Изобретение относится к области машиностроения и может использоваться в качестве грузоподъемного механизма в различных областях народного хозяйства, в частности для перегрузки крупногабаритных грузов и монтажа длинномерных конструкций.
Известно устройство в виде комплекса из двух одностреловых грузоподъемных кранов, используемое для перемещения общего груза [Персион А.А. Справочник по монтажу специальных сооружений / А.А.Персион, Ю.И.Седых, Ю.Н.Маркман. - 2-е изд., перераб. и доп. - Киев: Будiвельник, 1981, стр.214]. Такое устройство позволяет осуществлять подъем и перемещение в конечное положение крупногабаритных грузов и длинномерных металлических конструкций, обеспечивая при этом заданные координаты угловой ориентации груза в пространстве.
Однако известное устройство обладает следующими недостатками: необходимо обеспечить согласованную работу двух крановщиков и сигнальщика, в сложных случаях необходимо крановщиков и сигнальщика обеспечить двусторонней радиосвязью, перед работой необходимо обеспечить точную привязку каждого крана к заданным точкам на площадке, в процессе работы необходимо одновременно производить контроль: углов отклонения двух грузовых канатов от плоскости подъема для каждого крана, углов отклонения грузовых канатов от гравитационной вертикали, а также углов наклона опорных платформ и ходовой части (шасси) двух кранов к горизонту [Правила техники безопасности при эксплуатации стреловых самоходных кранов ВСН 274-88 (Электронный ресурс) / База нормативной документации: www.complexdoc.ru. URL: http://www.complexdoc.ru/ntdpdf/481136/pravila_tekhniki_bezopasnosti_pri_ekspluatatsii_strelovykh_samokhodnykh.pdf (дата обращения: 21.01.2011), стр.14-20].
При этом возможны: неравномерное распределение нагрузок на краны, расцепление груза со стропами, раскачивание груза при наклонном положении канатов, вызванные несогласованными действиями крановщиков. Это приводит к увеличению времени работы и количества работающего персонала. Затруднена автоматизация процесса вследствие совместного использования двух отдельно стоящих крановых механизмов.
Из известных технических решений наиболее близким по технической сущности к заявляемому объекту является двухстреловой деррик-кран [Вейнблат Б.М. Краны для строительства мостов / Б.М.Вейнблат, И.И.Елинсон, В.П.Каменцев. - М: Транспорт, 1988, стр.120-121]. Он содержит: горизонтальную опорную раму с четырьмя опорами (ходовыми тележками, аутригерами); поворотную платформу; две мачты; несколько стоек-укосин; две стрелы, два механизма подъема груза (привода), состоящих каждый из грузовой лебедки и каната; поддерживающие и направляющие канат-элементы (канатные блоки, поддерживающие скобы и т.п.); грузозахватные приспособления; механизмы подъема двух стрел; механизм поворота крана; подвесные рештования.
Деррик-кран устанавливают стационарно на фундаментах, башенных надстройках, плавучих опорах или используют в качестве передвижного при перемещении по монтируемой конструкции (пролетному строению, ферме).
Горизонтальная рама прямоугольной формы обеспечивает опирание крана на пролетное строение. Ширину и длину горизонтальной рамы устанавливают в каждом отдельном случае с учетом условий размещения крана на монтируемой конструкции и схем передачи па опорные элементы нагрузок и анкерных усилий крана. Необходимо заанкеривание стационарного крана за собираемую конструкцию или специальные фундаменты. На раме сверху размещается поворотная платформа, на которую опираются две вертикально расположенные мачты и две стрелы. В некоторых конструкциях деррик-кранов поворотная платформа отсутствует, при этом мачты и стрелы опираются непосредственно на раму. Опорная точка каждой стрелы находится в основании соответствующей мачты. Каждую мачту поддерживают в верхней части по две или три стойки-укосины, жестко соединенные с рамой. Вместо жестких стоек-укосин могут использоваться канатные растяжки. Механическое и электрическое оборудование деррик-крана смонтировано на раме и на поворотной платформе.
Кран передвижной конструкции оснащен подвесными рештованиями, закрепляемыми к мачтам крана через специальную траверсу. Они занимают по отношению к пролетному строению объемлющее положение, обеспечивая доступ к узлам ферм. Возможно наращивание длины стрел до начала работы.
При работе передвижного деррик-крана колеса ходовых тележек, на которые опирается рама, разгружаются посредством установки тележек на аутригеры. Нагрузки от стрел и мачт передаются на поворотную платформу и на опорно-поворотное устройство с приводом, которое обеспечивает одновременный поворот в плане двух мачт и стрел крана относительно рамы и пролетного строения в процессе работы. В случае отсутствия поворотной платформы поворот в плане двух мачт и стрел крана не осуществляется. При помощи канатных приводов в процессе работы осуществляется также подъем-опускание стрел и подъем-опускание грузовых канатов. Сочетание указанных движений позволяет перемещать груз, закрепленный в двух местах, из начального положения в конечное.
Устройство-прототип обладает следующими недостатками: двухстреловой деррик-кран представляет собой специализированное устройство, которое применяют при движении по пролетным строениям определенного размера, или стационарно. Трудоемкость работ по монтажу и демонтажу подобных кранов для перемещения на другую строительную площадку высока.
Зона, обслуживаемая двухстреловым деррик-краном, ограничена, поскольку подвесные рештования, занимая по отношению к пролетному строению объемлющее положение, препятствуют повороту стрел в плане. В случае использования неповоротной конструкции крана, поворот стрел в плане не производится, что еще более ограничивает зону, обслуживаемую краном.
Конструктивное исполнение двухстрелового деррик-крана делает невозможным поворот в плане одной стрелы относительно другой (проекции осей симметрии двух стрел на горизонтальную плоскость всегда параллельны друг другу), вследствие этого существенно ограничены: возможный угол поворота груза в плане, а также возможный угол наклона груза относительно горизонтали, поскольку по требованиям безопасности положение грузовых канатов в процессе работы должно оставаться вертикальным. Изменение вылета одной стрелы относительно вылета другой при сохранении параллельного расположения проекций их осей, увеличивает расстояние между верхними точками стрел в плане, что приводит к наклонному расположению грузовых канатов, поскольку строповка груза предусматривает постоянное положение мест контакта груза и строп или грузозахватных приспособлений. То есть поворот груза на некоторый угол вокруг вертикальной оси, осуществляемый путем изменения вылетов стрел их подъемом и опусканием, неизбежно вызывает также отклонение грузовых канатов от вертикали на определенный угол. Все перечисленное не позволяет обеспечить заданные значения угловых координат груза в начальном положении, в процессе перемещения и в конечном положении, не нарушая при этом требования безопасности о вертикальном расположении грузовых канатов. Допустимые интервалы линейных координат груза в плане также существенно ограничены. Это снижает технологические возможности крана.
Задачей изобретения является расширение технологических возможностей крана по перемещению крупногабаритных и длинномерных грузов с обеспечением требуемых значений не только линейных, но и угловых координат груза, повышение мобильности, маневренности и независимости передвижения крана, снижение трудоемкости работ по монтажу и демонтажу крана для перемещения на другой объект, по подготовке площадок для его эксплуатации, расширение зоны, обслуживаемой краном.
При этом достигают следующих технических результатов:
- Увеличение конструктивно возможных значений углов поворота стрел в плане. Появление возможности изменения длины стрел в процессе работы крана. Расширение за счет этого геометрических размеров зоны, обслуживаемой краном.
- Появление вращательной подвижности одной стрелы относительно другой в плане. Обеспечение за счет этого заданных в широких пределах значений угловых координат груза в начальном положении, в процессе перемещения и в конечном положении.
- Уменьшение времени работ по монтажу и демонтажу крана для перемещения на другой объект.
- Уменьшение времени работ по подготовке площадок для эксплуатации крана.
Указанных технических результатов достигают тем, что в предлагаемом устройстве, согласно изобретению, кран содержит дополнительную поворотную платформу, по одной для каждой стрелы, при этом стрелы телескопической конструкции, опорная платформа выполнена на базе автомобильного или гусеничного самоходного шасси; кран содержит две поворотные колонны, установленные на поворотной платформе с возможностью независимого поворота каждой поворотной колонны вокруг вертикальной оси относительно поворотной платформы, при этом стрелы телескопической конструкции закреплены каждая на собственной поворотной колонне.
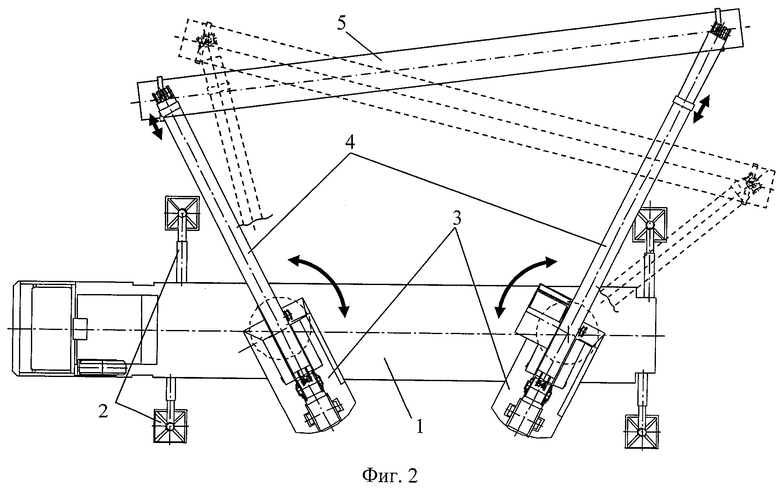
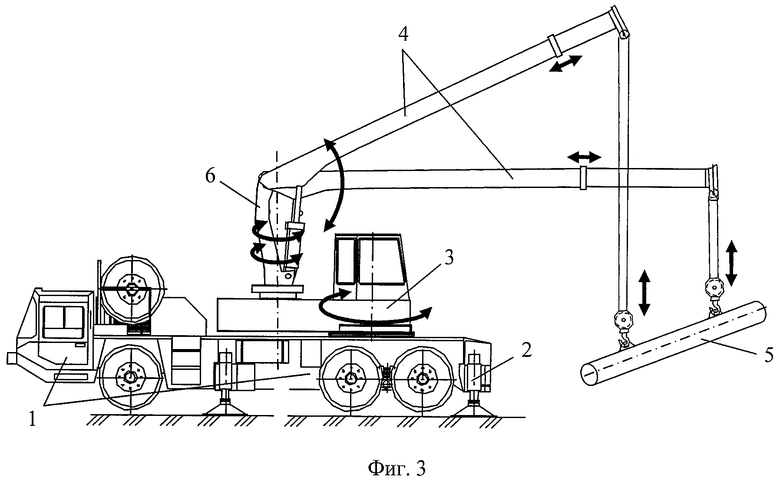
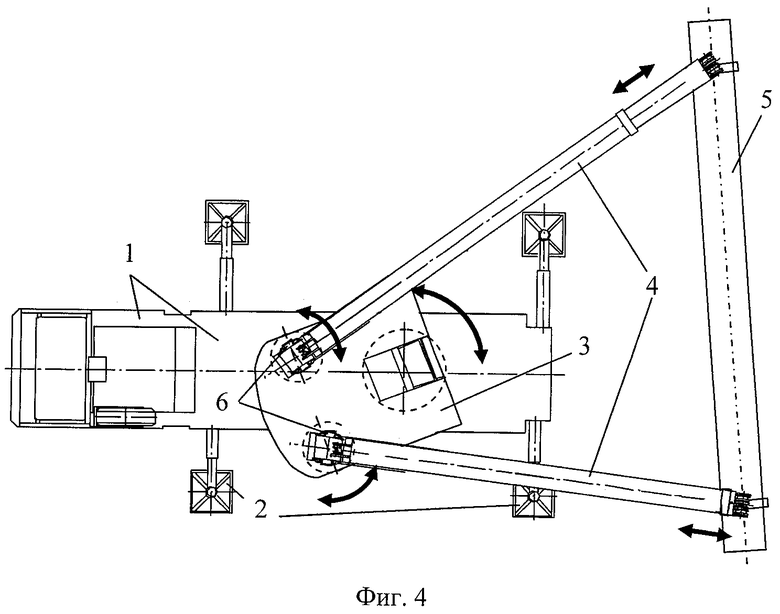
Изобретение поясняется прилагаемыми чертежами, где на фигуре 1 приведен вид сбоку самоходного двухстрелового крана с двумя поворотными платформами, на фигуре 2 - вид сверху (в плане) крана с двумя поворотными платформами, на фигуре 3 - вид сбоку крана с одной поворотной платформой и двумя поворотными колоннами, на фигуре 4 - вид сверху (в плане) крана с одной поворотной платформой и двумя поворотными колоннами.
Вариант 1. Самоходный двухстреловой кран содержит опорную платформу на базе автомобильного или гусеничного самоходного шасси 1 с выносными, выдвижными или откидными опорными элементами 2 в количестве четырех штук, две поворотные платформы 3, две телескопические стрелы 4 (фиг.1, фиг.2).
Две поворотные платформы 3 установлены на опорной платформе 1 с возможностью поворота каждой вокруг вертикальной оси (в плане) на угол не менее 360 градусов. На каждой из двух поворотных платформ смонтирована телескопическая стрела 4, имеющая одну вращательную степень свободы относительно собственной поворотной платформы. Вращение телескопических стрел 4 происходит вокруг горизонтальных осей шарниров, расположенных в основании стрел (нижней части). Телескопические стрелы 4 допускают изменение их длины в процессе работы. Перемещаемый груз 5, который не является частью устройства, связан с оголовками двух телескопических стрел 4, которые перемещают груз 5 при помощи грузовых канатов и строп или грузозахватных приспособлений.
Устройство работает следующим образом. Кран своим ходом перемещается к месту работы. Перед началом работы происходит выдвижение или откидывание опорных элементов 2 и вывешивание на них опорной платформы 1 с одновременным ее горизонтированием. Затем при помощи поворотов поворотных платформ 3, подъема/опускания и изменения длины телескопических стрел 4, их переводят из транспортного положения в положение, в котором оголовки телескопических стрел 4 находятся над точками планируемого закрепления грузозахватных приспособлений или строп на грузе 5. Происходит подъем/опускание грузовых канатов, закрепление груза 5 в двух местах, его подъем и перемещение в конечное положение при помощи указанных выше движений поворотных платформ 3, телескопических стрел 4 и грузовых канатов. После этого груз освобождают от грузозахватных приспособлений или строп и начинают цикл перемещения следующего груза, либо происходит завершение работы.
Вариант 2. Самоходный двухстреловой кран содержит опорную платформу на базе автомобильного или гусеничного самоходного шасси 1 с выносными, выдвижными или откидными опорными элементами 2 в количестве четырех штук, одну поворотную платформу 3, две поворотные колонны 6, две телескопические стрелы 4 (фиг.3, фиг.4).
Поворотная платформа 3 установлена на опорной платформе 1 с возможностью поворота вокруг вертикальной оси (в плане) на угол не менее 360 градусов. На ней установлены две поворотные колонны 6, которые имеют каждая одну вращательную степень свободы относительно поворотной платформы. Вращение поворотных колонн 6 также происходит вокруг вертикальных осей. На каждой из двух поворотных колонн 6 смонтирована телескопическая стрела 4, имеющая одну вращательную степень свободы относительно собственной поворотной колонны 6. В остальном конструкция крана с одной поворотной платформой и двумя поворотными колоннами аналогична описанной выше конструкции крана с двумя поворотными платформами.
Работа устройства с одной поворотной платформой и двумя поворотными колоннами аналогична описанной выше работе устройства с двумя поворотными платформами, за исключением увеличения на одну единицу количества степеней подвижности всего механизма (помимо двух вращательных перемещений поворотных колонн 6 вокруг вертикальных осей на поворотной платформе 3, последняя имеет свое собственное вращательное перемещение вокруг вертикальной оси на опорной платформе 1). Это еще более увеличивает размеры зоны, обслуживаемой краном, в плане, по сравнению с устройством с двумя поворотными платформами.
Общими признаками прототипа и заявляемого устройства являются: рамная конструкция опорной платформы (базового шасси); поворотная платформа; две стрелы; две мачты (две поворотные колонны) для устройства с одной поворотной платформой и двумя поворотными колоннами; механизмы приводов.
Отличительными признаками являются: мобильный характер опорной платформы на базе автомобильного или гусеничного самоходного шасси; количество поворотных платформ (две) в устройстве с двумя поворотными платформами; возможность независимого поворота каждой из двух поворотных колонн вокруг вертикальной оси на поворотной платформе в отличие от неповоротных мачт прототипа (в устройстве с одной поворотной платформой и двумя поворотными колоннами); телескопическая конструкция стрел.
Для изготовления изобретения могут использоваться серийно выпускаемые компоненты грузоподъемных кранов и кранов-манипуляторов: базовые шасси, поворотные платформы, телескопические стрелы, поворотные колонны, компоненты приводов.
Использование новых элементов (вторая поворотная платформа в устройстве с двумя поворотными платформами, либо две обладающих возможностью независимо вращаться поворотных колонны в устройстве с одной поворотной платформой и двумя поворотными колоннами) обеспечивает возможность изменения угла в плане между двумя стрелами. Это расширяет зону, обслуживаемую краном в плане, и позволяет обеспечить заданные значения угловых координат груза без помощи стропальщиков в начальном положении, в процессе перемещения и в конечном положении в широких пределах, не нарушая при этом требования безопасности по вертикальному расположению грузовых канатов.
Использование новых элементов (стрел телескопической конструкции) обеспечивает увеличение возможных значений вылета стрелы и высоты подъема груза и расширяет геометрические размеры зоны, обслуживаемой краном.
Использование новых элементов (мобильное базовое шасси опорной платформы) обеспечивает повышение мобильности, маневренности и независимости передвижения крана как в пределах той или иной строительной площадки, так и между ними, снижение трудоемкости и стоимости работ по монтажу и демонтажу крана для перемещения на другой объект, по подготовке площадок для его эксплуатации. Обеспечивается возможность использования крана вне пролетных строений, повышается его универсальность и технологичность.
Структура и особенности заявляемого изобретения позволяют обеспечить требуемые значения как линейных, так и угловых координат груза в широких пределах. Изготовление изобретения производится из узлов и агрегатов, серийно выпускаемых промышленностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОХОДНЫЙ ПОДЪЕМНЫЙ КРАН И СПОСОБ ОБЕСПЕЧЕНИЯ ЕГО РАБОТЫ | 2008 |
|
RU2467946C2 |
| САМОХОДНЫЙ ПОДЪЕМНЫЙ КРАН И СПОСОБ ОБЕСПЕЧЕНИЯ ЕГО РАБОТЫ (ВАРИАНТЫ) | 2007 |
|
RU2464221C2 |
| ПОДЪЕМНЫЙ КРАН С ПЕРЕМЕЩАЕМЫМ ПРОТИВОВЕСОМ | 2010 |
|
RU2556678C2 |
| САМОХОДНЫЙ ПОДЪЕМНЫЙ КРАН И СПОСОБ ЕГО СБОРКИ (ВАРИАНТЫ) | 2008 |
|
RU2476371C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2010 |
|
RU2449903C1 |
| ПОДЪЕМНЫЙ КРАН (ВАРИАНТЫ) И СПОСОБ ЕГО НАЛАДКИ | 2010 |
|
RU2542831C2 |
| КРАН-МАНИПУЛЯТОР НА ГРУЗОВОМ АВТОМОБИЛЕ | 2013 |
|
RU2545698C1 |
| Передвижное подъемное устройство для монтажа длинномерных секционных конструкций | 1981 |
|
SU989016A1 |
| КРАН СТРЕЛОВОЙ САМОХОДНЫЙ | 2014 |
|
RU2567472C1 |
| Деррик-кран | 1989 |
|
SU1775351A1 |
Изобретение относится к области машиностроения и может использоваться в качестве грузоподъемного механизма в различных областях народного хозяйства, в частности для перегрузки крупногабаритных грузов и монтажа длинномерных конструкций. Самоходный двухстреловой кран содержит две поворотные платформы или две поворотные колонны, по одной для каждой стрелы, используются стрелы телескопической конструкции, опорная платформа выполнена на базе автомобильного или гусеничного самоходного шасси. Достигается расширение технологических возможностей крана по перемещению крупногабаритных и длинномерных грузов с обеспечением требуемых значений не только линейных, но и угловых координат груза, повышение мобильности, маневренности и независимости передвижения крана, снижение трудоемкости работ по монтажу и демонтажу крана для перемещения на другой объект. 2. н.п. ф-лы, 4 ил.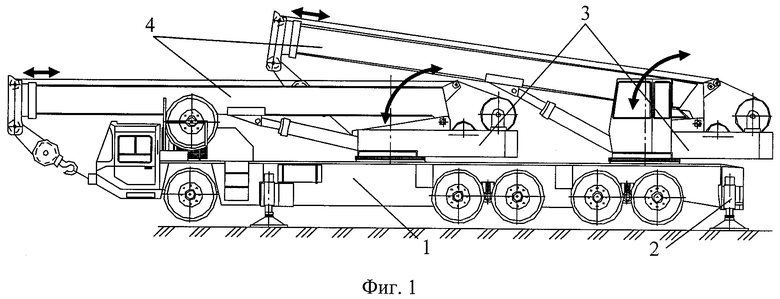
1. Самоходный двухстреловой кран, содержащий опорную платформу, поворотную платформу, две стрелы, механизмы приводов, отличающийся тем, что кран содержит дополнительную поворотную платформу, по одной для каждой стрелы, при этом стрелы телескопической конструкции, опорная платформа выполнена на базе автомобильного или гусеничного самоходного шасси.
2. Самоходный двухстреловой кран, содержащий опорную платформу, поворотную платформу, две стрелы, механизмы приводов, отличающийся тем, что кран содержит две поворотные колонны, установленные на поворотной платформе с возможностью независимого поворота каждой поворотной колонны вокруг вертикальной оси относительно поворотной платформы, при этом стрелы телескопической конструкции закреплены каждая на собственной поворотной колонне.
| ВЕЙНБЛАТ Б.М | |||
| и др | |||
| Краны для строительства мостов | |||
| Изд | |||
| третье переработанное и дополненное | |||
| - М.: ТРАНСПОРТ, 1988, с.120, 121 | |||
| US 5018630 А, 28.05.1991 | |||
| Грузоподъемное судно катамаранного типа | 1977 |
|
SU885101A1 |

