ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
Данная заявка испрашивает приоритет согласно предварительной патентной заявке США № 61/026125, озаглавленной «SUITABLE TRIGGER MECHANISM TO CONTROL NEW CELL IDENTIFICATION IN UE WHEN IN DRX MODE», поданной 4 февраля 2008 года, которая включена в настоящий документ посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
Последующее описание относится в общем к системам беспроводной связи, и более конкретно - к параметрам и протоколам для корректировки времени идентификации ячейки для обеспечения экономии мощности в мобильных устройствах, которые тем не менее обеспечивают соответствующую эффективность идентификации ячейки.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Системы беспроводной связи широко используются для обеспечения информации различного типа для осуществления связи, такой как голос, данные и т.д. Эти системы могут быть системами с множественным доступом, которые могут поддерживать связь с множеством пользователей с помощью совместного использования доступных системных ресурсов (например, пропускной способности и мощности передачи). Примеры таких систем с множественным доступом включают в себя системы множественного доступа с кодовым разделением (CDMA), системы множественного доступа с временным разделением (TDMA), системы множественного доступа с частотным разделением (FDMA), системы долгосрочного развития 3GPP (LTE), включающие в себя E-UTRA, и системы множественного доступа с ортогональным частотным разделением (OFDMA).
Система связи мультиплексирования с ортогональным частотным разделением (OFDM) эффективно делит весь диапазон частот системы на множество (NF) поднесущих, которые могут также упоминаться как частотные подканалы, тоны или элементы разрешения по частоте. Для системы OFDM данные, которые будут передавать (т.е. информационные биты), сначала кодируют с помощью определенной схемы кодирования для генерации кодированных битов, и кодированные биты дополнительно группируют в многоразрядные символы, которые затем сопоставляют с символами модуляции. Каждый символ модуляции соответствует точке в сигнальном созвездии, определенном в соответствии с определенной схемой модуляции (например, M-PSK или M-QAM), используемой для передачи данных. В каждом временном интервале, который может зависеть от пропускной способности каждой частотной поднесущей, символ модуляции можно передавать на каждой из NF частотных поднесущих. Таким образом, OFDM может использоваться для борьбы с межсимвольными помехами (ISI), вызванными селективным затуханием частот, которое характеризуется различным ослаблением по диапазону частот системы.
В общем случае система беспроводной связи с множественным доступом может одновременно поддерживать связь с множеством беспроводных терминалов, которые осуществляют связь с одной или большем количеством базовых станций через передачи по прямой и обратной линиям связи. Прямая линия связи (или нисходящая линия связи) относится к линии связи от базовых станций к терминалам, а обратная линия связи (или восходящая линия связи) относится к линии связи от терминалов к базовым станциям. Эту линию связи можно устанавливать через систему с одним входом и одним выходом, с множеством входов и одним выходом или с множеством входов и множеством выходов (MIMO).
Система MIMO использует множество (NT) передающих антенн и множество (NR) приемных антенн для передачи данных. Канал MIMO, сформированный с помощью NT передающих и NR приемных антенн, можно разложить на NS независимых каналов, которые также упоминаются как пространственные каналы, где NS ≤ минимум {NT, NR}. В общем случае, каждый из NS независимых каналов соответствует размерности. Система MIMO может обеспечивать улучшенную эффективность (например, более высокую пропускную способность и/или большую надежность), если используются дополнительная размерность, созданная множеством передающих и приемных антенн. Система MIMO также поддерживает дуплексные системы с временным разделением (TDD) и дуплексные системы с частотным разделением (FDD). В системе TDD передачи прямой линии связи и передачи обратной линии связи находятся в той же самой частотной области, так что принцип взаимности позволяет оценивать канал прямой линии связи с помощью канала обратной линии связи. Это дает возможность точке доступа извлекать усиление передачи при формировании диаграммы направленности в прямой линии связи, когда множество антенн доступны в точке доступа.
Один из аспектов эффективности беспроводной связи вовлекает способность беспроводного устройства периодически выключаться для экономии мощности. Этот период или состояние бездеятельности упоминается как прерывистый прием, или DRX. В идеале, беспроводное устройство может оставаться в этом состоянии максимально долго для увеличения продолжительности срока службы аккумулятора между зарядами. Однако если устройство находится в состоянии ожидания или в состоянии «выключено» слишком долго, то оно может пропустить необходимое осуществление связи с ячейками зоны обслуживания во время периодов мобильности устройства.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Последующее представляет упрощенную сущность для обеспечения основного понимания некоторых аспектов заявляемого предмета изобретения. Данное описание сущности изобретения не является обширным представлением и не предназначено ни для идентификации ключевых/критических элементов, ни для очерчивания возможностей заявляемого предмета изобретения. Его цель состоит в том, чтобы представить некоторые концепции в упрощенной форме в качестве вводной части к более подробному описанию, которое представлено ниже.
Обеспечиваются системы и способы для корректировки времени идентификации новой ячейки в беспроводных приемниках для обеспечения обнаружения ячейки во время периодов мобильности и обеспечения приемлемого времени для экономии мощности. Эффективность прерывистого приема (DRX) динамически корректируют в приемнике для увеличения количества времени, когда приемник должен идентифицировать соседние ячейки. Различные сетевые параметры анализируют для определения корректировки, причем параметры относятся к периодам активности DRX в нисходящей линии связи и к времени цикла DRX в приемнике. Другой параметр - номер системного кадра (SFN), который является идентификатором для вновь обнаруживаемой ячейки. В общем случае время DRX корректируют для предоставления возможности декодировать SFN в течение необходимого промежутка времени (например, в течение предварительно определенного количества периодов субкадра). С помощью такой регулировки времени включения/выключения DRX улучшают обнаружение новой ячейки, особенно при более высоких скоростях передвижения (мобильности), в то время как все-таки можно экономить мощность в приемнике.
Для выполнения вышеуказанных и связанных целей конкретные иллюстративные аспекты изобретения описаны в последующем описании и прилагаемых чертежах. Эти аспекты указывают, однако, только некоторые из различных способов, которыми можно использовать принципы заявляемого изобретения, и заявляемый объект изобретения включает в себя все такие аспекты и их эквиваленты. Другие преимущества и новые признаки будут очевидны из последующего подробного описания при его рассмотрении вместе с чертежами.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1 - высокоуровневая структурная схема системы, которая использует декодер идентификатора ячейки и управление DRX для обнаружения новых беспроводных ячеек и для уменьшения потребления мощности в пользовательском устройстве.
Фиг.2 - блок-схема последовательности операций, которая показывает способ идентификации беспроводной ячейки.
Фиг.3-7 - схемы, которые показывают различные факторы внешней среды, относящиеся к настройке параметра идентификации ячейки.
Фиг.8 показывает примерное устройство связи для идентификации ячейки.
Фиг.9 показывает систему беспроводной связи множественного доступа.
Фиг.10 и 11 показывают примерные системы связи.
Фиг.12 показывает примерный логический модуль для идентификации ячейки.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Представленные системы и способы обеспечивают эффективное обнаружение новых беспроводных ячеек и уменьшают потери мощности в беспроводных устройствах. В одном из аспектов обеспечивается способ идентификации ячейки. Способ включает в себя определение состояния приема в беспроводном устройстве и сравнение цикла приема с параметром субкадра в беспроводном устройстве. Способ также включает в себя идентификацию следующей беспроводной ячейки в течение предварительно определенного времени сравнения. Предварительно определенное время можно динамически корректировать для учета скорости перемещения или других факторов внешней среды (например, шума, перегрузки сети и т.д.).
Согласно Фиг.1, система 100 использует декодер 102 идентификатора ячейки, имеющий средство управления DRX для обнаружения новых беспроводных ячеек и для уменьшения потребляемой мощности в пользовательском устройстве. Система 100 включает в себя одну или большее количество базовых станций 120 (также упоминается как узел, усовершенствованный узел B - eNB), которая может быть объектом, который может осуществлять связь по сети 110 беспроводной связи со вторым устройством 130 (или устройствами). Например, каждое устройство 130 может быть терминалом доступа (также упоминается как терминал, пользовательское устройство, объект управления мобильностью (MME) или мобильное устройство). Базовая станция 120 передает данные к устройству 130 через нисходящую линию связи 140 (DL) и принимает данные через восходящую линию связи 150 (UL). Такое обозначение, как восходящая линия связи и нисходящая линия связи, произвольно, поскольку устройство 130 может также передавать данные через нисходящую линию связи и принимать данные через каналы восходящей линии связи. Следует отметить, что хотя показаны два компонента 120 и 130, в сети 110 можно использовать больше двух компонентов, причем такие дополнительные компоненты можно также настраивать для описанной идентификации ячейки. Перед продолжением следует отметить, что для краткости используют различные сокращения. Сокращения, если они не определены вначале, определяют в конце описания.
Система 100 предоставляет возможность устройствам корректировать время идентификации новой ячейки для обеспечения обнаружения ячейки во время периодов мобильности и обеспечивать приемлемое время для экономии мощности. Эффективность прерывистого приема (DRX) динамически корректируют в устройстве 130 для увеличения количества времени, когда устройство должно идентифицировать соседние ячейки. Для определения корректировок анализируют различные сетевые параметры 160, причем параметры относятся к периодам активности DRX и к времени цикла DRX нисходящей линии связи в устройстве 130. Другой параметр 160 - номер системного кадра (SFN), который является идентификатором для вновь обнаруживаемой ячейки. В общем случае время DRX корректируют для предоставления возможности декодирования SFN на этапе 102 в течение необходимого промежутка времени (например, в течение предварительно определенного количества периодов субкадра). С помощью такой корректировки времени включения/ выключения DRX улучшают обнаружение новой ячейки, особенно при более высоких скоростях мобильности, в то время как мощность можно все еще экономить в приемнике.
В общем случае, непрерывная пакетная связь (CPC) по сети 110 предоставляет возможность UE 130 выключать свой приемник (DRX) во время периодов бездействия для экономии мощности. Одна из спецификаций требует, чтобы UE 130 могло идентифицировать и декодировать SFN новой обнаруживаемой ячейки, принадлежащей контролируемому набору, в течение времени Tidentify intra. Если сигнал состояния, например, DL_DRX_Active=1, то Tidentify intra может иметь значение до 6 секунд, в предельном значении, из-за определения параметров непрерывной пакетной связи, которые могут повлиять на мобильность и эффективность.
Для решения проблемы эффективности и мощности, различные параметры можно корректировать, основываясь частично на исследованиях сети, которые описаны ниже. Таким образом, когда состояние DL_DRX_Active=1, UE 130 идентифицирует и декодирует SFN новой обнаруживаемой ячейки в течение времени идентификации ячейки, равного 800 миллисекунд (мс) (или другого времени), когда цикл DRX UE<10 субкадров, и 1,5 секунды, когда цикл DRX UE>10 субкадров. Понятно, что можно выбирать другие диапазоны времени (например, от 200 мс минимум и до 4 секунд максимум). Альтернативно, время декодирования можно устанавливать динамически, причем UE корректирует время, основываясь на обнаруживаемых в настоящее время условиях или на других факторах (например, на параметрах настройки политик в мобильном устройстве, например, чтобы во время часа пик использовать эти параметры настройки времени). Далее описаны различные нюансы относительно определения значений других параметров, которые можно использовать в беспроводной сети.
Когда ячейка находится в состоянии DCH, UE 130 измеряет идентифицированные внутричастотные ячейки и ищет новые внутричастотные ячейки в контролируемом наборе. В случае, если сеть 110 запрашивает, чтобы UE 130 сообщало об обнаруженном наборе ячеек, то UE может также искать внутричастотные ячейки вне контролируемого и активного набора. Ячейки, которые не включают в себя ни активный набор, ни контролируемый набор, и которые идентифицированы с помощью UE 130, принадлежат обнаруженному набору согласно одной из спецификаций. Если активизированы последовательности шаблона сжатого режима, то внутричастотные измерения можно выполнять между промежутками передачи одновременно для приема данных от активного набора ячеек.
Если DL_DRX_Active=1 и UE выполняет DRX, то внутричастотные измерения можно выполнять, когда приемник активный, для приема данных от активного набора ячеек.
Если DL_DRX_Active=0, то UE может идентифицировать и декодировать SFN новой обнаруживаемой ячейки, принадлежащей контролируемому набору, в течение:

В общем случае и согласно заявляемому объекту изобретения, если DL_DRX_Active = 1 и цикл DRX UE<10 субкадров, то UE может идентифицировать и декодировать SFN новой обнаруживаемой ячейки, принадлежащей контролируемому набору, в течение Tidentify intra=800 мс (также упоминается как время A). Если DL_DRX_Active=1 и цикл DRX UE≥10 субкадров, то UE может идентифицировать и декодировать SFN новой обнаруживаемой ячейки, принадлежащей контролируемому набору, в течение Tidentify intra=1,5 с (также упоминается как время b). Понятно, что другие значения можно конфигурировать или динамически устанавливать для времени A и/или времени B.
Ячейка рассматривается как обнаруживаемая, когда:
- CPICH Ec/Io >-20 дБ, если DL_DRX_Active=0, или CPICH Ec/Io ≥> -17 дБ, если DL_DRX_Active = 1,
- SCH_Ec/Io > -20 дБ, если DL_DRX_Active=0, или SCH Ec/Io ≥> -17 дБ, если DL_DRX_Active=1, по меньшей мере для одного сигнала канала и SCH Ec/Ior делится между первичным кодом синхронизации и вторичным кодом синхронизации. Когда используется фильтрация L3, может ожидаться дополнительная задержка.
В случае конфликта, когда последовательность сжатого промежутка активизирована, UE может потребоваться устанавливать приоритет декодирования SFN. UE должно быть в состоянии идентифицировать новую обнаруживаемую ячейку, не принадлежащую контролируемому набору, в течение: Tldentify detectedset=30 с, когда CPICH Ec/Io > -20 дБ, SCH_Ec/Io > -17 дБ и SCH_Ec/Ior делится между первичным кодом синхронизации и вторичным кодом синхронизации. Когда используется фильтрация L3, то может ожидаться дополнительная задержка.
Когда UE поддерживает измерения IPDL и когда планируются неактивные периоды с продолжительностью, равной 1 слоту, физический уровень UE может идентифицировать новую ячейку и сообщать измерения типа 2 разности времени SFN - зарегистрированный SFN в течение

где TMeasurement_Period Intra = период измерения для внутричастотного измерения CPICH, и TIPDL зависит от размера окна поиска, заданного в информации соседней ячейки UE, устанавливающего положение OTDOA, как приведено ниже в таблице 1.
В состоянии CELL_DCH период измерения для внутричастотных измерений равен, например, 200 мс. Когда последовательность шаблона промежутка передачи не активизирована и DL_DRX_Active=0, UE может выполнять измерения CPICH для 8 идентифицированных внутричастотных ячеек контролируемого набора и/или активного набора, и физический уровень UE может сообщать об измерениях на более высокие уровни с периодом измерения 200 мс. Когда одна или более последовательностей шаблона отсутствия передачи активизированы, и/или DL_DRX_Active=1, UE может выполнять измерения CPICH по меньшей мере для Ymeasurement intra ячеек, причем Ymeasurement intra определяется в нижеследующем уравнении.
Если UE идентифицировало больше, чем Ymeasurement intra ячеек, то UE должно выполнять измерения идентифицированных ячеек, но скорость передачи сообщений об измерениях CPICH ячеек с физического уровня UE на более высокие уровни может быть уменьшена.

где Xbasic measurement FDD = 8 (ячеек);
TMeasurement_Period intra = 200 мс; это период измерения для внутричастотного измерения CPICH;
TIntra - время, которое доступно для внутричастотных измерений во время периода измерения с произвольно выбранной синхронизацией. Если DL_DRX_Active=1, и UE выполняют DRX, то внутричастотные измерения предполагаются выполняемыми, когда приемник гарантированно будет активным и одновременно с приемом данных от активного набора ячеек. Если DL_DRX_Active=0, то Tbasic_identify_FDD, intra=800 мс, или если DL_DRX_Active=1, то Tbasic_identify_FDD, intra=300 мс. Это период времени, используемый в уравнении внутричастотных измерений, в которых определяется время, когда UE разрешается идентификация новой ячейки FDD.
UE 130 может выполнять измерения CPICH по меньшей мере для 1 обнаруженной внутричастотной ячейки в обнаруженном наборе, и физический уровень UE может сообщать об измерениях на более высокие уровни с периодом измерения, например, равным 10 с.
Следует отметить, что система 100 может использоваться с терминалом доступа или с мобильным устройством и может быть, например, модулем, таким как карта SD, сетевая плата, беспроводная сетевая плата, компьютер (который включает в себя портативные компьютеры, настольные компьютеры, карманные персональные компьютеры (КПК)), мобильные телефоны, интеллектуальные телефоны или любой другой соответствующий терминал, который может использоваться для получения доступа к сети. Терминал получает доступ к сети посредством компонента доступа (не показан). В одном из примеров соединение между терминалом и компонентами доступа может быть беспроводным по природе, причем компонентом доступа может быть базовая станция, а мобильным устройством - беспроводный терминал. Например, терминал и базовые станции могут осуществлять связь посредством любого соответствующего беспроводного протокола, который включает в себя множественный доступ с временным разделением (TDMA), множественный доступ с кодовым разделением (CDMA), множественный доступ с частотным разделением (FDMA), ортогональное частотное мультиплексирование (OFDM), FLASH OFDM, множественный доступ с ортогональным частотным разделением (OFDMA) или любой другой соответствующий протокол, но не ограничен ими.
Компоненты доступа могут быть узлом доступа, связанным с проводной сетью или беспроводной сетью. Для этого компоненты доступа могут быть, например, маршрутизатором, коммутатором или аналогичным устройством. Компонент доступа может включать в себя один или большее количество интерфейсов, например, модулей связи для осуществления связи с другими сетевыми узлами. Дополнительно, компонент доступа может быть базовой станцией (или беспроводной точкой доступа) в сети сотовой связи, причем базовые станции (или беспроводные точки доступа) используются для обеспечения областей беспроводного обслуживания для множества абонентов. Такие базовые станции (или беспроводные точки доступа) можно размещать так, чтобы обеспечивать непрерывные области обслуживания для одного или большего количества сотовых телефонов и/или других беспроводных терминалов.
На Фиг.2 иллюстрируется методология беспроводной связи. Хотя в целях простоты объяснения данная методология (и другие описанные методологии) показаны и описаны как последовательность действий, необходимо понимать, что методологии не ограничены порядком действий, поскольку некоторые действия в соответствии с одним или более вариантом осуществления могут происходить в другом порядке и/или одновременно с другими действиями по сравнению с показанными и описанными здесь. Например, специалистам должно быть понятно, что методология может альтернативно быть представлена, как последовательность взаимодействующих состояний или событий, например, как на диаграмме состояний. Кроме того, можно использовать не все показанные действия для осуществления методологии в соответствии с заявляемым объектом изобретения.
На этапе 210, состояние DRX контролируют с помощью беспроводного устройства. Как отмечено ранее, такое состояние можно контролировать в канале нисходящей линии связи, и оно может указывать активное состояние устройства. На этапе 220 параметр цикла DRX сравнивают с заданным количеством субкадров (например, 10 субкадров). На этапе 230, если параметр цикла DRX меньше заданного порогового значения (например, меньше 10 субкадров), то процесс переходит к этапу 240. На этапе 240 SFN идентифицируют и декодируют в течение предварительно определенного времени A. Как отмечено ранее, одним примерным значением времени A является 800 мс. Если на этапе 230 параметр цикла DRX больше или равен предварительно определенному количеству субкадров, то процесс переходит к этапу 250. На этапе 250 SFN идентифицируют и декодируют в течение предварительно определенного времени B. Как отмечено ранее, одним примерным значением времени B является 1,5 с. Такие пороговые значения можно изменять вручную или динамически. Например, время B на этапе 250 можно корректировать до 3 с или устанавливать в другие значения. Можно устанавливать множество отличающихся пороговых значений. В общем случае, процессом 200 управляют с помощью следующих уравнений.
Если DL_DRX_Active=1 (на этапе 210) и цикл DRX устройства < 10 субкадров (на этапе 230), то устройство должно идентифицировать и декодировать SFN новой обнаруживаемой ячейки, принадлежащей контролируемому набору, в течение, например, Tidentify intra = 800 мс. Если DL_DRX_Active = 1 (на этапе 210) и цикл DRX устройства ≥ 10 субкадров (на этапе 230), то устройство должно идентифицировать и декодировать SFN новой обнаруживаемой ячейки, принадлежащей контролируемому набору, в течение, например, Tidentify intra = 1,5 с.
Описанные методы могут быть реализованы различными средствами. Например, эти методы могут быть реализованы в аппаратных средствах, в программном обеспечении или в их комбинации. Для аппаратной реализации процессоры можно воплощать в пределах одной или большего количества специализированных интегральных схем (СпИС), процессоров цифровой обработки сигналов (ПЦОС), цифровых устройств обработки сигналов (ЦУОС), программируемых логических устройств (ПЛУ), программируемых пользователем вентильных матриц (ППВМ), процессоров, контроллеров, микроконтроллеров, микропроцессоров, других электронных блоков, предназначенных для выполнения описанных функций, или их комбинаций. При использовании программного обеспечения реализацию можно осуществлять через модули (например, процедуры, функции и т.д.), которые выполняют описанные функции. Программные коды можно хранить в блоке памяти и выполнять с помощью процессоров.
Фиг.3-7 - схемы, которые показывают различные факторы внешней среды, относящиеся к настройке параметра идентификации ячейки, и которые все вместе описаны в данной работе. Время идентификации новой ячейки для UE с возможностью DRX выполняют с помощью поиска представляющего интерес компромисса между сроком службы аккумулятора и эффективностью в среде мобильной связи. В общем случае, когда DRX является активным, могут использоваться различные Tbasic_identify (называют выше как Tldentlfy intra), которые обеспечивают некоторые дополнительные возможности экономии мощности. Одним из аспектов является то, что фактическое идентифицирующее время дополнительно не масштабируют ни с помощью фактического коэффициента активности приемника, ни с помощью некоторого передаваемого коэффициента использования. Его необходимо масштабировать в течение любых промежутков межчастотных измерений. Из выполненных «полевых исследований» соответствующее время Tbasic_identify, когда DRX является активным, может иметь порядок 3 секунд, для обеспечения возможности некоторой экономии мощности, все еще обеспечивая приемлемую эффективность мобильной связи. Можно добавлять пороговое значение, такое как CPC-Sintra, для DRX усовершенствованных UE. Однако необходимо дополнительно понимать преимущества такой схемы, так как по меньшей мере CPICH обслуживающего и активного набора ячеек может потребоваться измерять довольно часто, чтобы гарантировать, что они не ухудшаются.
Следующие данные, представленные на Фиг.3-7, представляет смесь среды стационарной и мобильной связи, как показано на графике 300 на Фиг.3. На графике 310 на Фиг.3 показаны pdf и cdf в зависимости от времени, затраченного от обнаружения новой ячейки до обновления активного набора (или из-за события 1A, или из-за события 1C), полученные из данных измерений. На Фиг.4 на графике 400 показаны аналогичные статистические данные, как на Фиг.3, но для другого города (Лондон, Великобритания). cdf демонстрируют аналогичную тенденцию. Однако следует отметить различие в средних значениях (6 секунд против 25 секунд), а также в точке 10 процентилей и меньше между 2 cdf. В частности, наблюдается следующее:
- вероятность, что время от обнаружения ячейки до обновления активного набора (ASU) находится между 0,5 с и 1 с, равняется 12,5%,
- вероятность, что время от обнаружения ячейки до ASU находится между 1 с и 1,5 с, равняется 9%.
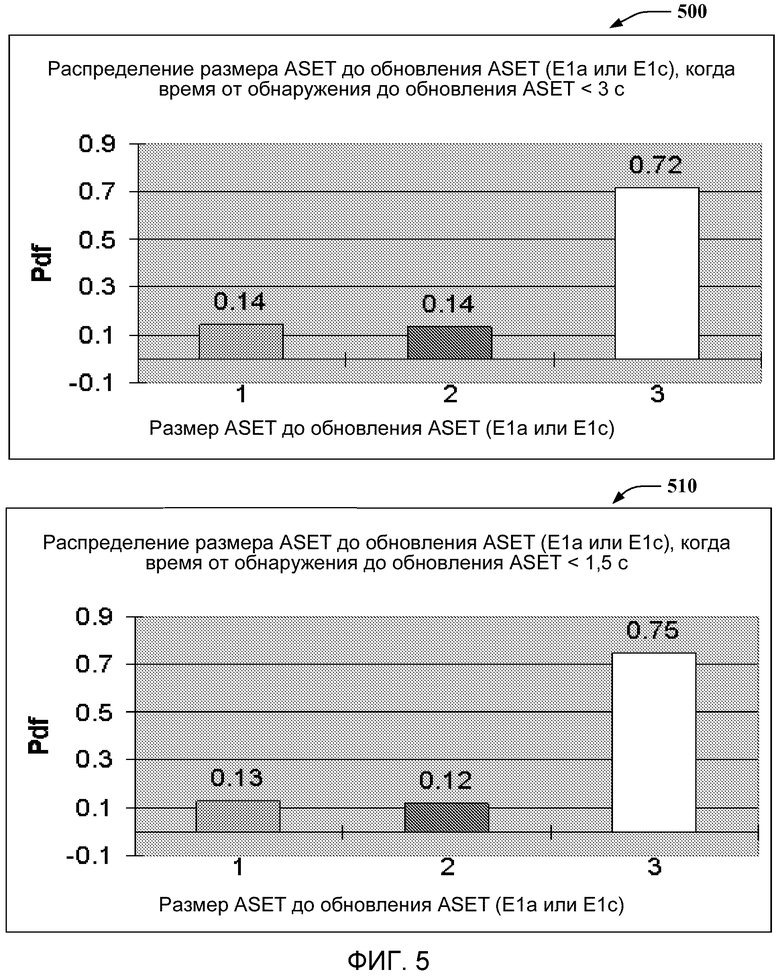
Кроме того, на графиках 500 и 510 на Фиг.5 распределение размера активного набора показано до ASU, в то время как время от обнаружения до ASU < 3 с и < 1,5 с, соответственно.
На графике 510 на Фиг.5 может использоваться услуга реального времени, такая как передача голоса CS по HS или VoIP в режиме HS. Когда время от идентификации новой ячейки до времени, когда ячейка добавлена к активному набору, составляет достаточный процент (14%) времени, размер активного набора равен 1. Теперь в HS-режиме, в DL нет в общем случае никакой мягкой передачи обслуживания. Кроме того, когда размер активного набора равен 1, нет в общем случае никаких возможностей для изменения обслуживающей ячейки в случае, если мощность сигнала в обслуживающей ячейке стала слабой, если новая ячейка не обнаружена вовремя.
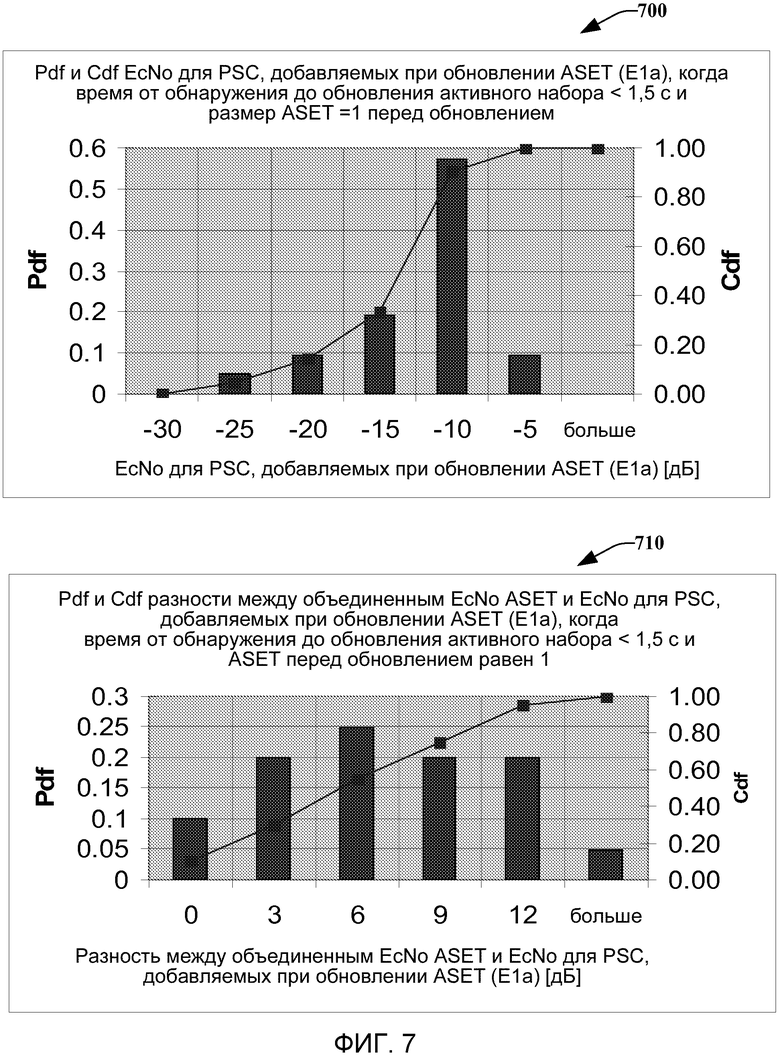
На графике 600 на Фиг.6 и на графиках 700 и 710 на Фиг.7 показаны следующие элементы:
- pdf/cdf Ec/No обслуживающей ячейки до обновления активного набора (ASU), когда время от обнаружения до обновления активного набора < 1,5 секунды и размер активного набора = 1;
- pdf/cdf Ec/No новой ячейки, перед тем как новая ячейка будет добавлена к активному набору, когда время от обнаружения до обновления активного набора < 1,5 секунды и размер активного набора = 1;
- pdf/cdf разности между Ec/No обслуживающей ячейки и Ec/No новой ячейки (обслуживающей/новой) до обновления активного набора (ASU), когда время от обнаружения до обновления активного набора < 1,5 секунды и размер активного набора = 1. ASET - сокращение для размера активного набора.
На Фиг.6 и 7 в случае, когда размер активного набора = 1, во время обновления активного набора, когда время от обнаружения до ASU < 1,5 с, наблюдается следующее:
- существует 10%-ная вероятность, что соседняя ячейка сопоставима с обслуживающей ячейкой (0 дБ), и 20%-ная вероятность, что соседняя ячейка находится в пределах 3 дБ от обслуживающей ячейки;
- вероятность, что Ec/No новой ячейки во время ASU < -15 дБ приблизительно равна 65%.
Это предполагает, что если дополнительная задержка разрешается при идентификации новой ячейки в случаях, когда размер активного набора = 1, линия связи может быть уязвимой для помех, вызванных новой ячейкой, что, в свою очередь, может привести к высокой частоте сброса вызова в таких услугах, как CS по HS и VoIP.
Фиг.8 показывает устройство связи 800, которое может быть устройством беспроводной связи, например беспроводным терминалом. Дополнительно или альтернативно, устройство связи 800 может находиться в пределах проводной сети. Устройство связи 800 может включать в себя память 802, которая может хранить команды для выполнения анализа сигнала в терминале беспроводной связи. Дополнительно, устройство связи 800 может включать в себя процессор 804, который может выполнять команды, находящиеся в памяти 802, и/или команды, принимаемые от другого сетевого устройства, причем команды могут относиться к конфигурированию или работе устройства связи 800 или соотнесенных устройств связи.
На Фиг.9 показана система 900 беспроводной связи с множественным доступом. Система 900 беспроводной связи с множественным доступом включает в себя множество ячеек, которые включают в себя ячейки 902, 904 и 906. В одном из аспектов системы 900, ячейки 902, 904 и 906 могут включать в себя узел B, который включает в себя множество секторов. Множество секторов могут быть сформированы с помощью групп антенн, причем каждая антенна отвечает за связь с UE в части ячейки. Например, в ячейке 902 каждая антенна из группы антенн 912, 914 и 916 может соответствовать различному сектору. В ячейке 904 каждая антенна из группы антенн 918, 920 и 922 соответствует различному сектору. В ячейке 906 каждая ячейка из группы антенн 924, 926 и 928 соответствует различному сектору. Ячейки 902, 904 и 906 могут включать в себя несколько устройств беспроводной связи, например пользовательских устройств, или UE, которые могут осуществлять связь с одним или большим количеством секторов каждой из ячеек 902, 904 или 906. Например, UE 930 и 932 могут осуществлять связь с узлом B 942, UE 934 и 936 могут осуществлять связь с узлом B 944, и UE 938 и 940 могут осуществлять связь с узлом B 946.
На Фиг.10 показана система беспроводной связи с множественным доступом согласно одному из аспектов. Точка доступа 1000 (AP) включает в себя множество групп антенн, одна группа включает в себя 1004 и 1006, другая группа включает в себя 1008 и 1010, и еще одна группа включает в себя 1012 и 1014. На Фиг.10 только две антенны показаны для каждой группы антенн, однако большее или меньшее количество антенн можно использовать для каждой группы антенн. Терминал доступа 1016 (В) осуществляет связь с антеннами 1012 и 1014, причем антенны 1012 и 1014 передают информацию к терминалу доступа 1016 по прямой линии связи 1020 и принимают информацию от терминала доступа 1016 по обратной линии связи 1018. Терминал доступа 1022 осуществляет связь с антеннами 1006 и 1008, причем антенны 1006 и 1008 передают информацию к терминалу доступа 1022 по прямой линии связи 1026 и принимают информацию от терминала доступа 1022 по обратной линии связи 1024. В системе связи FDD линии связи 1018, 1020, 1024 и 1026 могут использовать различные частоты для связи. Например, прямая линия связи 1020, может использовать другую частоту, чем частота, используемая обратной линией связи 1018.
Каждая группа антенн и/или область, в которой они осуществляют связь, часто упоминается как сектор точки доступа. Каждая группа антенн предназначена для осуществления связи с терминалами доступа в секторе области обслуживания точки доступа 1000. При осуществлении связи по прямым линиям связи 1020 и 1026, передающие антенны точки доступа 1000 используют формирование диаграммы направленности для улучшения отношения сигнал-шум прямых линий связи для различных терминалов доступа 1016 и 1024. Кроме того, точка доступа, используя формирование диаграммы направленности для передачи к терминалам доступа, расположенным случайным образом в зоне обслуживания, создает меньше помех терминалам доступа в соседних ячейках, чем передача точки доступа через одну антенну ко всем ее терминалам доступа. Точка доступа может быть фиксированной станцией, используемой для осуществления связи с терминалами, и может также упоминаться как точка доступа, узел B, или может использоваться некоторая другая терминология. Терминал доступа можно также называть терминалом доступа, пользовательским устройством (UE), устройством беспроводной связи, терминалом, терминалом доступа, или может использоваться некоторая другая терминология.
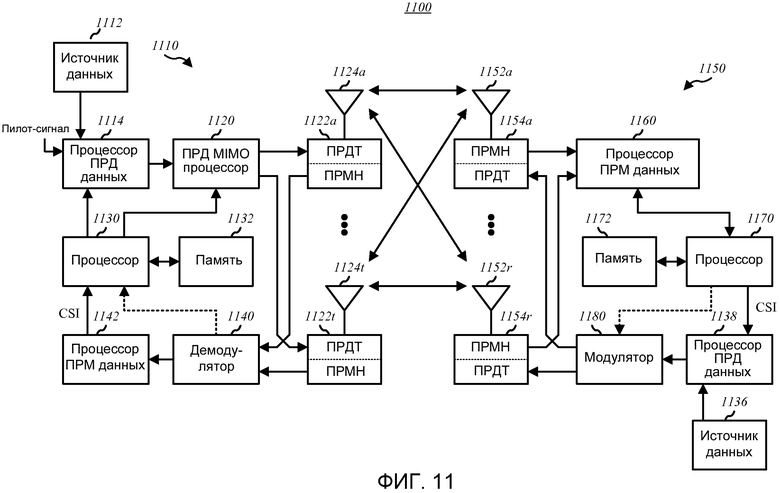
Согласно Фиг.11, система 1100 включает в себя систему 210 передатчика (также известную как точка доступа) и систему 1150 приемника (также известную как терминал доступа) в системе MIMO 1100. В системе передатчика 1110 данные трафика для множества потоков данных обеспечивают из источника данных 1112 к процессору 1114 передачи (ПРД) данных. Каждый поток данных передают по соответствующей передающей антенне. Процессор 1114 ПРД данных форматирует, кодирует и перемежает данные трафика для каждого потока данных, основываясь на определенной схеме кодирования, выбранной для этого потока данных для обеспечения кодированных данных.
Кодированные данные для каждого потока данных можно мультиплексировать с пилотными данными, используя методы OFDM. Пилотные данные обычно являются известным шаблоном данных, который обработан известным способом и может использоваться в системе приемника для оценки ответа канала. Мультиплексированные пилотные и кодированные данные для каждого потока данных затем модулируют (т.е. выполняют символьное сопоставление), основываясь на определенной схеме модуляции (например, BPSK, QSPK, M-PSK или M-QAM), выбранной для этого потока данных для обеспечения символов модуляции. Скорость передачи данных, кодирование и модуляцию для каждого потока данных можно определять с помощью команд, выполняемых процессором 1130.
Символы модуляции для всех потоков данных затем предоставляют ПРД MIMO процессору 1120, который может дополнительно обрабатывать символы модуляции (например, для OFDM). ПРД MIMO процессор 1120 затем обеспечивает NT потоков символов модуляции на NT передатчиков (ПРДТ) 1122a-1122t. В определенных вариантах осуществления ПРД MIMO процессор 1120 применяет весовые коэффициенты формирования диаграммы направленности к символам потоков данных и к антенне, от которой передают символ.
Каждый передатчик 1122 принимает и обрабатывает соответствующий поток символов для обеспечения одного или более аналоговых сигналов и дополнительно обрабатывает (например, усиливает, фильтрует и преобразовывает с повышением частоты) аналоговые сигналы для обеспечения модулированного сигнала, соответствующего передаче по каналу MIMO. NT модулированных сигналов от передатчиков 1122a-1122t затем передают от NT антенн 1124a-1124t, соответственно.
В системе приемника 1150 передаваемые модулированные сигналы принимают с помощью NR антенн 1152a-1152r, и принимаемый сигнал от каждой антенны 1152 предоставляют на соответствующий приемник (ПРМН) 1154a-1154r. Каждый приемник 1154 обрабатывает (например, фильтрует, усиливает и преобразовывает с понижением частоты) соответствующий принимаемый сигнал, оцифровывает обработанный сигнал, обеспечивает выборки и дополнительно обрабатывает выборки для обеспечения передачи «принимаемого» потока символов.
Процессор 1160 ПРМ данных затем принимает и обрабатывает NR принимаемых потоков символов от NR приемников 1154, основываясь на определенном методе обработки приемника для обеспечения NT «обнаруженных» потоков символов. Процессор ПРМ данных затем демодулирует 1160, деперемежает и декодирует каждый обнаруженный поток символов для восстановления данных трафика для потока данных. Обработка с помощью процессора 1160 ПРМ данных является обратной к обработке, выполняемой ПРД MIMO процессором 1120 и процессором 1114 ПРД данных в системе 1110 передатчика.
Процессор 1170 периодически определяет, какую матрицу предварительного кодирования следует использовать (обсуждается ниже). Процессор 1170 формулирует сообщение обратной линии связи, содержащее часть индекса матрицы и часть значения ранга. Сообщение обратной линии связи может содержать информацию различного вида, относящуюся к линии связи и/или к принимаемому потоку данных. Сообщение обратной линии связи затем обрабатывают с помощью процессора 1138 ПРД данных, который также принимает из источника данных 1136 данные трафика для множества потоков данных, модулируют с помощью модулятора 1180, приводят к определенному виду с помощью передатчиков 1154a-1154r и передают назад к системе 1110 передатчика.
В системе передатчика 1110 модулированные сигналы от системы приемника 1150 принимают с помощью антенн 1124, обрабатывают с помощью приемников 1122, демодулируют с помощью демодулятора 1140 и обрабатывают с помощью процессора 1142 ПРМ данных для извлечения сообщения обратной линии связи, передаваемого системой 1150 приемника. Процессор 1130 затем определяет, какую матрицу предварительного кодирования надо использовать для определения весовых коэффициентов формирования диаграммы направленности, и затем обрабатывает извлеченное сообщение.
Фиг.12 иллюстрирует систему, которая относится к обработке беспроводных сигналов. Система представлена как последовательность взаимодействующих функциональных блоков, которые могут представлять функции, осуществляемые процессором, программным обеспечением, аппаратными средствами, встроенным программным обеспечением или любой их соответствующей комбинацией.
Обеспечена система 1200 беспроводной связи. Система 1200 включает в себя логический модуль 1202 контроля состояния от средства управления DRX, и логический модуль 1204 сравнения параметра цикла DRX от средства управления DRX для многих субкадров. Система 1200 также включает в себя логический модуль 1206 декодирования номера системного кадра, основываясь частично на средстве управления DRX.
В одном из аспектов логические каналы классифицируют на каналы управления и каналы трафика. Логические каналы управления содержат широковещательный канал управления (BCCH), который является каналом DL для широковещания управляющей информации системы. Канал управления поискового вызова (PCCH), который является каналом DL, перемещает информацию поискового вызова. Канал управления многоадресной передачи (MCCH), который является каналом DL типа «из точки к множеству точек», используется для передачи информации планирования и управления услугой широковещательной и многоадресной передачи мультимедийных данных (MBMS) для одного или нескольких MTCH. В общем случае, после установления соединения RRC этот канал используется только теми UE, которые принимают MBMS (примечание: раньше MCCH+MSCH). Выделенный канал управления (DCCH) является двунаправленным двухточечным каналом, который передает выделенную информацию управления и используется UE, которые имеют соединения RRC. Логические каналы трафика содержат выделенный канал трафика (DTCH), который является двунаправленным двухточечным каналом, выделенным для одного UE, для перемещения пользовательской информации. Кроме того, канал трафика многоадресной передачи (MTCH) является каналом DL типа «из точки к множеству точек» для передачи данных трафика.
Транспортные каналы классифицируют на DL и UL. Транспортные каналы DL содержат широковещательный канал (BCH), совместно используемый канал данных нисходящей линии связи (DL-SDCH) и канал поискового вызова (PCH); PCH предназначен для обеспечения сигналов экономии мощности UE (цикл DRX указывают для UE с помощью сети), широковещательно передаваемых в ячейке и отображаемых на физические (PHY) ресурсы, которые могут использоваться для других каналов управления/трафика. Транспортные каналы UL содержат канал произвольного доступа (RACH), канал запроса (REQCH), совместно используемый канал данных восходящей линии связи (UL-SDCH) и множество физических каналов. Физические каналы содержат набор каналов DL и каналов UL.
Физические каналы DL содержат, например: общий пилотный канал (CPICH), канал синхронизации (SCH), общий канал управления (CCCH), совместно используемый канал управления DL (SDCCH), групповой канал управления (MCCH), совместно используемый канал назначения UL (SUACH), канал подтверждения (ACKCH), физический канал DL общих данных (DL-PSDCH), канал управления мощностью UL (UPCCH), канал индикатора поискового вызова (PICH) и канал индикатора нагрузки (LICH).
Физические (PHY) каналы UL содержат, например: физический канал произвольного доступа (PRACH), канал индикатора качества канала (CQICH), канал подтверждения (ACKCH), канал индикатора подмножества антенн (ASICH), совместно используемый канал запроса (SREQCH), совместно используемый физический канал данных UL (UL-PSDCH) и широкополосный пилотный канал (BPICH).
Другие термины/компоненты включают в себя: 3G - 3-е поколение, 3GPP - проект партнерства 3-го поколения, ACLR - коэффициент утечки соседнего канала, ACPR - коэффициент мощности соседнего канала, ACS - селективность соседнего канала, ADS - усовершенствованная система, AMC - адаптивная модуляция и кодирование, A-MPR - дополнительное максимальное сокращение мощности, ARQ - автоматический повторный запрос, BCCH - широковещательный канал управления, BTS - базовая приемопередающая станция, CDD - циклический разброс задержки, CCDF - дополнительная совокупная функция распределения, CDMA - множественный доступ с кодовым разделением, CFI - индикатор формата управления, Co-MIMO - совместно используемый MIMO, CP - циклический префикс, CPICH - общий пилотный канал, CPRI - обычный открытый радиоинтерфейс, CQI - индикатор качества канала, CRC (ЦИК) - контроль с помощью циклического избыточного кода, DCI - индикатор управления нисходящей линии связи, DFT - дискретное преобразование Фурье, DFT-SOFDM - расширение спектра OFDM с помощью дискретного преобразования Фурье, DL - нисходящая линия связи (передача от базовой станции к абоненту), DL-SCH - совместно используемый канал нисходящей линии связи, D-PHY - физический уровень со скоростью 500 Мбит/с, DSP - цифровая обработка сигналов, DT - комплект инструментальных средств разработки, DVSA - цифровой векторный анализ сигнала, EDA - автоматизация электронной разработки, E-DCH - усовершенствованный выделенный канал, E-UTRAN - усовершенствованная наземная сеть радиодоступа UMTS, eMBMS - усовершенствованная услуга широковещательной многоадресной передачи мультимедийных данных, eNB - усовершенствованный узел B, EPC - основная часть усовершенствованного пакета, EPRE - мощность элемента ресурса, ETSI - европейский институт стандартов связи, E-UTRA - усовершенствованный UTRA, E-UTRAN - усовершенствованный UTRAN, EVM - величина вектора ошибки и FDD - дуплексная связь с частотным разделением.
Другие термины включают в себя FFT - быстрое преобразование Фурье, FRC - фиксированный эталонный канал, FS1 - структура кадра типа 1, FS2 - структура кадра типа 2, GSM - глобальная система мобильной связи, HARQ - гибридный автоматический запрос повторной передачи, HDL - язык описания аппаратных средств, HI - индикатор HARQ, HSDPA - высокоскоростной пакетный доступ нисходящей линии связи, HSPA - высокоскоростной пакетный доступ, HSUPA - высокоскоростной пакетный доступ восходящей линии связи, IFFT - обратное FFT, IOT - тест функциональной совместимости, IP - Интернет-протокол, LO - локальный генератор, LTE - долгосрочное развитие, MAC - управление доступом к среде, MBMS - услуга широковещательной многоадресной передачи мультимедийных данных, MBSFN - многоадресная передача/широковещание по одночастотной сети, MCH - канал многоадресной передачи, MIMO - с множеством входов и множеством выходов, MISO - с множеством входов и одним выходом, MME - объект управления мобильностью, MOP - максимальная выходная мощность, MPR - уменьшение максимальной мощности, MU-MIMO - многопользовательский MIMO, NAS - уровень отсутствия доступа, OBSAI - открытый интерфейс архитектуры базовой станции, OFDM - мультиплексирование с ортогональным частотным разделением, OFDMA - множественный доступ с ортогональным частотным разделением, PAPR - отношение пиковой мощности к среднему значению мощности, PAR - отношение пикового значения к среднему значению, PBCH - физический канал широковещания, P-CCPCH - первичный общий физический канал управления, PCFICH - физический канал индикатора формата управления, PCH - канал поискового вызова, PDCCH - физический канал управления нисходящей линии связи, PDCP - протокол конвергенции пакетных данных, PDSCH - физический совместно используемый канал нисходящей линии связи, PHICH - физический гибридный канал индикатора ARQ, PHY - физический уровень, PRACH - физический канал произвольного доступа, PMCH - физический групповой канал, PMI - индикатор матрицы предварительного кодирования, P-SCH - первичный сигнал синхронизации, PUCCH - физический канал управления восходящей линии связи и PUSCH - совместно используемый физический канал восходящей линии связи.
Другие термины включают в себя: QAM - квадратурная амплитудная модуляция, QPSK - квадратурная фазовая манипуляция, RACH - канал произвольного доступа, RAT - технология радиодоступа, RB - блок ресурсов, RF - радиочастота, RFDE - RF среда проектирования, RLC - управление линией радиосвязи, RMC - канал эталонного измерения, RNC - контроллер сети радиодоступа, RRC - контроль радиоресурсов, RRM - управление радиоресурсами, RS - эталонный сигнал, RSCP - мощность кода принимаемого сигнала, RSRP - мощность принимаемого эталонного сигнала, RSRQ - качество принимаемого эталонного сигнала, RSSI - индикатор мощности принимаемого сигнала, SAE -развитие архитектуры системы, SAP - точки доступа к службам, SC-FDMA - множественный доступ с частотным разделением с одной несущей, SFBC - пространственно-частотное блочное кодирование, S-GW - обслуживающий шлюз, SIMO - с одним входом и множеством выходов, SISO - с одним входом и одним выходом, SNR - отношение сигнал-шум, SRS - эталонный зондирующий сигнал, S-SCH - вторичный сигнал синхронизации, SU-MIMO - однопользовательский MIMO, TDD - дуплексная связь с временным разделением, TDMA - множественный доступ с временным разделением, TR - технический отчет, TrCH - транспортный канал, TS - техническая спецификация, TTA - ассоциация технологий передачи данных, TTI - временной интервал передачи данных, UCI - индикатор управления восходящей линии связи, UE - пользовательское устройство, UL -восходящая линия связи (передача от абонента к базовой станции), UL-SCH - совместно используемый канал восходящей линии связи, UMB - ультрамобильная широкополосная передача, UMTS - универсальная система мобильной связи, UTRA - универсальный наземной радио-доступ, UTRAN - универсальная наземная сеть с радиодоступом, VSA - анализатор векторного сигнала, W-CDMA - широкополосный множественный доступ с кодовым разделением.
Следует отметить, что различные аспекты описаны в данной работе в связи с терминалом. Терминал может также упоминаться как система, пользовательское устройство, абонентский блок, абонентская станция, подвижная станция, мобильное устройство, удаленная станция, удаленный терминал, терминал доступа, пользовательский терминал, пользовательский агент или пользовательское оборудование. Пользовательское устройство может быть мобильным телефоном, радиотелефоном, телефоном протокола инициирования сеанса (SIP), станцией беспроводной местной линии (WLL), КПК, карманным устройством, имеющим возможность беспроводной связи, модулем в терминале, картой, которая может быть присоединена или интегрирована в основное устройство (например, карта PCMCIA) или другим устройством обработки, связанным с беспроводным модемом.
Кроме того, аспекты заявляемого объекта изобретения можно воплощать как способ, устройство или изделие, используя стандартные методики программирования и/или конструирования для создания программного обеспечения, встроенного программного обеспечения, аппаратных средств или любой их комбинации для управления компьютером или вычислительными компонентами для осуществления различных аспектов заявляемого объекта изобретения. В данной работе термин «изделие» охватывает компьютерную программу, доступную с любого считываемого компьютером устройства, несущей или носителя. Например, считываемый компьютером носитель может включать в себя магнитные запоминающие устройства (например, жесткий диск, гибкий диск, магнитные полосы...), оптические диски (например, компакт-диск (CD), цифровой универсальный диск (DVD)...), интеллектуальные карты и устройства флэш-памяти (например, карты и устройства на основе флеш-памяти...), но не ограничен ими. Дополнительно, следует признать, что несущая может использоваться для переноса считываемых компьютером электронных данных, таких как данные, используемые при передаче и приеме голосовой почты или при доступе к сети, такой как сеть сотовой связи. Конечно, специалисты найдут множество изменений, которые можно сделать к этой конфигурации, не отступая от объема и формы описанного в данной работе.
Приведенное выше описание включает в себя примеры одного или большего количества вариантов осуществления изобретения. Конечно, невозможно описать все мыслимые комбинации компонентов или методологий в целях описания указанных выше вариантов осуществления, но специалистам должно быть понятно, что возможно множество дополнительных комбинаций и изменений различных вариантов осуществления. Соответственно, описанные варианты осуществления охватывают все такие изменения, модификации и разновидности, которые находятся в пределах объема и формы прилагаемой формулы изобретения. Кроме того, в степени, в которой термин «включает в себя» используется в подробном описании или в формуле изобретения, этот термин является содержащим, аналогично термину «содержащий», как «содержащий» интерпретируется при использовании в качестве переходного слова в формуле изобретения.








Изобретение относится к системам беспроводной связи и предназначено для корректировки времени идентификации новой ячейки в беспроводных приемниках для обеспечения обнаружения ячейки во время периодов мобильности и обеспечения приемлемого времени для экономии мощности. Изобретение раскрывает способ идентификации ячейки. Способ включает в себя определение в беспроводном устройстве состояния приема и сравнение в беспроводном устройстве цикла приема с параметром субкадра. Способ также включает в себя идентификацию следующей беспроводной ячейки в течение предварительно определенного времени сравнения. 3 н. и 10 з.п. ф-лы, 1 табл., 12 ил.
1. Способ идентификации ячейки, содержащий этапы:
определяют состояние прерывистого приема (DRX), связанное с активным состоянием нисходящей линии связи, в беспроводном устройстве;
сравнивают цикл DRX с пороговым значением интегрального числа (X) подкадров в беспроводном устройстве; и
идентифицируют и декодируют параметр номера системного кадра (SFN) новой обнаруживаемой беспроводной ячейки в пределах предварительно определенного времени (A, B) сравнения, причем предварительно определенное время (A, B) зависит от результатов сравнения.
2. Способ по п.1, в котором предварительно определенное время (A, B) динамически корректируют для учета скорости перемещения или факторов окружающей среды.
3. Способ по п.1, в котором предварительно определенное время (A, B) имеет диапазон от приблизительно 800 мс до приблизительно 3 с.
4. Способ по п.1, в котором предварительно определенное время является первым периодом (A), когда определяется, что цикл DRX меньше порогового числа (X) подкадров, и в котором предварительно определенное время является вторым периодом (B), когда определяется, что цикл DRX равен или больше порогового числа (X) подкадров, причем второй период (B) больше, чем первый период (A).
5. Способ по п.1, дополнительно содержащий анализ параметра скорости, параметра времени от обнаружения, параметра обновления или параметра шума, чтобы определить предварительно определенное время (A, B).
6. Способ по п.5, дополнительно содержащий анализ параметра активного набора для определения предварительно определенного времени (A, B).
7. Способ по п.1, дополнительно содержащий обнаружение ячейки, основываясь частично на параметре общего пилотного канала (CPICH).
8. Способ по п.7, дополнительно содержащий обработку, по меньшей мере, одного кода синхронизации, чтобы определить упомянутое обнаружение.
9. Считываемый компьютером носитель, содержащий коды для побуждения процессора выполнять способ по любому из предшествующих пунктов.
10. Устройство беспроводной связи, содержащее:
средство для определения состояния прерывистого приема (DRX), связанного с активным состоянием нисходящей линии связи;
средство для сравнения цикла DRX с пороговым значением интегрального числа (X) подкадров; и
средство для идентификации и декодирования параметра номера системного кадра (SFN) новой обнаруживаемой беспроводной ячейки в пределах предварительно определенного времени (A, B) сравнения, причем предварительно определенное время (A, B) зависит от результатов сравнения.
11. Устройство по п.10, включающее в себя средство для динамической корректировки предварительно определенного времени для учета скорости перемещения или факторов окружающей среды.
12. Устройство по п.10, в котором предварительно определенное время находится в диапазоне от приблизительно 800 мс до приблизительно 3 с.
13. Устройство по п.10, включающее в себя средство для задания предварительно определенного времени равным первому периоду (A), когда цикл DRX меньше порогового числа (X) подкадров, и для установки предварительно определенного времени равным второму периоду (B), когда цикл DRX равен или больше порогового числа (X) подкадров, причем второй период (B) больше, чем первый период (A).
| Устройство для изготовления стружечных,волокнистых или подобных им плит | 1982 |
|
SU1313336A3 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| РЕЖИМ ПЕРЕМЕННОГО НЕАКТИВНОГО СОСТОЯНИЯ ДЛЯ МОБИЛЬНЫХ СТАНЦИЙ В СЕТИ МОБИЛЬНОЙ СВЯЗИ | 1999 |
|
RU2241316C2 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |

