ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Настоящая заявка связана с нижеперечисленными заявками на патенты США, которые целиком включены в настоящую заявку путем отсылки:
MOTOR-DRIVEN SURGICAL CUTTING AND FASTENING INSTRUMENT WITH USER FEEDBACK SYSTEM
Изобретатели: Frederick E. Shelton, IV, John Ouwerkerk and Jerome R. Morgan (K&LNG 050519/END5687USNP)
MOTOR-DRIVEN SURGICAL CUTTING AND FASTENING INSTRUMENT WITH LOADING FORCE FEEDBACK
Изобретатели: Frederick E. Shelton, IV, John N. Ouwerkerk, Jerome R. Morgan, and Jeffrey S. Swayze (K&LNG 050516/END5692USNP)
MOTOR-DRIVEN SURGICAL CUTTING AND FASTENING INSTRUMENT WITH TACTILE POSITION FEEDBACK
Изобретатели: Frederick E. Shelton, IV, John N. Ouwerkerk, Jerome R. Morgan, and Jeffrey S. Swayze (K&LNG 050515/END5693USNP)
MOTOR-DRIVEN SURGICAL CUTTING AND FASTENING INSTRUMENT WITH ADAPTIVE USER FEEDBACK
Изобретатели: Frederick E. Shelton, IV, John N. Ouwerkerk, and Jerome R. Morgan (K&LNG 050513/END5694USNP)
MOTOR-DRIVEN SURGICAL CUTTING AND FASTENING INSTRUMENT WITH ARTICULATABLE END EFFECTOR
Изобретатели: Frederick E. Shelton, IV and Christoph L. Gillum (K&LNG 050692/END5769USNP)
MOTOR-DRIVEN SURGICAL CUTTING AND FASTENING INSTRUMENT WITH MECHANICAL CLOSURE SYSTEM
Изобретатели: Frederick E. Shelton, IV and Christoph L. Gillum (K&LNG 050693/END5770USNP)
SURGICAL CUTTING AND FASTENING INSTRUMENT WITH CLOSURE TRIGGER LOCKING MECHANISM
Изобретатели: Frederick E. Shelton, IV and Kevin R. Doll (K&LNG 050694/END5771USNP)
GEARING SELECTOR FOR A POWERED SURGICAL CUTTING AND FASTENING STAPLING INSTRUMENT
Изобретатели: Frederick E. Shelton, IV, Jeffrey S. Swayze, Eugene L. Timperman (K&LNG 050697/END5772USNP)
SURGICAL INSTRUMENT HAVING RECORDING CAPABILITIES
Изобретатели: Frederick E. Shelton, IV, John N. Ouwerkerk, and Eugene L. Timperman (K&LNG 050698/END5773USNP)
SURGICAL INSTRUMENT HAVING A REMOVABLE BATTERY
Изобретатели: Frederick E. Shelton, IV, Kevin R. Doll, Jeffrey S. Swayze and Eugene Timperman (K&LNG 050699/END5774USNP)
ELECTRONIC LOCKOUTS AND SURGICAL INSTRUMENT INCLUDING SAME
Изобретатели: Jeffrey S. Swayze, Frederick E. Shelton, IV, Kevin R. Doll (K&LNG 050700/END5775USNP)
ELECTRO-MECHANICAL SURGICAL CUTTING AND FASTENING INSTRUMENT HAVING A ROTARY FIRING AND CLOSURE SYSTEM WITH PARALLEL CLOSURE AND ANVIL ALIGNMENT COMPONENTS
Изобретатели: Frederick E. Shelton, IV, Stephen J. Balek and Eugene L. Timperman (K&LNG 050702/END5777USNP)
DISPOSABLE STAPLE CARTRIDGE HAVING AN ANVIL WITH TISSUE LOCATOR FOR USE WITH A SURGICAL CUTTING AND FASTENING INSTRUMENT AND MODULAR END EFFECTOR SYSTEM THEREFOR
Изобретатели: Frederick E. Shelton, IV, Michael S. Cropper, Joshua M. Broehl, Ryan S. Crisp, Jamison J. Float, Eugene L. Timperman (K&LNG 050703/END5778USNP)
SURGICAL INSTRUMENT HAVING A FEEDBACK SYSTEM
Изобретатели: Frederick E. Shelton, IV, Jerome R. Morgan, Kevin R. Doll, Jeffrey S. Swayze and Eugene Timperman (K&LNG 050705/END5780USNP)
УРОВЕНЬ ТЕХНИКИ
Настоящее изобретение относится, в общем, к эндоскопическим хирургическим аппаратам и, в частности, к механизированным эндоскопическим хирургическим аппаратам.
Эндоскопическим хирургическим аппаратам часто отдают предпочтение перед традиционными открытыми хирургическими устройствами, поскольку при меньшем рассечении обычно меньше время послеоперационного восстановления и риск осложнений. Поэтому выполнены важные разработки в области эндоскопических хирургических аппаратов, которые пригодны для точного размещения дистального концевого эффектора в искомом операционном поле через канюлю или троакар.
Обычно, упомянутые эндоскопические хирургические аппараты содержат «концевой эффектор», узел рукоятки и удлиненный стержень, который продолжается между концевым эффектором и узлом рукоятки. Концевой эффектор является участком аппарата (например, эндоскопического режущего инструмента (типа endocutter), захвата, режущего приспособления, сшивающих скобками аппаратов, приспособления для наложения зажимов, устройства доступа, устройства для доставки лекарства генной терапии к месту действия и энергетического устройства, использующего ультразвук, высокую частоту (RF), лазер и т.д.), выполненным с возможностью взаимодействия с тканью множеством способов для получения искомого диагностического или терапевтического результата.
Концевой эффектор и стержневой участок выполнены с размером для введения через троакар в пациента. Удлиненный стержневой участок позволяет вводить концевой эффектор на заданную глубину, а также способствует некоторому повороту концевого эффектора для его установки внутри пациента. При продуманном размещении троакара и применении захватов, например, через другой троакар, часто достаточно упомянутого размаха позиционирования. Хирургические сшивающие скобками и отрезные аппараты, например, такие, которые описаны в патенте США №5,465,895, являются примерами эндоскопического хирургического аппарата, который успешно позиционирует концевой эффектор посредством введения и поворота.
В зависимости от характера операции, может потребоваться дополнительная регулировка положения концевого эффектора эндоскопического хирургического аппарата. В частности, часто желательно ориентировать концевой эффектор под углом относительно продольной оси стержня аппарата. Поперечное или неосевое перемещение концевого эффектора относительно стержня аппарата часто, по соглашению, называют «шарнирным поворотом». Такое шарнирно-поворотное позиционирование позволяет врачу удобнее зацеплять ткань в некоторых случаях, например, за органом. Кроме того, шарнирно-поворотное позиционирование обеспечивает преимущество размещения эндоскопа за концевым эффектором, без загораживания стержнем аппарата.
Способы шарнирного поворота хирургического сшивающего и отрезного аппарата имеют тенденцию к усложнению путем объединения управления шарнирным поворотом с управлением смыканием концевого эффектора для сжатия ткани и срабатыванием (например, прошивным/отрезным действием) концевого эффектора в стесненных условиях небольшого диаметра эндоскопического аппарата. Как правило, все три управляющих движения передаются по стержню в виде продольных поступательных перемещений. Например, в патенте США №5,673,840 содержится описание гармошкообразного шарнирно-поворотного механизма («гибкой шейки»), который шарнирно поворачивают избирательным отведением назад одного из двух соединительных штоков через стержень рабочего оборудования, при этом каждый шток соответственно смещен на противоположную от другого сторону от осевой линии стержня. Соединительные штоки приводятся в движение храповым механизмом через последовательность дискретных позиций.
Другой пример продольного управления шарнирно-поворотным механизмом дает патент США № 5,865,361, который содержит шарнирно-поворотное звено, смещенное от эксцентрикового шарнира так, что толкательное или тянущее продольное поступательное перемещение шарнирно-поворотного звена выполняет шарнирный поворот в соответствующую сторону. Аналогично, патент США № 5,797,537 содержит описание аналогичного штока, проходящего через стержень для выполнения шарнирного поворота. Еще одни отличающиеся примеры шарнирно-поворотных хирургических устройств для сшивания скобками приведены в патентах США №№ 6,250,532 и 6,644,532.
Хотя вышеописанные типы эндоскопических режущих инструментов, обладающих шарнирно-поворотными концевыми эффекторами, предоставляли хирургу возможность точно перемещать и устанавливать концевой эффектор внутри пациента, положение рукоятки эндоскопического режущего инструмента определялось положением участка стержня, который выступает наружу из троакара и который непосредственно прикреплен к рукоятке. Поэтому хирург не может перемещать рукоятку в более удобное положение. Данные схемы устройств могли приводить к расположению рукоятки аппарата в неудобном положении, что осложняло для хирурга удерживание и работу с устройством.
Следовательно, существует настоятельная потребность в эндоскопическом режущем инструменте, который имеет рукояточный участок, который можно избирательно устанавливать в более эргономически подходящие и удобные положения относительно участка эндоскопического режущего инструмента, проходящего через троакар в пациента.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В соответствии с одним общим аспектом, настоящее изобретение относится к хирургическому аппарату, который содержит концевой эффектор, выполненный с размером для введения через троакар. Хирургический аппарат содержит узел удлиненного стержня, который соединен с концевым эффектором. Узел удлиненного стержня имеет дистальный участок, который примыкает к концевому эффектору, для введения в троакар вместе с концевым эффектором, и проксимальный участок, который удален от дистального участка настолько, что проксимальный участок выступает из троакара, когда концевой эффектор и дистальный участок введены через троакар. Управляющая рукоятка присоединена с возможностью шарнирного поворота к проксимальному участку узла удлиненного стержня. Может быть предусмотрен узел фиксации для избирательной фиксации рукоятки в заданном положении относительно проксимального участка узла стержня.
В соответствии с другим общим аспектом, настоящее изобретение относится к хирургическому аппарату, который содержит концевой эффектор, который выполнен с размером для введения через троакар. Узел удлиненного стержня соединен с концевым эффектором и имеет дистальный участок, который примыкает к концевому эффектору, для введения в троакар вместе с концевым эффектором, и проксимальный участок, который удален от дистального участка настолько, что проксимальный участок выступает из троакара, когда концевой эффектор и дистальный участок введены через троакар. Хирургический аппарат дополнительно содержит средство для управления концевым эффектором, который присоединен с возможностью шарнирного поворота к проксимальному участку узла удлиненного стержня.
В соответствии с еще одним общим аспектом, настоящее изобретение относится к хирургическому аппарату, который содержит концевой эффектор, который выполнен с размером для введения через троакар. Хирургический аппарат дополнительно содержит управляющую рукоятку, которая служит опорой для установки в ней с возможностью функционирования, по меньшей мере, одного приводного электродвигателя. Проксимальный полый сегмент стержня, который содержит первый проксимальный конец, присоединенный с возможностью поворота к управляющей рукоятке для избирательного поворота вокруг оси удлиненного стержня. Проксимальный полый стержень имеет также первый дистальный конец. Хирургический аппарат дополнительно содержит дистальный полый сегмент стержня, который имеет второй дистальный концевой участок, который соединен с возможностью функционирования с концевым эффектором для его избирательного приведения в действие осевым перемещением вдоль оси удлиненного стержня. Дистальный полый сегмент стержня имеет второй проксимальный концевой участок, который выполнен с размером для выступания из троакара, когда концевой эффектор введен через троакар. Первая верхняя петля и первая нижняя петля выступают из первого дистального конца проксимального полого сегмента стержня на расстоянии одна от другой. Вторая верхняя петля и вторая нижняя петля выступают из второго проксимального конца дистального полого сегмента стержня на расстоянии одна от другой. Хирургический аппарат дополнительно содержит верхнее двухшарнирное соединительное звено, которое имеет размер для перекрывания расстояния между первой и второй верхними петлями. Верхнее двухшарнирное соединительное звено имеет первый верхний палец, соединенный с возможностью поворота с первой верхней петлей, и второй верхний шарнирный палец, соединенный с возможностью поворота со второй верхней петлей. Нижнее двухшарнирное соединительное звено, имеющее размер для перекрывания расстояния между первой и второй нижними петлями, имеет первый нижний палец, который соединен с возможностью поворота с первой нижней петлей, и второй нижний палец, который соединен с возможностью поворота со второй нижней петлей. Проксимальный несущий сегмент прикреплен к управляющей рукоятке и продолжается через проксимальный полый сегмент стержня так, что выступает из его первого дистального конца. Дистальный несущий сегмент продолжается через дистальный полый сегмент стержня и имеет проксимальный конец, который примыкает к дистальному концу проксимального несущего сегмента. Дистальный несущий сегмент имеет дистальный конец, который присоединен к концевому эффектору и закреплен в дистальном полом сегменте стержня так, что дистальный полый сегмент стержня можно избирательно аксиально перемещать относительно дистального несущего сегмента. Дистальный участок ведущего вала установлен с возможностью функционирования в дистальном несущем сегменте и соединен с ходовым валом в концевом эффекторе. Проксимальный участок ведущего вала соединен с возможностью функционирования с одним из приводных электродвигателей в управляющей рукоятке и установлен с возможностью функционирования в проксимальном несущем сегменте. Шарнирно-поворотное сочленение ведущего вала является соединением между дистальным участком ведущего вала и проксимальным участком ведущего вала, чтобы проксимальный участок ведущего вала мог шарнирно поворачиваться относительно дистального участка ведущего вала, когда управляющую рукоятку шарнирно поворачивают относительно дистального сегмента стержня.
ЧЕРТЕЖИ
В настоящей заявке представлены для примера описания различных вариантов осуществления в сочетании со следующими фигурами, на которых одинаковые позиции применяются для обозначения одинаковых частей и на которых:
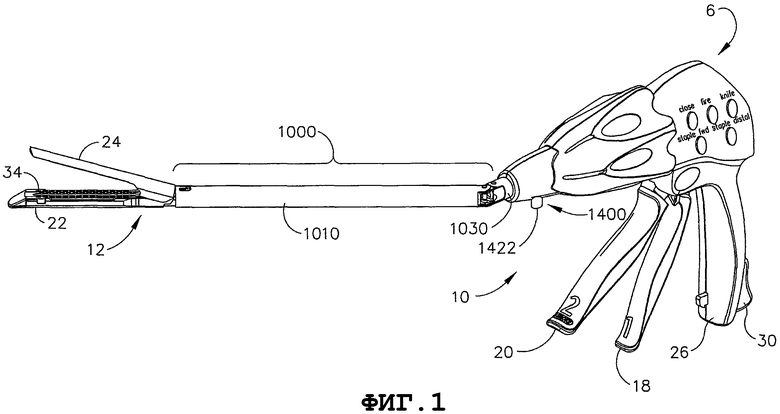
Фигура 1 - вид в перспективе варианта осуществления хирургического аппарата в соответствии с настоящим изобретением;
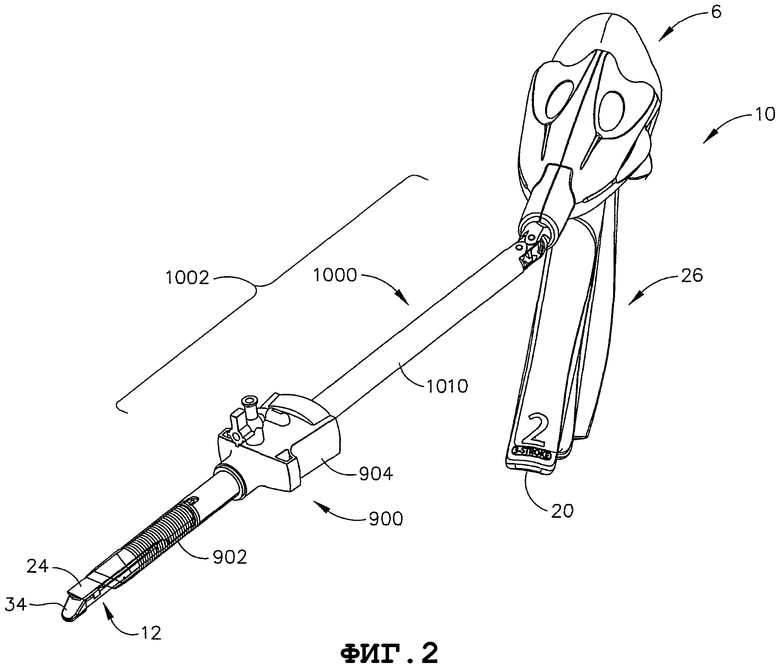
Фигура 2 - еще один вид в перспективе хирургического аппарата, показанного на фигуре 1, с концевым эффектором данного аппарата, введенным в троакар;
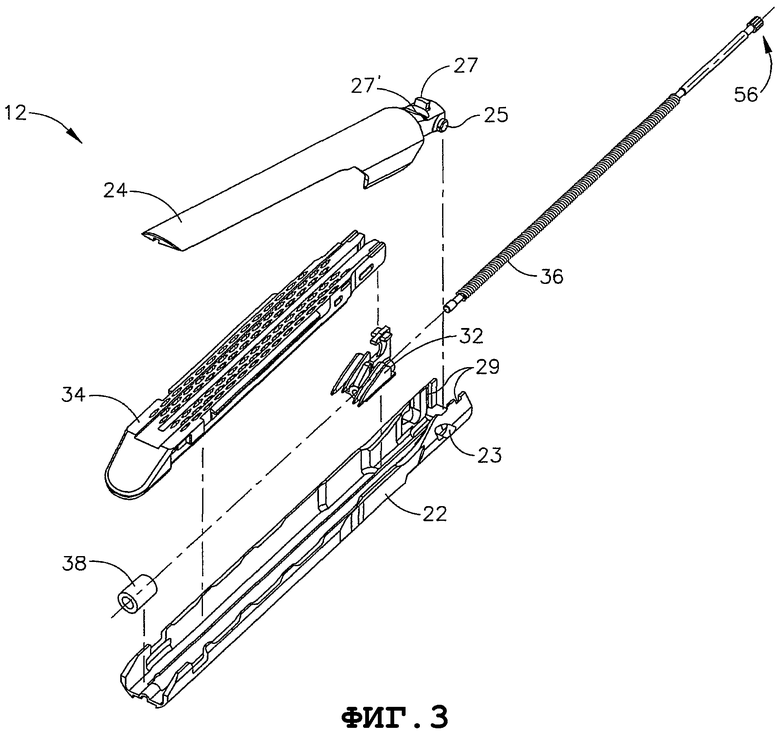
Фигура 3 - общий вид с пространственным разделением деталей варианта осуществления концевого эффектора в соответствии с настоящим изобретением;
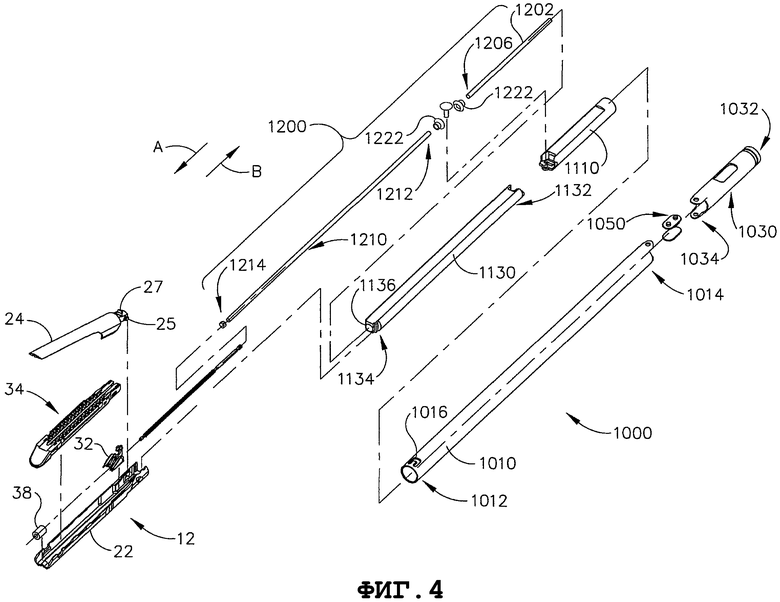
Фигура 4 - еще один общий вид с пространственным разделением деталей, представляющий концевой эффектор, узел ведущего вала и узел удлиненного стержня в соответствии с различными вариантами осуществления настоящего изобретения;
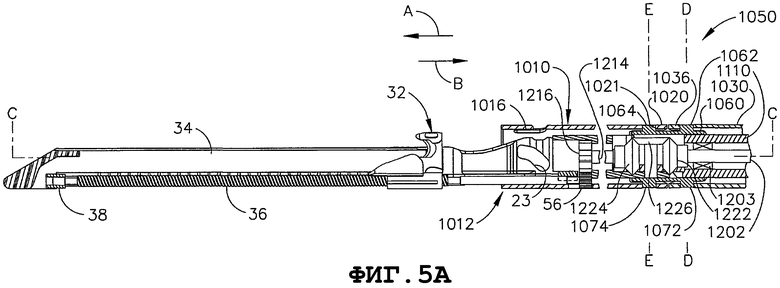
Фигура 5A - вид в разрезе концевого эффектора и дистальных участков узла ведущего вала и узла удлиненного стержня в соответствии с различными вариантами осуществления настоящего изобретения;
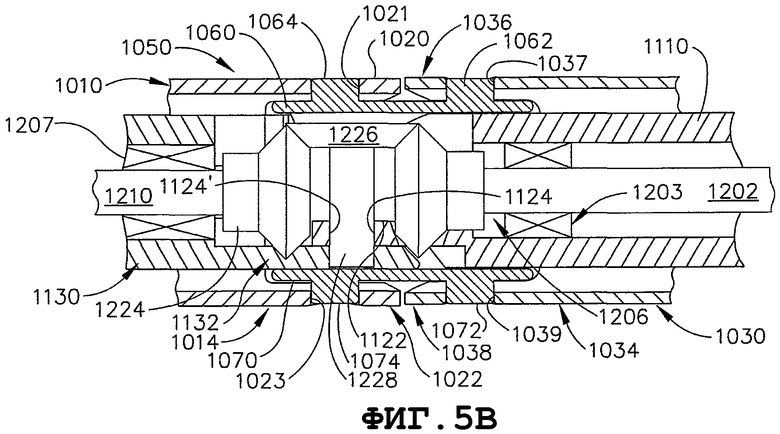
Фигура 5B - увеличенный вид в разрезе шарнирно-поворотного сочленения в соответствии с различными вариантами осуществления настоящего изобретения;
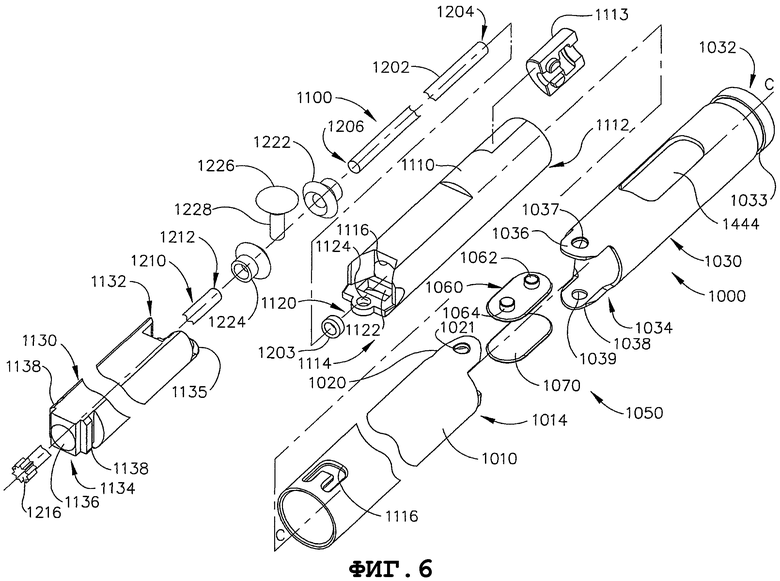
Фигура 6 - общий вид с пространственным разделением деталей узла удлиненного стержня и узла ведущего вала в соответствии с различными вариантами осуществления настоящего изобретения;
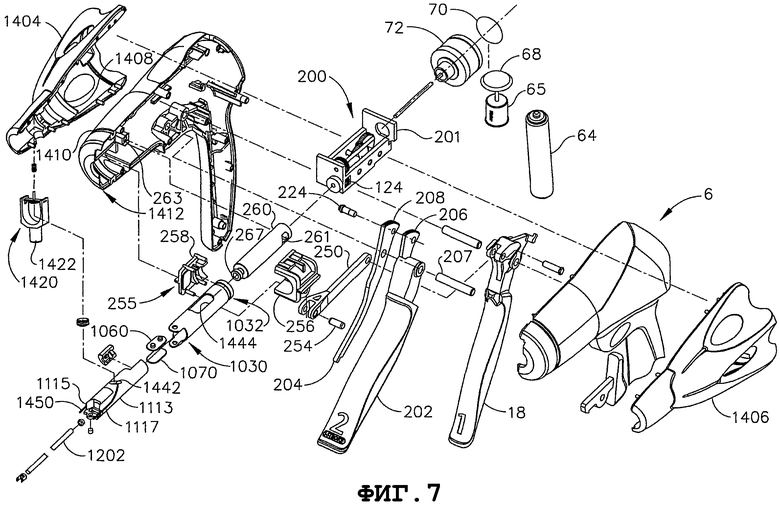
Фигура 7 - общий вид с пространственным разделением деталей управляющей рукоятки в соответствии с различными вариантами осуществления настоящего изобретения;
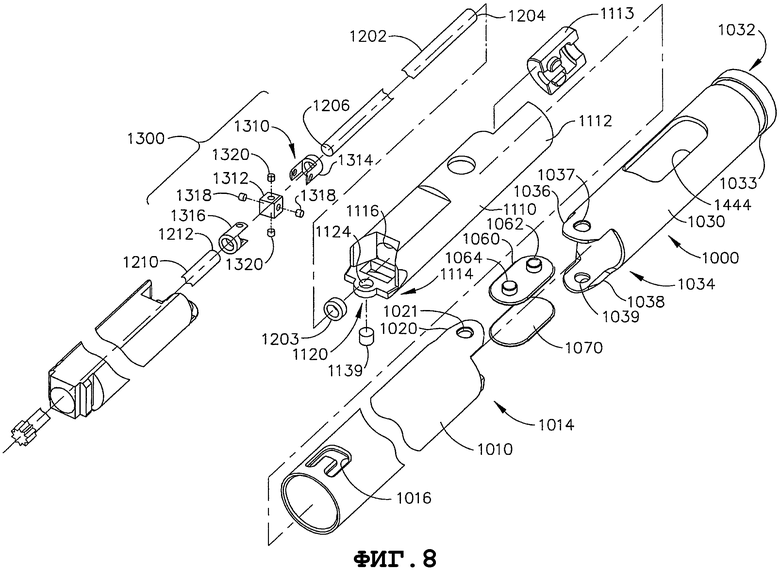
Фигура 8 - вид в перспективе с пространственным разделением деталей узла удлиненного стержня и узла ведущего вала в соответствии с другим вариантом осуществления настоящего изобретения;
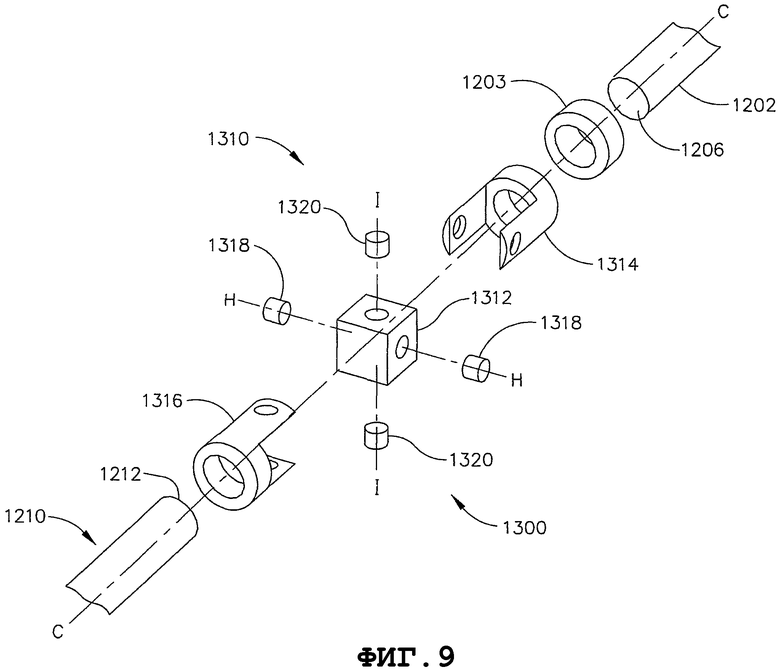
Фигура 9 - общий вид с пространственным разделением деталей шарнирно-поворотного сочленения узла ведущего вала, изображенного на фигуре 8;
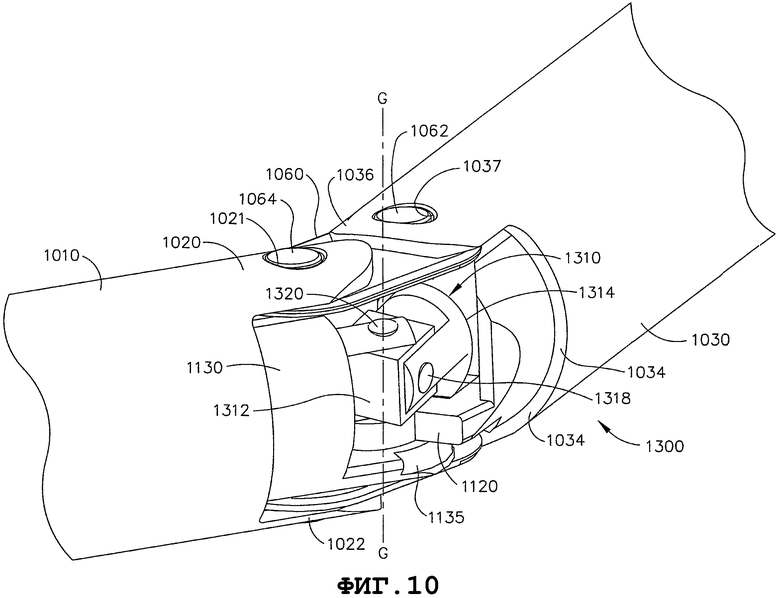
Фигура 10 - местный вид в перспективе шарнирно-поворотного сочленения ведущего вала и проксимального и дистального участков ведущего вала в соответствии с различными вариантами осуществления настоящего изобретения;
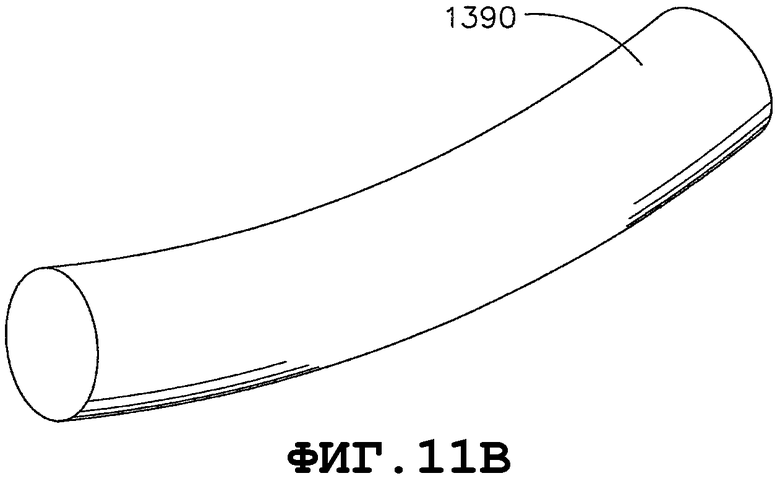
Фигуры 11A-B - изображения торсионного троса, который можно применить в точке сочленения между дистальным и проксимальным участками ведущего вала в соответствии с различными вариантами осуществления настоящего изобретения;
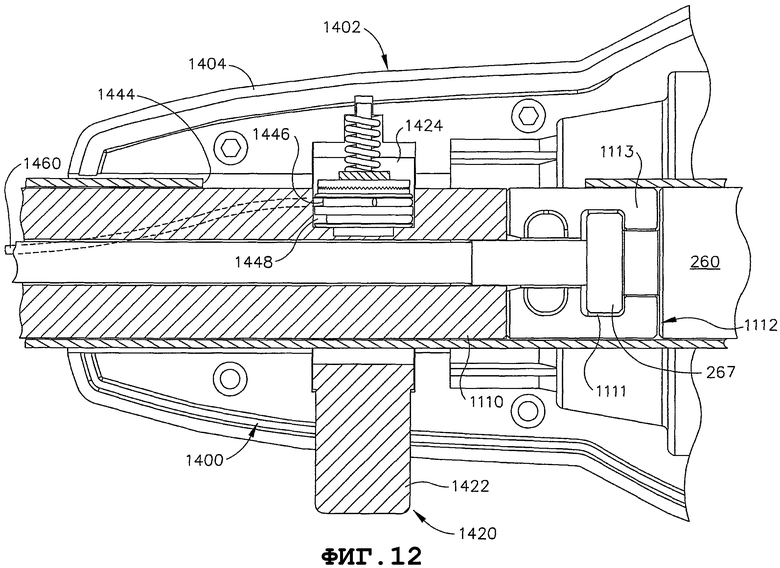
Фигура 12 - местный вид в разрезе конструкции узла фиксации в соответствии с различными вариантами осуществления настоящего изобретения;
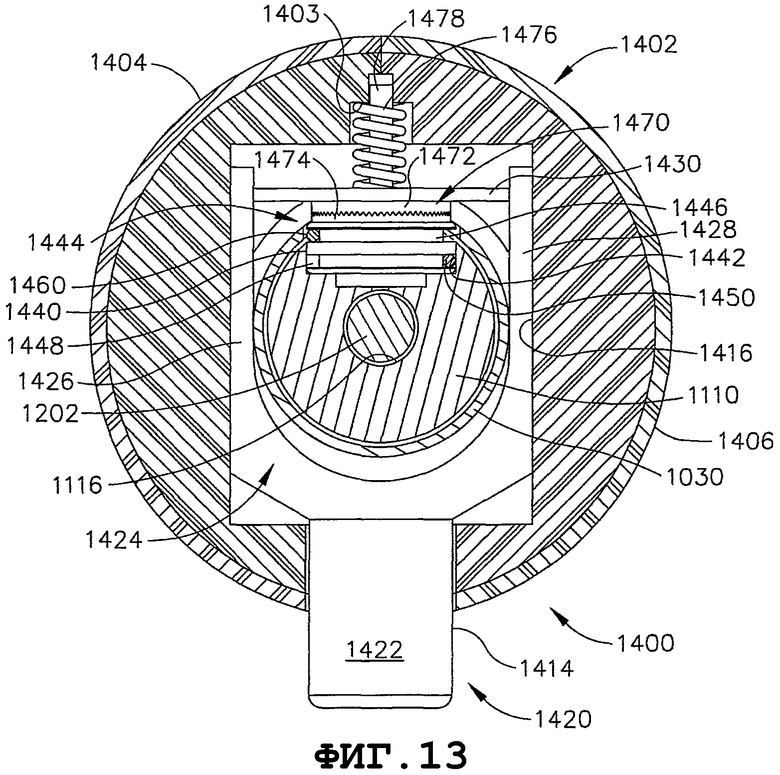
Фигура 13 - вид с торца в разрезе конструкции узла фиксации, показанного на фигуре 12;
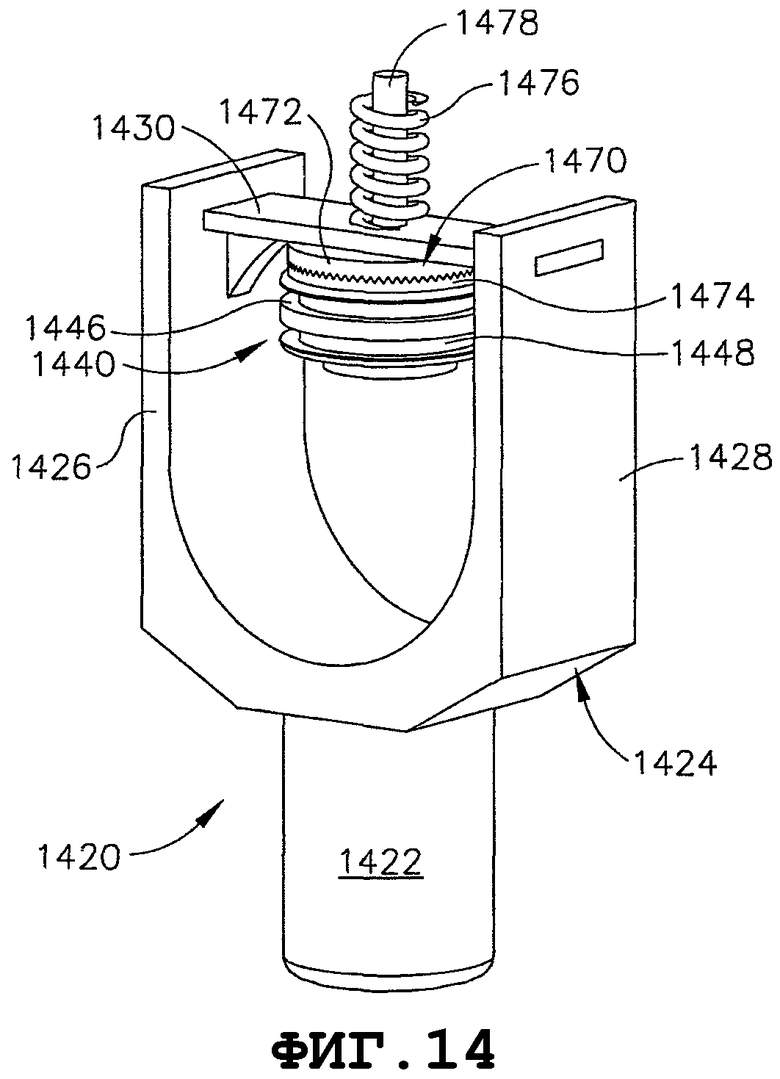
Фигура 14 - вид в перспективе нажимного кнопочного узла в соответствии с различными вариантами осуществления настоящего изобретения;
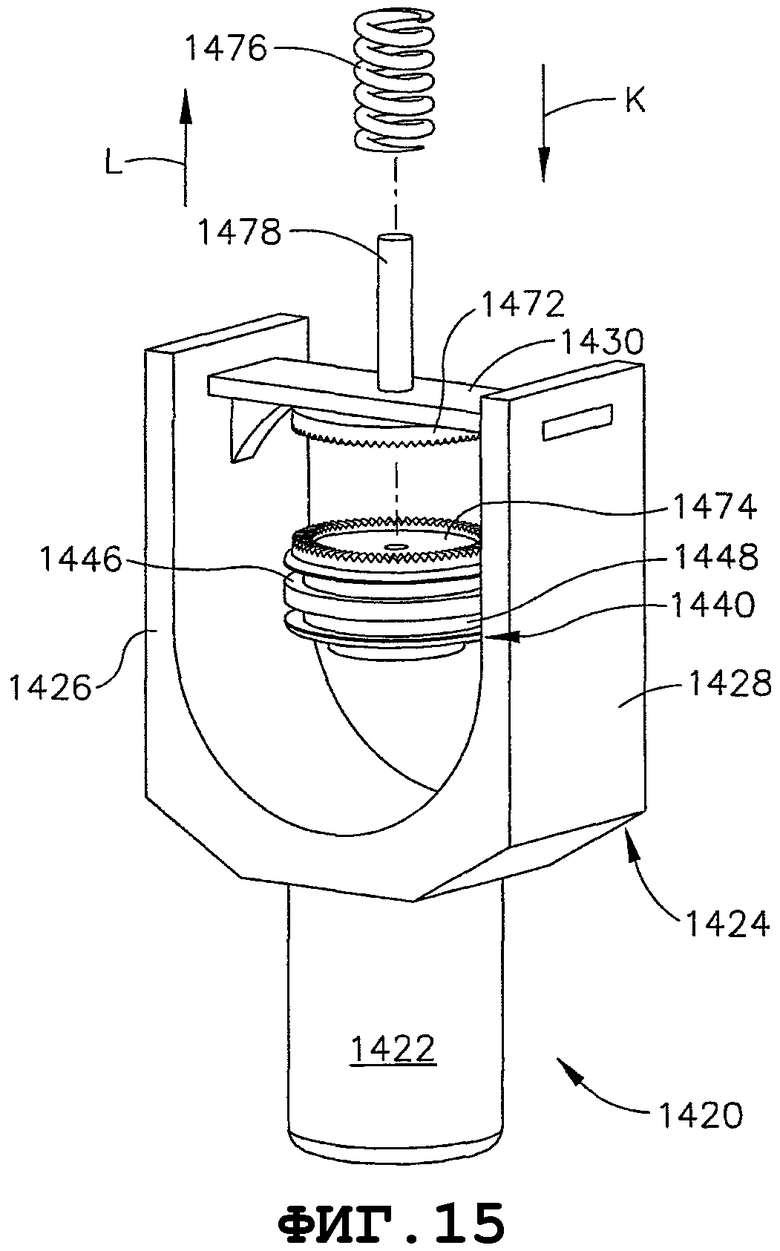
Фигура 15 - общий вид с пространственным разделением деталей нажимного кнопочного узла, показанного на фигуре 14;
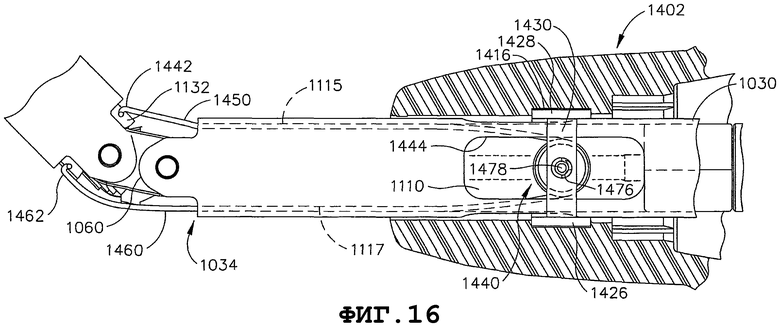
Фигура 16 - местный вид в плане конструкции узла фиксации в соответствии с различными вариантами осуществления настоящего изобретения, с изображением некоторых компонентов в разрезе;
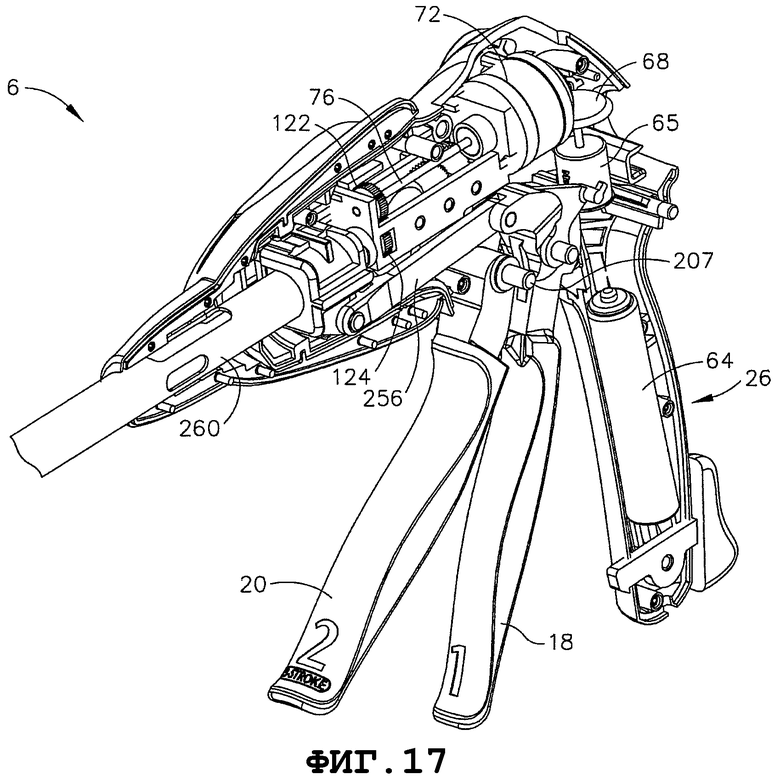
Фигура 17 - вид спереди в перспективе узла рукоятки, которую можно применять в различных вариантах осуществления настоящего изобретения, с участком корпуса, снятым для демонстрации компонентов внутри корпуса;
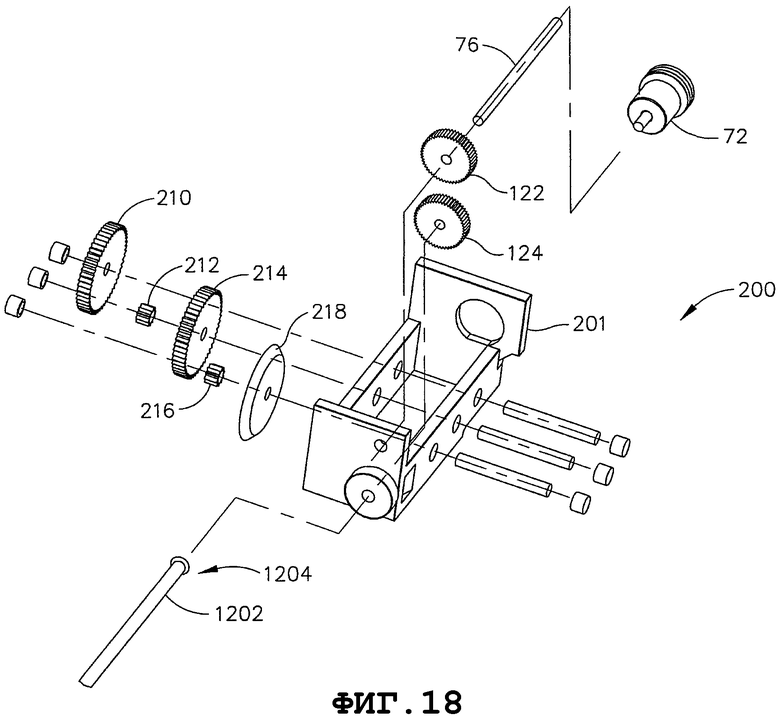
Фигура 18 - общий вид с пространственным разделением деталей зубчатой передачи, которую можно применять в различных вариантах осуществления настоящего изобретения;
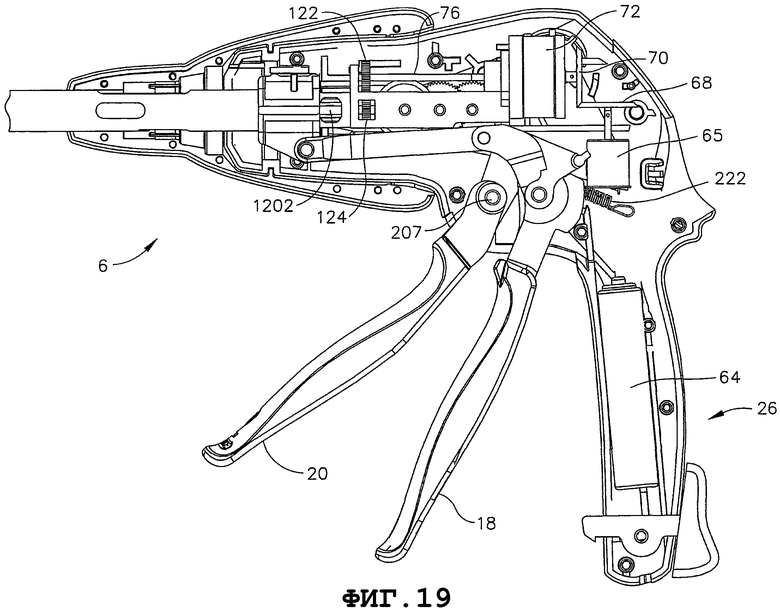
Фигура 19 - вид сбоку узла привода, который можно применять в сочетании с различными вариантами осуществления настоящего изобретения;
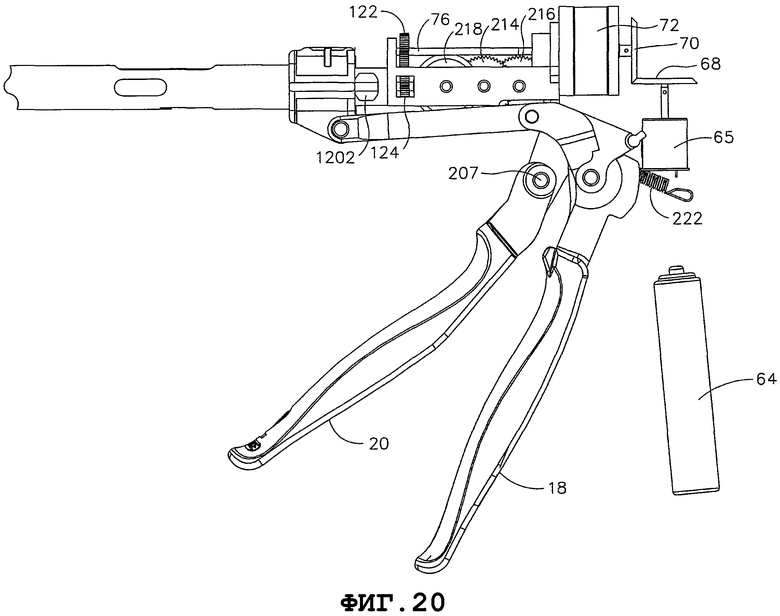
Фигура 20 - другой вид сбоку узла привода, показанного на фигуре 19;
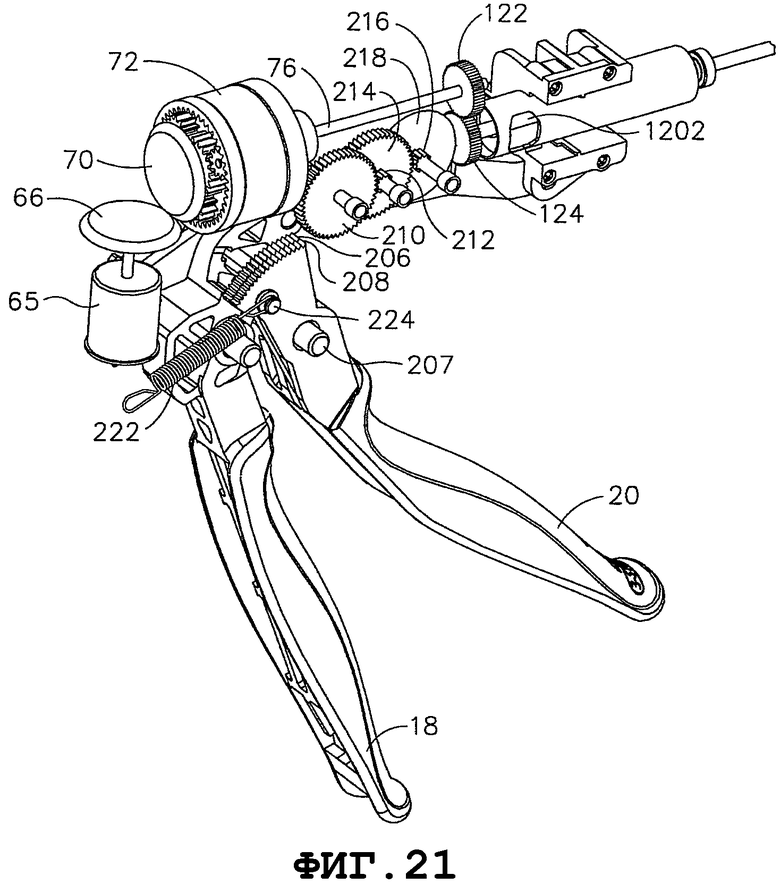
Фигура 21 - вид сзади в перспективе узла привода, показанного на фигурах 19 и 20; и
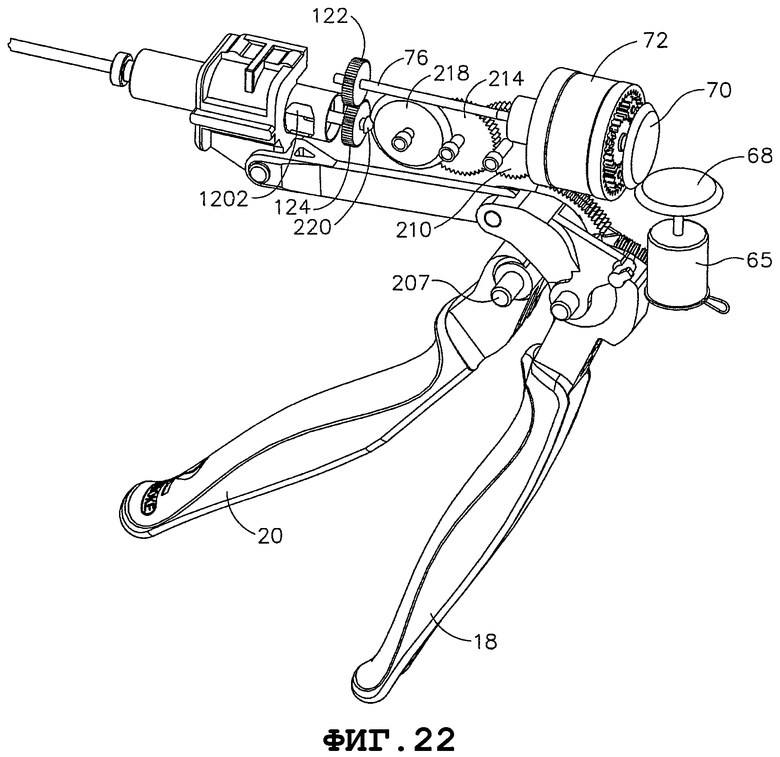
Фигура 22 - вид спереди в перспективе узла привода, показанного на фигурах 19-21.
ПОДРОБНОЕ ОПИСАНИЕ
На фигурах 1 и 2 изображен хирургический сшивающий и отрезной аппарат 10, в котором можно на практике реализовать специфические преимущества настоящего изобретения. Хирургический сшивающий и отрезной аппарат 10 содержит рукоятку 6, удлиненный «стержень» или узел 1000 замыкающей трубки, который соединен с возможностью функционирования с узлом 1000 замыкающей трубки. В показанном варианте осуществления концевой эффектор 12 выполнен с возможностью выполнения функции эндоскопического режущего инструмента для сжатия, отрезания и сшивания скобками ткани, хотя, в других вариантах осуществления можно применять концевые эффекторы других типов, например, концевые эффекторы для хирургических устройств других типов, например, захваты, режущие приспособления, сшивающие скобками аппараты, приспособления для наложения зажимов, устройства доступа, устройства для доставки лекарства генной терапии к месту действия, ультразвуковые, RF- или лазерные устройства и т.п. Хотя хирургический сшивающий и отрезной аппарат 10 описан в виде аппарата с приводом от двигателя или «механизированного аппарата», из дальнейшего подробного описания специалисту в данной области техники будет очевидно, что специфические и новые аспекты настоящего изобретения можно также эффективно применить в сочетании с хирургическими сшивающими и отрезными аппаратами и с остальными эндоскопическими хирургическими аппаратами, в которых применяются механические (немеханизированные) системы для управления участком концевого эффектора упомянутых аппаратов без выхода за пределы существа и объема настоящего изобретения.
Рукоятка 6 аппарата 10 может содержать замыкающий рычаг 18 и рычаг 20 прошивки для приведения в действие концевого эффектора 12. Специалистам в данной области техники очевидно, что аппараты, содержащие концевые эффекторы, предназначенные для разных хирургических целей, могут содержать разные количества или типы рычагов или других подходящих элементов управления для манипулирования концевым эффектором 12. В настоящем примере концевой эффектор 12 содержит, помимо прочего, желоб 22 для скобок и упор 24 с поворотно-поступательным перемещением, которые удерживаются на некотором разделяющем их расстоянии, которое обеспечивает эффективное сшивание скобками и отрезание ткани, зажатой в концевом эффекторе 12. Рукоятка 6 содержит ручку 26 пистолетного типа, к которой замыкающий рычаг 18 подтягивается поворотным движением врачом для осуществления сжатия или смыкания упора 24 и желоба 22 для скобок концевого эффектора 12. Рычаг 20 прошивки находится дальше снаружи от замыкающего рычага 18. После того, как замыкающий рычаг 18 зафиксируется в положении примыкания, как дополнительно поясняется ниже, рычаг 20 прошивки может быть подтянут поворотным движением врачом для осуществления сшивания скобками и отрезания ткани, зажатой в концевом эффекторе 12.
Далее следует понимать, что в настоящем описании термины «проксимальный» и «дистальный» применяют для обозначения положения относительно захвата практикующим врачом рукоятки 6 аппарата 10. Следовательно, концевой эффектор 12 является дистальным относительно более проксимальной рукоятки 6. Дополнительно следует понимать, что, для удобства и ясности, специальные термины, обозначающие пространственное положение, например, «вертикальный» и «горизонтальный», использованы в настоящем описании применительно к чертежам. Однако, существует множество пространственно-угловых положений применения хирургических аппаратов, и упомянутые термины не предполагают ограничительного и абсолютного значения.
Замыкающий рычаг 18 может быть приведен в действие первым. После того, как врач удостоверится в удовлетворительном положении концевого эффектора 12, врач может подтянуть назад замыкающий рычаг 18 в его фиксируемое положение полного примыкания в непосредственной близости от ручки 26 пистолетного типа. Затем можно приводить в действие рычаг 20 прошивки. Рычаг 20 прошивки возвращается в разжатое положение (смотри фигуры 1 и 2), когда врач прекращает нажатие, как более полно описано ниже. Деблокирующая кнопка 30 на рукоятке 6 и, в данном примере, на ручке 26 пистолетного типа, при нажатии, может отпустить зафиксированный замыкающий рычаг 18.
На фигуре 3 представлен вид с пространственным разделением деталей одного концевого эффектора 12 в соответствии с различными вариантами осуществления. Как показано в представленном варианте осуществления, концевой эффектор 12 может содержать, в дополнение к вышеупомянутым желобу 22 и упору 24, приводной элемент 32 ножа и скользящего блока, кассету 34 для скобок, винтовой шпиндель 36 и подшипник 38, который прикреплен к конструкции желоба 22. Упор 24 может быть соединен с возможностью поворота с желобом 22 на проксимальной оси поворота. В одном варианте осуществления, например, упор 24 содержит выступающие вбок шарнирные пальцы 25 на его проксимальном конце, которые находятся в зацеплении с возможностью поворота с шарнирными отверстиями 23, сформированными вблизи проксимального конца желоба 22. Как более подробно поясняется ниже, когда замыкающий рычаг 18 приводится в действие, то есть подтягивается пользователем аппарата 10, упор 24 может поворачиваться на шарнирных пальцах 25 в шарнирных отверстиях 23 в желобе 22 вокруг оси поворота в сжатое или сомкнутое положение. Если сжатие концевым эффектором 12 является удовлетворительным, оперирующий хирург приводит в движение рычаг 20 прошивки, что, как более подробно изложено ниже, вынуждает приводной элемент 32 ножа и скользящего блока перемещаться по желобу 22 с отрезанием, тем самым, ткани, зажатой в концевом эффекторе 12.
На фигуре 4 представлен общий вид с пространственным разделением деталей узла 1000 удлиненной замыкающей трубки, узла 1200 ведущего вала и концевого эффектора в соответствии с одним вариантом осуществления настоящего изобретения. На фигуре 5 представлен вид в разрезе кассеты 34 и дистальных участков узла удлиненного стержня и узла ведущего вала. На фигуре 6 представлен еще один общий вид с пространственным разделением деталей узла 1000 удлиненной замыкающей трубки и узла 1200 ведущего вала. На фигуре 7 изображено сопряжение между узлом 1000 удлиненной замыкающей трубки и управляющей рукояткой 6. Как можно видеть на фигурах 4 и 5, один вариант осуществления узла 1000 удлиненной замыкающей трубки содержит дистальный сегмент 1010 замыкающей трубки, который имеет «второй» дистальный конец 1012 и «второй» проксимальный конец 1014.
В различных вариантах осуществления, дистальный сегмент 1010 замыкающей трубки содержит U-образное отверстие 1016 на его дистальном конце 1012. Данное U-образное отверстие 1016 выполнено с возможностью зацепления выступающей вверх замыкающей лапки 27, сформированной на упоре 24. Смотри фигуру 4. Таким образом, когда дистальный сегмент 1010 замыкающей трубки перемещается в дистальном направлении (по стрелке «A»), он контактирует с замыкающей лапкой 27 и вызывает поворот упора 24 в сомкнутое положение. Когда дистальный сегмент 1010 замыкающей трубки перемещается в проксимальном направлении (по стрелке «B»), он контактирует с замыкающей лапкой 27 и вызывает поворот упора 24 в разомкнутое положение (в сторону от желоба 22).
Как можно видеть на фигурах 4 и 6, узел 1000 удлиненной замыкающей трубки дополнительно содержит проксимальный сегмент 1030 замыкающей трубки, который имеет проксимальный конец 1032 и дистальный конец 1034. Проксимальный конец 1032 проксимального сегмента 1030 замыкающей трубки соединен с возможностью шарнирного поворота с дистальным концом 1014 дистального сегмента 1010 замыкающей трубки шарнирно-поворотным сочленением, обозначенным, в общем, позицией 1050. В частности и как показано на фигурах 5A, 5B и 6, шарнирно-поворотное сочленение 1050 содержит в различных вариантах осуществления первую верхнюю петлю 1036, выступающую из дистального конца 1034 проксимального сегмента 1030 замыкающей трубки и первую нижнюю петлю 1038, выступающую из дистального конца 1034 проксимального сегмента 1030 замыкающей трубки, расположенную на расстоянии от первой верхней петли 1036. Первая верхняя петля 1036 содержит сквозное первое верхнее шарнирное отверстие 1037, и первая нижняя петля 1038 содержит сквозное первое нижнее шарнирное отверстие 1039, которое соосно первому верхнему отверстию 1037 в различных вариантах осуществления. Аналогично, проксимальный конец 1014 дистального сегмента 1010 стержня имеет вторую верхнюю петлю 1020, выступающую из него, вторую нижнюю петлю 1022, выступающую из него, расположенную на расстоянии от второй верхней петли 1020. Вторая верхняя петля 1020 содержит сквозное второе верхнее шарнирное отверстие 1021, и вторая нижняя петля 1022 содержит сквозное второе нижнее шарнирное отверстие 1023, которое, по существу, соосно второму верхнему отверстию 1021. Смотри фигуру 5B.
В различных вариантах осуществления, шарнирно-поворотное сочленение 1050 дополнительно содержит верхнее двухшарнирное соединительное звено 1060, которое имеет первый верхний палец 1062 и второй верхний палец 1064, выступающие из него. Первый верхний палец 1062 имеет размер для вмещения с возможностью поворота в первое верхнее шарнирное отверстие 1037, и второй верхний палец 1064 имеет размер для вмещения с возможностью поворота во второе верхнее шарнирное отверстие 1021. Верхнее двухшарнирное соединительное звено 1060 удерживается в положении между проксимальным концом 1014 дистального сегмента 1010 замыкающей трубки и дистальным концом 1034 проксимального сегмента 1030 замыкающей трубки посредством проксимального сегмента 1100 несущей трубки и дистального сегмента 1130 несущей трубки. Шарнирно-поворотное сочленение 1050 дополнительно содержит нижнее двухшарнирное соединительное звено 1070, которое имеет первый нижний палец 1072 и второй нижний палец 1074, выступающие из него. Первый нижний палец 1072 имеет размер для вмещения с возможностью поворота в первое нижнее шарнирное отверстие 1039, и второй нижний палец 1074 имеет размер для вмещения с возможностью поворота во второе нижнее шарнирное отверстие 1023. Смотри фигуру 5B. Нижнее двухшарнирное соединительное звено 1070 удерживается в положении между проксимальным концом 1014 дистального сегмента 1010 замыкающей трубки и дистальным концом 1034 проксимального сегмента 1030 замыкающей трубки посредством проксимального сегмента 1100 несущей трубки и дистального сегмента 1130 несущей трубки.
Когда верхнее двухшарнирное соединительное звено 1060 и нижнее двухшарнирное соединительное звено 1070 присоединены к проксимальному концу 1014 дистального сегмента 1010 замыкающей трубки и дистальному концу 1034 проксимального сегмента 1030 замыкающей трубки, первый верхний палец 1062 и первый нижний палец 1072 соосны с первой осью D-D поворота, которая, в различных вариантах осуществления, может быть, по существу, поперечна к оси C-C удлиненного стержня, которая продолжается вдоль узла 1000 удлиненной замыкающей трубки. Смотри фигуру 5A. Аналогично, второй верхний шарнирный палец 1064 и второй нижний шарнирный палец 1074 соосны со второй осью E-E поворота. В различных вариантах осуществления, вторая ось E-E поворота, по существу, поперечна к оси C-C удлиненного стержня и, по существу, параллельна первой оси D-D поворота. Далее из настоящего описания очевидно, что описанная схема построения позволяет проксимальному сегменту 1030 замыкающей трубки поворачиваться относительного дистального сегмента 1010 замыкающей трубки вокруг осей D-D и E-E поворота.
Как можно видеть на фигурах 6 и 7, проксимальный конец 1032 проксимального сегмента 1030 замыкающей трубки содержит соединительную канавку, сформированную по его окружности для создания возможности его соединения с опорным узлом 255, который закреплен внутри управляющей рукоятки 6 для сообщения осевого перемещения узла 1000 стержня в дистальном и проксимальном направлениях A, B соответственно, как более подробно поясняется ниже.
Различные варианты осуществления настоящего изобретения дополнительно содержат узел удлиненной несущей трубки, обозначенный, в общем, позицией 1100, который проходит через узел 1000 удлиненной замыкающей трубки, для закрепления в нем различных компонентов узла 1200 ведущего вала. В различных вариантах осуществления, узел 1100 удлиненной несущей трубки содержит проксимальный сегмент 1110 несущей трубки, который имеет проксимальный конец 1112 и дистальный конец 1114. Проксимальный конец 1112 выполнен с возможностью соединения с соединительной тягой 260, расположенной внутри управляющей рукоятки 6, как более подробно изложено ниже.
Как можно видеть на фигуре 6, дистальный конец 1114 проксимального сегмента 1110 несущей трубки содержит нижнюю шарнирную петлю 1120, выступающую из него, назначение которой дополнительно подробнее поясняется ниже. Как можно видеть также на фигуре 6, проксимальный сегмент 1110 несущей трубки содержит первое аксиально проходящее отверстие 1116 под ведущий вал, проходящее сквозь упомянутый сегмент, для вмещения в упомянутое отверстие участка узла 1200 ведущего вала, как также дополнительно поясняется ниже.
Удлиненный несущий узел 1100 содержит также дистальный сегмент 1130 несущей трубки, который содержит проксимальный конец 1132 и дистальный конец 1134. Дистальный сегмент 1130 несущей трубки содержит аксиально проходящее отверстие 1136 под ведущий вал, проходящее сквозь упомянутый сегмент. Дистальный конец 1134 дистального сегмента 1130 несущей трубки конструктивно выполнен также с возможностью соединения с желобом 22. В одном варианте осуществления, например, дистальный конец 1134 дистального сегмента 1130 несущей трубки может быть сформирован с парой крепежных стоек 1138, которые выполнены с возможностью фиксируемого сцепления с пазами 29, выполненными на конце желоба 22. Смотри фигуру 3. Крепежные стойки 1138 могут быть зафиксированы в пазах 29 благодаря заключению дистального несущего сегмента 1130 внутри дистального сегмента 1010 замыкающей трубки, который принуждает как желоб 22, так и дистальный несущий сегмент 1130 всегда иметь одну осевую линию и так, что дистальный конец 1134 дистального сегмента 1130 несущей трубки жестко соединен с желобом 22. Далее из описания становится понятно, что узел 1100 удлиненной несущей трубки выполнен с таким размером относительно узла 1000 удлиненной замыкающей трубки, что узел 1000 удлиненной замыкающей трубки может свободно аксиально перемещаться по нему.
Как можно видеть на фигурах 4-6, узел 1200 ведущего вала установлен с возможностью функционирования в узел 1100 удлиненной несущей трубки, который закреплен в узле 1000 удлиненной замыкающей трубки. В различных вариантах осуществления, узел 1200 ведущего вала содержит проксимальный участок 1202 ведущего вала, шарнирно-поворотное сочленение 1220 ведущего вала и дистальный участок 1210 ведущего вала. Проксимальный участок 1202 ведущего вала имеет размер для прохождения сквозь вытянутое отверстие 1116 под ведущий вал в проксимальном сегменте 1110 несущей трубки и может опираться в нем с возможностью вращения на подшипник 1203. Проксимальный участок 1202 ведущего вала имеет проксимальный конец 1204 и дистальный конец 1206.
Дистальный участок 1210 ведущего вала выполнен в размер для продолжения сквозь отверстие 1136 под ведущий вал в дистальном сегменте 1130 несущей трубки и опирается в нем с возможностью вращения на подшипник 1207. Смотри фигуру 5B. Дистальный участок 1210 ведущего вала имеет проксимальный конец 1212 и дистальный конец 1214. Дистальный конец 1214 содержит ведущую шестерню 1216, закрепленную на нем, которая находится в зацеплении с зубчатым колесом 56, закрепленным на винтовом шпинделе 36. Смотри фигуру 5A.
В одном варианте осуществления, изображенном на фигурах 4-6, шарнирно-поворотное сочленение 1220 ведущего вала содержит первую проксимальную коническую шестерню 1222, закрепленную на дистальном конце 1206 проксимального участка 1202 ведущего вала. В первой нижней шарнирной петле 1120 обеспечена сквозная габаритная прорезь 1122 для создания возможности вращения первой проксимальной конической шестерни 1222 относительно упомянутой петли. Данный вариант осуществления шарнирно-поворотного сочленения 1220 ведущего вала дополнительно содержит первую дистальную коническую шестерню 1224, закрепленную на проксимальном конце 1212 дистального участка 1210 ведущего вала. Во второй нижней шарнирной петле 1135, выступающей из проксимального конца 1132 дистального сегмента 1130 несущей трубки обеспечена сквозная прорезь 1137 для создания возможности свободного вращения первой дистальной конической шестерни 1224 относительно второй нижней шарнирной петли 1135. Кроме того, в данном варианте осуществления шарнирно-поворотное сочленение 1220 ведущего вала содержит центральную коническую шестерню 1226, которая установлена на оси 1228, которая установлена с возможностью вращения в шарнирное отверстие 1124, выполненное в первой нижней шарнирной петле 1120, и шарнирное отверстие 1124′, выполненное во второй нижней шарнирной петле 1135. Смотри фигуру 5B. Из дальнейшего описания очевидно, что ось 1228 служит для присоединения с возможностью поворота дистального конца 1114 проксимального сегмента 1110 несущей трубки к проксимальному концу 1132 дистального сегмента 1130 несущей трубки. Центральная коническая шестерня 1226 поддерживается в зацеплении с первой дистальной конической шестерней 1224 и первой проксимальной конической шестерней 1222 таким образом, что вращение проксимального участка 1202 ведущего вала передается дистальному участку 1210 ведущего вала через шарнирно-поворотное сочленение 1220 ведущего вала, при одновременной поддержке шарнирно-поворотного перемещения узла 1200 ведущего вала, когда проксимальный сегмент 1030 замыкающей трубки узла 1000 удлиненной замыкающей трубки шарнирно поворачивают относительно дистального сегмента 1010 замыкающей трубки.
На фигурах 8-10 изображено альтернативное шарнирно-поворотное сочленение 1300 ведущего вала, которое можно применять для поддержки существенного всестороннего движения проксимального участка 1202 ведущего вала относительно дистального участка 1210 ведущего вала. Как можно видеть на фигуре, узел 1000 удлиненной замыкающей трубки и узел 1100 удлиненной несущей трубки могут быть конструктивно выполнены и могут действовать вышеописанным образом. Как показано на фигурах 8 и 10, в данном варианте осуществления, первая нижняя шарнирная петля 1120 на проксимальном сегменте 1110 несущей трубки соединена с возможностью поворота со второй нижней шарнирной петлей 1135 на дистальном сегменте 1130 несущей трубки вертикальным шарнирным пальцем 1139. В частности, шарнирный палец 1139 вмещен с возможностью поворота в шарнирное отверстие 1124 в первой нижней шарнирной петле 1120 и другое шарнирное отверстие (не показано) во второй нижней шарнирной петле 1135 для поддержки поворотного движения проксимального сегмента 1110 несущей трубки относительно дистального сегмента 1130 несущей трубки вокруг оси G-G поворота, которая образована шарнирным пальцем 1139.
Кроме того, в настоящем варианте осуществления шарнирно-поворотное сочленение 1300 ведущего вала содержит универсальный шарнир 1310, который содержит центральную соединительную коробку 1312, которая соединена с возможностью поворота с проксимальным вильчатым элементом 1314 и дистальным вильчатым элементом 1316. Как показано в вышеприведенном описании, дистальный конец 1206 проксимального участка 1202 ведущего вала установлен с возможностью вращения в проксимальный сегмент 1110 несущей трубки на подшипнике 1203. Проксимальный вильчатый узел 1314 присоединен к дистальному концу 1206 проксимального участка 1202 ведущего вала и конструктивно выполнен для вмещения с возможностью поворота пары проксимальных шарнирных пальцев 1318, которые закреплены или иным образом сформированы в центральной соединительной коробке 1312. Данные проксимальные шарнирные пальцы 1318 поддерживают поворотное движение центральной соединительной коробки 1312 относительно проксимального участка 1202 ведущего вала вокруг проксимальной оси H-H поворота, которая может быть, по существу, поперечна продольной оси C-C стержня.
Аналогично, дистальный вильчатый узел 1316 присоединен к проксимальному концу 1212 дистального участка 1210 ведущего вала. Дистальный вильчатый узел 1316 выполнен для вмещения с возможностью поворота пары дистальных шарнирных пальцев 1320, закрепленных или иным образом сформированных в центральной соединительной коробке 1312. Данные дистальные шарнирные пальцы 1320 поддерживают поворотное движение вокруг дистальной оси I-I поворота, которая, по существу, поперечна проксимальной оси H-H поворота и продольной оси C-C стержня.
На фигурах 11A и 11B изображена еще одна конструкция шарнирного поворота ведущего вала согласно настоящему изобретению, которую можно применять для поддержки существенного всестороннего движения проксимального участка 1202 ведущего вала относительно дистального участка 1210 ведущего вала. В данном варианте осуществления торсионный трос 1390 подсоединен между проксимальным концом 1212 дистального участка 1210 ведущего вала и дистальным концом 1206 проксимального участка 1202 ведущего вала для создания возможности шарнирного поворота проксимального участка 1202 ведущего вала относительно дистального участка 1210 ведущего вала.
На фигуре 7 показаны также компоненты примерной смыкающей системы для смыкания (или сжатия) упора 24 концевого эффектора 12 посредством отведения назад замыкающего рычага 18. В представленном варианте осуществления смыкающая система содержит вилку 250, соединенную с замыкающим рычагом 18. Шарнирный палец 252 вставлен сквозь совмещенные отверстия как в замыкающем рычаге 18, так и в вилке 250 таким образом, что оба упомянутых элемента поворачиваются вокруг одной точки. Дистальный конец вилки 250 соединен пальцем 254 с первым участком 256 замыкающей скобы 255. Первый участок 256 замыкающей скобы соединяется со вторым участком 258 замыкающей скобы. В собранном виде замыкающая скоба 255 образует отверстие, в которое посажен и зафиксирован проксимальный конец 1032 проксимального сегмента 1030 замыкающей трубки так, что продольное перемещение замыкающей скобы 255 вызывает продольное перемещение проксимального сегмента 1030 замыкающей трубки (и, в конечном счете, узла 1000 удлиненной замыкающей трубки). Аппарат 10 содержит также замыкающий шток 260, находящийся внутри проксимального сегмента 1030 замыкающей трубки. Замыкающий шток 260 может содержать проем 261, в который входит стойка 263 одной из внешних деталей рукоятки, например, внешней нижней боковины 59 в показанном варианте осуществления, для жесткого соединения замыкающего штока 260 с рукояткой 6. При этом проксимальный сегмент 1030 замыкающей трубки может продольно перемещаться относительно замыкающего штока 260. Замыкающий шток 260 может также содержать дистальный кольцевой выступ 267, который входит в проточку 1111 в проксимальном конце 1112 проксимального сегмента 1110 несущей трубки и фиксируется в данной проточке крышкой 1113 (смотри фигуры 6-8 и 12).
Когда, в процессе работы, вилка 250 поворачивается из-за перемещения назад замыкающего рычага 18, замыкающая скоба 255 вынуждает проксимальный сегмент 1030 замыкающей трубки перемещаться в проксимальном направлении (т.е. к рукояточному концу аппарата 10), что вызывает перемещение дистального сегмента 1010 замыкающей трубки в проксимальном направлении. Так как лапка 27 продолжается сквозь отверстие 45 в дистальном сегменте 1010 замыкающей трубки, то лапка 27 приводит упор к размыканию, когда дистальная замыкающая трубка перемещается в проксимальном направлении. Когда замыкающий рычаг 18 деблокируется из положения фиксации, проксимальный сегмент 1030 замыкающей трубки принуждается к сдвигу в дистальном направлении, что приводит к сдвигу дистального сегмента 1010 замыкающей трубки в дистальном направлении. Дистальный сегмент 1010 замыкающей трубки приводит упор 24 в состояние смыкания посредством его сдвига в дистальном направлении воздействием на замыкающий выступ 27′, который находится с дистальной стороны от лапки 27. Дальнейшее смыкание обеспечивается тем, что перемещение упора 24 в дистальном направлении вынуждает шарнирный палец 25 упора перемещаться в дистальном направлении по криволинейному пазу 23 в желобе 22, с созданием сжимающих нагрузок благодаря такому кулачковому действию и окружному обжиму обеих частей дистальным сегментом 1010 замыкающей трубки. Тем самым, при отведении назад и фиксации замыкающего рычага 18, оперирующий хирург может зажимать ткань между упором 24 и кассетой 34, установленной в желобе 22, и может разжать ткань после операции отрезания/сшивания скобками разблокированием замыкающего рычага 20 из положения фиксации.
Как показано на фигуре 2, концевой эффектор 12 и дистальный конец 1012 дистального сегмента замыкающей трубки выполнены с размером для введения через узел 900 троакара в пациента. Данные узлы троакаров известны в техники, поэтому их конструкция и принцип действия подробно не поясняются в настоящем описании. Например, в патенте США № 6,017,356, изобретателей Фредерика с соавторами (Frederick et al.), «METHOD FOR USING A TROCAR FOR PENETRATION AND SKIN INCISION», описание которого целиком включено в настоящую заявку путем отсылки, содержатся описания различных узлов троакаров. Однако из дальнейшего описания станет очевидно, что, конечно, различные варианты настоящего изобретения можно эффективно использовать с множеством разнообразных конструкций троакаров, канюль и т.п. без выхода за пределы существа и объема настоящего изобретения. Поэтому различные варианты осуществления настоящего изобретения и эквивалентные им конструкции ни в коем случае не должны ограничиваться применением с троакаром конкретного типа, описанным для примера в настоящей заявке.
Как можно видеть на фигуре 2, узел 900 троакара содержит узел 902 канюли, который присоединен к корпусу 904 канюли. Концевой эффектор 12 и дистальный конец 1012 дистального сегмента 1010 замыкающей трубки имеют размер для введения через корпус 904 канюли и узел 902 канюли в пациента. В зависимости от подлежащей выполнению процедуры и местоположения подлежащих оперированию органов, в троакар 900 можно вводить участки различной длины дистального сегмента 1010 замыкающей трубки. Участок узла 1000 замыкающей трубки, который выполнен с возможностью введения в троакар 900, именуется в настоящем описании «дистальным участком» 1002 и, очевидно, может содержать, по существу, весь дистальный сегмент 1010 замыкающей трубки до проксимального конца 1014, так что шарнирно-поворотное сочленение 1050 остается снаружи троакара 900 и функционально предназначено для предоставления хирургу или врачу возможности шарнирно поворачивать рукоятку 6 относительно дистального участка 1002 в троакаре. Кроме того, из дальнейшего описания очевидно, что дистальный участок 1002 может включать в себя несколько меньшую длину, чем всю длину дистального сегмента 1010 замыкающей трубки. Таким образом, различные варианты осуществления настоящего изобретения дают хирургу возможность шарнирно поворачивать рукоятку 6 устройства 10 в более эргономически удобное положение во время работы на шарнирных соединительных звеньях 1060 и 1070.
Различные варианты осуществления настоящего изобретения могут быть также снабжены системой 1400 фиксации, которая давала бы хирургу возможность фиксировать рукоятку в заданном положении относительно участка устройства, введенного в троакар 900. В частности и как показано на фигурах 12-15, один вариант осуществления системы фиксации может быть установлен внутри поворотного корпусного узла 1402, который соединен с передним участком 1412 рукоятки 6. В различных вариантах осуществления корпусной узел 1402 может содержать первый корпусной сегмент 1404 и второй корпусной сегмент 1406, которые конструктивно выполнены с возможностью сборки одного с другим с образованием корпуса 1402. Корпусные сегменты 1404, 1406 могут быть сформированы из пластика и конструктивно выполнены с возможностью удерживания воедино защелкивающимися приспособлениями и/или на клеях, винтах и т.п. Как можно видеть на фигуре 7, корпусной сегмент 1404 содержит кольцевой сегмент 1408, сформированный в нем, который выполнен с возможностью сопряжения с аналогичным кольцевым сегментом (не показан), который сформирован изнутри корпусного сегмента 1406, для формирования составного кольцевого выступа, имеющего размер для вмещения в кольцевую канавку 1410, сформированную в переднем участке 1412 рукоятки 6. Данная конструкция делает возможным присоединение корпусного узла 1402 к рукоятке 6 и его свободный поворот относительно данной рукоятки.
Как можно видеть на фигурах 12 и 13, корпусной узел 1402 вмещает исполнительный узел в виде нажимного кнопочного узла 1420. В различных вариантах осуществления нажимной кнопочный узел 1420 может содержать нажимной кнопочный участок 1422 и соединенный с ним вильчатый участок 1424. Как можно видеть на фигуре 13, нажимной кнопочный участок 1422 выполнен с возможностью выступания наружу через отверстие 1414, сформированное в корпусе 1402, и вильчатый участок 1424 установлен с возможностью сдвига в гнезде 1416, сформированном в корпусе 1402. Вильчатый участок 1424 содержит пару стоек 1426, 1428, которые разделены концевой распоркой 1430. Как также можно видеть на фигуре 13, проксимальный сегмент 1030 замыкающей трубки установлен между стоек 1426, 1428 так, что проксимальный сегмент 1030 замыкающей трубки может аксиально перемещаться между ними на проксимальном сегменте 1110 несущей трубки. Как можно видеть на данной фигуре, проксимальный участок 1202 ведущего вала установлен с возможностью перемещения в аксиально продолжающемся отверстии 1116 в проксимальном сегменте 1110 несущей трубки.
Как можно видеть на фигурах 12 и 13, тросовый барабанчик 1440 установлен с возможностью поворота в гнезде 1442 под барабанчик, предусмотренном в проксимальном сегменте 1110 несущей трубки, и продолжается сквозь отверстие 1444 в проксимальном сегменте 1030 замыкающей трубки. Данная конструкция позволяет тросовому барабанчику 1440 свободно поворачиваться в гнезде 1442 под барабанчик. Тросовый барабанчик 1440 имеет верхнюю канавку 1446 под трос и нижнюю канавку 1448 под трос, сформированные по его периметру. Правый натяжной трос 1450 вмещен в нижнюю канавку под трос, и левый натяжной трос 1460 вмещен в верхнюю канавку под трос. Правый натяжной трос 1450 вмещен в первую канавку 1115, сформированную во внешней поверхности 1113 проксимального сегмента 1110 несущей трубки, и левый натяжной трос 1460 вмещен во вторую канавку 1117, сформированную во внешней поверхности 1113 проксимального сегмента 1110 несущей трубки. Смотри фигуру 16. Правый натяжной трос 1440 имеет дистальный конец 1442, который прикреплен к правой стороне проксимального конца 1132 дистального сегмента 1130 несущей трубки, и проксимальный конец, который прикреплен к тросовому барабанчику 1440. Аналогично, левый натяжной трос 1460 имеет дистальный конец 1462, который прикреплен к левой стороне проксимального конца 1132 дистального сегмента 1130 несущей трубки, и проксимальный конец, который прикреплен к тросовому барабанчику 1440. Смотри фигуру 16. Следовательно, когда проксимальный сегмент 1030 замыкающей трубки и рукоятку 6 шарнирно поворачивают относительно дистального сегмента 1010 замыкающей трубки, тросовый барабанчик 1440 приводится к повороту в гнезде 1442 под тросовый барабанчик благодаря натяжным тросам 1450, 1460.
Различные варианты осуществления узла фиксации содержат также расцепляемый зубчатый узел 1470 для фиксации тросового барабанчика 1440, который, в конечном счете, не допускает шарнирного поворота проксимального сегмента 1030 замыкающей трубки (и рукоятки 6) относительно дистального сегмента 1010 замыкающей трубки. В частности и как показано на фигурах 13-15, расцепляемый зубчатый узел 1470 содержит первое зубчатое колесо 1472, которое прикреплено к поперечной распорке 1430 на нажимном кнопочном узле 1420. Второе сопряженное зубчатое колесо 1474 закреплено на торце тросового барабанчика 1440 и выполнено с возможность избирательного ввода в зацепление с первым неподвижным зубчатым колесом 1472. Первое зубчатое колесо 1472 поджимается в зацепление фиксирующей пружиной 1476, которая установлена на стопорном штыре 1478, выступающем из поперечной распорки 1430 и вмещается в гнездо под пружину, сформированное в корпусном узле. Пружина 1476 служит для поджима первого и второго зубчатых колес 1472, 1474 в сцепление между собой (например, в направлении «K»). Смотри фигуру. Когда пользователь нажимает нажимную кнопку 1422 в направлении «L», первое зубчатое колесо 1472 выходит из сцепления со вторым зубчатым колесом 1474 и, тем самым, позволяет поворачиваться второму зубчатому колесу 1464 и тросовому барабанчику 1440, к которому закреплено упомянутое колесо.
Узел 1420 фиксации может действовать следующим образом. Когда первое и второе зубчатые колеса 1472, 1474 находятся в зацеплении, как показано на фигурах 13 и 14, тросовый барабанчик 1440 не может поворачиваться, и правый трос 1450, и левый трос 1460 предотвращают шарнирный поворот проксимальной замыкающей трубки 1030 (и рукоятки) на двухшарнирных соединительных звеньях 1060, 1070 относительно дистального сегмента 1010 замыкающей трубки. Для деблокирования шарнирно-поворотного сочленения 1050 пользователь вжимает нажимную кнопку 1422 внутрь для приведения первого зубчатого колеса 1472 в расцепление со вторым зубчатым колесом 1474. Затем пользователь может шарнирно повернуть проксимальный сегмент 1030 замыкающей трубки (и рукоятку 6) относительно дистального сегмента 1010 замыкающей трубки. После того, как хирург шарнирно повернул рукоятку 6 в заданное положение, нажимную кнопку 1422 отпускают, и первая зубчатая шестерня 1472 поджимается в сцепление со второй зубчатой шестерней 1474 с фиксацией шарнирно-поворотного сочленения 1050 в данном положении. Очевидно, что корпусной узел 1402, проксимальный сегмент 1030 замыкающей трубки и узел 1420 фиксации можно поворачивать относительно рукоятки 6 для предоставления пользователю дополнительной способности маневрирования.
На фигурах 17-22 представлен один аспект конструкции механизированного привода для приведения в движение эндоскопического режущего инструмента 10. В различных вариантах осуществления можно также эффективно применять другие конструкции механизированного привода, например, в различных вариантах осуществления можно также эффективно применять конструкции, описанные в совместно рассматриваемых заявках на патенты США, которые выше полностью включены в настоящее описание путем отсылки. Однако, как также упоминалось ранее, специфические и новые аспекты настоящего изобретения можно также применять на практике в связи с хирургическими устройствами с механическим приводом, без выхода за пределы существа и объема настоящего изобретения. Как можно видеть на фигуре 7 и фигурах 17-22, один примерный вариант осуществления содержит редукторный узел 200, содержащий несколько шестерен, расположенных в корпусной раме 201, где шестерни установлены между планетарной зубчатой передачей 72 и ведущей шестерней 124 на проксимальном конце 1204 проксимального участка 1202 ведущего валика. Как дополнительно поясняется ниже, редукторный узел 200 обеспечивает пользователя через рычаг 20 прошивки обратной связью по срабатыванию и усилию нагрузки концевого эффектора 12. Кроме того, пользователь может обеспечивать подачу мощности в систему через редукторный узел 200 для поддержки срабатывания концевого эффектора 12.
В показанном варианте осуществления рычаг 20 прошивки содержит две детали: основной корпусной участок 202 и укрепляющий участок 204. Основной корпусной участок 202 может быть выполнен, например, из пластика, и укрепляющий участок 204 может быть выполнен из более жесткого материала, например, металла. В показанном варианте осуществления укрепляющий участок 204 прилегает к основному корпусному участку 202, но, в соответствии с другими вариантами осуществления, укрепляющий участок 204 может быть расположен внутри основного корпусного участка 202. Шарнирный палец 207 можно вставлять сквозь отверстия в деталях 202, 204 рычага прошивки и может быть точкой, относительно которой поворачивается рычаг 20 прошивки. Кроме того, пружина 222 может оттягивать рычаг 20 прошивки в направлении поворота против часовой стрелки. Пружина 222 может иметь дистальный конец, подсоединенный к штырьку 224, который подсоединен к деталям 202, 204 рычага 20 прошивки. Проксимальный конец пружины 222 может быть присоединен к одной из внешних нижних боковин 59, 60 рукоятки.
В показанном варианте осуществления как основной корпусной участок 202, так и укрепляющий участок 204 содержат зубчатые участки 206, 208 (соответственно) на их верхних торцевых участках. Зубчатые участки 206, 208 находятся в зацеплении с шестерней в редукторном узле 200, как поясняется ниже, для приведения в движение главного ведущего вала 48 и для обеспечения пользователя обратной связью по степени срабатывания концевого эффектора 12.
Редукторный узел 200 может содержать, как показано в представленном варианте осуществления, шесть (6) шестерен. Первая шестерня 210 редукторного узла 200 находится в зацеплении с зубчатыми участками 206, 208 рычага 20 прошивки. Кроме того, первая шестерня 210 находится в зацеплении со второй шестерней 212 меньшего размера, при этом вторая шестерня 212 меньшего размера является соосной с третьей шестерней 214 большего размера. Третья шестерня 214 находится в зацеплении с четвертой шестерней 216 меньшего размера, при этом четвертая шестерня меньшего размера является соосной с пятой шестерней 218. Пятая шестерня 218 является 90° конической шестерней, которая находится в зацеплениии с сопряженной 90° конической шестерней 220 (лучше всего показанной на фигуре 22), которая соединена с ведущей шестерней 124, которая приводит в движение главный ведущий вал 48.
Во время работы, когда пользователь отводит назад рычаг 20 прошивки, датчик (не показан) включается, вследствие чего в электродвигатель 65 может быть подан сигнал на вращение с силой сигнала, пропорциональной величине усилия, с которым оперирующий хирург отводит назад рычаг 20 прошивки. Тем самым, электродвигатель 65 приводится во вращение с частотой, пропорциональной сигналу от датчика. Датчик может располагаться в рукоятке 6 так, что датчик испытывает нажим, когда отводят назад рычаг 20 прошивки. Кроме того, вместо пропорционального датчика можно применить двоичный датчик.
Вращение электродвигателя 65 вызывает вращение конических шестерен 66, 70 и, тем самым, вызывает вращение планетарной зубчатой передачи 72, что приводит, через ведущий вал 76, во вращение зубчатый венец 122. Зубчатый венец 122 находится в зацеплении с ведущей шестерней 124, которая соединена с проксимальным участком 1202 ведущего вала. Следовательно, вращение ведущей шестерни 124 приводит во вращение участок 1202 ведущего вала, которое передается, посредством шарнирно-поворотного сочленения 1220 ведущего вала, дистальный участок 1210 ведущего вала, который передает вращение на шпиндель 36 через шестерни 1216 и 56 для приведения в исполнение операцию отрезания/сшивания скобками концевым эффектором 12.
Переднее вращение ведущей шестерни 124 в свою очередь вызывает вращение конической шестерни 220, что приводит, посредством остальных шестерен редукторного узла 200, во вращение первую шестерню 210. Первая шестерня 210 находится в зацеплении с зубчатыми участками 206, 208 рычага 20 прошивки и, тем самым, вынуждает рычаг 20 прошивки поворачиваться против часовой стрелки, когда электродвигатель 65 обеспечивает продвижение вперед концевого эффектора 12 (и поворачиваться по часовой стрелке, когда электродвигатель 65 вращается в реверсном направлении для отвода концевого эффектора 12). При этом пользователь воспринимает обратную связь по степени срабатывания концевого эффектора 12 через захват пользователем рычага 20 прошивки. Следовательно, когда пользователь будет отводить назад рычаг 20 прошивки, он будет ощущать сопротивление, связанное с усилием нагрузки, действующим на концевой эффектор 12, и, в частности, с частотой правого вращения электродвигателя 65. Аналогично, когда оперирующий хирург отпускает рычаг 20 прошивки после операции отрезания/прошивания скобками, чтобы он мог вернуться в его исходное положение, пользователь будет испытывать усилие поворота по часовой стрелке со стороны рычага 20 прошивки, которое, в общем, пропорционально частоте реверсного вращения электродвигателя 65. Однако из дальнейшего описания очевидно, что специфическую и новую конструкцию шарнирно-поворачивающейся рукоятки в соответствии с настоящим изобретением можно эффективно применять в связи с множеством других эндоскопических аппаратов с приводом от двигателя, независимо от конкретной конфигурации рукоятки и/или способа передачи мощности в узел ведущего валика. Соответственно, охрана, предоставляемая различным вариантам осуществления настоящего изобретения, не должна ограничиваться конкретной конструктивной схемой электродвигателя/рукоятки, представленной в настоящем описания.
Из вышеприведенного описания с очевидностью следует, что различные варианты осуществления настоящего изобретения отражают многочисленные улучшения по сравнению с прежними эндоскопическими аппаратами. В частности, различные варианты осуществления настоящего изобретения позволяют хирургу или врачу эффективно располагать рукояточный участок аппарата относительно другого участка аппарата, который введен в пациента, таким образом, что рукоятка находится в эргономически более удобном положении, и положение рукоятки не обусловлено положением концевого эффектора.
Любые патенты, публикации или другие приведенные в описании данные, целиком или частично, которые упомянуты как включенные в настоящее описание путем отсылки, включены в настоящее описание только в таких пределах, в которых включенные данные не противоречат существующим определениям, формулировкам или другим данным, представленным в настоящем документе. По существу, сведения, приведенные в явном виде в настоящем описании, заменяют собой любые противоречащие данные, включенные в настоящее описание путем отсылки.
Изобретение, предполагаемое к охране, нельзя толковать как ограниченное конкретными описанными вариантами осуществления. Поэтому варианты осуществления следует считать наглядными, а не ограничивающими. Другими специалистами могут быть созданы варианты и внесены изменения без выхода за пределы существа настоящего изобретения. Соответственно, прямо предполагается, что настоящим документом должны охватываться все такие эквиваленты, варианты и изменения, которые находятся в пределах существа и объема настоящего изобретения, определенных формулой изобретения.
Изобретение относится к медицине. Хирургический аппарат содержат концевой эффектор, который выполнен с размером для введения через троакар. Узел удлиненного стержня соединен с концевым эффектором и управляющей рукояткой. Узел удлиненного стержня имеет дистальный участок, который примыкает к упомянутому концевому эффектору, для введения в троакар. Узел удлиненного стержня дополнительно имеет проксимальный участок, который удален от дистального участка настолько, что проксимальный участок выступает из троакара, когда концевой эффектор и дистальный участок введены через троакар. Управляющая рукоятка присоединена с возможностью шарнирного поворота к проксимальному участку упомянутого узла удлиненного стержня. В результате хирург имеет возможность перемещения рукояточного участка в эргономически более удобное положение при проведении эндоскопической процедуры. 2 н. и 20 з.п. ф-лы, 24 ил.
1. Хирургический аппарат, содержащий: концевой эффектор, выполненный с размером для введения через троакар;
узел удлиненного стержня, соединенный с упомянутым концевым эффектором, при этом упомянутый узел удлиненного стержня имеет дистальный участок, примыкающий к упомянутому концевому эффектору, для введения в троакар вместе с упомянутым концевым эффектором и проксимальный участок, удаленный от упомянутого дистального участка настолько, что упомянутый проксимальный участок выступает из троакара, когда концевой эффектор и дистальный участок введены через троакар;
управляющую рукоятку, присоединенную к упомянутому проксимальному участку узла удлиненного стержня с возможностью поперечного шарнирного поворота относительно дистального участка узла удлиненного стержня; и
нажимной кнопочный узел, взаимодействующий с указанным узлом удлиненного стержня и управляющей рукояткой для избирательного блокирования управляющей рукоятки в заданном положении относительно узла удлиненного стержня, при этом нажимной кнопочный узел содержит нажимной кнопочный участок, доступный для пользователя, и систему фиксации, взаимодействующую с упомянутым узлом удлиненного стержня и управляющей рукояткой для избирательной фиксации упомянутой управляющей рукоятки в заданных положениях относительно упомянутого узла удлиненного стержня в ответ на воздействие пользователем на нажимной кнопочный участок.
2. Хирургический аппарат по п.1, в котором упомянутый узел удлиненного стержня содержит:
проксимальный сегмент стержня, имеющий первый дистальный конец и первый проксимальный конец, при этом упомянутый первый проксимальный конец соединен с упомянутой управляющей рукояткой;
дистальный сегмент стержня, имеющий второй дистальный концевой участок, соединенный с упомянутым концевым эффектором, и второй проксимальный концевой участок, выполненный с размером для выступания из троакара, когда упомянутый концевой эффектор введен через троакар; и
узел шарнирно-поворотного сочленения, присоединенный к упомянутому первому дистальному концу упомянутого проксимального сегмента стержня и упомянутому второму проксимальному концевому участку упомянутого дистального сегмента стержня.
3. Хирургический аппарат по п.2, в котором упомянутый проксимальный сегмент стержня соединен с возможностью поворота с упомянутой управляющей рукояткой для избирательного поворота относительно упомянутой управляющей рукоятки.
4. Хирургический аппарат по п.2, в котором упомянутый узел шарнирно-поворотного сочленения содержит:
первую верхнюю петлю, выступающую из упомянутого дистального конца упомянутого проксимального сегмента стержня;
первую нижнюю петлю, выступающую из упомянутого дистального конца упомянутого проксимального сегмента стержня на расстоянии от упомянутой первой верхней петли;
вторую верхнюю петлю, выступающую из упомянутого второго проксимального конца упомянутого дистального сегмента стержня;
вторую нижнюю петлю, выступающую из упомянутого второго проксимального конца упомянутого дистального сегмента стержня на расстоянии от упомянутой второй верхней петли;
верхнее двухшарнирное соединительное звено, выполненное с размером для перекрывания расстояния между упомянутыми первой и второй верхними петлями, при этом упомянутое верхнее двухшарнирное соединительное звено имеет первый верхний палец, соединенный с возможностью поворота с упомянутой первой верхней петлей, и второй верхний шарнирный палец, соединенный с возможностью поворота с упомянутой второй верхней петлей; и
нижнее двухшарнирное соединительное звено, выполненное с размером для перекрывания расстояния между упомянутыми первой и второй нижними петлями, при этом упомянутое нижнее двухшарнирное соединительное звено имеет первый нижний палец, соединенный с возможностью поворота с упомянутой первой нижней петлей, и второй нижний палец, соединенный с возможностью поворота с упомянутой второй нижней петлей.
5. Хирургический аппарат по п.1, дополнительно содержащий:
вращающийся узел ведущего вала, установленный в упомянутом узле удлиненного стержня, при этом упомянутый вращающийся узел ведущего вала содержит:
дистальный участок ведущего вала, соединенный с возможностью функционирования с ходовым шпинделем в упомянутом концевом эффекторе;
проксимальный участок ведущего вала, соединенный с возможностью функционирования с электродвигателем, установленным в упомянутой управляющей рукоятке; и
шарнирно-поворотное сочленение ведущего вала, присоединенное между упомянутым дистальным участком ведущего вала и упомянутым проксимальным участком ведущего вала для создания возможности шарнирного поворота упомянутого проксимального участка ведущего вала относительно упомянутого дистального участка ведущего вала, когда упомянутую рукоятку шарнирно поворачивают относительно упомянутого узла удлиненного стержня.
6. Хирургический аппарат по п.5, в котором упомянутое шарнирно-поворотное сочленение ведущего вала содержит универсальный шарнир.
7. Хирургический аппарат по п.5, в котором упомянутое шарнирно-поворотное сочленение ведущего вала содержит торсионный трос.
8. Хирургический аппарат по п.5, в котором упомянутое шарнирно-поворотное сочленение ведущего вала содержит:
центральную коническую шестерню, установленную с возможностью вращения между проксимальным концом упомянутого дистального участка ведущего вала и дистальным концом упомянутого проксимального участка ведущего вала;
первую дистальную коническую шестерню, присоединенную к упомянутому проксимальному концу упомянутого дистального участка ведущего вала и находящуюся в зацеплении с упомянутой центральной конической шестерней; и
первую проксимальную коническую шестерню, присоединенную к упомянутому дистальному концу упомянутого проксимального участка ведущего вала и находящуюся в зацеплении с упомянутой центральной конической шестерней.
9. Хирургический аппарат по п.2, в котором упомянутый узел удлиненного стержня имеет ось удлиненного стержня, и при этом упомянутое шарнирно-поворотное сочленение конструктивно выполнено для создания возможности поворота упомянутого дистального сегмента замыкающей трубки вокруг, по меньшей мере, одной оси поворота, которая, по существу, поперечна упомянутой оси удлиненного стержня, относительно упомянутого проксимального сегмента стержня.
10. Хирургический аппарат по п.9, в котором упомянутый первый верхний палец и упомянутый первый нижний палец расположены соосно для образования первой оси поворота, которая, по существу, поперечна упомянутой оси удлиненного стержня, и при этом второй верхний палец и упомянутый второй нижний палец расположены соосно для образования второй оси поворота, которая, по существу, поперечна упомянутой оси удлиненного стержня.
11. Хирургический аппарат по п.2, дополнительно содержащий:
дистальный участок ведущего вала, соединенный с возможностью функционирования с ходовым шпинделем в упомянутом концевом эффекторе и установленный с возможностью функционирования в упомянутом дистальном сегменте стержня;
проксимальный участок ведущего вала, соединенный с возможностью функционирования с электродвигателем, установленным в упомянутой управляющей рукоятке, и установленный с возможностью функционирования в упомянутом проксимальном сегменте стержня; и
шарнирно-поворотное сочленение ведущего вала, присоединенное между упомянутым дистальным участком ведущего вала и упомянутым проксимальным участком ведущего вала для создания возможности шарнирного поворота упомянутого проксимального участка ведущего вала относительно упомянутого дистального участка ведущего вала, когда упомянутую управляющую рукоятку шарнирно поворачивают относительно упомянутого дистального сегмента стержня, при этом упомянутое шарнирно-поворотное сочленение ведущего вала расположено в упомянутом узле шарнирно-поворотного сочленения, соединяющем упомянутый проксимальный сегмент стержня с упомянутым дистальным сегментом стержня.
12. Хирургический аппарат по п.11, дополнительно содержащий:
проксимальный сегмент несущей трубки, прикрепленный к упомянутой управляющей рукоятке и установленный в упомянутом проксимальном сегменте стержня, при этом упомянутый проксимальный сегмент несущей трубки служит опорой для установки в нем с возможностью функционирования участка упомянутого проксимального участка ведущего вала; и
дистальный сегмент несущей трубки, соединенный с возможностью поворота с упомянутым проксимальным сегментом несущей трубки, и установленный в упомянутый дистальный сегмент стержня, и присоединенный к упомянутому концевому эффектору, при этом упомянутый дистальный сегмент несущей трубки служит опорой для установки в нем с возможностью функционирования упомянутого дистального участка ведущего вала.
13. Хирургический аппарат по п.12, в котором упомянутое шарнирно-поворотное сочленение ведущего вала содержит:
центральную коническую шестерню, присоединенную с возможностью вращения к дистальному концу упомянутого проксимального сегмента несущей трубки и установленную между проксимальным концом упомянутого дистального участка ведущего вала и дистальным концом упомянутого проксимального участка ведущего вала;
первую дистальную коническую шестерню, присоединенную к упомянутому проксимальному концу упомянутого дистального участка ведущего вала и находящуюся в зацеплении с упомянутой центральной конической шестерней; и
первую проксимальную коническую шестерню, присоединенную к упомянутому дистальному концу упомянутого проксимального участка ведущего вала и находящуюся в зацеплении с упомянутой центральной конической шестерней.
14. Хирургический аппарат по п.6, в котором упомянутый универсальный шарнир содержит:
проксимальный вильчатый элемент, присоединенный к дистальному концу упомянутого проксимального участка ведущего вала;
дистальный вильчатый элемент, присоединенный к проксимальному концу упомянутого дистального участка ведущего вала; и
центральную соединительную коробку, соединенную с возможностью поворота с упомянутыми проксимальным и дистальным вильчатыми элементами.
15. Хирургический аппарат по п.14, в котором упомянутая центральная соединительная коробка соединена на шарнирных пальцах с упомянутым проксимальным вильчатым элементом для поворотного перемещения вокруг проксимальной оси поворота, которая, по существу, поперечна оси удлиненного стержня, и при этом упомянутая центральная соединительная коробка соединена на шарнирных пальцах с упомянутым дистальным вильчатым элементом для поворотного перемещения вокруг дистальной оси поворота, которая, по существу, поперечна упомянутой оси удлиненного стержня.
16. Хирургический аппарат по п.15, в котором упомянутая проксимальная ось поворота, по существу, поперечна упомянутой дистальной оси поворота.
17. Хирургический аппарат по п.1, в котором упомянутый
нажимной кнопочный узел установлен с возможностью перемещения в корпусе, установленном на управляющей рукоятке, и содержит:
вильчатый участок, соединенный с упомянутым нажимным кнопочным участком, при этом упомянутый вильчатый участок служит опорой для установки в нем упомянутого проксимального конца упомянутого проксимального сегмента стержня, упомянутый проксимальный конец упомянутого проксимального сегмента стержня служит опорой для установки в нем упомянутого проксимального сегмента несущей трубки, упомянутый вильчатый участок содержит первое зубчатое колесо, закрепленное на нем;
тросовый барабанчик, установленный с возможностью поворота в упомянутом проксимальном сегменте несущей трубки, установленном в упомянутом проксимальном конце упомянутого проксимального сегмента стержня, установленного в упомянутом вильчатом участке, при этом упомянутый тросовый барабанчик содержит второе зубчатое колесо, закрепленное на нем, для избирательного зацепления с упомянутым первым зубчатым колесом;
правый натяжной трос, прикрепленный к упомянутому тросовому барабанчику и правой стороне проксимального конца упомянутого дистального несущего сегмента;
левый натяжной трос, прикрепленный к упомянутому тросовому барабанчику и левой стороне упомянутого проксимального конца упомянутого дистального несущего сегмента; и
поджимное приспособление между упомянутым корпусом и упомянутым нажимным кнопочным узлом для поджима упомянутого первого зубчатого колеса в зацепление с упомянутым вторым зубчатым колесом, когда упомянутая нажимная кнопка не задействована, и для предоставления возможности расцепления упомянутого второго зубчатого колеса с упомянутым первым зубчатым колесом при приложении приводящего в действие усилия к упомянутому нажимному кнопочному участку.
18. Хирургический аппарат, содержащий:
концевой эффектор, выполненный с размером для введения через троакар;
управляющую рукоятку, служащую опорой для установки в ней с возможностью функционирования, по меньшей мере, одного приводного электродвигателя;
проксимальный полый сегмент стержня, имеющий первый проксимальный конец, присоединенный с возможностью поворота к упомянутой управляющей рукоятке для избирательного поворота вокруг оси удлиненного стержня, и первый дистальный конец;
дистальный полый сегмент стержня, имеющий второй дистальный концевой участок, соединенный с возможностью функционирования с упомянутым концевым эффектором для его избирательного приведения в действие осевым перемещением вдоль упомянутой оси удлиненного стержня, при этом упомянутый дистальный полый сегмент стержня имеет второй проксимальный концевой участок, выполненный с размером для выступания из троакара, когда упомянутый концевой эффектор введен через троакар;
первую верхнюю петлю, выступающую из упомянутого первого дистального конца упомянутого проксимального полого сегмента стержня;
первую нижнюю петлю, выступающую из упомянутого первого дистального конца упомянутого проксимального полого сегмента стержня на расстоянии от упомянутой первой верхней петли;
вторую верхнюю петлю, выступающую из упомянутого второго проксимального конца упомянутого дистального полого сегмента стержня;
вторую нижнюю петлю, выступающую из упомянутого второго проксимального конца упомянутого дистального полого сегмента стержня на расстоянии от упомянутой второй верхней петли;
верхнее двухшарнирное соединительное звено, выполненное с размером для перекрывания расстояния между упомянутыми первой и второй верхними петлями, при этом упомянутое верхнее двухшарнирное соединительное звено имеет первый верхний палец, соединенный с возможностью поворота с упомянутой первой верхней петлей, и второй верхний шарнирный палец, соединенный с возможностью поворота с упомянутой второй верхней петлей;
нижнее двухшарнирное соединительное звено, выполненное с размером для перекрывания расстояния между упомянутыми первой и второй нижними петлями, при этом упомянутое нижнее двухшарнирное соединительное звено имеет первый нижний палец, соединенный с возможностью поворота с упомянутой первой нижней петлей, и второй нижний палец, соединенный с возможностью поворота с упомянутой второй нижней петлей;
проксимальный несущий сегмент, прикрепленный к упомянутой управляющей рукоятке, и проходящий через упомянутый проксимальный полый сегмент стержня, и выступающий из его упомянутого первого дистального конца;
дистальный несущий сегмент, проходящий через упомянутый дистальный полый сегмент стержня и имеющий проксимальный конец, примыкающий к дистальному концу упомянутого проксимального несущего сегмента, при этом упомянутый дистальный несущий сегмент имеет дистальный конец, присоединенный к упомянутому концевому эффектору и закрепленный в упомянутом дистальном полом сегменте стержня так, что упомянутый дистальный полый сегмент стержня можно избирательно аксиально перемещать относительно упомянутого дистального несущего сегмента;
дистальный участок ведущего вала, установленный с возможностью функционирования в упомянутом дистальном несущем сегменте и соединенный с ходовым шпинделем в упомянутом концевом эффекторе;
проксимальный участок ведущего вала, соединенный с возможностью функционирования с каким-то одним из, по меньшей мере, одного упомянутого приводного электродвигателя в упомянутой управляющей рукоятке и установленный с возможностью функционирования в упомянутом проксимальном несущем сегменте; и
шарнирно-поворотное сочленение ведущего вала, присоединенное между упомянутым дистальным участком ведущего вала и упомянутым проксимальным участком ведущего вала, для создания возможности шарнирного поворота упомянутого проксимального участка ведущего вала относительно упомянутого дистального участка ведущего вала, когда упомянутую управляющую рукоятку шарнирно поворачивают относительно упомянутого дистального сегмента стержня.
19. Хирургический аппарат по п.18, в котором упомянутое шарнирно-поворотное сочленение ведущего вала содержит:
центральную коническую шестерню, присоединенную с возможностью вращения к дистальному концу упомянутого проксимального несущего сегмента и установленную между проксимальным концом упомянутого дистального участка ведущего вала и дистальным концом упомянутого проксимального участка ведущего вала;
первую дистальную коническую шестерню, присоединенную к упомянутому проксимальному концу упомянутого дистального участка ведущего вала и находящуюся в зацеплении с упомянутой центральной конической шестерней; и
первую проксимальную коническую шестерню, присоединенную к упомянутому дистальному концу упомянутого проксимального участка ведущего вала и находящуюся в зацеплении с упомянутой центральной конической шестерней.
20. Хирургический аппарат по п.18, в котором упомянутое шарнирно-поворотное сочленение ведущего вала содержит универсальный шарнир.
21. Хирургический аппарат по п.18, в котором упомянутое шарнирно-поворотное сочленение ведущего вала содержит торсионный трос.
22. Хирургический аппарат по п.18, дополнительно содержащий средство, закрепленное на упомянутом аппарате для избирательной фиксации упомянутого проксимального полого сегмента стержня в заданном положении относительно упомянутого дистального полого сегмента стержня.
| US 5040715 A, 20.08.1991 | |||
| ПОВОРОТНОЕ УСТРОЙСТВО | 1993 |
|
RU2098025C1 |
| Хирургический сшивающий аппарат | 1988 |
|
SU1554899A1 |
| US 4566620 A, 28.01.1986 | |||
| US 5395030 A, 07.03.1995 | |||
| US 5662258 A, 02.09.1997 | |||
| US 5816471 A, 06.10.1998 | |||
| УПРАВЛЯЕМЫЙ ПОВОРОТНЫЙ МЕХАНИЗМ | 2000 |
|
RU2181566C2 |
| ПОЛОГОЕ ПОВОРОТНОЕ УСТРОЙСТВО | 1997 |
|
RU2144791C1 |
| US 4641657 A, 10.02.1987. | |||

