ОБЛАСТЬ ПРИМЕНЕНИЯ ИЗОБРЕТЕНИЯ
[0001] Изобретение относится к скважинным устройствам и, в особенности, к устройству для каротажа скважины, способному работать в стволах скважин с широким диапазоном размеров.
ОПИСАНИЕ УРОВНЯ ТЕХНИКИ
[0002] Скважины обычно бурят в земных породах для получения текучих сред из одной или более вскрытых пород. Текучие среды включают воду и углеводороды, такие как нефть и газ. Скважины также бурят в земных породах для размещения отработанных текучих сред в выбранных породах, пройденных стволом скважины. Стволы скважин обычно облицовывают трубчатой структурой, в целом называемой обсадной колонной. Обсадная колонна обычно стальная, хотя могут использоваться другие металлы и композиты, такие как стекловолокно. Кольцевой зазор между обсадной колонной и стволом скважины заполняют закрепляющим материалом, таким как цемент, чтобы гидравлически изолировать различные породы, пройденные скважиной и обсадной колонной.
[0003] Стенка обсадной трубы может истончаться. Коррозия может появляться и внутри, и снаружи обсадной трубы. Механическое трение от штоков насосов и т.п.может изнашивать обсадную трубу изнутри. Износ обсадной трубы может повлиять на способность обсадной трубы обеспечить механическую прочность ствола скважины. Дополнительно или альтернативно, различные проблемы при закреплении - такие как несовершенное сцепление, неполное заполнение кольцевого зазора между обсадной трубой и цементом и/или коррозию/износ обсадной трубы - могут подвергать риску гидравлическую изоляцию обсадной трубы.
[0004] Измерения одного или более параметров скважины, представляющих интерес, полезны в течение срока службы скважины, на протяжении от времени ее бурения до времени консервации. Поэтому экономически и функционально желательно работать с оборудованием для измерения различных параметров скважины, используя множество систем для обследования скважины или «каротажа». Такие каротажные системы могут содержать многожильный каротажный кабель, одножильный каротажный кабель и т.д.
[0005] Окружающая скважину среда обычно сурова в смысле температуры, давления и шероховатости стенок и может негативно сказаться на сигнале любой действующей в ней каротажной системы. Более конкретно, на измерения параметров ствола скважины могут отрицательно повлиять суровые условия в скважине. Так как изменения температуры и давления в скважине обычно непредсказуемы, крайне желательна непрерывная, в режиме реального времени, калибровка системы внутри скважины. Обычно скважинные устройства опускают через внутренний диаметр обсадных труб для различных целей. Некоторые устройства снабжаются энергией через электрические провода, в то время как другие устройства питаются от батарей. Скважинные устройства могут содержать некоторое число модулей с длиной вплоть до тридцати футов (девяти метров) или даже более.
[0006] Пробуриваемые скважины и предназначенные для них обсадные трубы имеют широкий диапазон диаметров. Внутренний диаметр обсадной трубы может также варьироваться благодаря коррозии, износу или другим препятствиям. Может быть желательно, чтобы скважинное устройство работало в скважинах с различным диаметром.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0007] Далее представлено изложение сущности изобретения, чтобы обеспечить базовое понимание некоторых аспектов обсуждаемых здесь систем и/или способов. Это изложение не является подробным обзором обсуждаемых здесь систем и/или способов. Оно не предназначено для определения ключевых/критических элементов или указания диапазона таких систем и/или способов. Его единственная цель - представить в упрощенной форме некоторые концепции в качестве введения к более подробному описанию, которое представлено ниже.
[0008] Один аспект изобретения обеспечивает каротажное устройство, предназначенное для каротажа скважины и содержащее корпус, ориентированный вдоль продольной оси, и центрирующий узел, который располагает корпус по существу в центре скважины и содержит первый ползун и группу присоединенных к нему центрирующих кронштейнов. Первый ползун выполнен с возможностью скольжения вдоль продольной оси с обеспечением выборочного управления радиальным выдвижением указанных центрирующих кронштейнов. Каротажное устройство, кроме того, содержит сканирующую головку, которая вращает сканирующие датчики аксиально внутри ствола скважины вокруг продольной оси и которая содержит второй ползун и соединительные кронштейны, соединяющие второй ползун с указанными сканирующими датчиками. Второй ползун выполнен с возможностью скольжения вдоль продольной оси с обеспечением выборочного управления радиальным выдвижением указанных датчиков.
[0009] Другой аспект изобретения обеспечивает каротажное устройство, предназначенное для каротажа скважины и содержащее корпус, ориентированный вдоль продольной оси, и центрирующий узел, который располагает корпус по существу в центре скважины и содержит центрирующие кронштейны, выполненные с возможностью радиального выдвижения в наружном направлении от продольной оси на первый диаметр. Каротажное устройство, кроме того, содержит сканирующую головку, которая вращает сканирующие датчики аксиально внутри скважины вокруг продольной оси и содержит соединительные кронштейны, соединенные с указанными сканирующими датчиками, так что сканирующие датчики могут радиально выдвигаться в наружном направлении от продольной оси на второй диаметр. Каротажное устройство, кроме того, содержит выдвигающий узел, выполненный с возможностью по существу одновременного управления радиальным выдвижением центрирующих кронштейнов и указанных датчиков.
[0010] Другой аспект изобретения обеспечивает каротажное устройство, предназначенное для каротажа скважины и содержащее центрирующий узел, который располагает корпус по существу в центре скважины и содержит первый ползун и центрирующие кронштейны, присоединенные к нему. Первый ползун выполнен с возможностью скольжения вдоль продольной оси с обеспечением выборочного управления радиальным выдвижением указанных центрирующих кронштейнов. Каротажное устройство, кроме того, содержит сканирующую головку, которая вращает сканирующие датчики аксиально внутри скважины вокруг продольной оси и которая содержит второй ползун, соединенный с указанными сканирующими датчиками, причем второй ползун выполнен с возможностью скольжения вдоль продольной оси с обеспечением выборочного управления радиальным выдвижением указанных датчиков. Каротажное устройство, кроме того, содержит главный вал, который присоединен к обоим ползунам, первому и второму, и выполнен с возможностью линейного перемещения вдоль продольной оси для обеспечения скольжения обоих ползунов, первого и второго, для одновременного управления радиальным выдвижением центрирующих кронштейнов и указанных датчиков.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0011] Вышеизложенные и другие аспекты изобретения будут очевидны специалистам в области, к которой относится изобретение, при чтении следующего описания со ссылкой на сопровождающие чертежи, где
[0012] фиг.1 является видом сбоку примерного каротажного устройства, расположенного внутри примерного ствола скважины;
[0013] фиг.2 является продольным разрезом примерного каротажного устройства, показанного на фиг.1, изображенного в первом примерном положении;
[0014] фиг.3 аналогична фиг.2, но показывает примерное каротажное устройство во втором примерном положении.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0015] Примерные варианты выполнения, которые включают один или более аспектов изобретения, описаны и проиллюстрированы на чертежах. Эти проиллюстрированные примеры не предназначены для ограничения изобретения. Например, один или более аспектов изобретения могут быть использованы в других вариантах выполнения и даже в устройствах других типов. Кроме того, определенная терминология используется здесь только для удобства и не должна служить ограничением изобретения. Далее, на чертежах одинаковые номера позиций используются для обозначения одинаковых элементов.
[0016] Для целей данного описания термин "устройство" является очень общим и может быть применен к любому устройству, направляемому в скважину для выполнения любой операции. В частности, скважинное устройство может использоваться для описания различных аппаратов и приборов для выполнения измерений, обслуживания или задач, включающих, но не ограниченных этим, восстановление трубы, оценку породы, измерение направлений и/или капитальный ремонт.
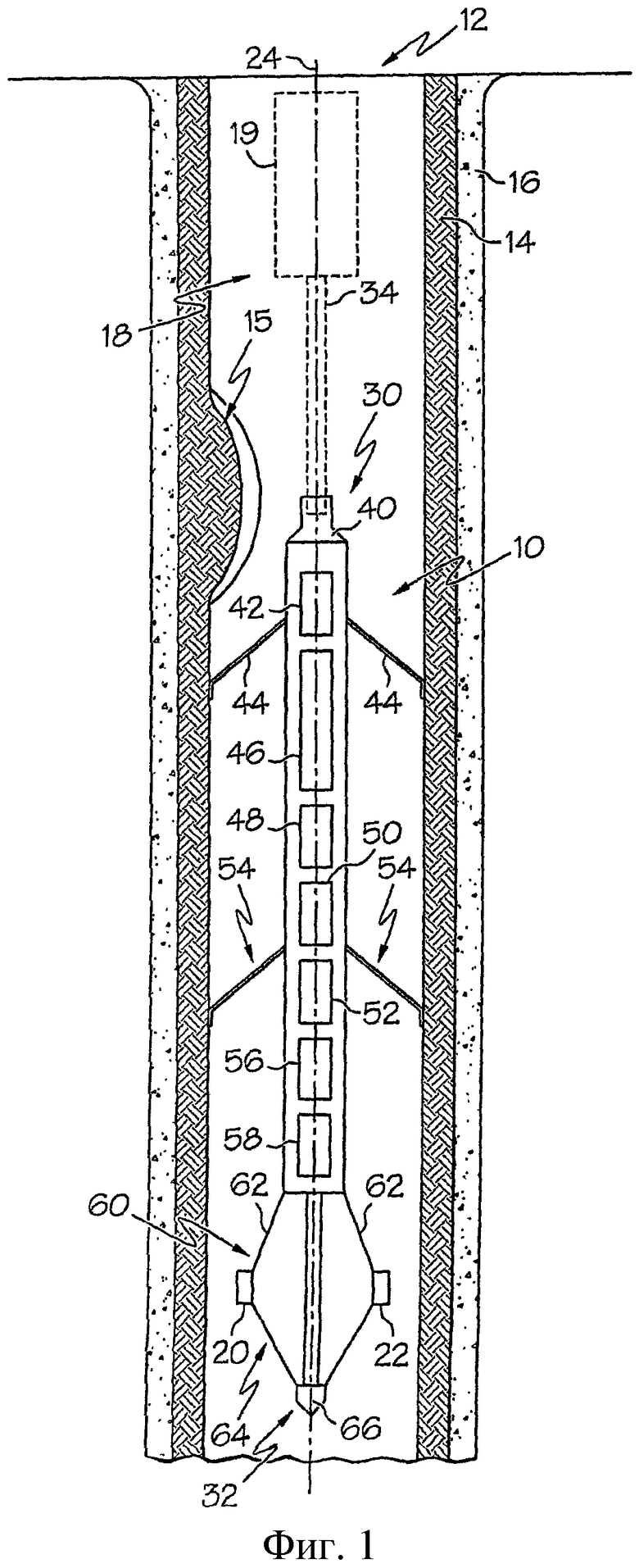
[0017] На фиг.1 проиллюстрирован примерный вариант выполнения каротажного устройства 10. Каротажное устройство 10, выполненное с возможностью использования в скважине 12 в земле, которая может быть облицована обсадной трубой 14, укрепленной различными закрепляющими материалами 16, такими как цемент и т.п. Каротажное устройство 10 может быть частью цепочки 18 устройств, содержащей один или более скважинных устройств 19, соединенных обычно соединителями или кабелями, которые могут содержать кабели питания и/или кабели для передачи данных. Если часть каротажного устройства 10 выполнена с возможностью вращения внутри скважины 12, это каротажное устройство 10 может быть крайним инструментом цепочки 18 устройств, хотя оно может также быть расположено по-разному внутри цепочки 18, с соответствующей опорной конструкцией. Предполагается, что в качестве части цепочки 18 устройств могут также быть предоставлены различные другие конструкции.
[0018] Цепочка 18 устройств обычно развертывается в направлении центра обсадной колонны 14, как, например, вдоль центральной оси 24 обсадной колонны 14. Однако по различным причинам, известным специалистам в данной области, часто желательно располагать датчики 20, 22, такие как ультразвуковые преобразователи, на различных расстояниях от центральной оси 24. Например, как показано на чертежах, датчики 20, 22 каротажного устройства 10 могут быть размещены смежно со стенкой обсадной трубы 14 (т.е. расположены на относительно большем радиальном удалении относительно центральной оси 24). Датчики 20, 22 могут также быть размещены вдали от стенки обсадной трубы 14 (т.е. расположены на относительно меньшем радиальном удалении относительно центральной оси 24), чтобы приспособиться к изменениям диаметра ствола скважины 12, таким как сужение 15 и т.п.Таким образом, устройство 10 может избежать застревания на сужении 15, что, в противном случае, могло бы повлечь за собой дальнейшие расходы по удалению, дорогостоящее время бурения и/или проблемы с окружающей средой. Каротажное устройство 10 может выборочно регулироваться для обеспечения требуемых расстояний смещения для датчиков, как показано ниже.
[0019] Каротажное устройство 10 может содержать первый конец 30 и второй конец 32, расположенный глубже в скважине 12. Как принято здесь, термины "первый" и "второй" используются только для удобства. Первый и второй концы 30, 32 могут каждый содержать соединительное приспособление (например, монтажные соединения), предназначенное для соединения каротажного устройства 10 с другим монтажным стыком, скважинным устройством и т.д. Соединительное приспособление может содержать кабельную структуру и/или охватываемое или охватывающее соединительное приспособление, такое как шпоночные и/или резьбовые соединения (не показаны). Такое приспособление может содержать различные конфигурации, содержащие различные другие соединительные приспособления, известные специалистам в данной области.
[0020] Дополнительно, каротажное устройство 10 может содержать, по меньшей мере, один электрический соединитель. Например, по меньшей мере один электрический соединитель 34 может быть расположен на одном из концов 30, 32 для подведения электрического тока к каротажному устройству 10 и/или к другому устройству в цепочке 18 устройств. Электрический соединитель (соединители) 34 может быть выполнен с возможностью соединения с различными соответствующими электрическими и/или механическими приспособлениями для передачи электрического тока. Электрический ток может обеспечить различные цифровые и/или аналоговые сигналы, такие как электроэнергия, связь и т.д. между различными скважинными устройствами, соединителями и управляющим устройством (не показано), расположенным снаружи скважины 12. В дополнение к этому или альтернативно, различные другие сигналы для обеспечения энергией, связью и т.д. могут быть созданы любым другим устройством, включая оптические сигналы (например, через оптоволоконный кабель и т.д.), беспроводные сигналы (например, электромагнитное излучение и т.д.) и т.п. Любое из сигнальных устройств или все они, такие как провод(а), могут быть защищены, экранированы и т.д. различными способами, такими как герметичная гибкая трубка или т.п. Соединительное приспособление на любом из концов 30, 32 может также содержать различные герметизирующие приспособления или т.п.
[0021] Одна примерная конструкция каротажного устройства 10 обсуждена ниже. Нужно понимать, что каротажное устройство 10 для ясности изображено на фиг.1 схематически. Может быть включено больше или меньше элементов, они могут быть расположены различным образом, могут иметь различные геометрические формы и/или размеры и т.д.
[0022] Если начать с первого конца 30 устройства и двигаться вниз, первый показанный на схеме блок является разъемом 40 устройства для присоединения к остальной части цепочки 18 устройств. Разъем 40 может содержать соединительное устройство, описываемое здесь, и/или электрический соединитель (соединители) 34 и т.д. Из-за относительно высокой потребляемой мощности вращающих и свертывающих двигателей (или даже двигателей или исполнительных устройств разных других типов, таких как гидравлические или пневматические двигатели или исполнительные устройства и т.д.), используемых в каротажном устройстве 10, могут использоваться высоковольтные источники питания, такие как конфигурация двойного соединения или т.п. Например, из-за множества элементов для работы этого каротажного устройства 10 могут использоваться два отдельных источника энергии. Первый источник может быть коммуникационной шиной, которая также может использоваться для доставки низковольтной энергии к электронике многочисленных чувствительных элементов. Второй источник энергии может быть высоковольтной перемычкой от проводной линии, использующей конфигурацию двойного соединения для снабжения энергией вращающих и/или исполнительных двигателей.
[0023] Второй блок иллюстрирует вертлюг 42, который позволяет устройству 10 совершать некоторое вращение в скважине 12 без скручивания остальной части цепочки 18 устройств. Например, независимо от захватной способности любых центрирующих устройств, которые могут использоваться для стабилизации устройства 10, оно все же может понемногу вращаться в скважине 12 благодаря передаче крутящего момента от вращающейся части, расположенной ниже. Чтобы скомпенсировать хотя бы частично этот эффект, вертлюг 42 может быть снабжен кодирующим датчиком положения, что позволяет устройству 10 вращаться свободно от остальной цепочки 18 устройств, в то время как указанный датчик положения записывал бы относительное положение каротажного устройства 10 относительно других устройств (не показаны) в цепочке 18. Таким образом, данные от каротажного устройства 10 могут быть зарегистрированы с данными от других устройств в цепочке 18 устройств, на основе закодированной информации о положении.
[0024] Третий блок иллюстрирует верхнее центрирующее устройство 44, которое может содержать несколько выдвигаемых центрирующих кронштейнов. Верхнее центрирующее устройство 44 может использоваться для удержания каротажного устройства 10 в целом в центре скважины 12 (т.е. вдоль центральной оси 24), так что часть вращающегося датчика внизу не сталкивается со стенкой обсадной трубы 14. Верхнее центрирующее устройство 44 может также закреплять устройство в обсадной трубе 14 посредством захвата (не показан), который может быть расположен на концах одного или более центрирующих кронштейнов, с обеспечением подавления, например предотвращения, вращения устройства 10 вследствие силы противодействия вращающихся кронштейнов снизу, путем контакта с окружающей обсадной трубой 14 и передачи ей силы. Кронштейны устройства 44 могут также действовать вместе с нижними центрирующими кронштейнами для подавления, например предотвращения поворота устройства 10 относительно центральной оси 24 ствола 12 скважины. Кронштейны верхнего центрирующего устройства 44 могут быть упруго поджаты в наружном направлении (т.е. от продольной оси устройства) в направлении обсадной трубы и могут управляться вручную или даже автоматически.
[0025] Четвертый блок является корпусом 46 электроники, который может содержать некоторую или всю электронику, используемую для работы каротажного устройства 10. Например, электроника может содержать низковольтные источники питания для электроники и/или датчиков, источники питания для двигателей, логику управления двигателем, приводы датчиков положения (например, ориентации поворота, положения складного кронштейна, положения вертлюга и т.д.), компоненты связи, компоненты анализа, ультразвуковые генераторы, приемники, трансформаторы, усилители, телеметрия данных, управление данными и/или компоненты обработки данных. Также, особенно для усовершенствования, в электронную часть может быть включена память для более полной записи и исследования данных. Большое количество данных, природа сигналов и/или задействованные частоты могут сделать правильную обработку данных насыщенной задачей. Входящие сигналы могут иметь частоты, сгруппированные приблизительно в диапазоне 300-500 кГц, что означает, что электроника и/или программное обеспечение должны позволять точно и эффективно оцифровывать и обрабатывать полученное в результате большое количество данных, что необходимо выполнить.
[0026] В дополнение к этому или альтернативно, корпусом 46 электроники могут отслеживаться различные данные позиционирования, обеспечивая вывод точных данных. Например, сигналы от датчиков могут содержать положение сенсорной головки 60 по отношению к центральной оси 24 устройства, угловую ориентацию сенсорной головки 60 по отношению к корпусу устройства и/или угловую ориентацию устройства 10 по отношению к остальной части цепочки 18 устройств.
[0027] Пятый блок может иллюстрировать опорный элемент 48. Например, опорный элемент 48 может быть сенсорным узлом, который установлен напротив сплошного элемента корпуса с фиксированным интервалом и открыт для скважинной текучей среды. Этот датчик может периодически приводиться в движение точно так же, как измерительные датчики на вращающихся кронштейнах внизу, и благодаря фиксированному интервалу акустические свойства скважинной текучей среды могут быть определены и записаны для корректировки значений, полученных от основных датчиков. В другом примере опорный элемент 48 может иметь конфигурацию, описанную в патентной заявке США 2006/0262643, которая включена в настоящий документ посредством ссылки.
[0028] Шестой блок может иллюстрировать секцию 50 компенсации механического давления, используемую для уравновешивания давления двигателей, подшипников, электрических соединений и, возможно, датчиков в каротажном устройстве с давлением в скважине. Секция 50 компенсации давления может быть расположена над двигателями и исполнительными частями каротажного устройства 10.
[0029] Седьмой блок может иллюстрировать двигатель 52, такой как бесщеточный электродвигатель постоянного тока, который может быть выполнен с возможностью обеспечения линейного перемещения для складывания и выдвижения кронштейнов нижнего центрирующего узла 54. Например, двигатель 52 может использоваться для запуска линейной приводной системы и может содержать редуктор или т.п. В дополнение к этому или альтернативно предполагается, что для обеспечения линейного перемещения могут использоваться также исполнительные устройства или двигатели различного типа, такие как гидравлические или пневматические исполнительные устройства, двигатели или т.п. (не показаны).
[0030] Затем нижний центрирующий узел 54 может использоваться для центрирования каротажного устройства 10 в скважине (т.е. в целом вдоль центральной оси 24) и подавления, например предотвращения, его вращения и/или поворота в стволе скважины 12. Центрирующий узел 54 может содержать выдвигаемые кронштейны для взаимодействия со стенкой обсадной трубы 14. Кронштейны центрирующего узла 54 могут также крепить каротажное устройство 10 в обсадной трубе 14 посредством захвата (не показан). Центрирующий узел 54 может также быть присоединен к складывающимся кронштейнам вращающейся сенсорной головки 60 внизу таким образом, чтобы служить в качестве устройства для контроля внутренней поверхности скважины и отклонителя устройства от стенки скважины. Например, эта конструкция может поддерживать желательное расстояние между обсадной трубой 14 и вращающейся сенсорной головкой 60, так что если при вытягивании каротажного устройства 10 вверх в скважине 12 встретится сужение 15, центрирующий узел 54 сложит вращающуюся сенсорную головку 60 внутрь и в сторону от потенциального столкновения. Центрирующий узел 54 может содержать датчик положения для кронштейнов.
[0031] Далее, девятый блок может иллюстрировать второй двигатель 56, такой как бесщеточный двигатель постоянного тока, выполненный с возможностью вращения полностью выдвинутых кронштейнов вращающейся сенсорной головки 60 против сопротивления скважинной текучей среды. Таким образом, двигатель 56 может быть двигателем относительно высокой мощности и высокого вращающего момента, который может содержать подходящий редуктор. Двигатель 56 может, кроме того, содержать кодирующий датчик для записи положения поворота двигателя 56 и приводных элементов. Кроме того, или альтернативно, предполагается, что для создания вращательного движения также могут использоваться исполнительные устройства или двигатели различных типов, такие как гидравлические или пневматические исполнительные устройства, двигатели или т.п.(не показаны).
[0032] Десятый блок может иллюстрировать вращающееся электрическое соединение 58 или токосъемное контактное кольцо для создания перехода между верхним неподвижным корпусом устройства и нижними вращающимися элементами. Вращательное электрическое соединение 58 выполнено с возможностью передачи электрического тока между датчиками 20, 22 и по меньшей мере, одним электрическим соединителем 34 или электроникой 46 при вращении сенсорной головки 60. Вращательное электрическое соединение 58 может быть механическим и/или индукционным. Может применяться несколько вращательных электрических соединений 58, как например, по одному для каждого из датчиков. Например, вращательное электрическое соединение 58 может иметь относительно широкую полосу пропускания, порядка нескольких МГц или даже больше, благодаря природе передаваемых и отраженных сигналов. Вращательное электрическое соединение 58 может также иметь низкую взаимную наводку между соединениями, быть устойчивым к износу, ввиду требования 10000-20000 оборотов за исследование, быть способным выдерживать высокую температуру (например, выше, чем 150 градусов Цельсия) и высокое давление (например, больше, чем 15000 фунтов/кв. дюйм (100 000 кПа)), при которых работает каротажное устройство 10, и/или соответствовать геометрии корпуса устройства 10. Предполагаются и другие условия работы.
[0033] В одном примере вращательное электрическое соединение 58 может быть механическим устройством, таким как поставляется корпорацией IEC (TBVS-HT-.375), которое рассчитано на соответствующие температуру и давление, имеет 6 соединений, подходящие характеристики по ширине полосы пропускания и срок службы 120-200×10∧6 оборотов. В другом примере вращательное электрическое соединение 58 может быть индуктивным соединением. Например, индуктивное соединение может использовать коэффициент трансформации примерно 1:1 для передачи и приема сигнала, хотя предусмотрены различные другие конструкции. Соединение этого типа обеспечивает гибкость в размерах, имеет благоприятный высокочастотный отклик и является бесконтактным устройством, которому достаточно небольшого обслуживания для продления срока эксплуатации. Для повышения эффективности и/или минимизации взаимной наводки между отдельными соединениями может быть применен структурный анализ и/или анализ данных.
[0034] Далее, вращающаяся сенсорная головка 60 может содержать группу датчиков 20, 22, которые предназначены для излучения сигналов и приема отраженных сигналов для регистрации информационных данных об обсадной колонне 14. Могут быть использованы различные количества датчиков 20, 22. Каждый из датчиков 20, 22 может быть подсоединен к кронштейнам 62, снабженным проводами, для обеспечения энергией и передачи данных. Так как сопротивление жидкости на кронштейнах 62 непосредственно связано с их поперечным сечением, кронштейны 62 могут быть выполнены с уменьшенным поперечным сечением. К тому же, поскольку кронштейны 62 могут быть повреждены, подвергаясь воздействию текучей среды в скважине, их можно как электрически, так и механически защитить.
[0035] Датчики 20, 22 могут включать датчики различных типов, которые могут обеспечивать одностороннее или двухстороннее взаимодействие сигналов (т.е. передатчики, приемники или трансиверы). В одном примере датчики 20, 22 могут быть ультразвуковыми преобразователями, такими как датчики на частоту 500 кГц PZT Navy II, выполненные в виде пьезоэлектрических круглых дисков и сконфигурированные как трансиверы. Датчики 20, 22 могут быть однонаправленными, чтобы ограничить, т.е. минимизировать, распространяющиеся в обратном направлении волновые фронты, которые могут отражаться и интерферировать с измерениями. Чтобы создать требуемый волновой фронт, датчики 20, 22 могут выполнять также функции формирования различных пучков, отражающего наложения и/или поглощения.
[0036] Кроме влияния энергии и силы, вертикальная разрешающая способность зависит от скорости вращения сенсорной головки 60. Максимальное расстояние по вертикали, которое покрывается перед тем как датчик 20, 22 сенсорной головки 60 совершит повторное прохождение ствола скважины, определяется как вертикальная разрешающая способность и является функцией как скорости вращения, так и скорости регистрации. Когда устройство 10 вытягивают вверх в скважине 12 быстрее, сенсорная головка 60 должна вращаться быстрее, чтобы обеспечить заданную вертикальную разрешающую способность. В показанной конфигурации два датчика 20, 22 расположены напротив друг друга, хотя может быть предоставлено различное количество датчиков, что может замедлить скорость вращения, используемую для сбора данных. Например, возможна стандартная вертикальная разрешающая способность 3 дюйма (7,5 см) для вращения устройства с двумя датчиками при допустимом потреблении мощности и турбулентности текучей среды, поддерживая вертикальную скорость регистрации 30 фут/мин (1,5 м/сек).
[0037] Вращающаяся сенсорная головка 60 может быть присоединена к складному узлу 64, предназначенному для выборочного управления радиальным выдвижением датчиков 20, 22. В одном примере складной узел 64 может действовать для управления радиальным выдвижением датчиков 20, 22 от диаметра около 2 дюймов (5 см) до, по меньшей мере, около 10 дюймов (25 см) так, чтобы можно было работать в пределах разных размеров обсадных труб. Складной узел 64 может быть присоединен к нижнему центрирующему узлу 54 через демпфер. Нижняя часть устройства 10 (т.е. второй конец 32) может содержать концевой элемент 66, такой как передний конический элемент, или даже соединительное приспособление для присоединения к другому устройству или подобному приспособлению.
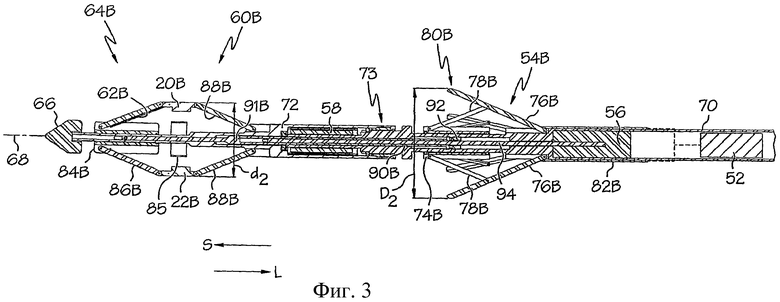
[0038] Со ссылкой на фиг.2-3 каротажное устройство 10 описано более подробно и проиллюстрировано в двух примерных положениях. При исследовании скважины может быть желательно расположить отдельные датчики 20, 22 на различных радиальных удалениях от центральной оси 24 скважины, так чтобы можно было работать в диапазоне диаметров скважины. Для удобства, радиальное удаление каждого датчика 20, 22, как описано здесь, взято по отношению к продольной оси 68, которая может также быть осью симметрии каротажного устройства 10, которая может быть коаксиальна центральной оси 24 скважины 12. Все же следует понимать, что радиальное удаление может быть взято по отношению к различным другим частям каротажного устройства 10. Также, для удобства, в номерах позиций на фиг.3 использована буква "В", чтобы обозначить тот же элемент в другом положении относительно фиг.2.
[0039] Каротажное устройство 10 содержит корпус, ориентированный вдоль продольной оси 68 (т.е., оси симметрии) устройства 10. Корпус может содержать верхнюю часть 70, которая обычно не вращается, и нижнюю часть 72, которая должна вращаться вместе с сенсорной головкой 60. Различные компоненты могут быть расположены внутри и/или между верхней и/или нижней частями 70, 72, такие как различные опоры 73 вращения (например, подшипники качения, подшипники скольжения), уплотнения, механические и/или электрические соединения, датчики и т.д. Каротажное устройство 10, кроме того, содержит центрирующий узел 54 (т.е. нижний центрирующий узел), который размещает части 70, 72 корпуса по существу в центре ствола скважины 12 (т.е. вдоль центральной оси 24). Центрирующий узел 54 содержит первый ползун 74 и группу центрирующих кронштейнов 76, присоединенных к нему. Центрирующие кронштейны 76 могут быть непосредственно или с помощью промежуточных элементов шарнирно присоединены к первому ползуну 74, как, например, управляющими кронштейнами 78 или т.п.Первый ползун 74 выполнен с возможностью скольжения в направлении вдоль продольной оси для выборочного управления радиальным выдвижением указанных центрирующих кронштейнов 76 относительно продольной оси 68 каротажного устройства 10. По меньшей мере часть центрирующих кронштейнов, например все, может содержать захватную часть 80, выполненную с возможностью захвата внутренней поверхности (т.е. стенки обсадной трубы) скважины 12.
[0040] Указанная группа центрирующих кронштейнов 76 может радиально выдвигаться в наружном направлении от продольной оси 68 (т.е. оси симметрии) до диаметра D. В одном примере все центрирующие кронштейны 76 могут выдвигаться до диаметра D, хотя некоторые могут выдвигаться до другого диаметра. В показанном примере центрирующие кронштейны 76 в целом расположены одинаково в радиальной схеме вокруг устройства 10, и в результате для удобства используется термин "диаметр". Тем не менее, различное количество центрирующих кронштейнов 76 может быть расположено по-разному. Первый ползун 74 выполнен с возможностью скольжения вдоль продольной оси 68 устройства 10 относительно верхней части 70 корпуса для выборочного управления радиальным раздвижением центрирующих кронштейнов 76. Например, благодаря шарнирному соединению между первым ползуном 74 и управляющими кронштейнами 78, а также шарнирному соединению между управляющими кронштейнами 78 и центрирующими кронштейнами 76, скользящее перемещение первого ползуна 74 будет либо увеличивать, либо уменьшать радиальное выдвижение центрирующих кронштейнов 76. Например, скользящее перемещение первого ползуна 74 в направлении стрелки S будет относительно уменьшать диаметр D центрирующих кронштейнов 76, в то время как скользящее перемещение первого ползуна 74 в направлении стрелки L будет относительно увеличивать диаметр D.
[0041] Радиальным выдвижением указанных центрирующих кронштейнов 76 можно управлять различным образом. В одном примере двигатель 52 может быть выполнен с возможностью обеспечения линейного перемещения для приведения в движение первого ползуна 74. В другом примере некоторые или все центрирующие кронштейны 76 могут быть упруго поджаты в наружном направлении (т.е. от продольной оси 68 каротажного устройства 10), по направлению к обсадной трубе 14 и максимальному диаметру, и могут управляться вручную или даже автоматически. Двигатель 52 может быть приведен в действие для противодействия указанному поджатию пружины, чтобы уменьшить выдвижение указанных центрирующих кронштейнов 76. В одном примере вокруг внешней стороны верхней части 70 корпуса может быть расположена регулировочная втулка 82, которая может быть непосредственно или с помощью промежуточных элементов соединена с двигателем 52. Регулировочная втулка 82 может быть присоединена шпоночным соединением для скольжения вдоль верхней части 70 корпуса и может, в том числе, иметь сужающуюся форму для взаимодействия с центрирующими кронштейнами 76. Таким образом, двигатель 52 может выборочно перемещать регулировочную втулку 82 относительно верхней части 70 корпуса в направлениях стрелок S или L. При перемещении в направлении стрелки S регулировочная втулка 82 может соприкасаться с центрирующими кронштейнами 76 и/или окружать их, с обеспечением их перемещения радиально внутрь, против указанной силы поджатия, до относительно меньшего диаметра D. Дальнейшее перемещение регулировочной втулки 82 в направлении стрелки S может приводить к диаметру даже меньшему, чем D, вплоть до заданного минимального диаметра. Перемещением центрирующих кронштейнов 76, например, с помощью двигателя 52, можно управлять дистанционно через электрический соединитель 34 или корпус 46 электроники, или оно может даже управляться автономно электронным блоком 46.
[0042] Каротажное устройство 10, кроме того, содержит сенсорную головку 60, которая вращает указанные датчики 20, 22 аксиально внутри ствола скважины 12 вокруг продольной оси 68. Датчики 20, 22 могут рассматриваться как сканирующие датчики. Как отмечено выше, может быть выгодно разместить датчики 20, 22 на разных расстояниях по отношению к стенке обсадной трубы 14. Таким образом, устройство 10 может содержать приспособление для выдвижения датчиков 20, 22 радиально в наружном направлении от продольной оси 68. В одном примере сенсорная головка 60 может содержать складную конструкцию 64, которая может содержать второй ползун 84 и множество соединительных кронштейнов 86, 88, присоединяющих второй ползун 84 к указанным сканирующим датчикам 20, 22.
[0043] Второй ползун 84 выполнен с возможностью скольжения вдоль продольной оси 68 устройства 10, относительно нижней части 72 корпуса для выборочного управления радиальным выдвижением датчиков 20, 22. Указанные соединительные кронштейны могут содержать первую группу соединительных кронштейнов 86, шарнирно соединенных со вторым ползуном 84 и выполненных с возможностью перемещения вместе с ним, и вторую группу соединительных кронштейнов 88, шарнирно соединенных с нижней частью 72 корпуса. Например, так как первая группа соединительных кронштейнов 86 может перемещаться вместе со вторым ползуном 84 по направлению стрелок S или L, а вторая группа соединительных кронштейнов 88 присоединена к нижней части 72 корпуса и неподвижна относительно стрелок S или L, скольжение второго ползуна 84 будет либо увеличивать, либо уменьшать радиальное выдвижение датчиков 20, 22. Таким образом, скольжение второго ползуна 84 по направлению стрелки S будет относительно уменьшать диаметр d датчиков 20, 22, в то время как скольжение второго ползуна 84 по направлению стрелки L будет относительно увеличивать диаметр d. Скольжение второго ползуна 84 может быть ограничено наконечником 66 и/или стопором 85, который может также ограничивать радиальное выдвижение датчиков 20, 22.
[0044] Каротажное устройство 10, кроме того, содержит выдвигающий узел, предназначенный по существу для одновременного управления радиальным выдвижением центрирующих кронштейнов 76 и датчиков 20, 22. В одном примере выдвигающий узел может содержать первый и второй ползуны 74, 84 и может, кроме того, содержать полый главный вал 90, присоединенный как к первому, так и второму ползунам 74, 84. Главный вал 90 выполнен с возможностью перемещения вдоль продольной оси 68 относительно любой или обеих, верхней и нижней, частей 70, 72 корпуса.
[0045] Например, перемещение главного вала 90 вдоль продольной оси 68 связывает скольжение первого и второго ползунов 74, 84 с обеспечением по существу одновременного управления радиальным выдвижением центрирующих кронштейнов 76 и указанных датчиков 20, 22. В результате центрирующие кронштейны 76 могут быть связаны с датчиками 20, 22, так что изменения диаметра D центрирующих кронштейнов 76 могут привести к изменениям диаметра d датчиков 20, 22.
[0046] В одном примере главный вал 90 может быть расположен в центре вдоль продольной оси 68 и присоединен к каждому ползуну 74, 84, первому и второму, болтовым соединением или т.п.В результате двигателем 52 прикладывается сила к регулировочной втулке 82, которая перемещает центрирующие кронштейны 76 в целом внутрь и приводит в движение первый ползун 74. Эта сила, приложенная двигателем 52, затем передается через главный вал 90 ко второму ползуну 84 для по существу одновременного направления радиального выдвижения датчиков 20, 22 внутрь. Например, фиг.3 иллюстрирует центрирующие кронштейны 76 В и датчики 20В, 22В, перемещенные радиально внутрь благодаря перемещению первого и второго ползунов 74В, 84В в целом по направлению стрелки S. Как показано на фиг.3, диаметры D2, d2 центрирующих кронштейнов 76В и датчиков 20В, 22В, соответственно, уменьшились (т.е. сместились радиально вовнутрь). Подобным образом при уменьшении диаметра, как показано на фиг.2, указанная сила поджатия, действующая с обеспечением перемещения центрирующих кронштейнов 76 в основном в наружном направлении, также передается главным валом 90 датчикам 20, 22 через первый и второй ползуны 74, 84, для подобного отводящего перемещения (как показано на фиг.2).
[0047] В следующем примере между центрирующими кронштейнами 76 и датчиками 20, 22 может быть расположен демпфер 92. Демпфер 92 может быть расположен между первым ползуном 74 и главным валом 90, или также может быть расположен между вторым ползуном 84 и главным валом 90, или в различных других положениях. Демпфер 92 может быть выполнен с возможностью подавления, например предотвращения, быстрых перемещений или сотрясений датчиков 20, 22, несмотря на подобные быстрые перемещения или сотрясения центрирующих кронштейнов 76. В различных примерах демпфер 92 может быть пружинным, поршневым, магнитным, гидравлическим демпфером или т.п., присоединенным к первому ползуну 74. Таким образом, продольное перемещение первого ползуна 74 может сжимать пружину таким образом, что перемещение датчиков 20, 22 откладывается до полного сжатия пружины. В результате, центрирующие кронштейны 76 могут перемещаться прежде, чем датчики 20, 22, и любые быстрые перемещения или сотрясения центрирующих кронштейнов 76 могут быть поглощены пружиной. Следует понимать, что по существу одновременное перемещение центрирующих кронштейнов 76 и датчиков 20, 22 может включать время запаздывания, обеспечиваемое демпфером 92.
[0048] В дополнение или альтернативно, диаметры радиального выдвижения центрирующих кронштейнов 76 и датчиков 20, 22 могут быть обусловлены заданной величиной. Так, например, центрирующие кронштейны 76 могут удерживаться на относительно большем, по сравнению с диаметром d датчиков 20, 22, диаметре D, чтобы предотвратить соприкосновение вращающейся сенсорной головки 60 и стенки обсадной трубы 14. В одном примере центрирующие кронштейны 76 могут быть радиально выдвинуты на первый диаметр D, и датчики 20, 22 могут быть радиально выдвинуты на второй диаметр d, и второй диаметр d может быть меньше, чем первый диаметр D, на основе, по меньшей мере, одного из: заранее заданного расстояния и заранее заданного отношения диаметров. В первом примере первый диаметр D центрирующих кронштейнов 76 может быть больше, чем второй диаметр d датчиков 20, 22 на заданное расстояние, такое как около ½ дюйма (1,25 см), 1 дюйм (2,5 см) или другое значение. Таким образом, когда центрирующие кронштейны 76 соприкасаются со стенкой обсадной трубы 14, датчики 20, 22 могут гарантированно находиться на заданном расстоянии от стенки обсадной трубы 14, например ¼ дюйма (0,6 см), ½ дюйма (1,25 см) или другом. Во втором примере первый диаметр D центрирующих кронштейнов 76 может быть больше, чем второй диаметр d датчиков 20, 22 на заданное соотношение, такое как 10%, 25%, или другое соотношение. Таким образом, когда центрирующие кронштейны 76 находятся в контакте со стенкой обсадной трубы 14, датчики 20, 22 могут быть гарантированно отделены промежутком от стенки обсадной трубы 14 в заданном соотношении 5%, 12,5%, или другом отношении к диаметру D.
[0049] В дополнение к этому или альтернативно, каротажное устройство 10 может, кроме того, содержать приводной вал 94, выполненный с возможностью вращения вместе с сенсорной головкой 60. Приводной вал 94 может быть присоединен к двигателю 56 и приводиться им в движение для приведения во вращение сенсорной головки 60. Приводной вал может быть расположен концентрически по отношению к главному валу 90. Таким образом, могут быть обеспечены два концентричных вала для передачи вращающего действия сенсорной головке 60 (через приводной вал 94), в то время как другой вал (т.е. главный вал 90) используется для активации движения складывания датчиков 20, 22. В одном примере приводной вал 94 может иметь относительно меньший диаметр и размещаться телескопически внутри полого главного вала 90, имеющего относительно больший диаметр.
[0050] В другом примере приводной вал 94 может быть присоединен к главному валу 90 посредством штифтового соединения с обеспечением вращения сенсорной головки 60, активируя в то же время и движение складывания датчиков 20, 22. Например, приводной вал 94 может содержать стержень, который скользит в продольном направлении в пазу главного вала 90, хотя различные другие конструкции также рассматриваются. В другом примере главный вал 90 может быть присоединен к первому ползуну 74 посредством упорного подшипника или подобного устройства с обеспечением возможности вращения сенсорной головки 60, в то же время активируя движение складывания датчиков 20, 22. Таким образом, нижняя часть 72 корпуса может свободно вращаться с сенсорной головкой 60 и вторым ползуном 84, в то время как верхняя часть 70 корпуса, первый ползун 74 и центрирующие кронштейны 76 могут оставаться относительно неподвижными (т.е. в целом не вращающимися). В дополнение к этому или альтернативно, любой из валов, главный 90 и приводной 94, или они оба могут быть сформированы из нескольких секций, которые могут быть или не быть непосредственно соединены вместе. Например, главный вал 90 может иметь нижнюю часть 91, которая может быть присоединена к нему или упираться в него. Кроме того, различные компоненты каротажного устройства 10 могут быть расположены концентрично с главным валом и/или приводным валом 90, 94, чтобы обеспечить компактную конструкцию устройства.
[0051] Изобретение описано со ссылкой на примерные варианты выполнения, описанные выше. Модификации и варианты могут быть осуществлены по прочтении и понимании этого описания. Примеры выполнения, объединяющие один или более аспектов изобретения, предназначены включить все такие модификации и изменения в той мере, в какой они попадают в объем прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВИЗУАЛИЗИРОВАННОГО КАРОТАЖА И КАРОТАЖНОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2013 |
|
RU2520977C1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА КЕРНОВОГО БУРЕНИЯ | 2008 |
|
RU2482274C2 |
| УСТРОЙСТВО И СПОСОБЫ ГЕРМЕТИЗАЦИИ СТВОЛА ПОДЗЕМНОЙ СКВАЖИНЫ И ВЫПОЛНЕНИЯ НА ТРОСЕ ДРУГИХ СКВАЖИННЫХ ОПЕРАЦИЙ ВРАЩЕНИЯ | 2010 |
|
RU2559255C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОМБИНИРОВАННОГО ИНДУКЦИОННОГО КАРОТАЖА И КАРОТАЖА С ФОРМИРОВАНИЕМ ИЗОБРАЖЕНИЙ | 2007 |
|
RU2447465C2 |
| СИСТЕМА КАРОТАЖА ДЛЯ ПРИМЕНЕНИЯ В СКВАЖИНЕ В ЗОНЕ ПОД ПОГРУЖНЫМ ЭЛЕКТРОЦЕНТРОБЕЖНЫМ НАСОСОМ | 2008 |
|
RU2459073C2 |
| УСТРОЙСТВО ЭЛЕКТРИЧЕСКОГО КАРОТАЖА ОБСАЖЕННОЙ СКВАЖИНЫ | 2018 |
|
RU2690711C1 |
| СКВАЖИННЫЙ ТРУБОРЕЗНЫЙ ИНСТРУМЕНТ | 2012 |
|
RU2595028C2 |
| Перфоратор гидромеханический скважинный сверлящий | 2021 |
|
RU2776541C1 |
| СПОСОБ И СИСТЕМА ОСУЩЕСТВЛЕНИЯ ПРОЦЕДУР КАРОТАЖА В СКВАЖИНАХ | 2007 |
|
RU2441981C2 |
| АППАРАТУРА МУЛЬТИМЕТОДНОГО МНОГОЗОНДОВОГО НЕЙТРОННОГО КАРОТАЖА - ММНК ДЛЯ ВРАЩАТЕЛЬНОГО СКАНИРОВАНИЯ РАЗРЕЗОВ НЕФТЕГАЗОВЫХ СКВАЖИН | 2021 |
|
RU2771437C1 |
Группа изобретений относится к скважинным устройствам и, в особенности, к устройству для каротажа скважины, способному работать в стволах скважин с широким диапазоном размеров. Каротажное устройство содержит корпус, центрирующий узел и сканирующую головку. При этом корпус ориентирован вдоль продольной оси. Центрирующий узел, который располагает корпус в центре скважины и содержит первый ползун и группу присоединенных к нему центрирующих кронштейнов. Причем первый ползун выполнен с возможностью скольжения вдоль продольной оси, с обеспечением выборочного управления радиальным выдвижением указанной группы центрирующих кронштейнов. Сканирующая головка вращает сканирующие датчики аксиально внутри скважины вокруг продольной оси и содержит второй ползун и соединительные кронштейны, соединяющие второй ползун с указанными сканирующими датчиками. Причем второй ползун выполнен с возможностью скольжения вдоль продольной оси, с обеспечением выборочного управления радиальным выдвижением указанных датчиков. Техническим результатом является повышение эффективности каротажа. 3 н. и 17 з.п. ф-лы, 3 ил.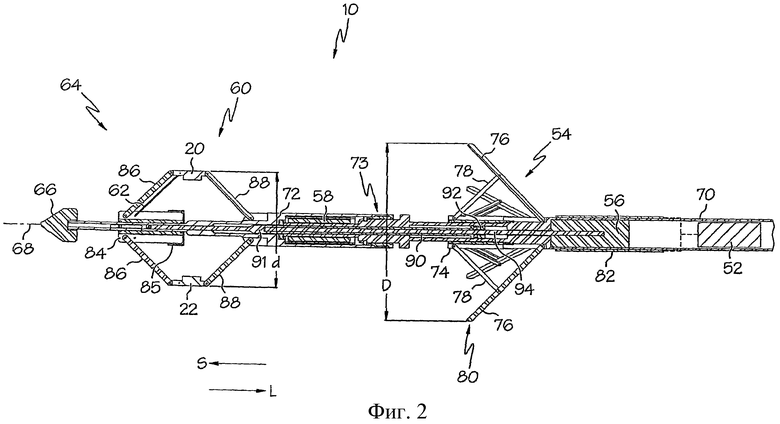
1. Каротажное устройство, предназначенное для каротажа скважины, содержащее корпус, ориентированный вдоль продольной оси, центрирующий узел, который располагает корпус, по существу, в центре скважины и содержит первый ползун и группу присоединенных к нему центрирующих кронштейнов, причем первый ползун выполнен с возможностью скольжения вдоль продольной оси, с обеспечением выборочного управления радиальным выдвижением указанной группы центрирующих кронштейнов, и сканирующую головку, которая вращает сканирующие датчики аксиально внутри скважины вокруг продольной оси и которая содержит второй ползун и соединительные кронштейны, соединяющие второй ползун с указанными сканирующими датчиками, причем второй ползун выполнен с возможностью скольжения вдоль продольной оси, с обеспечением выборочного управления радиальным выдвижением указанных датчиков.
2. Каротажное устройство по п.1, дополнительно содержащее главный вал, выполненный с возможностью перемещения относительно корпуса вдоль продольной оси и присоединенный к обоим ползунам, первому и второму.
3. Каротажное устройство по п.2, в котором перемещение главного вала вдоль продольной оси связывает скольжение первого и второго ползунов с обеспечением, по существу, одновременного управления радиальным выдвижением центрирующих кронштейнов и указанных датчиков.
4. Каротажное устройство по п.3, дополнительно содержащее демпфер, расположенный между центрирующими кронштейнами и указанными датчиками.
5. Каротажное устройство по п.2, дополнительно содержащее приводной вал, выполненный с возможностью вращения вместе со сканирующей головкой, расположенный концентрически по отношению к главному валу и присоединенный к главному валу для приведения во вращение сканирующей головки.
6. Каротажное устройство по п.2, в котором главный вал приводится в движение двигателем или гидравлическим исполнительным устройством с возможностью осуществления линейного перемещения.
7. Каротажное устройство по п.1, в котором указанные соединительные кронштейны содержат первую группу соединительных кронштейнов, шарнирно присоединенных ко второму ползуну и выполненных с возможностью перемещения вместе с ним, и вторую группу соединительных кронштейнов, шарнирно присоединенных к корпусу.
8. Каротажное устройство по п.1, дополнительно содержащее индуктивное соединение или токосъемное кольцо, предназначенное для передачи электрического тока между указанными датчиками и внешним электрическим соединителем.
9. Каротажное устройство по п.1, в котором указанные центрирующие кронштейны выполнены с возможностью радиального выдвижения до первого диаметра, а указанные датчики выполнены с возможностью радиального выдвижения до второго диаметра, причем второй диаметр меньше первого диаметра на заданное расстояние и/или в соответствии с заданным отношением диаметров.
10. Каротажное устройство по п.1, в котором, по меньшей мере, часть центрирующих кронштейнов содержит захватную часть, предназначенную для захвата внутренней поверхности ствола скважины.
11. Каротажное устройство по п.1, дополнительно содержащее вторичный центрирующий узел, содержащий вторую группу центрирующих кронштейнов, которые упруго поджаты в наружном направлении от продольной оси и предназначены для подавления проворота каротажного устройства внутри скважины.
12. Каротажное устройство, предназначенное для каротажа скважины, содержащее: корпус, ориентированный вдоль продольной оси, центрирующий узел, который располагает корпус, по существу, в центре скважины и содержит группу центрирующих кронштейнов, выполненных с возможностью радиального выдвижения в наружном направлении от продольной оси до первого диаметра, сканирующую головку, которая вращает сканирующие датчики аксиально внутри скважины вокруг продольной оси и содержит соединительные кронштейны, присоединенные к указанным сканирующим датчикам с обеспечением возможности выдвижения указанных датчиков радиально в наружном направлении от продольной оси на второй диаметр, и выдвигающий узел, выполненный с возможностью, по существу, одновременного управления радиальным выдвижением центрирующих кронштейнов и указанных датчиков.
13. Каротажное устройство по п.12, в котором выдвигающий узел содержит первый ползун, присоединенный к указанным центрирующим кронштейнам, второй ползун, соединяющий указанные соединительные кронштейны с указанными сканирующими датчиками, и главный вал, присоединенный к обоим ползунам, первому и второму, и выполненный с возможностью перемещения относительно корпуса вдоль продольной оси.
14. Каротажное устройство по п.13, дополнительно содержащее приводной вал, выполненный с возможностью вращения вместе со сканирующей головкой, расположенный концентрически по отношению к главному валу и присоединенный к главному валу для приведения во вращение сканирующей головки.
15. Каротажное устройство по п.12, в котором второй диаметр меньше первого диаметра на заданное расстояние и/или в соответствии с заданным отношением диаметров.
16. Каротажное устройство, предназначенное для каротажа скважины, содержащее: центрирующий узел, который располагает корпус, по существу, в центре скважины и содержит первый ползун и группу присоединенных к нему центрирующих кронштейнов, причем первый ползун выполнен с возможностью скольжения вдоль продольной оси с обеспечением выборочного управления радиальным выдвижением указанных центрирующих кронштейнов, сканирующую головку, которая вращает сканирующие датчики аксиально внутри скважины вокруг продольной оси и которая содержит второй ползун, присоединенный к указанным сканирующим датчикам, причем второй ползун выполнен с возможностью скольжения вдоль продольной оси с обеспечением выборочного управления радиальным выдвижением указанных датчиков, и главный вал, присоединенный к обоим ползунам, первому и второму, и выполненный с возможностью линейного перемещения вдоль продольной оси для обеспечения скольжения обоих ползунов, первого и второго, для одновременного управления радиальным выдвижением центрирующих кронштейнов и указанных датчиков.
17. Каротажное устройство по п.16, дополнительно содержащее приводной вал, выполненный с возможностью вращения вместе со сканирующей головкой, расположенный концентрически по отношению к главному валу и присоединенный к главному валу для приведения во вращение сканирующей головки.
18. Каротажное устройство по п.16, дополнительно содержащее соединительные кронштейны, соединяющие второй ползун с указанными сканирующими датчиками и содержащие первую группу соединительных кронштейнов, шарнирно присоединенных ко второму ползуну и выполненных с возможностью перемещения вместе с ним, и вторую группу соединительных кронштейнов, шарнирно присоединенных к корпусу.
19. Каротажное устройство по п.16, в котором указанные центрирующие кронштейны выполнены с возможностью радиального выдвижения до первого диаметра, а указанные датчики выполнены с возможностью радиального выдвижения до второго диаметра, причем второй диаметр меньше первого диаметра на заданное расстояние и/или в соответствии с заданным отношением диаметров.
20. Каротажное устройство по п.16, дополнительно содержащее демпфер, расположенный между центрирующими кронштейнами и указанными датчиками.
| US 5531112 А, 02.07.1996 | |||
| ИЗМЕРИТЕЛЬНЫЙ ЗОНД ДЛЯ НЕФТЕГАЗОВОЙ СКВАЖИНЫ | 2003 |
|
RU2319004C2 |
| Устройство для контроля технического состояния обсаженных скважин | 1979 |
|
SU863849A1 |
| US 5661237 А, 26.08.1997 | |||
| US 4130816 A, 19.12.1978 | |||
| US 4912683 A, 27.03.1990 | |||
| US 5947213 A, 07.09.1999. | |||

