(54) ГРУЗОПОДЪЕМНОЕ СУДНО КАТАМАРАННОГО ТИПА

| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК И ДРУГИХ СУДОВ | 2009 |
|
RU2390460C1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА ОБЪЕКТОВ СО ДНА МОРЯ НА ПОДВОДНОЕ ТЕХНИЧЕСКОЕ СРЕДСТВО | 2008 |
|
RU2368531C1 |
| СПОСОБ СОЗДАНИЯ ПЛАВУЧЕГО ПОЛУПОГРУЖНОГО БУРОВОГО СУДНА И ЕГО УСТРОЙСТВО | 2013 |
|
RU2524700C1 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО СУДНА И КОМПЛЕКС ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК И ДРУГИХ СУДОВ | 2012 |
|
RU2479460C1 |
| ГРУЗОПОДЪЕМНОЕ УСТРОЙСТВО ДЛЯ ПОДЪЕМА ЗАТОНУВШИХ ОБЪЕКТОВ | 2020 |
|
RU2755358C1 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО СУДНА И КОМПЛЕКС ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВАНИЯ ЗАТОНУВШИХ ПОДВОДНЫХ ЛОДОК И ДРУГИХ СУДОВ | 2014 |
|
RU2564271C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2016 |
|
RU2613181C1 |
| СИСТЕМА ШВАРТОВКИ С ОТДЕЛЕННЫМИ ЯКОРНЫМИ ОТТЯЖКАМИ И/ИЛИ СИСТЕМОЙ ВОДООТДЕЛЯЮЩИХ КОЛОНН | 2010 |
|
RU2519456C2 |
| ОТСОЕДИНЯЕМАЯ ТУРЕЛЬНАЯ ЯКОРНАЯ СИСТЕМА С ВРАЩАЕМОЙ ПОВОРОТНОЙ ПЛАТФОРМОЙ | 2009 |
|
RU2489300C2 |
| Судоподъемный комплекс, твердотопливный газогенератор и способ судоподъема | 2018 |
|
RU2700431C1 |
t
Изобретение относится к судостроению, в частности к грузоподъемным судам.
Известно грузоподъемное судно катамаранного типа, содержащее корпуса со смонтированны на них силовой установкой и подъемно-опускным устройством и якорную систему fl.
Однако такое судно обладает малыми остойчивостью и эксплуатационными возможностями.
Цель изобретения - повышение остойчивости и эксплуатационшлх возможностей грузоподъемного судна.
Для достижения поставленной цели подъемно-опускное устройство гр гзоподъемно-опускное устройство грузоподъемного судна содержит четыре колонны, установленные посудна с возможностью перемещения в вертикальной плоскости и снабженные люнетами, четыре несущие штанги о цапфами, расположенными в их верхней части, и восемь кронштейнов, при
этом в верхней части каждой колонны установлен с возможностью перемещения вдоль колонны один из люнетов, четыре кронштейна закреплены по одному на каждом из люнетов, а четыре других кронштейна закреплены попарно со стороны внутренних бортов корпусов судна,каждая несущая штанга связана посредством цапфы с кронштейном одного из люнетов и сопряжена
10 своей нижней частью с одним из кронштейнов, закрепленным на борту корпуса судна.
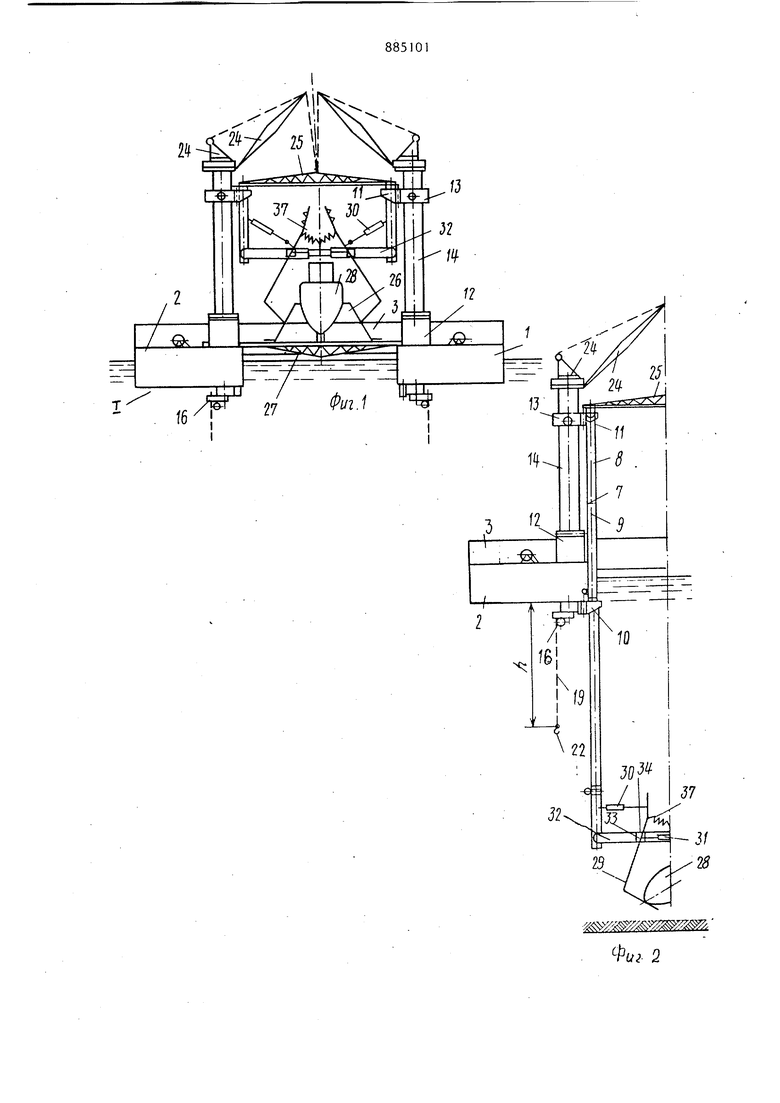
На фиг.1 схематически изображено грузоподъемное судно, вид с кормы
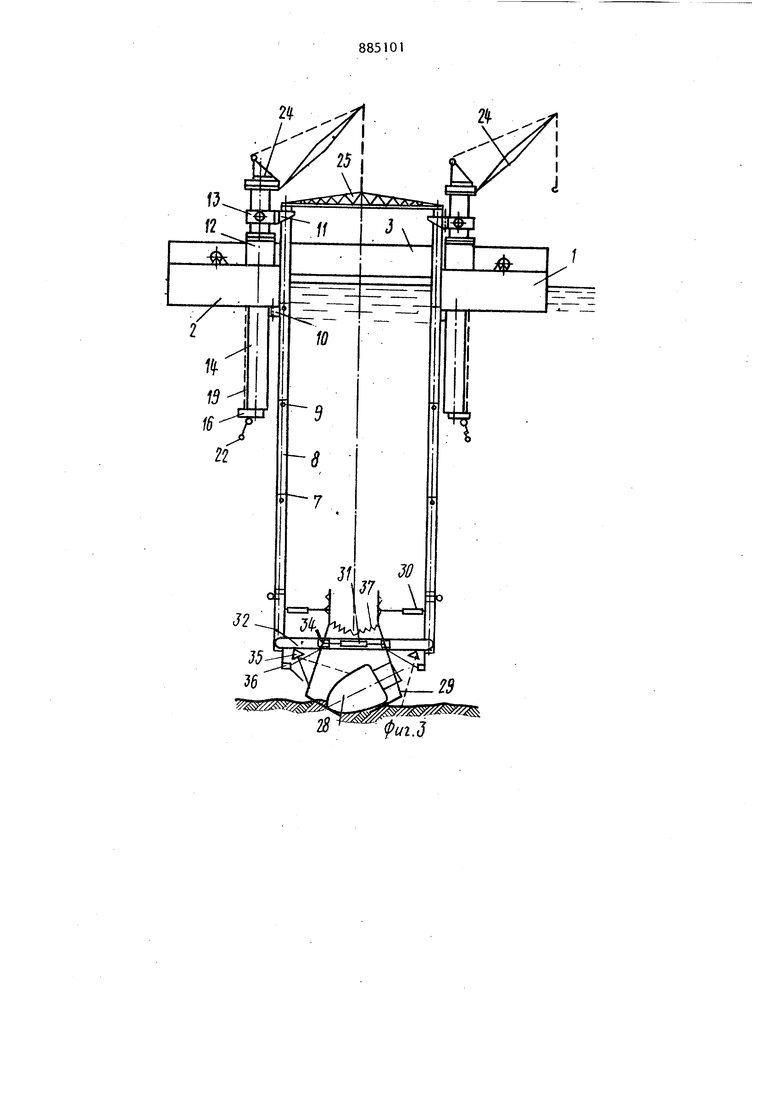
1$ i с аварийным судном, поднятым со дна моря и установленным на ложементе съемной платформы ; на фиг.2 - то же, с опущенной несущей штангой с зяхватным механизмом; на (Ъиг.З - то
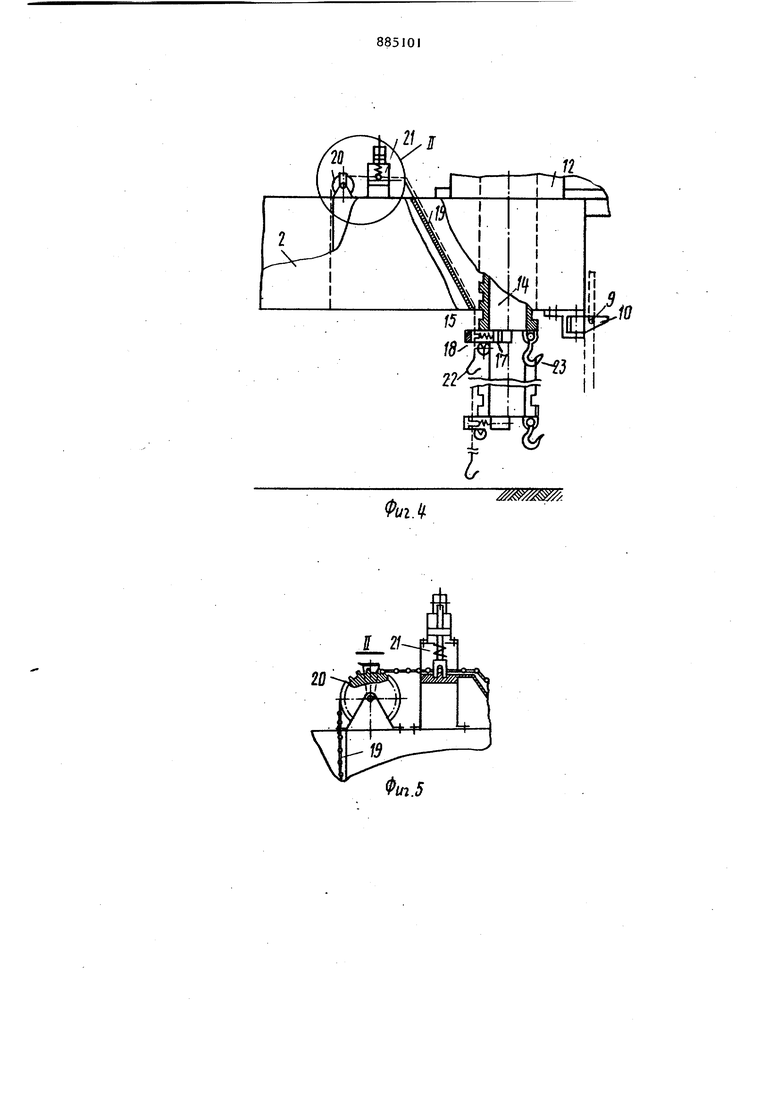
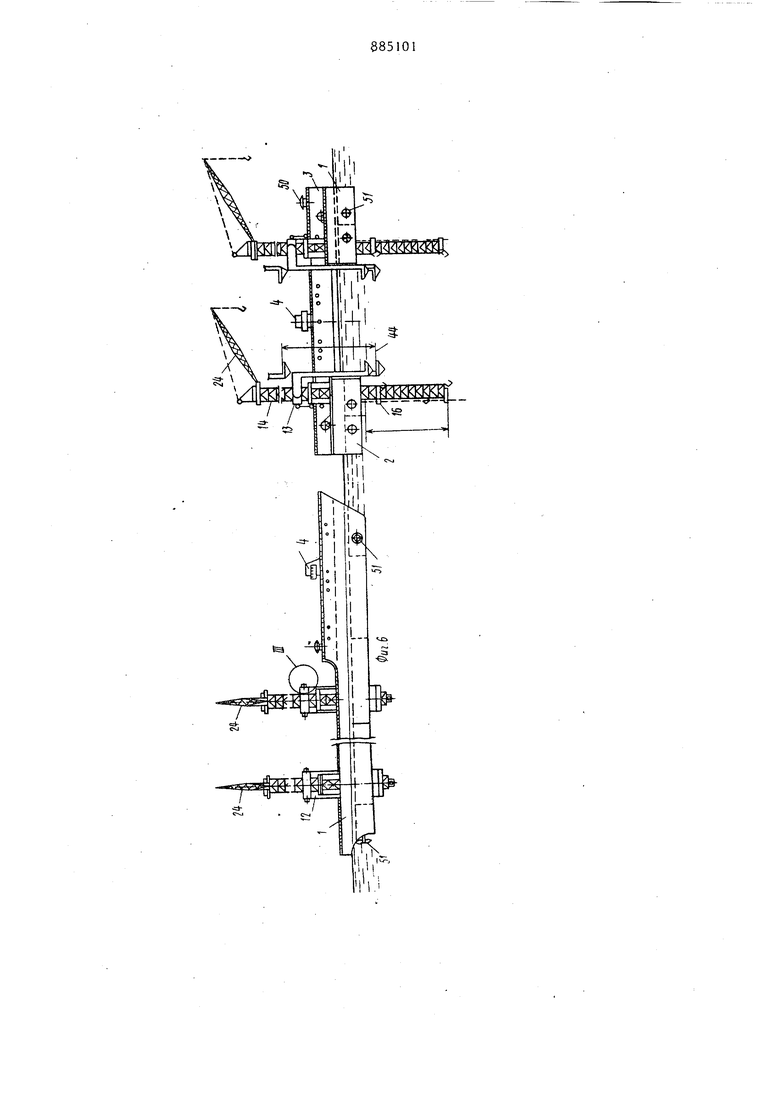
20 же, в момент захвата аварийного (затонувшего) судна; на. фиг.4 - узел 1 на фиг.1; на фиг.5 - узел П на фиг.4; на фиг.6 - грузоподъемное судно,вид
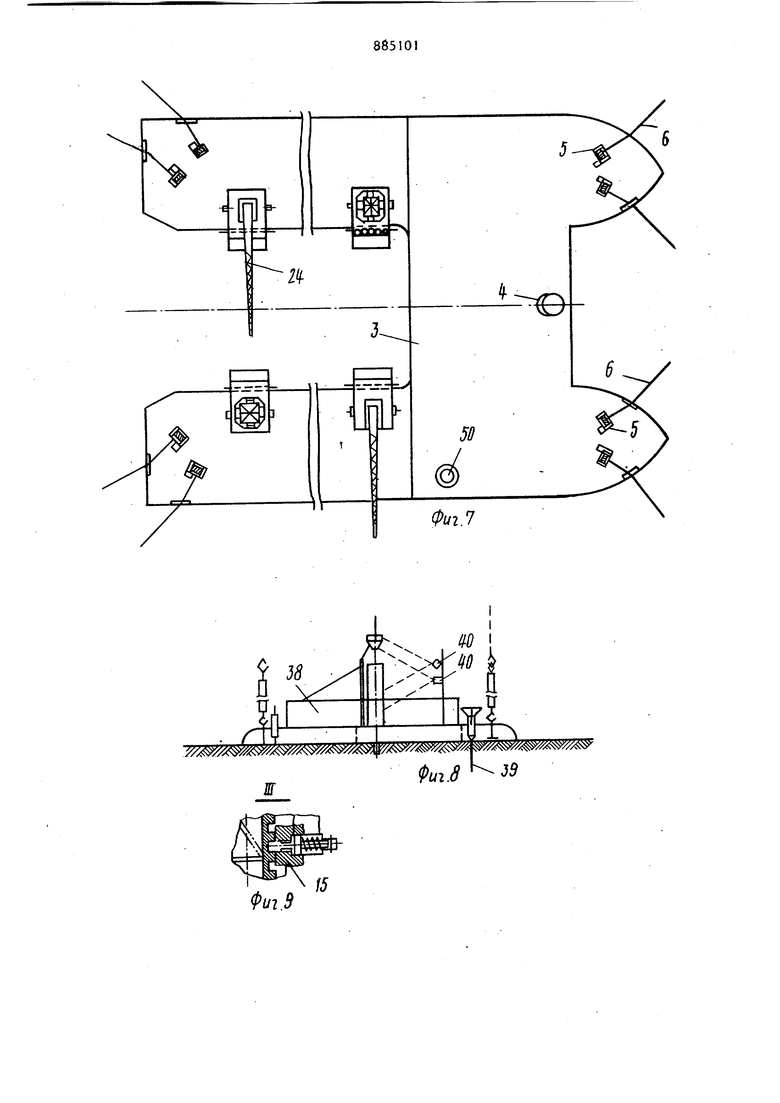
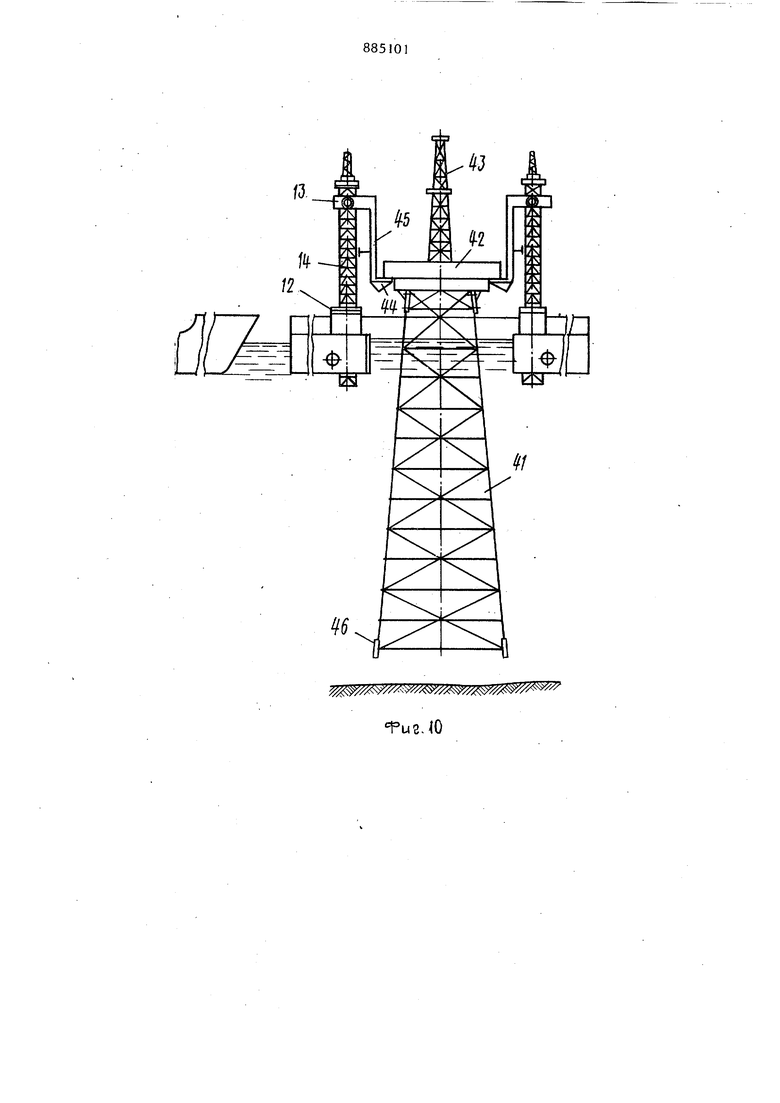
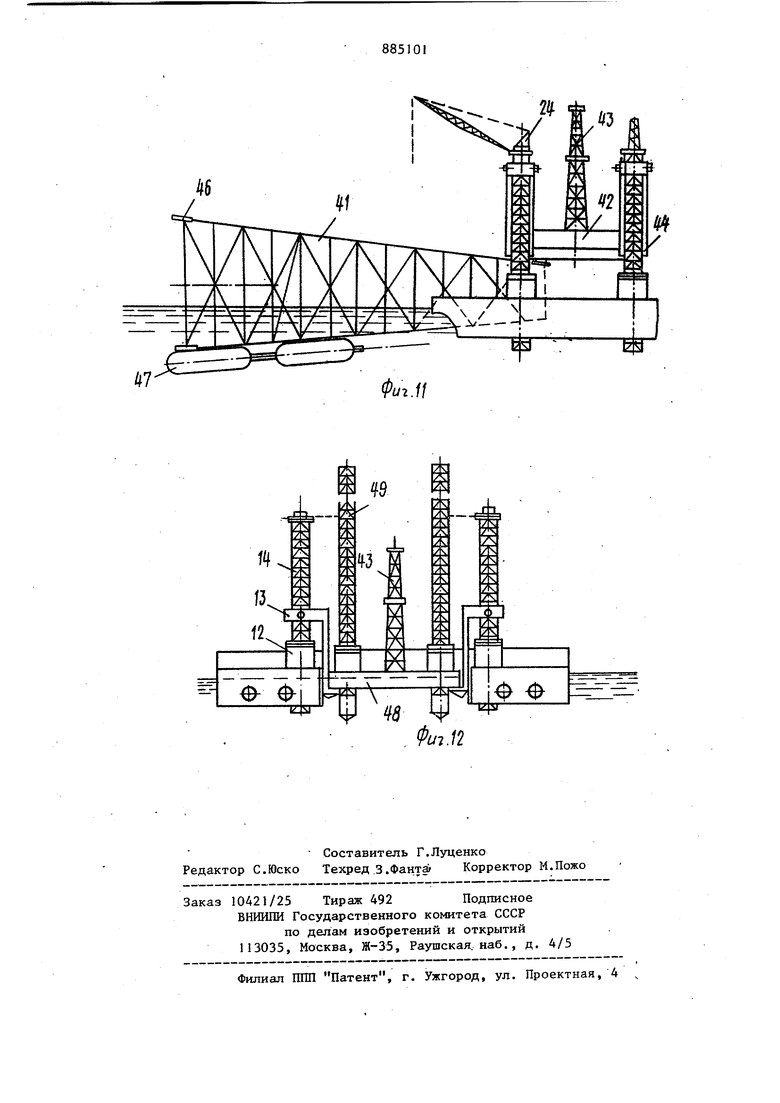
сбоку; на фиг.7 - то же, в плане; на фиг.8 - то же, вид с кормы при монтаже (демонтаже) подводной буровой установки на дне моря; на фиг.9 узел Ш на фиг.6; на фиг.10 - грузоподъемное судно, вид с кормы при демонтаже (монтаже) опорной колонны мор ской буровой платформы; на фиг.11то же, вид сбоку, при транспортировании опорной колонны морской буровой платформы; на фиг.12 - то же, вид с кормы, при транспортировании полупогружной плавучей буровой установ,ки.
Грузоподъемное судно является автономным самоходным плавсредством и содержит два несущих корпуса 1 и 2, жестко соединенных между собой технологической площадкой 3 с рубкой управления 4. Оно снабжено натяжными лебедками 5 с гибкими связями 6, соединяющими его с установленными на дне моря якорями Сне показаны), Между корпусами 1 и 2 установлены HecyiJ e штанги, снабженные захватным механизмом и выполненные из сое диняемых между собой замками 7 полых секций 8 с цапфами 9. Секции 8 соединены с воздушным компрессором (не показан), посредством которогб плавучесть штанг (т.е. секций 8) может изменяться от отрицательной до положительной или нейтральной. Кажда из упомянутых штанг подвешена на подвижных кронштейнах 10 и 11, первы из которых укреплен на корпусе 1 (2) а второй - на установленном подъемника 12 люнете 13, охватывающем пропущенную в корпусе I (2) подвижную колонну 14 с рейками 15. Нижний торец колонн 14 снабжен дистанционно управляемым стопором 16,включающим подпружиненный шток с поршнем 17 (фиг.4) гидроцилиндра 18, которым фиксируется цепь 19 подающего Мехаг-. низма, установленного в корпусе 1 (2) и выполненного в виде подающей звездочки 20 (ее привод не показан), охватываемой цепью 19, складируемой в корпусе 1 (2), и снабженного дополнительным управляемым стопором 21, по конструкции аналогичным стопору 16.
В нерабочем положении цепь 19, снабженная крюком 22, свободно проходит в стопоре и крюк 22 находится на, глубине п (фиг. 2) от днища корпуса 1 (2).
Колонны 14 снабжены внизу вспомогательными крюками 23, а верхние торцы этих колонн - подъемно-поворотными кранами 24. Люнеты 13 могут быть попарно соединены фермами 25. Ложемент 26 может быть установлен на съемной платформе 27, а в нем закреплено транспортируемое (аварийное) судно 28.
Захватный механизм выполнен в виде
: вилок 29, приводимых в движение гидроцилиндрами 30.Шрина раскрытия (захвата) вилок 29 регулируется дистан-д ционно управляемым гидроцилиндром 31, размещенным в соединяющей нижние концы несущих штанг на балке 32 нейтральной плавучести.
Штоки гидроцилиндра 3I шарнирно соединены с сухарями 33, в которых шарнирно укреплены оси 34 вилок 29. Захватное устройство освещается прожекторами 35 и снабжено телевизионными установками 36 для наблюдений за его работой. Пружина со шпангами 37 обеспечивает подачу рабочей жидкости в гидроцилиндр 31 при любом положении вилок 29.
Автономная буровая подводная установка 38 (фиг.8) , снабжена анкерами 39, скрепляющими ее со дном моря, осветительным и телевизионным оборудованием 40.
Несущая (опорная колонна 41 морской буровой платформы 42 с буровой ВБШ1КОЙ 43 при подъеме (фиг.10) и транспортировании удерживается подхватами 44 и раскрепляется растяжками 45.Она снабжена креплениями 46 для установки на дне моря. Для транспортирования колонны 41 на значительные расстояния последняя снабжена понтонами-поппавками 47.
Подхваты 44 используются также при транспортировании полупогружной буровЪй платформы 48 вместе с опорами 49.
Вспомогательное техническое судно укомплектовано автономным наблюдательным подводным аппаратом 50, например типа Оса и снабжено гребными винтами 51.
Вспомогательное техническое судно используется для подъема затонувших или вьшолняюпщх технологические операции крупнотоннажных объектов с
больших глубин (фиг.1-3); установки на дне и подъема относительно легких объектов при необходимости варьирова5ния их местоположением относительн неподвижного (заякоренногоJ вспомогательного технического судна (фиг демонтажа (монтажа) опорных колонн буровых установок (фиг. 10| , опор мо тов и т.п., транспортирования по морю различных технических объектов При работе по первому варианту д опускания каждой штанги,состоящей из секции 8, на дно моря из положания, когда она опирается цапфами 9 на оба кронштейна 10 и 11 (фиг.2), подъемником 12 приподнимают вверх колонну 14 с прикрепленным к ней люнетом 13 с кронштейном 11. Так как кронштейн 10 по вертикали не перемещается, то вся штанга, опираясь цапфами 9 на кронштейн 11, сним ется с кронштейна 10, который отводится от штанги путем поворота относительно оси (.Лиг.2) его симметрично выполненных половин. Этот отвод можно осуществлять и путем горизонтального перемещения кронштейна 10 в направляющих, которыми можно снабдить днище корпуса 1. Затем колонну 14 опускают вниз на расстояние, равное длине секции 8 штанги, возвращают кронштейн 10 в исходное положение с последующим опусканием колонны 14 со штангой, вес последней переносят на этот кронштейн. Вследствие этого кронштейн 1 1 освобождается от взаимодействия со штангой и отводится от нее аналогично кронштейну 10. Краном 24 подают к штанге сверху очередную секцию 8 и посредством замка 7 соединяют с ней. С помощью фермы 25 можно подават к штангам одновременно несколько пар секций 8. .В это время колонну 14 вместе с люнетом 13 поднимают вверх до тех пор, пока станет возможным соединит кронштейн 11 с верхним торцом подсоединенной секции штанги. Далее процедура нарагцивания секций 8 и опускания штанг продолжается в том же порядке. При приближении захватного меха«изма к объекту, находящемуся на дн моря, например к затонувшему судну 28, на основе информации, поступающей в рубку 4 от приемников телевизоров 36, направленных объективами на освещаемое прожекторами 35 судно 28, корректируют ширину захвата захватного механизма гидроцилиндром 14 3I и с ПОМОЩЬЮ гидроцилиндров 30 вращают вилки 29 на осях 34, захватывая ими судно 28. Указанные операции контролируются также с наблюдательного подводного аппарата 50. После этого путем выполнения операций, обратных описанным выще для опускания вниз штан,последние поднимают вверх вместе с судиом 28. Нагнетая или откачивая компрессором воздух ( легкий газ) в секции 8, обеспечивают необходимую подъемную силу и мигамапьные разрывные напряжения в секциях 8. Поднятое таким образом судно 28 принимает ремонтное дополнительное судно (не показано} или его устанав ливают на ложементе 26 съемной платформы 27 (фиг.1) и ремонтируют или транспортируют. В условиях, когда предъявляются особые требования к скорости подъема и необходимости маневрирования опускаемым ( поднимаемым ) объектом относительно вертикальной оси технического судна применение приведенной схемы не целесообразно, так как процедура наращивания секций 8 и их разборки требует относительно больших затрат времени. В этих условиях подходит применение цепей (например гусеничных ). Однако, цепные лебедки конструктивно сложны и характеризуются значительными габаритами и весом и содержат сложные полиспастные системы. Цепной кран для рассматриваемых условий вообще сложно реализовать. Предлагаемая конструкция позволяет применять цепные гибкие связи без использования крупногабаритных и мощных барабанов. При работе по второму варианту используют цепи 19 с крюками 22- или другими захватами. Опускание каждой цепи 19 на дно моря осуществляют посредством привода звездочки 20 при отключенных стопорах 16 и 21. К крюкам 22 может быть присоед1-1нена опускаемая на дно моря подводная буровая установка 38 ((Ьиг.8, которую после опускания закрепляют на дне анкерами 39. Затем цепи 19 поднимают вверх тем же приводным механизмом со звездочкой 20. При необходимости подъема со дна моря цепями относительно тяжелого . 7 объекта, находящегося с некоторым смещением относительно вертикали заявляемого судна, используют силу, развиваемую подъемниками 12 на колоннах 14. При этом цепи 19 фиксируют наниж нем конце (торце7 каждой колонны 14 посредством стопоров 16 и затем колонны 14 синхронно поднимают вверх подъемниками 12 вместе с зафиксированными на них цепями 19. Незагружен ный весом поднимаемого объекта участок цепи 19 между звездочкой 20 и, стопором 16 поднимают путем вращения звездочки 20. Выбрав свободный ход |(фиг.2 ко лонны 14, цепь. 19 с поднимаемым грузом фиксируют стопором 21, отключают стопор 16 и колонну 14 опускают на величину ti . Стопором 16 фиксируют цепь 19, а стопор 21 от нее отключают. Далее процедура подъема выполняется в той же поседовательно ти. При работе по третьему и четверт му вариантам подхватами 44 поднимаю посредством платформы 42 опору 41 путем вертикальных перемещений колонн 14. Для уменьшения качки опоры 41 по хваты 44 фиксируют растяжками 45 (Фиг. 1с. Опору 41 снабжают внизу понтонам 47 для обеспечения ее плавучести, кранами 24 опору 41 частично или полностью отсоединяют от платформы 42 и придают ей наклонное положение (фиг.1. При этом она, будучи за цищена от волнового и ветрового воз действия, безопасно доставляется техническим судном в заданное мест Технология установки полупогружной буровой платформы 48 на техническом судне и ее транспортировка показаны на фиг.12. Формула изобретения Грузоподьемное судно катамаранного типа, содержащее корпуса со смонтированными на них силовой установкой и подъемно-опускным устройством и якорную систему, отличающееся тем, что, с целью повьшения остойчивости и эксплуатационных возможностей, подъемнО7Опускное устройство содержит четыре колонны, установленные попарно со стороны внутренних бортов судна с возможностью пере мещения в вертикальной плоскости и снабженные люнетами, четыре несущие штанги с цапфами,расположенными в их верхней части,и восемь кронштейнов, при этом в верхней части каждой колонны установлен с возможностью перемещения вдоль колонны один из люнетов, четыре кронштейна закреплены по одному на каждом из люнетов, а четыре других кронштейна закреплены попарно со стороны внутренних бортов корпусов судна, каждая несущая штанга связана посредством цапфы с кронштейном одного из люнетов и сопряжена своей нижней частью с одним из кронштейнов,закрепленным на борту корпуса судна. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 389986, кл. В 63 В 35/44, 1971 (прототип).
Фаг 2
2
гз
(fui.j
20
П
.
ФигЛ
-
50
Фиг.7
ДГ
Фт.З д
f3
6
« PusJO
фиг.11
