Изобретение относится к области телевизионно-вычислительной техники и может быть использовано для решения задачи автоматического обнаружения появления объектов на изображениях по видеопоследовательности в интеллектуальных системах технического зрения, видеонаблюдения и видеоконтроля, а также может использоваться в качестве подсистемы для систем более высокого уровня интерпретации, с помощью которых обнаруживаются движущиеся объекты и определяются их параметры.
Известен способ обнаружения движущихся транспортных средств, включающий получение кадров, вычисление разности между кадрами, бинаризацию по порогу, морфологические операции, вычисление оператора Собеля для определения границ объекта. В качестве фона фиксируют первый кадр, при каждом последующем кадре корректируют фон по формуле, определяют разность между текущим кадром и фоном, получают гистограмму яркостей по всему изображению (см. патент RU 2262661 С2, 19.05.2008 «Способ обнаружения движущихся транспортных средств»).
Недостатком данного способа является его вычислительная сложность, а также невозможность обнаружения появления новых стационарных объектов в зоне контроля видеокамеры.
Наиболее близкими по технической сущности к заявляемому способу является способ обнаружения объектов на изображении, который содержит этапы получения кадров, инициализации фонового кадра, инициализации порогового кадра. Далее для каждого из полученных кадров выполняют вычисление разности между текущим кадром и фоновым кадром, бинаризацию с пороговым кадром, пространственную фильтрацию, обеспечивающую обнаружение объектов, при этом корректировку фонового кадра осуществляют с помощью постоянной обновления фонового кадра, которую в свою очередь выбирают в каждом пикселе в зависимости от обнаружения в нем объекта по определенному правилу (см. патент RU 2395787 С2, 19.05.2008 «Способ обнаружения объектов»). Недостатком данного способа является наличие процедур пространственной фильтрации, корректировки фонового кадра и формирования зон предварительного обнаружения, т.е. его вычислительная сложность.
Техническим результатом предлагаемого способа являются повышение вероятности правильного обнаружения и уменьшение вычислительных затрат при обнаружении появления объектов на изображениях.
Указанный технический результат достигается тем, что в предлагаемом способе обнаружения появления объектов на изображениях из получаемой видеокамерой видеопоследовательности инициализируют соседние кадры - предыдущий и текущий в моменты времени tk и tk+1 соответственно, из полученных кадров вычитают постоянную составляющую (среднее значение яркости кадров), измеряют энергетический спектр данных кадров и представляют в виде Sпр-матрицы предыдущего и Sтек-матрицы текущего кадров, каждая размерностью q×q, где  , Q - количество коэффициентов разложения энергетического спектра изображения в двумерный ряд Фурье по косинусам, определяют характеристики δ2 и δ3 как отношение главных миноров Sпр-матрицы предыдущего и Sтек-матрицы текущего кадров, определяют разности отношений соответствующих главных миноров для двух соседних кадров и сравнивают полученную разность с порогом, принимая решение об обнаружении появления объекта в текущем кадре изображения.
, Q - количество коэффициентов разложения энергетического спектра изображения в двумерный ряд Фурье по косинусам, определяют характеристики δ2 и δ3 как отношение главных миноров Sпр-матрицы предыдущего и Sтек-матрицы текущего кадров, определяют разности отношений соответствующих главных миноров для двух соседних кадров и сравнивают полученную разность с порогом, принимая решение об обнаружении появления объекта в текущем кадре изображения.
Сущность предлагаемого способа заключается в следующем:
- в формирователи S-матриц вводятся соседние кадры - предыдущего и текущего изображений в моменты времени tk и tk+1, где измеряют их энергетический спектр, например, по одному из способов, описанных в патентах RU 2373544 С1, 05.11.2008 «Способ измерения параметров энергетического спектра изображения» или RU 2370780 С1, 25.07.2008 «Способ измерения параметров энергетического спектра двумерного сигнала» и формируют Sпр-матрицу предыдущего и Sтек-матрицу текущего кадров, элементами которой являются коэффициенты разложения энергетического спектра изображения в двумерный ряд Фурье по косинусам (см. Богословский А.В., Жигулина И.В. Эффективность многомерной дискретной фильтрации // Радиотехника, 2008, №4.);
- определяются характеристики δ2 и δ3 для предыдущего и текущего кадров соответственно по формулам (1) и (2):

где S0,-1, S-1,0, S-1,-1 - элементы S-матриц предыдущего и текущего кадров соответственно;
- определяют значение величины порога по фоновым кадрам (в моменты времени t1 и t2), например, по правилу

где  и
и  - разница характеристик δ2 и δ3 для текущего и предыдущего кадров соответственно; порог может быть односторонний или двухсторонний;
- разница характеристик δ2 и δ3 для текущего и предыдущего кадров соответственно; порог может быть односторонний или двухсторонний;
- сигнализируют о появлении объекта в текущем кадре, если значения H2 или H3 превышают по абсолютной величине |H0|.
Способ может быть реализован, например, с помощью устройства, структурная схема которого, представлена на фигуре 1, где обозначены:
1 - видеокамера, предназначена для формирования изображения;
2-1 и 2-2 - формирователи S-матриц, предназначенные для измерения энергетического спектра изображений и формирования Sпр-матрицы предыдущего и Sтек-матрицы текущего кадров в моменты времени tk и tk+1 соответственно;
3-1 и 3-2 - блоки определения характеристик δ2 и δ3 в моменты времени tk и tk+1 соответственно;
4 - схема вычитания δ2 и δ3, предназначена для получения значений величин H2 и H3 для текущего и предыдущего кадров соответственно;
5 - блок пороговой обработки (схема сравнения H2 и H3 последующих кадров с |H0|);
6 - обнаружитель появления объектов, предназначен для сигнализации появления объектов на текущем кадре изображения, если значение H2 или H3 превышает по абсолютной величине |H0|.
Структурная схема обнаружения объектов на изображениях (фиг.1) функционирует следующим образом:
1) изображение реальной сцены поступает на блок 1 (видеокамеру), где формируется видеопоследовательность, кадры которой преобразуются в распределения яркости (происходит покадровая дискретизация сигнала);
2) первый кадр (предыдущий) видеопоследовательности в виде значений яркостей поступает с выхода 1 блока 1 на вход блока 2-1, где измеряется его энергетический спектр и формируется Sпр-матрица;
3) второй кадр (текущий) видеопоследовательности в виде значений яркостей поступает с выхода 2 блока 1 на вход блока 2-2, где измеряется его энергетический спектр и формируется Sтек-матрица;
4) далее измеренные значения Sпр-матрицы и Sтек-матрицы с выходов блоков 2-1 и 2-2 соответственно поступают на вход блоков 3-1 и 3-2, где происходит вычисление характеристик δ2 и δ3 для предыдущего и текущего кадров по формулам (1) и (2);
5) значения характеристик предыдущего и текущего кадров δ2 и δ3 с выходов блоков 3-1 и 3-2 поступают соответственно на 1 и 2 входы блока 4, где происходит их вычитание (определяются разницы характеристик и ) и находится значение величины порога Н0 по правилу (3);
6) далее значение величины порога H0 с выхода блока 4 поступает на блок 5, где происходит его запоминание и осуществляется его сравнение со значениями H2 и H3 последующих кадров видеопоследовательности;
7) если значения H2 или H3 последующих кадров превышают по абсолютной величине |H0|, то с выхода блока 5 на вход блока 6 подается управляющее воздействие и с выхода блока 6, являющегося выходом устройства, сигнализируется появление объекта в текущем кадре.
Применение данного способа обнаружения появления объектов на изображениях позволит повысить вероятность правильного обнаружения и уменьшить вычислительные затраты при решении задачи обнаружения объектов на изображениях.
Проведенный заявителями анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах изобретения, позволил установить, что заявители не обнаружили аналогов, характеризующихся признаками, тождественными всем существенным признакам изобретения.
Следовательно, заявленное изобретение «Способ поиска и распознавания объектов на цифровых изображениях» соответствует критерию «новизна».
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обнаружения объектов, определения их геометрической формы и ориентации на изображениях | 2015 |
|
RU2623891C2 |
| СПОСОБ СРАВНЕНИЯ ЦИФРОВЫХ ИЗОБРАЖЕНИЙ | 2017 |
|
RU2673396C1 |
| Устройство для удаления логотипов и субтитров с видеопоследовательностей | 2017 |
|
RU2669470C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРА ДВИЖЕНИЯ ОБЪЕКТА НА КАДРАХ ВИДЕОПОСЛЕДОВАТЕЛЬНОСТИ | 2019 |
|
RU2737343C2 |
| СПОСОБ ВИЗУАЛИЗАЦИИ СЛЕДОВ СВЕЧЕНИЯ ОБЪЕКТА | 2012 |
|
RU2514778C2 |
| СПОСОБ И УСТРОЙСТВО ОБНАРУЖЕНИЯ ДЕФЕКТОВ НА ВИДЕОСИГНАЛАХ | 2013 |
|
RU2535449C2 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ ДЛЯ ВЫДЕЛЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ В ПОСЛЕДОВАТЕЛЬНОСТИ ТЕЛЕВИЗИОННЫХ ИЗОБРАЖЕНИЙ | 2006 |
|
RU2311684C1 |
| СПОСОБ ОБРАБОТКИ ПОСЛЕДОВАТЕЛЬНОСТИ ИЗОБРАЖЕНИЙ ДЛЯ ОБНАРУЖЕНИЯ И СЛЕЖЕНИЯ ЗА ВОЗДУШНЫМИ ОБЪЕКТАМИ | 2010 |
|
RU2419150C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ И ОПРЕДЕЛЕНИЯ ИХ ПАРАМЕТРОВ | 2010 |
|
RU2446471C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ВЗВЕШЕННЫХ ЧАСТИЦ ПРОИЗВОЛЬНОЙ ФОРМЫ | 2013 |
|
RU2534723C1 |
Изобретение относится к средствам автоматического обнаружения объектов на изображениях. Техническим результатом является повышение точности обнаружения объектов на изображениях. В способе из видеопоследовательности инициализируют соседние кадры, из полученных кадров вычитают постоянную составляющую, измеряют энергетический спектр данных кадров и представляют в виде матрицы предыдущего и матрицы текущего кадров, определяют характеристики предыдущего и текущего кадров, определяют разности отношений двух соседних кадров и сравнивают полученную разность с порогом, принимая решение о появлении объекта в текущем кадре изображения. 1 ил.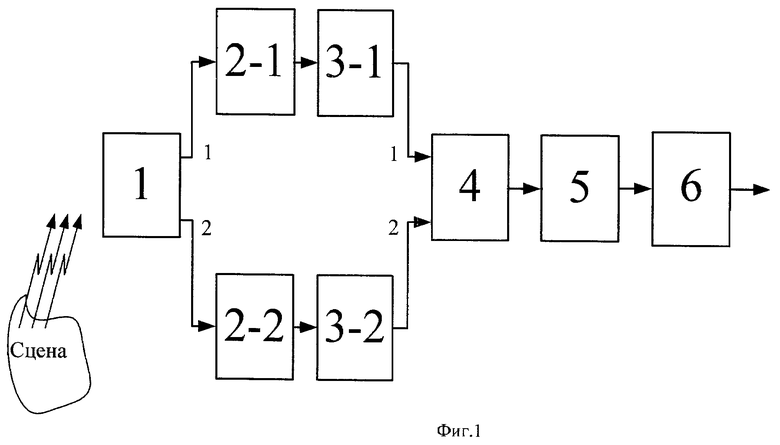
Способ обнаружения появления объектов на изображениях, основанный на измерении характеристик разности двух соседних кадров видеопоследовательности, сравнении с порогом и принятии решения о появлении объекта на изображении, отличающийся тем, что из получаемой видеокамерой видеопоследовательности, инициализируют соседние кадры - предыдущий и текущий в моменты времени tk и tk+1 соответственно, из полученных кадров вычитают постоянную составляющую (среднее значение яркости кадров), измеряют энергетический спектр данных кадров и представляют в виде Sпр-матрицы предыдущего и Sтек-матрицы текущего кадров, каждая размерностью q×q, где  , Q - количество коэффициентов разложения энергетического спектра изображения в двумерный ряд Фурье по косинусам, определяют характеристики δ2 и δ3 как отношение главных миноров Sпр-матрицы предыдущего и Sтек-матрицы текущего кадров, определяют разности отношений соответствующих главных миноров для двух соседних кадров и сравнивают полученную разность с порогом, принимая решение об обнаружении появления объекта в текущем кадре изображения.
, Q - количество коэффициентов разложения энергетического спектра изображения в двумерный ряд Фурье по косинусам, определяют характеристики δ2 и δ3 как отношение главных миноров Sпр-матрицы предыдущего и Sтек-матрицы текущего кадров, определяют разности отношений соответствующих главных миноров для двух соседних кадров и сравнивают полученную разность с порогом, принимая решение об обнаружении появления объекта в текущем кадре изображения.
| УСТРОЙСТВО ДЛЯ НАБЛЮДЕНИЯ БИОЛОГИЧЕСКИХ ОБЪЕКТОВ | 2006 |
|
RU2381737C2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ОБЪЕКТА НА ФОНЕ ЗВЕЗД | 1986 |
|
RU2081437C1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| US 7181050 В1, 20.02.2007. | |||

