Изобретение относится к обработке сейсмических данных в области геофизики и может быть использовано при проведении сейсморазведочных работ. Способы, изложенные в изобретении, имеют много общего со способами обработки данных в других областях науки и техники, в которых проводится анализ и преобразование двух или трехмерных массивов данных (растровые изображения, видео, скалярные поля и т.п.).
В основе методов обработки и интерпретации сейсмических данных лежат математические модели волновых полей, регистрируемых наземными, морскими или скважинными методами сейсморазведки (метод общей глубинной точки - МОГТ, вертикальное сейсмическое профилирование - ВСП, метод преломленных волн - МПВ, метод непрерывного сейсмического профилирования - НСП и т.п.).
В терминологии сейсмических волновых полей существует основополагающее понятие регулярной волны - волны, которая «характеризуется достаточно высокой устойчивостью кинематических и динамических параметров в пределах области наблюдения» [1]. Параллельно понятию регулярности волны используется понятие пространственной когерентности колебаний - «если разность фаз, а также соотношения амплитуд колебаний сохраняются неизменными (или почти неизменными), то тогда колебания будут когерентными (или почти когерентными)» [2].
Одними из наиболее известных и неотъемлемых этапов обработки и интерпретации сейсмических данных, базирующихся на понятии регулярности и когерентности, являются задачи прослеживания сейсмических волн и выявления зон тектонических деформаций и зон трещиноватости. Известные литературные источники рассматривают эти задачи раздельно, а существующие алгоритмы решают их независимо. В данном изобретении показаны способы, объединяющие решение этих двух задач единым подходом.
Термин "прослеживание волн", "корреляция волн" или "horizon piking" часто понимается по-разному, мы будем подразумевать под этим понятием задачу восстановления уравнения волны Т(ρ) либо другого уравнения, описывающего время прихода какой-либо особенности волны (максимума огибающей, максимума сигнала, момент вступления и т.д.) в точку наблюдения ρ [3]. В приложении к обработке сейсмограмм время прихода волны называют уравнением годографа волны (или просто годограф). В приложении к интерпретации временных сейсмических кубов или разрезов, применяют термин горизонт, т.к. связывают целевую волну с границей раздела конкретных геологических толщ. Основное отличие годографов от горизонтов заключается в предположении наличия пересечений годографов различных типов волн (продольных, поперечных, падающих, отраженных и т.п.), в то время как горизонты, хотя и могут иметь разрывы, должны быть упорядочены по времени/глубине (т.е. один горизонт всегда лежит строго выше или ниже другого) и, в отдельных случаях, могут иметь конечное количество точек соприкосновения. В общем случае горизонты/годографы описываются нелинейными и разрывными функциями, однако в большинстве случаев могут быть аппроксимированы кусочно-линейными функциями. В случае 3D данных линейное аппроксимирующее уравнение в области [х±Z0, y±Z0], представим в виде

где t0=Т(x, y) - время горизонта/годографа в точке с координатами (х0, у0),  и
и  - производные в этой точке (тангенсы углов наклона касательных) по соответствующим направлениям (Фиг. 1). В предлагаемом изобретении, участок горизонта/годографа, который может быть линейно аппроксимирован, назван площадкой горизонта/годографа.
- производные в этой точке (тангенсы углов наклона касательных) по соответствующим направлениям (Фиг. 1). В предлагаемом изобретении, участок горизонта/годографа, который может быть линейно аппроксимирован, назван площадкой горизонта/годографа.
Термин «площадка» иногда применяется для обозначения участка плоской наклонной границы при выводе аналитических уравнений годографов отраженных волн (отражающая площадка), преломленных волн (преломляющая площадка) и т.п. [1]. Отражающая или дифрагирующая площадка упоминается при интерпретации данных регулируемого направленного приема (РНП), для построения которых используются диаграммы лучей и времен [4].
Под общей задачей прослеживания волн необходимо понимать решение комплекса задач: обнаружение волны, ее идентификация и оценка параметров [3]. Решению этих задач для обработки 2D данных посвящено достаточно большое количество отечественных работ [5, 6]. Задачи прослеживания при интерпретации 3D данных появились сравнительно недавно и в основном освещаются в зарубежных источниках [7, 8].
В большинстве практических случаев анализируемое волновое поле представляет собой сложную интерференционную картину. Как правило, в этой ситуации простые методы прослеживания экстремумов волновой картины (в том числе - визуальные) дают результаты, далекие от истинных, т.к. интерференция волн может образовывать ложные максимумы и минимумы вплоть до полного взаимного погашения сигналов. Поэтому при решении подобных задач возникает вопрос корректности их решения, т.е. существования, единственности и устойчивости. Вопрос о существовании обычно не ставится, т.к. анализируемые волновые поля связаны с реальными геологическими объектами. Однозначность решения может быть достигнута только тогда, когда применяемые методы обладают заведомо достаточной разрешающей способностью, а результаты прослеживания могут быть подтверждены априорными или апостериорными данными (по данным каротажа скважин). Наличие случайных помех, мешающих регулярных волн различной природы возникновения, зон вертикальных деформаций или выклинивания приводит к неустойчивости решения.
В современных программных комплексах интерпретации сейсмических данных (Shiumberger Petrel,  SeisWorks, IHS Kingdom, GridPoint Dynamics Geoplat Pro-S) прослеживание волн осуществляется либо визуально, т.е. вручную, либо с применением автоматических корреляционных алгоритмов, либо эти подходы используются совместно. Во всех этих случаях надежность прослеживания волн зависит от наличия ярко выраженных регулярных волн, в противном случае автоматические алгоритмы не работают, а качество ручного прослеживания определяется опытом и интуицией интерпретатора, его способностью к критическому анализу разнообразных ситуаций, его представлению о геологической структуре исследуемого объекта.
SeisWorks, IHS Kingdom, GridPoint Dynamics Geoplat Pro-S) прослеживание волн осуществляется либо визуально, т.е. вручную, либо с применением автоматических корреляционных алгоритмов, либо эти подходы используются совместно. Во всех этих случаях надежность прослеживания волн зависит от наличия ярко выраженных регулярных волн, в противном случае автоматические алгоритмы не работают, а качество ручного прослеживания определяется опытом и интуицией интерпретатора, его способностью к критическому анализу разнообразных ситуаций, его представлению о геологической структуре исследуемого объекта.
Известен способ построения непрерывных сейсмостратиграфических моделей разрезов/кубов, патент RU 2516590, опубл. 20.05.2014 [9].
Согласно известному способу проводится попарное непрерывное сопоставление множества трасс сейсмического разреза или куба. Для каждой пары сейсмических трасс разреза или каждой пары трасс всех ин-лайнов и всех кросс-лайнов вычисляется двумерная функция взаимного различия фрагментов сейсмических записей трасс. Значения этой функции вычисляются для всех возможных сочетаний времени (глубины) данной пары трасс, которые могут принадлежать одному сейсмостратиграфическому уровню. Вычисляют функции оптимального соответствия времени/глубины от i-той к i+k-той сейсмической трассе  и
и  а затем вычисляют функции перехода для временной или глубинной области всех соседних сейсмических трасс. Данные функции перехода позволяют создать единую непрерывную двумерную для разреза и трехмерную для куба сейсмостратиграфическую модель. Технический результат - повышение точности и достоверности данных картирования горизонтов и восстановления параметров геологической среды.
а затем вычисляют функции перехода для временной или глубинной области всех соседних сейсмических трасс. Данные функции перехода позволяют создать единую непрерывную двумерную для разреза и трехмерную для куба сейсмостратиграфическую модель. Технический результат - повышение точности и достоверности данных картирования горизонтов и восстановления параметров геологической среды.
К недостаткам известного изобретения можно отнести отсутствие в нем этапов разрешения сейсмических волн, что в условиях интерференции ставит под сомнение надежность результатов прослеживания и говорит о невозможности применения при обработке сейсмограмм методов ОГТ и ВСП.
Известен способ автоматического выделения горизонтов из трехмерного массива сигналов сейсмических данных, способ автоматического выбора горизонтов подповерхностных образований из трехмерного массива сигналов сейсмических данных и компьютеризованный способ автоматического выделения горизонтов пластов из трехмерного массива сигналов сейсмических данных, патент RU 2107931, опубл. 27.03.1998 [10], который является наиболее близким аналогом (прототипом) к представленному в предлагаемом изобретении способу автоматического прослеживания горизонтов/годографов. В нем описывается способ, состоящий из двух фаз: пакетной и интерактивной. На первой пакетной фазе из исходного куба получают битовый массив, «единицы» которого означают возможное присутствие горизонта, а «нули» - отсутствие. При этом присутствие горизонта на каждой трассе определяется по определенной характеристике этой трассы, подтвержденной наличием такой же характеристики на ближайших четырех трассах в пределах узкого временного окна. На второй интерактивной фазе начиная с заданной пользователем начальной точки трехмерного массива, осуществляется поиск в битовом массиве ближайших «единиц».
К недостаткам этого алгоритма можно отнести:
- В основе прослеживания лежат критерии оценки положения горизонта по исходной интерференционной волновой картине, что существенно снижает эффективность алгоритма в сложных интерференционных условиях.
- Горизонты прослеживаются по отдельности и независимо, т.е. без учета возможных взаимных вариантов расположения.
- Существенная некорректность результатов прослеживания в зонах тектонических деформаций, выклиниваний и низкого отношения сигнала к шуму.
- Предназначены только для интерпретации трехмерных сейсмических кубов, и не могут быть адаптированы для обработки полевых сейсмограмм.
Известен способ обработки сейсмического сигнала и разведки месторождений, патент RU 2144683, опубл. 20.01.2000 [11], который является наиболее близким аналогом (прототипом) к представленному в предлагаемом изобретении способу автоматического выявления зон тектонических деформаций и зон трещиноватости. В нем описывается способ, базирующийся на вычислении функции взаимной корреляции близлежащих трасс сейсмического куба и определении по ним вектора «падения» в качестве оценки когерентности. В последующем за этим патентом техническом решении, описанным в патенте RU 2169931, опубл, 27.06.2001 [12] того же заявителя, не меняя принципа изобретения патента RU 2144683 вместо функции взаимной корреляции использованы коэффициенты подобия. В литературных источниках приводятся способы, в которых использованы собственные значения корреляционной матрицы, локальная структурная энтропия, ошибка предсказания амплитуд [13]. Данные алгоритмы получили широкое применение и используются при прогнозе зон тектонических деформаций. Отмечается, что наибольшую эффективность эти методы приобретают при использовании результатов прослеживания (учет наклона горизонтов). Однако в этом случае большое влияние на оценку когерентности оказывает качество прослеживания волн: ошибки интерпретатора вносят существенный вклад в картину когерентности.
В предлагаемом изобретении описывается принцип вычисления когерентности, в котором угол наклона площадок горизонтов используется не как дополнительный, а основной параметр. В итоге процесс вычисления когерентности не требует привлечения результатов прослеживания, таким образом, не зависит от «субъективного» анализа интерпретатора, и может проводиться по всему объему исходных данных.
Технической проблемой предлагаемого изобретения является разработка трех независимых технических решений, связанных единым изобретательским замыслом, а именно разработка способа формирования куба или разреза площадок на основе массива исходных сейсмических данных. А затем на основе данных куба или разреза площадок, в том числе полученных по предлагаемому способу формирования куба или разреза площадок, разработаны: способ автоматического прослеживания горизонтов/годографов и способ автоматического выявления зон тектонических деформаций и зон трещиноватости.
Техническим результатом предлагаемого изобретения является повышение точности, достоверности и автоматизации процессов (или методов) формирования куба или разреза площадок, прослеживания горизонтов/годографов и выявления зон тектонических деформаций и зон трещиноватости.
Дополнительным техническим результатом для способа формирования куба или разреза площадок и способа автоматического выделения горизонтов/годографов являются реализация (осуществление) указанных способов в условиях интерференции волн.
Дополнительным техническим результатом для способа автоматического выявления зон тектонических деформаций и зон трещиноватости является независимость процесса вычисления от «субъективного» анализа интерпретатора.
Указанный технический результат достигается тем, что способ формирования куба или разреза площадок на основе массива исходных сейсмических данных включает оценку параметров сейсмических волн по каждой трассе как кинематических, таких как параметры площадок (x0, y0, t0, α, β), так и динамических параметров волн (например, форма S(t), амплитуда А, энергия Е, фаза ϕ), при этом он включает следующие операции для каждой трассы сейсмической записи: направленное суммирование, по меньшей мере, двух ближайших трасс в заданном диапазоне углов наклона горизонта/годографа для получения трехмерного или двумерного результата сканирования (куб или разрез сканирования), поиск локальных экстремумов в результатах сканирования, уточнение положения каждого экстремума, определение побочного эффекта суммирования и формирование куба или разреза площадок согласно положению найденных экстремумов.
При этом способе проводят направленное суммирование, по меньшей мере, двух трасс, расположенных вблизи оцениваемой точки (х0, y0):

где Yвх(t, x, y) - исходные сейсмические данные, w(n, m) - весовые коэффициенты суммирования, Δх и Δу - расстояния между ближайшими трассами по координатам, R(t, p, q) - результат сканирования (куб или разрез сканирования).
При этом способе проводят направленное суммирование, по меньшей мере, двух трасс, расположенных вблизи оцениваемой точки (x0, y0) через одномерное преобразование Фурье трасс, суммирование спектров трасс с весами  , и обратное преобразование Фурье спектра суммы.
, и обратное преобразование Фурье спектра суммы.
При этом способе уточнение положения каждого экстремума результата сканирования проводят как

где Ri, j, k = R(ti, pj, qk).
При этом способе определение площадок, образованных за счет побочного эффекта суммирования проводят по условию:

где (pс, qс) - параметры площадок волн, ƒ0 - несущая частота волны, (р, q) - параметры проверяемых площадок, N×M - количество трасс, участвующих в суммировании, Δх и Δу - расстояния между ближайшими трассами по координатам.
При этом способе в качестве массива исходных данных используют глубинные кубы или разрезы и направленное суммирование проводят в заданном диапазоне углов наклона отражающих границ.
Указанный технический результат также достигается тем, что по способу автоматического прослеживания горизонтов/годографов по разрезу или кубу площадок, в том числе полученных по заявляемому способу формирования куба или разреза площадок, горизонт формируют из множества площадок, являющихся кусочно-линейной аппроксимацией поверхности, гладкой или имеющей конечное число разрывов, по которой можно провести непрерывную гладкую кривую, а в качестве критерия объединения, по меньшей мере, двух площадок в горизонт используют условия взаимной согласованности площадок.
При этом способе в условии взаимной согласованности площадок в качестве меры рассогласования двух площадок используют сумму абсолютных ошибок «предсказания»:

При этом способе в условии взаимной согласованности площадок в качестве меры рассогласования двух площадок используют среднее отклонение: средняя высота фигуры, ограниченной сверху и снизу площадками, в локальной области Ω

При этом способе в условии взаимной согласованности площадок в качестве меры рассогласования двух площадок используют эквивалент «интенсивности» ошибок в локальной области Ω

При этом способе в условии взаимной согласованности площадок в качестве меры рассогласования двух площадок используют среднеквадратическую ошибку в локальной области Ω

Указанный технический результат также достигается тем, что способ автоматического выявления зон тектонических деформаций и зон трещиноватости по кубу или разрезу площадок, в том числе полученных по заявляемому способу формирования куба или разреза площадок, заключается в обнаружении участков массива исходных сейсмических данных, в которых нарушено условие регулярности волн, при этом в качестве критерия нарушения условия регулярности волн используют меру рассогласования множества площадок.
При этом способе меру рассогласования множества площадок определяют как дисперсия углов в скользящем окне, ограниченном по пространству и времени:

где N - количество площадок, попавших в окно [x±Z0, y±Z0, t±T0], (рi, qi) - параметры этих площадок, wi - веса суммирования, 
При этом способе в качестве меры рассогласования множества площадок используют меру «максимума минимального рассогласования» (ММР).
При этом способе в качестве меры рассогласования множества площадок используют меру «суммы минимальных рассогласований» (СМР).
При этом способе в качестве меры рассогласования двух площадок используют сумму абсолютных ошибок «предсказания» по формуле (5).
При этом способе в качестве меры рассогласования двух площадок используют среднее отклонение: средняя высота фигуры, ограниченной сверху и снизу площадками, в локальной области Ω по формуле (6).
При этом способе в качестве меры рассогласования двух площадок используют эквивалент «интенсивности» ошибок в локальной области Ω по формуле (7).
При этом способе в качестве меры рассогласования двух площадок используют среднеквадратическую ошибку в локальной области Ω по формуле (8).
Раскрытие изобретения
В соответствии с настоящим изобретением предлагается, по крайней мере, три способа, которые позволяют решить перечисленные выше задачи в два этапа (Фиг. 3). На первом этапе осуществляется оценка параметров сейсмических волн по исходному массиву данных. Оценка производится на каждой трассе как кинематических, таких как параметры площадок (x0, y0, t0, α, β), так и динамических параметров волн (например, форма S(t), амплитуда А, энергия Е, фаза ϕ и т.п.). Множество всех полученных оценок (названное для 3D данных кубом площадок, для 2D данных - разрез площадок) формирует пространство признаков обнаружения горизонтов/годографов и выявления зон тектонических деформаций и зон трещиноватости (зон пониженной когерентности) (Фиг. 2). Полученные по предлагаемому способу формирования куба или разреза площадок, параметры площадок могут быть сохранены и использованы в последующем.
На втором этапе, используя только данные куба или разреза площадок, полученные в том числе и по предлагаемому способу, решаются задачи прослеживания горизонтов/годографов и выявления зон тектонических деформаций и зон трещиноватости (зон пониженной когерентности).
Для оценки параметров отражающих площадок для каждой трассы сейсмического поля предлагается применять схему Фиг. 4, основанную на сканировании (тангенсов) углов наклона (p, q) и направленном суммировании трасс, расположенных вблизи оцениваемой точки (x0, y0) по формуле (2). Положение локальных экстремумов R(t, p, q) принимается за оценку времени и тангенсов углов наклона площадок:

Направленное суммирование является одним из самых распространенных многоканальных методов, применяемых в условиях интерференции для решения задач оценки параметров волн [3, 14]. Свое развитие суммирование получило в методе регулируемого направленного приема в работе [4] и других. Основной принцип данного метода заложен в идеи наилучшего приема плоской волны - когда линия суммирования совпадает с годографом волны. Учитывая, что наклоны волн часто априори не известны, то суммирование производят с различными временными сдвигами в диапазоне возможных значений наклона годографов полезных волн. Такое суммирование называют регулируемым. В настоящий момент построено большое количество алгоритмов анализа и интерпретации многоканальных сейсмоданных, опирающихся на результаты проведения РНП (суммограммы, суммоленты). В сочетании с высокочастотной фильтрацией РНП стал эффективным средством обработки сложных волновых полей. С помощью анализа, так называемых, областей разрастания амплитуды на суммоленте РНП разработаны алгоритмы и программы решения задач обнаружения, выделения и оценки параметров плоских волн.
Так как метод был разработан в период с 1937 по 1954 года, его реализация была возможна только аналоговым способом. Для чего были разработаны специальные устройства направленного суммирования, основанные на оптическом суммировании трасс. К существенным недостаткам этой техники можно отнести аппаратную зависимость разрешающей способности метода, дискретность шага сдвига трасс по времени и, как у любой специализированной техники, ее не универсальность. Появившиеся последующие модификации метода РНП в основном носили характер адаптации метода к специфике конкретной задачи. Так в работах А.Б. Когана, В.Н. Деча, Л.Д. Кноринга и В.Н. Страхова [15] представлен метод направленного суммирования с одновременной частотной фильтрацией (НСЧФ) для выделения "вытянутых линейно по какой-либо фиксированной координате аномалеобразующих объектов" (данные магниторазведки, гравиразведки и т.п.) и автоматического построения корреляционных схем по данным каротажа. Как и РНП, НСЧФ вначале был реализован аналоговым способом, но в последних своих работах данные авторы приводят результаты цифровой обработки методом НСЧФ, не описывая сами методы реализации цифрового направленного суммирования, не анализируя эффективности данного подхода.
Большинство алгоритмов интерференционных систем накладывают условие целого значения коэффициента направленности системы (т.е. величина рΔх/Δt должна быть целым числом) [14]. В противном случае, необходимо применять интерполяционные вычисления, приводящие к значительному увеличению трудоемкости алгоритмов и требующих обоснованного выбора параметров интерполяции. Как отмечается в [16], реализация метода РНП в частотной области сталкивается с аналогичными проблемами: "…кажется, что просто получить Yвх(ƒt, -pƒt) по Yвx(ƒt, ƒx), но на практике это самая трудная часть процесса. Прямая ƒx=qƒt не проходит сразу через все сеточные узлы (за исключением случая р=Δt/Δх). Поэтому необходимо выполнить некоторый объем интерполяционных вычислений".
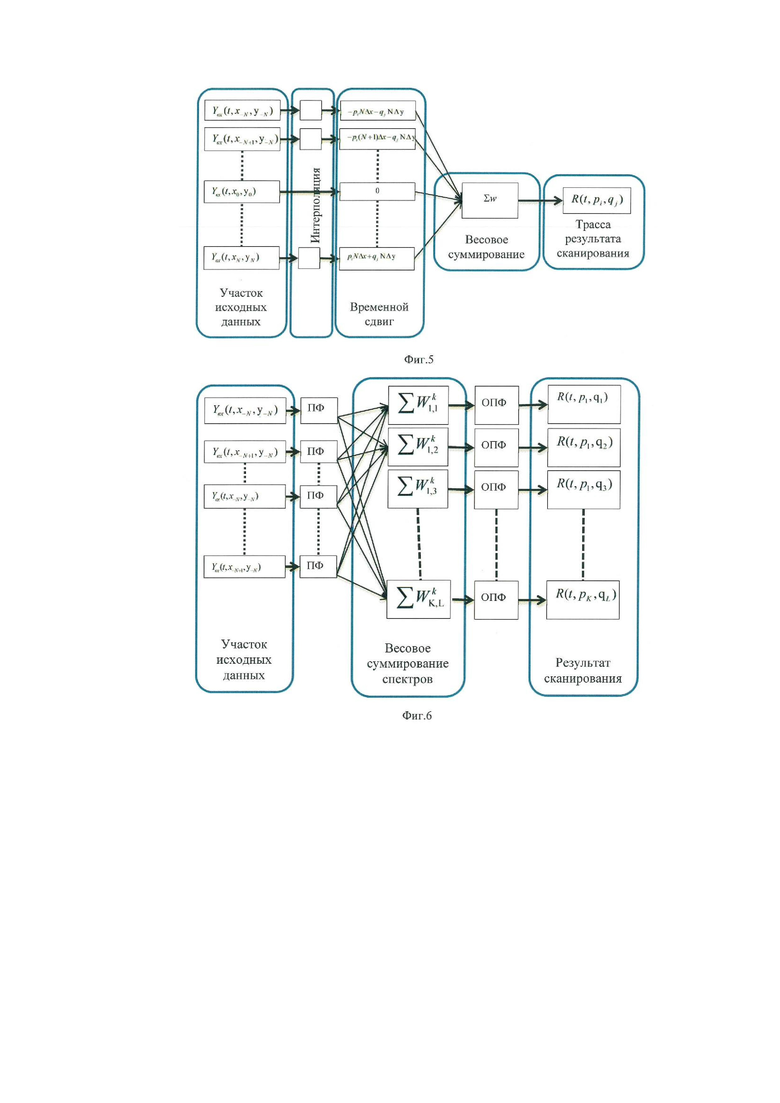
Если для получения результата сканирования использовать непосредственное суммирование трасс, учитывая дискретность по времени и, в общем случае, не кратность смещения pnΔx+qmΔy шагу дискретизации по времени Δt, то каждую трассу необходимо будет проинтерполировать для каждого направления суммирования (Фиг. 5). Однако указанные выше проблемы можно решить с помощью подхода, изложенного в [17, 18]. Согласно этому подходу процедуру направленного суммирования можно организовать через одномерное преобразование Фурье трасс, суммирование спектров трасс с весами

и обратное преобразование Фурье спектра суммы (Фиг. 6). Очевидные преимущества такой схемы реализации:
- для всех результатов суммирования первый этап (преобразование Фурье) является общим и не зависящим от параметров суммирования, а, следовательно, может быть выполнен один раз для всех кубов сканирования, в формировании которых участвует данная трасса;
- преобразование Фурье реализует наилучшую интерполяцию сейсмических сигналов - интерполяцию Котельникова;
- при суммировании спектров трасс можно суммировать не весь диапазон частот (до частоты Найквиста), а только диапазон частот сигнала (как правило, в два раза меньший частоты Найквиста), что сократит время работы алгоритма и повысит разрешающую способность алгоритма;
- для ускорения вместо ПФ можно использовать алгоритмы быстрого ПФ (алгоритмы Кули-Тьюки, Винограда и т.п.).
- В случае, если требуется прослеживать такую особенность формы волны как переход через ноль, в спектральную процедуру суммирования достаточно добавить умножение спектра суммы на мнимую единицу и частоту. Теперь экстремумы результатов сканирования будут соответствовать этим особенностям
Оценку динамических параметров волн можно осуществлять известными методами по исходному волновому полю, однако, для увеличения разрешающей способности предпочтительно это делать по результатам суммирования. К таким параметрам можно отнести форму, амплитуду, преобладающую частоту, энергию, фазу и т.п. К обязательным параметрам для задачи прослеживания следует отнести индикаторный параметр, определяющий эту особенность (максимум, минимум, переход через ноль от минуса к плюсу или переход через ноль от плюса к минусу и т.п.).
Уточнение положения каждого экстремума можно проводить со сколь угодно малой погрешностью, привлекая методы многомерной безусловной оптимизации: градиентный метод, метод наискорейшего спуска, метод сопряженных направлений и т.п. Однако такие методы требуют проведения дополнительных вычислений направленного суммирования, что плохо скажется на быстродействии алгоритма. Грубую оценку положения экстремумов, но с погрешностью, намного меньшей дискретности результата сканирования, предлагается получить путем линейной аппроксимации результатов сканирования, для которой уточненная оценка (10) примет вид по формуле (3).
Локальные экстремумы результатов направленного суммирования, как показали исследования, не всегда соответствуют коэффициентам уравнения горизонта/годографа регулярной волны. Ложные положения экстремумов связываются с нарушением условия регулярности волны или с побочным эффектом суммирования. Для различения второй ситуации необходимо знать параметры площадок волн (pc, qc) и частотный состав волн (несущую частоту - ƒ0). Параметры (p, q) площадок, образованных за счет побочного эффекта суммирования, будут удовлетворять условию по формуле (4). В качестве (pc, qc) можно выбрать параметры площадок с преобладающей по модулю амплитудой результата сканирования в скользящем временном окне. Другой подход в снижении побочного эффекта суммирования заключается, как известно в теории цифровой обработки сигналов, в использовании в качестве весовых коэффициентов суммирования w(n, m) т.н. сглаживающих окон: треугольное окно, окно Ханна, окно Хемминга и т.п.
Опираясь на полученные оценки параметров волн (куб или разрез площадок), способ автоматического прослеживания горизонтов/годографов заключается в обнаружении множества площадок, являющихся кусочно-линейной аппроксимацией поверхности, гладкой или имеющей конечное число разрывов, но по которой можно провести гладкую кривую. Для решения в такой постановке необходим критерий объединения хотя бы двух площадок с уравнениями τ1(х, у) и τ2(х, у) в один горизонт.
В качестве такого критерия может выступать условие ограничения некоторой меры рассогласования двух площадок, определяемые по формулам (5-8):
- Сумма абсолютных ошибок «предсказания» (Фиг. 7).
- Среднее отклонение: средняя высота фигуры (Фиг. 8), ограниченной сверху и снизу площадками, в локальной области Ω.
- Эквивалент «интенсивности» ошибок в локальной области Ω.
- Среднеквадратическая ошибка в локальной области Ω.
Последняя мера является предпочтительной для 3D данных, т.к. учитывает расхождение во всех направлениях и определена в размерности времени. Для анализа 2D данных достаточно суммы абсолютных ошибок «предсказания».
На основе этих мер введем условие взаимной согласованности двух площадок (Фиг. 9):
- имеют одинаковый индикатор особенности волны,
- площадка №1 обладает наименьшей мерой рассогласования с площадкой №2 из всех площадок трассы №2, не превышающей заданный порог,
- площадка №2 обладает наименьшей мерой рассогласования с площадкой №1 из всех площадок трассы №1.
Условие взаимной согласованности трех площадок:
- имеют одинаковый индикатор особенности волны,
- площадка №1 взаимно согласована с площадкой №2,
- площадка №1 взаимно согласована с площадкой №3,
- площадка №2 взаимно согласована с площадкой №3.
Далее по аналогии эти условия можно распространить на случай взаимной согласованности четырех, пяти и т.д. площадок.
Предлагается базовый алгоритм автоматического прослеживания одного горизонта по выбранному пользователем начальному множеству площадок, который включает в себя следующие этапы:
1. Определение пользователем начального множества площадок {(xi, yi, ti, αi, βi, Ai, Si, …)}, обладающих одинаковым индикатором особенности волны. Включение этих площадок в горизонт.
2. Определение трасс, близлежащих к трассам, где горизонт определен, и поиск на них площадок, отвечающих требованию взаимной согласованности, по меньшей мере, с одной площадкой горизонта.
3. Выбор площадки из найденных в п. 2 площадок, обладающей минимальной мерой рассогласования (Фиг. 10). В случае если такая площадка находится - включение этой площадки в горизонт, иначе - остановка алгоритма.
4. Повторение п. 2-3 до остановки алгоритма или отсутствия непроверенных трасс.
Усовершенствование данного алгоритма может производиться по пути ограничения области поиска площадок относительно начального множества или в заданных пределах координат, номеров трасс и времени, ограничения на количество согласований включаемой в горизонт площадки, введения дополнительных мер рассогласования площадок по динамическим характеристикам, исключения повторных вычислений и исключения из анализа площадок, образованных за счет побочного эффекта суммирования (Фиг. 11).
Предлагается базовый алгоритм автоматического прослеживания всех возможных горизонтов (Фиг. 12):
1. Произвольно или по указанию пользователя выбирается начальная трасса прослеживания. Каждая площадка начальной трассы, имеющая взаимную согласованность, по меньшей мере, с одной площадкой ближайшей трассы, образует новый горизонт.
2. Произвольно или по правилу, указанному пользователем, выбирается трасса, ближайшая к уже проанализированным. Все площадки этой трассы проверяются на взаимную согласованность с ближайшими площадками горизонтов. Если площадка трассы взаимно согласована, по меньшей мере, с одной площадкой горизонта, она включается в этот горизонт. Если площадка трассы имеет взаимную согласованность, по меньшей мере, с одной площадкой ближайшей трассы, но не включена ни в один горизонт, она образует новый горизонт.
3. Пункт 2 повторяется до тех пор, пока не будет проведен анализ всех трасс.
Усовершенствование данного алгоритма может производиться по пути введения дополнительных мер рассогласования двух площадок по динамическим характеристикам, добавления анализа прослеженных горизонтов на возможное объединение или удаление, исключения повторных вычислений и исключения из анализа площадок, образованных за счет побочного эффекта суммирования.
В противоположность способу автоматического прослеживания горизонтов/годографов, способ автоматического выявления зон тектонических деформаций и зон трещиноватости основан на определении участков сейсмического поля, в которых нарушаются условия регулярности волны (т.е. наблюдается пониженная когерентность колебаний): резкое латеральное изменение в общем случае формы волны. Соответственно, в кубе или разрезе площадок такие зоны будут характеризоваться наличием площадок, «слабо» согласованных с близлежащими, и «ложных» площадок, которые не характеризуют отражающие свойства среды, а являются результатом побочного эффекта суммирования нерегулярных волн. Для выделения мест расположения таких площадок введем в качестве оценки степени когерентности следующие меры рассогласования множества площадок:
- Дисперсия углов (статистическая мера)
Статистическая характеристика, рассчитываемая в скользящем окне, ограниченном по пространству и времени по формуле (9).
- Мера «максимум минимального рассогласования»
Мера максимума минимального рассогласования (ММР) определяется согласно следующему алгоритму:
1) для конкретной трассы с координатами (х0, y0) последовательно выбираются все площадки трассы,
2) для каждой площадки п. 1 ищутся площадки с соседних трасс, обладающие минимальной мерой рассогласования двух площадок (Фиг. 9а),
3) среди найденных площадок в п. 2 выбирается площадка с максимальной мерой рассогласования двух площадок (Фиг. 13б),
4) значение этой меры определяет значение куба/разреза когерентности в точке (x0, y0, t0) и ее временной окрестности [t0-W, t0+W], если в этой окрестности не определено значение, большее по величине (Фиг. 13а, в).
- Мера «сумма минимальных рассогласований»
Мера суммы минимального рассогласования (СМР) определяется согласно следующему алгоритму:
1) для конкретной трассы с координатами (х0, y0) последовательно выбираются все площадки трассы,
2) для каждой площадки п. 1 ищутся площадки с соседних трасс, обладающие минимальной мерой рассогласования двух площадок (Фиг. 9а),
3) среди найденных площадок в п. 2 выбирается площадка с максимальной мерой рассогласования двух площадок (Фиг. 14б),
4) значение этой меры добавляется в значение куба/разреза когерентности в точке (x0, y0, t0) и ее временной окрестности [t0-W, t0+W] (Фиг. 14а, в).
В отличие от известных, предлагаемые меры имеют низкие значения в зонах высокой когерентности (регулярности) волн.
Не смотря на то, что настоящее изобретение может быть осуществлено в различных вариантах, следует иметь в виду, что вышеуказанное описание следует рассматривать только как пример осуществления принципов изобретения, который ни в коей мере не ограничивает изобретение описанными специфическими алгоритмами и примерами их осуществления.
Изобретение иллюстрируется следующими фигурами.
На фиг. 1 представлено графическое изображение площадки в трехмерном пространстве.
На фиг. 2 представлено графическое изображение куба площадок.
На фиг. 3 представлена общая схема решения задач прослеживания горизонтов/годографов и оценки когерентности с помощью куба площадок.
На фиг. 4 представлена общая схема оценки кинематических параметров площадок на одной трассе.
На фиг. 5 представлена схема получения одной трассы результата сканирования с помощью направленного суммирования трасс.
На фиг. 6 представлена схема вычисления результатов сканирования с помощью преобразования Фурье.
На фиг. 7 представлено графическое пояснение к понятию абсолютных ошибок «предсказания» положения площадок.
На фиг. 8 представлена фигура, сверху и снизу ограниченная уравнениями двух площадок.
На фиг. 9 представлено изображение трасс площадок и выделены площадки, соответствующие (а, б) и не соответствующие (а, в) требованию взаимной согласованности двух площадок.
На фиг. 10 представлены графическое пояснение принятия решения о включении площадки в горизонт/годограф в задаче прослеживания горизонта/годографа (проекция на горизонтальную плоскость).
На фиг. 11 представлена общая схема алгоритма автоматического прослеживания одного горизонта/годографа.
На фиг. 12 представлена общая схема алгоритма автоматического прослеживания всех возможных горизонтов/годографов.
На фиг. 13 представлен процесс формирования трассы куба когерентности согласно мере ММР. Трасса куба когерентности (а), анализ мер рассогласования с ближайшими трассами (б), изменение трассы куба когерентности (в).
На фиг. 14 представлен процесс формирования трассы куба когерентности согласно мере СМР. Трасса куба когерентности (а), анализ мер рассогласования с ближайшими трассами (б), изменение трассы куба когерентности (в).
Примеры осуществления изобретения по реальным материалам приведены на фиг. 15-18.
Все представленные результаты были вычислены с помощью одного компьютера на базе процессора Intel Core i7. При обработке 2D данных время вычисления разрезов площадок не превышало нескольких минут, а процессы прослеживания всех возможных горизонтов/годографов и вычисления разрезов когерентности длились не более минуты. Вычисление куба площадок при размере исходного сейсмического куба 352 инлайна на 640 кросслайнов и 3000 отсчетов трасс заняло 2 часа, прослеживание каждого горизонта длилось несколько минут.
На фиг. 15 представлен пример интерпретации временного разреза 2D МОГТ. Исходный сейсмический разрез (а), разрез площадок (б), результат работы алгоритма автоматического выделения всех горизонтов (в) и разрез когерентности согласно мере «дисперсия углов» (г).
На фиг. 16 представлен пример прослеживания волн по материалам ВСП, полученных в одной из скважин Западной Сибири. Сейсмограммы ВСП: Z-компонента ближнего пункта взрыва (а), R-компонента удаленного пункта взрыва (г); результат работы алгоритма автоматического выделения всех годографов в диапазоне углов падающих волн (б), в диапазоне углов отраженных продольных волн (в, е) и в диапазоне углов падающих обменных волн (д).
На фиг. 17 представлен пример прослеживания горизонтов по временному сейсмическому кубу 3D МОГТ. План сейсмического куба 3D МОГТ и положение среза кубов (а), срез куба площадок (б), определение пользователем множества начальных площадок по срезу сейсмического куба и куба площадок (в), срез сейсмического куба и горизонты, полученные алгоритмом автоматического прослеживания одного горизонта (г), результаты работы алгоритма автоматического прослеживания горизонта №1 (д), горизонта №2 (е), горизонта №3 (ж), горизонта №4 (з), горизонта №5 (и), изображение прослеженных горизонтов в трехмерном пространстве (к). В алгоритмах автоматического прослеживания горизонта задавалась небольшая группа (до 10) начальных площадок, лежащих на одном срезе.
На фиг. 18 представлен пример результатов расчета кубов когерентности по временному сейсмическому кубу 3D МОГТ одного из месторождений углеводородов Западной Сибири. Сейсмический куб 3D МОГТ (а), кубы когерентности по мерам: дисперсии углов (б), ММР (в), СМР (г).
Источники информации
1. Боганик Г.Н., Гурвич И.И. Сейсморазведка. Тверь: Издательство АИС, 2006, стр. 744.
2. Сивухин Д.В. Общий курс физики. Москва: Физматлит, 2005. Т.IV. Оптика.
3. Гурвич И.И., Номоконова В.П., [ред.]. Сейсморазведка. Справочник геофизика. Москва: Недра, 1981, стр. 464.
4. Рябинкин Л.А. Теория упругих волн. Учебное пособие для вузов. Москва: Недра, 1987, стр. 182.
5. Гольцман Ф.М., Лимбах Ю.И., Пахомов А.А. Статистический алгоритм прослеживания волн по их амплитудам и временам вступления. Вопросы динамической теории распространения сейсмических волн. Ленинград: Наука, 1975, стр. 195-201.
6. Пузырев Н.Н. Общие вопросы корреляции сейсмических волн. Дискретная корреляция сейсмических волн. Новосибирск: Наука, 1971, стр. 5-13.
7. International Conference on Acoustics, Speech, and Signal Processing, IEEE, 3. Harrigan E., и др. 1992. Seismic horizon picking using an artificial neural network, стр. 105-108.
8. Seismic horizon detection using image processing algorithms. Bondar I. 1992 г., Geophys Prospect, T. 40, стр. 785-800.
9. Патент RU 2516590, опубл. 20.05.2014 г.
10. Патент RU 2107931, опубл. 27.03.1998 г.
11. Патент RU 2144683, опубл. 20.01.2000 г.
12. Патент RU 2169931, опубл, 27.06.2001 г.
13. Вычисление кубов когерентности и сингулярности. Шленкин С.И., и др., 2012 г., Технологии сейсморазведки, т. 2, стр. 5-11.
14. Гольдин С.В. 1974. Линейные преобразования сейсмических сигналов. Москва: Недра, 1974, стр. 352.
15. Деч В.Н., Коган А.Б. Пространственная фильтрация - универсальный метод корреляции геофизических данных. 1993 г., Физика Земли, т. 2, стр. 29-39.
16. Клаербоут Дж.Ф. Теоретические основы геофизической информации. С приложениями к разведке нефти. Москва: Наука, 1981, стр. 304.
17. Степанов Д.Ю. Алгоритмическое и программное обеспечение обработки сейсмической информации на основе методов фильтрации по направлению: диссертация на соискание степени кандидата технических наук. Томск, 2000, стр. 201.
18. Степанов Д.Ю., Яппарова Е.А. Новый подход к реализации направленных фильтров при анализе сложных волновых полей // Технологии сейсморазведки, 2005, №1, с. 32-37.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАБОТКИ СЕЙСМИЧЕСКОЙ ИНФОРМАЦИИ ПО ДАННЫМ ОДНОКРАТНОГО ПРОСЛЕЖИВАНИЯ | 1972 |
|
SU342155A1 |
| Способ определения границ трещиноватой зоны | 2022 |
|
RU2789759C1 |
| УСТОЙЧИВЫЙ МЕТОД ПОСТРОЕНИЯ ГЛУБИННЫХ ИЗОБРАЖЕНИЙ В СЕЙСМОРАЗВЕДКЕ НА ОСНОВАНИИ НАСТРОЙКИ ОПЕРАТОРА ПО ЭТАЛОННЫМ СЕЙСМОГРАММАМ | 2014 |
|
RU2577792C1 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ И ОБРАБОТКИ ДАННЫХ | 2000 |
|
RU2165630C1 |
| АВТОМАТИЧЕСКОЕ ВЫДЕЛЕНИЕ ПОВЕРХНОСТЕЙ ДЛЯ ПОСТРОЕНИЯ ГЕОЛОГО-ГИДРОДИНАМИЧЕСКОЙ МОДЕЛИ НЕФТЕГАЗОВОГО МЕСТОРОЖДЕНИЯ ПО СЕЙСМИЧЕСКИМ ДАННЫМ | 2012 |
|
RU2515081C1 |
| СПОСОБ ПОСТРОЕНИЯ НЕПРЕРЫВНЫХ СЕЙСМОСТРАТИГРАФИЧЕСКИХ МОДЕЛЕЙ РАЗРЕЗОВ/КУБОВ | 2012 |
|
RU2516590C1 |
| Способ сейсмической разведки | 1989 |
|
SU1689900A1 |
| КОМПЛЕКСНЫЙ АНАЛИЗ КИНЕМАТИКИ ДЛЯ НЕГИПЕРБОЛИЧЕСКОЙ КИНЕМАТИЧЕСКОЙ КОРРЕКЦИИ | 2008 |
|
RU2458364C2 |
| СПОСОБ ПРОГНОЗА ЗОН ПОГЛОЩЕНИЙ БУРОВОГО РАСТВОРА ПРИ БУРЕНИИ СКВАЖИН НА ОСНОВЕ ТРЕХМЕРНОЙ ГЕОМЕХАНИЧЕСКОЙ МОДЕЛИ И ТЕКТОНИЧЕСКОЙ МОДЕЛИ МЕСТОРОЖДЕНИЯ | 2018 |
|
RU2719792C2 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ ДЛЯ ИЗУЧЕНИЯ ОСАДОЧНОГО ЧЕХЛА ПРИ НАЛИЧИИ СИЛЬНО ИЗРЕЗАННЫХ АКУСТИЧЕСКИ ЖЕСТКИХ ГРАНИЦ (ВАРИАНТЫ) | 2003 |
|
RU2221262C1 |











Изобретение относится к обработке сейсмических данных в области геофизики и может быть использовано при проведении сейсморазведочных работ. Предложены три способа, связанные единым изобретательским замыслом. Способ формирования куба или разреза площадок на основе массива исходных сейсмических данных включает оценку параметров сейсмических волн по каждой трассе как кинематических, так и динамических параметров волн, при этом он включает следующие операции для каждой трассы сейсмической записи: направленное суммирование, по меньшей мере, двух ближайших трасс в заданном диапазоне углов наклона горизонта/годографа для получения трехмерного или двумерного результата сканирования (куб или разрез сканирования), поиск локальных экстремумов в результатах сканирования, уточнение положения каждого экстремума, определение «побочных» результатов и формирование куба или разреза площадок согласно положению найденных экстремумов. Способ автоматического прослеживания горизонтов/годографов по разрезу или кубу площадок, в том числе полученных по заявляемому способу формирования куба или разреза площадок, в котором горизонт формируют из множества площадок, являющихся кусочно-линейной аппроксимацией поверхности, гладкой или имеющей конечное число разрывов, по которой можно провести непрерывную гладкую кривую, а в качестве критерия объединения, по меньшей мере, двух площадок в горизонт используют условия взаимной согласованности площадок. Способ автоматического выявления зон тектонических деформаций и зон трещиноватости по кубу или разрезу площадок, в том числе полученных по заявляемому способу формирования куба или разреза площадок, заключается в обнаружении участков массива исходных сейсмических данных, в которых нарушено условие регулярности волн, при этом в качестве критерия нарушения условия регулярности волн используют меру рассогласования множества площадок. Технический результат - повышение точности, достоверности и автоматизации процессов формирования куба или разреза площадок, прослеживания горизонтов/годографов и выявления зон тектонических деформаций и зон трещиноватости. 3 н. и 16 з.п. ф-лы, 18 ил.
1. Способ формирования куба или разреза площадок на основе массива исходных сейсмических данных, включающий оценку параметров сейсмических волн по каждой трассе как кинематических, таких как параметры площадок (x0, y0, t0, α, β), так и динамических параметров волн (например, форма S(t), амплитуда А, энергия Е, фаза ϕ), отличающийся тем, что он включает следующие операции для каждой трассы сейсмической записи: направленное суммирование, по меньшей мере, двух ближайших трасс в заданном диапазоне углов наклона горизонта/годографа для получения трехмерного или двумерного результата сканирования (куб или разрез сканирования), поиск локальных экстремумов в результатах сканирования, уточнение положения каждого экстремума, определение побочного эффекта суммирования и формирование куба или разреза площадок согласно положению найденных экстремумов.
2. Способ по п. 1, отличающийся тем, что проводят направленное суммирование, по меньшей мере, двух трасс, расположенных вблизи оцениваемой точки (х0, у0):

где Yвx(t, x, y) - исходные сейсмические данные, w(n, m) - весовые коэффициенты суммирования, Δх и Δу - расстояния между ближайшими трассами по координатам, R(t, p, q) - результат сканирования (куб или разрез сканирования).
3. Способ по п. 1, отличающийся тем, что проводят направленное суммирование, по меньшей мере, двух трасс, расположенных вблизи оцениваемой точки (х0, у0) через одномерное преобразование Фурье трасс, суммирование спектров трасс с весами  , и обратное преобразование Фурье спектра суммы.
, и обратное преобразование Фурье спектра суммы.
4. Способ по п. 1, отличающийся тем, что уточнение положения каждого экстремума результата сканирования проводят как

где Ri, j, k = R(ti, pj, qk).
5. Способ по п. 1, отличающийся тем, что определение площадок, образованных за счет побочного эффекта суммирования, проводят по условию:

где (рс, qс) - параметры площадок волн, ƒ0 - несущая частота волны, (~р, ~q) - параметры проверяемых площадок, N×M - количество трасс, участвующих в суммировании, Δх и Δу - расстояния между ближайшими трассами по координатам.
6. Способ по п. 1, отличающийся тем, что в качестве массива исходных данных используют глубинные кубы или разрезы и направленное суммирование проводят в заданном диапазоне углов наклона отражающих границ.
7. Способ автоматического прослеживания горизонтов/годографов по разрезу или кубу площадок, в том числе полученных по способу 1, отличающийся тем, что горизонт формируют из множества площадок, являющихся кусочно-линейной аппроксимацией поверхности, гладкой или имеющей конечное число разрывов, по которой можно провести непрерывную гладкую кривую, а в качестве критерия объединения, по меньшей мере, двух площадок в горизонт используют условия взаимной согласованности площадок.
8. Способ по п. 7, отличающийся тем, что в условии взаимной согласованности площадок в качестве меры рассогласования двух площадок используют сумму абсолютных ошибок «предсказания»:
ε1=|t1-τ2(x1, y1)|+|t2-τ1(x2, y2)|.
9. Способ по п. 7, отличающийся тем, что в условии взаимной согласованности площадок в качестве меры рассогласования двух площадок используют среднее отклонение: средняя высота фигуры, ограниченной сверху и снизу площадками, в локальной области Ω ε2= 1/|Ώ| ∫∫Ώ |τ1(x1, y1) - τ2(x2, y2)| dydx.
10. Способ по п. 7, отличающийся тем, что в условии взаимной согласованности площадок в качестве меры рассогласования двух площадок используют эквивалент «интенсивности» ошибок в локальной области Ω ε3= ∫x∫ y [τ1(x1, y1)-τ2(x2, y2)]2 dydx.
11. Способ по п. 7, отличающийся тем, что в условии взаимной согласованности площадок в качестве меры рассогласования двух площадок используют среднеквадратическую ошибку в локальной области Ω 
12. Способ автоматического выявления зон тектонических деформаций и зон трещиноватости по кубу или разрезу площадок, в том числе полученных по способу 1, заключающийся в обнаружении участков массива исходных сейсмических данных, в которых нарушены условие регулярности волн, отличающийся тем, что в качестве критерия нарушения условия регулярности волн используют меру рассогласования множества площадок.
13. Способ по п. 12, отличающийся тем, что меру рассогласования множества площадок определяют как дисперсию углов в скользящем окне, ограниченном по пространству и времени:

где N - количество площадок, попавших в окно [x±Z0, y±Z0, t±T0], (pi, qi) - параметры этих площадок, wi - веса суммирования, 
14. Способ по п. 12, отличающийся тем, что в качестве меры рассогласования множества площадок используют меру «максимума минимального рассогласования» (ММР).
15. Способ по п. 12, отличающийся тем, что в качестве меры рассогласования множества площадок используют меру «суммы минимальных рассогласований» (СМР)
16. Способ по любому из пп. 14 или 15, отличающийся тем, что в качестве меры рассогласования двух площадок используют сумму абсолютных ошибок «предсказания»:

17. Способ по любому из пп. 14 или 15, отличающийся тем, что в качестве меры рассогласования двух площадок используют среднее отклонение: средняя высота фигуры, ограниченной сверху и снизу площадками, в локальной области Ω ε2= 1/|Ώ| ∫∫Ώ |τ1(x1, y1) - τ2(x2, y2)| dydx .
18. Способ по любому из пп. 14 или 15, отличающийся тем, что в качестве меры рассогласования двух площадок используют эквивалент «интенсивности» ошибок в локальной области Ω
ε3= ∫x∫ y [τ1(x1, y1)-τ2(x2, y2)]2 dydx..
19. Способ по любому из пп. 14 или 15, отличающийся тем, что в качестве меры рассогласования двух площадок используют среднеквадратическую ошибку в локальной области Ω 
| RU 2144683 C1, 20.01.2000 | |||
| US 5892732 A, 06.04.1999 | |||
| US 20100214870 A1, 26.08.2010 | |||
| СПОСОБ ПОСТРОЕНИЯ НЕПРЕРЫВНЫХ СЕЙСМОСТРАТИГРАФИЧЕСКИХ МОДЕЛЕЙ РАЗРЕЗОВ/КУБОВ | 2012 |
|
RU2516590C1 |
| WO 9301508 A1, 21.01.1993 | |||
| СПОСОБ ОБРАБОТКИ СЕЙСМИЧЕСКИХ ДАННЫХ | 2006 |
|
RU2324205C1 |
| US 20130151161 A1, 13.06.2013. | |||

