Д 20 подключен к выходу компаратоа (к) 19. Основной вход К 19 подключен к выходу П 17, соединенному с входом корректирующего звена 16, Опорный вход К 19 связан с выходом источника потенциала установки нулевого вращающегося момента. Электропривод содержит кольцевое устройство 23 сдвига, два входа которого соединены с выходами ФД 20, а третий вход с выходом элемента ИЛИ 11. Выходы устройства 23 подключены к управляющим входам мультиплексора (М) 27. Входы элемента ИЛИ 1I соединены с выходом запускающего блока 12 и чмпульсным выходом ЧД 10. Основные входы М 27 соединены соответственно с выходом ФД 20, выходом корректирующего эвена 16 и релейным выходом ЧД 10.
Выход М 27 соединен с силовым блоком 3, подключенным к вентильному электродвигателю 2. Первый управляющий вход М 27 соединен с одним входом элемента И, второй вход которого связан с источником 14 коррекции частоты. Выход элемента И 15 подключен к одному входу элемента ИЛИ 8, другой вход которого соединен с выходом источника 13 синхронизации. Выход элемента ИЛИ 8,подключен к второму входу сумматора 7. В позиционном электроприводе исключается ошибка при определении нейтрального фазового положения, устраняется люфт и неоднозначность статической характеристики за счех обеспечения линейности выходной характеристики П 17. 1 з.п. ф-лы, 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2016 |
|
RU2621288C1 |
| Электропривод постоянного тока | 1981 |
|
SU995247A1 |
| Стабилизированный вентильный электропривод с комбинированным управлением | 1987 |
|
SU1610588A1 |
| Стабилизированный бесконтактный двигатель с комбинированным управлением | 1987 |
|
SU1522355A1 |
| МАЛОГАБАРИТНЫЙ РАДИОЛОКАТОР ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2117964C1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| Электропривод постоянного тока | 1986 |
|
SU1661951A1 |
| Устройство для регулирования скорости электропривода | 1988 |
|
SU1539725A1 |
| СЕЛЕКТИВНОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ОДНОФАЗНЫХ ЗАМЫКАНИЙ В КАБЕЛЬНЫХ ЛИНИЯХ | 2002 |
|
RU2217769C1 |
| Синхронизируемый вентильный электродвигатель | 1985 |
|
SU1317581A1 |
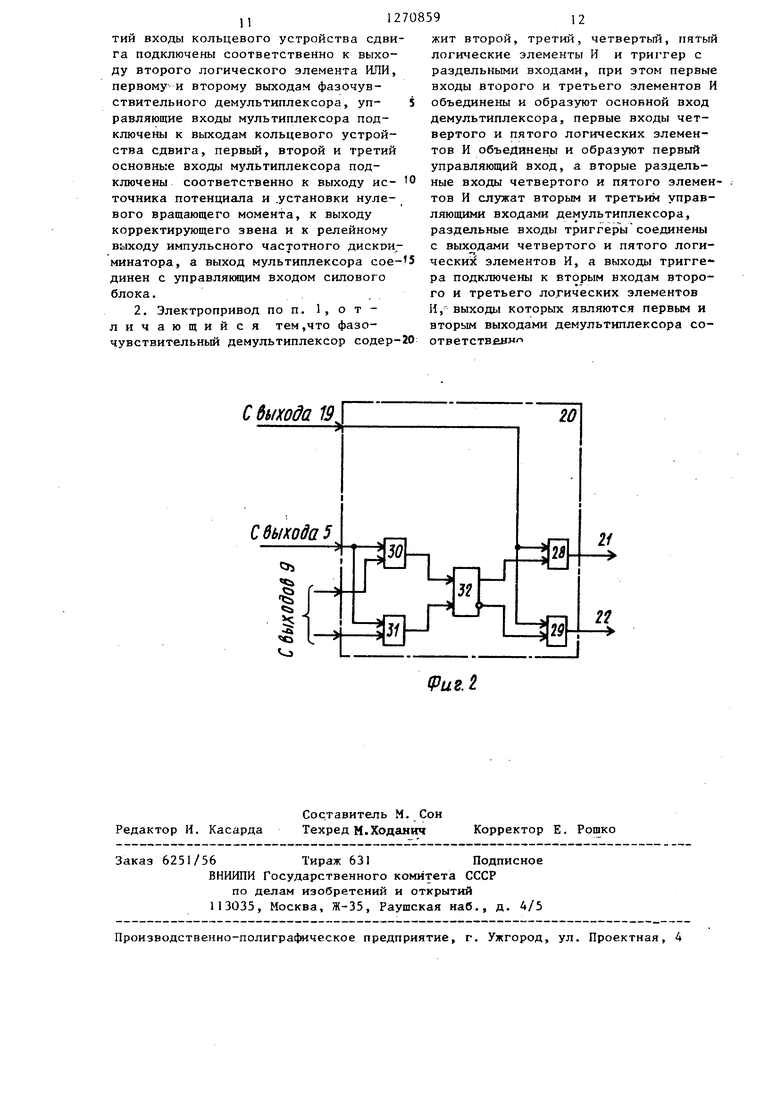
Изобретение относится к злектротехнике. Целью изобретения является улучшение качества регулирования, Позиционный электропривод постоянного тока содержит вентильный электродвигатель 2, на валу которого установлен датчик (ДП) 1 положения ротора, генератор 6 тактовых импульсов. Выход генератора 6 через первый делитель (Д) 4 частоты подключен к входу ДП 1, а через сумматор 7 - к входу второго Д 9. Выход ДП 1 через формирователь 5 прямоугольных импульсов связан с первыми выходами частотного дискриминатора (ЧД) 10, преобразователя (П) 17 разности фаз и первым управля1)Щим входом фазочувствительного демультиплексора (ФД) 20. Два других управляющих входа ФД 20 подключены соответственно к неинвертированному и инвертированному выходам Д 9. Третий вход Д 9 подключен к вторым , входам ЧД IО и П 17. Основной вход
Изобретение относится к электротехнике и может быть использовано в системах позиционного вентильного электропривода.
Цель изобретения - улучшение качестна регулирования путем повышения точности фазового согласования в широком диапазоне синхронизируемых частот.
На фиг. 1 представлена принципиальная схема позиционного электропривода; на фиг. 2 - фазочувствительиый демультиплексор.
Позиционный электропривод (фиг.1 содержит датчик 1 положения ротора электродвигателя 2, подключенного к силовому блоку 3, вход датчика положения подключен к выходу первого делителя 4 частоты, а выход соединен с входом формирователя 5 сигнала, генератор 6 тактовых импульсов, выхо которого соединен с входом первого делителя 4 частоты и с первым входом с мматора 7 частот, второй вход которого подключен к выходу первого ло гйческого элемента ИЛИ 8, выход сое- динен с входом второго делителя 9 частоты с тремя выходами, первьш из которых соединен с первым входом импульсного частотного дискриминатора 10 с импульсным и релейным выходгши, второй вход которого подключен к выходу формирователя 5 сигнала, второй
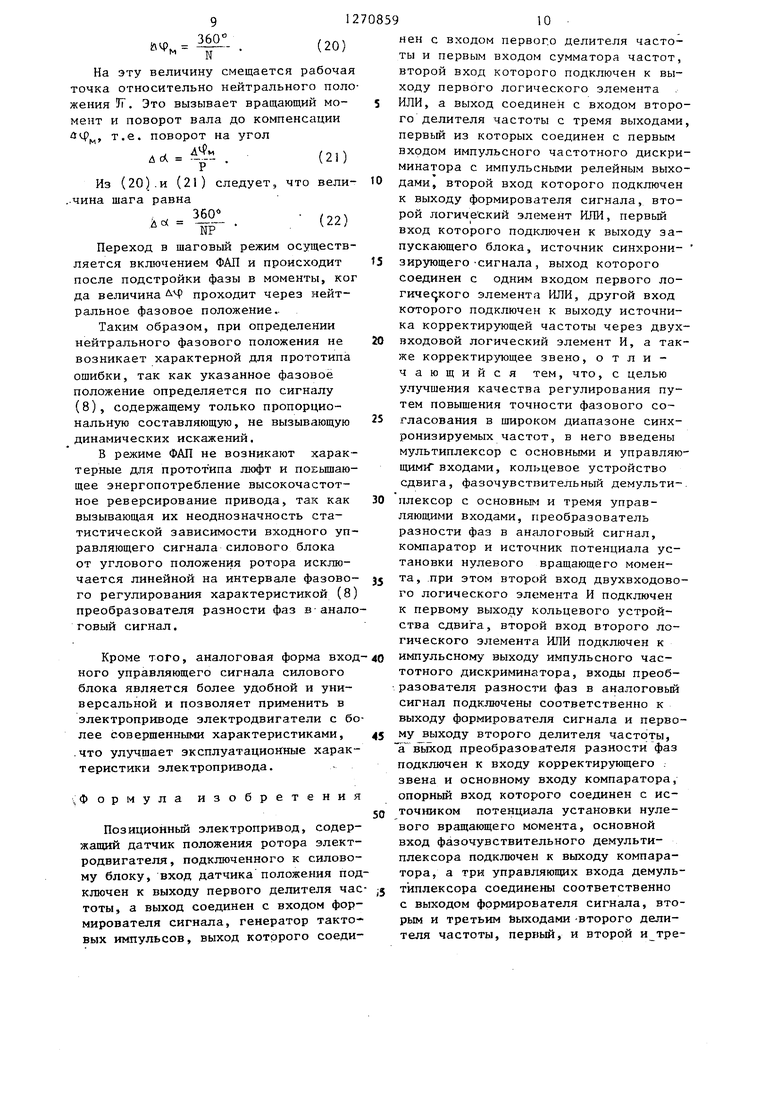
логический элемент ИЛИ 11, первый вход которого подключен к выходу запускающего блока 12, источник 13 синхронизирующего сигнала, выход которого соединен с одним входом первого логического элемента ИЛИ 8, другой вход которого подключен к выходу источника 14 корректирующей частоты через двухвходовой логический элемент И 15, корректирующее звено 16, преобразователь 17 разности фаз в аналоговый сигнал, источник 18 потенциала установки нулевого вращающего момента, компаратор 19 с импульсным выходом, фазочувствительный демультиплексор 20 с первым 2 и вторым 22 выходами, кольцевое устройство 23 сдвига с первым 24, вторым 25 и третьим 26 выходами и мультиплексор 27. При этом второй вход первого логического элемента И 15 подключен к первому выходу 24 кольцевого устройства 23 сдвига. Второй вход второго логического элемента ИЛИ 11 подключен к импульсному выходу импульсного частотного дискриминатора 10, фиксирующему момент равенства частот. Преобразователь 17 разности фаз в аналоговый сигйал подключен к выходу формирователя 5 сигнала датчика положения ротора и первому выходу второго де-; лителя 9 частоты, а выход указанного преобразователя подключен к входу корректирующего звена и основному входу компаратора 19, опорный вход которого соединен с источником 18 потенциала установки нулево. враща щего момента. Основной вход фазочув ствительного демультиплексора 20 подключен к выходу компаратора 19. Три управляющих входа соединены соответственно с выходом формировател 5 сигнала положения датчика ротора, вторым и третьим выходами второго делителя 9 частоты. Первый, второй третий входы кольцевого устройства сдвига подключены соответственно к выходу второго логического элемента ИЛИ 11, первому 21 и второму 22 выхо дам фазочувствительного демультиплексора 20, управляющие входы мультиплексора 27 подключены к выходам кольцевого устройства 23 сдвига. Пер вый, второй и третий основные входы мультиплексора 27 подключены соответственно к выходу источника 18 потенциала установки нулевого вращающе го момента, к выходу корректирующего звена 16 и к релейному выходу импульсного частотного дискриминатора 10. Выход мультиплексора 27 соединен с управляющим входом силового блока 3. Фазочувствительньш демультиплексо 20 (фиг. 2) содержит второй 28, третий 29, четвертьй 30, пятый 31 логические элементы И и триггер 32 с раздельными входами. При этом первые входы второго 28 и третьего 29 элементов И объединены и образуют основ ной .вход демультиплексора, подключенный к выходу компаратора 19, первые входы четвертого 30 и пятого 31 элементов И обг единены с образуют :первый управляющий вход демультиплек сора, подключенный к выходу формирователя 5 сигнала датчика положения ротора. Вторые входы четвертого 30 и пятого 31 элементов И служат вторым и третьим управляющими входами демультиплексора, подключенными соот ветственно, к второму и третьему выхо дам второго делителя 9 частоты. Раздельные входы триггера 32 соединены с выходами четвертого 30 и пя того 31 логических элементов И. Выходы триггера 32 подключены к вторым входам второго 28 и третьего 29 логи ческих элементов И, выходы которых являются первым 21 и вторым 22 выходами демультиплексора соответственно 94 Датчик 1 положения ротора представляет собой фазовращатель, которьй запитывается частотой f. /N. Частота .выходного сигнала отличается от частоты входного на величину, пропорциональную частоте вращения ротора. Формирователь 5 частоту не меняет, а служит для подавления помех и формирования прямоугольных импульсов. Позиционный, электропривод рабо-iтает следуюощм образом. С выхода генератора 6 тактовые импульсы с частотой fg поступают на входы сумматора 7 и делителя 4 частоты. На выходе делителя 4 частота f. определяется выражением N где N - коэффициент деления делителя 4. Сигнал f поступает на датчик I оложения ротора, частота выходного игнала которого так же, как и на ыходе формирователя 5, определяется ыражением -t- PF f --г f -I- PF l. NS f де - частота вращения; P - коэффициент (знак определяется направлением вращения ) . Отсюда следует 5-% , (3) де Ч - фаза входного сигнала датчика, т.е. на выходе делителя 4; , - фаза выходного сигнала датчика 1 ; - фаза выходного сигнала формирователя 5; угловое положение ротора. Такой сигнал обеспечивает высокую астоту поступления информации об уговом положении и частоте вращения отора в неограниченном диапазоне астоты вращения, в том числе и при 0. Частота выходного сигнала сумматоа 7 частот определяется выражением f,f6tf, ,(4) де С частота генератора 6 тактовых импульсов; fg - частота выходного сигнала логического элемента ИЛИ 8 (знак определяется заданным направлением вращения). Соответственно на выходе делителя частота определяется выражением f Ib . f 6. i 9 N N .где N - коэффициент деления делителя 9, такой же, как и делителя 4. Сигналы (2) и (5) поступают на входы импульсного частотного дискриминатора 10, который имеет два выхода. Релейный выход имеет характеристику; при на релейном выходе сигнал +U; при на релейном выходе сигнал -и.(6) На импульсном выходе, фиксирующем момент равенства частот, появляется короткий импульс при прохождении через точку равенства частот f f,j , т.е. при fj fg сигнал отсутствует, при fj fg появляется короткий импульс . (7) Сигналы (2) и (5) поступают на входы преобразователя 17 разности фаз в аналоговый сигнал, которьй на интервале (0-27г) определяется выраже и„ ()K, (ДФ-ТГ), где К,, - коэффициент Ч - разность фаз, определяется выражением (9) ДЦ) Ч5-фд, фаза выходного сигнала дели теля 9; фаза выходного сигнала формирователя 5, Сигнал (8) поступает на корректи рующее звено 16 и на основной вход компаратора 19 с импульсным выходом На опорный вход компаратора 19 посту пает сигнал с выхода источника 18 по тенциала установки нулевого вращающего момента. Этот потенциал опреде ляется выражением U,g и„ (ДЧ), (10 при ЛЦ1 , И В частном случае (8) U,j 0. На выходе компаратора I9 появляе ся короткий импульс в момент выполнения равенства его входных сигнало т.е. при Ц сигнал отсутствуе при и появляется короткий импульс. .(11) Таким образом, как следует из (8), (10), (11) короткие импульсы появляются на выходе компаратора пр прохождении рабочей точки через ...0,Oi,2J, Эти импульсы поступают на основной вход фазочувствительного демультиплексора 20, т.е. на первые входы элементов И 28 и 29 (фиг. 2). От делителя 9 частоты на второй вход элемента И 31 поступают неинвертированные импульсы. На второй вход элемента И 30 от делителя 9 поступает инвертированный сигнал. Сначала совпадают по времени входные импульсы элемента И 31, а потом, в связи с изменением дЦ, - входные импульсы элемента И 3D. В результате сначала импульсы с выхода элемента И 31, а потом с выхода элемента И 30 устанавливают триггер 32 соответственно в состояние О и 1. Выходные сигналы триггера управляют элементами И 28 и 29. При этом поступающие на них с выхода компаратора 19 импульсы разделяются на две последовательности, соответствующие двум выходам 21 и 22 демультиплексора 20: при } 1 0; при Ц) Ujg 1 - короткий импульс; при .2T u,i короткий импульс; где ,1,2,3.... В момент включения на вьсходе запускающего блока 12 появляется импульс, который, проходя через логический элемент ИЛИ 1I, устанавливает кольцевое устройство 23 сдвига в состояние 1. На его выходе 24 появляется сигнал I, а на выходе 25 и 26 - сигнал О. Эти сигналы, поступая на управляющие входы мультиплексора 27, устанавливают последний в состояние 1, при котором через него на управляющий вход силового блока 3 проходит сигнал с источника 18 потенциала , „(12) что приводит к выключению питания двигателя 2. Сигнал 1 с выхода 24 открывает, элемент И 15, через который при этом проходят короткие импульсьГ с источника 14 частоты на вход элемента ИЛИ 8. На другой вход этого элемента поступают короткие импульсы от источника 13 синхронизирующего сигнала. На выходе элемента ИЛИ 8 .средняя частота равна сумме входных частот, Сигнал (13) поступает на вход сумматора 7 частот. Как следует из (2),.(5), (13) разность частот выходных сигналов формирователя 5 сигнала датчика и делител 9 частоты определяется выражением
,дГ t-Xii f
14
-i PF.
N в частности, при частоте вращения в момент включения 0 и заданной вели - t - Jlчине f 0 она. равна д f t В момент включения разность фаз 44 (9) - случайная величина и далее меняется в соответствии с величиной Af, т.е. происходит подстройка фазы (ПФ). Скачок рабочей точки происходит в момент, соответствующий переходу из одной зоны фазового регулирования в другую. При этом, в соответствии с (1I) на выходе 22 демультиплексора 20 появляется импульс, который не может изменить состояние кольцевого устройства 23 сдвига. В момент, когда рабочая точка про ходит через Т , на выходе 21 демульти плексора 20 появляется импульс, кото рый переключает кольцевое устройство 23 сдвига в состояние, при котором на выходе 25 появляется сигнал 1, а на выходах 24 и 26 - сигналы О. Эти сигналы, поступая на управляющие входы мультиплексора 27, устанавливают его в состояние, при котором через него на управляющий вход силового блока 3 проходит сигнал с выхода корректирующего звена 16, т.е. и,,, ,(16) включается режим фазовой автоподстройки (ФА11). При этом сигнал О с выхода 24 закрывает элемент И 15. Частота сигнала на выходе элемента ИЛИ 8 опреде ляется теперь равенством т.е. на сумматор 7 частот поступает только синхронизирующий сигнал источ ника 13. Если частота источника 13 синхронизирующего сигнала равна нулю т.е. задана нулевая частота вращения то двигатель 2 стопорится и работает как электромеханическая пружина, сопротивляясь повороту вала. При этом электромеханический момент М пропорционален величине Fgp . Если при включении задана некоторая частота вращения, то двигатель начинает вращаться В установившемся режиме входные частоты преобразователя I7 разности фаз в аналоговый сигнал равны, т.е. f - j ,. 5 : 1270359
у - (14;
(19)
Р PN (18) 8 11ри этом из (17), (2), (5) следуВ установившихся режимах величина FfK отслеживает изменяющуюся частоту синхронизирующего сигнала f . В момент, когда рабочая точка проходит через 2Т, т.е. выходит из зоны фазового регулирования, на выходе 22 демультиплексора 20 появляется импульс, который переключает кольцевое устройство 23 сдвига в состояние, при котором на выходе 26 появляется сигнал Т, а на выходах 24 и 25 - сигналы О. Эти сигналы, поступая на управляющие входы мультиплексора 27, устанавливают его в состояние, при котором через.него на управляющий вход силового блока 3 проходит сигнал с релейного выхода импульсного частотного дискриминатора 10, т.е. включается режим частотной автоподстройки (ЧАП). При этом на двигатель подается полное напряжение питания. В момент, когда частота вращения достигает новой заданной величины, частоты на входах дискриминатора 10 выравниваются и на- его импульсном выходе появляется импульс, который переключает кольцевое устройство 23 сдвига в состояние 1. В этом состоянии на выходе 24 появляется сигнал 1, а на выходах 25 и 26 - сигналы О. Эти сигналы, оступая на управляющие входы мультилексора 27, устанавливают его в состояние, при котором его.выходной сигнал определяется вьфажением (12), л-о приводит к выключению питания двигателя. Происходит быстрая подстройка фазы. Б момент, когда рабочая точка проходит ЭГ , на выходе 21 демультиплексора 20 появляется импульс, который переключает кольцевое устройство 23 сдвига. Включается режим ФЛП, при котором после окончания переходного процесса устанавливается некоторая постоянная величина ЛФ , соответствующая установившемуся электромеханическому моменту и частоте вращения. Если подавать одиночные импульсы, то электропривод отрабатывает их, как шаговый электропривод. Действительно, при подаче импульса от источника 13 фаза сигнала на выходе делителя 19 изменяется на величину На эту величину смещается рабочая точка относительно нейтрального поло жения )Т. Это вызывает вращающий момент и поворот вала до компенсации поворот на угол л Н Д Л -р- . Из (20).и (21) следует, что величина шага равна тр- Переход в шаговый режим осуществляется включением ФАЛ и происходит после подстройки фазы в моменты, ког да величина л-Ч проходит через нейтральное фазовое положение.. Таким образом, при определении нейтрального фазового положения не возникает характерной для прототипа ошибки, так как указанное фазовое положение определяется по сигналу (8), содержащему только пропорциональную составляющую, не вызывающую динамических искажений. В режиме ФАЛ не возникают характерные для прототипа люфт и повышающее энергопотребление высокочастотное реверсирование привода, так как вызывающая их неоднозначность статистической зависимости входного управляющего сигнала силового блока от углового положения ротора исключается линейной на интервале фазового регулирования характеристикой (8 преобразователя разности фаз в-анало говый сигнал. Кроме того, аналоговая форма вхо ного управляющего сигнала силового блока является более удобной и универсальной и позволяет применить в электроприводе электродвигатели с б лее совершенными характеристиками, .что улучшает эксплуатационные харак теристики электропривода. .Формула изобретени Позиционный электропривод, содер жашяй датчик положения ротора элект родвигателя, подключенного к силово му блоку, вход датчика положения по ключен к выходу первого делителя ча тоты, а выход соединен с входом фор мирователя сигнала, генератор такто вых импульсов, выход которого соеди 1 10 нен с входом первого делителя частоты и первым входом сумматора частот, второй вход которого подключен к выходу первого логического элемента ИЛИ, а выход соединен с входом второго делителя частоты с тремя выходами, первый из которых соединен с первым входом импульсного частотного дискриминатора с импульсными релейным выходами, второй вход которого подключен к выходу формирователя сигнала, второй логический элемент ИЛИ, первьш вход которого подключен к выходу запускающего блока, источник синхронизирующего-сигнала, выход которого соединен с одним входом первого логичес кого элемента ИЛИ, другой вход которого подключен к выходу источника корректирующей частоты через двухвходовой логический элемент И, а также корректирующее звено, отличающийся тем, что, с целью улучшения качества регулирования путем повышения точности фазового согласования в широком диапазоне синхронизируемых частот, в него введены мультиплексор с основными и управляюЩИМ1Г входами, кольцевое устройство сдвига, фазочувствительный демульти-. плексор с основным и тремя управляющими входами, преобразователь разности фаз в аналоговый сигнал, компаратор и источник потенциала установки нулевого вращающего момента, при этом второй вход двухвходового логического элемента И подключен к первому кольцевого устройства сдвига, второй вход второго логического элемента ИЛИ подключен к импульсному выходу импульсного частотного дискриминатора, входы преобразователя разности фаз в аналоговьй сигнал подключены соответственно к выходу формирователя сигнала и первому выходу второго делителя частоты, а выход преобразователя разности фаз подключен к входу корректирующего . звена и основному входу компаратора, опорный вход которого соединен с источником потенциа.ла установки нулевого вращающего момента, основной вход фазочувствительного демультиплексора подключен к выходу компаратора, а три управляющих входа демультиплексора соединены соответственно с выходом формирователя сигнала, вторым и третьим йыходами -второго делителя частоты, первый, и второй и третий входы кольцевого устройства сдвига подключены соответственно к выходу второго логического элемента ИЛИ, первому и второму выходам фазочувствительного демультиплексора, управляющие входы мультиплексора подключены к выходам кольцевого устройства сдвига, первый, второй и третий основные входы мультиплексора подключены соответственно к выходу неточника потенциала и .установки нулевого вращающего момента, к выходу корректирующего звена и к релейному выходу импульсного частотного дискри;минатора, а выход мультиплексора соединен с управляющим входом силового блока.
И
&
-
2
-
Риг.2
| Трахтенберг Р,М, Импульсные астатические системы электропривод с дискретным управлением, М.: Энер гия, 1982 | |||
| Импульсный частотно-фазовый дискри-МиНАТОР | 1979 |
|
SU843163A2 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Известия Вузов, Приборостро ние, 1966, с, 44-48, | |||
| Букреев И.Н., Мансуров Б.М., Го рячев В.И | |||
| Микроэлектронные схемы цифровых устройств | |||
| М.: Советское радио,.1975, с, 214, рис | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод постоянного тока | 1981 |
|
SU995247A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
