретение относится к измерительной технике и может быть использовано в системах автоматического измерения, управления и аварийной защиты, в состав которых входят датчики, вырабатывающие двухполярные сигналы, в частности индукционные датчики частоты вращения и расхода.
Особенностями работы датчиков такого типа при измерении параметров вращения реальных объектов являются линейная зависимость амплитуды выходного сигнала датчиков от частоты [1] и значительный уровень помех в выходном сигнале, что накладывает существенные ограничения на схемные решения формирователей импульсов. Так, при изменении частоты вращения ротора от 300 об/мин до 30000 об/мин амплитуда выходного напряжения индукционного датчика также возрастет в 100 раз, причем при росте частоты вращения ротора существенно увеличится уровень помех. Наличие помех в выходном сигнале индукционных датчиков зависит как от вибрационного состояния измеряемого объекта, так и от качества изготовления и особенностей конструкции самого индукционного датчика совместно с ротором. На входе формирователя импульсов также имеют место периодические и одиночные электромагнитные помехи, генерируемые при функционировании различного рода преобразователей энергии, электромашинных элементов, переключателей, клапанов с электрическим приводом. Все перечисленные помехи приводят к ложным срабатываниям формирователя импульсов и смещениям момента переключения формирователя импульсов относительного истинного положения, что является причиной возникновения погрешностей измерения частоты вращения.
Для снижения влияния различного рода помех на выходной сигнал, схемы формирователей импульсов сигналов индукционных датчиков частоты вращения строятся с использованием компараторов с гистерезисом - триггера шмитта [2]. С целью существенного уменьшения диапазона изменения входного сигнала компаратора применяется входной интегратор, который преобразует входные импульсы в «вольт-секундные площади» входных сигналов, мало зависящие от частоты вращения ротора. Кроме этого, интегратор фильтрует высокочастотные помехи, тем самым дополнительно повышая помехоустойчивость формирователя импульсов.
Известно устройство формирования импульсов из сигналов индукционных датчиков частоты вращения [3], состоящее из входного интегратора, компаратора, построенного по схеме триггера шмитта, устройства выборки-хранения для фиксации максимума вольт-секундной площади, устройства управления. Его недостатком является достаточная сложность, отсутствие возможности изменения уровня гистерезиса в зависимости от параметров входного сигнала и недостаточная надежность, обусловленная тем, что для формирования импульсов из сигналов индукционных датчиков частоты вращения используется только одна полярность сигнала.
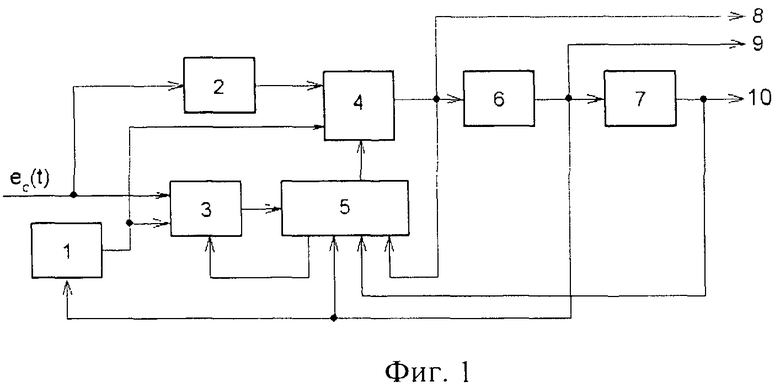
Из известных наиболее близким по технической сущности является устройство, реализующее способ формирования импульсов из сигналов индукционных датчиков частоты вращения [4]. Его структурная схема приведена на фиг.1. Устройство содержит два компаратора (3 и 4), инвертор (2), источник опорного сигнала (1), измерители частоты (5) и скорости изменения частоты (6), таймер (5). Отличительной особенностью этого устройства является блокирование переключения компараторов с момента предыдущего переключения на ожидаемое время до следующего переключения. Время блокирования компараторов задается таймером и определяется путем экстраполяции на основе результатов измерения частоты и скорости ее изменения.
Недостатком этого формирователя импульсов является недостаточная помехоустойчивость в случае появления различного рода помех, действующих после снятия блокирования компараторов. Помеха, действующая после снятия блокирования компараторов, смещает момент переключения формирователя импульсов относительно истинного положения, что приводит к существенным погрешностям измерения частоты и, особенно, скорости измерения частоты. При этом прогноз времени блокировки компараторов будет производиться с большими погрешностями, что на следующих шагах измерения вызовет еще большие погрешности измерения частоты вращения. Кроме этого, к недостатку устройства можно отнести его сложность, вызванную наличием двух компараторов, измерителей частоты и скорости изменения частоты, таймера.
Предлагаемое изобретение направлено на повышение надежности функционирования и упрощение схемы формирователя.
Поставленная цель достигается тем, что в формирователь импульсов из сигналов индукционных датчиков частоты вращения, содержащий компаратор и источник опорного напряжения, согласно предлагаемому изобретению введен фильтр низкой частоты RC-типа, имеющий частоту среза, находящуюся в нижней области частотного диапазона формирователя, причем к входу фильтра подключен выход индукционного датчика, выход фильтра соединен с первым входом компаратора, а второй вход компаратора соединен с источником опорного сигнала посредством аналогового мультиплексора.
Введенный в схему формирователя импульсов фильтр низкой частоты нормирует величину амплитуды входного сигнала таким образом, что она остается практически постоянной при изменении частоты вращения ротора и соответствующих изменениях частоты и амплитуды сигнала на выходе датчика. В таблице представлены амплитуды выходного сигнала датчика и сигнала на выходе фильтра низкой частоты при различных частотах вращения ротора при частоте среза фильтра, соответствующей частоте вращения ротора 1000 об/мин.
Кроме этого, фильтр не пропускает высокочастотные помехи, поступающие на вход формирователя. Фактически фильтр низкой частоты выполняет те же самые функции, что и блок измерения вольт-секундной площади, но используя минимальные схемные ресурсы. Введение фильтра низкой частоты в схему формирователя позволяет исключить из схемы один компаратор, инвертор, измерители частоты и скорости изменения частоты, таймер.
На фиг.2 приведена структурная схема предлагаемого устройства формирователя импульсов из сигналов индукционных датчиков частоты вращения. Устройство состоит из входного фильтра 1 низкой частоты, компаратора 2, источника опорного сигнала 3, аналогового мультиплексора 4. При этом вход фильтра 1 низкой частоты соединен с выходом индукционного датчика. Выход фильтра 1 соединен с первым входом компаратора 2, а второй вход компаратора 2 соединен с источником опорного сигнала 3 посредством аналогового мультиплексора 4, к управляющему входу которого подключен выходной сигнал формирователя.
Двухполярный сигнал индукционного датчика частоты вращения ес подается через фильтр 1 на первый вход компаратора 2, а на второй вход компаратора подается один из пороговых уровней от источника опорного сигнала 3. Выбор порогового уровня производится аналоговым мультиплексором 4. Выход компаратора 2 является выводом требуемого импульса.
Компаратор 2, источник опорного сигнала 3 и мультиплексор 4 могут быть реализованы в виде отдельных функциональных узлов или программно-аппаратным способом при использовании микроконтроллера, включающего компаратор, аналого-цифровой и цифро-аналоговый преобразователи.
Работает устройство следующим образом. В начале фазы подъема выходного сигнала фильтра порог гистерезиса компаратора является высоким, затем после достижения выходного сигнала фильтра уровня высокого порога компаратор срабатывает, и порог гистерезиса меняется мультиплексором на низкий. В фазе снижения выходного сигнала фильтра компаратор срабатывает после достижения этим сигналом уровня низкого порога, после чего мультиплексор подключает к опорному входу компаратора высокий уровень порога гистерезиса.
Таким образом, введение в устройство фильтра низкой частоты RC-типа с частотой среза, находящейся в нижней области частотного диапазона формирователя, обеспечивает фильтрацию высокочастотных помех и практически постоянную амплитуду выходного сигнала индукционного датчика во всей области частот вращения измеряемого ротора, существенно упрощает схему формирователя импульсов и повышает надежность его функционирования.
Использованные источники
1. Датчики теплофизических и механических параметров. Справочник./ Под общей редакцией Ю.Н. Коптева. Том 1, М., издательское предприятие журнала "Радиотехника", 1998 г., стр.52.
2. Хоровиц П., Хилл У. Искусство схемотехники. 5-е изд., Том 1, М.: Мир, 1998 г., с.259.
3. Патент RU 2173022, C2, МПК7 H03K 5/153, опубл. 27.08.2001 г.
4. Патент RU 2399154, C1, МПК H03K 5/153, G01R 23/02, опубл. 10.09.2010 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2011 |
|
RU2458459C1 |
| ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2014 |
|
RU2541095C1 |
| ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2012 |
|
RU2490787C1 |
| ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2017 |
|
RU2647676C1 |
| ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2011 |
|
RU2461121C1 |
| Устройство измерения угла опережения впрыска топлива в двигатель внутреннего сгорания | 1984 |
|
SU1173231A1 |
| ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2009 |
|
RU2399154C1 |
| ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2009 |
|
RU2400929C1 |
| МНОГОФАЗНЫЙ СЧЕТЧИК ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 1994 |
|
RU2099718C1 |
| Позиционный электропривод | 1984 |
|
SU1270859A1 |
Изобретение относится к измерительной технике и может быть использовано в системах автоматического измерения, управления и аварийной защиты, в состав которых входят датчики, вырабатывающие двухполярные сигналы, в частности индукционные датчики частоты вращения и расхода. Технический результат - повышение надежности функционирования и существенное упрощение схемы формирователя импульсов, достигается тем, что в него введен входной фильтр низкой частоты RC-типа с частотой среза, находящейся в нижней области частотного диапазона формирователя, вход фильтра соединен с выходом индукционного датчика, выход фильтра соединен с первым входом компаратора, а второй вход компаратора соединен с источником опорного сигнала посредством аналогового мультиплексора. 2 ил., 1 табл.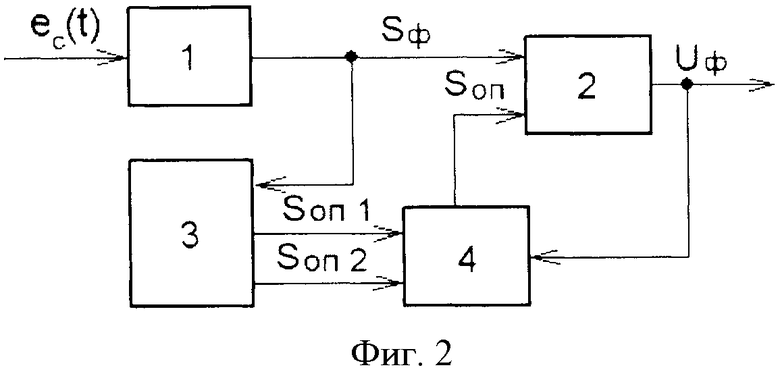
Формирователь импульсов из сигналов индукционных датчиков частоты вращения, содержащий компаратор и источник опорного напряжения, отличающийся тем, что в него введен фильтр низкой частоты RC-типа с частотой среза, находящейся в нижней области частотного диапазона формирователя, причем вход фильтра соединен с выходом индукционного датчика, выход фильтра соединен с первым входом компаратора, а второй вход компаратора соединен с источником опорного сигнала посредством аналогового мультиплексора, к управляющему входу которого подключен выходной сигнал формирователя.
| ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2009 |
|
RU2399154C1 |
| ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ОБОРОТОВ | 1999 |
|
RU2173022C2 |
| Формирователь импульсов управления электронной системой зажигания | 1985 |
|
SU1373047A1 |
| US 7782094 B2, 24.08.2010. | |||

