ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится, в общем, к анализу структуры среды, а именно к обработке сейсмических данных для анализа подземных структур.
ПРЕДПОСЫЛКИ К ИЗОБРЕТЕНИЮ
В известных специалистам способах сейсмической съемки для получения данных о подповерхностных (т.е. подземных) структурах используются массивы сейсмических источников и приемников. Вслед сейсмическим раздражителем (например, детонацией или механический ударом) на некотором источнике, на каждом из приемников снимают сейсмографическую трассу, т.е. записывают сейсмический сигнал как функцию времени, обусловленную отражениями волны раздражителя от подповерхностных слоев, лежащих под измерительным массивом. Для построения изображения слоев совместно обрабатывают трассы, снятые на нескольких приемниках для раздражителей от расположенных в различных местах источников.
Чтобы увеличить отношение сигнал/шум, в ходе этого процесса множество трасс для пар из источника и приемника, расположенных вокруг общей средней (глубинной) точки (ОСТ), выравнивают по времени и суммируют. (Подобного рода группу трасс обычно называют сборкой, а процессы выравнивания и суммирования трасс известны как коррекция на нормальное приращение времени отраженной волны (NMO) и суммирование (накопление) трасс.) Выравнивание имеет целью учесть разницу во времени пробега сейсмических волн между различными парами из источника и приемника. Время пробега обычно полагают гиперболической функцией расстояния между источником и приемником, а временной сдвиг, применяемый при выравнивании трасс для компенсации этой гиперболической зависимости, вычисляют по простой формуле, в которую входят расстояние между источником и приемником, а также скорость распространения волн в среде.
Известно, однако, что формула для гиперболического выбега неточно отражает действительные характеристики подземных структур и что ее применение ведет к потерям информации. По этой причине был предложен ряд альтернативных подходов для правильного выравнивания сборок трасс. Например, в патенте №1185103429 (раскрытые в указанном патенте сведения входят в настоящую заявку по ссылке), описан способ анализа таких структур с применением гомеоморфного построения. (При гомеоморфном построении каждый элемент изучаемой области отображается один в один в соответствующий элемент ее изображения, в результате чего изучаемая область и ее изображение оказываются топологически эквивалентны.) Считается, что такой способ позволяет построить множество типов суммарных разрезов и соответствующих изображений без потерь четкости.
Преобразование Радона - широко известный математический прием, применяемый при обработке различных изображений. Известны несколько способов применения преобразования Радона при анализе сейсмических данных. В частности, для такого анализа применялись три варианта преобразования Радона, а именно гиперболическое, параболическое и преобразование для разреза наклонного суммирования. Преобразование для разреза наклонного суммирования описано, например, в работе Treitel et al., «Plane-Wave Decomposition of Seismograms», Geophysics, том 47, №10, октябрь 1982 г., стр.1375-1401, включенной в настоящую заявку по ссылке. Также такое преобразование использовано в патенте № US 4760563, включенном в настоящую заявку по ссылке, и в работе Thorson, Claerbout, «Velocity-Stack and Slant-Stack Stochastic Inversion», Geophysics, том 50, №12, декабрь 1985 г., стр.2727-2741, включенной в настоящую заявку по ссылке.
Гиперболическое и параболическое преобразования Радона описаны, например, в Foster, Mosher, «Suppression of Multiple Reflections using the Radon Transform», Geophysics, том 57, №3, март 1992 г., стр.386-395, включенной в настоящую заявку по ссылке. Гиперболическое преобразование описано, например, в Mitchell, Kelamis, «Efficient Tau-P Hyperbolic Velocity Filtering», Geophysics, том 55, №5, май 1990 г., стр.619-625, включенной в настоящую заявку по ссылке. Параболическое преобразование описано, например, в Hampson, «Inverse Velocity Stacking for Multiple Elimination», Journal of the Canadian Society of Exploration Geophysicists, том 22, №1, декабрь 1986 г., стр.44-55, включенной в настоящую заявку по ссылке. Дискретное преобразование Радона описано в Beylkin, «Discrete Radon Transform», IEEE Transactions on Acoustics, Speech and Signal Processing, том ASSP-35, №2, февраль 1987 г., стр.162-172, включенной в настоящую заявку по ссылке.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Варианты осуществления настоящего изобретения предлагают компьютерный способ обработки данных, предусматривающий следующие шаги:
- берут первую коллекцию трасс, показывающих изменение во времени принимаемых сигналов, обусловленное отражениями сейсмических волн от подповерхностных структур;
- определяют метрику преобразования Радона относительно набора параметров фронта сейсмических волн, при этом преобразование определяет сложение амплитуд сейсмических волн вдоль траекторий, определяемых параметрами волнового фронта;
- применяют преобразование Радона к первой коллекции трасс, преобразуя ее в многомерный массив данных, определяемый как функция по меньшей мере двух из параметров волнового фронта;
- обработкой многомерного массива данных получают вторую коллекцию трасс, качество изображения в которой выше, чем в первой коллекции;
- обработкой второй коллекции трасс строят сейсмический снимок подповерхностных структур с повышенным качеством изображения.
В некоторых вариантах осуществления преобразование, обработку многомерного массива данных и второй коллекции производят безотносительно к расположению первых точек, в которых порождались сейсмические волны, вторых точек, в которых принимались сигналы, а также средних между первыми и вторыми точек.
В одном из вариантов осуществления многомерный массив данных имеет три или более измерения, отвечающие по меньшей мере двум из параметров волнового фронта и времени пробега сейсмических волн. В раскрытом варианте осуществления в число параметров волнового фронта входят угловой параметр и по меньшей мере один радиус кривизны фронта волны, исходящей от подповерхностного отражателя. В одном из вариантов осуществления угловой параметр есть угол выхода волны, а радиус кривизны представляет собой, соответственно, радиус волнового фронта с отражением от общей точки (CRE) и с отражением от общего участка (СЕЕ).
В другом варианте осуществления при обработке многомерного массива данных предусмотрена коррекция искажений, внесенных в массив в результате применения преобразования Радона. Для этого может быть предусмотрено частотное преобразование многомерного массива данных с коррекцией в частотном представлении. Как вариант, искажения можно корректировать во временном представлении. В отдельных вариантах осуществления коррекция искажений предполагает итеративную корректирующую обработку многомерного массива данных.
В отдельных вариантах осуществления при обработке многомерного массива данных различают первые и вторые сейсмические события, которые трансформируются соответственно в первые и вторые области массива. Разделение первого и второго событий может предусматривать обнуление первой или второй области в многомерном массиве. В одном из вариантов осуществления первое сейсмическое событие вызвано однократным отражением, а второе - многократным отражением. Вместо или вместе с этим для разделения первого и второго событий задают первую и вторую области в массиве как функцию по меньшей мере двух параметров волнового фронта.
В другом варианте осуществления при обработке многомерного массива данных предусмотрена фильтрация по меньшей мере части данных массива. В еще одном варианте осуществления при обработке массива предусмотрена интерполяция данных в нем для увеличения числа трасс во второй коллекции по сравнению с первой. В раскрытом варианте осуществления при обработке многомерного массива данных предусмотрена компенсация различия скоростей сейсмических волн. В другом варианте осуществления при обработке массива предусмотрено применение к нему миграции.
В отдельных вариантах осуществления при обработке второй коллекции предусмотрено интегрирование входящих в нее трасс для получения интегральной трассы, представляющей подповерхностные структуры. При обработке многомерного массива данных может быть предусмотрено применение к нему обратного преобразования Радона для получения второй коллекции трасс.
Кроме того, в одном из вариантов осуществления настоящего изобретения предлагается устройство обработки данных, содержащее:
- интерфейс, предназначенный для приема первой коллекции трасс, показывающих изменение во времени принимаемых сигналов, обусловленное отражениями сейсмических волн от подповерхностных структур;
- процессор сигналов, предназначенный определять метрику преобразования Радона относительно набора параметров фронта сейсмических волн, причем преобразование определяет сложение амплитуд сейсмических волн вдоль траекторий, определяемых параметрами волнового фронта,
а также предназначенный применять преобразование Радона к первой коллекции трасс, преобразуя ее в многомерный массив данных, определяемый как функция по меньшей мере двух из параметров волнового фронта,
а также предназначенный обрабатывать многомерный массив данных для получения второй коллекции трасс, качество изображения в которой выше, чем в первой коллекции,
а также предназначенный обрабатывать вторую коллекцию трасс для построения сейсмического снимка подповерхностных структур с повышенным качеством изображения.
Также в одном из вариантов осуществления настоящего изобретения предлагается программный продукт, содержащий машинный носитель, на котором записаны машинные инструкции, предписывающие компьютеру:
- получить первую коллекцию трасс, показывающих изменение во времени принимаемых сигналов, обусловленное отражениями сейсмических волн от подповерхностных структур;
- определить метрику преобразования Радона относительно набора параметров фронта сейсмических волн, при этом преобразование определяет сложение амплитуд сейсмических волн вдоль траекторий, определяемых параметрами волнового фронта;
- применить преобразование Радона к первой коллекции трасс, преобразуя ее в многомерный массив данных, определяемый как функция по меньшей мере двух из параметров волнового фронта;
- обработкой многомерного массива данных получить вторую коллекцию трасс, качество изображения в которой выше, чем в первой коллекции;
- обработкой второй коллекции трасс построить сейсмический снимок подповерхностных структур с повышенным качеством изображения.
Настоящее изобретение станет более понятно из нижеследующего подробного описания вариантов его осуществления, а также прилагаемых чертежей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
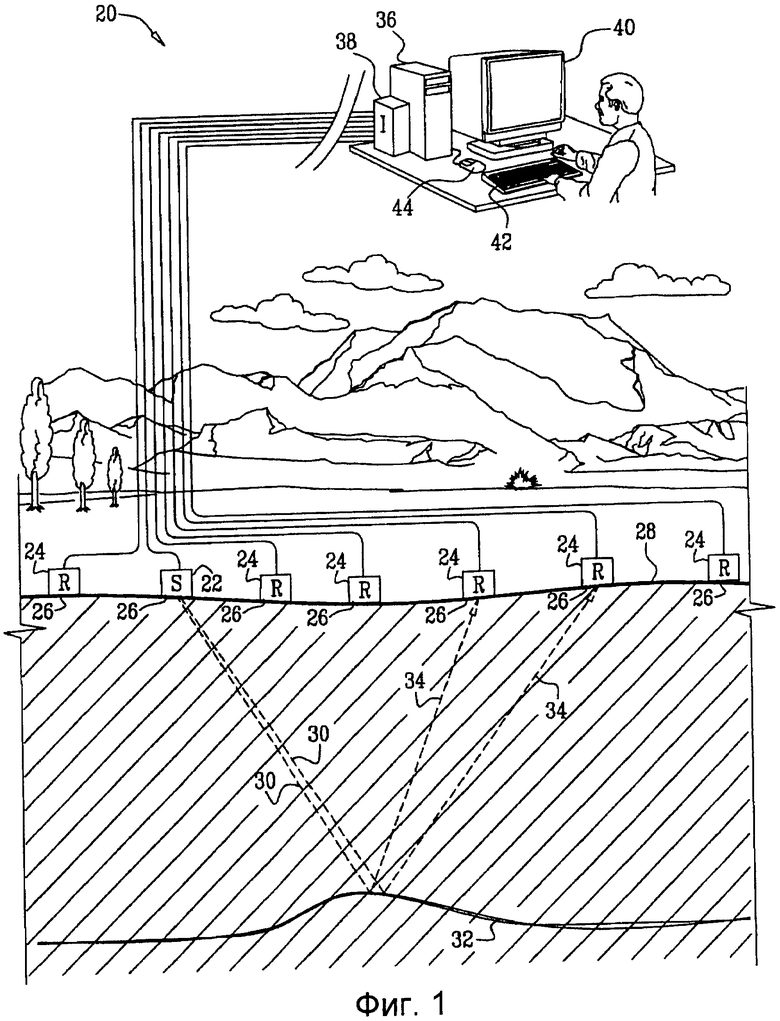
Фиг.1 схематически показывает систему сейсмической съемки согласно одному из вариантов осуществления настоящего изобретения.
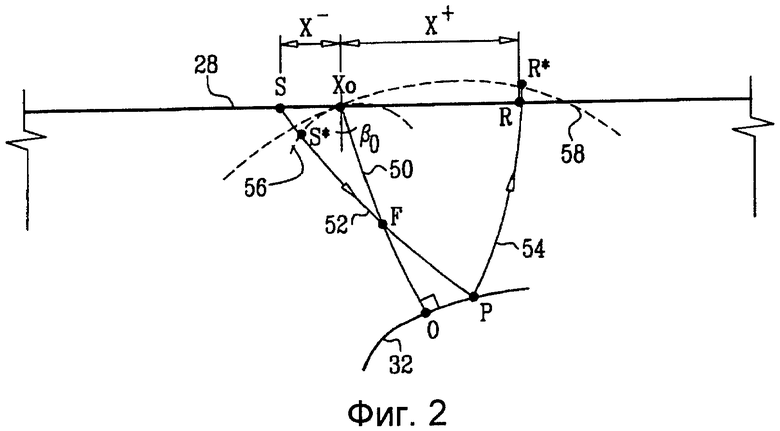
Фиг.2 - фиг.4 схематически показывают на разрезе подповерхностной области параметры, используемые в представлении сейсмических волн, распространяющихся в исследуемой области, согласно одному из вариантов осуществления настоящего изобретения.
Фиг.5 схематически показывает прямое и обратное преобразования Радона волнового фронта (ВПР) согласно одному из вариантов осуществления настоящего изобретения.
Фиг.6А - фиг.6С, фиг.7А - фиг.7С и фиг.8А - фиг.8С показывают сейсмические снимки, получаемые на различных стадиях способа анализа сейсмических данных посредством ВПР согласно вариантам осуществления настоящего изобретения.
Фиг.9А - фиг.9F показывают в виде графиков двумерные проекции трехмерного сейсмического снимка в координатах ВПР согласно вариантам осуществления настоящего изобретения.
Фиг.10 показывает блок-схему алгоритма способа анализа сейсмических данных посредством ВПР согласно вариантам осуществления настоящего изобретения.
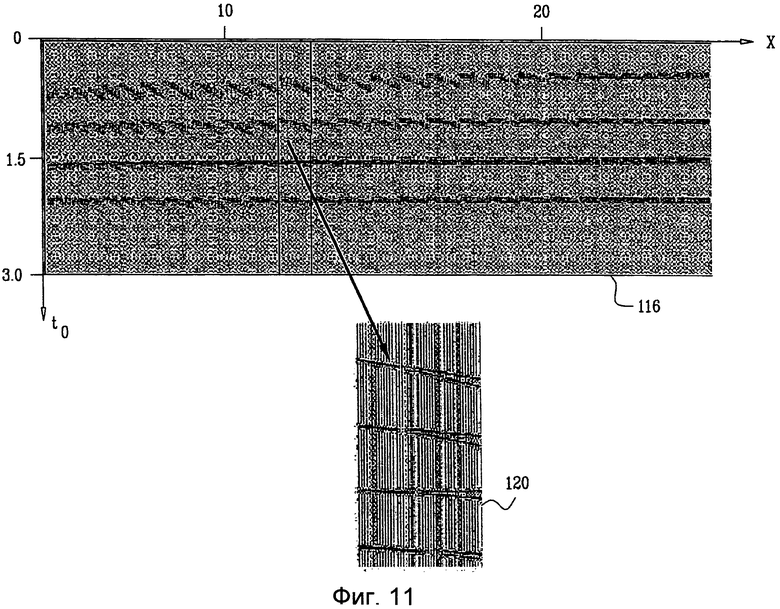
Фиг.11 показывает компьютерную модель сейсмического снимка, на котором видна интерференция, вызванная множественными отражениями.
Фиг.12А и фиг.12В показывают компьютерные модели сейсмических снимков, на которых скорректирована интерференция от множественных отражений согласно одному из вариантов осуществления настоящего изобретения.
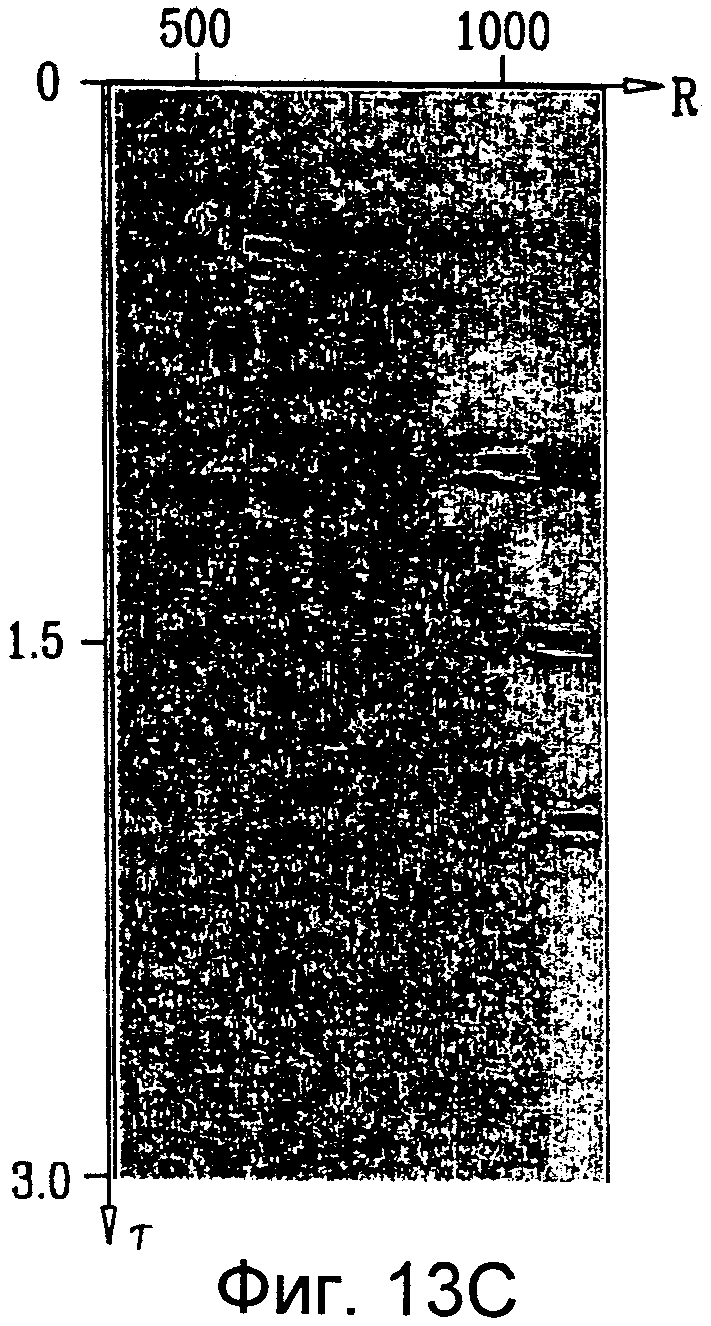
Фиг.13А - фиг.13С показывают двумерные проекции трехмерных изображений в координатах ВПР, на которых видно разделение первичного и множественных отражений согласно одному из вариантов осуществления настоящего изобретения.
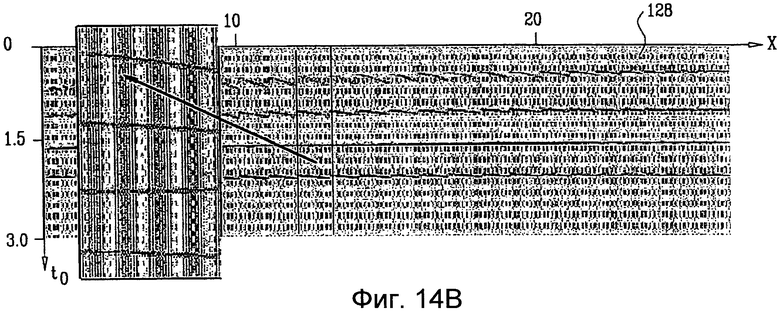
Фиг.14А и фиг.14В показывают компьютерные модели сейсмических снимков, на которых видно разделение первичного и множественных отражений согласно одному из вариантов осуществления настоящего изобретения.
Фиг.15А и фиг.15В показывают реальные сейсмические снимки, на которых видно разделение первичного и множественных отражений согласно одному из вариантов осуществления настоящего изобретения.
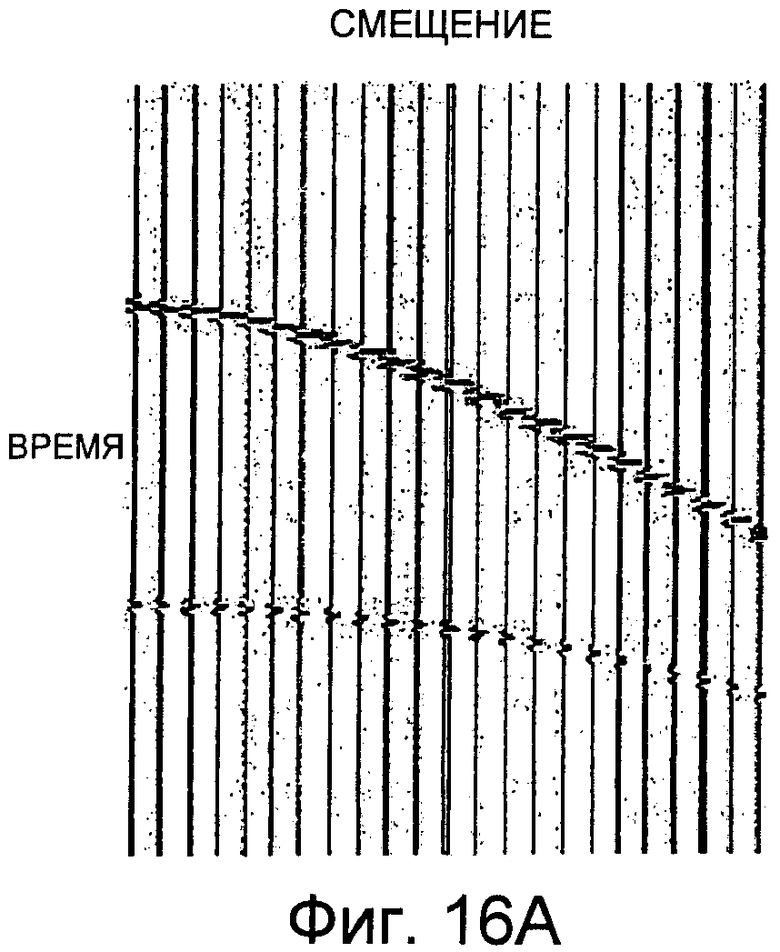
Фиг.16А и фиг.16В показывают на компьютерных моделях сейсмических снимков способ интерполяции трасс посредством ВПР согласно одному из вариантов осуществления настоящего изобретения.
Фиг.17А - фиг.17С показывают на компьютерных моделях сейсмических снимков способ декомпозиции волны посредством ВПР согласно одному из вариантов осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
ОБЗОР
В описанных ниже вариантах осуществления настоящего изобретения предлагаются улучшенные способы и системы для анализа сейсмических данных. В описанных в настоящей заявке способах и системах применяется новое преобразование, называемое здесь преобразованием Радона на метрике волнового фронта (ВПР), выраженное через параметры фронта сейсмических волн.
В отдельных вариантах осуществления в процессор сигналов подают коллекцию трасс в двумерных или трехмерных координатах время-смещение. Такой набор трасс называют входной суперподборкой. В нее могут входить подборки общего пункта взрыва (ОПВ), общего пункта приема (ОПП), общей средней точки (ОСТ) или комбинация подборок различных типов. В общем случае не требуется какой-либо предварительный отбор трасс во входной суперподборке. Процессор сигналов применяет ко входной суперподборке преобразование Радона на метрике волнового фронта, преобразуя ее в многомерный массив данных, определенный как функция по меньшей мере двух параметров волнового фронта. В число параметров волнового фронта могут входить, например, угловые параметры, такие как угол падения волн, а также радиусы кривизны фронта волны.
Процессор сигналов обрабатывает многомерный массив данных, а затем преобразует его обратно в координаты время-смещение, чтобы получить улучшенную входную суперподборку. Качество изображения на получаемой суперподборке лучше, чем на исходной, за счет производимой в координатах ВПР обработки. Процессор сигналов строит сейсмическое изображение подповерхностных структур повышенного качества на основании улучшенной входной суперподборки.
Обработка в координатах ВПР основана на том, что различные сейсмические события часто характеризуются различными значениями параметров волнового фронта, т.е. отображаются в различные точки или области в координатах ВПР. Поэтому сейсмические события, интерферирующие в координатах время-смещение, могут оказаться хорошо различимы в координатах ВПР. Например, первичное отражение и множественные отражения часто характеризуются различными значениями параметров волнового фронта, а потому можно отделить одно от другого в координатах ВПР. То есть процессор сигналов может фильтровать или обнулять сигнал в координатах ВПР, чтобы подавить вторичные отражения. Обработка в координатах ВПР также может служить, например, для интерполяции трасс, декомпозиции и различения волн по различным параметрам волнового фронта, скоростного анализа и фильтрации.
В силу возможности разрешать различные сейсмические события в координатах ВПР, описанные в настоящей заявке способы и системы позволяют строить изображения превосходного по сравнению с известными способами качества. Более того, поскольку раскрытые способы могут работать с чрезвычайно большими суперподборками, не требуя предварительного отбора трасс, можно получить значительно более высокое отношение сигнал/шум, чем достигается известными способами.
ОПИСАНИЕ СИСТЕМЫ
На фиг.1 схематически показана система 20 сейсмической съемки согласно одному из вариантов осуществления настоящего изобретения. Множество источников 22 и приемников 24 сейсмических сигналов размещены в виде сетки точек 26 на поверхности 28 Земли, под которой находится исследуемая область. Обычно в источниках 22 имеются заряды взрывчатки, подрываемые в определенные моменты, тогда как в приемниках 24 имеются сейсмические датчики, снимающие сейсмотрассы, которые отображают амплитуду приходящих в данную точку 26 сейсмических волн как функцию времени. Хотя на фиг.1 для простоты показано расположение источников и приемников на одной линии (что подразумевает двумерную сейсморазведку), обычно система 20 имеет сетку источников и приемников, распределенных по земной поверхности, а потому может производить как двумерную, так и трехмерную сейсморазведку.
Например, как показано на фиг.1, сейсмический раздражитель (детонация или механический удар) в источнике 22 (пункте взрыва) посылает вглубь поверхности 28 волны вдоль траекторий 30. Для неоднородной среды траектории 30 криволинейны. Волны отражаются от подземной структуры 32, например, от границы слоев из различных материалов. Отраженные волны вдоль траекторий 34 (криволинейных для однородной среды) возвращаются к поверхности 28, где их регистрируют приемники 24. Отраженные от той или иной структуры волны достигают различных приемников в различные моменты, поскольку они должны преодолеть под землей различные расстояния, а также в силу вариаций формы структуры 32 и промежуточных слоев между отражающей структурой и поверхностью 28.
Процессор сигналов 36 получает снятые приемниками 24 трассы через соответствующий интерфейс 38. Этот интерфейс может быть предназначен управлять подачей и приемом сейсмосигналов на поверхности 28 в реальном времени, либо же на него могут поступать заранее записанные трассы от соответствующего регистрирующего оборудования (не показано). Процессор 36, как правило, содержит компьютер общего назначения и программное обеспечение, необходимое для выполнения описанных в настоящей заявке функций. Такое программное обеспечение можно записывать в память компьютера в электронной форме, например, по сети, либо же может предоставляться на материальном носителе - оптическом, магнитном или электронном запоминающем устройстве. Как вариант, по меньшей мере часть функций процессора 36 может быть передана соответствующему сигнальному процессору (DSP) или иному специализированному или программируемому аппаратному устройству обработки данных. Как правило, процессор 36 подключен к устройству 40 для вывода сейсмических данных и изображений, например, к дисплею. Для взаимодействия с пользователем к процессору 36 также может быть подключено одно или несколько устройств ввода, таких как клавиатура 42 и/или устройство 44 ввода координат.
Для построения сейсмического изображения области, лежащей под поверхностью 28, процессор 36 обрабатывает суперподборки сейсмограмм, полученных от приемников 24. Отдельно взятая суперподборка может содержать коллекцию сборок общего пункта взрыва (т.е. трасс, снятых от единственного пункта взрыва), трасс общего пункта приема (трасс, записанных на одном приемнике от нескольких пунктов взрыва), сборок общей средней точки или комбинацию сборок различных типов. Принципы и правила, применяемые процессором при построении изображений подповерхностных структур, объясняются ниже применительно к фиг.2 - фиг.4.
На фиг.2 на схематическом изображении разреза подземной области, лежащей под поверхностью 28, показан пример пробега через эту область сейсмических волн, согласно одному из вариантов осуществления настоящего изобретения. Показаны некоторые из параметров, применяемых при вычислении кинематических поправок относительно структуры 32 для всех подборок суперподборки вокруг некоторой центральной точки, обозначенной Х0. Приращение времени здесь вычисляют для произвольного источника S и приемника R, расположенных на поверхности 28, соответственно на расстояниях Х- и Х+ от центральной точки Х0. Хотя данный вариант осуществления (как и другие варианты в настоящей заявке) для простоты описывается для двумерного пространства X-Z, эти принципы можно очевидным образом распространить на трехмерное пространство, в котором обычно производят сейсмическую съемку.
Центральный луч 50 сейсмических волн из точки Х0 есть по определению луч, нормально падающий на структуру 32 в точке О. Луч 50 уходит в глубину и возвращается к поверхности 28 под углом выхода β0 относительно нормали к поверхности. Луч 52 из точки S отражается от структуры 32 в точке Р и возвращается как отраженный луч 54 в точку R. В данном примере луч 52 пересекает луч 50 в точке F. Таким образом, совокупность лучей 50, 52 и 54 можно смоделировать фокусирующейся волной, которая сходится от фронта 56 к точке F, а затем отражается от структуры 32 и достигает поверхности 28 как расходящийся фронт 58. Волновые фронты 56 и 58 пересекают лучи 52 и 54 в точках S* и R* соответственно.
Если принять скорость распространения сейсмических волн в исследуемой области однородной, время пробега сейсмической волны вдоль отрезков S*F и FX0 будет одинаковым, т.е. tS*F=tFX0, как и время пробега вдоль отрезков S*PR и X0OX0:  Время пробега волны от источника S до приемника R можно выразить как:
Время пробега волны от источника S до приемника R можно выразить как:

Первый член данного выражения, tS*PR*, равен времени пробега туда и обратно по центральному (с нулевым смещением) лучу X0FO. Временные поправки tSS* и tRR* можно выразить через приповерхностную скорость в подземной среде и параметры, относящиеся к центральному лучу, как объясняется ниже.
На фиг.3 и фиг.4 на схематических изображениях разреза подземной области с фиг.2 показаны параметры волнового фронта, применяемые при вычислении локальных кинематических поправок для данной области согласно одному из вариантов осуществления настоящего изобретения. При вычислениях используется гомеоморфная модель, описанная в цитировавшемся выше патенте № US 5103429. В описанных ниже вариантах осуществления в число таких параметров входят угол выхода β0 (который также можно определить как угол входа), показанный на фиг.2; радиус Rcre кривизны волнового фронта с отражением от общей точки (CRE), показанный на фиг.3; радиус Rcee кривизны волнового фронта с отражением от общего участка (СЕЕ или нормальная волна), показанный на фиг.4. Как видно на фиг.2 - фиг.4, параметры β0, Rcre и Rcee прямо связаны с физическими характеристиками структуры 32.
Как показано на фиг.3, волна, отраженная в точке Р структуры 32, порождает волновой фронт 60, достигающий поверхности 28. Rcre - радиус дуги 62 круга (или сферы), которой аппроксимируют волновой фронт 60. Этот радиус можно связать с обычно применяемой в расчетах скоростью Vst по методу ОСТ (скоростью накапливания) в подповерхностной области формулой  , где V0 - средняя скорость сейсмических волн вблизи поверхности 28, a t0 - время пробега сейсмической волны на отрезке Х0Р.
, где V0 - средняя скорость сейсмических волн вблизи поверхности 28, a t0 - время пробега сейсмической волны на отрезке Х0Р.
Параметр Rcee, как видно на фиг.4, представляет собой радиус дуги 74 круга (или сферы), которой аппроксимируют фронт 72 нормальной (СЕЕ) волны, распространяющейся от отрезка 70 структуры 32 до поверхности 28. Фронт 72 нормальной волны образован нормальными лучами, исходящими от различных точек отрезка 70 между точками а и b. Образующийся в результате фронт 72 между соответствующими точками А и В определяется, следовательно, формой структуры 32. Rcee моделирует эту форму посредством мнимого центра О, из которого исходит волновой фронт.
Отдельные вопросы вычисления кинематических поправок по параметрам волнового фронта рассмотрены в патентной заявке № US 11/900,243 «Комплексный анализ кинематики для вычисления негиперболических кинематических поправок», поданной 11 сентября 2007 г. Раскрытые в этой заявке сведения включаются в настоящую заявку по ссылке.
ПРЕОБРАЗОВАНИЕ РАДОНА ВОЛНОВОГО ФРОНТА (ВПР)
Математическая функция, известная специалистам как преобразование Радона, представляет собой интеграл некоторой физической характеристики среды вдоль некоторого пути через эту среду. В сейсморазведке преобразование Радона применяют к сейсмограмме d(t,x), где x обозначает некоторый пространственный параметр, как например пространственное смещение, a t обозначает время пробега сейсмической волны туда и обратно. Дискретное преобразование Радона можно записать в форме суммы амплитуд сейсмической волны вдоль заданного пути сквозь подземную среду:

Переменной t в уравнении [2] обозначен путь, вдоль которого производится сложение. Тем или иным образом выражая t как функцию q, τ и х, получают различные пути (траектории) суммирования сквозь среду.
В описанных в настоящей заявке вариантах осуществления настоящего изобретения применяется новое преобразование, именуемое здесь преобразованием Радона на метрике волнового фронта (ВПР), в котором траектория суммирования выражена через параметры фронта сейсмических волн. В волновой теории волновой фронт обычно определяют как поверхность равной фазы распространяющейся волны, т.е. геометрическое место точек, в которых фаза волны одинакова. В контексте настоящей заявки и формулы изобретения под «параметром волнового фронта» понимается любая числовая величина, характеризующая геометрию фронта сейсмической волны. В число таких параметров могут входить угловой параметр, как, например, угол входа или угол выхода волны, радиусы, например, кривизны волнового фронта, или любой другой подходящий параметр.
Как объясняется ниже, процессор сигналов 36 посредством этого преобразования преобразует сейсмограммы в координатах время-смещение, обрабатывает их различными способами в координатах преобразования, а затем преобразует обработанные сейсмограммы обратно в координаты время-смещение. За счет обработки в координатах преобразования процессор сигналов 36 может вносить кинематические поправки, различать желательные и нежелательные сейсмические сигналы и производить обработку иных типов, подробно описанных ниже.
Для ВПР параметр t, определяющий путь суммирования сквозь среду, выражен через параметры фронта сейсмической волны. Например, в описанных в настоящей заявке вариантах осуществления путь суммирования выражен через угол β входа (или выхода) и радиусы Rcre и Rcee кривизны волнового фронта, описанные выше. В альтернативных вариантах, однако, путь суммирования может быть задан через любой другой подходящий набор параметров, связанных с характеристиками фронта сейсмической волны. В числе наборов параметров волнового фронта, применимых для задания пути суммирования, можно для примера назвать параметры наклона, расфокусировки, несимметричной и/или сферической аберрации, применяемые, в частности, в оптике.
Применительно к описанным в настоящей заявке способам и системам суммирование ВПР обычно производят над большой суперподборкой, которая может содержать подборки ОПВ, ОПП, ОСТ или комбинацию подборок различных типов. Как правило, в суперподборку входят трассы, лежащие в первой зоне Френеля вокруг центральной точки Х0. В отличие от некоторых известных способов сейсмического анализа, которые работают с наборами трасс, прошедших тот или иной предварительный отбор или сортировку (например, трассы с общей средней точкой, общим источником или общим приемником), описанные здесь способы на основе ВПР могут работать на произвольной коллекции трасс без какой-либо сортировки.
Поскольку описанные в настоящей заявке способы не требуют какого-либо предварительного отбора трасс, они могут работать на больших коллекциях, обычно из нескольких тысяч трасс. А поскольку отношение сигнал-шум (ОСШ) обычно растет с ростом выборки, ОСШ и точность раскрытых здесь способов значительно выше, чем у известных.
В отдельных вариантах осуществления путь суммирования для ВПР задан как:

где

Rs и Rr обозначают радиусы кривизны дуги круга (или сферы), которым аппроксимируют волновые фронты в окрестностях источника и приемника соответственно, а σ - параметр фокусировки, определяемый как:
Приведенные выше формулы были найдены и представлены в работе Berkovitch, «The Multifocusing Method for Homeomorphic Imaging and Stacking of Seismic Data» (докторская диссертация, Тель-Авивский университет, 1995), которая включена в настоящую заявку по ссылке. Как видно из уравнения [3], параметры β, Rcre и Rcee - неизвестные. Параметры ΔХ+ и ΔХ- определяются геометрией системы сейсмической разведки, а V0 можно оценить наперед измерениями на поверхности.
В отдельных вариантах осуществления можно принять Rcee=∞, a Rcre для краткости обозначить Rcre=R, и тогда t в уравнении [3] зависит только от двух параметров - β и R. Приведенное выше уравнение для многофокусной модели и описанные ниже способы относятся к подборке любого подходящего типа вокруг центральной точки Х0. При описанной выше многофокусной модели каждый из параметров волнового фронта взаимно однозначно связан с единственной характеристикой подповерхностного отражателя. Как вариант, при вычислении вышеуказанных параметров могут применяться иные выражения и формулы аппроксимации. Некоторые из этих альтернативных способов можно считать частными случаями описанных в настоящей заявке способов.
Например, следующая формула для вычисления кинематических поправок представлена в работе Chira-Oliva et al., «2-D ZO CRS Stack by Considering an Acquisition Line with Smooth Topography», Revista Brasileira de Geofisica, том 23, №1, 2005 г., стр.1-18, которая включена в настоящую заявку по ссылке:

В уравнении [6], t обозначает время пробега луча туда и обратно, t0 - время пробега при нулевом смещении,  - угол выхода нормального луча, xm - координату средней точки, x0 - координату центральной точки, K0 - локальную кривизну земной поверхности в точке на линии сейсмической разведки, h - полусмещение, RN - радиус кривизны в точке x0 гипотетического N (нормального) волнового фронта, a RNIP - радиус кривизны в точке x0 гипотетического фронта волны NIP (точки нормального падения). Если в уравнение [3] подставить эквиваленты его членов в данной модели (Rcee=RN, Rcre=RNIP, X±=h, V0=v1) и разложить его в ряд Тейлора, легко видеть, что уравнение [6] есть гиперболическая аппроксимация уравнения [3].
- угол выхода нормального луча, xm - координату средней точки, x0 - координату центральной точки, K0 - локальную кривизну земной поверхности в точке на линии сейсмической разведки, h - полусмещение, RN - радиус кривизны в точке x0 гипотетического N (нормального) волнового фронта, a RNIP - радиус кривизны в точке x0 гипотетического фронта волны NIP (точки нормального падения). Если в уравнение [3] подставить эквиваленты его членов в данной модели (Rcee=RN, Rcre=RNIP, X±=h, V0=v1) и разложить его в ряд Тейлора, легко видеть, что уравнение [6] есть гиперболическая аппроксимация уравнения [3].
К каждой выборке (t0) центральной трассы процессор сигналов 36 применяет ВПР путем суммирования амплитуд сейсмической волны вдоль пути суммирования, заданного параметрами β и R из уравнения [3] для получения пространства ВПР. То есть, процессор сигналов посредством ВПР преобразует сейсмограмму d(t,x) в трехмерное пространство, координатами которого служат угол β входа (или выхода), радиус R кривизны и время перехвата τ. Это пространство здесь называется координатами ВПР или пространством преобразования. Операцию ВПР, таким образом, можно записать в виде:

Как показано ниже, в результате ВПР определенные сейсмические события обычно отображаются в сфокусированные области в пространстве преобразования. Например, первичные волны (т.е. сейсмические волны, однократно отразившиеся от данного отражателя, который надо показать на сейсмическом снимке) и многократные волны (т.е. волны, подвергшиеся многократным отражениям и обычно считающиеся шумом, который надо подавить или отделить от первичных волн) часто отображаются в различные области в координатах ВПР. Поэтому преобразование из координат время-смещение в координаты ВПР (координаты параметров волнового фронта) позволяет разделить желаемый сигнал и шум. Ниже описаны несколько приемов обработки сейсмограмм в координатах ВПР, использующих такое пространственное разделение.
На фиг.5 схематически показано преобразование между координатами время-смещение и координатами ВПР, согласно одному из вариантов осуществления настоящего изобретения. В примере на фиг.5 сейсмограмма 78 в координатах время-смещение содержит желательный сигнал 82 и шум 86. Шумовой артефакт может быть вызван, например, волнами, подвергшимися многократному отражению. Видно, что сигнал и шум перекрываются и сложно отделить одно от другого.
Сейсмограмму 78 описанными здесь способами преобразуют в трехмерный объем 90 в координатах ВПР. Координатными осями пространства ВПР служат время перехвата τ и параметры волнового фронта, в данном случае угол β выхода и радиус R кривизны. В альтернативных вариантах осуществления пространство ВПР может иметь более трех измерений. Например, это может быть четырехмерное пространство с осями τ, β, Rcre и Rcee. Процессор обычно представляет пространство ВПР в виде многомерного массива данных, например многомерной матрицы.
В координатах ВПР энергия сигнала 82 оказывается заключена в объеме 94, а энергия шума 86 - в объеме 98. Объемы 94 и 98 в координатах ВПР вполне отделены один от другого, что позволяет разрешить сигнал и шум.
ПОПРАВКИ В КООРДИНАТАХ ВПР
Преобразование сейсмограммы в координаты ВПР иногда вносит искажения в ее отображение. Типичные искажения показаны ниже на фиг.6А - фиг.6С.
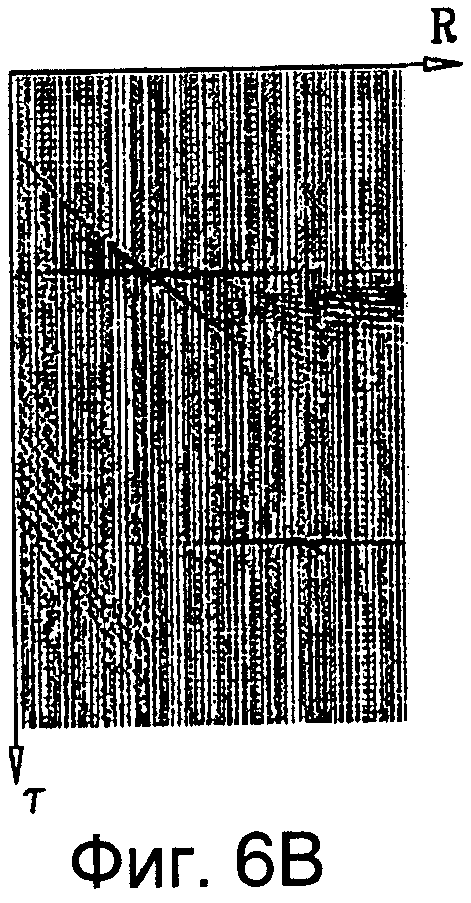
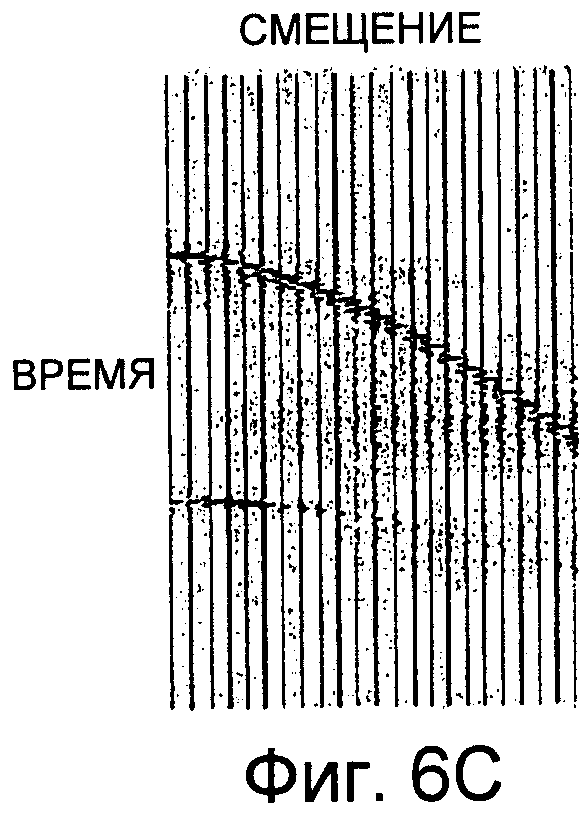
На фиг.6А - фиг.6С представлены сейсмические снимки, полученные на различных стадиях преобразования в координаты ВПР и обратно, согласно одному из вариантов осуществления настоящего изобретения. На фиг.6А показана сейсмограмма в координатах время-смещение. На ней видна сейсмическая картина с гиперболическим распределением времени прихода отраженных сигналов. На фиг.6В показана двумерная проекция на плоскость R-τ трехмерного объема, представляющего сейсмограмму с фиг.6А после выполнения ВПР. Двумерная проекция на фиг.6В получена суммированием слоев трехмерной функции u'(τ,β,R) по оси β.
Как видно на фиг.6В, преобразованная в координаты ВПР сейсмограмма приобрела как горизонтальное, так и наклонное размытие, обусловленное конечной апертурой преобразования. Горизонтальный артефакт в данном примере вызван передачей энергии при ближнем выносе, а наклонное размытие - отбрасыванием результатов при дальнем выносе. Также видны ложные события, вызванные ограниченной пространственно-временной выборкой (эффект Гиббса) и недостаточным интервалом пространственной дискретизации (ступенчатые искажения). На фиг.6С показана восстановленная сейсмограмма в координатах время-смещение, полученная обратным преобразованием трехмерного снимка в координатах ВПР. Нетрудно видеть, что сейсмограмма с фиг.6С не вполне корректно воспроизводит оригинальную сейсмограмму с фиг.6А.
Чтобы уменьшить искажения, вносимые преобразованием в координаты ВПР, процессор сигналов 36 вносит в данные соответствующие поправки. Могут использоваться различные виды поправок. Поправки могут вноситься в координатах ВПР, либо в пространственно-временных координатах после выполнения обратного ВПР преобразования. Коррекция может быть преобразованием в один прием или последовательностью итераций. Одна из основных проблем, связанных с обобщенным преобразованием Радона, заключается в том, что для него не всегда существует обратный оператор.
Для нахождения приближенных способов реконструкции данных путем обратного преобразования Радона была проделана значительная экспериментальная и исследовательская работа.
Например, преобразование Радона по способу наименьших квадратов предлагалось в цитировавшейся выше работе Thorson, Claerbout. Преобразование Радона для разреженной выборки предложено в работе Trad et al., «Accurate Interpolation with High-Resolution Time-Variant Radon Transforms» Geophysics, том 67, №2, март 2002 г., стр.644-656, которая включена в настоящую заявку по ссылке. Итеративный способ предложен в работе Fomel, «Least-Square Inversion with Inexact Adjoins. Method of conjugate directions: A Tutorial», отчет Stanford Exploration Project SEP-92, 1996 г., стр.253-265, которая включена в настоящую заявку по ссылке. Способы с высокой четкостью описаны, например, в патентах №№ US 6636809 и US 6832161, которые включены в настоящую заявку по ссылке, а также в работе Hugonnet et al., «High Resolution Radon: a Review», 63-я конференция и выставка техники EAGE, Амстердам, Нидерланды, 11-15 июня 2001 г., которая включена в настоящую заявку по ссылке.
В нижеследующем описании для решения обратной задачи наименьших квадратов применяется хорошо известный способ регуляризации Тихонова. Регуляризация Тихонова описана, например, в работе Thamban et al., «The Trade-Off between Regularity and Stability in Tikhonov Regularization», Mathematics and Computation, том 66, №217, январь 1997 г., стр.193-206, которая включена в настоящую заявку по ссылке. Для внесения поправок в данные перед обратным преобразованием Радона можно применять любой из перечисленных выше способов. Обобщение обратного преобразования для трехмерного случая представлено ниже и служит для коррекции данных в координатах ВПР.
В дискретном случае обратное преобразование из трехмерного пространства обратно в координаты время-смещение имеет вид:

где t(β,R) - путь суммирования, определяемый по уравнению [3]. Уравнение [7] можно обратить в матрицу, полагая:

Поскольку способы коррекции в пространственно-временных координатах обычно требуют большого объема вычислений, процессор 36 в данном варианте осуществления производит коррекцию в частотных координатах (хотя коррекция в пространственно-временных координатах также возможна). Как описано, например, в работе Treitel et al., «Plane-wave decomposition of seismograms», цитировавшейся выше, применив преобразование Фурье к уравнению [8], имеем:

Преобразование Фурье для уравнения [9] можно записать в виде:

Уравнение [7] можно записать в матричной форме как:

где L - оператор ВПР, который интегрирует данные в пространственно-временных координатах вдоль пути суммирования, определяемого уравнением [3]. Оператор L имеет вид:
Обратное преобразование Фурье для уравнения [12] имеет вид:

где  - восстановленные данные в координатах время-смещение, а
- восстановленные данные в координатах время-смещение, а  - их модельное представление [в координатах ВПР]. L* представляет собой оператор, который интегрирует данные в трехмерном пространстве с параметрами (τ,β,R) волнового фронта в качестве осей вдоль обращенного пути суммирования, определяемого уравнением [3], т.е. оператор, обратный ВПР. L* имеет вид:
- их модельное представление [в координатах ВПР]. L* представляет собой оператор, который интегрирует данные в трехмерном пространстве с параметрами (τ,β,R) волнового фронта в качестве осей вдоль обращенного пути суммирования, определяемого уравнением [3], т.е. оператор, обратный ВПР. L* имеет вид:

В данном примере процессор сигналов 36 вносит поправки, вычисляя такую оценку u(ω,β,R), которая имела бы четкость выше, чем в традиционных способах с ОСТ (наклонное суммирование, параболическое и гиперболическое преобразования Радона), такую, при которой разность e(t,x) между фактической входной подборкой d(t,x) и ее моделью  в координатах время-смещение была минимальна в смысле наименьших квадратов. Иначе говоря, процессор 36 корректирует модель
в координатах время-смещение была минимальна в смысле наименьших квадратов. Иначе говоря, процессор 36 корректирует модель  из уравнения [12] посредством решения задачи наименьших квадратов, формулируемой в виде:
из уравнения [12] посредством решения задачи наименьших квадратов, формулируемой в виде:

Решение уравнения [16] имеет вид:

где u - данные в координатах ВПР с внесенными поправками, H=LL* - оператор преобразования Фурье, а Н* - корректирующий оператор (матрица), применяемый  - псевдообратному оператору ВПР. Применяя обратное ВПР преобразование к скорректированной модели, имеем:
- псевдообратному оператору ВПР. Применяя обратное ВПР преобразование к скорректированной модели, имеем:

где d - скорректированная входная подборка (данные).
В отдельных вариантах осуществления для перехода к обработке в координатах ВПР процессор 36 производит преобразование из частотных координат в пространственно-временные, а затем обратное ВПР преобразование согласно приведенному выше уравнению [8].
Процессор определяет матрицу Hω поправок из уравнений [13] и [15].
Матрица поправок имеет вид:

где t(β,R,x) - кинематическая поправка, вычисляемая из уравнения [3] над всеми смещениями и подборками в суперподборке.
Процессор 36 вычисляет поправки для всех частотных срезов ω=ωmin…ωmax трехмерного объема  . После внесения поправок процессор сигналов преобразует объем и из частотных в пространственно-временные координаты, а затем производит обратное ВПР преобразование.
. После внесения поправок процессор сигналов преобразует объем и из частотных в пространственно-временные координаты, а затем производит обратное ВПР преобразование.
В отдельных случаях, однако, уравнение [16] наименьших квадратов плохо обусловлено, а его решение [17] - не единственное, поскольку матрица Н вырожденная. Процессор 36 может решить плохо обусловленную задачу наименьших квадратов, например, применяя известные способы для высокой четкости. В цитировавшихся выше работах описано несколько примеров таких способов, которые можно применить для этой цели.
Способы с высокой четкостью обычно предлагают устранить проблему плохой обусловленности, сформулировав заново исходную задачу наименьших квадратов. Например, можно получить из исходных данных положительные весовые коэффициенты, чтобы уложить решение в соответствующие диапазоны данных:

где W - матрица весовых коэффициентов, в которой используется некоторая априорная мера когерентности, определенная над данными. Например, весовые коэффициенты можно выбрать из самих данных:

Соответствующее решение задачи наименьших квадратов имеет вид:

Задачу наименьших квадратов можно решить способом регуляризации Тихонова:

где D - дифференциальный оператор первого порядка, ∇ - оператор Лапласа, а λ, µ, ρ - положительные весовые коэффициенты. Эта задача наименьших квадратов отдает предпочтение такому частному решению (для данных λ, µ, ρ), что большие значения λ отдают предпочтение решениям с меньшими нормами, а µ и ρ обычно влекут нахождение более гладких решений.
Решение отыскивается в явном виде:

Эффективность процесса коррекции демонстрируют фиг.7А - фиг.7С, фиг.8А - фиг.8С и фиг.9А - фиг.9F.
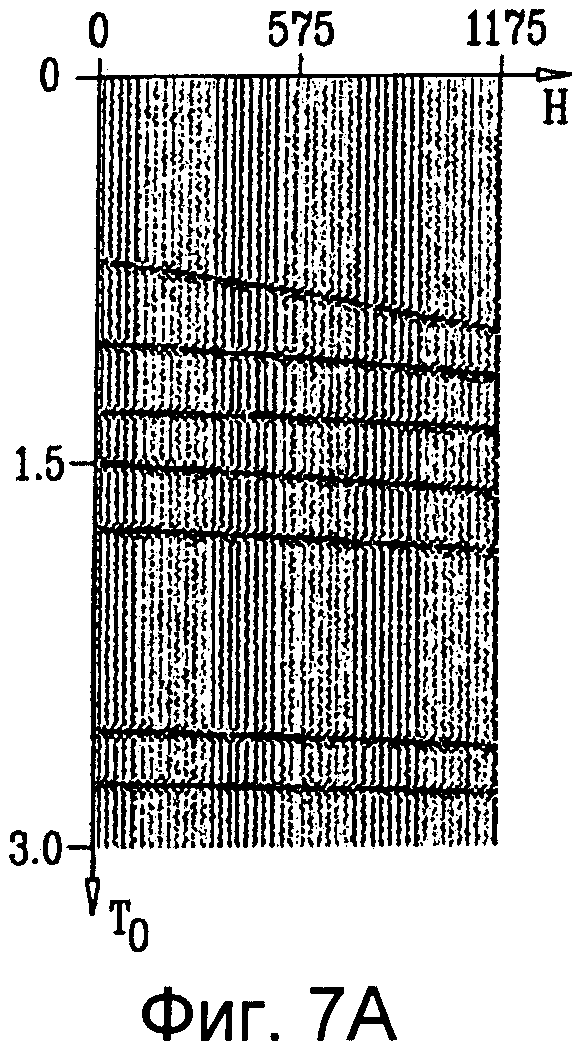
На фиг.7А - фиг.7С показаны смоделированные на компьютере сейсмограммы до и после ВПР, но без внесения поправок согласно одному из вариантов осуществления настоящего изобретения. На фиг.7А показана исходная сейсмограмма в координатах время-смещение. На фиг.7В - восстановленная сейсмограмма, полученная последовательным ВПР и обратным преобразованием, без внесения поправок. На фиг.7С показаны различия между исходной и восстановленной сейсмограммами. Нетрудно видеть, что ВПР и обратное преобразование внесли искажения в восстановленную сейсмограмму. Искажения отчетливо видны на фиг.7В и фиг.7С.
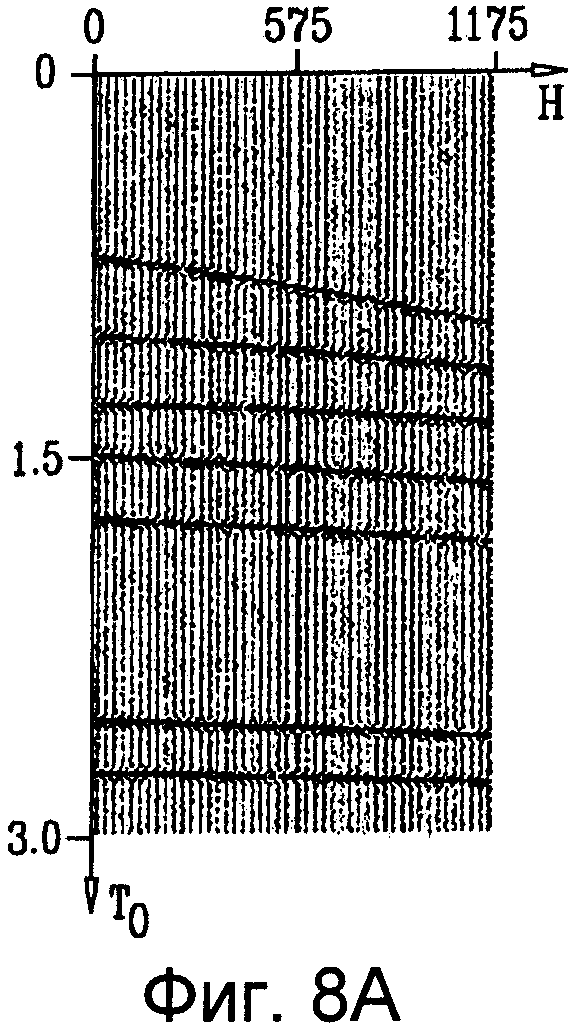
На фиг.8А - фиг.8С представлены смоделированные на компьютере сейсмограммы до и после ВПР, с коррекцией данных в координатах ВПР согласно одному из вариантов осуществления настоящего изобретения. На фиг.8А показана исходная сейсмограмма в координатах время-смещение. На фиг.8В - восстановленная сейсмограмма, полученная последовательным ВПР и обратным преобразованием. В этом примере, однако, процессор 36 производит коррекцию данных для уменьшения искажений. На фиг.8С показаны различия между исходной и восстановленной сейсмограммами. Как видно на фиг.8В и фиг.8С, восстановленная сейсмограмма весьма сходна с оригиналом, а искажения по существу исключены.
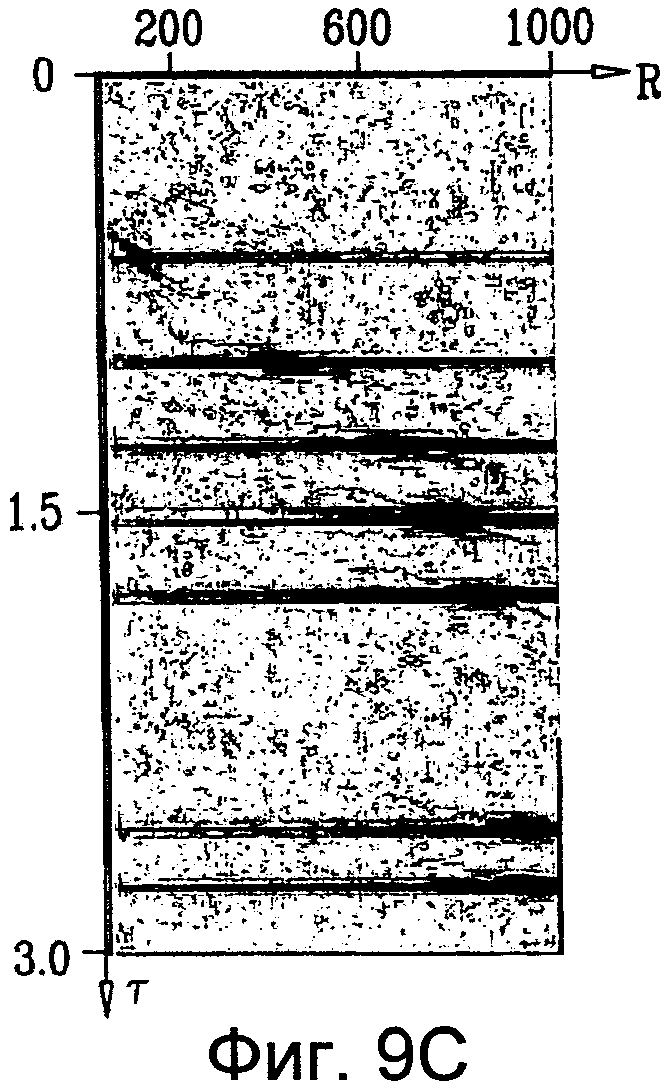
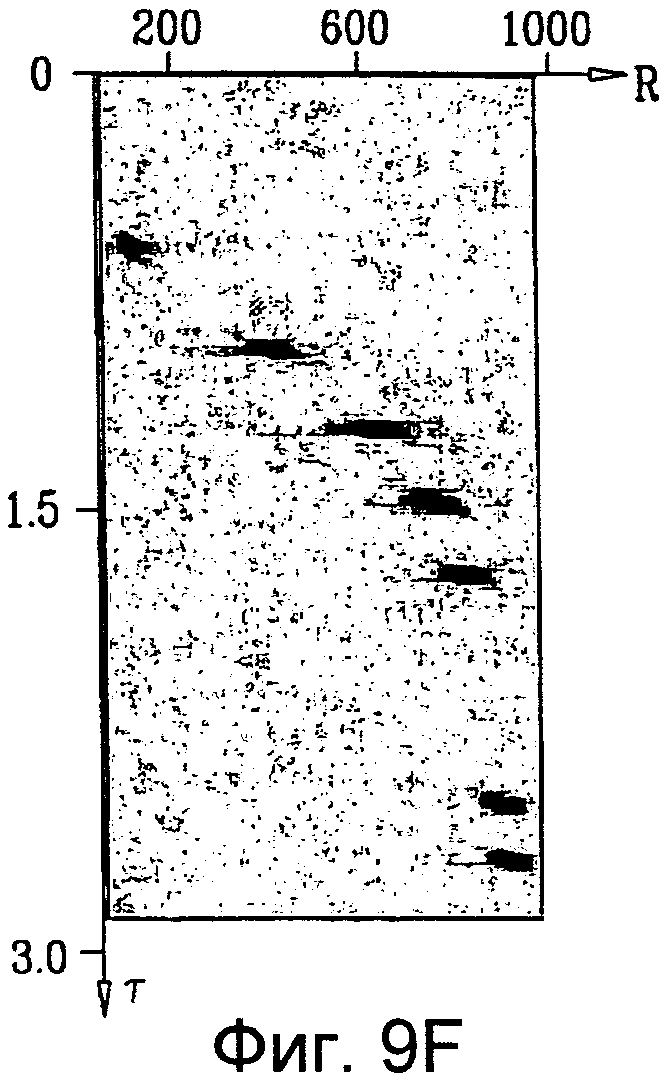
На фиг.9А - фиг.9F представлены графики, на которых показаны двумерные проекции трехмерных сейсмических снимков в координатах ВПР, с коррекцией и без коррекции, согласно вариантам осуществления настоящего изобретения. На фиг.9А - фиг.9С показаны проекции трехмерного пространства ВПР на плоскости R-β, β-τ и R-τ соответственно для случая, когда коррекция не производится. На фиг.9D - фиг.9F показаны соответственно проекции на плоскости R-β, β-τ и R-τ для случая с коррекцией. Нетрудно видеть, что сейсмические события, показанные на фиг.9D - фиг.9F, намного лучше сфокусированы в четко определенных областях трехмерного пространства ВПР, нежели в случае на фиг.9А - фиг.9С.
ОПИСАНИЕ СПОСОБА ОБРАБОТКИ СЕЙСМИЧЕСКИХ ДАННЫХ
На фиг.10 приведена блок-схема, иллюстрирующая алгоритм способа анализа сейсмических данных с применением ВПР согласно одному из вариантов осуществления настоящего изобретения. Применяя способ с фиг.10, система 20 отображает определенные подповерхностные структуры и представляет результаты отображения пользователю. Алгоритм начинается с получения системой 20 на этапе 100 набора сейсмических трасс, который называется суперподборкой. В числе трасс могут быть подборки ОПВ, ОПП, ОСТ, комбинация подборок различных типов или любая подходящая коллекция трасс. Поскольку описанные в настоящей заявке способы не требуют какого-либо предварительного отбора или сортировки трасс, суперподборка может насчитывать сотни или тысячи трасс.
Процессор сигналов 36 применяет ВПР к входной суперподборке на этапе 102. Иначе говоря, как объяснялось выше, процессор сигналов преобразует входную суперподборку в многомерный массив данных, определенный через параметры волнового фронта. Например, процессор 36 может выполнять ВПР в частотных координатах согласно уравнениям [12] и [13]. Процессор сигналов вычисляет объем  .
.
Затем процессор 36 производит коррекцию данных в координатах ВПР на этапе внесения поправок 104. Процессор вносит поправки в объем  , частота за частотой, с применением выражения из уравнения [17]. То есть для каждой из частот в диапазоне ω=ωmin…ωmax, срез
, частота за частотой, с применением выражения из уравнения [17]. То есть для каждой из частот в диапазоне ω=ωmin…ωmax, срез  обрабатывают для получения скорректированного объема u(ω,β,R). Процессор преобразует объем u(ω,β,R) в пространственно-временные координаты на этапе 106. Обычно для получения объема u(t,β,R) процессор применяет быстрое преобразование Фурье к соответствующим векторам для каждой пары значений β и R.
обрабатывают для получения скорректированного объема u(ω,β,R). Процессор преобразует объем u(ω,β,R) в пространственно-временные координаты на этапе 106. Обычно для получения объема u(t,β,R) процессор применяет быстрое преобразование Фурье к соответствующим векторам для каждой пары значений β и R.
Процессор сигналов 36 обрабатывает объем u(t,β,R) в координатах ВПР на этапе обработки 108. Процессор 36 может применять в координатах ВПР различные способы, такие как подавление многократных отражений, интерполяция сейсмограмм, декомпозиция волн на основе скорости или угла выхода, скоростной анализ, фильтрация, миграция и другие. Эти процессы подробно объясняются ниже. Обработка в координатах ВПР позволяет повысить достижимое качество изображений в суперподборке.
После обработки данных в координатах ВПР процессор 36 преобразует их обратно в координаты время-смещение посредством обратного ВПР преобразования на этапе 110. Результатом этапа 110 становится другая коллекция трасс, именуемая улучшенной входной суперподборкой.
Процессор сигналов строит сейсмическое изображение разведанных подповерхностных структур по улучшенной суперподборке. Например, он может вносить кинематические поправки, вычисляемые любым подходящим способом, либо же комбинировать трассы в улучшенной суперподборке для получения единственной композитной трассы, которая представляет разведанные подповерхностные структуры.
Процессор сигналов 36 выводит результаты обработки на этапе 112. Результат обычно представляет собой композитную трассу, которая вобрала в себя полученную из улучшенной суперподборки информацию о подземной структуре. Как вариант, результатом является одна или несколько подборок ОСТ, получаемых отбором подходящих трасс из улучшенной суперподборки. Результат представляют пользователю посредством устройства вывода 40.
Из-за обработки в координатах ВПР качество изображения обработанной суперподборки улучшено по сравнению с исходной. В данном контексте под «улучшенным качеством изображения» понимается всякое повышение возможности опознать, выяснить характеристики или отобразить те или иные подповерхностные структуры. Например, под улучшенным качеством изображения может пониматься повышенное ОСШ, повышенная четкость и/или подавление нежелательных артефактов на сейсмическом снимке.
ПОДАВЛЕНИЕ ШУМА
Специалистам хорошо известно, что при суммировании N выборок данных, искаженных случайным шумом, отношение сигнал-шум (ОСШ) растет пропорционально  . Как описано выше, применение прямого и обратного ВПР преобразования подразумевает суммирование большого числа трасс, вплоть до нескольких тысяч. По этой причине описанным в настоящей заявке способам внутренне присуще подавление шума. Как видно, например, на фиг.7В и фиг.8В, энергия шума после прямого и обратного ВПР преобразования в значительной мере подавлена по сравнению с энергией полезного сигнала.
. Как описано выше, применение прямого и обратного ВПР преобразования подразумевает суммирование большого числа трасс, вплоть до нескольких тысяч. По этой причине описанным в настоящей заявке способам внутренне присуще подавление шума. Как видно, например, на фиг.7В и фиг.8В, энергия шума после прямого и обратного ВПР преобразования в значительной мере подавлена по сравнению с энергией полезного сигнала.
Таким образом, описанные в настоящей заявке способы и системы можно применять для повышения качества исходных данных сейсморазведки. Исходные подборки регуляризуются, а их ОСШ возрастает по сравнению с традиционными подборками OCT. Исходные данные повышенного качества можно использовать для любой последующей обработки, например, миграции в глубинной области. (Подробнее миграционные процессы рассмотрены ниже.) Исходные суперподборки после глубинной миграции, прямого и обратного ВПР преобразования дают тонкий контроль над скоростной моделью, применяемой в миграционном процессе. Традиционная обработка для ОСТ такого контроля не дает.
ПОДАВЛЕНИЕ МНОГОКРАТНЫХ ОТРАЖЕНИЙ
Первичными отражениями называются волны, однократно отразившиеся от некоторой подземной структуры перед поступлением в приемник. Только первичные отражения несут полезную информацию о разведываемых структурах. Однако некоторые из артефактов на сейсмограммах в координатах время-смещение вызваны многократными отражениями, т.е. волнами, многократно отразившимися от нескольких отражателей перед поступлением в приемник. Поскольку многократные отражения интерферируют с первичными, весьма желательно подавить их для повышения качества изображения.
Поскольку первичное и многократные отражения часто различаются по скорости, они часто отображаются на различные области в координатах ВПР (например, t, β, R). В отдельных вариантах осуществления настоящего изобретения оператор с подсказки сигнального процессора 36 разделяет многократные и первичные отражения после выполнения ВПР (например, на этапе 108 алгоритма с фиг.10), после чего подавляет отделенные многократные отражения. Например, процессор может обнулять, отфильтровать или иным образом подавить области в пространстве ВПР, которые были опознаны как области многократных отражений. В результате, уровень многократных отражений на восстановленной сейсмограмме (после обратного ВПР преобразования) существенно снижается. Эффективность подавления многократных отражений демонстрируется на фиг.11, фиг.12А - фиг.12В, фиг.13А - фиг.13С и фиг.14А - фиг.14В.
На фиг.11 представлена смоделированная на компьютере сейсмограмма 116, содержащая артефакты, вызванные многократными отражениями. В данном примере сейсмограмма 116 представляет собой суперподборку множества подборок ОПВ. На увеличенном фрагменте 120 показана одиночная подборка ОПВ. Отчетливо видны артефакты, вызванные многократными отражениями.
На фиг.12А и фиг.12В представлены смоделированные на компьютере восстановленные сейсмограммы после прямого и обратного ВПР преобразования согласно вариантам осуществления настоящего изобретения. Исходная сейсмограмма, для которой получены две восстановленные, содержит многократные отражения, подобно сейсмограмме с фиг.11. При получении сейсмограммы с фиг.12А процессор 36 не производил подавления многократных отражений. При получении же сейсмограммы с фиг.12В процессор подавил области в пространстве ВПР, содержавшие компоненты многократных отражений. Отчетливо видно, что уровень нежелательных артефактов на фиг.12В значительно ниже, чем на фиг.12А.
На фиг.13А - фиг.13С представлены смоделированные на компьютере двумерные проекции трехмерного пространства ВПР, на которых показано разделение первичного и многократных отражений согласно одному из вариантов осуществления настоящего изобретения. Показаны проекции пространства ВПР на плоскость R-τ (с интегрированием над осью β). На фиг.13А показана проекция исходного пространства ВПР до подавления многократных отражений. Видно, что первичное и многократные отражения отображаются в пространстве ВПР на отдельные хорошо очерченные области. На фиг.13В показаны только многократные отражения при обнулении первичного отражения, а на фиг.13С показано только первичное отражение при обнулении многократных отражений.
На фиг.14А и фиг.14В представлены смоделированные на компьютере сейсмические снимки, на которых видно разделение первичного и многократных отражений согласно одному из вариантов осуществления настоящего изобретения. На фиг.14А показана восстановленная суперподборка 124 (после прямого и обратного ВПР преобразований), на которой первичные отражения были обнулены в пространстве ВПР, чтобы сохранить многократные отражения. На фиг.14В показана восстановленная суперподборка 128, на которой вторичные отражения были обнулены в пространстве ВПР, чтобы сохранить первичные отражения. Фиг.14А была получена применением обратного ВПР преобразования к объему с фиг.13В, а фиг.14В - к объему с фиг.13С.
На фиг.15А и фиг.15В представлены сейсмические снимки, на которых показано разделение первичного и многократных отражений согласно одному из вариантов осуществления настоящего изобретения. Слева на фиг.15А представлен реальный многофокусный суммарный разрез, полученный суммированием суперподборок с многократными отражениями на интервале 2.5-3.5 с. Видно, что наиболее мощное многократное отражение приходится приблизительно на момент 3.3 с. Справа на фиг.15А представлена проекция соответствующего пространства ВПР на плоскость Rcre - τ. Области, ассоциированные с первичным и многократными отражениями, разделены штриховой линией. На фиг.15В представлен многофокусный суммарный разрез, полученный суммированием суперподборок после прямого ВПР, внесения поправок, обнуления многократных отражений и обратного ВПР преобразования.
ИНТЕРПОЛЯЦИЯ ТРАСС ПОСРЕДСТВОМ ВПР
В отдельных вариантах осуществления преобразование Радона на метрике волнового фронта можно использовать для интерполяции сейсмограмм в координатах время-смещение. Интерполировать можно сейсмограммы в любой координатной системе, например, ОПВ, ОПП или OCT. Интерполяция полезна, например, когда на сейсмограмме в координатах время-смещение отсутствуют отдельные трассы, в частности, в результате сбоев оборудования или поскольку не было возможности расположить приемники или источники на определенных смещениях. Интерполяция между существующими трассами может повысить четкость сейсмограммы и скомпенсировать отсутствие трасс. Обычно интерполяцию производят во время обратного ВПР преобразования путем восстановления трасс суперподборки для точек (координат), расположенных между исходными трассами.
На фиг.16А и фиг.16В представлены смоделированные на компьютере сейсмические снимки, на которых показан способ интерполяции трасс посредством ВПР согласно одному из вариантов осуществления настоящего изобретения. На фиг.16А представлена исходная сейсмограмма с 23 трассами. На фиг.16В представлена восстановленная сейсмограмма после прямого и обратного ВПР преобразований. Она имеет большую четкость по оси смещений и насчитывает 45 трасс.
ДЕКОМПОЗИЦИЯ ВОЛН ПОСРЕДСТВОМ ВПР
Обработка в координатах ВПР может служить для декомпозиции сейсмических волн на основе различных параметров. Например, поскольку R зависит от Vst, его можно использовать для дискриминации по скорости. Дискриминация по скорости применялась в примерах на фиг.13А - фиг.13С для разделения первичных и многократных отражений. Вместе с этим или вместо этого дискриминацию можно проводить на основе β (см., например, фиг.9Е) или на основе R и β одновременно.
На фиг.17А - фиг.17С представлены смоделированные на компьютере сейсмические снимки, на которых показана декомпозиция волн посредством ВПР согласно одному из вариантов осуществления настоящего изобретения. На фиг.17А показана проекция пространства ВПР на плоскость β-τ (с интегрированием над осью R). Линия 130 дискриминатора служит для дискриминации по β и τ одновременно. На фиг.17В представлена восстановленная сейсмограмма, полученная обнулением области под линией 130. На фиг.17С представлена восстановленная сейсмограмма, полученная обнулением области над линией 130. Отчетливо видно, что на фиг.17В и фиг.17С показаны совершенно различные сейсмические события, эффективно дискриминированные в пространстве ВПР по β и τ.
СКОРОСТНОЙ АНАЛИЗ
Обработка в координатах ВПР может служить для скоростного анализа, например, для компенсации разности скоростей сейсмических волн. Скоростная компенсация полезна, например, для выравнивания различных трасс в выходной суперподборке по скорости волны, чтобы получить оптимальное суммирование трасс. Например, процессор 36 может вычислять проекцию объема ВПР на плоскость τ-R путем интегрирования над осью β для получения данных о скоростях.
ФИЛЬТРАЦИЯ
Процессор 36 может выполнять фильтрацию различных типов на объеме ВПР (например, u(τ,β,R)) или, по крайней мере, на части этого объема. Такая фильтрация может предусматривать полосовую фильтрацию, обращение свертки для компенсации искажений, вызванных преобразованием Радона, фильтрацию сжатия для локализации энергии отраженных сейсмических волн (например, для корректного осуществления обратного преобразования), а также любые другие пригодные приемы фильтрации.
МИГРАЦИЯ
Миграция сейсмических данных - хорошо известный прием, в котором в собранные данные вносят поправку для учета наклона оси синфазности, т.е. неплоскости геофизических слоев. В отдельных вариантах осуществления миграцию можно выполнять на улучшенной суперподборке, после прямого и обратного ВПР преобразования. В этих вариантах осуществления иногда возможно использовать видимые на улучшенной суперподборке наклоны для установления истинного расположения подповерхностных областей. Такой процесс может потребовать знания распределения скоростей под поверхностью. Для подземной среды с постоянной скоростью миграцию можно выполнить простыми тригонометрическими вычислениями. В более сложных случаях, однако, для миграционных вычислений необходима модель распределения скоростей по глубине.
Так, в отдельных вариантах осуществления процессор сигналов 36 выполняет миграцию в координатах ВПР, т.е. применяет ее к многомерному массиву данных, определяемому параметрами волнового фронта, после прямого, но до обратного ВПР преобразования. Например, миграцию можно выполнить на описанном выше трехмерном ВПР-представлении u(τ,β,R), хотя эти способы применимы к любому другому пространству ВПР. В отдельных вариантах осуществления каждая точка исследуемой подземной области считается источником дифракционных волн, распространяющихся во всех направлениях.
Процессор 36 посредством прямого ВПР вычисляет различные кубы u(τ,β,R) для всех центральных точек сейсмического профиля. Затем процессор определяет скользящее окно шириной в N кубов вдоль сейсмического профиля и производит миграционную поправку посредством этого окна. Для вычисления поправок можно применять любую подходящую модель или формулу. Например, некоторые формулы описывают поведение дифракционной волны, достигающей поверхности. Такие формулы обычно зависят от Vst и положения различных выборок среди N кубов скользящего окна. Пример такой формулы описан в цитировавшейся выше патентной заявке № US 11/900,243.
Процессор 36 вычисляет скорректированный куб в координатах ВПР для каждых N входных кубов. Скорректированные кубы затем преобразуют в координаты время-смещение посредством обратного ВПР преобразования, как описано выше. Как вариант, процессор 36 может применять любые другие подходящие приемы для выполнения миграции в координатах ВПР.
Хотя варианты осуществления настоящего изобретения описывались выше применительно к обработке именно сейсмических данных и построению изображений подповерхностных структур, принципы настоящего изобретения сходным образом применимы к построению изображений однородных сред иного типа, например, в томографии или в других технологиях неразрушающего контроля. Определенные выше для обработки сейсмических данных параметры также применимы в сейсмической томографии, к методике Острандера, для вычисления статических поправок (поправок на влияние приповерхностных слоев), обработки Deep Moveout (DMO) и подобных приложениях. В координатах ВПР можно производить различные виды предварительной обработки данных, как то обнуление, удаление, фильтрацию, обращение свертки, нормализацию и многие другие.
Подразумевается, что описанные выше варианты осуществления настоящего изобретения служат исключительно для примера, а самое изобретение не ограничивается непосредственно описанным и показанным выше. Напротив, настоящее изобретение охватывает комбинации различных описанных выше признаков, а также их варианты и модификации, не известные из уровня техники, но очевидные для специалиста по прочтении настоящего описания.























Изобретение относится к области геофизики и может быть использовано при зондировании подповерхностных структур. Заявлено устройство обработки сейсмических данных, содержащее группу источников и приемников сейсмических сигналов, генерирующих суперподборки трасс. Устройство также содержит процессор сигналов, предназначенный определять метрику преобразования Радона относительно набора параметров фронта сейсмических волн. Преобразование определяет сложение амплитуд сейсмических волн вдоль траекторий, определяемых параметрами волнового фронта. Процессор выполнен с возможностью применять преобразование Радона к первой коллекции трасс, преобразуя ее в многомерный массив данных, определяемый как функция по меньшей мере двух из параметров волнового фронта, а также обрабатывать многомерный массив данных для получения второй коллекции трасс, качество изображения в которой выше, чем в первой коллекции, а также предназначенный обрабатывать вторую коллекцию трасс для построения сейсмического снимка подповерхностных структур. Технический результат - повышение качества изображения сейсмического снимка подповерхностных структур. 17 з.п. ф-лы, 36 ил.
1. Устройство обработки сейсмических данных, содержащее группу источников и приемников сейсмических сигналов, размещенных на земной поверхности и управляемых таким образом, чтобы вызвать распространение под земной поверхностью сейсмических волн и генерирование на приемниках суперподборки, содержащей первую коллекцию трасс, показывающих изменение во времени принимаемых сигналов, обусловленное отражениями сейсмических волн от подповерхностных структур, процессор сигналов, предназначенный определять метрику преобразования Радона относительно набора параметров фронта сейсмических волн, причем преобразование определяет сложение амплитуд сейсмических волн вдоль траекторий, определяемых параметрами волнового фронта, а также предназначенный применять преобразование Радона к первой коллекции трасс, преобразуя ее в многомерный массив данных, определяемый как функция по меньшей мере двух из параметров волнового фронта, а также предназначенный обрабатывать многомерный массив данных для получения второй коллекции трасс, качество изображения в которой выше, чем в первой коллекции, а также предназначенный обрабатывать вторую коллекцию трасс для построения сейсмического снимка подповерхностных структур с повышенным качеством изображения.
2. Устройство по п.1, отличающееся тем, что процессор сигналов предназначен производить преобразование, обработку многомерного массива данных и второй коллекции безотносительно к расположению первых точек, в которых порождались сейсмические волны, вторых точек, в которых принимались сигналы, а также средних между первыми и вторыми точек.
3. Устройство по п.1, отличающееся тем, что многомерный массив данных имеет три или более измерения, отвечающие по меньшей мере двум из параметров волнового фронта и времени пробега сейсмических волн.
4. Устройство по любому из пп.1-3, отличающееся тем, что в число параметров волнового фронта входят угловой параметр и по меньшей мере один радиус кривизны фронта волны, исходящей от подповерхностного отражателя.
5. Устройство по п.4, отличающееся тем, что угловой параметр есть угол выхода волны, а по меньшей мере один радиус кривизны представляет собой соответственно радиус волнового фронта с отражением от общей точки или с отражением от общего участка.
6. Устройство по любому из пп.1-3, отличающееся тем, что процессор сигналов предназначен производить коррекцию искажений, внесенных в многомерный массив данных в результате применения преобразования Радона.
7. Устройство по п.6, отличающееся тем, что процессор сигналов предназначен производить частотное преобразование многомерного массива данных с коррекцией искажений в частотных координатах.
8. Устройство по п.6, отличающееся тем, что процессор сигналов предназначен производить коррекцию искажений в пространственно-временных координатах.
9. Устройство по п.6, отличающееся тем, что процессор сигналов предназначен производить коррекцию искажений путем итеративной корректирующей обработки многомерного массива данных.
10. Устройство по любому из пп.1-3, отличающееся тем, что процессор сигналов предназначен различать первые сейсмические события, вызванные однократным отражением, и вторые сейсмические события, вызванные многократными отражениями, которые трансформируются соответственно в первые и вторые области многомерного массива данных.
11. Устройство по п.10, отличающееся тем, что процессор сигналов предназначен обнулять первую или вторую область в многомерном массиве данных.
12. Устройство по пп.1-3, отличающееся тем, что процессор сигналов предназначен задавать первую и вторую области в многомерном массиве данных как функцию по меньшей мере двух параметров волнового фронта.
13. Устройство по любому из пп.1-3, отличающееся тем, что процессор сигналов предназначен производить фильтрацию по меньшей мере части данных многомерного массива.
14. Устройство по любому из пп.1-3, отличающееся тем, что процессор сигналов предназначен производить интерполяцию данных в многомерном массиве данных для увеличения числа трасс во второй коллекции по сравнению с первой.
15. Устройство по любому из пп.1-3, отличающееся тем, что процессор сигналов предназначен путем обработки многомерного массива данных производить компенсацию различия скоростей сейсмических волн.
16. Устройство по любому из пп.1-3, отличающееся тем, что процессор сигналов предназначен производить миграцию в многомерном массиве данных.
17. Устройство по любому из пп.1-3, отличающееся тем, что процессор сигналов предназначен интегрировать входящие во вторую коллекцию трассы для получения композитной трассы, представляющей подповерхностные структуры.
18. Устройство по любому из пп.1-3, отличающееся тем, что процессор сигналов предназначен при обработке многомерного массива данных применять к нему обратное преобразование Радона для получения второй коллекции трасс.
| Светосильный широкоугольный объектив | 1977 |
|
SU619887A1 |
| EP 923745 B1, 27.02.2008 | |||
| US 20070282535 A1, 06.12.2007 | |||
| US 20070280050 A1, 06.12.2007 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБРАБОТКИ СЕЙСМИЧЕСКОГО СИГНАЛА И ПРОВЕДЕНИЯ РАЗВЕДКИ ПОЛЕЗНЫХ ИСКОПАЕМЫХ | 1996 |
|
RU2187130C2 |

