Предлагаемое устройство относится к области подповерхностной радиолокации, а именно к устройствам определения расположения и формы неоднородностей и включений в строительных конструкциях и сооружениях, и может найти применение в следующих областях:
- контрразведывательной деятельности по выявлению подслушивающих устройств;
- оперативно-розыскной деятельности правоохранительных органов;
- зондировании строительных конструкций с целью определения положения арматуры, пустот и других неоднородностей;
- зондировании особо ответственных строительных сооружений (взлетно - посадочных полос, аэродромов, мостов, переходов, тоннелей метрополитена, вокзалов, стадионов и т.д.) с целью определения скрытых дефектов в них.
Известны устройства зондирования строительных конструкций (авт. свид. СССР №№321783, 344391, 385251, 397877, 455307, 708277, 746370, 817640, 1078385, 1092453, 1100603, 1151900, 1247805, 1300396, 1594477, 1721566; патенты РФ №№2044331, 2105330, 2121671, 2158015, 2234694, 2282875; патент ФРГ №2360778; патент Японии №57-17273; патент WO №2004102222; Петровский А.Д. Радиоволновые методы в подземной геодезии. - М., 1971; Дикарев В.И., Заренков В.А., Заренков Д.В. Методы и средства обнаружения объектов в укрывающих средах. Спб.: Наука и техника, 2004, 280 с и другие).
Из известных устройств наиболее близким к предлагаемому является «Устройство зондирования строительных конструкций» (патент РФ № 2234694, G01N 22/02, 2002), которое и выбрано в качестве базового объекта.
Известное устройство позволяет повысить точность, разрешающую способность, надежность обнаружения и идентификации неоднородностей и включений в строительных конструкциях. Это достигается путем исключений отражений от границы раздела воздух - строительная конструкция, квазистационарной составляющей, периодических вариаций электромагнитного поля Земли и использования последовательности радиоимпульсов с малым числом периодов высокочастотных колебаний в каждом из них (вплоть до одного).
Использование сигналов малой длительности в качестве зондирующих сигналов определяет ряд специфических особенностей их регистрации. Вместе с тем, периодичность следования отраженных сигналов позволяет использовать стробоскопический метод обработки сигналов. Сущность данного метода заключается в том, что осуществляется регистрация не самого отраженного сигнала, а его отдельных выборок, каждая из которых формируется в различные периоды повторения данного сигнала.
В известном устройстве сформированный в приемнике 7 импульс, представляющий собой мгновенное значение принятого периодического сигнала, через линию 12 задержки поступает на второй вход триггера 11. Последний переводится во второе (единичное) состояние, при котором на его выходе формируется положительное напряжение. Это напряжение поступает на управляющий вход ключа 22 и открывает его. В исходном состоянии ключ 22 всегда закрыт.
Линия 12 задержки необходима для наиболее полного управления влиянием отражений от границы раздела сред на работу усилителя 13 и последующих каскадов. Линия 12 задержки выбирается переменной, что обеспечивает устранение влияния прямого излучения передающей антенны 8 и сигналов, отраженных от границы раздела воздух - строительная конструкция и от слоев различной глубины залегания, т.е. осуществляется «стробирование по вертикали», которое обеспечивает последовательный просмотр подповерхностного пространства строительной конструкции от границы раздела воздух - строительная конструкция до слоев различной глубины.
Однако изменение линии 12 задержки осуществляется оператором вручную и она не обеспечивает автоматического определения глубины залегания неоднородностей и включений в строительной конструкции, что не позволяет точно определить место положения указанных неоднородностей и включений.
Технической задачей изобретения является повышение надежности обнаружения и идентификации подповерхностных объектов путем автоматического определения глубины их расположения в строительных конструкциях.
Поставленная задача решается тем, что устройство зондирования строительных конструкций, содержащее в соответствии с ближайшим аналогом последовательно включенный высокочастотный генератор, выполненный в виде генератора ударного возбуждения, и передающую антенну, последовательно включенные приемную антенну, приемник высокочастотного сигнала, ключ, второй вход которого через триггер соединен со вторым выходом высокочастотного генератора, усилитель, линию задержки, блок вычитания, второй вход которого соединен с выходом усилителя, интегратор, блок деления, второй вход которого соединен с выходом блока вычитания, блок сравнения, второй вход которого соединен с выходом блока формирования эталонного напряжения, и аналого-цифровой преобразователь, выход которого через интерфейс связан с портативной ЭВМ, при этом соответствующие выходы интерфейса подключены к высокочастотному генератору, приемнику высокочастотного сигнала, блоку формирования этальнного напряжения, звуковому и жидкокристаллическому индикаторам, передающая и приемная антенны объединены в антенный блок, отличается от ближайшего аналога тем, что оно снабжено блоком автоматической регулируемой задержки, перемножителем, фильтром нижних частот, экстремальным регулятором и индикатором глубины залегания подповерхностного объекта, причем к второму выходы высокочастотного генератора последовательно подключены блок автоматической регулируемой задержки, перемножитель, второй вход которого соединен с выходом приемника высокочастотного сигнала, фильтр нижних частот и экстремальной регулятор, выход которого соединен с вторым входом блока автоматической регулируемой задержки, второй выход которой подключен ко второму входу триггера и индикатору глубины залегания подповерхностного объекта.
Структурная схема устройства зондирования строительных конструкций представлена на чертеже. Устройство включает в себя: 1 - портативную ЭВМ; 2 - поверхность строительной конструкции; 3 - электронный блок в составе высокочастотного генератора 5 и приемника 7 высокочастотного сигнала; 4 - антенный блок, включающий пространственно совмещенные передающую антенну 8 и приемную антенну 9, 6 - контроллер по обработке и вводу данных в ЭВМ; 10 - объект, в качестве которого могут быть строительная арматура, пустоты и другие неоднородности, различные дефекты, подслушивающие устройства и. т.д.; 12 - коррелятор, 14 - линия задержки; 13 - усилитель; 15 - блок вычитания, 16 - интегратор, 17 - блок деления, 18 - блок формирования эталонного напряжения, 19 - блок сравнения, 20 - аналого-цифровой преобразователь, 21 - интерфейс, 22 - ключ, 24 - звуковой индикатор, 23 - жидкокристаллический индикатор, блок 25 автоматической регулируемой задержки, переключатель 26, фильтр 27 нижних частот, экстремальный регулятор 28 и индикатор 29 глубины залегания подповерхстного объекта.
Причем к высокочастотному генератору 5 подключена передающая антенна 8. К выходу приемной антенны 9 последовательно подключены приемник 7 высокочастотного сигнала, ключ 22, второй вход которого соединен с выходом триггера 11, усилитель 13, линия 14 задержки, блок 15 вычитания, второй вход которого соединен с выходом усилителя 13, интегратор 16, блок 17 деления, второй вход которого соединен с выходом блока 15 вычитания, блок 18 сравнения, второй вход которого соединен с выходом блока 19 формирования эталонного напряжения, аналого-цифровой преобразователь 20, интерфейс 21 и ЭВМ 1. Соответствующие выходы интерфейса 21 подключены к высокочастотному генератору 5, приемнику 9 высокочастотного сигнала, блоку 19 формирования эталонного напряжения, звуковому 24 и жидкокристаллическому 23 индикаторам.
К выходу приемника 7 высокочастотного сигнала последовательно подключены перемножитель 26, второй вход которого через блок 25 автоматической регулируемой задержки соединен со вторым выходом высокочастотного генератора 5, фильтр 27 нижних частот и экстремальный регулятор 28, выход которого соединен со вторым входом блока 25 автоматической регулируемой задержки, к второму выходу которого подключены второй вход генератора 11 и индикатор 29 глубины залегания подповерхностного объекта.
Блок 25 автоматической регулируемой задержки, перемножитель 26, фильтр, 27 нижних частот и экстремальный регулятор 28 образуют коррелятор 12.
Принцип работы устройства основан на методе сверхширокополосного радиолокационного зондирования строительных конструкций, при котором оценивается изменение нестационарного электромагнитного поля, образованного отраженными от различных неоднородностей и включений электромагнитными волнами после их облучения зондирующим радиосигналом, в качестве которого используется последовательность радиоимпульсов с малым числом периодов высокочастотных колебаний в каждом из них (вплоть до одного). Формирование зондирующего сверхширокополосного радиосигнала осуществляется генератором 5 ударного возбуждения и передающей антенной 8. На границе раздела строительная конструкция - неоднородность, характеризующейся скачком относительной диэлектрической проницаемости и удельного затухания, формируется отраженный радиосигнал, возвращающийся к приемной антенне 9. Принимаемый сверхширокополосный радиосигнал с помощью стробоскопического приемника 7 претерпевает масштабно-временное преобразование и переводится в цифровую форму, удобную для представления и обработки. Цифровой сигнал содержит информацию как о расположении неоднородности и включений, так и о их форме, материале и т.п. Выделение полезной информации осуществляется с помощью обработки в ЭВМ 1 и отображается на экране визуального индикатора 23 в реальном масштабе-времени.
Устройство зондирования строительных конструкций работает следующим образом.
Основным режимом работы устройства является режим "Поиск". Этот режим устанавливается автоматически при включении устройства и используется при поиске и распознавании различных неоднородностей и включений, находящихся в строительных конструкциях.
При включении напряжения устанавливаются исходные режимы всех блоков устройства. По команде ЭВМ 1 генератор 5 ударного возбуждения формирует зондирующий сверхширокополосный сигнал в виде одного периода синусоиды амплитудой 20 В и длительностью 1 нс, излучаемый передающей антенной 8 в направлении поверхности 2 строительной конструкции.
Обнаружение неоднородностей и включений в режиме «Поиск» осуществляется оператором путем перемещения вправо - влево, вперед - назад антенного блока 4, укрепленного на штанге и включающего пространственно совмещенные передающую 8 и приемную 9 антенны. При этом необходимо следить за тем, чтобы антенный блок 4 перемещался параллельно обследуемой поверхности 2 строительной конструкции на фиксированном расстоянии (5…10 см от нее). Скорость перемещения антенного блока 4 выбирается в зависимости от условий поиска и конфигурации строительной конструкции. При этом необходимо следить за тем, чтобы был обследован весь проверяемый участок поверхности 2 конструкции.
Электромагнитная волна, отражающаяся от неоднородности 10, воздействует на приемную антенну 9. На эту же антенну воздействуют мешающие прямое излучение генератора 5 и отраженный сигнал от границы раздела воздух - строительная конструкция. Часть энергии зондирующего сигнала с второго выхода высокочастотного генератора 5 поступает на первый вход триггера 11, который переводится в первое (нулевое) состояние. На выходе триггера 11 формируется отрицательно напряжение.
Отраженный сигнал, содержащий информацию о границе раздела сред и неоднородности 10, с выхода приемной антенны 9 поступает на первый вход приемника 7, на второй вход которого подается через интерфейс 21 короткий строб - импульс с ЭВМ 1.
Часть энергии зондирующего сигнала со второго (опорного) выхода высокочастотного генератора 5 одновременно поступает через блок 25 автоматической регулируемой задержки, обеспечивающий переменную временную задержку τ, на первый вход перемножителя 26, на второй вход которого подается отраженный сигнал с выхода приемника 7, время запаздывания которого определяется выражением:
 ,
,
где h - глубина расположения подповерхностного объекта;
С - скорость распространения радиоволн.
Полученное на выходе перемножителя 26 напряжение пропускается через фильтр 27 нижних частот, на выходе которого формируется корреляционная функция R(τ). Экстремальный регулятор 28, предназначенный для поддержания максимального значения корреляционной функции R(τ) и подключенный к выходу фильтра 27 нижних частот, воздействует на управляющий вход блока 25 автоматической регулируемой задержки и поддерживает вводимую им задержку τ, равную τз (τ=τз), что соответствует максимальному значению корреляционной функции R(τ).
Шкала индикатора 29, подключенного ко второму выходу блока 25 автоматической регулируемой задержки, позволяет непосредственно считывать измеренное значение глубины расположения подповерхностного объекта в строительной конструкции.

Сформированный на втором выходе блока 25 автоматической регулируемой задержки импульс, соответствующий временной задержке τ>τз, поступает на второй вход триггера 11.
Последний переводится во второе (единичное) состояние, при котором на его выходе формируется положительное напряжение. Это напряжение поступает на управляющий вход ключа 22 и открывает его. В исходном состоянии ключ 22 всегда закрыт. Коррелятор 12 автоматически определяет глубину залегания подповерхностного объекта и обеспечивает устранение влияния прямого излучения передающей антенны 8 и сигналов, отраженных от границы раздела воздух - строительная конструкция и от слоев различной глубины залегания, т.е. осуществляется «стробирование по вертикали», которое обеспечивает последовательный просмотр подповерхностного пространства строительной конструкции от границы раздела воздух - строительная конструкция до слоев различной глубины.
«Стробирование по горизонтали » позволяет на фоне вариаций электромагнитного поля, не связанных с электромагнитной волной, отражающейся от неоднородности или включения, надежно выделять в подповерхностных слоях строительной конструкции неоднородности, включения и т.п. Для исключения влияния периодических и квазистационарных вариаций электромагнитного поля Земли осуществляется периодическое измерение напряженности поля и операция нормирования разностного сигнала двух последовательных измерений, т.е. интегрируется разностный сигнал, делится разностный сигнал на проинтегрированный разностный сигнал. Операция сравнения нормированного сигнала с заданным пороговым значением позволяет принять решение о наличии или отсутствии неоднородности или включения.
Для этого сформированный в приемнике 7 импульс, представляющий собой мгновенное значение принимаемого периодического сигнала, отраженного от неоднородности 10, через открытый ключ 22 после усиления в усилителе 13 поступает на блок 15 вычитания непосредственно и через линию 14 задержки. При этом в каждой точке наблюдения производится не менее двух последовательных измерений указанных импульсов. Затем производится операция вычитания двух последовательных измерений. Для этого импульс, соответствующий предшествующему измерению, задерживается линией 14 задержки до момента сравнения его с последующим импульсом в блоке 15 вычитания. Операции интегрирования разностного сигнала и деление разностного сигнала на проинтегрированный разностный сигнал производится в блоках 16 и 17. В блоке 18 осуществляется сравнение нормированного сигнала с пороговым значением сигнала, формируемым блоком 19. При превышении порогового уровня сигнал поступает на вход аналого-цифрового преобразователя 20, где он преобразуется в цифровую форму и поступает через интерфейс 21 на ЭВМ 1.
После аналого-цифрового преобразования данные через плату интерфейса 21 поступают в ЭВМ 1, а затем на экран жидкокристаллического индикатора 23, частоты вертикальной (строчной) и горизонтальной (кадровой) разверток которого могут варьироваться в определенных пределах. На экране индикатора 23 в реальном масштабе времени наблюдается плоская яркостная картина неоднородности и включений исследуемой строительной конструкции.
Максимальная амплитуда принимаемого сигнала сравнивается с установленным пороговым значением, при превышении которого включается звуковой индикатор 24.
Появление звукового сигнала и визуального сигнала на экране требует остановки оператора и свидетельствует о том, что в зоне обнаружения антенного блока 4 находится неоднородность и включение, природу происхождения которой следует установить, а при необходимости, уточнить ее местоположение и форму.
Для анализа обнаруженной неоднородности следует выполнить ее сканирование (перемещение антенного блока 4 от границы обнаружения до границы потери) со скоростью, определяемой световой строкой на экране индикатора 23. Режим «Сканирование» и формирование вертикального среза строительной конструкции с обнаруженной неоднородностью осуществляется переходом из режима «Поиска» нажатием кнопки «Сканирование», расположенной на передней панели устройства. Через 20 с после обработки сигнала на экране индикатора 23 появляется радиолокационный образ неоднородности или включения, дающий представление о форме и размерах неоднородности (включения).
По желанию оператора контрастность изображения можно изменять соответствующими кнопками в сторону увеличения или уменьшения.
Для идентификации обнаруженной неоднородности с имеющимися эталонами оператору необходимо обратиться к обучаемому алгоритму, при этом на экране индикатора 23 при идентификации обнаруженной неоднородности с имеющимся в памяти ЭВМ 1 эталоном высвечивается соответствующее название, например «неоднородность №2». В случае несоответствия выводится сообщение «неоднородность не опознана».
Для определения материала обнаруженной неоднородности (включения) оператор нажатием соответствующей кнопки переходит к базовому алгоритму. На экране выводится сообщение о типе материала: «Металл», «Композит», «Пластик» и т.д.
Нажатием кнопки «Сканирование» и перемещение антенного блока 4 над неоднородностью (включением) дает возможность провести при необходимости повторное обследование неоднородности (включения) по критерию базового и обучаемого алгоритмов.
Идентификация обнаруженной неоднородности (включения) по обучаемому алгоритму, распознавание типа материала по базовому алгоритму, анализ оператором изображения и «среза» неоднородности (включения) позволяет оператору принять решение о дальнейших действиях относительно обнаруженной неоднородности (включения) и продолжения разведки.
Взаимодействие ЭВМ 1 с остальными узлами устройства, а также организация управления работой осуществляется через схемы интерфейса 21.
Органы управления, коммутации и индикации вынесены на общую панель управления. Различные варианты использования дисплея в режиме поиска, а также работа устройства во вспомогательных режимах не изменяют сути описанных физических процессов, а определяются только программой работы ЭВМ 2.
Предлагаемое устройство позволяет повысить точность, разрешающую способность, надежность обнаружения и идентификации неоднородностей и включений в строительные конструкции. Это достигается путем исключения отражений от границы раздела воздух - строительная конструкция, квазистационарной составляющей, периодических вариаций электромагнитного поля Земли и использования последовательности радиоимпульсов с малым числом периодов высокочастотных колебаний в каждом из них (вплоть до одного).
Использование сигналов малой длительности в качестве зондирующих сигналов определяет ряд специфических особенностей их регистрации. Вместе с тем, периодичность следования отраженных сигналов позволяет использовать стробоскопический метод обработки сигналов. Сущность данного метода заключается в том, что осуществляется регистрация не самого исследуемого сигнала, а его отдельных выборок, каждая из которых формируется в различные периоды повторения данного сигнала.
Таким образом, предлагаемое устройство по сравнению с базовым объектом и другими устройствами аналогичного назначения обеспечивает повышение надежности обнаружения и идентификации подповерхностных объектов. Это достигается путем автоматического определения глубины расположения подповерхностных объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ЗОНДИРОВАНИЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ | 2012 |
|
RU2533311C2 |
| СИСТЕМА ДИСТАНЦИОННОГО КОНТРОЛЯ И ДИАГНОСТИКИ СОСТОЯНИЯ КОНСТРУКЦИЙ И ИНЖЕНЕРНО-СТРОИТЕЛЬНЫХ СООРУЖЕНИЙ | 2011 |
|
RU2473873C1 |
| УСТРОЙСТВО ЗОНДИРОВАНИЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ | 2015 |
|
RU2589886C1 |
| СИСТЕМА МОНИТОРИНГА БЕЗОПАСНОЙ ЭКСПЛУАТАЦИИ ЗДАНИЙ И ИНЖЕНЕРНО-СТРОИТЕЛЬНЫХ СООРУЖЕНИЙ | 2011 |
|
RU2472129C1 |
| УСТРОЙСТВО ЗОНДИРОВАНИЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ | 2015 |
|
RU2589746C1 |
| УСТРОЙСТВО ЗОНДИРОВАНИЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ | 2005 |
|
RU2282875C1 |
| СПОСОБ ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2537092C2 |
| УСТРОЙСТВО ЗОНДИРОВАНИЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ | 2002 |
|
RU2234694C2 |
| ГЕОФИЗИЧЕСКИЙ РАДИОЛОКАТОР | 2010 |
|
RU2447464C1 |
| ГЕОФИЗИЧЕСКИЙ РАДИОЛОКАТОР | 2008 |
|
RU2375729C1 |
Изобретение относится к области подповерхностной радиолокации, а именно к устройствам определения расположения и формы неоднородностей и включений в строительных конструкциях. Техническим результатом является повышение надежности обнаружения и идентификации подповерхностных объектов в строительных конструкциях. Устройство содержит портативную ЭВМ 1, электронный блок 3, антенный блок 4, высокочастотный генератор 5, контроллер 6 по обработке и вводу данных в ЭВМ, приемник 7 высокочастотного сигнала, передающую антенну 8, приемную антенну 9, триггер 11, коррелятор 12, усилитель 13, линию 14 задержки, блок 15 вычитания, интегратор 16, блок 17 деления, блок 18 формирования эталонного напряжения, блок 19 сравнения, аналого-цифровой преобразователь 20, интерфейс 21, ключ 22, жидкокристаллический индикатор 23, звуковой индикатор 24, блок 25 автоматически регулируемой задержки, перемножитель 26, фильтр 27 нижних частот, экстремальный регулятор 28 и индикатор 29 глубины залегания подповерхностного объекта. 1 ил.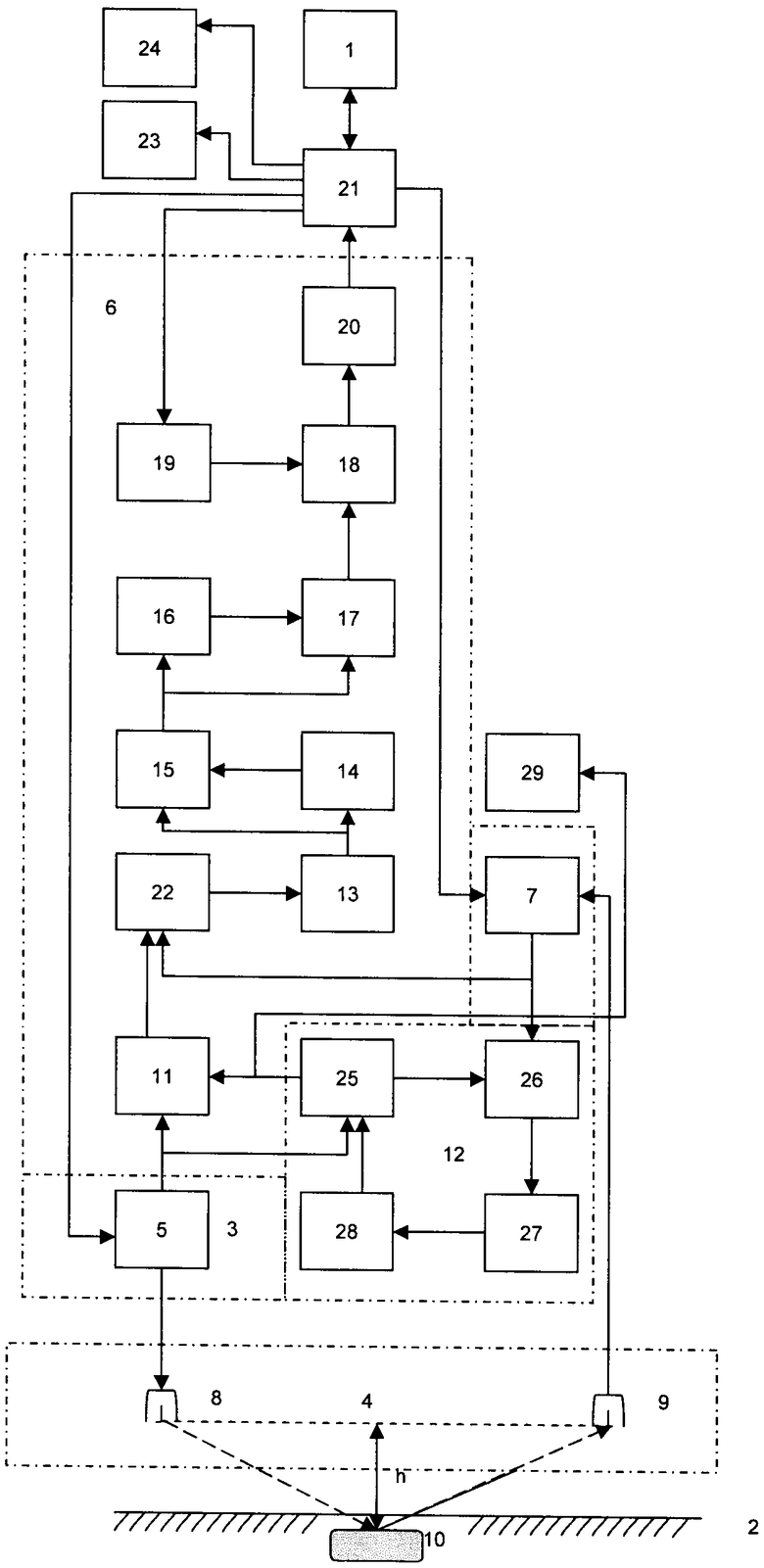
Устройство зондирования строительных конструкций, содержащее последовательно включенные высококачественный генератор, выполненный в виде генератора ударного возбуждения, и передающую антенну, последовательно включенные приемную антенну, приемник высококачественного сигнала, ключ, второй вход которого через триггер соединен со вторым выходом высококачественного генератора, усилитель, линию задержки, блок вычитания, второй вход которого соединен с выходом усилителя, интегратор, блок деления, второй вход которого соединен с выходом блока вычитания, блок сравнения, второй вход которого соединен с выходом блока формирования эталонного напряжения, и аналого-цифровой преобразователь, выход которого через интерфейс связан с портативной ЭВМ, при этом соответствующие выходы интерфейса подключены к высококачественному генератору, приемнику высококачественного сигнала, блоку формирования эталонного напряжения, звуковому и жидкокристаллическому индикаторам, передающая и приемная антенны объединены в антенный блок, отличающееся тем, что оно снабжено блоком автоматической регулируемой задержки, перемножителем, фильтром нижних частот, экстремальным регулятором и индикатором залегания подповерхностного объекта, причем ко второму выходу высокочастотного генератора последовательно подключены блок автоматической регулируемой задержки, перемножитель, второй вход которого соединен с выходом приемника высокочастотного сигнала, фильтр нижних частот и экстремальный регулятор, выход которого соединен со вторым входом блока автоматической регулируемой задержки, второй выход которого подключен ко второму входу триггера и к индикатору залегания подповерхностного объекта.
| УСТРОЙСТВО ЗОНДИРОВАНИЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ | 2005 |
|
RU2282875C1 |
| УСТРОЙСТВО ЗОНДИРОВАНИЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ | 2002 |
|
RU2234694C2 |
| ГЕОФИЗИЧЕСКИЙ РАДИОЛОКАТОР | 2008 |
|
RU2375729C1 |
| WO 2004102222 A1, 25.11.2004. | |||

