Область техники, к которой относится изобретение
Настоящее изобретение относится к ручным машинам с возвратно-поступательным движением рабочего органа, и, более конкретно, к таким ручным машинам, которые содержат устройство снижения уровня вибрации.
Уровень техники
Известны ручные машины с возвратно-поступательным движением (электрические ручные машины), снабженные механизмом уменьшения вибраций, так называемым динамическим виброгасителем. Электрическая ручная машина содержит корпус, рабочий орган, двигатель, узел преобразования движения и ударный механизм. Рабочий орган способен совершать возвратно-поступательное движение относительно корпуса. В корпусе размещаются: двигатель, узел преобразования движения и ударный механизм. К задней части корпуса прикреплена рукоятка. Нижняя часть корпуса снабжена цилиндром. Цилиндр является камерой уменьшения вибраций.
В камере уменьшения вибраций имеется направляющий стержень. Направляющий стержень проходит параллельно направлению возвратно-поступательного движения рабочего органа. На направляющем стержне установлен первый груз. Первый груз проходит в первом сквозном отверстии во втором грузе. Второй груз проходит во втором сквозном отверстии в третьем грузе. В оба конца каждого груза упираются первые концы трех пружин. Вторые концы пружин опираются на часть корпуса, составляющую камеру уменьшения вибраций.
При такой конструкции грузы скользят друг на друге вдоль направляющего стержня относительно корпуса под действием вибрации, создаваемой возвратно-поступательным движением рабочего органа. Таким образом, уровень вибрации может быть снижен. Ручная машина с возвратно-поступательным движением рабочего органа, имеющая вышеописанную конструкцию, описана, например, в публикации заявки Японии №S52-109673.
Краткое изложение сущности изобретения
В известной ручной машине с возвратно-поступательным движением первый груз скользит по направляющей планке, и грузы скользят друг по другу. Сопротивление скольжению неизбежно будет таким большим, что все три груза не могут скользить в достаточной степени. Соответственно, вибрация, возникающая при возвратно-поступательном движении рабочего органа, не может быть погашена в достаточной степени.
Вышеописанная ручная машина с возвратно-поступательным движением содержит цилиндр и ось. В цилиндре удерживаются грузы и пружины, и сквозь них проходит ось. Грузы и пружины установлены соосно и могут двигаться прямолинейно. Соответственно, использование цилиндра и оси существенно удорожает ручную машину с возвратно-поступательным движением рабочего органа.
В известной конструкции ручной машины с возвратно-поступательным движением все три груза и пружины являются отдельными частями. Таким образом, разборка, ремонт и сборка механизма уменьшения вибраций затруднены.
Соответственно, в основу настоящего изобретения была положена задача создания ручной машины с возвратно-поступательным движением рабочего органа, содержащей недорогой механизм уменьшения вибраций, который способен в достаточной степени гасить вибрацию и имеет длительный срок службы.
Другой задачей настоящего изобретения является создание ручной машины с возвратно-поступательным движением рабочего органа, содержащей механизм уменьшения вибраций, который можно легко снять, отремонтировать и установить обратно на место.
Для решения указанных и других задач в настоящем изобретении предлагается ручная машина с возвратно-поступательным движением рабочего органа, содержащая корпус, источник энергии привода, узел преобразования движения и механизм уменьшения вибраций. Источник энергии привода расположен в корпусе. Узел преобразования движения установлен с опорой на корпус и выполнен для преобразования движущей силы, создаваемой источником энергии привода, в возвратно-поступательное движение, сообщаемое рабочему органу, подвижно установленному с опорой на корпус. Механизм уменьшения вибраций содержит ось, груз, опорный элемент и смещающее устройство. Ось имеет центральную линию (т.е. геометрическую ось), установлена с опорой на корпус и проходит в направлении, перпендикулярном направлениям возвратно-поступательного движения рабочего органа. Груз расположен на расстоянии от оси с возможностью поворота в направлении качания. Опорный элемент поддерживает груз с возможностью качания последнего вокруг центральной линии оси. Смещающее устройство стремится сдвинуть груз в заданное положение в направлении его качания относительно корпуса.
При такой конструкции сопротивление скольжению при колебаниях груза возникает только между опорным элементом и осью. Таким образом, сопротивление скольжению, которое создается при движении груза относительно корпуса, может быть уменьшено. Соответственно, груз может эффективно колебаться при вибрации ручной машины с возвратно-поступательным движением рабочего органа, которая возникает при возвратно-поступательном движении рабочего органа, в результате чего вибрация ручной машины может быть уменьшена в достаточной степени. Более того, срок службы ручной машины может быть увеличен благодаря малой величине сопротивления скольжению.
Ход (амплитуда колебаний) опорного элемента может быть уменьшен, и, соответственно, могут быть уменьшены размеры пространства, в котором осуществляется движение этого элемента. Кроме того, смещающее устройство может быть выполнено таким образом, чтобы оно не выступало с обоих концов груза в направлении его качания.
Предпочтительно использовать два механизма уменьшения вибраций. Два таких механизма расположены симметрично относительно оси рабочего органа.
При такой конструкции два механизма уменьшения вибраций могут снизить уровень вибрации ручной машины с возвратно-поступательным движением рабочего органа, возникающей при возвратно-поступательном движении рабочего органа, поскольку они установлены симметрично относительно оси рабочего органа.
Предпочтительно использовать устройство ограничения амплитуды качания, обеспечивающее ограничение диапазона углов качания груза в направлении его качания.
При такой конструкции размах колебаний груза (размах колебаний в направлении качания) может быть легко и надежно ограничен, в результате чего предотвращается деформация и повреждение смещающего устройства.
В предпочтительном варианте выполнения ручная машина опорный элемент имеет первый конец, подвижный вокруг центральной линии оси, и второй конец, присоединенный к грузу. Опорный элемент и груз способны качаться как единое целое. Устройство ограничения амплитуды качания содержит первый контактный элемент, выполненный из упругого материала с возможностью предотвращения выхода груза и опорного элемента в процессе их качания за пределы первого заданного угла, после того как первый конец опорного элемента упрется в первый контактный элемент.
При такой конструкции первый упругий элемент действует в качестве элемента, ограничивающего размах качания, для предотвращения выхода груза и опорного элемента в процессе колебаний за пределы первого заданного угла.
В предпочтительном варианте выполнения ручная машина содержит два вторых контактных элемента, по одному на каждом конце груза в направлении его качания. Каждый из вторых контактных элементов упирается в корпус, когда груз в процессе качания поворачивается на второй заданный угол.
Поскольку вторые контактные элементы в такой конструкции упираются в корпус, когда отклонение груза в процессе колебаний достигает второго заданного угла, то может быть обеспечено простое и надежное ограничение хода груза (амплитуды качания). Если вторые контактные элементы изготовлены из упругого материала, то сила удара вторых контактных элементов может поглощаться, когда они с силой ударяются в корпус, в результате чего предотвращается повреждение и деформация корпуса, а также вибрация, которая может быть вызвана ударами вторых контактных элементов.
В предпочтительном варианте выполнения ручной машины смещающее устройство содержит две пластинчатые пружины, каждая из которых имеет первый конец и второй конец. Первый конец пластинчатой пружины может контактировать с грузом. Второй конец пластинчатой пружины прикреплен к корпусу.
При такой конструкции механизм гашения вибраций занимает меньше места по сравнению с вариантом, в котором механизм содержит пружины. Поэтому ручная машина с возвратно-поступательным движением может быть достаточно компактной.
В предпочтительном варианте выполнения ручной машины центральная линия оси находится на расстоянии от центра тяжести ручной машины.
В этом случае груз может совершать интенсивные колебания в результате вибрации ручной машины с возвратно-поступательным движением рабочего органа, которая возникает при возвратно-поступательном движении рабочего органа, в результате чего может быть эффективно снижен уровень вибрации ручной машины.
В предпочтительном варианте выполнения ручной машины она содержит ударный механизм, расположенный между рабочим органом и механизмом уменьшения вибраций, и рукоятку на корпусе. При этом механизм уменьшения вибраций расположен между ударным механизмом и рукояткой.
При такой конструкции может быть эффективно снижен уровень вибрации, возникающей в результате возвратно-поступательного движения рабочего органа ручной машины.
В предпочтительном варианте выполнения ручной машины источник энергии привода содержит двигатель с выходным валом. Узел преобразования движения содержит вал кривошипного механизма, маховик кривошипного механизма, палец кривошипного механизма и шатун. Вал кривошипного механизма проходит параллельно выходному валу. Маховик кривошипного механизма вращается вместе с валом кривошипного механизма. Палец кривошипного механизма вращается вокруг оси вала кривошипного механизма вместе с маховиком кривошипного механизма. Шатун имеет два конца, один из которых соединен с пальцем кривошипного механизма, а другой конец может совершать возвратно-поступательное движение в направлениях возвратно-поступательного движения. Вал кривошипного механизма расположен между выходным валом и ударным механизмом.
Поскольку при такой конструкции вал кривошипного механизма расположен между выходным валом и ударным механизмом, между рукояткой и узлом преобразования движения образуется мертвое пространство. В этом мертвом пространстве может быть размещен механизм уменьшения вибраций. Таким образом, обеспечивается эффективное использование пространства в корпусе ручной машины.
В предпочтительном варианте выполнения ручной машины опорный элемент опирается на ось с возможностью качания.
Поскольку при такой конструкции опорный элемент опирается на ось с возможностью качания, то механизм уменьшения вибраций можно легко установить путем формирования отверстия в опорном элементе для проходящей через него оси. Кроме того, механизм уменьшения вибраций может иметь простую конструкцию, поскольку опорный элемент может поворачиваться вокруг оси без использования подшипников.
В предпочтительном варианте выполнения ручной машины груз расположен на воображаемой линии, проходящей через геометрическое место точек возвратно-поступательного движения рабочего органа, или возле этой линии.
При такой конструкции вибрация ручной машины, вызванная возвратно-поступательным движением рабочего органа, может эффективно гаситься, поскольку груз поворачивается на воображаемой линии, проходящей через геометрическое место точек возвратно-поступательного движения рабочего органа, или возле этой линии.
Смещающее устройство в предпочтительном варианте содержит две пластинчатые пружины, имеющие защемленную часть, контактную часть и деформируемую часть. Защемленная часть прикреплена к корпусу, который ограничивает ее движение, и один ее конец соединен с деформируемой частью. Контактная часть может контактировать с грузом. Деформируемая часть расположена между защемленной частью и контактной частью. Деформируемая часть имеет узкий участок, ширина которого в направлении центральной линии оси меньше ширины вышеуказанного одного конца защемленной части.
Такая конструкция может обеспечивать достаточную жесткость каждой пластинчатой пружины без увеличения ее длины и позволяет получить небольшое значение константы пружины.
В предпочтительном варианте выполнения ручной машины ширина узкого участка постепенно уменьшается в направлении контактной части.
В этом случае может быть предотвращена концентрация напряжений на узком участке при деформации пластинчатой пружины.
В предпочтительном варианте выполнения ручной машины деформируемая часть имеет также широкий участок, ширина которого в направлении центральной линии оси больше ширины вышеуказанного одного конца защемленной части. Узкий участок расположен между широким участком и контактной частью.
При такой конструкции напряжение распределяется равномерно по всему краю пластинчатой пружины. В этом случае предотвращается разрыв пружины по ее краю. Поэтому срок службы пластинчатой пружины может быть увеличен.
В предпочтительном варианте выполнения ручной машины ширина контактной части в направлении центральной линии оси больше ширины узкого участка.
В этом случае поверхностное давление между контактной частью и грузом, когда контактная часть скользит по грузу, может быть уменьшено. В результате замедляется износ не только контактной части, но и груза.
В предпочтительном варианте выполнения ручной машины корпус имеет отсек для размещения механизма уменьшения вибраций и съемную крышку, закрывающую отсек. Механизм уменьшения вибраций является извлекаемым из отсека посредством снятия крышки.
Поскольку при такой конструкции крышка является единственным компонентом, который окружает механизм уменьшения вибраций, то этот механизм можно легко отсоединить от ручной машины. При этом механизм уменьшения вибраций можно легко снять, отремонтировать и снова поставить на место.
В предпочтительном варианте выполнения ручной машины механизм уменьшения вибраций выполнен в виде отдельного модуля.
При такой конструкции модуль механизма уменьшения вибраций может быть легко снят с ручной машины и затем снова установлен на место. Соответственно, механизм уменьшения вибраций можно легко разобрать, отремонтировать и собрать.
В предпочтительном варианте выполнения ручной машины корпус содержит крышку кривошипного механизма, закрывающую узел преобразования движения и выполненную как единое целое с крышкой отсека механизма уменьшения вибраций.
Поскольку при такой конструкции крышка кривошипного механизма может закрывать узел преобразования движения и механизм уменьшения вибраций, это позволяет сократить количество частей ручной машины.
В предпочтительном варианте выполнения ручной машины ее корпус содержит картер кривошипного механизма, служащий опорой для узла преобразования движения и выполненный из жесткого материала. При этом картер кривошипного механизма включает в себя отсек механизма уменьшения вибраций.
При такой конструкции груз и опорный элемент могут качаться устойчиво, поскольку механизм уменьшения вибраций установлен в отсеке картера кривошипного механизма, который выполнен из жесткого материала.
Во втором варианте предлагаемая в изобретении ручная машина с возвратно-поступательным движением рабочего органа содержит корпус, источник энергии привода, узел преобразования движения и механизм уменьшения вибраций. Источник энергии привода расположен в корпусе. Узел преобразования движения установлен с опорой на корпус и выполнен для преобразования движущей силы, создаваемой источником энергии привода, в возвратно-поступательное движение, сообщаемое рабочему органу, подвижно установленному с опорой на корпус. Механизм уменьшения вибраций приводится в действие вибрацией корпуса, возникающей в результате возвратно-поступательного движения узла преобразования движения. Корпус имеет отсек для размещения механизма уменьшения вибраций и съемную крышку, закрывающую отсек. Механизм уменьшения вибраций является извлекаемым из отсека посредством снятия крышки.
В предпочтительном варианте выполнения ручной машины механизм уменьшения вибраций выполнен в виде отдельного модуля.
В предпочтительном варианте выполнения ручной машины ее корпус содержит крышку кривошипного механизма, закрывающую узел преобразования движения и выполненную за одно целое с крышкой отсека механизма уменьшения вибраций.
В предпочтительном варианте выполнения ручной машины ее корпус содержит картер кривошипного механизма, служащий опорой для узла преобразования движения и выполненный из жесткого материала. Картер кривошипного механизма включает в себя отсек механизма уменьшения вибраций.
Краткое описание чертежей
В приведенном ниже описании изобретение рассматривается подробнее на примерах его осуществления со ссылками на прилагаемые чертежи, на которых показано:
на фиг.1 - вид в разрезе ручной машины с возвратно-поступательным движением рабочего органа (ручная машина ударного действия) в соответствии с первым вариантом осуществления настоящего изобретения,
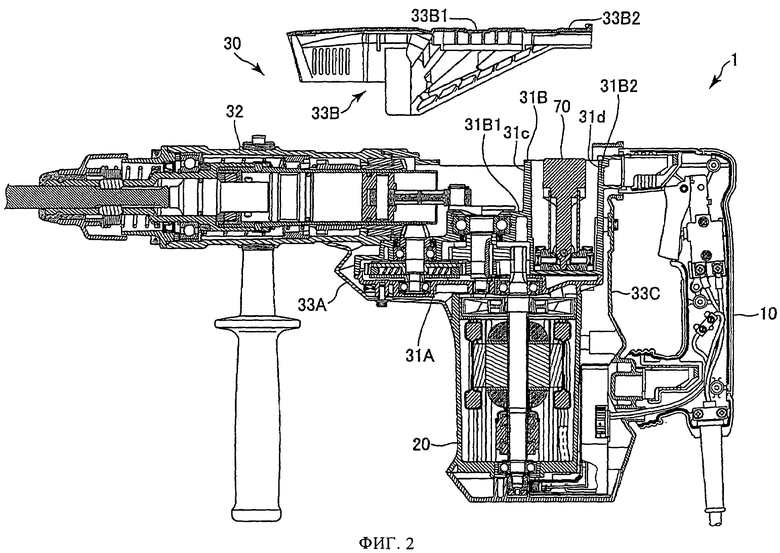
на фиг.2 - вид в разрезе ручной машины с возвратно-поступательным движением в соответствии с первым вариантом осуществления настоящего изобретения со снятой крышкой кривошипного механизма,
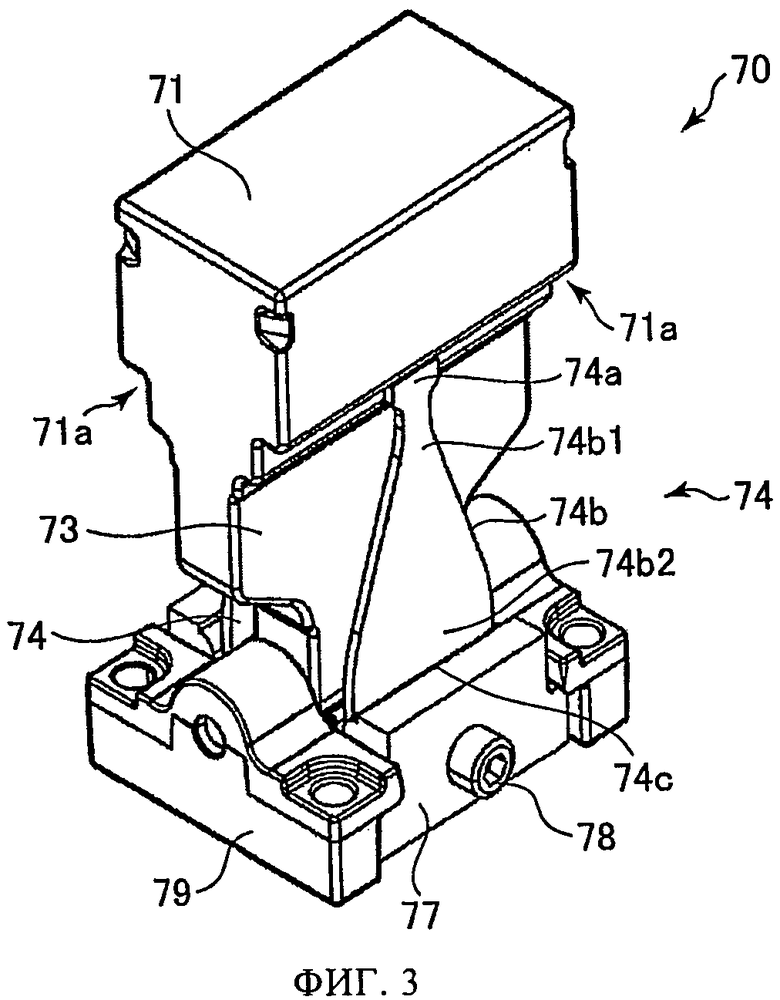
на фиг.3 - вид в перспективе механизма уменьшения вибраций ручной машины с возвратно-поступательным движением рабочего органа в соответствии с первым вариантом осуществления настоящего изобретения,
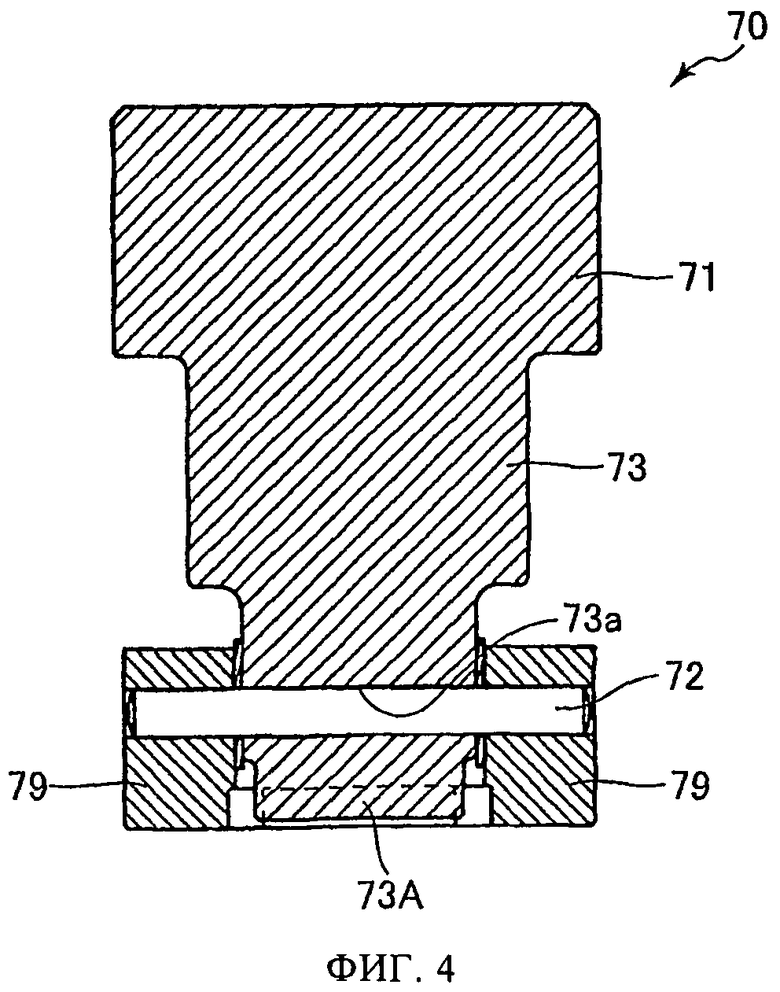
на фиг.4 - вид механизма уменьшения вибраций в разрезе по линии IV-IV фиг.1,
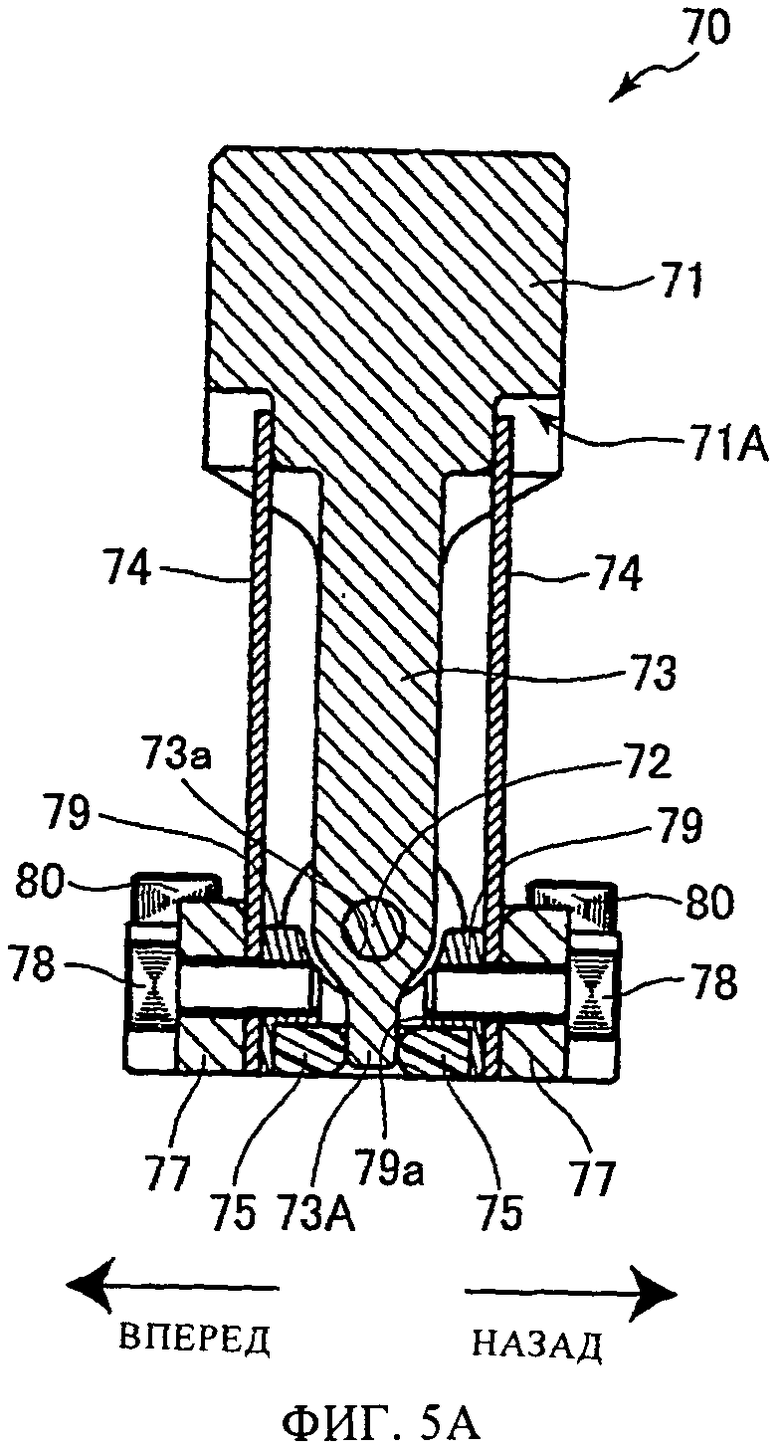
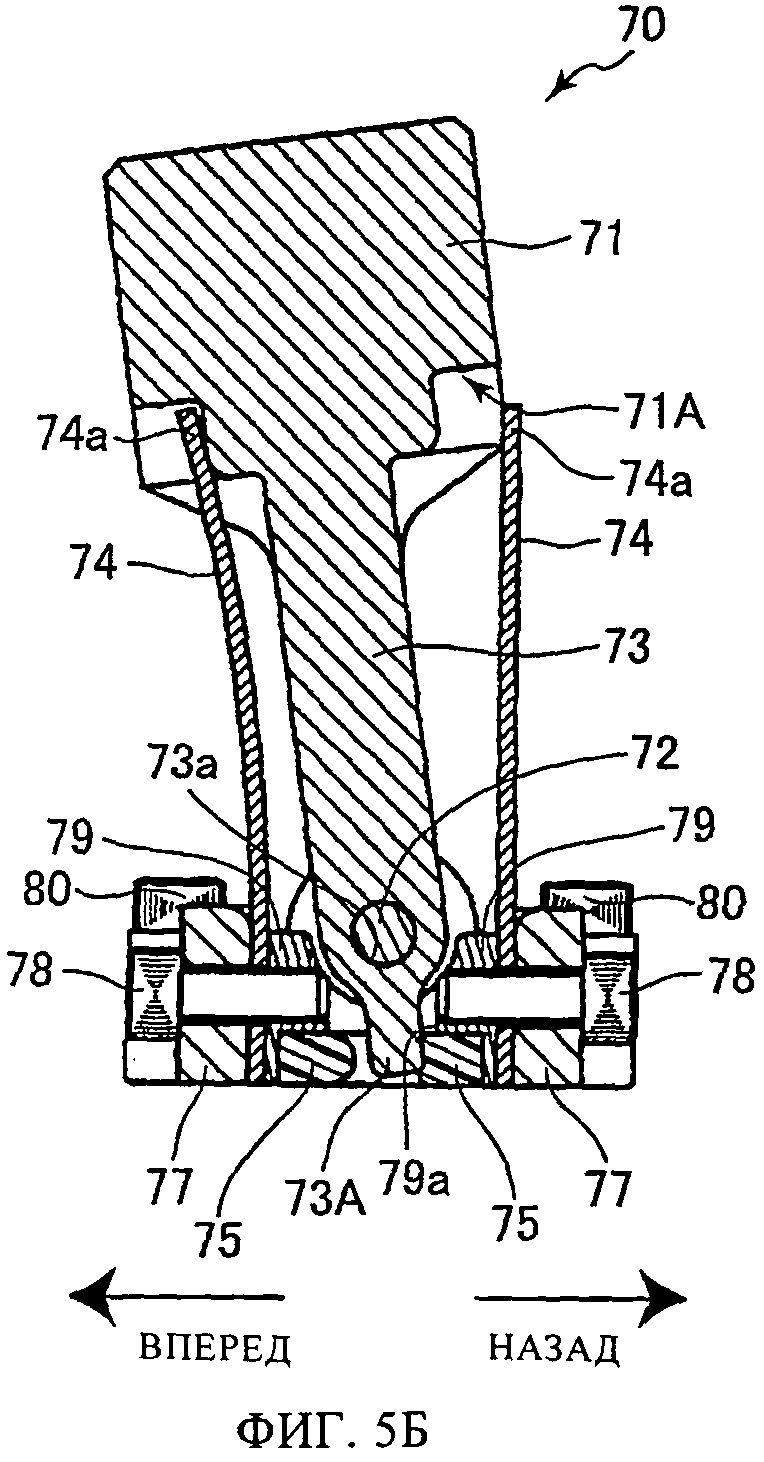
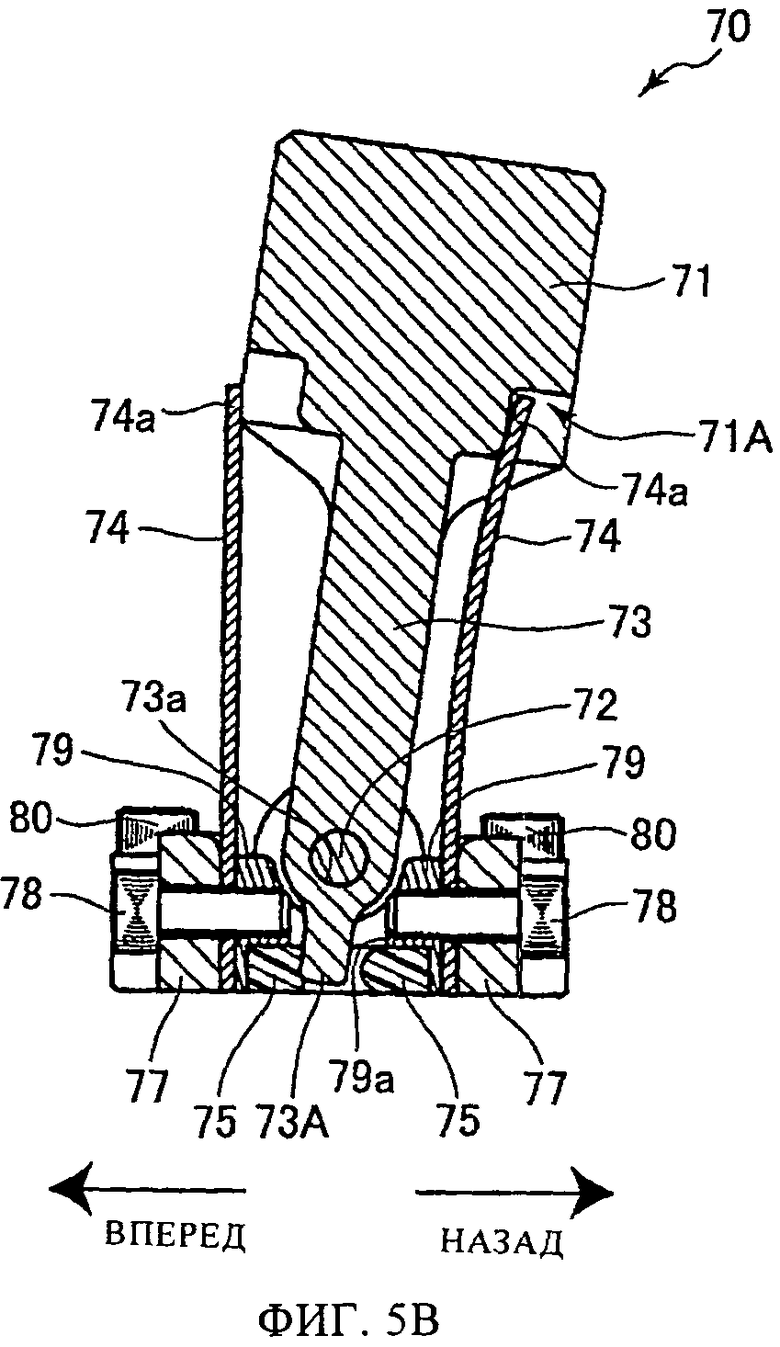
на фиг.5А-5В - виды в разрезе механизма уменьшения вибраций, иллюстрирующие его действие, в соответствии с первым вариантом осуществления настоящего изобретения, причем на фиг.5А показан вид в разрезе, иллюстрирующий заданное положение груза, на фиг.5Б - вид в разрезе, иллюстрирующий положение груза, отклонившегося в одном направлении вибрации, и на фиг.5В - вид в разрезе, иллюстрирующий положение груза, отклонившегося в другом направлении вибрации,
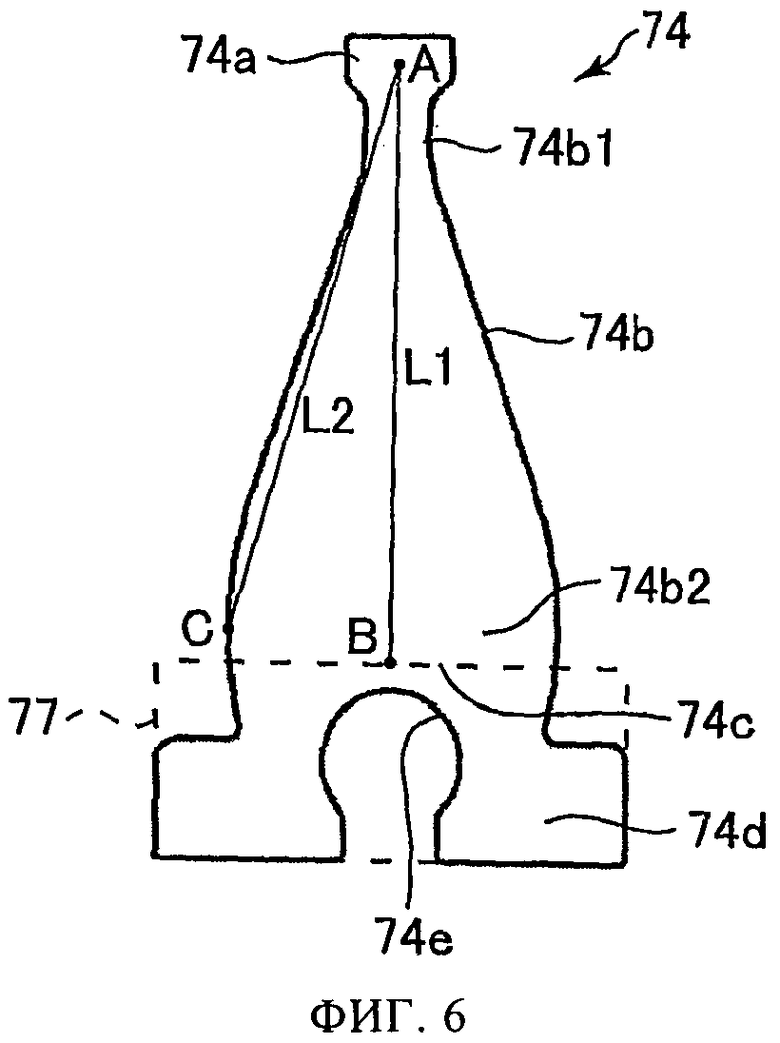
на фиг.6 - вид в перспективе пластинчатой пружины механизма уменьшения вибраций ручной машины с возвратно-поступательным движением рабочего органа в соответствии с первым вариантом осуществления настоящего изобретения,
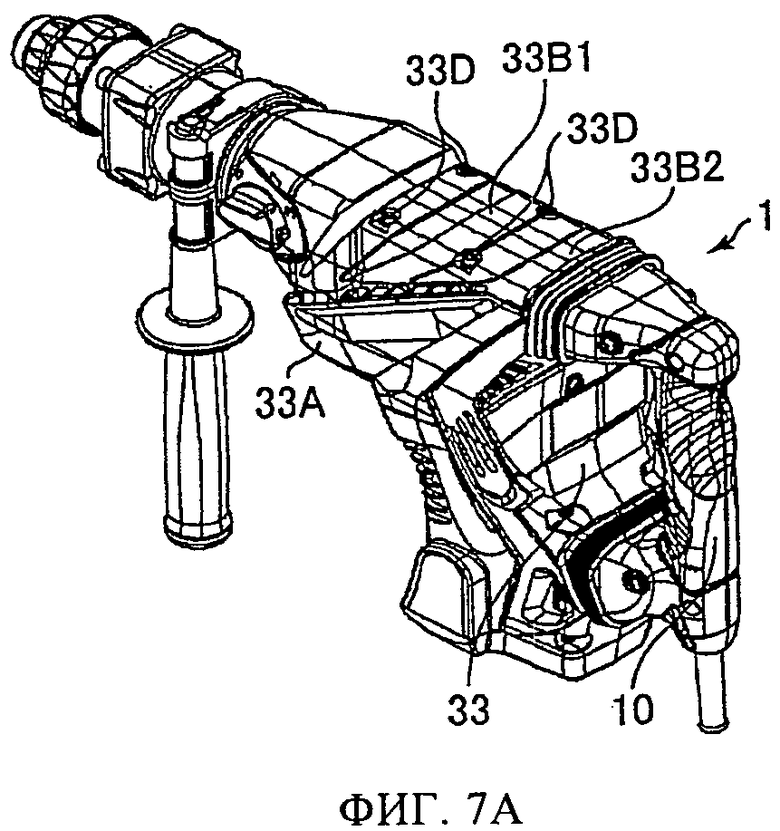
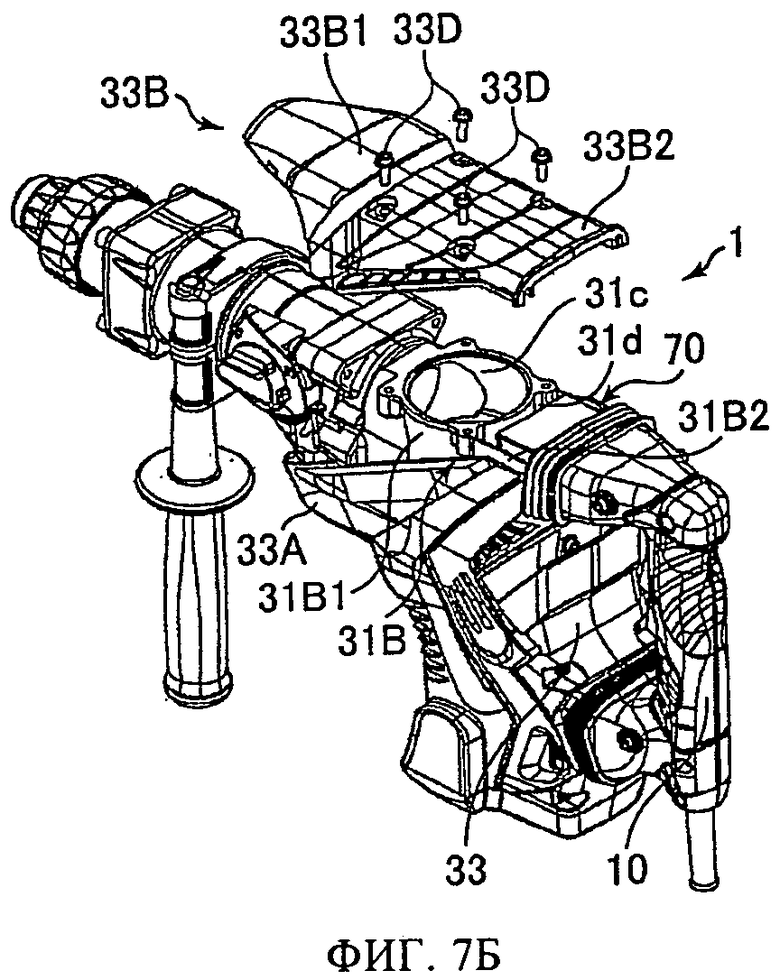
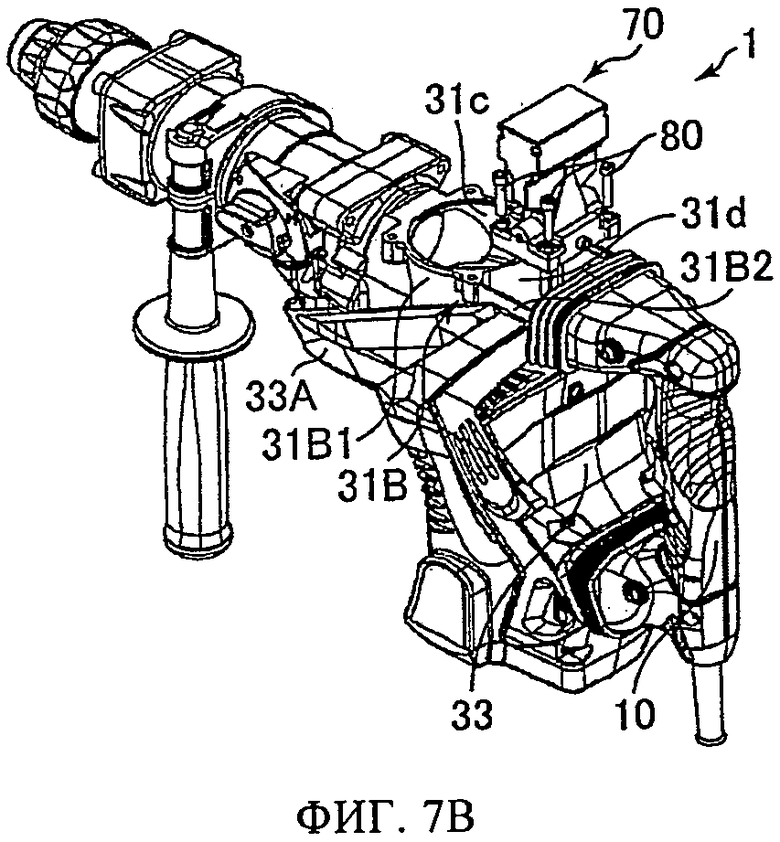
фиг.7А-7В - виды в перспективе сзади, иллюстрирующие способ извлечения механизма уменьшения вибраций из ручной машины с возвратно-поступательным движением рабочего органа в соответствии с первым вариантом осуществления настоящего изобретения, причем на фиг.7А показан вид ручной машины полностью в сборе, на фиг.7Б - вид ручной машины со снятой крышкой кривошипного механизма, на фиг.7В - вид ручной машины со снятым механизмом уменьшения вибраций,
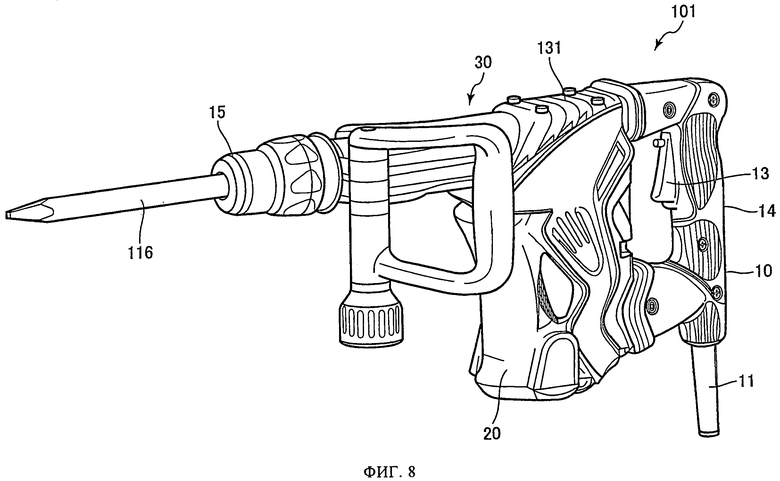
на фиг.8 - вид в перспективе ручной машины с возвратно-поступательным движением рабочего органа в соответствии со вторым вариантом осуществления настоящего изобретения,
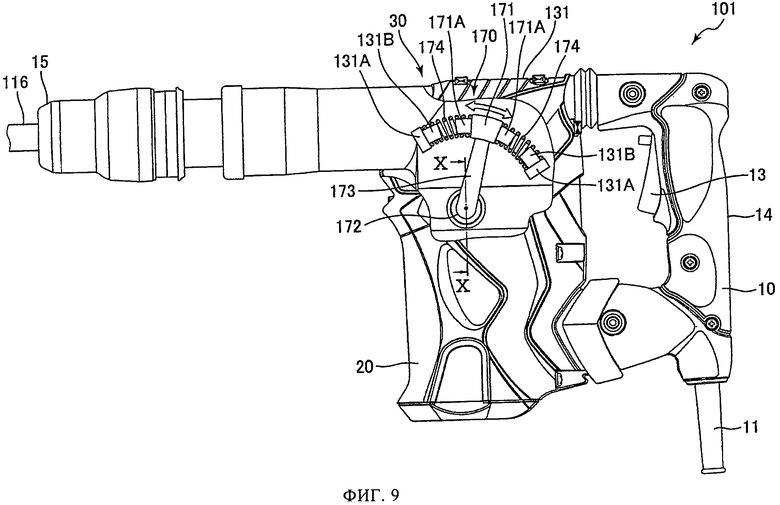
на фиг.9 - вид с частичным разрезом ручной машины с возвратно-поступательным движением рабочего органа в соответствии со вторым вариантом осуществления настоящего изобретения,
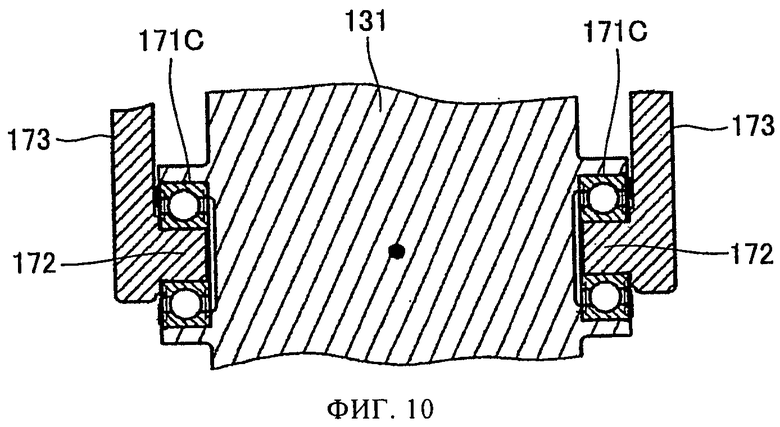
на фиг.10 - вид механизма уменьшения вибраций ручной машины с возвратно-поступательным движением рабочего органа в разрезе по линии Х-Х фиг.9,
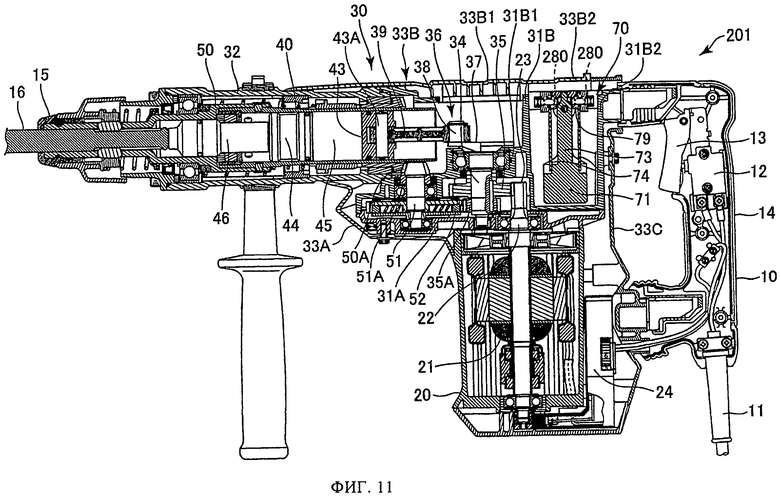
на фиг.11 - вид в разрезе ручной машины с возвратно-поступательным движением рабочего органа в соответствии с третьим вариантом осуществления настоящего изобретения,
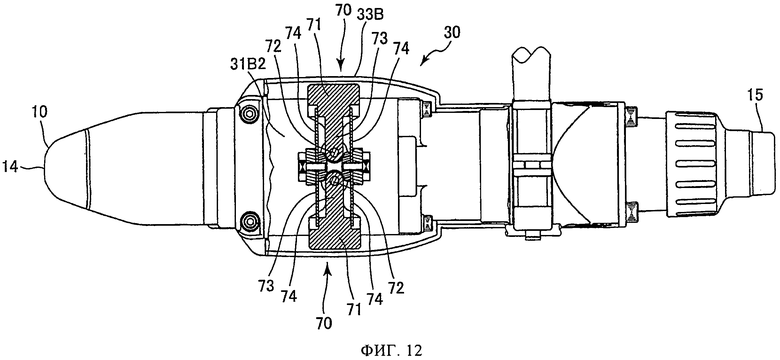
на фиг.12 - вид с частичным разрезом ручной машины с возвратно-поступательным движением рабочего органа в соответствии с модификацией первого варианта осуществления изобретения,
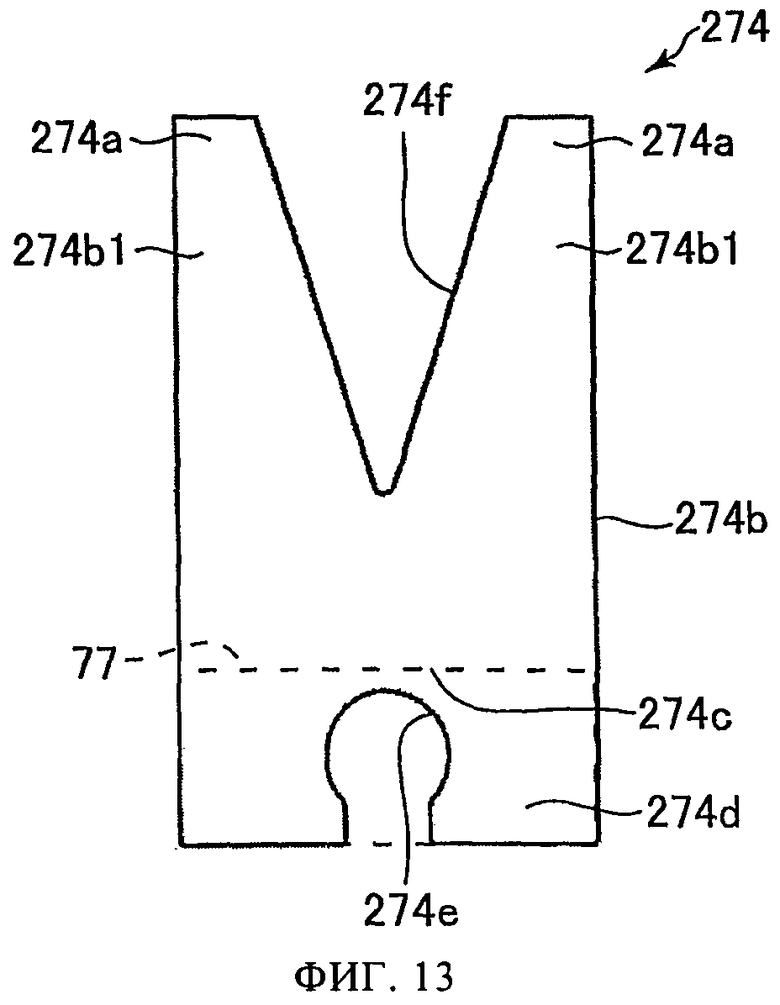
на фиг.13 - вид пластинчатой пружины ручной машины с возвратно-поступательным движением рабочего органа в соответствии с модификацией первого варианта осуществления изобретения.
Осуществление изобретения
Ручная машина с возвратно-поступательным движением рабочего органа в соответствии с первым вариантом осуществления настоящего изобретения описывается ниже со ссылками на фиг.1-7. Ручная машина по первому варианту осуществления изобретения является ручной машиной 1 ударного (в т.ч. ударно-вращательного) действия. На фиг.1 левая сторона указывается в описании как передняя часть ручной машины 1, а правая сторона указывается как задняя часть ручной машины 1. Ручная машина 1 содержит корпус с рукояткой 10, кожух 20 двигателя и корпус 30 передаточного механизма, соединенные друг с другом.
К рукоятке 10 прикреплен кабель 11 питания. В рукоятке 10 расположен механизм 12 включения. Кнопка 13 включения, на которую может нажимать пользователь, соединена механически с механизмом 12 включения. Механизм 12 соединяется с внешним источником питания (не показан) по кабелю 11. С помощью кнопки 13 включения электродвигатель 21 (будет описан ниже) может быть соединен с внешним источником питания и отсоединен от него. Кроме того, рукоятка 10 содержит ручку 14, за которую пользователь держит ручную машину 1 во время работы.
Кожух 20 двигателя расположен спереди и снизу от рукоятки 10. В кожухе 20 расположен электродвигатель 21. Электродвигатель 21 содержит выходной вал 22, с помощью которого передается движущая сила, развиваемая электродвигателем. На конце выходного вала 22 установлена ведущая шестерня 23, размещенная в картере 30 передаточного механизма. На кожухе 20 позади электродвигателя 21 расположен блок 24 управления, обеспечивающий регулирование скорости вращения двигателя 21.
Как показано на фиг.1 и 2, корпус 30 передаточного механизма содержит крышку 31А передаточного механизма, картер 31В кривошипного механизма, корпус 32 цилиндра, кожух 33А, крышку 33В кривошипного механизма и заднюю крышку 33С. Крышка 31А передаточного механизма расположена над кожухом 20 двигателя. Картер 31В кривошипного механизма расположен над крышкой 31А передаточного механизма. Задний конец картера 31В кривошипного механизма соединен с рукояткой 10. Картер 31В кривошипного механизма изготовлен из алюминия (материал высокой твердости), и в нем имеется опорная часть 31В1 кривошипного механизма и отсек 31В2. Опорная часть 31В1 кривошипного механизма обеспечивает опору для описанного ниже узла преобразования движения. В отсеке 31В2 размещается описанный ниже механизм 70 уменьшения вибраций. Как показано на фиг.2, опорная часть 31В1 кривошипного механизма и отсек 31В2 имеют первое отверстие 31с и второе отверстие 31d соответственно. Через первое отверстие 31с такие компоненты, как механизм 36 преобразования движения и поршень 43, описание которых приведено ниже, могут быть заменены новыми частями, и через это отверстие указанные компоненты могут быть смазаны. Корпус 32 цилиндра расположен на переднем конце картера 31В кривошипного механизма.
Кожух 33А закрывает крышку 31А передаточного механизма и нижнюю часть картера 31В кривошипного механизма и представляет собой внешнюю оболочку. Крышка 33В кривошипного механизма установлена с возможностью съема на картере 31В кривошипного механизма с помощью винтов 33D (см. фиг.7А и 7В) сверху картера 31В кривошипного механизма. Крышка 33В кривошипного механизма является внешней оболочкой, которая закрывает узел преобразования движения (описан ниже). Крышка 33В кривошипного механизма изготовлена из пластмассы и содержит основную часть 33В1 крышки и удлиненную часть 33В2. Удлиненная часть 33В2 отходит от заднего конца основной части 33В1 крышки в направлении рукоятки 10. Основная часть 33В1 крышки закрывает первое отверстие 31с (узел преобразования движения). Удлиненная часть 33В2 закрывает второе отверстие 31d (механизм 70 уменьшения вибраций). Задняя крышка 33С прикреплена к задней части кожуха 20 двигателя и картера 31В кривошипного механизма. Нижний конец задней крышки 33С соединен с рукояткой 10.
Вал 34 кривошипного механизма, проходящий параллельно выходному валу 22, опирается с возможностью вращения на переднюю сторону ведущей шестерни 23 в крышке 31А передаточного механизма и опорной части 31В1 картера 31В кривошипного механизма. Первая шестерня 35, которая входит в зацепление с ведущей шестерней 23, прикреплена соосно к нижней части вала 34 кривошипного механизма. Кроме того, к нижней части вала 34 кривошипного механизма соосно прикреплена шестерня 35А. Механизм 36 преобразования движения расположен на верхней части вала 34 кривошипного механизма. Механизм 36 преобразования движения содержит маховик 37 кривошипного механизма, палец 38 кривошипного механизма и шатун 39. Маховик 37 прикреплен к верхнему концу вала 34 кривошипного механизма. Палец 38 прикреплен к краю маховика 37 и введен в задний конец шатуна 39. Вал 34 кривошипного механизма и механизм 36 преобразования движения составляют вышеупомянутый узел преобразования движения. Узел преобразования движения опирается на опорную часть 31В1 кривошипного механизма.
Вал 51 передачи вращения, проходящий параллельно валу 34 кривошипного механизма, опирается с возможность вращения на переднюю часть шестерни 35А в крышке 31А передаточного механизма и опорную часть 31В1 картера 31В кривошипного механизма. К нижнему концу вала 51 передачи вращения прикреплена соосно вторая шестерня 52, которая входит в зацепление с шестерней 35А. К верхнему концу вала 51 передачи вращения соосно прикреплена первая коническая шестерня 51А.
В передней части картера 31В кривошипного механизма и в корпусе 32 цилиндра расположен цилиндр 40, проходящий перпендикулярно выходному валу 22. Центральная ось цилиндра 40 и ось вращения выходного вала 22 расположены в одной плоскости. В цилиндре 40 расположен поршень 43, прилегающий к внутренним стенкам цилиндра с возможностью скольжения. Поршень 43 может совершать возвратно-поступательное движение по оси цилиндра 40. В поршне 43 имеется палец 43А поршня, который проходит сквозь передний конец шатуна 39. В передней части цилиндра 40 расположен ударник 44, который может двигаться со скольжением по внутренней стенке цилиндра 40 в направлении его оси. В цилиндре 40 между поршнем 43 и ударником 44 образована воздушная камера 45.
В корпусе 32 ударника 44 установлен с возможностью вращения цилиндр 50. Вращающийся цилиндр 50 охватывает по внешней окружности переднюю часть цилиндра 40. Вращающийся цилиндр 50 проходит вперед от цилиндра 40, и на конце цилиндра 50 расположен держатель 15 рабочего органа ручной машины, обеспечивающий возможность присоединения/отсоединения рабочего органа 16. На задней концевой части вращающегося цилиндра 50 расположена вторая коническая шестерня 50А, входящая в зацепление с первой конической шестерней 51А. Центральная ось вращающегося цилиндра 50 и ось вращения выходного вала 22 расположены в одной плоскости. Кроме того, спереди от ударника 44 расположен промежуточный элемент 46 (боек), установленный с возможностью скольжения во вращающемся цилиндре 50. Промежуточный элемент 46 может совершать возвратно-поступательное движение по оси вращающегося цилиндра 50.
Механизм 70 уменьшения вибраций (виброгаситель) расположен в отсеке 31В2 напротив рукоятки 10. Механизм 70 уменьшения вибраций описывается ниже со ссылками на фиг.3-7. На фиг.3 приведен вид в перспективе механизма 70 уменьшения вибраций. На фиг.4 приведен вид механизма 70 уменьшения вибраций в разрезе по линии IV-IV на фиг.1. Как показано на фиг.3-5, основными частями механизма 70 уменьшения вибраций являются груз 71, ось 72, опорный элемент 73, две пластинчатые пружины 74, зажимной элемент 77 и опора 79 пластинчатых пружин.
Как показано на фиг.4 и 5, ось 72 имеет цилиндрическую форму. Оба конца оси 72 закреплены в опоре 79 пластинчатых пружин. Ось 72 проходит перпендикулярно направлениям (назад и вперед) возвратно-поступательного движения поршня 43. Иначе говоря, ось 72 проходит перпендикулярно плоскости чертежа. Центральная линия оси 72 находится на расстоянии от центра тяжести ручной машины 1 ударного действия. Груз 71 находится на расстоянии от оси 72 в радиальном направлении. Груз 71 расположен на воображаемой линии, проходящей через геометрическое место точек возвратно-поступательного движения рабочего органа 16, или возле этой линии, в то время как груз 71 и опорный элемент 73 качаются, поворачиваясь вокруг оси 72, как это будет описано ниже. На нижней стороне груза 71 имеется ступенчатая часть 71А.
Как показано на фиг.4 и 5, в нижней концевой части опорного элемента 73 имеется сквозное отверстие 73а. Ось 72 проходит через это сквозное отверстие 73а. Верхняя концевая часть опорного элемента 73 соединена с грузом 71 и составляет с ним единое целое. Таким образом, опорный элемент 73 удерживается на оси 72 с возможностью поворота вокруг нее. Когда опорный элемент 73 поворачивается вокруг оси 72, груз 71 поворачивается вокруг этой оси вместе с опорным элементом 73.
Как показано на фиг.5А, опорный элемент 73 имеет выступающую часть 73А, которая проходит в отверстии 79а, сформированном в опорном элементе 79 пластинчатых пружин. Выступающая часть 73А находится снизу опорного элемента 73 и проходит в направлении, противоположном направлению, в котором опорный элемент 73 проходит от оси 72 к грузу 71. Напротив выступающей части 73А слева и справа от нее имеется два упругих элемента 75 (см. фиг.5А-5В).
Как показано на фиг.3 и 5А, пластинчатые пружины 74 установлены примерно параллельно друг другу. Как показано на фиг.6, каждая из пластинчатых пружин 74 имеет контактную часть 74а, деформируемую часть 74b, основание 74с и закрепляемую (защемляемую) часть 74d. Контактная часть 74а может взаимодействовать с боковой поверхностью, отходящей почти вертикально, ступенчатой части 71А груза 71. Деформируемая часть 74b имеет узкий участок 74b1 и широкий участок 74b2. Как можно видеть, широкий участок 74b2 расположен ближе к закрепляемой части 74d, чем узкий участок 74b1. Закрепляемый участок 74d имеет вырез 74е. Основание 74с и закрепляемая часть 74d зажимаются между зажимным элементом 77 и опорным элементом 79 пластинчатых пружин винтом 78, проходящим сквозь вырез 74е и зажимной элемент 77. В результате, движение основания 74с и закрепляемой части 74d ограничивается. Таким образом, основание 74с и закрепляемая часть 74d являются защемленными частями. Основание 74с прижимается верхним краем зажимного элемента 77.
Узкий участок 74b1 уже, чем основание 74с, в направлении оси 72, то есть в направлении слева направо на фиг.6. Широкий участок 74b2 шире, чем основание 74с, в направлении оси 72, то есть в направлении слева направо на фиг.6. Контактная часть 74а шире, чем край узкого участка 74b1, соединяющийся с контактной частью 74а, в направлении оси 72, то есть в направлении слева направо на фиг.6. Узкий участок 74b1 представляет собой постепенное сужение от широкого участка 74b2 в направлении контактной части 74а. Как показано на фиг.6, расстояние L1 между точкой А на контактной части 74а и точкой В на основании 74с примерно равно расстоянию L2 между точкой А и точкой С на широком участке 74b2. Широкий участок 74b2 возле точки С имеет наибольшую ширину в направлении оси 72.
Как уже указывалось, груз 71 и опорный элемент 73 в механизме 70 уменьшения вибраций прикреплены к опорному элементу 79 пластинчатых пружин с помощью оси 72, а пластинчатые пружины 74 и зажимной элемент 77 прикреплены к опорному элементу 79 пластинчатых пружин с помощью винта 78. Таким образом, механизм 70 уменьшения вибраций собирается в виде отдельного модуля. Модуль механизма 70 уменьшения вибраций прикрепляется к отсеку 31В2, когда опорный элемент 79 пластинчатых пружин прикрепляется к нижней части отсека 31В2 с помощью винта 80. Как показано на фиг.7А-7В, механизм 70 уменьшения вибраций может присоединяться к отсеку 31В2 и отсоединяться от него после извлечения винтов 33D, в результате чего можно снять крышку 33В кривошипного механизма.
Ниже описывается работа ручной машины 1 ударного действия в соответствии с первым вариантом осуществления изобретения. Рабочий орган 16 прижимается пользователем к обрабатываемому объекту или заготовке (не показан) с помощью рукоятки 10. Затем пользователь нажимает кнопку 13 включения для подачи напряжения питания на электродвигатель 21. Движущая сила вращения электродвигателя 21 передается на вал 34 кривошипного механизма с помощью ведущей шестерни 23 и первой шестерни 35. Вращение вала 34 кривошипного механизма преобразуется в возвратно-поступательное движение поршня 43 в цилиндре с помощью механизма 36 преобразования движения (маховик 37, палец 38 и шатун 39). Возвратно-поступательное движение поршня 43 приводит к циклическим увеличениям и уменьшениям давления воздуха в воздушной камере 45, в результате чего осуществляется возвратно-поступательное движение ударника 44. Ударник 44 двигается вперед и ударяет в задний конец промежуточного элемента 46, в результате чего ударное воздействие передается на рабочий орган 16.
Кроме того, движущая сила вращения электродвигателя 21 передается на вал 51 передачи вращения с помощью ведущей шестерни 23, первой шестерни 35, вала 34 кривошипного механизма, шестерни 35А и второй шестерни 52. Вращение вала 51 передаточного механизма передается вращающемуся цилиндру 50 с помощью первой конической шестерни 51А и второй конической шестерни 50А, в результате чего осуществляется вращение цилиндра 50. Вращение цилиндра 50 заставляет вращаться рабочий орган 16. Материал обрабатываемого объекта (не показан) дробится за счет силы вращения и силы удара, передаваемых в ручной машине 1 на рабочий орган 16.
При работе ручной машины 1 ударного действия в ней действует вибрация, частоту которой в грубом приближении можно считать постоянной и которая возникает в результате возвратно-поступательного движения ударника 44, а также рабочего органа 16. Вибрация передается на отсек 31В2 картера 31В кривошипного механизма. Вибрация передается в отсеке 31В2 на опорный элемент 79 пластинчатых пружин. В результате груз 71 и опорный элемент 73 качаются в направлении возвратно-поступательного движения поршня 43, то есть вперед-назад. Качание груза 71 и опорного элемента 73 обеспечивает эффективное гашение вибрации ручной машины 1 ударного действия, в результате чего работа ручной машины 1 улучшается.
Ниже описывается движение частей механизма 70 уменьшения вибраций в процессе работы ручной машины 1 ударного действия. Как показано на фиг.5Б, груз 71 и опорный элемент 73 поворачиваются вперед в результате сил, действующих в фазе удара ручной машины 1. При этом груз 71 поворачивается налево, преодолевая упругую силу смещения одной из пластинчатых пружин 74, которая действует на переднюю сторону груза 71, как показано на фиг.5Б, поскольку контактная часть 74а этой пластинчатой пружины упирается в груз 71. При этом выступающая часть 73А отклоняется назад, преодолевая упругое смещающее сопротивление упругого элемента 75, который находится сзади, как показано на фиг.5Б. Когда увеличивающаяся величина угла отклонения груза 71 и опорного элемента 73 достигает первого заданного значения, груз 71 и опорный элемент 73 начинают отклоняться назад (фиг.5Б) под действием сил упругости одной из пластинчатых пружин 74 и одного упругого элемента 75.
Когда груз 71 и опорный элемент 73 отклоняются назад, как показано на фиг.5В, то груз 71 отклоняется назад, преодолевая упругое сопротивление другой пластинчатой пружины 74, и контактная часть 74а этой другой пластинчатой пружины 74 упирается в груз 71. Одновременно выступающая часть 73А отклоняется вперед, преодолевая упругое смещающее сопротивление другого упругого элемента 75, который находится впереди, как показано на фиг.5В. Когда увеличивающаяся величина угла отклонения груза 71 и опорного элемента 73 достигает первого заданного значения, груз 71 и опорный элемент 73 начинают отклоняться вперед (фиг.5В) под действием сил упругости другой пластинчатой пружины 74 и другого упругого элемента 75.
Таким образом, два первых упругих элемента 75 действуют в качестве ограничителей, предотвращающих отклонения груза 71 и опорного элемента 73 за пределы первого заданного угла. Первый заданный угол - это угол, на который максимально отклоняются груз 71 и опорный элемент 73 влево или вправо из их заданного (исходного) положения, как показано на фиг.5А-5В. Пластинчатые пружины 74 заставляют груз 71 и опорный элемент 73 возвращаться в их заданные положения, показанные на фиг.5А. "Заданные положения" - это положения, которые занимает груз 71 под действием пластинчатых пружин 74, когда ручная машина 1 ударного действия не работает, и, соответственно, вибрация отсутствует.
Если ручная машина 1 упадет на пол, на нее будет действовать большая ударная нагрузка. Упругость пластинчатых пружин 74 со временем снижается. В любой из указанных ситуаций будет происходить чрезмерное отклонение груза 71. В этом случае груз 71 будет упираться в часть отсека 31В2, которая находится напротив груза 71 при его отклонениях. Упор груза 71 в часть отсека 31В2 может надежно ограничивать чрезмерное отклонение груза 71 (выход за допустимый диапазон углов качания), в результате чего будет предотвращаться деформация и повреждение пластинчатых пружин 74.
Как уже указывалось, в состав механизма 70 уменьшения вибраций в соответствии с первым вариантом осуществления изобретения входит груз 71, ось 72, опорный элемент 73 и пластинчатые пружины 74. Ось 72 закреплена в корпусе и проходит перпендикулярно направлению возвратно-поступательного движения рабочего органа 16. Груз 71 находится на расстоянии от оси 72. Груз 71 опирается на опорный элемент 73 с возможностью качания вокруг оси 72. Пластинчатые пружины 74 стремятся вернуть груз 71 в заданное положение относительно корпуса в направлениях качания груза 71. Поэтому сопротивление скольжению при отклонении груза 71 создается только между опорным элементом 73, который определяет центр вращения для отклонения груза 71, и осью 72. Таким образом, сопротивление скольжению, которое создается при движении груза 71 относительно корпуса, может быть уменьшено. Соответственно, груз 71 может эффективно отклоняться при вибрации ручной машины 1 ударного действия, которая возникает при возвратно-поступательном движении рабочего органа 16, в результате чего вибрация ручной машины 1 может быть уменьшена в достаточной степени. Вибрация может быть уменьшена практически до нуля. Более того, срок службы ручной машины 1 ударного действия может быть увеличен благодаря малой величине трения скольжения. Кроме того, ход опорного элемента 73 может быть уменьшен, и, соответственно, может быть уменьшены размеры пространства, в котором происходит движение опорного элемента 73.
По обоим краям груза 71 в направлениях его колебаний имеются ступенчатые части 71А, и контактные части 74а пластинчатых пружин 74 взаимодействуют с соответствующими ступенчатыми частями 71А. Таким образом, размер механизма 70 уменьшения вибраций в направлениях качания может быть уменьшен. Поэтому механизм 70 может быть компактным, в результате чего может быть обеспечена компактность и всей ручной машины 1 ударного действия. Кроме того, пластинчатые пружины 74 не выступают за края груза 71 в направлениях качания в отличие от пружинного устройства 171А во втором варианте осуществления изобретения, описанном ниже. Поэтому механизм 70 уменьшения вибраций может иметь меньшие размеры по сравнению с ручной машиной 101 ударного действия в соответствии со вторым вариантом осуществления изобретения.
Размер нижней части механизма 70 уменьшения вибраций, содержащей упругие элементы 75, зажимной элемент 77 и опорный элемент 79 пластинчатых пружин, установленный на оси 72, меньше расстояния, которое проходит груз 71 при движении в направлениях качания (направления вправо-влево на фиг.5). Поэтому механизм 70 уменьшения вибраций может быть компактным в направлениях качания груза 71.
Два упругих элемента 75 создают силу, действующую на выступающую часть 73А при отклонениях груза 71 и опорной части 73. Поэтому, когда груз 71 отклоняется в одном направлении, упругие элементы 75 могут создавать силу, действующую на груз 71 в другом, противоположном направлении. Кроме того, упругие элементы 75 могут действовать в качестве ограничителей отклонения, предотвращающих выход одного конца опорного элемента 73 и выступающей части 73А за пределы отклонения, после которого груз 71 должен начинать отклонение в другом направлении.
Смещающее устройство, создающее возвращающую силу, включает две пластинчатые пружины 74, которые опираются первыми концами на оба края груза 71 в направлениях качания, и их вторые концы опираются на опорный элемент 79 пластинчатых пружин. Механизм 70 уменьшения вибраций, включая смещающее устройство, не занимает так много места, как в случае, когда механизм 70 содержит две пластинчатые пружины. Поэтому ручная машина 1 ударного действия может быть достаточно компактной.
Поскольку центральная линия оси 72 находится на расстоянии от центра тяжести ручной машины 1, то интенсивность вибрации груза 71, вызываемой вибрацией ручной машины 1, связанной с возвратно-поступательным движением рабочего органа 16, может быть достаточно большой, и вибрация ручной машины 1 будет эффективно гаситься. Поскольку механизм 70 уменьшения вибраций расположен между ударным механизмом и рукояткой 10, то вибрация ручной машины 1, связанная с возвратно-поступательным движением рабочего органа 16, может быть эффективно уменьшена.
Поскольку вал 34 кривошипного механизма расположен в передней части выходного вала 22, между рукояткой 10 и узлом преобразования движения формируется "мертвая" зона. В этой мертвой зоне расположен механизм 70 уменьшения вибраций. Таким образом, пространство в корпусе ручной машины может быть использовано эффективно. Механизм 70 уменьшения вибраций может быть легко собран, поскольку ось 72 проходит в отверстии 73а в опорном элементе 73, и поэтому опорный элемент 73 может поворачиваться вокруг оси 72. Кроме того, механизм 70 уменьшения вибраций может иметь простую конструкцию, поскольку опорный элемент 73 может поворачиваться вокруг оси 72 без использования подшипников или иных аналогичных устройств. Также вибрация ручной машины 1, вызванная возвратно-поступательным движением рабочего органа 16, может эффективно гаситься, поскольку груз 71 поворачивается на воображаемой линии, проходящей через геометрическое место точек возвратно-поступательного движения рабочего органа 16, или возле этой линии.
Когда пластинчатые пружины 74 деформируются, в контактных частях 74а, являющихся свободными концами, не возникает больших напряжений. С другой стороны, большое напряжение возникает в основании 74с и в закрепляемой части 74d каждой пластинчатой пружины 74, поскольку основание 74с и закрепляемая часть 74d зажаты между зажимным элементом 77 и опорным элементом 79 пластинчатых пружин. Ближе к контактной части 74а деформируемого участка 74b имеется узкий участок 74b1, и ближе к основанию 74с деформируемой части 74b имеется широкий участок 74b2. Поэтому такая конструкция может обеспечить достаточное усилие, развиваемое каждой пластинчатой пружиной 74, без увеличения ее длины, и при этом величина константы пружины может быть небольшой. Кроме того, может предотвращаться концентрация напряжений на узком участке 74b1, когда пластинчатые пружины 74 деформируются, поскольку используется постепенный переход от широкого участка 74b2 к узкому участку 74b1 в направлении контактной части 74а.
Когда пластинчатая пружина 74 деформируется при отклонении груза 71, возле основания 74с, зажатого между зажимным элементом 77 и опорным элементом 79 пластинчатых пружин, развивается большее напряжение по сравнению с другими частями пластинчатой пружины 74. Более конкретно, наибольшее напряжение развивается возле центра (или возле точки В) основания 74с, движение которого ограничивается в наибольшей степени по сравнению с другими частями. Как правило, в большинстве случаев, когда пластинчатая пружина 74 ломается под действием деформирующих напряжений, разрушение начинается на ее краю. Каждая пластинчатая пружина 74 может сломаться по краю, где развиваются самые большие напряжения, а не в центральной части основания 74с пружины. Обычно форма распределения напряжений в пластинчатой пружине соответствует форме самой пружины, так что развиваемое напряжение в любой точке зависит от ее расстояния от точки (контактная часть 74а) приложения нагрузки, деформирующей пластинчатую пружину 74. Таким образом, на краю пластинчатой пружины 74 наибольшее напряжение развивается на расстоянии L2 от контактной части 74а. Расстояние L2 равно расстоянию L1 от контактной части 74а (точка А) до центральной части (точка В). Иначе говоря, наибольшее напряжение развивается возле широкого участка 74b2 (точка С) и находится немного выше основания 74с (см. фиг.6). Краевая часть основания 74с может немного деформироваться в направлении слева направо (см. фиг.6). Поэтому напряжение в краевой части основания 74с меньше, чем напряжение, развиваемое возле широкого участка 74b2 (точка С). В соответствии с первым вариантом осуществления изобретения зона возле точки С широкого участка 74b2, где развивается наибольшее напряжение, имеет самую большую ширину на участке 74b2. Поэтому напряжение распределяется равномерно по всему краю пластинчатой пружины 74. Это предотвращает разрыв пружины 74 по ее краю. Поэтому срок службы пластинчатой пружины 74 может быть увеличен.
Контактная часть 74а пластинчатой пружины 74 опирается на груз 71 и скользит по нему с высокой частотой в процессе колебаний груза 71. Кроме того, контактная часть 74а шире края узкого участка 74b1, который соединяется с контактной частью 74а. Давление на поверхности между контактной частью 74а и грузом 71 может быть уменьшено, поскольку контактная часть 74а скользит по грузу 71. В результате замедляется износ не только контактной части 74а, но и груза 71.
В механизме 70 уменьшения вибраций груз 71 и опорный элемент 73 прикреплены к опорному элементу 79 пластинчатых пружин с помощью оси 72, а пластинчатые пружины 74 и зажимной элемент 77 прикреплены к опорному элементу 79 пластинчатых пружин с помощью винта 78. Таким образом, механизм 70 уменьшения вибраций собирается в виде отдельного модуля. Механизм 70 уменьшения вибраций может рассматриваться как сборный узел и может быть присоединен к ручной машине 1 и отсоединен от нее каждый раз, когда это будет необходимо. Соответственно, механизм 70 уменьшения вибраций можно легко разобрать, отремонтировать и снова собрать.
Более того, как показано на фиг.7А-7В, механизм 70 уменьшения вибраций можно снять с ручной машины 1 ударного действия, просто вывернув винты 33D, в результате чего с ручной машины 1 может быть снята крышка 33В кривошипного механизма, с последующим извлечением винта 80, используемого для прикрепления механизма 70 уменьшения вибраций к ручной машине 1. Поскольку крышка 33В кривошипного механизма является единственным компонентом, который окружает механизм 70 уменьшения вибраций, то механизм 70 можно легко отсоединить от ручной машины 1 ударного действия. Поэтому механизм 70 уменьшения вибраций можно легко разобрать, отремонтировать и снова собрать. Кроме того, поскольку основная часть 33В1 крышки 33В кривошипного механизма закрывает первое отверстие 31с, и выступающая часть 33В2 крышки 33В кривошипного механизма закрывает второе отверстие 31d, то количество частей в ручной машине 1 может быть уменьшено. Более того, процесс колебаний груза 71 и опорного элемента 73 может быть устойчивым, поскольку механизм 70 уменьшения вибраций прикреплен к отсеку 31В2 картера 31В кривошипного механизма, который изготовлен из алюминия (материал с высокой твердостью).
Ручная машина с возвратно-поступательным движением в соответствии со вторым вариантом осуществления настоящего изобретения описывается ниже со ссылками на фиг.8-10. Ручная машина возвратно-поступательного действия в соответствии со вторым вариантом осуществления изобретения является ручной машиной 101 ударного действия. Частям и компонентам, одинаковым для первого и второго вариантов, присвоены одинаковые ссылочные номера, чтобы исключить повторение описаний, и ниже будут описаны только отличающиеся аспекты второго варианта. Ручная машина 101 ударного действия в соответствии со вторым вариантом осуществления изобретения не содержит вращающегося цилиндра 50 и блока 24 управления, используемого в ручной машине 1 в соответствии с первым вариантом. Поэтому при работе ручной машины 1 ударного действия вращение на рабочий орган 116 не передается, и электродвигатель 21 вращается с постоянной скоростью. Второй вариант отличается от первого варианта двумя особенностями. Во-первых, вместо пластинчатых пружин 74 используются пружины 174, создающие смещающую силу в механизме 170 уменьшения вибраций. Во-вторых, каждая из осей 172, опирающаяся на корпус 131 узла преобразования движения с возможностью вращения, выполнена как единое целое с опорным элементом 173 на его первом конце.
Механизм 170 уменьшения вибраций расположен в корпусе 131 узла преобразования движения. Механизм 170 уменьшения вибраций содержит два узла, которые расположены по обеим сторонам ручной машины 101 ударного действия и симметричны друг относительно друга, причем ось их симметрии совпадает с осью рабочего органа 116. Как показано на фиг.9, каждый узел механизма 170 уменьшения вибраций содержит груз 171, опорный элемент 173, пружины 174 и ограничители 131А отклонения груза. Как показано на фиг.10, опорный элемент 173 имеет первый конец, составляющий единое целое с опорной осью 172, проходящей в направлении, перпендикулярном направлению, в котором проходит опорный элемент 173. Опорная ось 172 также проходит перпендикулярно направлениям возвратно-поступательного движения рабочего органа 116. Опорная ось 172 может вращаться в опорном подшипнике 171C корпуса 131 узла преобразования движения. Центральная линия опорной оси 172 проходит через центр тяжести ручной машины 101 ударного действия. При такой конструкции опорный элемент 173 поворачивается вместе с опорной осью 172. В результате груз 171 вместе с опорным элементом 173 качается вокруг центральной линии опорной оси 172.
Как показано на фиг.9, две пружины 174 имеют первые концы, которые упираются в оба конца груза 171 в направлениях его колебаний. Груз 171 имеет две первые части 171А, отходящие от обоих концов груза 171 в направлениях качания и взаимодействующие с пружинами 174. Первые части 171А, взаимодействующие с пружинами, входят в первые концы пружин 174. Таким образом, каждая первая часть 171А, взаимодействующая с пружиной, соприкасается с внутренней поверхностью соответствующей пружины 174.
Ограничители 131А хода груза 171 расположены на расстоянии от обоих его концов в направлениях его колебаний. Ограничители 131А хода груза 171 закреплены в корпусе 131 узла преобразования движения. Каждый из ограничителей 131А хода груза 171 имеет торцевую поверхность, проходящую перпендикулярно направлениям колебаний. Второй конец соответствующей пружины 174 упирается в торцевую поверхность ограничителя 131А хода груза 171. От торцевой поверхности каждого ограничителя 131А хода груза 171 отходит вторая часть 131В, взаимодействующая с пружиной 174. Вторые части 131В ограничителей 131А, взаимодействующие с пружинами 174, входят во вторые концы этих пружин. Таким образом, каждая вторая часть 131В, взаимодействующая с пружиной, соприкасается с внутренней поверхностью соответствующей пружины 174. Груз 171, первая часть 171А, взаимодействующая с пружиной, и вторая часть 131В, взаимодействующая с пружиной, расположены на воображаемой окружности, описанной вокруг центральной линии опорной оси 172.
Если ручная машина 101 ударного действия не работает, и, соответственно, вибрация отсутствует, то обе пружины 174 отжимают груз 171, установив его в заданное положение, показанное на фиг.9. Когда рабочий орган 116 осуществляет возвратно-поступательное движение, он создает вибрацию в ручной машине 101. Когда груз 171 отклоняется в левую сторону на фиг.9 в результате вибрации ручной машины 101, вызванной возвратно-поступательным движением рабочего органа 116, одна из пружин 174 толкает груз 171 в правую сторону на фиг.9, заставляя его возвращаться в заданное положение. С другой стороны, когда груз 171 отклоняется в правую сторону на фиг.9 в результате вибрации ручной машины 101, вызванной возвратно-поступательным движением рабочего органа 116, другая пружина 174 толкает груз 171 в левую сторону на фиг.9, заставляя его возвращаться в заданное положение. Необходимо иметь в виду, что ограничители 131А хода груза 171 действуют в качестве устройства, определяющего диапазон отклонений груза 171 при качании.
Соответственно, механизм 170 уменьшения вибраций может поглощать вибрацию в некотором частотном диапазоне, имеющем постоянную ширину с центром около резонансной частоты, определяемой грузами 171, опорными элементами 173 и пружинами 174. На практике действительная полоса резонансной частоты будет несколько шире и будет иметь несколько меньшую интенсивность по сравнению с расчетными величинами в связи с действием затухания и некоторых других факторов. Поэтому резонансную частоту задают несколько большей, чем частота вибрации рабочего органа 116.
При отклонении груза 171 первые части 171А, взаимодействующие с пружинами, упираются во вторые части 131В, взаимодействующие с пружинами, ограничителей 131А хода груза 171. Таким образом, ограничители 131А предотвращают выход груза 171 за пределы угла, при котором первые части 171А, взаимодействующие с пружинами, упираются во вторые части 131В, взаимодействующие с пружинами. Иначе говоря, ограничители 131А могут легко ограничивать диапазон углов отклонения груза 171 при качании. Механизм 170 уменьшения вибраций может эффективно снижать вибрацию ручной машины 101 ударного типа, вызываемую возвратно-поступательным движением рабочего органа 116, поскольку механизм 170 содержит два модуля, установленных симметрично относительного оси рабочего органа 116.
Ручная машина возвратно-поступательного действия в соответствии с третьим вариантом осуществления настоящего изобретения описывается ниже со ссылкой на фиг.11. Ручная машина возвратно-поступательного действия в соответствии со вторым вариантом осуществления изобретения является ручной машиной 201 ударного действия. Частям и компонентам, одинаковым для первого и третьего вариантов, присвоены одинаковые ссылочные номера, чтобы исключить повторение описаний, и ниже будут описаны только отличающиеся аспекты третьего варианта. В ручной машине 201 ударного действия в соответствии со вторым вариантом осуществления изобретения механизм 70 уменьшения вибраций установлен в перевернутом положении по сравнению с механизмом 70 ручной машины 1 ударного действия в соответствии с первым вариантом осуществления изобретения. Соответственно, груз 71 расположен внизу в отсеке 31В2, а опорный элемент 79 пластинчатых пружин расположен над грузом 71. Механизм 70 уменьшения вибраций закреплен в отсеке 31В2 с помощью винтов 280.
При такой конструкции механизм 70 уменьшения вибраций можно снять с ручной машины 201 ударного действия, просто вывернув винты 33D (см. фиг.7), в результате чего с ручной машины может быть снята крышка 33В кривошипного механизма, а затем отвернув винт 280, используемый для прикрепления механизма 70 уменьшения вибраций к ручной машине 201. Поскольку крышка 33В кривошипного механизма является единственным компонентом, который окружает механизм 70 уменьшения вибраций, то механизм 70 можно легко отсоединить от ручной машины 201 ударного действия, что позволяет эффективно выполнять разборку, ремонт и сборку механизма 70.
Кроме того, при использовании конструкции в соответствии с третьим вариантом ось вращения груза 71 может находиться на расстоянии от центра тяжести ручной машины 201 ударного действия. Поэтому ось вращения груза 71 при вибрации ручной машины 201 ударного действия может перемещаться на большое расстояние. Соответственно, груз 71 может эффективно качаться в соответствии с вибрацией ручной машины 201 ударного действия. Ручная машина 201 ударного действия в соответствии с третьим вариантом осуществления изобретения действует так же, как и ручная машина 1 в соответствии с вышеописанным первым вариантом.
Ручные машины ударного действия в соответствии с настоящим изобретением не ограничиваются описанными выше вариантами, и в них могут быть внесены различные изменения и улучшения, не выходящие за пределы объема изобретения, определяемого его формулой. Например, как показано на фиг.12, два механизма 70 уменьшения вибраций, аналогичных механизму, использованному в первом варианте осуществления изобретения, могут быть установлены симметрично относительно оси рабочего органа (не показан). При этом механизмы 70 уменьшения вибраций прикрепляются к отсеку 31В2 осями 72, которые служат также болтом.
Кроме того, в третьем варианте осуществления изобретения вместо двух пластинчатых пружин 74 могут использоваться два демпфера, установленных по обеим сторонам груза 71 в направлениях отклонения. Демпферы изготавливаются из упругого материала и обеспечивают ограничение диапазона углов отклонения груза при качании. Поскольку каждый из демпферов груза 71 в такой конструкции опирается на часть отсека 31В2, которая находится напротив груза 71 в направлениях его колебаний, то когда груз 71 отклоняется на второй заданный угол, может быть обеспечено простое и надежное ограничение чрезмерного отклонения (диапазон отклонений) груза 71. Второй заданный угол является углом отклонения груза 71 и опорной оси 73, при котором амортизатор груза 71 упирается в часть отсека 31В2. Поскольку устройство ограничения диапазона отклонений груза 71 содержит два демпфера, то сила удара демпфера может быть поглощена, когда он ударяется с силой в отсек 31В2, в результате чего предотвращается повреждение и деформация отсека 31В2, а также вибрация, вызываемая ударами демпферов.
Кроме того, поскольку вес двух демпферов может добавляться к общему весу груза 71, то общий вес груза 71 может быть увеличен. Два демпфера соответствуют второму контактному элементу. Два демпфера могут быть установлены на отсеке 31В2. В этом случае оба конца груза 71 будут упираться в эти два демпфера, установленных на отсеке 31В2.
Механизмы 70 и 170 уменьшения вибраций в вышеописанных вариантах содержат две пластинчатые пружины 74 и две пружины 174 соответственно. Однако механизмы 70 и 170 могут содержать одну пластинчатую пружину 74 и одну пружину 174.
Форма пластинчатых пружин не ограничивается формой, показанной на фиг.6; могут использоваться пластинчатые пружины 274, показанные на фиг.13. Как видно на фиг.13, каждая из пластинчатых пружин 274 содержит две контактные части 274а, деформируемую часть 274b, основание 274с и закрепленную часть 274d. Пластинчатая пружина 274 имеет V-образный вырез 274f, который выполнен в верхней части и определяет контактные части 274а и две узкие части 274b1. То есть деформируемая часть 274b включает узкие участки 274b1, постепенно суживающиеся в направлении контактных частей 274а. Таким образом, пластинчатая пружина 274 может обеспечивать достаточное возвращающее усилие и в то же время может иметь меньшую длину, и при этом константа пружины может иметь небольшую величину. Кроме того, исключается концентрация напряжений на узком участке 274b1, когда пластинчатая пружина 274 деформируется, поскольку узкий участок 274b1 суживается постепенно в направлении контактной части 74а. В соответствии с формой пластинчатой пружины 274 ее удаленная часть, то есть узкие участки 274b1 возле контактных частей 274а могут иметь малую ширину, и в то же время обеспечивается идеальное распределение напряжений в пластинчатой пружине 274. Поэтому вероятность скручивания пружины 274 при ее деформации невелика, в результате чего увеличивается срок службы пружины.
В качестве вариантов осуществления изобретения в описании были рассмотрены перфораторы и отбойные молотки. Однако настоящее изобретение может использоваться в любой ручной машине, в которой рабочий орган (рабочий инструмент) приводится в возвратно-поступательное движение. Примерами таких ручных машин являются ножовочная пила, лобзиковая пила, ударная дрель, другая импульсно-силовая ручная машина.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИМПУЛЬСНО-СИЛОВАЯ РУЧНАЯ МАШИНА | 2013 |
|
RU2620399C2 |
| РУЧНАЯ МАШИНА | 2010 |
|
RU2555284C2 |
| БУРИЛЬНЫЙ МОЛОТОК | 2008 |
|
RU2453420C2 |
| РУЧНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА, ПРЕЖДЕ ВСЕГО ПЕРФОРАТОР И/ИЛИ ОТБОЙНЫЙ МОЛОТОК, С ДИНАМИЧЕСКИМ ВИБРОГАСИТЕЛЕМ | 2008 |
|
RU2499662C2 |
| ПРИВОДНОЙ ИНСТРУМЕНТ | 2011 |
|
RU2577639C2 |
| СТАНОК ДЛЯ ОБРАБОТКИ КИРПИЧА | 2001 |
|
RU2193967C1 |
| РУЧНАЯ МАШИНА | 2008 |
|
RU2482957C2 |
| ИНЕРЦИОННО-УДАРНЫЙ ИНСТРУМЕНТ (ВАРИАНТЫ) | 2006 |
|
RU2341366C2 |
| УНИВЕРСАЛЬНЫЙ АРТИЛЛЕРИЙСКИЙ КОМПЛЕКС ДЛЯ ТЕЛЕСКОПИЧЕСКОГО ПАТРОНА | 2018 |
|
RU2696949C2 |
| МЕХАНИЗИРОВАННЫЙ ИНСТРУМЕНТ | 2004 |
|
RU2268818C2 |
Группа изобретений относится к ручным машинам с возвратно-поступательным движением рабочего органа. Каждая машина содержит корпус (20, 30), источник (21) энергии привода, механизм (70) уменьшения вибраций и узел (34, 36) преобразования движущей силы, создаваемой источником энергии привода, в возвратно-поступательное движение рабочего органа (16). Механизм (70) содержит ось (72), груз (71), опорный элемент (73) и смещающее устройство (74). Ось (72) установлена с опорой на корпус в направлении, перпендикулярном направлениям движения рабочего органа (16). Опорный элемент (73) поддерживает груз (71) с возможностью качания последнего вокруг центральной линии оси (72). Смещающее устройство (74) стремится сдвинуть груз (71) в заданное положение в направлении его качания относительно корпуса. Обеспечивается уменьшение вибрации и длительный срок службы машин. 3 н. и 23 з.п. ф-лы, 13 ил.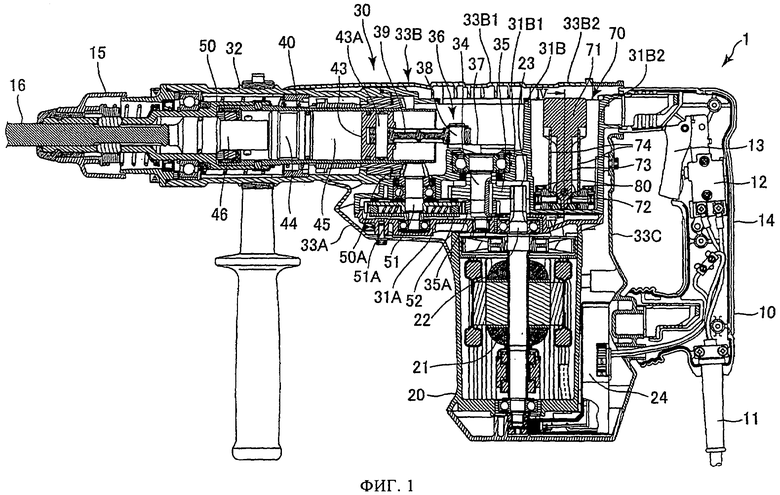
1. Ручная машина с возвратно-поступательным движением рабочего органа, содержащая корпус, расположенный в корпусе источник энергии привода, узел преобразования движения, установленный в корпусе и выполненный для преобразования движущей силы, создаваемой источником энергии привода, в возвратно-поступательное движение, сообщаемое рабочему органу, подвижно установленному с опорой на корпус, и механизм уменьшения вибраций, содержащий ось, имеющую центральную линию, установленную в корпусе и проходящую в направлении, перпендикулярном направлениям возвратно-поступательного движения рабочего органа, груз, установленный на расстоянии от оси с возможностью поворота в направлении качания, опорный элемент, поддерживающий груз с возможностью качания последнего вокруг центральной линии оси, и смещающее устройство, содержащее две пружины, способные контактировать с грузом и сдвигать груз в заданное положение в направлении его качания относительно корпуса.
2. Ручная машина по п.1, в которой предусмотрено два механизма уменьшения вибраций, расположенных симметрично относительно оси рабочего органа.
3. Ручная машина по п.1, которая дополнительно содержит устройство ограничения амплитуды качания, обеспечивающее ограничение диапазона углов качания груза в направлении его качания.
4. Ручная машина по п.3, в которой опорный элемент имеет первый конец, подвижный вокруг центральной линии оси, и второй конец, присоединенный к грузу, причем опорный элемент и груз способны качаться как единое целое, а устройство ограничения амплитуды качания содержит первый контактный элемент, выполненный из упругого материала с возможностью предотвращения выхода груза и опорного элемента в процессе их качания за пределы первого заданного угла, после того как первый конец опорного элемента упрется в первый контактный элемент.
5. Ручная машина по п.3, в которой устройство ограничения амплитуды качания содержит два вторых контактных элемента, по одному на каждом конце груза в направлении его качания, причем каждый из вторых контактных элементов упирается в корпус, когда груз в процессе качания поворачивается на второй заданный угол.
6. Ручная машина по п.1, в которой пружины представляют собой две пластинчатые пружины, каждая из которых имеет первый конец и второй конец, причем первый конец пластинчатой пружины может контактировать с грузом, а второй конец пластинчатой пружины прикреплен к корпусу.
7. Ручная машина по п.1, в которой центральная линия оси находится на расстоянии от центра тяжести ручной машины.
8. Ручная машина по п.1, которая дополнительно содержит ударный механизм, расположенный между рабочим органом и механизмом уменьшения вибраций, и рукоятку на корпусе, причем механизм уменьшения вибраций расположен между ударным механизмом и рукояткой.
9. Ручная машина по п.8, в которой источник энергии привода содержит двигатель с выходным валом, а узел преобразования движения содержит вал кривошипного механизма, проходящий параллельно выходному валу, маховик кривошипного механизма, способный вращаться вместе валом кривошипного механизма, палец кривошипного механизма, способный вращаться вокруг оси вала кривошипного механизма вместе с маховиком кривошипного механизма, и шатун, один конец которого соединен с пальцем кривошипного механизма, а другой конец способен совершать возвратно-поступательное движение в направленииях возвратно-поступательного движения рабочего органа, причем вал кривошипного механизма расположен между выходным валом и ударным механизмом.
10. Ручная машина по п.1, в которой опорный элемент опирается на ось с возможностью качания.
11. Ручная машина по п.1, в которой груз расположен на воображаемой линии, проходящей через геометрическое место точек возвратно-поступательного движения рабочего органа, или возле этой линии.
12. Ручная машина по п.1, в которой смещающее устройство содержит две пластинчатые пружины, имеющие защемленную часть, контактную часть и деформируемую часть, причем защемленная часть прикреплена к корпусу, который ограничивает ее движение, и один ее конец соединен с деформируемой частью, причем контактная часть может контактировать с грузом, а деформируемая часть расположена между защемленной частью и контактной частью и имеет узкий участок, ширина которого в направлении центральной линии оси меньше ширины вышеуказанного одного конца защемленной части.
13. Ручная машина по п.12, в которой ширина узкого участка постепенно уменьшается в направлении контактной части.
14. Ручная машина по п.13, в которой деформируемая часть имеет также широкий участок, ширина которого в направлении центральной линии оси больше ширины вышеуказанного одного конца защемленной части, причем узкий участок расположен между широким участком и контактной частью.
15. Ручная машина по п.14, в которой ширина контактной части в направлении центральной линии оси больше ширины узкого участка.
16. Ручная машина по п.13, в которой корпус содержит отсек для размещения механизма уменьшения вибраций и съемную крышку, закрывающую отсек, а механизм уменьшения вибраций является извлекаемым из отсека посредством снятия крышки.
17. Ручная машина по п.16, в которой механизм уменьшения вибраций выполнен в виде отдельного модуля.
18. Ручная машина по п.16, в которой корпус содержит крышку кривошипного механизма, закрывающую узел преобразования движения и выполненную за одно целое с крышкой отсека механизма уменьшения вибраций.
19. Ручная машина по п.18, в которой корпус содержит картер кривошипного механизма, служащий опорой для узла преобразования движения, выполненный из жесткого материала и включающий отсек механизма уменьшения вибраций.
20. Ручная машина с возвратно-поступательным движением рабочего органа, содержащая корпус, расположенный в корпусе источник энергии привода, узел преобразования движения, установленный в корпусе и выполненный для преобразования движущей силы, создаваемой источником энергии привода, в возвратно-поступательное движение, сообщаемое рабочему органу, подвижно установленному с опорой на корпус, и механизм уменьшения вибраций, содержащий ось, имеющую центральную линию, установленную в корпусе и проходящую в направлении, перпендикулярном направлениям возвратно-поступательного движения рабочего органа, груз, установленный на расстоянии от оси с возможностью поворота в направлении качания, опорный элемент, поддерживающий груз с возможностью качания последнего вокруг центральной линии оси, и смещающее устройство, стремящееся сдвинуть груз в заданное положение в направлении его качания относительно корпуса, и устройство ограничения амплитуды качания, обеспечивающее ограничение диапазона углов качания груза в направлении его качания.
21. Ручная машина по п.20, в которой опорный элемент имеет первый конец, подвижный вокруг центральной линии оси, и второй конец, присоединенный к грузу, причем опорный элемент и груз способны качаться как единое целое, а устройство ограничения амплитуды качания содержит первый контактный элемент, выполненный из упругого материала с возможностью предотвращения выхода груза и опорного элемента в процессе их качания за пределы первого заданного угла, после того как первый конец опорного элемента упрется в первый контактный элемент.
22. Ручная машина по п.20, в которой устройство ограничения амплитуды качания содержит два вторых контактных элемента, по одному на каждом конце груза в направлении его качания, причем каждый из вторых контактных элементов упирается в корпус, когда груз в процессе качания поворачивается на второй заданный угол.
23. Ручная машина с возвратно-поступательным движением рабочего органа, содержащая корпус, расположенный в корпусе источник энергии привода, узел преобразования движения, установленный в корпусе и выполненный для преобразования движущей силы, создаваемой источником энергии привода, в возвратно-поступательное движение, сообщаемое рабочему органу, подвижно установленному с опорой на корпус, и механизм уменьшения вибраций, содержащий ось, имеющую центральную линию, установленную в корпусе и проходящую в направлении, перпендикулярном направлениям возвратно-поступательного движения рабочего органа, груз, установленный на расстоянии от оси с возможностью поворота в направлении качания, опорный элемент, поддерживающий груз с возможностью качания последнего вокруг центральной линии оси, и смещающее устройство, стремящееся сдвинуть в заданное положение в направлении его качания относительно корпуса, причем смещающее устройство содержит две пластинчатые пружины, имеющие защемленную часть, контактную часть и деформируемую часть, причем защемленная часть прикреплена к корпусу, который ограничивает ее движение, и один ее конец соединен с деформируемой частью, причем контактная часть может контактировать с грузом, а деформируемая часть расположена между защемленной частью и контактной частью и имеет узкий участок, ширина которого в направлении центральной линии оси меньше ширины вышеуказанного одного конца защемленной части.
24. Ручная машина по п.23, в которой ширина узкого участка постепенно уменьшается в направлении контактной части.
25. Ручная машина по п.24, в которой деформируемая часть имеет также широкий участок, ширина которого в направлении центральной линии оси больше ширины вышеуказанного одного конца защемленной части, причем узкий участок расположен между широким участком и контактной частью.
26. Ручная машина по п.25, в которой ширина контактной части в направлении центральной линии оси больше ширины узкого участка.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| ЕР 1736283 А2, 27.12.2006 | |||
| УСТРОЙСТВО для ИЗГОТОВЛЕНИЯ БЕСКОНЕЧНОЙ АЛМАЗНОЙ ИЛИ АБРАЗИВНОЙ ЛЕНТЫ | 0 |
|
SU206348A1 |
| ЕР 1637289 В1, 22.11.2006 | |||
| US 6112830 А, 05.09.2000. | |||

