Предлагаемый радиолокатор относится к геофизике, в частности к устройствам геоэлектроразведки с использованием электромагнитных волн высокой частоты, и может быть использован при разведке полезных ископаемых, а также для поиска инженерных коммуникаций и других скрытых неоднородностей в исследуемом подповерхностном слое земной поверхности.
Известны устройства для геоэлектроразведки (авт. свид. СССР №№397.877, 455.307, 746.370, 817.640, 1.100.603, 1.151.900, 1.247.805, 1.300.396, 1.420.574, 1.553.933, 1.721.566; патенты РФ №№2.044.331, 2.105.330, 2.194.292; Петровский Н.Д. Радиоволновые методы в подземной геофизике. М., 1971 и другие).
Из известных устройств наиболее близким к предлагаемому является «Геофизический локатор» (патент РФ №2.194.292, G01V 3/12, 2000), который и выбран в качестве прототипа.
Принцип работы указанного радиолокатора основан на методе сверхширокополосного радиолокационного зондирования, при котором оценивается изменение нестационарного электромагнитного поля, образованного отраженными от подповерхностного объекта электромагнитными волнами после его облучения зондирующим радиосигналом, в качестве которого используется последовательность радиоимпульсов с малым числом периодов высокочастотных колебаний в каждом из них (вплоть до одного). При этом разделение приемопередающих каналов по эфиру осуществляется с помощью двух антенн (передающей и приемной), которые образуют двухантенный блок.
Для исключения прямого излучения передатчика и отражений от поверхности воздух-грунт и от слоев с различной глубиной залегания в известном радиолокаторе используется «стробирование по вертикали». Однако известный радиолокатор не обеспечивает автоматического измерения глубины расположения подповерхностных объектов, что снижает надежность их обнаружения и индентификации.
Технической задачей изобретения является повышение надежности обнаружения и идентификации подповерхностных объектов путем автоматического определения глубины их расположения.
Поставленная задача решается тем, что геофизический радиолокатор, содержащий в соответствии с ближайшим аналогом последовательно включенные блок обработки и управления, интерфейс, передатчик, в качестве которого использован генератор ударного возбуждения и ко второму выходу которого подключена передающая антенна, первый смеситель стробоскопического преобразователя, второй вход которого через первый формирователь строба соединен с вторым выходом интерфейса, и триггер, последовательно включенные приемную антенну, второй смеситель стробоскопического преобразователя, второй вход которого через второй формирователь строба соединен с третьим выходом интерфейса, ключ, второй вход которого соединен с выходом триггера, усилитель, второй вход которого через цифроаналоговый преобразователь соединен с четвертым выходом интерфейса, к пятому, шестому и седьмому выходам которого подключены блок обработки и управления, звуковой и жидкокристаллический индикаторы соответственно, линия задержки, блок вычитания, второй вход которого соединен с выходом усилителя, интегратор, блок деления, второй вход которого соединен с выходом блока вычитания, блок сравнения, второй вход которого через формирователь эталонного напряжения соединен с восьмым выходом интерфейса, и аналого-цифровой преобразователь, выход которого подключен ко второму входу интерфейса, отличается от ближайшего аналога тем, что он снабжен блоком регулируемой задержки, перемножителем, фильтром нижних частот и экстремальным регулятором, причем к первому выходу передатчика последовательно подключены блок регулируемой задержки, перемножитель, второй вход которого соединен с выходом второго смесителя стробоскопического преобразователя, фильтр нижних частот и экстремальный регулятор, выход которого подключен к второму входу блока регулируемой задержки, второй выход которого соединен с вторым входом триггера.
Структурная схема предлагаемого радиолокатора представлена на чертеже.
Геофизический радиолокатор содержит последовательно включенные блок 1 обработки и управления, интерфейс 2, передатчик 3, в качестве которого использован генератор ударного возбуждения и ко второму выходу которого подключена передающая антенна 4, первый смеситель 5 стробоскопического преобразователя, второй вход которого через первый формирователь 6 строба соединен с вторым выходом интерфейса 2, и триггер 12, последовательно включенные приемную антенну 7, второй смеситель 10 стробоскопического преобразователя, второй вход которого через второй формирователь 9 строба соединен с третьим выходом интерфейса 2, ключ 13, второй вход которого соединен с выходом триггера 12, усилитель 15, второй вход которого через цифроаналоговый преобразователь 14 соединен с четвертым выходом интерфейса 2, к пятому, шестому и седьмому выходам которого подключены блок 1 обработки и управления, звуковой 17 и жидкокристаллический 18 индикаторы соответственно, линия задержки 19, блок 20 вычитания, второй вход которого соединен с выходом усилителя 15, интегратор 21, блок 22 деления, второй вход которого соединен с выходом блока 20 вычитания, блок 24 сравнения, второй вход которого через формирователь 23 эталонного напряжения соединен с восьмым выходом интерфейса, и аналого-цифровой преобразователь 16, выход которого подключен к второму входу интерфейса 2, последовательно подключенные к первому выходу передатчика 3 блок 25 регулируемой задержки, перемножитель 26, второй вход которого соединен с выходом второго смесителя 10 стробоскопического преобразователя, фильтр 27 нижних частот и экстремальный регулятор 28, выход которого подключен к второму входу блока 25 регулируемой задержки, второй выход которого соединен с вторым входом триггера 12. Блок 25 регулируемой задержки, перемножитель 26, фильтр 27 нижних частот и экстремальный регулятор 28 образуют коррелятор 11.
Геофизический радиолокатор работает следующим образом.
Основным режимом работы является режим «Поиск». Этот режим устанавливается автоматически при включении прибора и используется при поиске и распознавании подповерхностных объектов.
При подаче на радиолокатор напряжения питания блок 1 обработки и управления инициирует установку исходных режимов всех узлов радиолокатора. По команде блока 1 обработки и управления генератор 3 ударного возбуждения формирует зондирующий импульсный сверхширокополосный сигнал в виде одного периода синусоиды амплитудой 25 В и длительностью 1 нс, излучаемый передающей антенной 4 в направлении поверхности Земли.
Обнаружение подповерхностных объектов в режиме «Поиск» осуществляется оператором путем перемещения перед собой вправо-влево антенного блока, укрепленного на штанге, и движением вперед в заданном направлении. При этом необходимо следить за тем, чтобы антенный блок перемещался параллельно обследуемой поверхности на фиксированном расстоянии (не более 5 см от нее). Скорость перемещения антенного блока выбирается в зависимости от условий поиска и должна быть в пределах 0,1-1,0 м/с. В процессе поиска необходимо чередовать поперечные и продольные перемещения антенного блока таким образом, чтобы после каждого взмаха справа налево или слева направо антенный блок перемещался вперед на расстояние до 20 см (на величину своего линейного размера). При этом необходимо следить за тем, чтобы был обследован весь проверяемый участок местности.
Электромагнитная волна, отражающаяся от подповерхностного объекта, воздействует на приемную антенну 7. На эту же антенну воздействуют мешающие прямое излучение передатчика 3 и отраженный сигнал от границы раздела воздух-грунт. Причем большие амплитуды будут иметь сигнал прямого прохождения и сигнал, отраженный от границы раздела воздух-грунт.
Часть энергии зондирующего сигнала с опорного выхода передатчика 3 поступает на первый смеситель 5 стробоскопического преобразователя, куда также подается короткий строб-импульс с формирователя 6 строба. Сформированный в смесителе 5 импульс, представляющий собой мгновенное значение зондирующего периодического сигнала, поступает на установочный вход триггера 12. Триггер 12 переводится в первое (нулевое) состояние, при котором на его выходе формируется отрицательное напряжение.
Отраженный сигнал, содержащий информацию о границе раздела сред и о подповерхностном объекте, поступает с выхода приемной антенны 7 на второй смеситель 10 стробоскопического преобразователя, куда также подается короткий строб-импульс с формирователя 9 строба.
Часть энергии зондирующего сигнала с опорного выхода передатчика 3 одновременно поступает через блок 25 регулируемой задержки, имеющего переменную временную задержку τ, на первый вход перемножителя 26, на второй вход которого подается отраженный сигнал с выхода второго смесителя 10 стробоскопического преобразователя, время запаздывания которого определяется выражением
 ,
,
где h - глубина расположения подповерхностного объекта;
с - скорость распространения радиоволн.
Полученное на выходе перемножителя 26 напряжение пропускается через фильтр 27 нижних частот, на выходе которого формируется корреляционная функция R(τ). Экстремальный регулятор 28, предназначенный для поддержания максимального значения корреляционной функции R(τ) и подключенный к выходу фильтра 27 нижних частот, воздействует на управляющий вход блока 25 регулируемой задержки и поддерживает вводимую им задержку τ, равной τ3(τ=τ3), что соответствует максимальному значению корреляционной функции R(τ).
Шкала блока 25 регулируемой задержки позволяет непосредственно считывать измеренное значение глубины расположения подповерхностного объекта в грунте.

 .
.
Сформированный на втором выходе блока 25 регулируемой задержки импульс, соответствующий временной задержке τ=τ3, поступает на второй вход триггера 12. Последний переводится на второе (единичное) состояние, при котором на его выходе формируется положительное напряжение. Это напряжение поступает на управляющий вход ключа и открывает его. В исходном состоянии ключ 13 всегда закрыт. Коррелятор 11 автоматически определяет глубину залегания подповерхностного объекта и осуществляет «стробирование по вертикали», которое обеспечивает последовательный просмотр подповерхностного пространства от границы раздела воздух-грунт до слоев различной глубины.
«Стробирование по горизонтали» позволяет на фоне вариаций электромагнитного поля, не связанных с электромагнитной волной, отражающейся от подповерхностного объекта, надежно выделять в подповерхностных слоях подповерхностные объекты.
Для исключения влияния периодических квазистационарных вариаций электромагнитного поля Земли осуществляют периодическое измерение напряженности поля и операцию нормирования разностного сигнала двух последовательных измерений, т.е. интегрируют разностный сигнал, делят разностный сигнал на проинтегрированный разностный сигнал. Операция сравнения нормированного сигнала с заданным пороговым значением позволяет принять решение о наличии или отсутствии подповерхностного объекта.
Для этого сформированный в смесителе 10 импульс, представляющий собой мгновенное значение принятого периодического сигнала, отраженного от подповерхностного объекта, или импульс, обусловленный вариациями электромагнитного поля, через открытый ключ 13 поступает после усиления в усилителе 15 в блок 20 вычисления непосредственно и через линию 10 задержки. При этом в каждой точке наблюдения производится не менее двух последовательных измерений указанных импульсов. Затем производится операция вычитания двух последовательных измерений. Для этого импульс, соответствующий предшествующему измерению, задерживается линией 19 задержки до момента сравнения его с последующим импульсом в блоке 20 вычитания.
Операция интегрирования разностного сигнала и деление разностного сигнала на проинтегрированный разностный сигнал производятся в блоках 21 и 22. В блоке 24 осуществляется сравнение нормированного сигнала с пороговым значением сигнала, задаваемым блоком 23. При превышении порогового уровня сигнал поступает на вход аналого-цифрового преобразователя 16, где он преобразуется в цифровую форму и поступает через интерфейс 2 в спецвычислитель 1. Цифро-аналоговый преобразователь 14 предназначен для преобразования информации, поступающей из блока 1 обработки и управления.
После аналого-цифрового преобразования данные через интерфейс 2 поступают в спецвычислитель 1, а затем на экран жидкокристаллического индикатора 18. Частота вертикальной (строчной) и горизонтальной (кадровой) разверток могут варьироваться в определенных пределах. На экране индикатора 18 в реальном масштабе времени наблюдается плоская яркостная картина подповерхностных объектов.
Максимальная амплитуда принимаемого сигнала сравнивается с установленным пороговым значением, при превышении которого включается звуковой индикатор 17.
Появление звукового сигнала и визуального сигнала на экране требует остановки оператора и свидетельствует о том, что в зоне действия антенного блока находится объект, природу происхождения которого следует установить, а при необходимости уточнить его местоположение и форму.
Для анализа объекта следует выполнить сканирование объекта (перемещение антенного блока от границы обнаружения до границы потери) со скоростью, определяемой световой строкой на экране индикатора.
Режим «Сканирование» и формирование вертикального среза грунта с объектом (режим «Срез») осуществляется переходом из режима «Поиск» нажатием кнопки «Скан». Через 20 с после обработки сигнала на экране индикатора 18 появляется радиолокационный образ объекта, дающий представление о форме и размерах объекта. По желанию оператора контрастность изображения может меняться кнопками «<», «>» в сторону уменьшения или увеличения.
Для идентификации обнаруженного объекта с имеющимися эталонами оператору необходимо обратиться к обучаемому алгоритму, при этом на экране высвечивается соответствующее имя (например, «объект 2»). В случае несоответствия выводится сообщение «объект не опознан».
Для определения материала обнаруженного объекта оператор нажатием кнопки «Скан» запускает базовый алгоритм. На экране выводится сообщение о типе материала: «Металл», «Композит» или «Пластик».
Взаимодействие блока 1 обработки и управления с остальными узлами радиолокатора, а также организация управления работой осуществляется через схемы интерфейса 2.
Таким образом, предлагаемый геофизический радиолокатор по сравнению с прототипом обеспечивает повышение надежности обнаружения и идентификации подповерхностных объектов. Это достигается путем автоматического определения глубины расположения подповерхностных объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГЕОФИЗИЧЕСКИЙ РАДИОЛОКАТОР | 2010 |
|
RU2447464C1 |
| ГЕОФИЗИЧЕСКИЙ РАДИОЛОКАТОР | 2000 |
|
RU2194292C2 |
| ГЕОФИЗИЧЕСКИЙ РАДИОЛОКАТОР | 2003 |
|
RU2234112C1 |
| ГЕОФИЗИЧЕСКИЙ РАДИОЛОКАТОР | 1996 |
|
RU2105330C1 |
| МИНОИСКАТЕЛЬ | 2010 |
|
RU2451953C1 |
| РАДИОЛОКАТОР ДЛЯ ОБНАРУЖЕНИЯ НЕОДНОРОДНОСТЕЙ В ПОДПОВЕРХНОСТНОМ СЛОЕ ЗЕМЛИ | 2002 |
|
RU2200332C1 |
| УСТРОЙСТВО ЗОНДИРОВАНИЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ | 2011 |
|
RU2460090C1 |
| УСТРОЙСТВО ЗОНДИРОВАНИЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ | 2015 |
|
RU2589886C1 |
| УСТРОЙСТВО ЗОНДИРОВАНИЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ | 2012 |
|
RU2533311C2 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ПОДПОВЕРХНОСТНЫХ СЛОЕВ ПОЧВЫ | 1997 |
|
RU2154845C2 |
Изобретение относится к геофизике, в частности к устройствам геоэлектроразведки с использованием электромагнитных волн высокой частоты, и может быть использовано при разведке полезных ископаемых, а также для поиска инженерных коммуникаций и других скрытых неоднородностей. Технический результат: повышение надежности обнаружения и идентификации объектов путем автоматического определения глубины их расположения. Сущность: геофизический радиолокатор содержит блок 1 обработки и управления, интерфейс 2, передатчик 3, передающую антенну 4, первый смеситель 5 стробоскопического преобразователя, первый формирователь 6 строба, приемную антенну 7, приемник 8, второй формирователь 9 строба, второй смеситель 10 стробоскопического преобразователя, коррелятор 11, триггер 12, ключ 13, цифроаналоговый преобразователь 14, усилитель 15, аналого-цифровой преобразователь 16, звуковой индикатор 17, жидкокристаллический индикатор 18, линию 19 задержки, блок 20 вычитания, интегратор 21, блок 22 деления, блок 23 формирования эталонного напряжения, блок 24 сравнения, блок 25 регулируемой задержки, перемножитель 26, фильтр 27 нижних частот и экстремальный регулятор 28. 1 ил.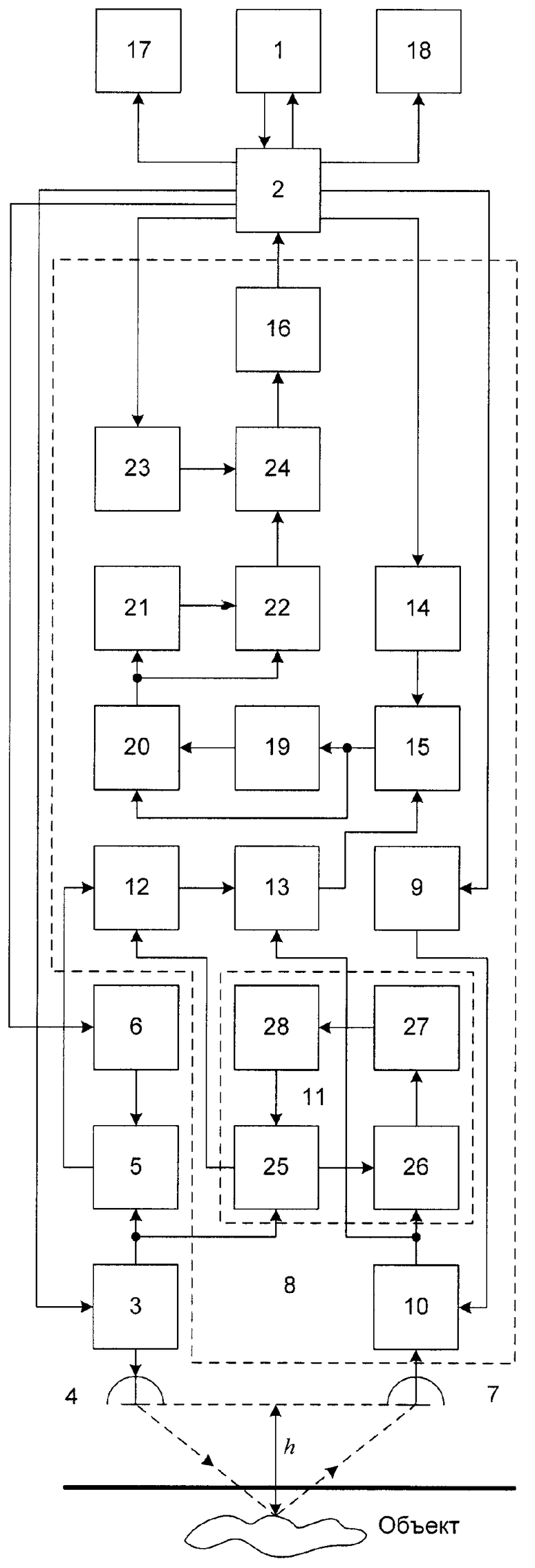
Геофизический радиолокатор, содержащий последовательно включенные блок обработки и управления, интерфейс, передатчик, в качестве которого использован генератор ударного возбуждения и ко второму выходу которого подключена передающая антенна, первый смеситель стробоскопического преобразователя, второй вход которого через первый формирователь строба соединен с вторым выходом интерфейса, и триггер, последовательно включенные приемную антенну, второй смеситель стробоскопического преобразователя, второй вход которого через второй формирователь строба соединен с третьим выходом интерфейса, ключ, второй вход которого соединен с выходом триггера, усилитель, второй вход которого через цифроаналоговый преобразователь соединен с четвертым выходом интерфейса, к пятому, шестому и седьмому выходам которого подключены блок обработки и управления, звуковой и жидкокристаллический индикаторы соответственно, линия задержки, блок вычитания, второй вход которого соединен с выходом усилителя, интегратор, блок деления, второй вход которого соединен с выходом блока вычитания, блок сравнения, второй вход которого через формирователь эталонного напряжения соединен с восьмым выходом интерфейса, и аналого-цифровой преобразователь, выход которого подключен к второму входу интерфейса, отличающийся тем, что он снабжен блоком регулируемой задержки, перемножителем, фильтром нижних частот и экстремальным регулятором, причем к первому выходу передатчика последовательно подключены блок регулируемой задержки, перемножитель, второй вход которого соединен с выходом второго смесителя стробоскопического преобразователя, фильтр нижних частот и экстремальный регулятор, выход которого подключен к второму входу блока регулируемой задержки, второй выход которого соединен с вторым входом триггера.
| ГЕОФИЗИЧЕСКИЙ РАДИОЛОКАТОР | 2000 |
|
RU2194292C2 |
| ГЕОФИЗИЧЕСКИЙ РАДИОЛОКАТОР | 2003 |
|
RU2234112C1 |
| ГЕОФИЗИЧЕСКИЙ РАДИОЛОКАТОР | 1996 |
|
RU2105330C1 |
| МОБИЛЬНЫЙ ГЕОРАДАР ДЛЯ ДИСТАНЦИОННОГО ПОИСКА МЕСТОПОЛОЖЕНИЯ ПОДЗЕМНЫХ МАГИСТРАЛЬНЫХ КОММУНИКАЦИЙ И ОПРЕДЕЛЕНИЯ ИХ ПОПЕРЕЧНОГО РАЗМЕРА И ГЛУБИНЫ ЗАЛЕГАНИЯ В ГРУНТЕ | 2004 |
|
RU2256941C1 |
| US 6677201 B1, 23.04.2002 | |||
| US 5819859 A, 13.10.1998. | |||

