Область техники
Изобретение относится к области техники коробок передач/трансмиссий. В частности, настоящее изобретение обеспечивает новый тип реверсивной переменной трансмиссии для транспортных средств, таких как автомобили, автобусы, машины для грузовых перевозок, внедорожные автомобили, подъемно-транспортные тележки, манипуляторы с телескопической штангой и тому подобное. В качестве альтернативы, может быть использована коробка передач в системах, таких как ветряные двигатели и т.п. и других промышленных применениях, в которых требуется передача мощности при различных скоростях.
Уровень техники
Преимущества настоящего изобретения лучше всего могут быть описаны путем иллюстрации различий между идеальной и существующей в настоящий момент автомобильными трансмиссиями.
Идеальная трансмиссия
Теоретически идеальная автомобильная трансмиссия передает мощность двигателя на колеса так, что для любого требуемого уровня мощности двигатель функционирует в точке его наивысшей эффективности, вне зависимости от скорости автомобиля.
Как показано на графике, изображенном на фиг.10, показывающем удельный расход топлива дизельного двигателя, двигатель функционирует в точке его наивысшей эффективности, когда педаль управления дроссельной заслонкой полностью нажата. Мощность модулируется скорее за счет изменения скорости вращения двигателя, а не за счет изменения дросселя. Например, езда по скоростной магистрали с постоянной скоростью 120 км/ч требует только около 25 л.с. Тогда оптимальная скорость вращения двигателя составляет около 1300 об/мин для современных двигателей. Тогда требуемое отношение крутящих моментов трансмиссии составляет 0,441, в то время как типичное отношение существующей на данный момент коробки передач изменяется от 0,90 до 0,65 при наивысшем отношении. Вывод заключается в том, что отношения имеющихся на данный момент коробок передач не на столько высокие, чтобы оптимизировать эффективность двигателя.
Фиг.10 иллюстрирует вышеприведенное утверждение. С использованием известных коробок передач автомобиль движется при 120 км/ч при 2400 об/мин и с 73 Нм от двигателя. Тогда удельный расход топлива (SFC) составляет 265 г/кВтч. В идеальном случае (низкого крутящего момента двигателя) скорость вращения двигателя должна быть уменьшена только до 1700 об/мин для получения наивысшей эффективности. Тогда двигатель вырабатывает 103 Нм с SFC 225 г/кВтч. Это составляет экономию топлива 15%. Например, это составляет экономию топлива от 6,5 л/100 км до 5,5 л/100 км, получаемое только в результате регулирования рабочей точки двигателя, не рассматривая эффективность трансмиссии.
Для разгона идеальной трансмиссии необходимо бесконечно большое отношение крутящего момента.
Когда автомобиль не движется, и скорость вращения двигателя является, по меньшей мере, скоростью вращения при холостом ходу, передаточное отношение должно быть бесконечно большим. Существующие решения с муфтой скольжения или преобразователем крутящего момента при скольжении неэффективно используют много энергии во время каждого запуска.
Вышеописанное также должно иметь место во время и после внезапного изменения положения дроссельной заслонки. (Изменение положения дроссельной заслонки, по существу, представляет собой изменение требуемой мощности двигателя).
Это означает, что данное отношение должно изменяться очень быстро. Предположим, что автомобиль двигается с постоянной средней скоростью при 85% открытия дросселя для оптимального расхода топлива. Двигатель вырабатывает только малую часть имеющейся мощности двигателя. Если требуется ускорение без изменения данного отношения, двигатель может ускориться только за счет приблизительно 15% открытия дросселя, для того, чтобы низкое давление могло возрасти только на 15%. Таким образом, необходимо мгновенное включение понижающей передачи для получения требуемой мощности двигателя: трансмиссия должна мгновенно изменить данное отношение так, чтобы двигатель ускорился до скорости вращения двигателя, при которой он вырабатывает требуемую мощность с оптимальной эффективностью.
Идеальная трансмиссия должна быть безвредной по отношению к окружающей среде, не должна содержать материалов, не поддающихся утилизации, или токсичных материалов или масел.
Идеальная эффективность должна быть 100%, размер, вес и стоимость настолько низкими, насколько возможно, с идеальной надежностью и продолжительностью срока службы.
Ограничения для существующих автомобильных трансмиссий
MT= механическая трансмиссия с сухим сцеплением
AT=автоматическая трансмиссия с преобразователем крутящего момента, по возможности, оснащенная блокирующим устройством
DCT=Двойная муфта со сцеплением, работающим со смазкой, или с сухим сцеплением
CVT-ремень=непрерывно изменяемая трансмиссия с ремнем между двумя коническими шкивами
CVT-тороид=непрерывно изменяемая трансмиссия с половинным и целиковым тороидальными шкивами
HSD=гидростатическая передача. Это гидравлическая система с аксиально-поршневым насосом переменной производительности, приводимым в действие с помощью двигателя, и регулируемым гидравлическим двигателем, приводящим в действие коробку передач или непосредственно колеса. Выходная скорость изменяется от нуля до определенной скорости, и с помощью коммутации клапана направление вращения может измениться на обратное.
(скоростная магистраль)
Большее количество шестерен требует слишком большого смещения и запутывает водителя
Большее количество шестерен приводит к более высокой стоимости
При смещении снижается эффективность. Большее смещение препятствует улучшению расхода топлива
Большее количество шестерен приводит к более высокой стоимости
Большее количество шестерен->большее смещение->большее использование сцепления->больше рассеяния энергии
Необходимо высокое давление в шкиве, что приводит к высоким гидравлическим потерям.
<85%?
приблизительно 70-80%
Заключение:
MT, AT, DCT: несмотря на то, что для улучшения расхода топлива всегда необходимо большее количество шестерен, где-нибудь существует практический предел, в котором дальнейшее улучшение невозможно. Наибольшие величины отношений все еще остаются недостаточно большими для оптимальной экономии топлива.
CVT: низкая эффективность; наибольшее отношение также остается недостаточно большим для оптимальной экономии топлива.
Следовательно, существует необходимость в усовершенствовании коробки передач или трансмиссии, которая устраняет вышеуказанные ограничения и недостатки.
Сущность изобретения
Настоящее изобретение обеспечивает реверсивную переменную трансмиссию, содержащую так называемые планетарные вариаторы, определенные ниже.
Настоящее изобретение обеспечивает планетарный вариатор (13), функционирующий как подсистема для переменных или реверсивных трансмиссий, выполненный с возможностью непрерывного изменения передаточного отношения и характеризующийся тем, что:
он состоит из круглого зубчатого колеса (1), двух или более сателлитов (2), установленных вокруг центрального вала (12), и центрального зубчатого колеса (3) таким образом, чтобы каждый компонент, а именно круглое зубчатое колесо, центральный вал и центральное зубчатое колесо, образовывали зону взаимодействия с другими трансмиссионными компонентами;
круглое зубчатое колесо представляет собой осесимметричное тело вокруг центральной оси с поверхностью вращения трактрисы, причем эта поверхность предпочтительно упрочнена или покрыта для выдерживания тяговых и сжимающих нагрузок;
центральное зубчатое колесо по существу является таким же, как круглое зубчатое колесо, но внутренний и внешний диаметр трактрисы может отличаться от диаметров круглого зубчатого колеса;
сателлиты состоят из сателлитного зубчатого колеса (5) по существу с конической поверхностью вращения, предпочтительно упрочненной или покрытой для передачи тяговых и сжимающих нагрузок, установленного с возможностью свободного вращения вокруг сателлитной вилки (4) посредством радиальных и осевых подшипников или втулок (8), причем виртуальная вершина упомянутого конуса совпадает с пересечением оси центрального вала (9) с осью шарнира сателлита (2);
каждая сателлитная вилка (4) одного планетарного вариатора (13) выполнена с возможностью свободного вращения вокруг шарнирного соединения (8), ось которого перпендикулярна оси центрального вала и параллельна плоскости сателлитного зубчатого колеса, причем каждая сателлитная вилка и каждое сателлитное зубчатое колесо выполнено с возможностью не взаимодействовать друг с другом для всех применимых углов наклона между осью сателлита и осью центрального вала;
круглое зубчатое колесо, сателлиты и центральное зубчатое колесо прижаты друг к другу для того, чтобы поверхности качения находились в контакте друг с другом и чтобы контактные давления были достаточно высокими для передачи требуемого крутящего момента;
центральный вал перемещается аксиально (продольно) с определенной скоростью в зависимости от сжимающей силы и передаваемого крутящего момента для того, чтобы изменять передаточное отношение;
трактриса круглого и центрального зубчатого колеса имеет, для обоих, параметр длины L такой же, как длина от контактной точки при качении сателлитного зубчатого колеса до пересечения оси шарнира с осью центрального вала, где L используется в уравнении трактрисы +/-x+c=L*(cosα+ln|tan(α/2)|), где с произвольная константа и α угол наклона между касательной в контактной точке и осью центрального вала; и
форма поверхностей качения сателлитных зубчатых колес, которые по существу являются коническими, слегка отклоняется от этой теоретической формы выпуклым образом для оптимизации распределения контактного давления.
Настоящее изобретение дополнительно обеспечивает реверсивную переменную трансмиссию, содержащую первичный и вторичный планетарный вариатор согласно данному изобретению, характеризующуюся тем, что
круглое зубчатое колесо (1а) первичного планетарного вариатора (13а) соединено с корпусом (14) для того, чтобы оно не могло вращаться, но могло перемещаться аксиально за счет предварительной нагрузки, прижимающей все контакты качения обоих планетарных вариаторов;
центральные валы обоих планетарных вариаторов комбинированы в один главный вал (12) и соединены с возможностью вращения с трансмиссионным входным валом (11) и с возможностью аксиального перемещения с помощью усилия рулевого управления в обоих направлениях, в то время как входной вал не перемещается аксиально;
центральное зубчатое колесо (3а) первичного планетарного вариатора (13а) подсоединено к круглому зубчатому колесу (3b) вторичного планетарного вариатора (13b) для того, чтобы комбинированное круглое-центральное зубчатое колесо могло вращаться вокруг центральной оси трансмиссии;
центральное зубчатое колесо (3b) вторичного планетарного вариатора (13b) соединено с выходным валом трансмиссии, причем противодействующая сила предварительной нагрузки передается на корпус через осевой подшипник.
Настоящее изобретение дополнительно обеспечивает реверсивную переменную трансмиссию согласно настоящему изобретению, характеризующуюся тем, что
относительные размеры круглого зубчатого колеса, центрального зубчатого колеса и сателлитов выбраны соответственно для применения в автомобиле, с учетом того, что самое высокое отношение скоростей является настолько высоким, что двигатель почти всегда может вырабатывать свою мощность в точке своей наилучшей эффективности, в частности, размерами, относящимися к передаточному отношению, являются: внешний диаметр первичного и вторичного круглого зубчатого колеса, внутренний диаметр первичного и вторичного центрального зубчатого колеса, эффективный диаметр сателлитных зубчатых колес, параметр длины L уравнения трактрисы; полученное передаточное отношение скоростей показанного примера составляет 2,266 (по абсолютной величине), что иллюстрирует типичный для данной концепции диапазон отношений (передаточное отношение скоростей представляет собой выходную скорость, деленную на входную скорость, пренебрегая потерями эффективности);
относительные размеры круглого зубчатого колеса, центрального зубчатого колеса и сателлитов выбраны соответственно для приспособления применения в автомобиле, с учетом того, что самое высокое отношение скоростей заднего хода является достаточно высоким для приведения в движение автомобиля при средней скорости вращения двигателя и низком уровне шума заднего хода, в частности, размерами, относящимися к передаточному отношению заднего хода, являются: внутренний диаметр первичного и вторичного круглого зубчатого колеса, внешний диаметр первичного и вторичного центрального зубчатого колеса, эффективный диаметр сателлитных зубчатых колес, параметр длины L уравнения трактрисы; полученное передаточное отношение скоростей заднего хода показанного примера составляет 0,695, что иллюстрирует типичный для данной концепции диапазон отношений; и
посредством перемещения главного вала трансмиссии передаточное отношение изменяется непрерывно между самым высоким отношением скоростей переднего хода во время остановки и наивысшим передаточным отношением заднего хода.
Настоящее изобретение дополнительно обеспечивает реверсивную переменную трансмиссию согласно данному изобретению, дополнительно характеризующуюся тем, что
нормальная сила на каждом контакте при качении создается одной предварительной нагрузкой, действующей со стороны корпуса на не вращающееся первичное круглое зубчатое колесо, причем противодействующая сила передается посредством одного подшипника от вторичного центрального зубчатого колеса на корпус;
при этом чистые усилия рулевого управления для определения положения главного вала и, таким образом, также для определения передаточного отношения, создаются за счет одной силы в одном из двух направлений и действуют от входного вала до главного вала, вдвоем вращаясь с одной и той же скоростью, причем противодействующая сила передается через подшипник от входного вала к корпусу.
Настоящее изобретение дополнительно обеспечивает реверсивную переменную трансмиссию согласно данному изобретению, дополнительно характеризующуюся тем, что
предварительная нагрузка, как описано выше, создается с помощью одного или более поршня и системы (систем) цилиндров между корпусом и первичным круглым зубчатым колесом и приводится в действие при помощи одного пневматического или гидравлического давления или создается за счет системы предварительной механической нагрузки, причем эта система предварительной механической нагрузки может также быть использована в качестве стояночного тормоза, когда трансмиссия задается при нулевом отношении скоростей;
при этом давление рулевого управления создается гидравлической или пневматической системой поршня и цилиндра, способной функционировать в обоих направлениях, составляющей одно целое с выходным валом и главным валом;
причем гидравлическое или пневматическое давление для создания давления рулевого управления, упомянутое выше, уплотнено между неподвижным корпусом и вращающимся входным валом с помощью поршневых колец или уплотнений, выполненных с возможностью уплотнения частей, вращающихся с различными скоростями вращения.
Настоящее изобретение дополнительно обеспечивает гидравлическую систему, предназначенную для регулирования реверсивной переменной трансмиссии, согласно данному изобретению, в легковом автомобиле, грузовом автомобиле или другом шоссейном или внедорожном транспортном средстве, характеризующуюся тем, что
один насос с приводом от двигателя используется для подачи гидравлического давления и потока;
аккумулятор высокого и низкого давления объединены в систему, в которой текучая среда от аккумулятора низкого давления для повышения давления на поршень (30) предварительной нагрузки и поршень (28) рулевого управления используется в первую очередь по отношению к аккумулятору высокого давления;
аккумулятор высокого давления наполняется насосом в первую очередь по отношению к аккумулятору низкого давления;
клапан, понижающий давление, используется для регулирования предварительной нагрузки и давлений рулевого управления для движения в прямом и обратном направлениях;
по возможности, добавляется предохранительное устройство в виде двух отсечных клапанов в линии предварительной нагрузки, причем один из них переключается посредством давления рулевого управления прямого хода, а другой - давлением рулевого управления заднего хода для обеспечения отвода предварительной нагрузки сразу, как только одно из действующих давлений рулевого управления падает ниже заданного давления смещения; и
упомянутое предохранительное устройство может быть упрощено за счет удаления предохранительного отсечного клапана (37) из гидравлической схемы.
Настоящее изобретение дополнительно обеспечивает программу системы программного обеспечения, предназначенную для регулирования реверсивной переменной трансмиссии, согласно данному изобретению, с помощью гидравлического клапана в легковом автомобиле, грузовом автомобиле или другом шоссейном или внедорожном транспортном средстве, характеризующуюся тем, что
кривая (крутящего момента двигателя как функция скорости вращения двигателя), выражающая минимальный расход топлива для каждого уровня мощности двигателя, сохраняется в памяти контроллеров;
PID-контроллер определяет скорость поршня рулевого управления, присоединенного к главному валу, для получения скорости вращения двигателя, которая равна требуемой скорости вращения двигателя, вычисленной по кривой минимального расхода топлива;
скорость поршня рулевого управления, которая предложена PID-контроллером, может быть уменьшена для того, чтобы оставаться в пределах диапазона микропроскальзывания, с учетом методики вычисления; и
предварительная нагрузка и давление рулевого управления, определяющие угол сателлитов относительно оси главного вала, вычисляются с учетом опубликованной теории продольного и поперечного микропроскальзывания.
Настоящее изобретение дополнительно обеспечивает применение комбинации из одного или более планетарных вариаторов, согласно настоящему изобретению, в различных компоновках переменной трансмиссии, характеризующееся тем, что
каждый элемент взаимодействия планетарного вариатора, а именно круглое зубчатое колесо, центральный вал и центральное зубчатое колесо, может быть соединен с входом, выходом, корпусом трансмиссии, элементом взаимодействия с другим планетарным вариатором или любым другим компонентом трансмиссии, таким, как смещенные шестерни или системы сателлитных шестерен;
или тем, что могут быть выполнены различные компоновки реверсивной переменной трансмиссии, как описано выше; причем под выражением 'реверсивный' в данном документе подразумевается переменная трансмиссия, выходное направление вращения которой относительно входного направления вращения может изменяться непрерывно и отношение скоростей которой определяется даже при низкой и нулевой выходной скорости без элементов (макро-) проскальзывания, которые, например, используются в преобразователе крутящего момента или фрикционных дисковых муфтах.
Настоящее изобретение дополнительно обеспечивает реверсивную переменную трансмиссию согласно данному изобретению, дополнительно характеризующуюся тем, что
внутренняя часть трансмиссии, где контакты при качении являются перемещающимися, заполняется инертным газом или обычным воздухом и разбрызгивающейся жидкостью для охлаждения и смазки, или газообразной средой с туманом холодильного агента;
причем эта упомянутая внутренняя часть изолирована от смазочного масла для подшипников и от наружной части трансмиссии.
Настоящее изобретение дополнительно обеспечивает планетарный вариатор, согласно настоящему изобретению, дополнительно характеризующейся тем, что
поток смазки для подшипников или втулок внутри сателлитов, по возможности, осуществляется посредством замкнутого контура для каждого сателлита, причем масло рециркулирует посредством лопастей внутри сателлитов, откачивая масло, которое далее направляется через подшипники или втулки;
альтернативный поток смазки для подшипников или втулок внутри сателлитов, по возможности, осуществляется посредством объединения этого потока масла в основной поток смазки, содержащий все подшипники входного и выходного вала, при этом данный поток выводится из центрального вала через один из шарниров (в частности, один из шарнирных пальцев), направляется через подшипники сателлитов и оттекает обратно через другой шарнир (или, в частности, другой шарнирный палец) в центральный вал;
причем другая альтернатива состоит в том, что подшипники сателлитов смазываются смазочным материалом или используются комбинированные подшипники, которые не требуют какой-либо смазки.
Настоящее изобретение дополнительно обеспечивает применение трансмиссии, согласно настоящему изобретению, для передачи мощности при переменных скоростях в легковом автомобиле, грузовом автомобиле, автобусе, внедорожном автомобиле, сенокосилке, ветряной турбине, манипуляторе с телескопической стрелой, автопогрузчике или любом другом промышленном применении, в котором требуется передача мощности с переменными скоростями.
Настоящее изобретение дополнительно обеспечивает систему (реверсивной) переменной трансмиссии, содержащую трансмиссию согласно настоящему изобретению, гидравлическую систему согласно настоящему изобретению и программу системы программного обеспечения согласно настоящему изобретению.
Краткое описание чертежей
Перечень ссылочных позиций на чертежах: круглое зубчатое колесо (1), сателлит (2), центральное зубчатое колесо (3), сателлитная вилка (4), сателлитное зубчатое колесо (5), радиальный подшипник (6) для сателлита, нажимной подшипник (7) для сателлита, шарнирный палец (8), центральный вал (9), клапан (10) сброса давления, входной вал (11), главный вал (12), планетарный вариатор (13), корпус (14), осевой подшипник (15) на входе, радиальный подшипник (16) на входе, центрально-круглое зубчатое колесо (17) с втулками, радиальный подшипник (18) на выходе, осевой подшипник (19) на выходе, входная втулка (20), выходная втулка (21), маслораспределительное устройство (22), поршневые кольца (23), манжетные уплотнения (24), уплотнительная трубка (25), цилиндр (26) рулевого управления прямого хода, цилиндр (27) рулевого управления обратного хода, поршень (28) рулевого управления, поршень (29) для предварительной нагрузки, цилиндр (30) для предварительной нагрузки, центровочный штифт (31), лопасти (32) для подачи масла, клапан (33), понижающий давление, для давления рулевого управления переднего хода (pSF с пропорциональным клапаном), клапан (34), понижающий давление, для давления рулевого управления обратного хода (pSR с пропорциональным клапаном), клапан (35), понижающий давление, для нормального давления (pN с пропорциональным клапаном), клапан (36) аварийного отключения для давления рулевого управления переднего хода, клапан (37) аварийного отключения для давления рулевого управления обратного хода, аккумулятор (38) низкого давления, аккумулятор (39) высокого давления, масляный насос (40), выключатель (41) гидравлического насоса, выключатель (42) гидравлической подачи, выключатель (43) гидравлического аккумулятора, датчики (44) давления, усилие (45) рулевого управления, выходной вал (46), устройство (47) передачи крутящего момента (а именно шлицевое соединение), круглая шестерня (48), сателлитная шестерня (49), водило (50) сателлитной шестерни, центральная шестерня (51), предварительная нагрузка (52), усилие (53) рулевого управления, индекс a: первичный планетарный вариатор, индекс b: вторичный планетарный вариатор.
Фиг.1: Схематичный вид круглого или центрального зубчатого колеса (1, 3), взаимодействующего с сателлитами (2). L представляет собой длину от вершины конусов качения до точки контакта при качении. Фиг.1а изображает два конуса, катящихся один по другому. Только в том случае, когда вершины обоих конусов совпадают, конусы могут катиться один по другому (с фиксированными положениями осей) посредством чистого качения без проскальзывания. Фиг.1b представляет собой сечение круглого или центрального зубчатого колеса и касательную в различных точках на кривой. Для лучшей наглядности, на фиг.1с в этих трех точках добавлены сателлиты. Следует отметить, что L является постоянной величиной.
Фиг.2: Схематичный вид планетарного вариатора, содержащего сателлит (2), соединенный с главным валом (9). Сателлит (2) перекатывается по круглому зубчатому колесу (1) и центральному зубчатому колесу (3), приводя во вращение центральное зубчатое колесо (3) с определенной выходной скоростью. Изменение наклона оси сателлита (2) относительно центрального вала (9) изменяет выходную скорость взаимодействующего центрального зубчатого колеса (3) при постоянной скорости главного вала (9). Сателлитная вилка (4), сателлитное зубчатое колесо (5), радиальный подшипник (6) сателлита, нажимной подшипник (7) для сателлита, (8) шарнирный палец, (9) центральный вал, (10) клапан сброса давления.
Фиг.3: Схематичный вид реверсивной переменной трансмиссии настоящего изобретения. Фиг.3а и 3b представляют собой увеличенный вид первого и второго планетарного вариатора, соответственно, в их положении в трансмиссии. Следует отметить, что второе центральное зубчатое колесо (3) вращается с переменной скоростью вращения вокруг оси трансмиссии в зависимости от положения планетарных вариаторов в продольном направлении коробки передач, тем самым изменяя оси сателлитов относительно главного вала и, следовательно, взаимодействие с круглым зубчатым колесом (1а) и (1b) и центральным зубчатым колесом (3а) и (3b).
Фиг.4: Схематичный вид сателлитов и их соединение с главным валом трансмиссии.
Фиг.5: Схематичный вид гидравлической схемы.
Фиг.6: Схематичный вид альтернативного варианта реверсивной переменной трансмиссии.
Фиг.7: Схематичный вид другого альтернативного варианта реверсивной переменной трансмиссии.
Фиг.8: Схематичный вид другого альтернативного варианта реверсивной переменной трансмиссии.
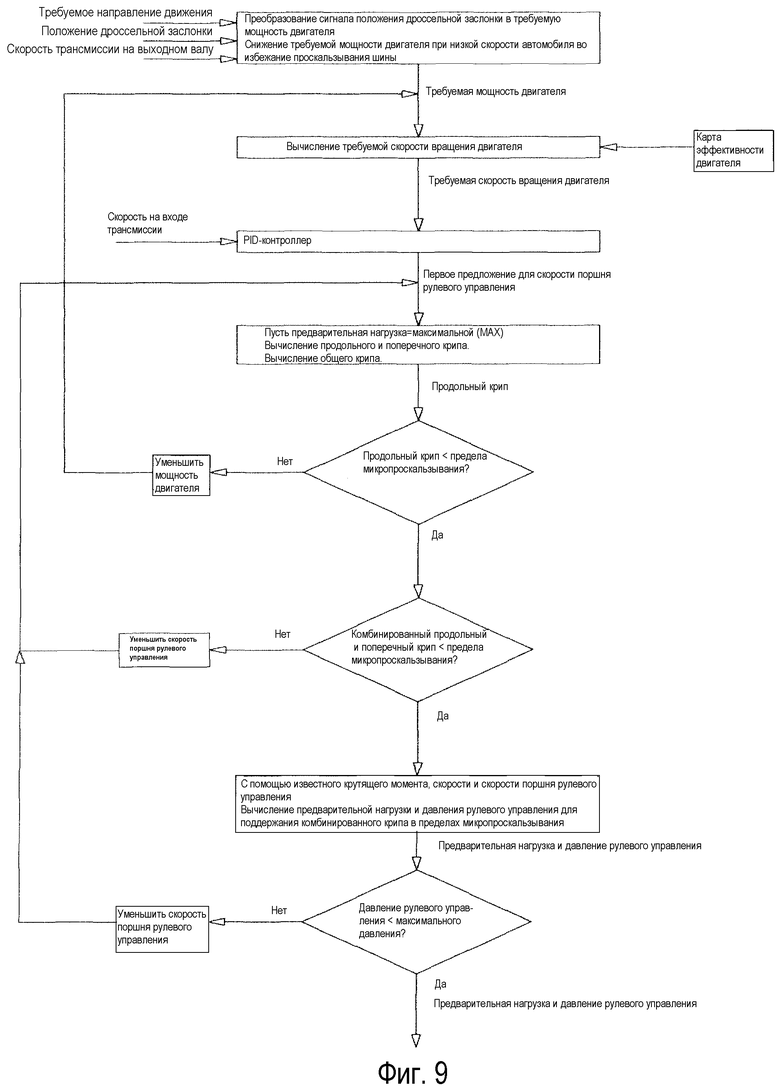
Фиг.9: Программная блок-схема системы программного обеспечения, необходимой для управления коробкой передач.
Фиг.10: Схема предшествующего уровня техники обычного расхода топлива дизельного двигателя и обычной коробки передач, заимствованная из Brandstetter и Howard 1989: удельный расход топлива для дизельного двигателя D1 объемом 2,5 литра компании Ford (Brandstetter and Howard 1989: specific fuel consumption for the Ford 2,5 litre D1 Diesel engine).
Фиг.11: Результаты моделирования разгона при полностью открытой дроссельной заслонке из состояния покоя.
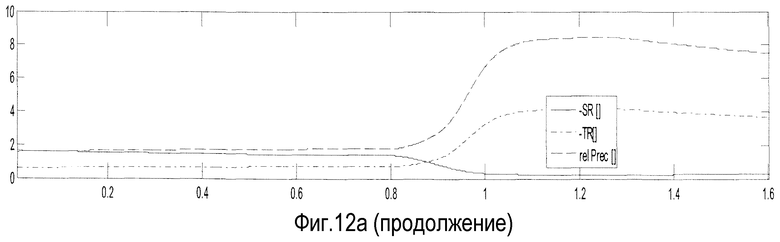
Фиг.12: Результаты моделирования движения с постоянной скоростью 50 км/ч и затем внезапного ускорения при полностью открытой дроссельной заслонке.
Фиг.13: Трехмерный вид возможного осуществления сателлитной вилки.
Подробное описание предпочтительных вариантов осуществления изобретения
Трансмиссию согласно настоящему изобретению лучше всего можно сравнить с тороидальной трансмиссией. Частично и полностью тороидальная трансмиссия имеет недостатки в том, что общая протяженность ограничена. Также требуется преобразователь крутящего момента или другое устройство для разгона и устройство смещения и шестерни для реверса направления движения. Основной недостаток состоит в том, что сателлитные зубчатые колеса и шкивы перекатываются друг по другу посредством винтового движения, которое означает, что контакты при качении приводятся, из-за их геометрии, к макропроскальзыванию, при передаче движущих сил. Следовательно, эти контакты при качении должны быть смазанными для уменьшения изнашивания и рассеивания тепла. Смазанные поверхности имеют низкий коэффициент трения. Для передачи движущих сил посредством контактных поверхностей, эти поверхности должны быть прижаты друг к другу с большими усилиями так, что требуется сложное исполнение. Другим следствием макропроскальзывания конечно является низкая эффективность трансмиссии.
Описание элементов
Согласно настоящему изобретению трансмиссия, главным образом, состоит из двух так называемых планетарных вариаторов. Планетарный вариатор представляет собой механическую подсистему, сравнимую с системой планетарной передачи, но с изменяемым передаточным отношением и с поверхностями качения вместо шестерен. Планетарный вариатор выполнен таким образом, чтобы в контактах при качении возникало чистое качение без проскальзывающего движения. В применении трансмиссии настоящего изобретения, контактное давление контактов при качении регулируется так, чтобы контактные напряжения оставались в допустимых пределах и чтобы контактное давление было достаточно высоким, чтобы избежать макроскольжение.
В литературе макроскольжение описывается как условие для двух поверхностей качения, подвергающихся действию нормальной силы и передающих тангенциальную силу (касательно к поверхности) таким образом, что в зоне контакта существует подобласть, в которой две поверхности слипаются. Вне этой подобласти, но еще в пределах зоны контакта, возникает крип из-за эластичной деформации тел.
Макроскольжение представляет собой условие, при котором отсутствует подобласть с контактом прилипания. При условии макроскольжения величина проскальзывания является неконтролируемой.
Планетарный вариатор
Подсистема планетарного вариатора (см. фиг.2) состоит из следующих частей:
- круглое зубчатое колесо (1)
- сателлиты (2)
- сателлитная вилка (4)
- сателлитное зубчатое колесо (5)
- радиальный подшипники (6)
- нажимной подшипник (7)
- шарнирные пальцы (8)
- центральный вал (9)
- центральное зубчатое колесо (3)
Круглое зубчатое колесо (1), центральное зубчатое колесо (3) и центральный вал (9) имеют общую ось вращения. Круглое зубчатое колесо (1) аксиально прижато к двум или более сателлитам (2) посредством предварительной нагрузки (52). Сателлитные колеса (5) могут свободно вращаться вокруг вилки (4) с помощью радиальных подшипников (6). Центробежные силы и силы, возникающие в результате предварительной нагрузки (52), передаются посредством нажимного подшипника (7) на сателлитную вилку (4). Каждая сателлитная вилка (4) может свободно вращаться вокруг шарнирных пальцев (8) в плоскости, образованной центральным валом (9) и сателлитной вилкой (4). Ось шарнира каждого сателлита (2) пересекает центральный вал (9) в одной и той же точке. Сателлитные колеса (5) прижимаются к центральному зубчатому колесу (3), что приводит к возникновению противодействующей силы для предварительной нагрузки (52).
Посредством изменения относительного положения шарнира относительно колес, изменяется передаточное отношение. При изменении данного отношения трансверсальная контактная скорость и контактное давление должно регулироваться для удерживания поперечного и продольного крипа в области макропроскальзывания.
Круглое зубчатое колесо (1) и центральное зубчатое колесо (3)
Действующая контактная поверхность как круглого, так и центрального зубчатого колеса (1, 3) с сателлитами (2) является осесимметричной поверхностью конкретной формы.
Для получения качения без скольжения двух тел (сателлита и круглого зубчатого колеса, сателлита и центрального зубчатого колеса) их оси вращения и касательная к их контактным поверхностям должны пересекаться, все три, в одной точке. См. фиг.1а: вершина двух конусов совпадает. Если одна точка контактной поверхности катится без скольжения одна по другой, то все точки функционируют, и не возникает винтовое движение.
Кривая как центрального, так и круглого зубчатого колеса, представляющая качение без проскальзывания, может быть построена согласно их свойствам в плоскости xy: любая касательная к кривой должна пересекать центральную ось x так, чтобы расстояние от этого пересечения с осью x до точки касательной было постоянным L. Точка пересечения с осью является положением шарниров. Тогда кривая определяется с помощью следующего набора интегральных уравнений:
L sinα=y
α=arctan(dy/dx),
где x - горизонтальная ось, представляющая ось вращения,
ось y перпендикулярна оси x,
L - длина от шарнира до точки контакта при качении,
α - угол касательной с осью x.
После интегрирования:
+/-x+c=√(L2-y2)-L/2*ln((L+√(L2-y2))/(L-√(L2-y2))
или
+/-x+c=L*(cosα-1/2*ln((1+cos α)/(1-cos α)))
+/-x+c=L*(cosα+ln[tan(α/2)]),
где с - произвольная константа интегрирования.
Посредством ограничения для y и α
0<=y<=L
0°<=α<=90°
может быть построена поверхность вращения вокруг оси x. Эта поверхность показана на фиг.1b: касательная в трех случайных точках на кривой пересекает ось x с длиной L от точки касания до пересечения с осью x. На фиг.1с в этих трех точках добавлены сателлиты. Расстояние точки контакта сателлита до ее шарнира также составляет L так, что условия чистого качения выполняются для всех положений шарнира вдоль оси x. В математике эта кривая известна как трактриса и впервые описана Кристианом Гюйгенсом и Клодом Перро в 1693 году. Обычно эта кривая формулируется в дифференциальном математическом выражении, но вышеприведенная формула является более практичной для применения в этой трансмиссии.
На практике, данная поверхность может слегка отклоняться от теоретической поверхности, чтобы компенсировать сжатие или износ поверхности. Материал контактной поверхности, жесткость, шероховатость, состояние, покрытие и смазочная текучая среда или газообразная среда выбраны для оптимизации силы тяги и износа. Такие композиции хорошо известны в уровне техники в технологии профиля зубчатой передачи и инструмента для механической обработки.
Круглое зубчатое колесо (1) и центральное зубчатое колесо (3) имеют особенности для обеспечения или недопущения вращения, для обеспечения или недопущения аксиального перемещения и перемещения к центру компонента, в зависимости от их функции в трансмиссии и типа трансмиссии. Некоторые не ограничивающие примеры различных конфигураций круглое зубчатое колесо - сателлит - центральное зубчатое колесо изображены на фиг.3 и фиг.6-8. В этих вариантах осуществления первое круглое зубчатое колесо не может вращаться, в то время как в альтернативных вариантах осуществления круглое зубчатое колесо может вращаться, при этом сателлиты, перекатывающиеся на круглом зубчатом колесе, фиксированы. В альтернативных вариантах осуществления, как круглое зубчатое колесо, так и сателлиты могут вращаться независимо друг от друга, например, с разными скоростями. По существу, возможна любая конфигурация при условии соблюдения концепции осесимметричных контактных поверхностей сателлитов с круглыми и центральными зубчатыми колесами, как отмечено выше.
Используемые материалы
В предпочтительном варианте осуществления вращающиеся компоненты (сателлиты и зубчатые колеса) выполнены из стали или закаленной стали, корпус трансмиссии может, например, быть из алюминия и крышка с лопастями может, например, состоять из алюминия или пластиков. Могут использоваться любые другие пригодные материалы, известные в уровне техники, выполненные с возможностью обеспечения необходимой жесткости материала, требований к тяге и сопротивления износу.
Покрытие поверхности взаимодействия сателлитов и зубчатых колес может, например, состоять из AlTiN (титано-алюминиевый нитрид), TiCN (карботитановый нитрид), TiN (нитрид титана) или TiCrN (нитрид титана-хрома). Может использоваться любой другой подходящий материал, известный в уровне техники, выполненный с возможностью обеспечения необходимой жесткости материала, требований к тяге и сопротивления износу.
Сателлиты (2)
Планетарный вариатор имеет два или более сателлитов (2) для трансмиссии движущих сил. В предпочтительном варианте осуществления имеются по три сателлита на планетарный вариатор, как изображено на фиг.4. Касательная к поверхности качения пересекает центр шарнира. Расстояние от точки контакта при качении до шарнира равно L: это та же самая длина L, как и в формуле для поверхности зубчатого колеса.
(i) Сателлитное колесо (5)
Поверхность качения сателлитного зубчатого колеса (5) является корончатой, чтобы избежать высоких краевых контактных напряжений. Подобно поверхности круглого и центрального зубчатого колеса, материал контактной поверхности, жесткость, шероховатость, состояние и покрытие оптимизированы с учетом силы тяги и износа.
(ii) Сателлитная вилка (4) и шарнирный палец (8)
Сателлитная вилка (4) и шарнирный палец (8) выполнены достаточно прочными, чтобы выдерживать центробежные силы, предварительную нагрузку (52) и крутящие моменты. С другой стороны, вилки (4) могут не взаимодействовать друг с другом при всех углах наклона сателлитов (2). Исполнение вилок показано на фиг.2, 3 и 4. Трехмерный вид изображен на фиг.13. Все три вилки одного планетарного вариатора являются одинаковыми. Две ножки вилки (4) представляют собой зеркальное отражение друг друга относительно центральной оси вилки (4).
(iii) Подшипники и смазка
Подшипники (6, 7) могут быть или подшипниками качения или подшипниками скольжения. Поток масла для охлаждения и смазки подшипников осуществляется посредством лопаток в сателлитном колесе (5). Сателлитные колеса (5) всегда вращаются при функционировании двигателя. Капан (10) сброса давления открывается при скорости вращения ниже скорости вращения холостого хода под действием центробежных сил и закрывается посредством силы, создаваемой пружиной, до того, как двигатель приходит в состояние покоя. Этот клапан позволяет термическое расширение масла без повышения давления. Во время остановки он должен предотвратить загрязнение зоны контактов маслом из сателлитов (2), которое будет требоваться, в целом, далее, или избежать отсутствия смазки. Разумеется, возможны альтернативные системы смазки. Также возможно использование гибридных подшипников качения без смазки.
Применения планетарного вариатора
Планетарный вариатор, подобно системе планетарной передачи, имеет три элемента взаимодействия, которые могут быть входом, выходом, соединением с корпусом, соединением с другим планетарным вариатором или соединением с другими компонентами трансмиссии такими, как планетарный ряд или смещенная зубчатая передача. Посредством одного или более планетарных вариаторов, по возможности комбинированных с другими компонентами трансмиссии (такими как планетарный ряд или смещенная передача), могут быть созданы различные компоновки переменной трансмиссии.
Реверсивная переменная трансмиссия
Общая компоновка
Комбинация двух планетарных вариаторов, как описано ниже и показано на фиг.3 и 4, представляет собой один из множества способов для получения реверсивной трансмиссии. Под термином 'реверсивный' подразумевается трансмиссия, которая может изменить направление вращения на выходе непрерывно изменяемым образом и, таким образом, обходя нулевое отношение скоростей.
Двигатель, непосредственно или через систему гашения скручивания, подсоединен к входному валу (11) трансмиссии. Этот вал соединен с центральным валом (9а) первичного планетарного вариатора (13а) таким образом, что оба вала не могут вращаться друг относительно друга. Этот центральный вал (9а) может скользить аксиально относительно входного вала (11). Центральные валы (9а, 9b) первичного (13а) и вторичного планетарного вариатора (13b) комбинированы в один трансмиссионный главный вал (12).
Круглое зубчатое колесо первичного планетарного вариатора (1а) прикреплено к корпусу (14) с помощью двух или более центровочных штифтов (31) для того, чтобы оно не могло вращаться, но могло только перемещаться аксиально. Оно прижато к сателлитам (2а) первичного планетарного вариатора посредством регулируемого гидравлического давления pN. Круглое зубчатое колесо (1а) аксиально перемещается при изменении передаточного отношения.
Вместо фиксированных центровочных штифтов (31) гаситель крутильных колебаний может быть выполнен как одно целое посредством замены центровочных штифтов (31) эластичными элементами, такими как пружины и демпфирующие элементы, действующие в тангенциальном направлении и установленные между корпусом (14) и первичным круглым зубчатым колесом (1а). Кроме того, эти эластичные элементы должны допускать тангенциальное перемещение первичного круглого зубчатого колеса (1а) с высокой жесткостью и аксиальное перемещение первичного круглого зубчатого колеса (1а) с гораздо меньшей жесткостью.
Центральное зубчатое колесо (3а) первичного планетарного вариатора подсоединено, как одно целое, к круглому зубчатому колесу (1b) вторичного планетарного вариатора. Это комбинированное центрально-круглое зубчатое колесо (3а, 1b) центрировано посредством сателлитов первичного и вторичного планетарного вариатора (2а, 2b) без использования подшипника для центрирования. Однако во избежание вибраций длинного входного вала или для создания режима 'нейтраль' (см.4.6.1), радиальные втулки или подшипники (17) могут быть добавлены между центрально-круглым зубчатым колесом (3а, 1b) и главным валом (12). Центрально-круглое зубчатое колесо (3а, 1b) перемещается аксиально при изменении отношения.
Сателлиты (2b) вторичного планетарного вариатора также соединены с главным валом (12).
Центральное зубчатое колесо (3b) вторичного планетарного вариатора является выходом трансмиссии. Оно аксиально и радиально размещено посредством подшипников (18, 19). Эти подшипники (18, 19) выбраны для передачи предварительной нагрузки (52) и усилия (53) рулевого управления, центробежных сил и гироскопических сил, действующих на сателлиты (2а, 2b).
Область применения
Эта трансмиссия сконструирована для пассажирских автомобилей, но ее применение может быть распространено на:
- машины для грузовых перевозок: где требуется множество отношений, низкие и высокие отношения, вместе с высокой эффективностью;
- внедорожные средства:
- применения, в которых ползучая скорость и хорошая эффективность при низкой скорости вращения является важной, такие как большие сенокосилки;
- подъемно-транспортные тележки, которые нуждаются в плавной маневроспособности при низкой скорости вращения как в обоих направлениях движения, так и в относительно быстром реверсе (сравнимом со второй передней передачей);
- технику, подобную манипуляторам с телескопической штангой, где низкая скорость вращения должна быть регулируемой независимо от изменения сопротивления грунта;
- ветряные двигатели, в которых "выход" трансмиссии подсоединен к очень медленному вращательному движителю, а "вход" приводит в действие генератор;
- другие промышленные применения, в которых мощность должна передаваться с переменными скоростями.
ПРИМЕРЫ
Настоящее изобретение иллюстрировано посредством следующих не ограничивающих примеров.
Пример 1: Элементы примера трансмиссии согласно настоящему изобретению
Входной вал (11) поддерживается подшипником (15) и подшипником (16). Подшипник (15) выдерживает результирующие аксиальные силы, вызванные центробежными, гироскопическими силами, силами поперечного крипа и силами трения скольжения. Подшипники (15, 16) вмещены в маслораспределитель (22), который соединен болтами к корпусу (14). Входной вал, проходящий от двигателя, соединен с главным валом трансмиссии посредством элемента шпоночного вала, позволяя поступательное аксиальное перемещение, но не вращательное друг относительно друга. Таким образом, крутящий момент передается посредством длинной внутренней шпонки от входного вала (11) на внешние шпонки главного вала (12). Вместо шпонки, возможны альтернативы, которые передают крутящий момент и позволяют аксиальное перемещение (в продольном направлении вала). Главный вал (12) центрирован с помощью втулки (20) внутри входного вала (11) и другой втулки (21) в центральном зубчатом колесе (3b) вторичного планетарного вариатора. Эти втулки (20, 21) не нагружаются радиальными силами, но должны центрировать главный вал (12) и позволяют аксиальное перемещение. Первая втулка (20) разделена для обеспечения установки над шпонками. Центральное зубчатое колесо (3b) вторичного планетарного вариатора опирается на два подшипника (18, 19). Один из них воспринимает аксиальные нагрузки.
Смазочное масло для подшипников (15, 16, 18, 19) и втулок (20, 21) подается от корпуса (14) через отверстия к маслораспределительному устройству (22) посредством подшипника (15) и подшипника (16), затем поток разделяется. Одна часть проходит через втулку (20) и шпонки и, затем, через центральное отверстие в главном валу (12). Другая часть обходит эти компоненты через посредство отверстия и соединяется с первым потоком масла в центральном отверстии. На конце главного вала (12) поток смазки проходит через втулку (21) и два подшипника (18, 19) центрального зубчатого колеса. Масло течет обратно через отверстие в корпусе (14) к маслосборнику.
Смазка подшипников (6а, 6b, 7a, 7b) каждого сателлита показана в виде замкнутого контура, но, в качестве альтернативы, она может быть введена в контур смазки посредством потока масла через каналы внутри шарнирных пальцев (8а, 8b). Эта альтернатива может требовать уплотнения между шарнирными пальцами (8а, 8b) и сателлитной вилкой (4a, 4b). В исполнении замкнутого контура поток создается посредством лопастей (32) внутри сателлитного колеса (5), откачивающих масло наружу. При вращении входного вала, сателлиты (2) также вращаются вокруг своей оси и, таким образом, масло циркулирует через подшипники (6 и 7). Конструктивное исполнение смазки предполагает, что смазочная текучая среда или газовая среда контактов при качении должна смешиваться со смазочным маслом подшипников. По этой причине внутренняя часть трансмиссии с контактами при качении полностью изолирована от смазочного масла для подшипников и, конечно, уплотнена снаружи.
Корпус (14) и маслораспределительное устройство (22) содержит также два или более отверстий для давлений рулевого управления pSF и pSR. Эти давления обеспечены уплотнением посредством трех поршневых колец (23) между маслораспределительным устройством (22) и вращающимся входным валом (11). Протекающее масло из-за давления рулевого управления посредством поршневых колец (23) собирается в контуре смазки. Контур смазки полностью уплотнен по отношению к наружной части трансмиссии и к зоне поверхностей качения посредством манжетных уплотнений (24). Посредством уплотнительной трубки (25) давления рулевого управления pSF и pSR уплотняются и управляются по отношению к цилиндру (26) рулевого управления прямого хода и цилиндру (27) рулевого управления обратного хода, соответственно.
Втулка (17) выполнена из материала для работы без смазки или работы в газовой среде или текучей среде для контактов при качении. При нормальной работе эта втулка (17) не контактирует с главным валом (12). См. раздел 4.6.1.
Трансмиссионная концепция согласно настоящему изобретению имеет следующие преимущества:
Требуется только одна система поршня и цилиндра (29, 30) для создания предварительной нагрузки (52), которая прижимает все контактные поверхности друг к другу. Этот цилиндр (30) является не вращающимся, что делает гидравлическую (или пневматическую) подачу легкой, поскольку не требуются динамические уплотнения.
Цилиндр (26, 27) рулевого управления вращается с такой же скоростью, как главный вал (12). Иначе говоря, были бы необходимы большие подшипники, работающие в обоих аксиальных направлениях. Уплотнения поршня (28) рулевого управления перемещаются только аксиально и не перемещаются тангенциально. Относительное вращение было бы невозможно при этих больших диаметрах и высоких скоростях вращения двигателя. В изображенной компоновке на фиг.3 необходим только один поршень (28) рулевого управления, действующий в обоих аксиальных направлениях, для перемещения центральных валов (9) обоих планетарных вариаторов.
С помощью комбинирования двух планетарных вариаторов, как показано на фиг.3, передаточное отношение каждого планетарного вариатора увеличивается таким образом, что получается очень длинное передаточное отношение повышающей передачи в направлении движения вперед. Другое преимущество состоит в том, что в направлении обратного движения также достигается передаточное число, обеспечивающее более высокую скорость трансмиссии, что предотвращает высокую скорость вращения двигателя при движении задним ходом.
Длинное отношение крутящих моментов (0,441) позволяет автомобилю ехать при любой скорости и любом уровне мощности с оптимальной эффективностью двигателя. Это будет снижать расход топлива двигателя от 15 до 20% (см. также график функционирования двигателя на фиг.10). Современные двигатели вырабатывают высокую мощность при низкой скорости вращения двигателя. 25 л.с. (достаточно для езды с постоянной скоростью около 110-120 км/ч) вырабатывается с оптимальной эффективностью близко к скорости вращения двигателя от 1300 об/мин.
Целью устройств управления для этой трансмиссионной концепции является создание двигателя, работающего всегда при его оптимальной эффективности. Это означает, что при средней мощности двигателя двигатель работает при очень низкой скорости вращения. Однако, для водителя это условие может быть приемлемо, если можно очень быстро изменить отношение, когда водитель внезапно нажал педаль управления дроссельной заслонкой. Изменение отношения означает, что сателлитные зубчатые колеса (5) должны осуществлять поперечное перемещение (=перпендикулярно к направлению качения) по круглому зубчатого колесу (1) и центральному зубчатому колесу (3). Это не составляет проблемы, поскольку поперечное расстояние, которое нужно преодолеть для данного изменения отношения, настолько мало по отношению к продольному расстоянию в направлении качения, что это поперечное перемещение может быть выполнено достаточно быстро, пока контакты при качении остаются в условии микроскольжения.
Отношение крутящих моментов изменяется непрерывно от -1,44 (задний ход) через бесконечность до +0,441 (прямой ход). Таким образом, нет необходимости в устройстве для разгона. Во время разгона никакая энергия не рассеивается в муфте скольжения или преобразователе крутящего момента. Отсутствие этой диссипации тепла снижает расход топлива от 0,1 до 0,12 литров/100 км. Конечно, в отсутствие главной муфты или преобразователя крутящего момента, также имеется экономия по цене и весу. Таким образом, отношение крутящих моментов изменяется непрерывно до бесконечности, хотя максимальный выходной крутящий момент ограничен крутящим моментом, соответствующим пределу по проскальзыванию шины автомобиля на сухой поверхности. Легко выразить данное отношение в терминах отношения скоростей (=выходная скорость, деленная на входную скорость). Тогда отношение скоростей непрерывно меняется от -0,695 для заднего хода через ноль до +2,268 при наивысшей передаче прямого хода.
Для максимального ускорения из состояния покоя с помощью устройства разгона (преобразователя крутящего момента или муфты), двигатель должен быть доведен до скорости вращения, при которой он вырабатывает максимальный крутящий момент (или крутящий момент, необходимый для достижения фазы, близкой к скольжению шин). На ускорение двигателя требуется время. В течение этого времени на колесах не достигается максимальная движущая сила. Посредством переменной трансмиссии с отношением скоростей, изменяющимся от нуля, как изложено выше, достигается максимальная движущая сила, как и в случае скорости вращения холостого хода. Таким образом, эта максимальная движущая сила также достигается, как и в случае самого начала нажатия педали управления дроссельной заслонкой. Моделирование, приведенное ниже, показывает, что данная трансмиссия выполнена с возможностью увеличения скорости вращения двигателя достаточно быстро для непрерывного поддержания максимальной движущей силы вплоть до точки, в которой двигатель достигает своей максимальной мощности (с этого момента скорости вращения двигателя остаются постоянными до тех пор, пока педаль управления дроссельной заслонкой полностью нажата до уровня пола).
Таким образом, данная трансмиссия может также оставаться во время остановки и приводить в движение очень медленно (вперед или назад) - без какого-либо скользящего компонента. Эффективность также остается высокой при очень низкой скорости. Приведение в движение при таких низких отношениях почти не зависит от крутизны, подъема или спуска (очень полезно во время парковки на склоне или, например, у бордюрного камня). Это очень низкое отношение скоростей также является практичным при разгоне на скользких или занесенных снегом поверхностях. В обычном автомобиле с муфтой скольжения ведомые колеса регулируются по крутящему моменту. Когда сцепление шины с дорогой падает ниже движущей силы, колеса ускоряются неуправляемо до тех пор, пока муфта не закроется. В снежных или глинистых условиях шины прокручиваются в углублении так, что автомобиль может завязнуть. При помощи трансмиссии настоящего изобретения колеса регулируются по скорости и могут вращаться при данной очень низкой скорости. Когда сцепление шины с дорогой падает, колеса остаются вращающимися с той же низкой скоростью для того, чтобы шины могли восстановить сцепление с дорогой. Эта способность также очень полезна для внедорожных автомобилей или полноприводных автомобилей.
Моделированная эффективность трансмиссии, как таковая, соответствует низкому уровню мощности около 99,4%. Эта величина включает в себя механические и гидравлические потери. При разгоне при полностью открытой дроссельной заслонке, она снижается до 96-97%. Существующие коробки передач имеют наивысшую эффективность при максимальном крутящем моменте, ситуация, которая случается редко в современных автомобилях высокой мощности. Оказывается, трансмиссия настоящего изобретения имеет самую высокую эффективность при низкой мощности и нулевом или медленном изменении отношения. Такие условия приведения в движение вносят наибольший вклад в общий расход топлива.
Следствие высокой эффективности состоит в том, что не требуется никакая охлаждающая система или что используется только малая система охлаждения в редких случаях. Насос, охладитель, вентилятор, хладагент и гидравлические регуляторы только увеличивают стоимость и вес и повышают риск от сброса масла в окружающую среду. Кроме того, мощность для приведения в действие насоса охладителя дополнительно снижает эффективность.
Моделирование показывает, что передаточное отношение может изменяться настолько быстро (когда педаль управления дроссельной заслонкой нажимается внезапно), что при ускорении самого двигателя расходуется полный крутящий момент двигателя. Более быстрое изменение отношения, конечно, не имеет смысла. Это означает, что мощность двигателя возрастает почти от нуля до полной мощности за 200 мс (моделирования выполнены для бензинового двигателя при 300 л.с., 400 Нм, в случае пассажирского автомобиля с приводом на задние колеса в 1800 кг).
В итоге полное повышение эффективности составляет около 18-30%:
- 15-20% от улучшенной эффективности двигателя,
- 2-7% от эффективности трансмиссии согласно настоящему изобретению по сравнению с механической трансмиссией (MT),
- 1-3% при отсутствии муфты или преобразователя крутящего момента.
Стояночный тормоз может быть легко выполнен, когда передаточное отношение установлено на ноль (таким образом, выход поддерживается на одном уровне до тех пор, пока двигатель может вращаться без подачи мощности). Когда применяется механическое устройство в качестве предварительной нагрузки (52), эта нагрузка также будет поддерживаться, когда двигатель выключен. Таким образом, выход трансмиссии не может вращаться, независимо от того, работает двигатель или нет.
Фиг.11 иллюстрирует моделирование разгона из состояния покоя.
На фиг.12 показано моделирование внезапного ускорения после движения с постоянной скоростью 50 км/ч. Это показывает, как быстро достигается ускорение автомобиля.
Пример 2: Гидравлические регуляторы
Фиг.5 изображает гидравлический способ создания предварительной нагрузки и усилия рулевого управления, хотя эти усилия также могут быть созданы с помощью пневматических или механических средств.
Гидравлическое регулируемое давление действует на поршень (29) предварительной нагрузки круглого зубчатого колеса (1а) первичного планетарного вариатора для создания нормальных сил между сателлитами (2а, 2b) и круглым и центральным зубчатыми колесами (1a, 1b, 3a, 3b). Поршень (29) предварительной нагрузки и цилиндр (30) предварительной нагрузки не вращаются. Нормальная сила на каждой контактной поверхности должна быть достаточно большой так, чтобы продольное и поперечное проскальзывание в зонах контакта оставалось в условии микропроскальзывания. Постоянное намного большее давление, чем необходимо, может укорачивать срок службы подшипников и контактных поверхностей.
Данное отношение регулируется с помощью давления рулевого управления переднего хода pSF, действующего на поршень (28) рулевого управления в рулевом цилиндре (26) прямого хода и с помощью давления рулевого управления заднего хода pSR, действующего на другую сторону поршня (28) рулевого управления в рулевом цилиндре (27) заднего хода. Поршень (28) рулевого управления и рулевые цилиндры (26, 27) вращаются с входной скоростью. При отсутствии давления рулевого управления передаточное отношение переходило бы к нулевому отношению скорости, поскольку центробежные силы на сателлитах (2а, 2b) подтягивают главный вал (12) в положение с нулевым отношением скоростей. Чисто усилие рулевого управления регулируется системой программного обеспечения. Быстрое включение понижающей передачи (при движении вперед) не требует в большинстве случаев гидравлической мощности от давления рулевого управления, поскольку центробежные силы на сателлитах (2а, 2b) обычно уже достаточно сильные для смещения вниз только за счет убывающего давления рулевого управления переднего хода pSF. Когда центробежные силы являются недостаточными, быстрое включение понижающей передачи выполняется посредством давления рулевого управления заднего хода pSR.
Пример 3: Регуляторы системы программного обеспечения
Программа системы программного обеспечения описывается на примере применения в двигателе внутреннего сгорания.
Обычно система программного обеспечения (далее - SW) должна регулировать предварительную нагрузку и давления рулевого управления pSF и pSR. В целях безопасности и возможности управления, ни одна из сторон поршня (28) рулевого управления никогда не испытывает нулевое давление, но всегда испытывает минимальное давление смещения на одной стороне (см. 4.6.1).
Входными данными для SW являются положения дроссельной заслонки, требуемое направление движения, входная скорость, выходная скорость и крутящий момент двигателя и карта эффективности. Возможно, положение поршня рулевого управления будет использоваться в качестве сигнала обратной связи.
Требуемый уровень мощности двигателя известен из положения дроссельной заслонки. Это определяет посредством карты эффективности требуемую скорость вращения двигателя. С помощью пропорционально-интегрального контроллера с предварением (далее - PID-контроллер) (или PID2) SW определяет первое предложение для скорости поршня (28) рулевого управления с тем, чтобы скорость вращения двигателя изменялась до требуемой скорости вращения двигателя. Более подробно, трансмиссионный компьютер вычисляет предварительную нагрузку и усилие рулевого управления за пять этапов для того, чтобы предотвратить возможность возникновения макроскольжения в одном из контактов при качении и чтобы избежать того, что противобуксовочная система автомобиля может вмешиваться в управление слишком часто.
Этап 1:
При низкой скорости автомобиля требуемая мощность будет ограничиваться известной величиной сцепления шины с дорогой на сухом бетонном покрытии. Требуемая скорость вращения двигателя и крутящий момент вычисляются посредством требуемой мощности двигателя и с помощью карты эффективности использования топлива двигателя. Затем PID-контроллер определяет скорость vS поршня (28) рулевого управления. Далее вычисляются все геометрические параметры и все внутренние скорости (продольные и поперечные к направлению качения).
Этап 2:
Предположим, что предварительная нагрузка pN является максимальной.
Продольный крип вычисляется с помощью теории микропроскальзывания. Если все продольные крипы находятся в условии микропроскальзывания, контроллер переходит к следующему этапу; если нет, входной крутящий момент должен быть уменьшен (последнее не должно возникать, поскольку это означает, что трансмиссия обладает недостаточным запасом прочности).
Этап 3:
Скорость vS поршня рулевого управления уже вычислена контроллером; предполагается, что предварительная нагрузка pN является максимальной.
С использованием известного действующего крутящего момента и входной скорости, продольные силы в точках контакта известны. Скорость vS рулевого управления также определяет все поперечные скорости в контактах при качении. Продольное микропроскальзывание определяется с помощью теории микропроскальзывания, с использованием известных нормальных сил и посредством поперечных скоростей. Поперечный крип также определяется из теории микропроскальзывания. Оба крипа определяют общий крип.
Если общий крип находится в пределах микропроскальзывания, контроллер переходит к следующему этапу; если нет, скорость vS рулевого управления должна быть уменьшена до новой скорости vS рулевого управления.
Этап 4:
С помощью действующего предложения относительно скорости vS рулевого управления и текущих движущих сил можно найти максимальную предварительную нагрузку pN, которая приводит к микропроскальзываниям несколько ниже предела микропроскальзывания.
Вычисляется правильная предварительная нагрузка pN (с помощью этой последовательности вычислений предварительная нагрузка не может превышать максимальный предел). Положение поршня рулевого управления известно благодаря отношению выходной и входной скорости (или непосредственно из датчика положения). Это положение определяет все геометрические условия. Центробежные силы известны из входной скорости и движущие силы известны согласно скорости вращения двигателя (=вход) и положения дроссельной заслонки.
Для получения скорости vS рулевого управления также вычисляется давление рулевого управления. Поперечная скорость известна в каждой контактной точке при качении и поперечные силы вычисляются с помощью теории микропроскальзывания. Результирующая величина представляет собой чисто усилие рулевого управления.
Этап 5:
Когда давление рулевого управления находится выше предела, скорость vS рулевого управления должна быть уменьшена и контроллер переходит назад к этапу 1; если нет, предварительная нагрузка pN и давление рулевого управления переднего хода pSF определяются так, чтобы оставаться в пределах микропроскальзывания и использовать двигатель настолько близко, насколько возможно к его точке максимальной эффективности для данного (переменного) требования мощности.
Пример 4: Гидравлические системы
Гидравлические источники питания
Предпочтительный гидравлический источник питания показан на фиг.5.
Безопасность
Когда может использоваться только один пропорциональный клапан для давления рулевого управления переднего хода pSF и другой пропорциональный клапан для давления рулевого управления заднего хода pSR, может возникать небезопасное состояние, когда предполагается, что автомобиль двигается вперед, пропорциональный клапан для pSF (33) перекрывается до нулевого давления. В этом случае центробежные силы будут изменять передаточное отношение очень быстро до нулевого отношения скоростей с тем, чтобы двигатель мог вращаться с чрезмерной скоростью и колеса были блокированы. Для того чтобы избежать эти последствия, добавлены два предохранительных отсечных клапана (36, 37) и клапаны (33, 34) ('пропорциональные клапаны'), понижающие давление, устанавливающие всегда минимальное давление смещения (т.е. 0,5 бар) на обеих сторонах поршня (28) рулевого управления. Это давление смещения поддерживает предохранительные отсечные клапаны (запорные) (36, 37) открытыми. Когда один пропорциональный клапан (33 или 34) перекрывается до нулевого давления, соответствующий запорный клапан (36 или соответственно 37) отводит предварительную нагрузку pN и трансмиссия не передает никакой крутящий момент. Автомобиль будет двигаться по инерции и двигатель предохранен посредством его собственной защиты от превышения частоты вращения. В этих условиях трансмиссия находится в режиме "нейтраль" (только в этом аварийном случае втулка (17) будет поддерживать центрально-круглое зубчатое колесо (3а, 1b)).
Гидравлическая мощность
Во время ускорений при полностью открытой дроссельной заслонке высокое давление (т.е. 20-50 бар) необходимо почти без потока. В этой ситуации необходимая гидравлическая мощность составляет около 50 Вт, но во время быстрого изменения отношения, необходимо одновременно высокое давление, в течение доли секунды. Гидравлическая пиковая мощность может возрастать до около 10 кВт. При движении с постоянной скоростью и умеренной мощностью двигателя гидравлические давления pN и pSF являются низкими (около 10 бар) и необходимая гидравлическая мощность составляет менее 5 Вт.
Для того чтобы удовлетворить эти требования с эффективным потреблением мощности и низкой стоимостью, выбрано решение с аккумулятором (38) низкого давления и аккумулятором (39) высокого давления.
Гидравлическая схема
Масляный насос (40) посредством малого перемещения приводится от двигателя. Включатель (41) гидравлического насоса является запорным клапаном, который выбирает, подает ли насос (40) мощность к одному из аккумуляторов (38 или 39) или он отводит всю подачу насоса обратно в маслосборник, таким образом, почти не потребляя мощности от двигателя. Включатель (42) гидравлической подачи выбирает, который аккумулятор подлежит наполнению. Аккумулятор (39) высокого давления устанавливает первоочередность над аккумулятором (38) низкого давления. Включатель (43) гидравлического аккумулятора выбирает, какой аккумулятор используется в качестве подачи для трех пропорциональных клапанов: используется аккумулятор с наименьшим давлением, превышающим максимальное из требуемых давлений. В качестве вводимой информации для контроллера трансмиссии используются датчики (44) давления, контролирующие давления аккумуляторов. Давления pN, pSF и pSR контролируются, как описано выше в 4.4.
Пример 5: Охлаждение и фильтрование
Микроскольжение на поверхностях скольжения вызывает нагрев. При высокой мощности двигателя и высоком отношении крутящих моментов производится больше тепла, по сравнению с тем, сколько тепла будет передаваться окружающей газообразной среде или текучей среде. Этот избыток тепла будет повышать температуру сателлита, центрального и круглого зубчатых колес. При более низких уровнях мощности или более низком отношении крутящих моментов вращающиеся компоненты будут охлаждаться за счет конвекции в окружающую газообразную среду или текучую среду. Возможно, охлаждающие ребра на сателлитах и на внутренней стороне круглого и центрального зубчатого колес могут быть добавлены для улучшения переноса тепла. Эта газообразная или текучая среда может быть инертным газом для того, чтобы избежать коррозии стальных частей, хотя она также может быть обычным воздухом, комбинированным со смазкой или газообразной средой с туманом холодильного агента. Охлаждающие ребра на внутренней стороне корпуса будут переносить тепло инертного газа или текучей среды к корпусу. Корпус, сам по себе, возможно оснащенный охлаждающими ребрами с наружной стороны, будет охлаждаться движущимся воздушным потоком. В некоторых применениях или условиях охлаждение за счет конвекции, как описано выше, может быть недостаточным. В этом случае будет добавлен вентилятор, прогоняющий газообразную среду, или насос, циркулирующий текучую среду. Газообразная среда или текучая среда будут охлаждаться снаружи корпуса. Частицы продуктов износа из поверхностей качения будут собираться в фильтре в том же самом контуре.
Пример 6: Альтернативные исполнения трансмиссии
С использованием планетарного вариатора могут быть выполнены различные компоновки трансмиссии посредством соединения круглого зубчатого колеса 1, центрального зубчатого колеса 3 и центрального вала 9 с другими планетарными вариаторами или с другими трансмиссионными компонентами такими, как системы планетарной передачи или передачи со смещением.
Ниже приведены некоторые примеры из множества различных возможностей:
Фиг.6 изображает пример реверсивной трансмиссии, состоящей из двух планетарных вариаторов. 'Реверсивный' означает трансмиссию, которая может не только непрерывно изменять свое отношение к нулевой выходной скорости, но также непрерывно изменять выходное направление вращения. В отношении компоновки согласно фиг.3 эта альтернатива имеет преимущество в том, что сателлитные зубчатые колеса 5 и вилки 4 первичного вариатора не вращаются вокруг центрального вала 9а. Таким образом, они не подвергаются действию значительных центробежных сил. Недостаток состоит в том, что самое высокое отношение скоростей является ниже, чем в исполнении согласно фиг.2. Два центральных вала 9 альтернативного исполнения должны перемещаться аксиально с помощью двух поршней рулевого управления, например, для регулирования передаточного отношения, в то время как в исходном исполнении требуется только один поршень 28 рулевого управления.
Входной вал 11 приводит в действие первичное центральное зубчатое колесо 3а и вторичное круглое зубчатое колесо 1b. Первичные сателлиты 2а подсоединены к первичному центральному валу 9а с помощью шарнирных пальцев 8 таким же образом, как и в исходном исполнении. Первичный центральный вал 9а не может вращаться, но он может перемещаться аксиально за счет усилий 53а рулевого управления. Эти усилия регулируют аксиальное положение центрального вала 9а и, таким образом, также регулируют передаточное отношение. Первичное круглое зубчатое колесо 1а подсоединено механическим способом к вторичному центральному зубчатому колесу 3b через устройство 47 передачи крутящего момента. Устройство 47 передачи крутящего момента передает крутящий момент между двумя компонентами, но позволяет аксиальное перемещение между этими компонентами. Это может быть выполнено при помощи шлицевого соединения, хотя возможны альтернативные механизмы. Вторичный центральный вал 9b соединен с выходным валом 46 с помощью подобного устройства 47 передачи крутящего момента. Аналогичным образом вторичный центральный вал 9b размещен аксиально посредством усилий 53b рулевого управления для получения требуемого передаточного отношения.
Все контактные поверхности круглого зубчатого колеса 1, сателлитов 2 и центрального зубчатого колеса 3 первичного и вторичного планетарных вариаторов прижимаются друг к другу для передачи крутящего момента посредством силы трения. Это осуществляется с помощью только одной предварительной нагрузки 52, действующей через подшипник на первичное круглое зубчатое колесо 1а. Противодействующая сила передается от вторичного центрального зубчатого колеса 3b через подшипник на корпус.
Фиг.7 изображает другое альтернативное исполнение реверсивной трансмиссии. Здесь вторичный планетарный вариатор заменен на обычную систему планетарной передачи (с постоянным передаточным отношением). В этом исполнении центральный вал 9 планетарного вариатора является неподвижным и, таким образом, центробежные силы не действуют на подшипники сателлитов 2. Самое большое передаточное отношение в обоих направлениях вращения согласно этому исполнению, конечно, является ниже, чем в предыдущей компоновке согласно фиг.6.
Первичный планетарный вариатор является одинаковым с планетарным вариатором согласно фиг.6. В этом случае первичное круглое зубчатое колесо 1а подсоединено к круглой шестерне 48 через устройство 47 передачи крутящего момента. Центральное зубчатое колесо 3а подсоединено к центральной шестерне 51. Крутящий момент передается на сателлитные шестерни 49, приводящие в действие водило 50 сателлитной шестерни, которое представляет собой выход трансмиссии. Между планетарным вариатором и системой сателлитных шестерен необходимо уплотнение, чтобы избегать того, что смазочное масло для системы шестерен может достигать внутренней части корпуса планетарного вариатора. Поскольку эта трансмиссия также является "реверсивной", выходная скорость может изменяться непрерывно до нуля и направление вращения на выходе также может изменяться непрерывно.
Переменная трансмиссия с фиксированным направлением вращения на выходе показана на фиг.8. С помощью этой концепции произвольное количество планетарных вариаторов может быть комбинировано для достижения большого разброса отношений. Если передаточное отношение одного планетарного вариатора изменяется от r до 1/r, то полный разброс отношений для n планетарных вариаторов становится r(2n) (по абсолютной величине). В изображенных примерах r равно около 2.
Входной вал 11 приводит в действие первичное центральное зубчатое колесо 3а. Все центральные валы 9 каждого планетарного вариатора соединены. Центральный вал 9 не может вращаться, но может быть размещен посредством одного аксиального усилия 45 рулевого управления. Все контакты при качении прижаты друг к другу за счет приложения только одной предварительной нагрузки 52 на круглое зубчатое колесо 1b на выходе посредством подшипника. Противодействующая сила передается на корпус от первичного центрального зубчатого колеса 3а через подшипник. Поскольку центральные валы 9 не вращаются, отсутствуют центробежные силы, действующие на подшипники сателлитных зубчатых колес 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕВЕРСИВНАЯ ПЕРЕМЕННАЯ ТРАНСМИССИЯ (RVT) С ПОВЫШЕННОЙ УДЕЛЬНОЙ МОЩНОСТЬЮ | 2013 |
|
RU2654431C2 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ПОРШНЕЙ В ЦИЛИНДРАХ ПОРШНЕВОГО РОТОРА ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ РОТОРА И ПЕРЕДАТОЧНЫЙ МЕХАНИЗМ | 2012 |
|
RU2518136C2 |
| БЕССТУПЕНЧАТАЯ ТРАНСМИССИЯ, МЕХАНИЗМ РЕВЕРСИРОВАНИЯ, МОДУЛЬ ВАРЬИРОВАНИЯ И УПРАВЛЯЕМЫЙ ОГРАНИЧИТЕЛЬ ДИАПАЗОНА ПЕРЕДАТОЧНЫХ ЧИСЕЛ | 2006 |
|
RU2300032C1 |
| БЕССТУПЕНЧАТАЯ ТРАНСМИССИЯ, ВАРИАТОР, ОГРАНИЧИТЕЛЬ ДИАПАЗОНА ПЕРЕДАТОЧНЫХ ЧИСЕЛ И САТЕЛЛИТ | 2009 |
|
RU2399814C1 |
| УЗЕЛ ПЛАНЕТАРНОЙ ЗУБЧАТОЙ ПЕРЕДАЧИ | 1995 |
|
RU2145396C1 |
| Трансмиссия автомобиля | 1980 |
|
SU961551A3 |
| АВТОМОБИЛЬНЫЙ ВАРИАТОР | 1997 |
|
RU2127382C1 |
| БЕССТУПЕНЧАТАЯ ТРАНСМИССИЯ | 2021 |
|
RU2756733C1 |
| ШИРОКОДИАПАЗОННАЯ РЕВЕРСИВНАЯ ТРАНСМИССИЯ | 2020 |
|
RU2729847C1 |
| Бесступенчатая коробка передач с повышенным диапазоном передаточных отношений | 2019 |
|
RU2716396C1 |



















Изобретение относится к области коробок передач и трансмиссий транспортных средств. Изобретение раскрывает планетарный вариатор, комбинацию системы реверсивной переменной трансмиссии, состоящей из этих планетарных вариаторов, гидравлическую систему для управления реверсивной переменной трансмиссией и способ для регулирования данной гидравлической системы. Достигается повышение эффективности двигателя путем уменьшения удельного расхода топлива. 8 н. и 6 з.п ф-лы, 13 ил.
1. Планетарный вариатор, функционирующий как подсистема для переменных или реверсивных трансмиссий и выполненный с возможностью непрерывного изменения передаточного отношения, отличающийся тем, что он состоит из круглого зубчатого колеса, двух или более сателлитов, установленных вокруг центрального вала, и центрального зубчатого колеса таким образом, чтобы каждый компонент, а именно круглое зубчатое колесо, центральный вал и центральное зубчатое колесо, образовывали зону взаимодействия с другими трансмиссионными компонентами; круглое зубчатое колесо представляет собой осесимметричное тело вокруг центральной оси с поверхностью вращения трактрисы, причем эта поверхность предпочтительно упрочнена или покрыта для выдерживания тяговых и сжимающих нагрузок; центральное зубчатое колесо, по существу, является таким же, как круглое зубчатое колесо, но внутренний и внешний диаметры трактрисы могут отличаться от диаметров круглого зубчатого колеса; сателлиты состоят из сателлитного зубчатого колеса с, по существу, конической поверхностью вращения, предпочтительно упрочненной или покрытой для передачи тяговых и сжимающих нагрузок, установленного с возможностью свободного вращения вокруг сателлитной вилки посредством радиальных и осевых подшипников или втулок, причем виртуальная вершина упомянутого конуса совпадает с пересечением оси центрального вала с осью шарнира сателлита; каждая сателлитная вилка одного планетарного вариатора выполнена с возможностью свободного вращения вокруг шарнирного соединения, ось которого перпендикулярна оси центрального вала и параллельна плоскости сателлитного зубчатого колеса, причем каждая сателлитная вилка и каждое сателлитное зубчатое колесо выполнены с возможностью не взаимодействовать друг с другом для всех применительных углов наклона между осью сателлита и осью центрального вала; круглое зубчатое колесо, сателлиты и центральное зубчатое колесо прижаты друг к другу для того, чтобы поверхности качения находились в контакте друг с другом и чтобы контактные давления были достаточно высокими для передачи требуемого крутящего момента; центральный вал перемещается аксиально (продольно) с определенной скоростью в зависимости от сжимающей силы и передаваемого крутящего момента для обеспечения изменения передаточного отношения; трактриса круглого и центрального зубчатого колеса имеет, для обоих, параметр длины L такой же, как длина от контактной точки при качении сателлитного зубчатого колеса до пересечения оси шарнира с осью центрального вала, где L используется в уравнении трактрисы +/-x+c=L*(cosα+ln|tan(α/2)|), где с произвольная константа и α - угол наклона между касательной в контактной точке и осью центрального вала; и форма поверхностей качения сателлитных зубчатых колес, которые, по существу, являются коническими, слегка отклоняется от этой теоретической формы выпуклым образом для оптимизации распределения контактного давления.
2. Планетарный вариатор по п.1, отличающийся тем, что поток смазки для подшипников или втулок внутри сателлитов, по возможности, осуществляется посредством замкнутого контура для каждого сателлита, причем масло рециркулирует посредством лопастей внутри сателлитов, откачивая масло, которое далее направляется через подшипники или втулки; альтернативный поток смазки для подшипников или втулок внутри сателлитов, по возможности, осуществляется посредством объединения этого потока масла в основной поток смазки, содержащий все подшипники входного и выходного валов, при этом данный поток выводится из центрального вала через один из шарниров (в частности один из шарнирных пальцев), направляется через подшипники сателлитов и оттекает назад через другой шарнир (или другой шарнирный палец) в центральный вал; при этом другая альтернатива состоит в том, что подшипники сателлитов промасливаются смазочным материалом или используются комбинированные подшипники, которые не требуют никакой смазки.
3. Реверсивная переменная трансмиссия, содержащая первичный и вторичный планетарные вариаторы, каждый из которых является вариатором по п.1, отличающаяся тем, что круглое зубчатое колесо первичного планетарного вариатора соединено с корпусом для того, чтобы оно не могло вращаться, но могло перемещаться аксиально посредством предварительной нагрузки, прижимающей все контакты качения обоих планетарных вариаторов; центральные валы обоих планетарных вариаторов комбинированы в один главный вал и соединены с возможностью вращения с трансмиссионным входным валом и с возможностью аксиального перемещения посредством усилия рулевого управления в обоих направлениях, в то время как входной вал не перемещается аксиально; центральное зубчатое колесо первичного планетарного вариатора подсоединено к круглому зубчатому колесу вторичного планетарного вариатора для того, чтобы комбинированное круглое-центральное зубчатое колесо могло вращаться вокруг центральной оси трансмиссии; и центральное зубчатое колесо вторичного планетарного вариатора соединено с выходным валом трансмиссии, причем противодействующая сила предварительной нагрузки передается на корпус через осевой подшипник.
4. Реверсивная переменная трансмиссия по п.3, отличающаяся тем, что относительные размеры круглого зубчатого колеса, центрального зубчатого колеса и сателлитов выбраны соответственно для применения в автомобиле, с учетом того, что самое высокое отношение скоростей является настолько высоким, что двигатель почти всегда может вырабатывать свою мощность в точке своей наилучшей эффективности, в частности, размерами, относящимися к передаточному отношению, являются: внешний диаметр первичного и вторичного круглых зубчатых колес, внутренний диаметр первичного и вторичного центральных зубчатых колес, эффективный диаметр сателлитных зубчатых колес, параметр длины L уравнения трактрисы; полученное передаточное отношение скоростей, например, составляет 2,266 (по абсолютной величине); относительные размеры круглого зубчатого колеса, центрального зубчатого колеса и сателлитов выбраны соответственно для применения в автомобиле, с учетом того, что самое высокое отношение скоростей заднего хода является достаточно высоким для приведения в движение автомобиля при средней скорости вращения двигателя и низком уровне шума заднего хода, в частности, размерами, относящимися к передаточному отношению заднего хода, являются: внутренний диаметр первичного и вторичного круглых зубчатых колес, внешний диаметр первичного и вторичного центральных зубчатых колес, эффективный диаметр сателлитных зубчатых колес, параметр длины L уравнения трактрисы; полученное передаточное отношение скоростей заднего хода, например, составляет 0,695; и посредством перемещения главного вала трансмиссии передаточное отношение изменяется непрерывно между наивысшим отношением скоростей переднего хода во время остановки и наивысшим передаточным отношением заднего хода.
5. Реверсивная переменная трансмиссия по п.3, отличающаяся тем, что нормальная сила на каждом контакте при качении создается посредством одной предварительной нагрузки, действующей со стороны корпуса на невращающееся первичное круглое зубчатое колесо, причем противодействующая сила передается посредством одного подшипника от вторичного центрального зубчатого колеса на корпус; при этом чистые усилия рулевого управления для определения положения главного вала и, таким образом, также для определения передаточного отношения создаются на главном валу, причем указанные усилия передаются через подшипник к корпусу.
6. Реверсивная переменная трансмиссия по п.5, отличающаяся тем, что предварительная нагрузка создается с помощью одного или более поршня и системы (систем) цилиндров между корпусом и первичным круглым зубчатым колесом и приводится в действие при помощи одного пневматического или гидравлического давления или создается за счет системы предварительной механической нагрузки, причем эта система предварительной механической нагрузки может также быть использована в качестве стояночного тормоза, когда трансмиссия задается с нулевым отношением скоростей; при этом давление рулевого управления создается гидравлической или пневматической системой поршня и цилиндра, способной функционировать в обоих направлениях, составляющей одно целое с выходным валом и главным валом; причем гидравлическое или пневматическое давление для создания давления рулевого управления обеспечено уплотнением между неподвижным корпусом и вращающимся входным валом с помощью поршневых колец или уплотнений, выполненных с возможностью уплотнения элементов, вращающихся с различными скоростями вращения.
7. Переменная трансмиссия по п.3, отличающаяся тем, что внутренняя часть трансмиссии, где контакты при качении являются перемещающимися, заполняется инертным газом или обычным воздухом и разбрызгивающейся жидкостью для охлаждения и смазки, или газообразной средой с туманом холодильного агента; причем упомянутая внутренняя часть изолирована от смазочного масла для подшипников и от наружной части трансмиссии.
8. Переменная трансмиссия по п.3, отличающаяся тем, что поток смазки для подшипников или втулок внутри сателлитов, по возможности, осуществляется посредством замкнутого контура для каждого сателлита, причем масло рециркулирует посредством лопастей внутри сателлитов, откачивая масло, которое далее направляется через подшипники или втулки; альтернативный поток смазки для подшипников или втулок внутри сателлитов, по возможности, осуществляется посредством объединения этого потока масла в основной поток смазки, содержащий все подшипники входного и выходного валов, при этом данный поток выводится из центрального вала через один из шарниров (в частности один из шарнирных пальцев), направляется через подшипники сателлитов и оттекает назад через другой шарнир (или другой шарнирный палец) в центральный вал; при этом другая альтернатива состоит в том, что подшипники сателлитов промасливаются смазочным материалом или используются комбинированные подшипники, которые не требуют никакой смазки.
9. Гидравлическая система, предназначенная для регулирования реверсивной переменной трансмиссии по п.3 в легковом автомобиле, грузовом автомобиле или другом шоссейном или внедорожном транспортном средстве, отличающаяся тем, что один насос с приводом от двигателя используется для подачи гидравлического давления и потока; аккумулятор высокого и низкого давления объединены в систему, в которой текучая среда от аккумулятора низкого давления для повышения давления на поршень предварительной нагрузки и поршень рулевого управления используется в первую очередь по отношению к аккумулятору высокого давления; аккумулятор высокого давления наполняется с помощью насоса в первую очередь по отношению к аккумулятору низкого давления; клапан, понижающий давление, используется для регулирования предварительной нагрузки и давлений рулевого управления при движении в прямом и обратном направлениях; по возможности, добавляется предохранительное устройство в виде двух отсечных клапанов в линии предварительной нагрузки, причем один из них выключается посредством давления рулевого управления прямого хода, а другой - давлением рулевого управления заднего хода для обеспечения отвода предварительной нагрузки сразу, как только одно из действующих давлений рулевого управления падает ниже заданного давления смещения; и упомянутое предохранительное устройство может быть упрощено за счет удаления предохранительного отсечного клапана из гидравлической схемы.
10. Реализуемый на компьютере способ для регулирования гидравлической системы по п.9 в легковом автомобиле, грузовом автомобиле или другом шоссейном или внедорожном транспортном средстве, отличающийся тем, что кривая (крутящего момента двигателя как функция скорости вращения двигателя), выражающая минимальный расход топлива для каждого уровня мощности двигателя, сохраняется в памяти контроллеров; PID-контроллер определяет скорость поршня рулевого управления, присоединенного к главному валу, для получения скорости вращения двигателя, которая равна требуемой скорости вращения двигателя, вычисленной по кривой минимального расхода топлива; скорость поршня рулевого управления, которая предложена PID-контроллером, может быть уменьшена для того, чтобы оставаться в пределах диапазона микропроскальзывания, с учетом методики вычислений; и предварительная нагрузка и давление рулевого управления, определяющие угол сателлитов относительно оси главного вала, вычисляются с учетом опубликованной теории продольного и поперечного микропроскальзывания.
11. Комбинация из одного или более планетарных вариаторов по п.1 в различных компоновках переменной трансмиссии, отличающаяся тем, что каждый элемент взаимодействия планетарного вариатора, а именно круглое зубчатое колесо, центральный вал и центральное зубчатое колесо, может быть соединен с входом, выходом, корпусом трансмиссии, элементом взаимодействия с другим планетарным вариатором или любым другим компонентом трансмиссии, таким, как смещенные шестерни или системы сателлитных шестерен; причем под выражением "реверсивный" в данном случае подразумевается переменная трансмиссия, выходное направление вращения которой относительно входного направления вращения может изменяться непрерывно и отношение скоростей которой определяется даже при низкой и нулевой выходной скорости без элементов (макро-) проскальзывания, которые, например, используются в преобразователях крутящего момента или фрикционных дисковых муфтах.
12. Способ передачи мощности при переменных скоростях в средстве, выбранном из группы, состоящей из легкового автомобиля, грузового автомобиля, автобуса, внедорожного автомобиля, сенокосилки, ветряной турбины, манипулятора с телескопической стрелой, автопогрузчика или любого другого промышленного применения, в котором требуется передача мощности при переменных скоростях, причем указанное средство содержит реверсивную переменную трансмиссию по п.3.
13. Комбинация системы реверсивной переменной трансмиссии, содержащей трансмиссию по п.3, гидравлической системы, предназначенной для управления реверсивной переменной трансмиссией по п.3 в легковом автомобиле, грузовом автомобиле или другом шоссейном или внедорожном транспортном средстве, отличающаяся тем, что: один насос с приводом от двигателя используется для подачи гидравлического давления и потока; аккумулятор высокого и низкого давления объединены в систему, в которой текучая среда от аккумулятора низкого давления для повышения давления на поршень предварительной нагрузки и поршень рулевого управления используется в первую очередь по отношению к аккумулятору высокого давления; аккумулятор высокого давления наполняется с помощью насоса в первую очередь по отношению к аккумулятору низкого давления; клапан, понижающий давление, используется для регулирования предварительной нагрузки и давлений рулевого управления при движении в прямом и обратном направлениях; по возможности, добавляется предохранительное устройство в виде двух отсечных клапанов в линии предварительной нагрузки, причем один из них выключается посредством давления рулевого управления прямого хода, а другой - давлением рулевого управления заднего хода для обеспечения отвода предварительной нагрузки сразу, как только одно из действующих давлений рулевого управления падает ниже заданного давления смещения; и упомянутое предохранительное устройство может быть упрощено за счет удаления предохранительного отсечного клапана из гидравлической схемы; причем имеется программа системы программного обеспечения, предназначенная для управления реверсивной переменной трансмиссией по п.3 с гидравлическим клапаном, при этом кривая (крутящего момента двигателя как функция скорости вращения двигателя), выражающая минимальный расход топлива для каждого уровня мощности двигателя, сохраняется в памяти контроллеров; PID-контроллер определяет скорость поршня рулевого управления, присоединенного к главному валу, для получения скорости вращения двигателя, которая равна требуемой скорости вращения двигателя, вычисленной по кривой минимального расхода топлива; скорость поршня рулевого управления, которая предложена PID-контроллером, может быть уменьшена для того, чтобы оставаться в пределах диапазона микропроскальзывания, с учетом методики вычислений; и предварительная нагрузка и давление рулевого управления, определяющие угол сателлитов относительно оси главного вала, вычисляются с учетом опубликованной теории продольного и поперечного микропроскальзываний.
14. Реализуемый на компьютере способ для управления реверсивной переменной трансмиссией по п.3 в легковом автомобиле, грузовом автомобиле или другом шоссейном или внедорожном транспортном средстве, отличающийся тем, что кривая (крутящего момента двигателя как функция скорости вращения двигателя), выражающая минимальный расход топлива для каждого уровня мощности двигателя, сохраняется в памяти контроллеров; PID-контроллер определяет скорость поршня рулевого управления, присоединенного к главному валу, для получения скорости вращения двигателя, которая равна требуемой скорости вращения двигателя, вычисленной по кривой минимального расхода топлива; скорость поршня рулевого управления, которая предложена PID-контроллером, может быть уменьшена для того, чтобы оставаться в пределах диапазона микропроскальзывания, с учетом методики вычислений; и предварительная нагрузка и давление рулевого управления, определяющие угол сателлитов относительно оси главного вала, вычисляются с учетом опубликованной теории продольного и поперечного микропроскальзываний.
| US 1856383 A, 03.05.1932 | |||
| СПОСОБ ПРИГОТОВЛЕНИЯ КАТАЛИЗАТОРА ДЛЯ ПОЛИМЕРИЗАЦИИ ОЛЕФИНОВ | 1967 |
|
SU215209A1 |
| RU 2004863 C1, 15.12.1993 | |||
| ВАРИАТОР ДЛЯ БЕССТУПЕНЧАТОЙ КОРОБКИ ПЕРЕДАЧ С ПЕРЕДАЧЕЙ УСИЛИЯ РОЛИКАМИ ПО ТОРОИДАЛЬНЫМ БЕГОВЫМ ПОВЕРХНОСТЯМ | 1991 |
|
RU2096671C1 |

