(5) СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ВРАЩЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления двигателем двойного питания, выполненным на базе асинхронного двигателя с фазным ротором, и устройство для его осуществления | 1987 |
|
SU1610589A2 |
| Устройство для управления асинхронным короткозамкнутым двигателем | 1980 |
|
SU900397A1 |
| Способ управления двигателем двойного питания, выполненным на базе асинхронного двигателя с фазным ротором и устройство для его осуществления | 1987 |
|
SU1515323A1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2013 |
|
RU2512873C1 |
| Устройство для измерения скорос-Ти ВРАщЕНия АСиНХРОННОгО дВигА-ТЕля | 1978 |
|
SU794527A1 |
| Цифровой измеритель скорости вращения асинхронного электродвигателя | 1976 |
|
SU632956A1 |
| Способ управления асинхронным электродвигателем и устройство для его осуществления | 1979 |
|
SU1037403A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭДС РОТОРА СИНХРОННЫХ И ТОКА РОТОРА АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ (ЕГО ВАРИАНТЫ) | 2001 |
|
RU2207578C2 |
| Устройство для измерения скольжения асинхронного электродвигателя | 1980 |
|
SU881618A1 |
1
Изобретение относится к измерению и контролю параметров движения и может быть использовано для измерения скорости вращения трехфазных асинхронных двигателей с большим моментом инерции.
В настоящее время в технике широко используется способ измерения скорости вращения ротора герметичного электродвигателя, заключающийся в том, что во внешнее электромагнитное поле, возникшее при работе двигателя, Помещают датчик и с по- , мощью набора электрических фильтров из наведенной в двигателе ЭДС, выделяют полезный сигнал, по частоте которого судят о скорости вращения или скольжения ротора tl 3.
Недостатками способа являются трудность формирования полезного сигнала, низкая помехозащищенность, необходимость дополнительных конструктивных изменений двигателя.
Известен также способ измерения угловой скорости электрических машин, который основан на измерении сигнала ЭДС, возникающего в дополнительной обмотке, за счет изменения магнитного потока в зазоре 2}.
Недостатком способа является невысокая точность измерения за счет влияния потоков рассеяния машин. Конструктивно реализация извест10ного способа довольно сложна.
Наиболее близким по технической сущности и решаемым задачам к предлагаемому является устройство, реализующее способ измерения скорости
ts вращения асинхронного двигателя путем кратковременного отклонения двигателя от источника питания и измерения длительности одного или нескольких периодов ЭДС вращения от30ключенного двигателя З.
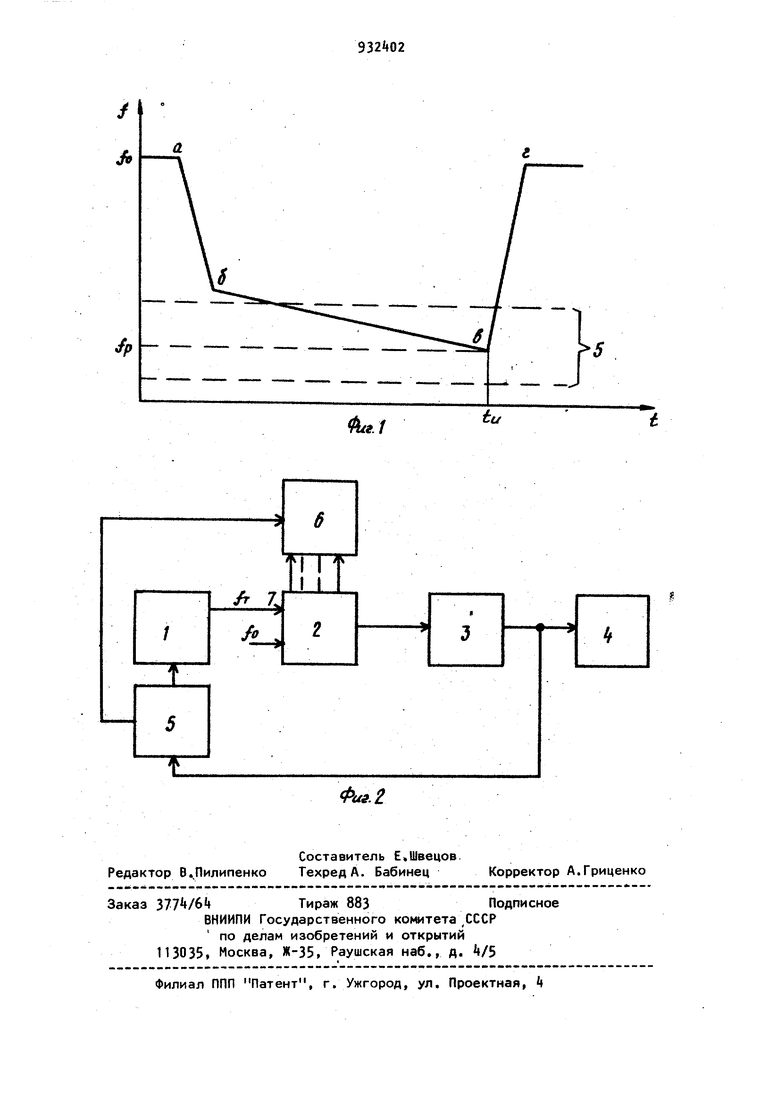
Недостатки известного способу заключаются в возникновении дополнительных динамических нагрузок при коммутации питающей сети, а также S снижении точности измерения скорости вследствие естественного торможения отключенного двигателя. Цель изобретения - повышение томности измерения за счет уменьшения динамических, еозйяйствий на двигательПоставленная цель достигается тем, что 8 способе измерения скороети вращения асинхронного двигателя путем определения частоты (периода) вращения ротора уменьшают частоту токов статора двигателя до момента совпадения частоты вращения поля статора с частотой вращения ротора, h указанный момент фиксируют часто-, ту (период) вращения ротора, по которой судят о скорости вращения двигателя. Для упрощения способа момент совпадения частот определяют по изме нению знака коэффициента мощности двигателя или по максимальному значению тока питания двигателя, На фиг6 1 представлен график из менения частоты TOKOS статора двигателя 8 функции времени5 на фиг. 2 вариант устройства измерения скорости, реализующий способ, Способ измерения скорости асинхронного двигателя основан на кратко временном переводе его а режим синхронного вращений ротора с полем ста™ тора. Для этого уменьшают частоту токов статораJ вбздействуя на источник питаний, до момента, когда сколь жение двигателя станет равным нулю. Этот момент определяют по минимуму тока потребления двигатели либо по изменению знака коэффициента мощности. Напряжение питания двигателя при этом поддерживают на noctoRHHOM уров не, В точке экстремума тока или коэффициента мощности фиксируют длительность периода тока статора и по ней определяют частоту вращения ротора. На фиг, 1 дан график закона изменения частоты токов статора 8 функци времени в режиме измерения скоростиj на фиг. 2 - электрическая схема устройства для осуществления предложенного способа. V При измерении частоту токов ста тора уменьшают в течение 1-2 периодов с точки а до точки с5(фиг.1), 9 4 соответствующей началу предполагаемой зоны изменения частоты вращения, что позволяет с высокой томностью совместить частоту вращения поля статора с частотой вращения ротора. Моменту совпадения указанных частот соответствует точка , которую определяют по сигналу, соответствующему экстремуму тока или коэффициенту мощности. По окончании измерения частоту токов статора устанавливают на прежнее значение (точка 1)« Значение погрешности измерения периода равно . , , погрешность от измене ия двигательного момента при измерении; среднеквадратичная погрешность частоты опорного генератора; частота, определякщая темп изменения.периода тока статора , текущее знамение периодов токов статора; - частота опорного генератора. Погрешность измерения периода вращения ротора определяется дискретностью задания приращения периода токов статора Т-, При данном способе измерения эта погрешность не зависит от величины периода вращения ротора Устройство, реализующее предлагаемый способ, содержит программное устройство 1, управляемый делитель 2 частоты, источник 3 питания, асинхронный двигатель Ц, датчик 5 тока, регистрирующее устройство 6, Устройство работает а1едующим образом. 8 рабочем режиме на входе 7 управляемого делителя частоты 2 записано значение двоичного кода N, соответствующее номинальной выходной частоте. При этом частота опорного генератора f.., номинальная частота токов статора ни код N связаны соотношением Цикл измерения скорости задается программным устройством 1 в виде
последовательности импульсов частотой f, поступающих на вход 7. На нем формируется нарастающий код NO Ny( который определяет выходную частоту управляемого делителя
2 частоты, равную - Получен О
ная таким образом частота поступает на вход источника питания, где преобразуется в трехфазную последовательность импульсов, которая определяет частоту токов на зажимах асинхронного двигатепя. В момент фиксирования минимума тока статора датчиком 5 на вход программного устройства 1 поступает сигнал, прекращающий подачу импульсов частотой f на вход управляемого делителя 2 частоты. Одновременно регистрирующее устройство 6 производит запись кода, соответствуищего длительности периода круговой частоты вращенияротора с информационных выходов управляемого делителя 2 частоты.
Предлагаемый способ измерения скорости вращения асинхронного двигателя позволяет иск1Ж)чить переходные электромагнитные процессы в системе источник питания - двигатель, а . также получить высокую ( Ю) точность измерения без применения специальных датчиков, путем использования свойств самого двигателя.
Формула изобретения
1,Способ измерения скорости вращения асинхронного двигателя путем
определения частоты (периода) вращения ротора, отличающийся тем, что, с целью повышения Т(3чности измерения путем уменьшения динамических воздействий на двигатель,
уменьшают частоту токов статора двигателя до момента совпадения частоты вращения поля статора с частотой врацения ротора, в указанный момент фиксируют частоту (период) вращения
ротора, по которой судят о скорости вращения двигателя.
изменению знака коэфф14циента мЬщности двигателя или по минимальному значению тока питания двигатепя.
Источники информации
принятые во внимание при эксперт.изе 1, Авторское свидетельство СССР , кл. G 01 Р 13/07, t966.
If kQ723, кл. G 01 Р 5/3, 1972 (прототип) .
