Изобретение относится к технике измерения параметров электрических машин и может найти применение в установках электроцентробежных насосов (УЭЦН), добывающих нефть из глубинных скважин и использующих в качестве привода погружные асинхронные электродвигатели (ПЭД) с короткозамкнутым ротором.
Известны способы косвенного определения скорости вращения асинхронных двигателей, при которых информация о скорости получается из математической модели двигателя, заданной в виде системы дифференциальных уравнений, путем применения итерационных методов, наблюдателя высокого порядка и других методов расчета (Bose В.К. Modern Power Electronics and AC Drivers. - Prentice Hall, 2002; Волков А.В. Идентификация потокосцепления ротора частотно-регулируемого асинхронного двигателя // Электротехника. 2002. №6. С.40-46). Косвенные способы определения скорости вращения в настоящее время недостаточно разработаны и не обладают необходимой точностью из-за режимных и температурных изменений параметров реального двигателя, несинусоидальности формы статорных токов и влияния кабеля большой длины в случае глубинных УЭЦН.
Известны также механический, оптический, электрический и другие способы прямых измерений скорости вращения валов, механизмов и электродвигателей. Устройства, реализующие механический способ, имеют малую точность и низкую надежность; устройства, реализующие оптический способ, при своей высокой точности измерения очень сложны и неудобны в эксплуатации (Патент Великобритании №1396889, кл. G1A, 1974 г.). Наиболее современными, простыми, удобными и точными являются электрические способы, использующие явление электромагнитной индукции. Известен способ (Карпов Р.Г. Электроника в испытаниях тепловых двигателей. - М.: Машгиз, 1963. С.103-111), по которому получают частотную последовательность импульсов эдс в расположенной на постоянном магните неподвижной сигнальной обмотке за счет пересечения ферромагнитной вставкой, укрепленной на вращающемся валу, поля постоянного магнита, полученную последовательность преобразуют в последовательность импульсов с постоянной длительностью и амплитудой, а эту последовательность импульсов преобразуют далее в аналоговое напряжение, величина которого пропорциональна скорости вращения. Из-за двойного преобразования частотной последовательности импульсов эдс снижается точность способа измерений; кроме того, требуется дополнительное преобразование аналогового выходного напряжения в цифровой код для согласования данного способа измерений с современными системами контроля и управления.
Наиболее близким к заявляемому способу по технической сущности и достигаемым результатам является способ (Агейкин Д.И. и др. Датчики контроля и регулирования. - М.: Машиностроение, 1965, С.466-468; Утямышев Р.И. Техника измерений скоростей вращения. М-Л., 1961. С.7-8), в соответствии с которым возбуждают магнитное поле постоянным магнитом, расположенным на вращающемся валу, получают частотную последовательность импульсов эдс за счет пересечения полем постоянного магнита на каждом обороте вала витков неподвижно установленной сигнальной обмотки, обрабатывают индуцированную последовательность импульсов путем заполнения их импульсами стабильной высокой частоты, по числу которых за единицу времени определяют скорость вращения (АС СССР №449302, G01p 3/54, 05.11.74).
Недостатком прототипа является сложность реализации в асинхронных ПЭД глубинно-насосных нефтедобывающих УЭЦН, связанная с особенностями конструкции и условиями эксплуатации ПЭД (см. приложение 1), из-за которых установка на его валу частотного датчика индукционного типа с вращающимся постоянным магнитом и неподвижной многовитковой сигнальной обмоткой существенно усложнит его конструкцию и уменьшит надежность. Кроме того, для передачи в наземную станцию управления частотной последовательности импульсов эдс потребуется измерительная многокилометровая (1,5…3,7 км) кабельная линия, которая, как и силовой электропитающий кабель, должна обладать нефтегазостойкостью, допускать работу в агрессивной среде при окружающей температуре 95-110°С и пластовом давлении до 20 МПа, иметь бронезащиту от механических повреждений и большое усилие на разрыв. Размещение такого кабеля вместе с силовым на погружном двигателе в ограниченном объеме действующих нефтяных глубинно-насосных скважин, как правило, практически невозможно.
Задачей настоящего изобретения является упрощение реализации способа в асинхронных ПЭД глубинных нефтедобывающих УЭЦН.
Поставленная задача достигается за счет того, что в способе определения скорости вращения, по которому устанавливают на валу электродвигателя постоянный магнит и получают частотную последовательность импульсов эдс, согласно изобретению размещают на валу погружного асинхронного электродвигателя на немагнитных диэлектрических шайбах, находящихся по торцевым сторонам k немагнитных промежуточных подшипников ротора и имеющих диаметр, совпадающий с диаметром его пакетов 4k четырехполюсных магнитов с радиально намагниченными разнополярными зонами, устанавливают на каждой шайбе по окружности диаметрально противоположно два магнита, обращенные друг к другу одноименными полюсами, ориентируют все пары магнитов на шайбах при сборке ротора строго в одном направлении, получают в трехфазной обмотке статора при вращении ротора частотные последовательности импульсов эдс, а в фазах силового кабеля, питающего ПЭД, частотные последовательности импульсов тока, трансформируют наземным измерительным трансформатором тока частотную последовательность импульсов фазного тока и синусоидальный ток, потребляемый ПЭД от трехфазного питающего напряжения, выделяют частотную последовательность импульсов напряжения, пропорциональную частотной последовательности импульсов фазного тока, фильтрацией выходного напряжения трансформатора посредством полосового фильтра, имеющего граничные частоты пропускания z·ƒmin и z·ƒmax, формируют из выделенной частотной последовательности импульсов с помощью компаратора напряжений и делителя частоты новую последовательность прямоугольных импульсов напряжения, частота повторения которых понижена в z раз и совпадает с частотой вращения ротора ПЭД, где z - количество пазов у магнитопровода статора ПЭД, ƒmin и ƒmax - минимально и максимально допустимые частоты вращения ПЭД в УЭЦН (приложение 1).
Указанная совокупность операций, отличающаяся от известной и не применявшаяся ранее, позволяет получить новый технический результат, который заключается в том, что измерение скорости вращения ПЭД осуществляется без установки на его валу индукционного датчика скорости, функцию которого выполняют конструктивные элементы ПЭД, что упрощает передачу результатов измерений на поверхность и облегчает их съем простым подключением трансформатора тока к фазе наземного участка электропитающего кабеля.
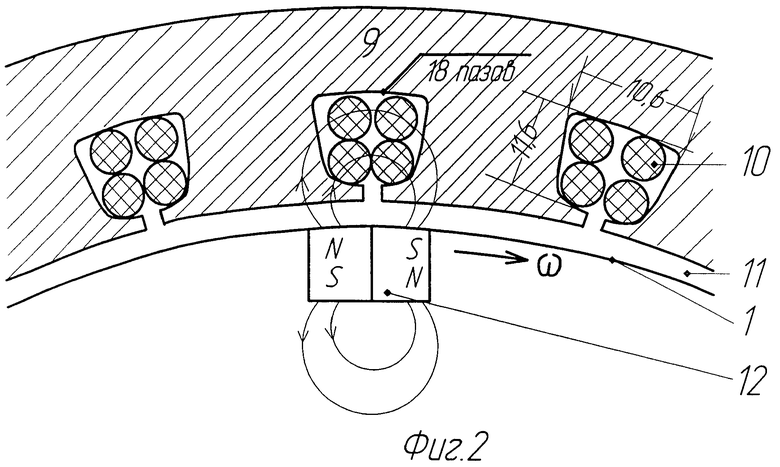
Изобретение поясняется прилагаемыми чертежами, где на фиг.1 изображена структурная схема реализации способа, на фиг.2 представлен рисунок для пояснения формирования импульсов эдс в проводниках протяжной обмотки статора ПЭД габарита 117, на фиг.3 приведены временные диаграммы функционирования элементов структурной схемы. Она содержит немагнитную диэлектрическую шайбу 1, трехфазную обмотку статора ПЭД 2, силовую электропитающую кабельную линию 3, измерительный трансформатор тока 4, сопротивление 5, полосовой фильтр 6, компаратор напряжений 7 и делитель частоты 8. Две фазы обмотки статора 2 подключены через кабельную линию 3 к двум фазам Ua, Ub трехфазного синусоидального источника напряжений, третья фаза обмотки статора 2 подключена к третьей фазе Uc источника через кабельную линию 3 и первичную обмотку измерительного трансформатора тока 4. Вторичная обмотка трансформатора 4 нагружена на сопротивление 5 и соединена со входами полосового фильтра 6, его выход подключен ко входу компаратора напряжений 7, выход компаратора 7 соединен со входом делителя частоты 8, а выход делителя 8 является выходом схемы, при этом один из выводов вторичной обмотки трансформатора тока 4 заземлен.
На фиг.2 представлен немагнитный пакет статора 9, проводники 10 протяжной обмотки, проходящие через пазы немагнитного пакета статора 9, воздушный зазор 11 между немагнитной диэлектрической шайбой ротора 1 и немагнитным пакетом статора 9, четырехполюсный магнит 12 с радиально намагниченными разнополярными зонами.
При реализации способа определения скорости вращения ПЭД осуществляют следующие действия. Устанавливают на валу ПЭД при выполнении профилактических или ремонтных работ 4k четырехполюсных магнитов 12 с радиально намагниченными разнополярными зонами, имеющими намагничивающую силу, достаточную для воздействия через воздушный зазор 11 (доли миллиметра, табл.2, приложение 1) при вращении ротора на проводники 10 обмотки статора. Размещают магниты 12 парами на диэлектрических шайбах 1 (фиг.1) по их окружности диаметрально противоположно таким образом, что магниты одной пары расположены друг относительно друга одноименными полюсами. Диэлектрические шайбы являются конструктивными элементами ПЭД (фиг.6, приложение 1), имеют диаметр, равный диаметру пакетов ротора, и находятся по торцевым сторонам k немагнитных промежуточных подшипников ротора.
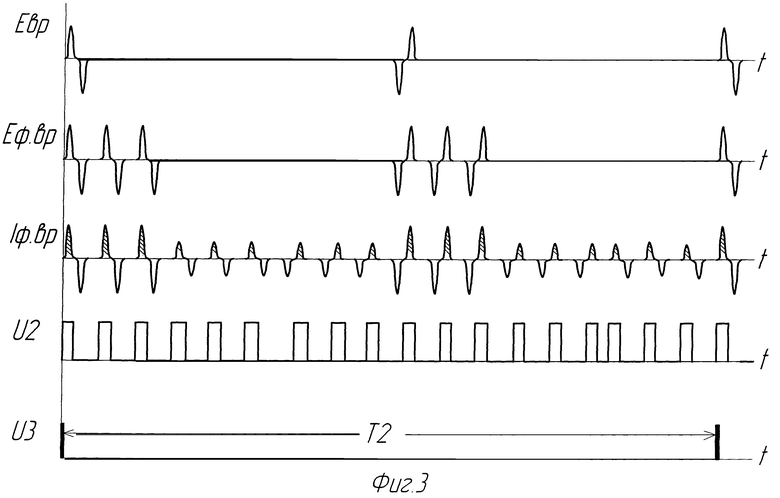
Ориентируют все пары магнитов на шайбах при сборке ротора ПЭД строго в одном направлении для достижения синхронного и синфазного движения поля каждого из вращающихся магнитов относительно проводников 10 обмотки статора, проходящих через пазы его немагнитных пакетов. Получают в проводниках 10 обмотки статора (например обмотки фазы С) частотную последовательность импульсов разнополярных эдс Евр (фиг.3), претерпевающих инверсию через интервал времени 0,5Т2, где Т2 - период вращения ротора ПЭД. Временная форма этих эдс сложным образом зависит от пространственного распределения магнитного поля, от угловой скорости вращения ω (фиг.2) ротора ПЭД, от геометрии паза, от взаимного расположения магнита 12 и паза, от размеров магнитов, поэтому угловые и радиальные размеры вмонтированных магнитных вставок определяют опытным путем для получения у индуцированных эдс Евр временной формы, по возможности близкой к синусоидальной. В связи с тем, что приращения потокосцепления в проводниках 10 при синхронном и синфазном приближении 4k магнитных вставок к пазу и при удалении от него имеют одинаковые по величине и противоположные по знаку значения, независящие от угловой скорости вращения ω ротора, получают одинаковые по величине вольтсекундные площади у положительного и у отрицательного импульсов индуцированной разнополярной эдс Евр. Это важное свойство обеспечивает преобразование импульсов тока в трансформаторе 4 и в полосовом фильтре 6 без методической погрешности, возникающей в этих элементах структурной схемы тогда, когда импульсы тока в фазе протяжной обмотки ПЭД имеют постоянную составляющую, не равную нулю, а также когда ее величина изменяется из-за изменений амплитуды у этих импульсов.
Получают в фазе С протяжной обмотки ПЭД, распределенной по z/3 пазам пакетов статора, частотную последовательность индуцированных эдс в виде серии импульсов Еф.вр (фиг.3), претерпевающих инверсию через интервал времени 0,5T2 и равных на основании закона электромагнитной индукции

где В - магнитная индукция, Т; d - толщина диэлектрической шайбы, м; ν - скорость движения магнитов, м/ с (направления В и ν взаимно перпендикулярны); n - число эффективных проводников в пазу магнитопровода статора ПЭД.
Получают в трех фазах протяжной обмотки статора при вращении ротора три индуцированные последовательности импульсов эдс Еф.вр, смещенные относительно друг друга на угол 120° и создающие в фазе С трехпроводного электропитающего кабеля частотные последовательности импульсов тока Iф.вр (фиг.3), состоящие из z импульсов тока, повторяющихся с частотой вращения ротора ПЭД. Амплитуда у z/3 импульсов примерно в 2 раза больше, чем у 2z/3 импульсов тока, т.к. последние в фазе с образованы за счет действия эдс, индуктированных в обмотки фаз А и В статора ПЭД.
Трансформируют с помощью измерительного трансформатора тока 4 частотную последовательность импульсов тока Iф.вр вместе с фазным током, потребляемым ПЭД от трехфазного источника Ua, Ub, Uc и превышающим на два-три порядка импульсы тока Iф.вр. Для этого включают первичную обмотку измерительного тансформатора тока 4 в фазу наземного участка электропитающего кабеля 3, а вторичную обмотку нагружают на сопротивление 5 и заземляют одним выводом. Получают в сопротивлении 5 синусоидальное напряжение, пропорциональное току, потребляемому ПЭД от трехфазного источника Ua, Ub, Uc, и частотную последовательность импульсов напряжений, пропорциональную частотной последовательности импульсов тока Iф.вр в фазе С кабеля 3.
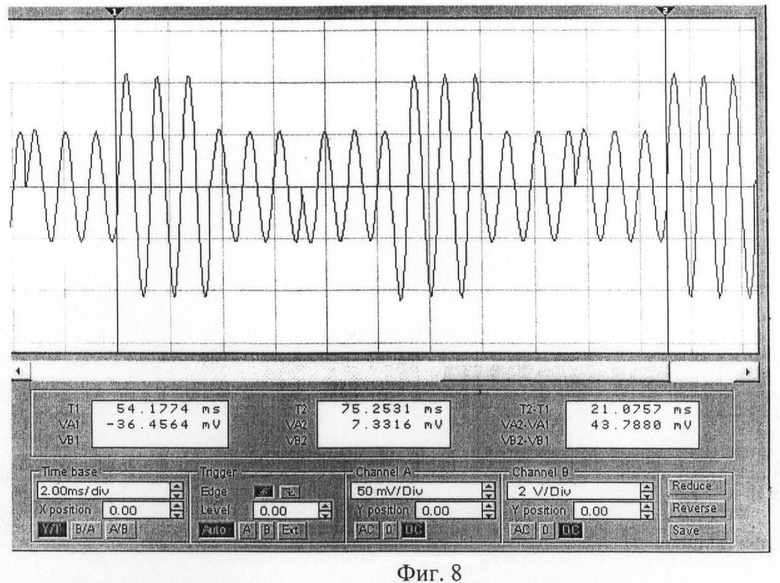
Отделяют вторую составляющую выходного напряжения трансформатора тока 4 от первой синусоидальной составляющей фильтрацией выходного напряжения посредством полосового фильтра 6 с граничными частотами полосы пропускания z·ƒmin и z·ƒmax и спадом амплитудно-частотной характеристики за граничными частотами, составляющим не менее 80 дБ/дек. Фильтр такого рода обеспечивает уверенное отделение частотных импульсов (фиг.8, приложение 2) напряжения

(ki и kф - передаточные коэффициенты трансформатора тока и фильтра) амплитудой в десятки милливольт, во-первых, от превосходящего на два-три порядка синусоидального напряжения, частота которого может изменяться с помощью преобразователя частоты станции управления глубинными УЭЦН в пределах от ƒmin до ƒmax, т.е. от 40 Гц до 60 Гц (см. приложение 1) и, во-вторых, от паразитных напряжений с частотами 5…15 кГц, создаваемых частотным преобразователем.
Преобразуют частотные импульсы напряжения U1 в последовательность прямоугольных импульсов U2 (фиг.3) с помощью компаратора напряжений 7.
Формируют из последовательности прямоугольных импульсов напряжения U2 последовательность импульсов U3 на выходе схемы (фиг.1), частота повторения которых понижена с помощью делителя частоты 8 в z раз и совпадает с частотой вращения короткозамкнутого ротора ПЭД.
Новым в заявляемом способе является размещение на немагнитных конструктивных элементах ротора ПЭД - диэлектрических шайбах постоянных магнитов, ориентированных при сборке ПЭД строго в определенном направлении. Это техническое решение, не вытекающее для специалиста из известного уровня техники, создает в проводниках протяжной трехфазной обмотки статора частотную последовательность импульсов эдс с амплитудой (ф-ла 6, приложение 2), позволяющей использовать обмотку статора ПЭД для определения скорости вращения его короткозамкнутого ротора.
Техническое преимущество способа в сравнении с прототипом и с другими известными способами, реализуемыми в различных датчиках скорости, состоит в том, что передача результатов измерения в станцию управления УЭЦН по предлагаемому способу осуществляется силовым электропитающим кабелем ПЭД без применения специального измерительного многокилометрового кабеля, размещение которого вместе с силовым кабелем в ограниченном пространстве глубинно-насосных скважин, как правило, практически невозможно. Реализация способа не связана, в отличие от прототипа, с существенным усложнением конструкции и снижением надежности ПЭД.
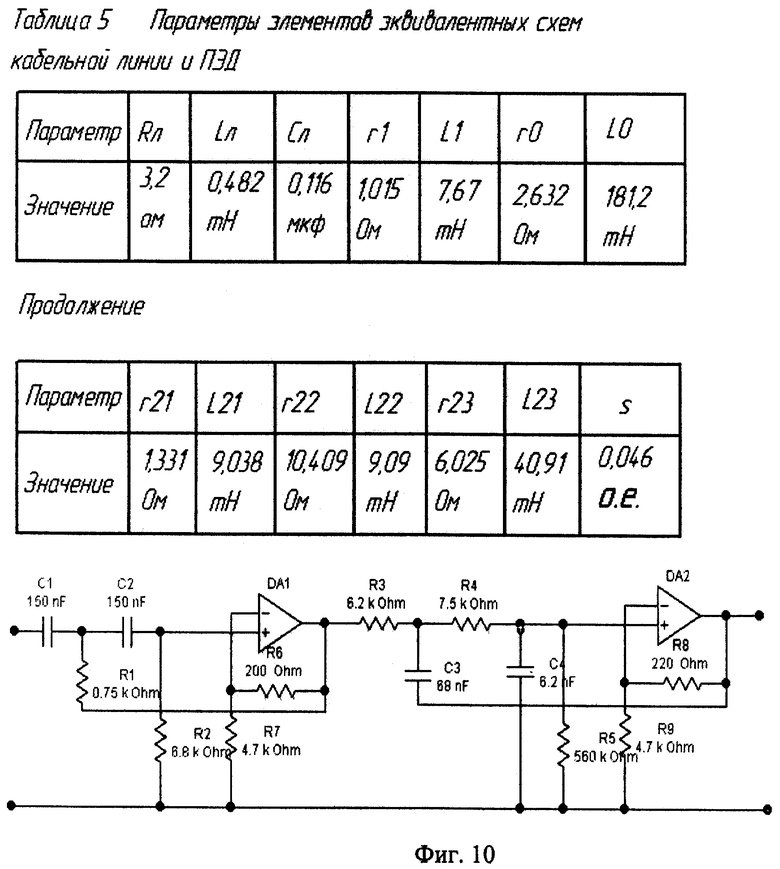
Все это подтверждает техническую и экономическую эффективность способа, реализация которого может быть выполнена с использованием высококоэрцитивных, термостойких постоянных магнитов из самарий-кобальта и ниодим-железо-бора с намагничивающей силой порядка 6·104 кA/м, скважинной кабельной линии типа КПБК и удлинителя типа КПБП, стандартного однофазного измерительного трансформатора тока, например ТНШ-0,66-УЗ (ТЗ), полосового фильтра, построенного на RC-элементах и операционных усилителях (фиг.10, приложение 2), компаратора напряжения на аналоговых интегральных микросхемах типа КР521СА3 и др. и делителя частоты на цифровых интегральных микросхемах типа КР1533ИЕ7 и др.
Способ может найти применение в частотно-регулируемом энергосберегающем электроприводе для прямого измерения скорости вращения асинхронных ПЭД глубиннонасосных УЭЦН.
Приложение 1
Конструкция и характеристики погружных электрических двигателей
Основным видом погружных электродвигателей для привода электроцентробежных насосов (Богданов А.А. Погружные центробежные насосы для добычи нефти. - М.: Недра, 1968. С.131…163; Ивановский В. Н., Пекин С.С., Сабиров А.А. Установки погружных центробежных насосов для добычи нефти. - М.: ГУП. Изд-во «Нефть и газ», 2002. С.65…86) являются асинхронные маслозаполненные с короткозамкнутым ротором электродвигатели вертикального исполнения, выполненные в стальном корпусе цилиндрической формы. ПЭД работают в агрессивной среде пластовой жидкости при высокой окружающей температуре (95-110°С), пластовом давлении порядка 20 МПа и в ограниченном объеме: наружный диаметр электродвигателя определяется внутренним диаметром обсадной колонны нефтяной скважины и находится в пределах 96…138 мм. Мощность электродвигателей достигает 500 кВт. Малые диаметры и большие мощности вызывают необходимость увеличивать длину электродвигателей. Например, электродвигатель серии ПЭД диаметром 123 мм мощностью 75 кВт имеет длину 8062 мм. Погружные электродвигатели изготавливают двухполюсными (шаг витков секций обмотки статора 180°) на скорость вращения 3000 синхронных об/мин при номинальной частоте тока статора 50 Гц. Кроме того, они должны обладать высокой надежностью, отдавать максимальную полезную мощность в условиях ограниченного объема и поэтому имеют ряд особенностей.
Для уменьшения потерь в многокилометровом кабеле, питающем ПЭД, улучшения условий запуска и технических характеристик ПЭД электродвигатели выполняются на повышенные напряжения, значительно превышающие напряжение силовой сети 380 В. Напряжение ПЭД зависит от мощности, диаметральных размеров, ряда других условий и составляет от 500 до 3000 В. Это привело к необходимости применения специальных промысловых трансформаторов, повышающих выходное напряжение станций управления. Кроме того, поскольку длина подвески электронасоса в скважине колеблется в больших пределах, соответственно будут колебаться и потери напряжения в кабельной линии. Поэтому для обеспечения на зажимах ПЭД рабочего напряжения с допустимым отклонением ±5% от номинальной величины промысловые трансформаторы выполняются с многоступенчатой регулировкой (до 32 ступеней) напряжения с высокой стороны.
Для управления режимом добычи нефти применяется энергосберегающее частотное регулирование скорости вращения ПЭД, которое осуществляется с помощью частотных преобразователей, устанавливаемых на станциях управления работой УЭЦН. Диапазон регулирования скорости вращения ПЭД регламентируется заводами-изготовителями, а также ТУ-3381-026-21945400-97, по которому допускается продолжительная работа ПЭД в УЭЦН от минимальной частоты вращения fmin≥40 Гц до максимальной fmax≤60 Гц. При этом максимальная частота ограничивается, как правило, мощностью электронасоса, а минимальная - возможностью срыва подачи пластовой жидкости из глубины скважины на поверхность.
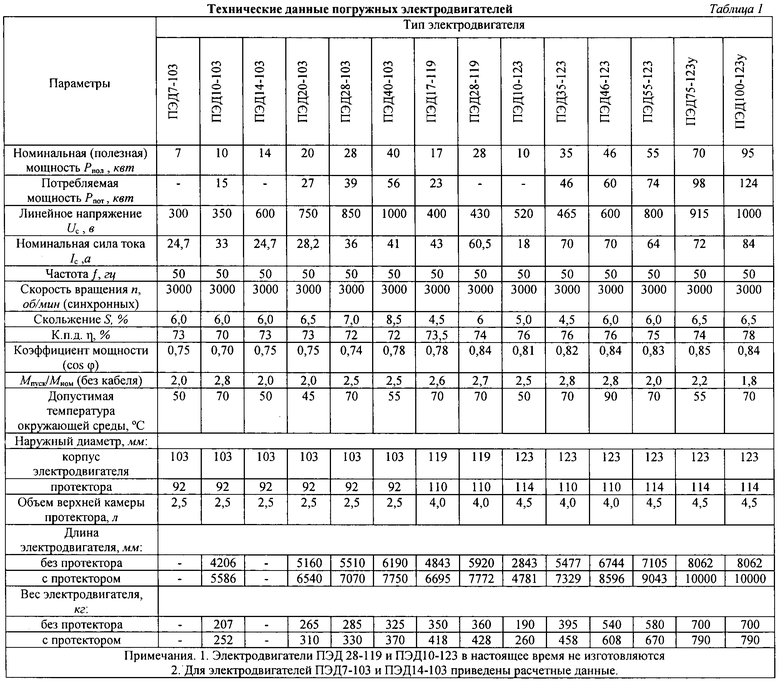
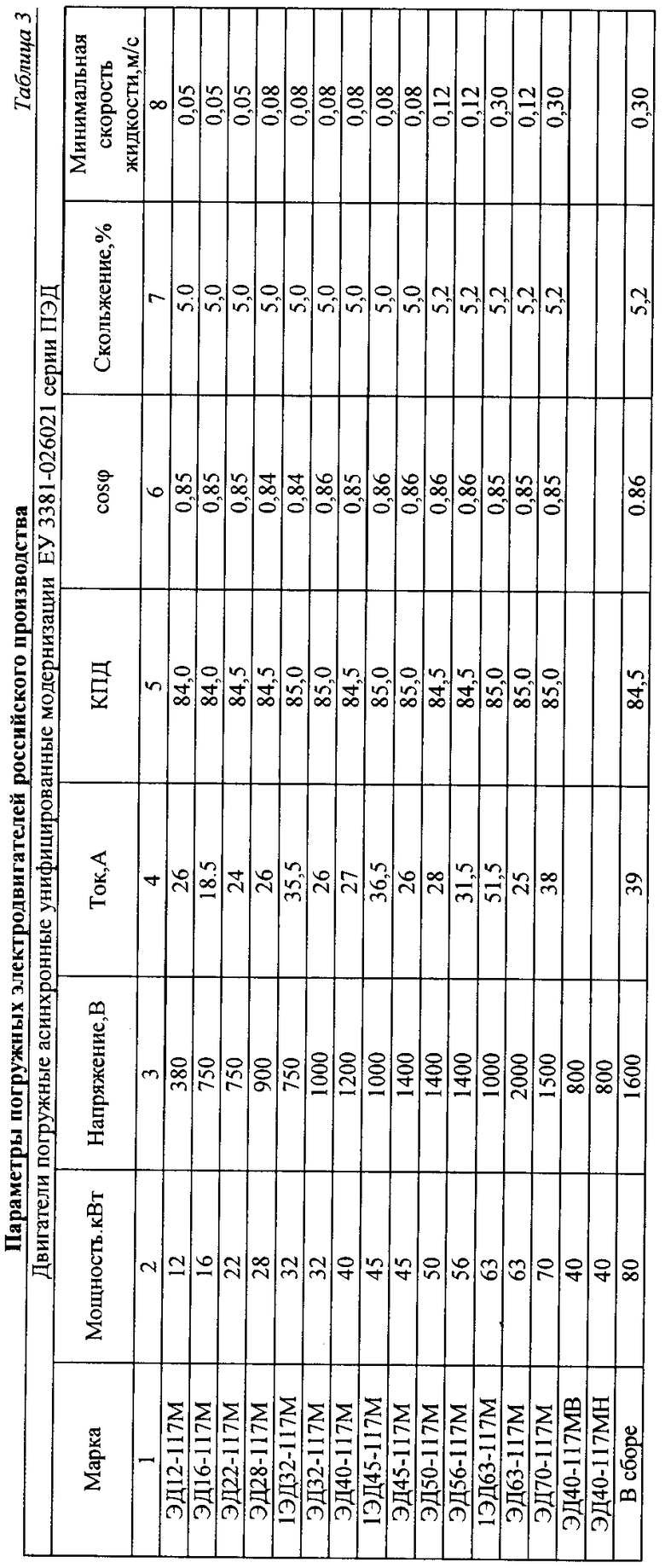
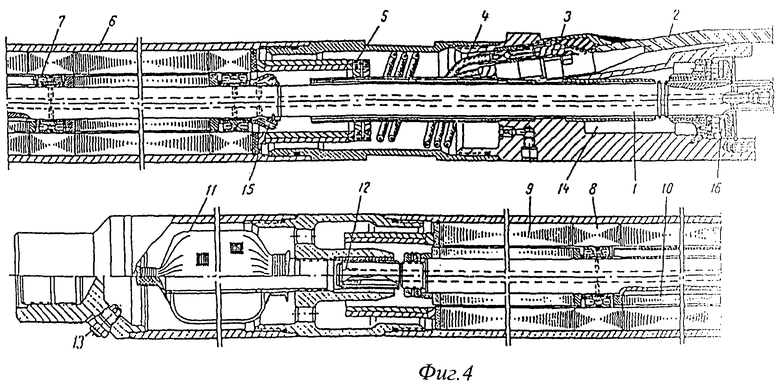
Основные технические данные погружных электродвигателей, находящихся в эксплуатации на промыслах, приведены в таблице 1. Технические данные погружных электродвигателей российского производства даются в таблице 3. Конструкция электродвигателя серии ПЭД представлена на фиг.4, где приняты следующие обозначения: 1 - вал; 2 - плоский кабель; 3 - штепсельная муфта; 4 - выводные концы обмотки статора; 5 - обмотка статора; 6 - корпус статора; 7 - промежуточный подшипник; 8 - немагнитный пакет статора; 9 - активный пакет статора; 10 - ротор двигателя; 11 - масляный фильтр; 12 - отверстие внутри вала для циркуляции масла; 13 - обратный клапан для заполнения двигателя маслом; 14 - отстойник; 15 - турбинка для циркуляции масла; 16 - опорная пята.
Основными элементами конструкции электродвигателя являются статор и ротор. Статор ПЭД состоит из активных пакетов 9, набранных из отдельных листов отожженной электротехнической стали Э12 или Э13 и из немагнитных пакетов 8, отштампованных из латуни или из немагнитной нержавеющей стали. Немагнитные пакеты служат опорами для подшипников ротора.
Длина активного пакета определяется расстоянием между подшипниками 7 на валу ротора (исходя из расчета вала на прогиб) и колеблется в пределах 300…450 мм. Длина немагнитных пакетов соответствует ширине промежуточных подшипников ротора и колеблется в пределах 32…45 мм. Активные и немагнитные пакеты статора, чередуясь между собой, плотно посажены в корпусе статора 6 и закреплены с обеих сторон по торцам запорными кольцами. При сборке статора выполняется ряд специальных операций, включающих ориентацию листов статора, запрессовку наборов листов в строго ориентированном состоянии в корпус статора. Число активных пакетов зависит от мощности двигателя, который может быть изготовлен с тремя пакетами, пятнадцатью и больше.
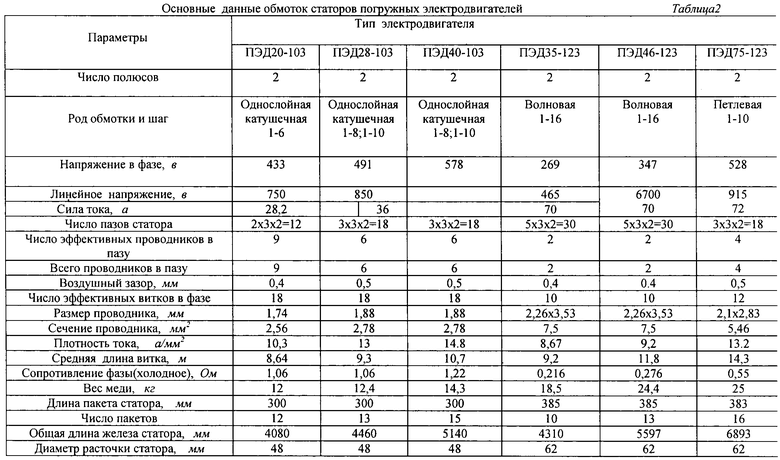
В пазах статора уложена впротяжку трехфазная обмотка из специального обмоточного провода круглого сечения с пленочной полиимидо-фторопластовой изоляцией, например провода ППИ-У, ПЭУ-200, ПФО, выпускаемого в России и СНГ. Фазы обмотки соединены в звезду. Основные данные обмоток статора погружных электродвигателей серии ПЭД приведены в таблице 2.
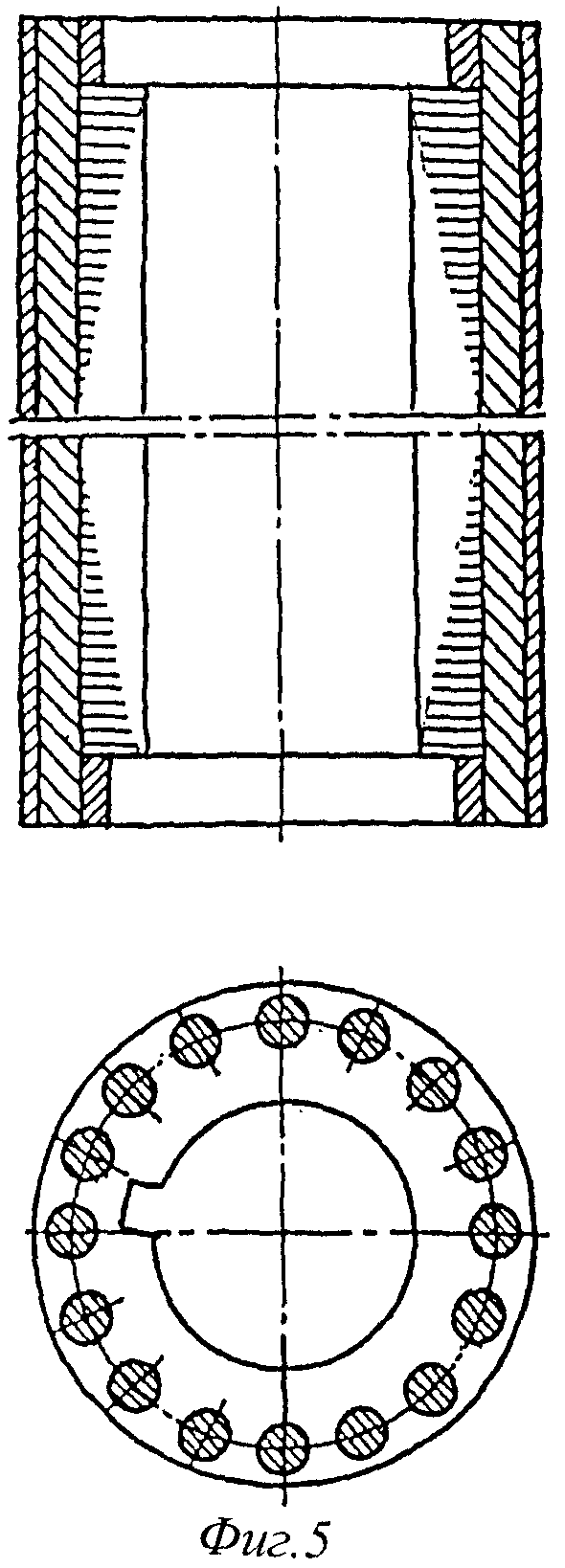
Внутри статора размещается ротор 10 (фиг.4) с сердечником. Последний представляет собой набор отдельных пакетов, имеющих каждый самостоятельную короткозамкнутую обмотку. Пакеты ротора шихтуются из отштампованных листов с пазами из электротехнической стали марок Э12, 2212 или 2215. Длина каждого пакета зависит от расстояния между
промежуточными радиальными опорами ротора, которое в свою очередь определяется расчетом на прогиб вала. Количество пакетов зависит от мощности электродвигателя. На фиг.5 показан пакет ротора электродвигателя ПЭД17-119. Обмотка каждого пакета состоит из медных стержней, установленных в его пазах, и медных короткозамыкающих колец, соединяющих стержни по их торцам. Пакеты ротора насаживаются на вал на шпонку и разделяются между собой промежуточными радиальными подшипниками скольжения. Вал ротора пустотелый для обеспечения циркуляции масла, выполнен из высокопрочной стали.
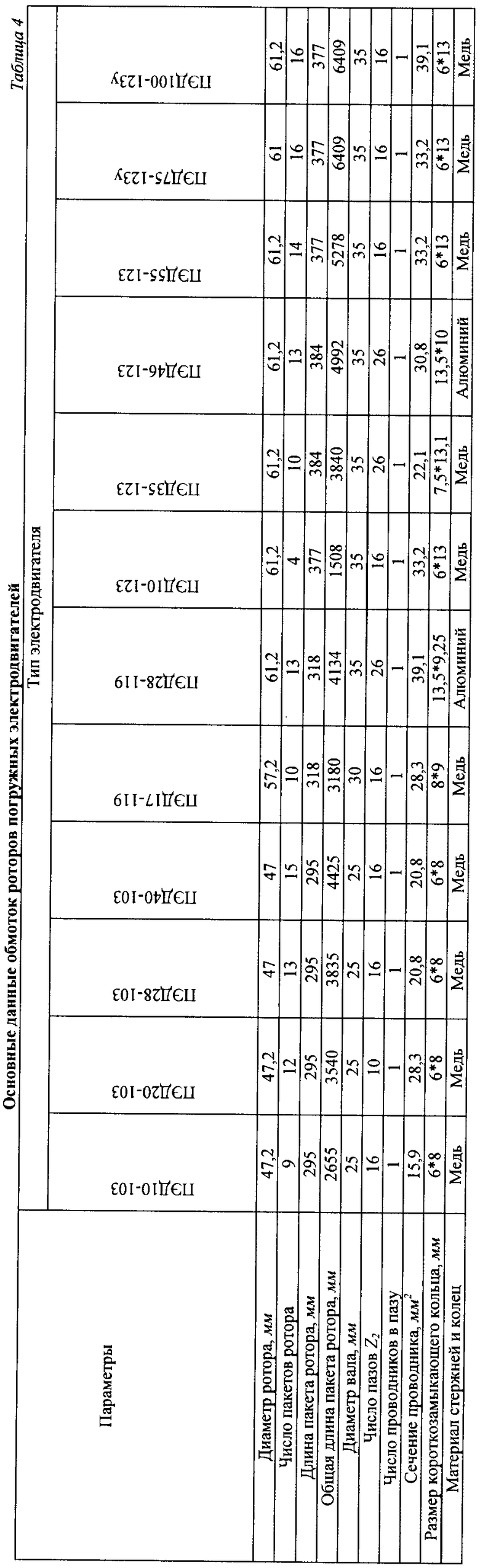
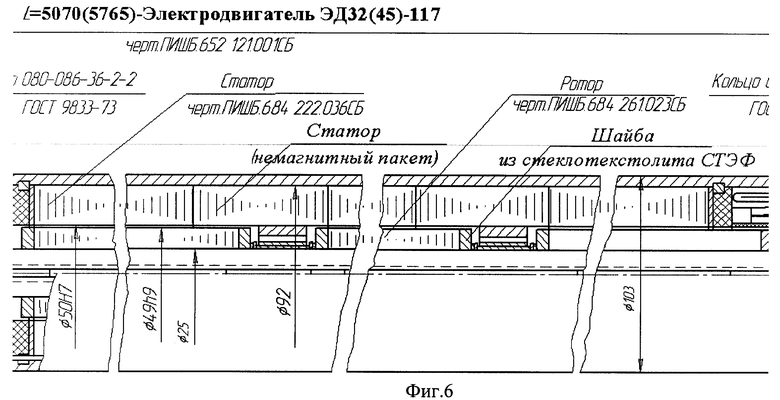
Ротор электродвигателя типа ПЭД в сборе представлен на фиг.6, где приняты следующие обозначения: 1 - шлицевой конец вала; 2 - пята; 3 - отверстие в валу для циркуляции масла; 4 - турбинка для нагнетания масла; 5 - пакет ротора; 6 - промежуточный радиальный подшипник скольжения; 7 - гайка для крепления роторных пакетов на валу; 8 - отверстие для подачи масла в радиальный подшипник; 9 - шпонка ротора. Основные данные обмоток ротора погружных электродвигателей приведены в таблице 4.
На фиг.6 приведен фрагмент сборочного чертежа электродвигателя типа ЭД32-117, на котором видны элементы конструкции ротора, находящиеся в расточке промежуточного немагнитного пакета статора ПЭД. Имеется радиальная пара трения: подшипник и втулка подшипника с радиальным отверстием, которое должно совпадать с радиальным отверстием 8 (фиг.6) на валу ротора. Регулировка совпадения достигается за счет плоских стальных регулировочных шайб толщиной 0,5 мм, надеваемых на вал по обе стороны втулки подшипника. Вместе с регулировочными шайбами ставятся две шайбы из стеклотекстолита СТЭФ1 толщиной 2 мм, выполняющие роль пары трения с торцом регулировочных шайб. На эти стеклотекстолитовые шайбы, согласно заявляемому способу определения скорости вращения, устанавливают при ремонтном или профилактическом обслуживании ПЭД по окружности шайб с шагом 180° два четырехполюсных высококоэрцитивных и термостойких постоянных магнита с радиально намагниченными разнополярными зонами, встречным расположением полюсов между смежными магнитами, имеющих каждый достаточную намагничивающую силу (более 6×104 кA/м), чтобы воздействовать через воздушный зазор на проводники обмоток статора ПЭД, при этом магниты ориентированы на всех шайбах при сборке ротора строго в определенном направлении, чтобы получить синхронное и синфазное воздействие от поля всех пар вращающихся магнитов на проводники отдельных секций обмотки статора ПЭД.
Приложение 2
Моделирование структурной схемы реализации способа определения скорости вращения погружных асинхронных электродвигателей
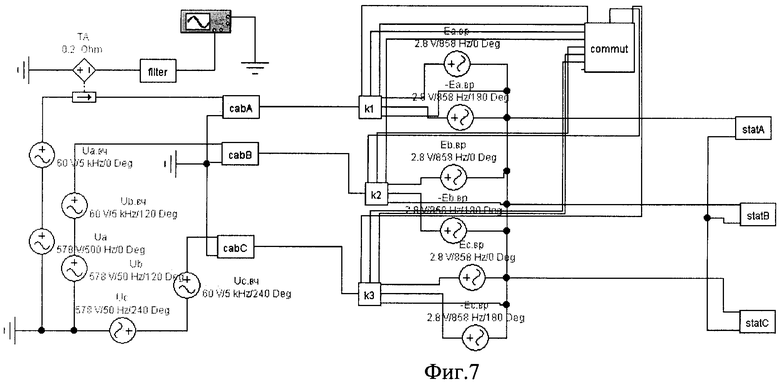
Схемотехническое моделирование (фиг.7) схемы (фиг.1) проведено средствами программы Electronics Workbench 5.12 для погружного электродвигателя ПЭДН32-117-1000, входящего в комплект установки УЭЦНМ5-50-1700 вместе с центробежным насосом 2ЭЦН5-50-1800, кабелем типа КПБК3х16 и промысловым трансформатором ТМПН-100/1170-73ХЛ1, у которого с учетом потери напряжения в кабельной линии рекомендована для данной установки отпайка на стороне ВН с линейным напряжением 1170 В (из материалов по единой комплектации УЭЦН с дополнениями 2007 г.).
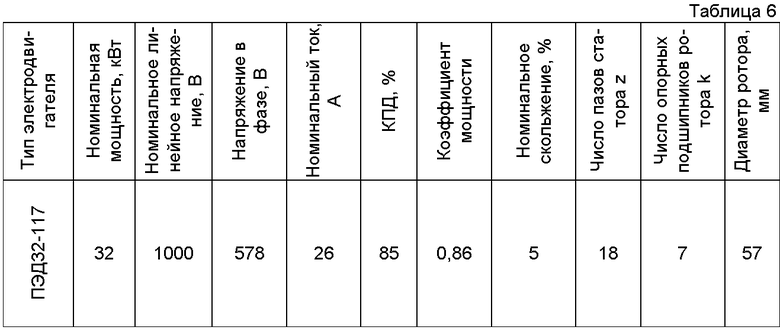
В качестве измерительного трансформатора тока 4, наиболее подходящего для ПЭД32-117-1000, выбран трансформатор марки ТНШ-0,66 -УЗ (Т3) с номинальным первичным током 30 А и нагрузочным сопротивлением 5, равным 1 Ом. Основные данные на ПЭДН32-117-1000 (ТУ-3381-026-21945400-97) приведены и таблице 6.
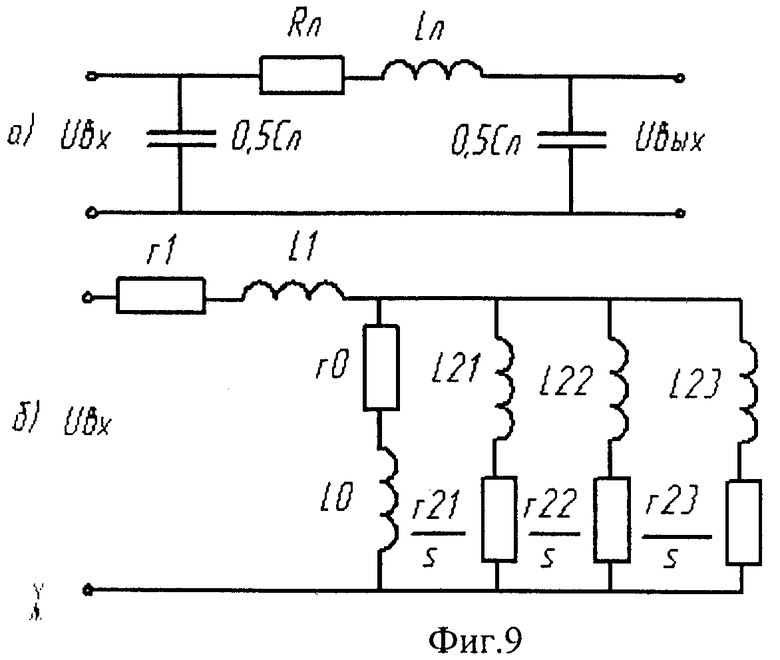
Фазы ПЭД обозначены на фиг.7 блоками stat и представлены в виде многоконтурной схемы замещения (фиг.9б), параметры которой даются в таблице 5 (Ковалев А.Ю. Моделирование погружных асинхронных электрических двигателей в составе установки электроцентробежных насосов: дисс.анд. техн. наук. Омск, 2010). Блоки cab моделируют на схеме фиг.7 фазы скважинного кабеля в виде классической П-образной схемы замещения (фиг.9а), параметры которой определены для кабеля типа КПБК сечением 16 мм2 и длиной 2000 м по известным формулам (Э.М.Ристхейн. Электроснабжение промышленных установок: Учеб. для вузов. - М.: Энергоатомиздат, 1991. - 424 с.).


где l - длина кабеля, м; F - поперечное сечение, м2; λ - удельная проводимость при 20°С, принимаемая для меди с учетом отбавки на скрутку и нагартовку равной 51,2 МСм/м; α - температурный коэффициент сопротивления, равный для меди 0,004 град-1; tk - температура жилы кабеля, соответствующая температуре пластовой жидкости в скважине и принятая равной 90°С; Dср - среднегеометрическое расстояние между фазными проводниками кабеля; rэкв - приведенный (с учетом формы сечения и поверхностного эффекта) радиус фазного проводника. Отношение  для кабеля КПБП сечением 16 мм2, вычисленное на основании данных (Погружные центробежные насосы для добычи нефти, Богданов А.А. Изд-во Недра, 1968 г. - 272с.), составляет 2,6; ω=314 рад/с - угловая скорость вращения ротора ПЭД. Результаты расчета параметров Rл, Lл, Cл представлены в таблице 5 (см. фиг.10).
для кабеля КПБП сечением 16 мм2, вычисленное на основании данных (Погружные центробежные насосы для добычи нефти, Богданов А.А. Изд-во Недра, 1968 г. - 272с.), составляет 2,6; ω=314 рад/с - угловая скорость вращения ротора ПЭД. Результаты расчета параметров Rл, Lл, Cл представлены в таблице 5 (см. фиг.10).
Измерительный трансформатор тока 4 моделируется преобразователем ток-напряжение ТА с передаточным сопротивлением 0,2 Ом. Трехфазное питающее напряжение, подводимое от повышающего трансформатора к жилам кабеля, моделируется фазными напряжениями Ua, Ub, Uc частоты 50 Гц (фиг.7), определенными через известное линейное напряжение Uл=1170 В путем деления его на  . Источники Ua.вч, Ub.вч, Uc.вч моделируют наличие в питающем напряжении высших гармонических составляющих за счет действия в станции управления УЭЦН преобразователя частоты с синусоидальной ШИМ на несущей частоте 5 кГц.
. Источники Ua.вч, Ub.вч, Uc.вч моделируют наличие в питающем напряжении высших гармонических составляющих за счет действия в станции управления УЭЦН преобразователя частоты с синусоидальной ШИМ на несущей частоте 5 кГц.
Эдс, индуцированные в проводниках обмоток статора полем вращающихся постоянных магнитов, представлены на схемной модели фиг.7 источниками Еa.вр, Еb.вр, Еc.вр, которые определены по формуле (1)

для типовых значений В=1,6 Т; l=2 мм; n=4 и скорости движения магнитов

где R - радиус ротора ПЭД. Источники Еa.вр, Еb.вр, Еc.вр формируют синусоидальное напряжение (принятое с учетом возможностей программы Electronics Workbench) с частотой fвр, равной

где f2 - частота вращения ротора ПЭДН32-117-1000

s - скольжение ротора (см. табл.5); f - номинальная частота трехфазных источников Ua, Ub, Uc.
Ключи, kl, k2, k3, управляемые блоком commut, коммутируют источники Еa.вр, Еb.вр, Еc.вр, - Еa.вр, - Еb.вр, - Еc.вр через интервалы времени T2/6 (где Т2 - период вращения ротора ПЭД) в последовательности, которая повторяет последовательность прохождения движущимися магнитами мимо проводников, относящихся к началам (a, b, c) и концам (x, y, z,) фазных обмоток, находящихся в z/3 пазах магнитопровода статора.
Полосовой фильтр (filter) выполнен в виде последовательного соединения четырех каскадов, реализованных каждый по схеме на фиг.10, которая содержит RC - фильтр высоких частот (C1, R1, C2, R2), RC - фильтр низких частот (C3, R3, C4, R4), стыковочные операционные усилители DA1, DA2. Подбором сопротивлений R6, R8 регулируется добротность каскадов, которую целесообразно задавать минимальной для входного и максимальной для выходного каскадов. Выбором конденсаторов С1…С4 устанавливаются небольшие расстройки между каскадами по частотам среза их амплитудно-частотных характеристик. Как видно из осциллограммы напряжения U1 (фиг.8), пропорционального току Iф.вр (ур-ние 2), полосовой фильтр 5 обеспечивает эффективное подавление токов от питающего напряжения частоты 50 Гц и от его высшей гармонической составляющей частоты 5 кГц. Выходное напряжение фильтра уверенно воспроизводит измерительный сигнал - частотную последовательность импульсов тока Iф.вр (фиг.3) - в виде напряжения U1 и позволяет получить с помощью компаратора напряжений 6 и делителя частоты 7 последовательность прямоугольных импульсов U3 на выходе схемы фиг.1, следующих с частотой вращения короткозамкнутого ротора ПЭД.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления работой электрического частотно-регулируемого привода погружного насоса | 2024 |
|
RU2838322C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДОБЫЧЕЙ УГЛЕВОДОРОДНОГО СЫРЬЯ | 2011 |
|
RU2487994C2 |
| СПОСОБ СБОРКИ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2005 |
|
RU2320063C2 |
| СПОСОБ КОНТРОЛЯ МАГНИТНОГО СОСТОЯНИЯ СТАТОРА ПОГРУЖНОГО АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ (ПЭД) | 2005 |
|
RU2319160C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2018 |
|
RU2716489C2 |
| Станция управления насосной установкой нефтедобывающей скважины (варианты) | 2017 |
|
RU2651651C2 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ПОГРУЖНОГО ЭЛЕКТРИЧЕСКОГО ЦЕНТРОБЕЖНОГО НАСОСА | 2001 |
|
RU2206794C1 |
| ТРЕХФАЗНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1993 |
|
RU2088027C1 |
| Установка плунжерная с линейным двигателем | 2024 |
|
RU2837176C1 |
| МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2015 |
|
RU2585279C1 |
Изобретение относится к технике измерения параметров электрических машин. Сущность изобретения заключается в том, что размещают на валу ПЭД на диэлектрических шайбах, находящихся по двум торцевым сторонам k немагнитных промежуточных подшипников ротора и имеющих диаметр, совпадающий с диаметром его пакетов 4k четырехполюсных магнитов с радиально намагниченными разнополярными зонами. Устанавливают на каждой шайбе по окружности диаметрально противоположно два магнита, обращенных друг к другу одноименными полюсами. Ориентируют все пары магнитов строго в одном направлении. Получают в трехфазной обмотке статора при вращении ротора частотные последовательности импульсов эдс, а в фазах силового кабеля, питающего ПЭД, частотные последовательности импульсов тока. Трансформируют наземным измерительным трансформатором тока частотную последовательность импульсов фазного тока и синусоидальный ток, потребляемый ПЭД от трехфазного питающего напряжения. Выделяют частотную последовательность импульсов напряжения, пропорциональную частотной последовательности импульсов фазного тока, фильтрацией выходного напряжения трансформатора тока посредством полосового фильтра, имеющего граничные полосы пропускания z·fmin и z·fmax. Формируют из выделенной частотной последовательности импульсов с помощью компаратора напряжений и делителя частоты новую последовательность прямоугольных импульсов, частота повторения которых понижена в z раз и совпадает с частотой вращения ПЭД, где z - число пазов у магнитопровода статора, fmin и fmax - минимально и максимально допустимые частоты вращения ПЭД в УЭЦН. Технический результат - упрощение измерения и передачи измерений на поверхность. 10 ил., 6 табл.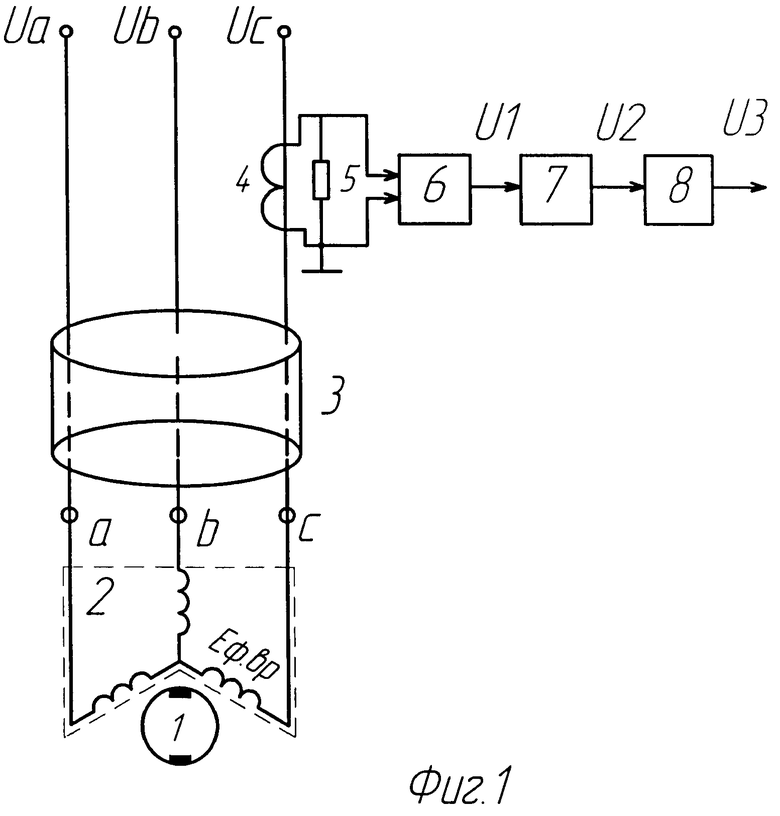
Способ определения скорости вращения, по которому устанавливают на валу электродвигателя постоянный магнит и получают частотную последовательность импульсов эдс, отличающийся тем, что, с целью упрощения реализации в погружных асинхронных электродвигателях (ПЭД) глубинно-насосных нефтедобывающих установок электроцентробежных насосов (УЭЦН), размещают на валу ПЭД на немагнитных диэлектрических шайбах, находящихся по торцевым сторонам k немагнитных промежуточных подшипников ротора и имеющих диаметр, совпадающий с диаметром его пакетов, 4k четырехполюсных магнита с радиальнонамагниченными разнополярными зонами, устанавливают на каждой шайбе по окружности диаметрально противоположно два магнита, обращенных одноименными полюсами друг к другу, ориентируют все пары магнитов на шайбах строго в одном направлении, получают в трехфазной обмотке статора при вращении ротора частотные последовательности импульсов эдс, а в фазах силового кабеля, питающего ПЭД, частотные последовательности импульсов тока, трансформируют наземным измерительным трансформатором тока частотную последовательность импульсов фазного тока и синусоидальный ток, потребляемый ПЭД от трехфазного питающего напряжения, выделяют частотную последовательность импульсов напряжения, пропорциональную частотной последовательности импульсов фазного тока, фильтрацией выходного напряжения трансформатора тока посредством полосового фильтра, имеющего граничные частоты пропускания z·fmin и z·fmax, формируют из выделенной частотной последовательности импульсов с помощью компаратора напряжений и делителя частоты новую последовательность прямоугольных импульсов напряжения, частота повторения которых понижена в z раз и совпадает с частотой вращения короткозамкнутого ротора ПЭД, где z - количество пазов у магнитопровода статора ПЭД, fmin и fmax - минимально и максимально допустимые частоты вращения ПЭД в УЭЦН.
| Способ измерения скорости вращения асинхронного двигателя | 1980 |
|
SU932402A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ АБСОЛЮТНОГО СКОЛЬЖЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ | 2004 |
|
RU2271013C1 |
| ДАТЧИК ПАРАМЕТРОВ ВРАЩЕНИЯ | 1997 |
|
RU2121692C1 |
| US 6084398 А, 04.07.2000 | |||
| Устройство для разделения материалов по трению | 1989 |
|
SU1711997A1 |
| US 2007194651 А1, 23.08.2007. | |||

