Изобретение относится к области телевизионно-вычислительной техники и может быть использовано при построении интеллектуальных систем технического зрения для автоматического обнаружения и регистрации параметров движения объектов.
Известен способ обнаружения движения объектов на цифровом изображении, основанный на пошаговом определении векторов движения по серии изображений, при этом область кадра разбивается на равные квадратные блоки, размер которых зависит от размера изображения в пикселях, далее для первого кадра вычисление суммы квадратичных отклонений каждого блока. При вычислении среднеквадратичного отклонения блоков второго кадра производится обход некоторой окрестности блока в поиске максимального соответствия изображению блока на предыдущем кадре в пределах этой окрестности, чем меньше значение среднеквадратичного отклонения, тем больше похожи блоки, далее по одинаковым блокам формируются вектора движения (см. патент ЕР 1631073 B1, 26.03.2008, «Apparatus and methods for the detection of abnormal motion in a video stream»). Данный способ требует значительных вычислительных ресурсов, в связи с этим может применяться исключительно для сжатия видеопоследовательности (уменьшения избыточности) и сильно чувствителен к изменению яркости изображения, имеет низкую устойчивость к уроню шума.
Наиболее близким по технической сущности к заявленному способу является способ предлагаемому изобретению является способ анализа межкадровой разности (К.Фу, Р.Гонсалес, К.Ли. Робототехника /М.: Мир, 1989 г., с.423-426). Он заключается в определении изменений между двумя кадрами изображения, один из которых, имеющий стационарные компоненты, содержит эталонный объект, и в последующей пороговой обработке полученной разности, в результате которой выделяются пиксели изображения движущегося объекта. По полученному сегментированному изображению можно определить местонахождение и параметры движения объекта.
Недостатками данного способа является сложность обнаружить (зафиксировать) движение объекта и определить параметры его движения в случаях изменения освещенности в пределах границ объекта, высокого уровня шумов, например, при низкой освещенности, малых размеров или низкого контраста движущегося объекта.
Техническим результатом предлагаемого способа является повышение эффективности обнаружения движущихся объектов и определения параметров их движения в условиях низкой освещенности, в том числе малоконтрастных и малоразмерных объектов на сложном неоднородном фоне последовательности цифровых изображений.
Указанный технический результат достигается тем, что измеряют спектральные плотности видеопоследовательности двух кадров и фазоэнергетические характеристики последовательности трех кадров, определяют межкадровую разность спектральной плотности видеосигнала и попарную межкадровую разность фазоэнергетических характеристик взятой для трех кадров видеопоследовательности, на основе которых определяют параметры движения объекта, а именно координаты по одной межкадровой разности фазоэнергетических характеристик; направление движения объекта по сравнению хотя бы двух межкадровых разностей фазоэнергетических характеристик; контраст объекта относительно фона по сравнению значений межкадровых разностей фазоэнергетической характеристики и спектральной плотности; смещение объекта в пикселях по разности спектральной плотности значений, соответствующих максимальным фазам.
Сущность предлагаемого способа заключается в следующем:
в обнаружении движущихся объектов определении их координат по межкадровой разности фазоэнергетических характеристик. При движении объекта за счет участка смещения возникает декомпенсация фаз (фазоэнергетической характеристики). Значение фазы, при которой возникает декомпенсация - максимальная фаза, она характеризуется ярко выраженным максимумом или минимумом, после нулевых значений, соответствует границе объекта, наиболее удаленную от середины строки (столбца);
в определении направления перемещения, используя информацию о координатах объекта, по сравнению значений максимальных фаз разности фазоэнергетических (далее максимальная фаза) характеристик для последовательности трех кадров, в соответствии, если объект находится в левой части изображения и значение максимальной фазы уменьшилось, то объект перемещается вправо, значение максимальной фазы увеличилось объект перемещается влево, если объект находится в правой части изображения и значение максимальной фазы уменьшилось движется влево, в соответствии с фигурой 1;
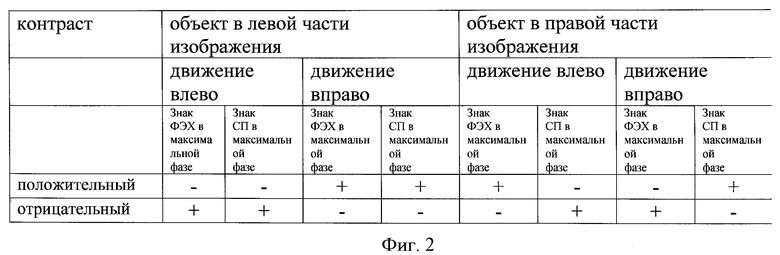
в определении контраста объекта относительно фона, используя определенные значения о координатах и направлении движения объекта, в соответствии с фигурой 2;
в определении перемещения объекта (в пикселях), используя информацию о координатах и направлении движения объекта, по анализу значений спектральной плотности, соответствующей максимальной фазе.
Способ может быть реализован следующей последовательностью действий:
- в базу данных (память) вводится три кадра видеопоследовательности, происходит выборка по строкам и столбцам (см. Андреев А.Л. Автоматизированные телевизионные системы наблюдения. Часть I/ СПб: СПбГУИТМО, 2005, с.14-17)
- далее измеряют построчно (по столбцам) спектральную плотность для первого и второго кадра (см. патент RU 2370780 от 20.10.2009, Богословский А.В., Богословский Е.А., Юдаков Д.С. Способ измерения параметров энергетического спектра двумерного сигнала);
- измеряют фазоэнергетические характеристики для трех кадров, которые содержат информацию как о пространственных, так и о частотных свойствах изображения (см. Богословский А.В., Жигулина И.В. Использование фазочастотных пространственных характеристик для оценки движения. - Успехи современной радиоэлектроники, 2009, №11 с.61-63);
- измеряют разность спектральной плотности;
- измеряют попарно межкадровую разность фазоэнергетических характеристик;
- на основе межкадровой разности фазоэнергетических характеристик определяют наличие в кадре движущегося объекта и его координаты по максимальной фазе (см. Богословский А.В., Жигулина И.В., Копылов О.Е., Яковлев В.А. Определение параметров движения объекта по изображению на основе межкадровых разностей частотных характеристик. - Радиотехника, 2010, №5, с.55-59);
- определяют направление движения по изменению значений максимальной фазы попарной разности взятой для трех кадров видеопоследовательности, в соответствии с фигурой 1;
- определяют контраст объекта относительно фона по знакам в максимальной фазе разности фазоэнергетической характеристики и спектральной плотности в соответствии с фигурой 2;
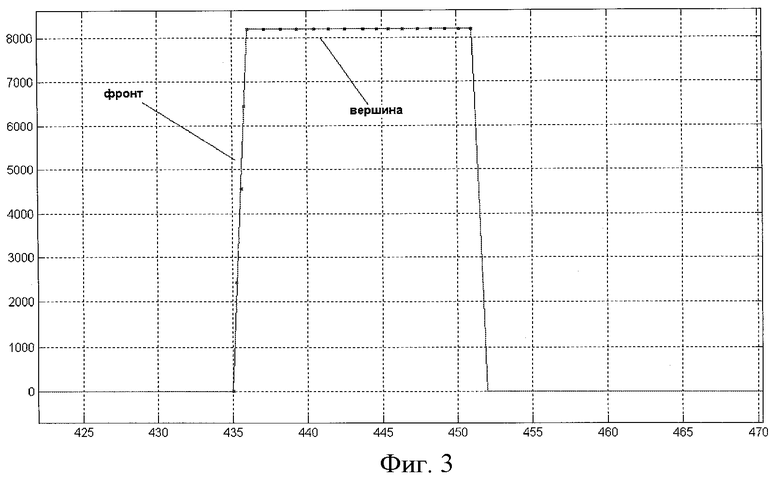
- определяют смещение объекта (в пикселях) по измерению величины фронта «всплеска» разности спектральной плотности, соответствующего максимальной фазе, в соответствии с фигурой 3;
- вывод о правильном обнаружении интересующего объекта осуществляется человеком (оператором).
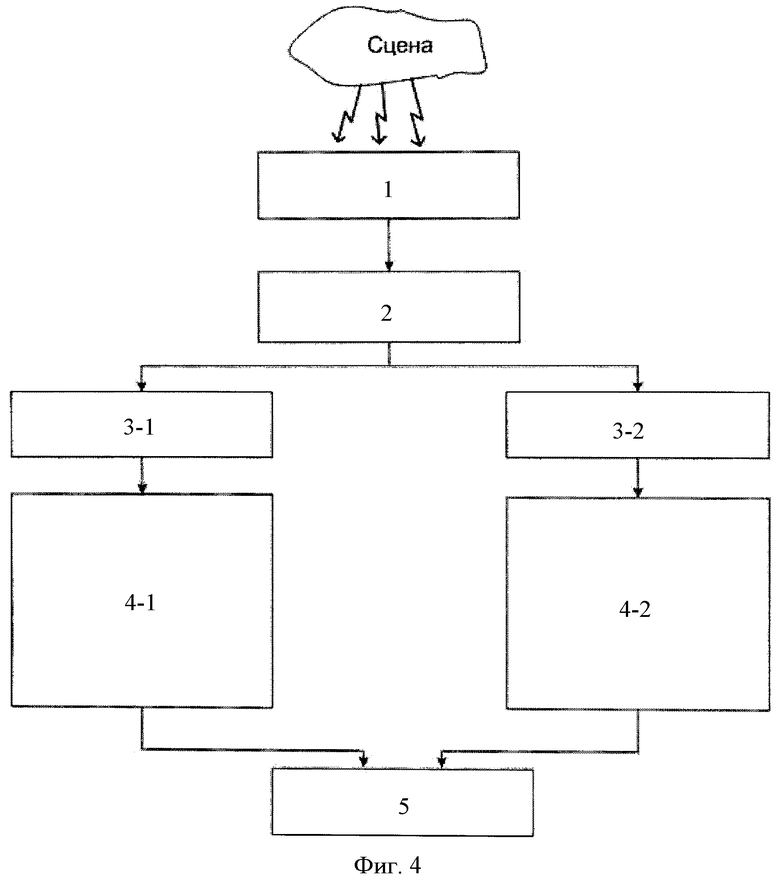
Способ может быть реализован, например, с помощью устройства, структурная схема которого представлена на фигуре 4, где обозначены:
1 - система формирования входного изображения;
2 - буферное устройство;
3-1 - выборка по строкам;
3-2 - выборка по столбцам;
4-1 - блок анализа по строкам;
4-2 - блок анализа по столбцам;
5 - оператор
1) последовательность изображений реальной сцены, содержащих искомый движущийся объект, поступает на блок 1;
2) далее цифровая последовательность изображений, в виде значений яркостей пикселей с выхода блока 1 подается на вход блока 2, где осуществляется запись в память кадра в виде строк и столбцов трех кадров видеопоследовательности;
3) с выхода блока 2 кадры видеопоследовательности одновременно поступают на входы блоков 3 и 4, где, соответственно, формируются выборки по строкам и столбцам;
4) с выходов блоков 3-1 и выборка по строкам поступает в блоки 4-1, с выхода блока 3-2 выборка по столбцам изображения поступает на вход блока 4-2;
5) в блоке 4-1 происходит запоминание трех последовательных кадров построчно, измерение для каждой строки фазоэнергетической характеристики и спектральной плотности, определение межкадровой разности, на основе которых определяется местоположение объекта и характеристики движения (может быть реализован, например, с помощью процессора для цифровой обработки сигналов);
6) в блоке 4-2 происходят аналогичные операции, что и в блоке 4-1; только для столбцов видеопоследовательности;
7) блок 5 оператор принимает решение об обнаружении объектов.
Применение данного способа поиска позволит повысить вероятность правильного обнаружения движения объектов на последовательности цифровых изображениях, обладающих сложным неоднородным фоном, в условиях высокого уровня шумов.
Проведенный заявителями анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации и выявлению источников, содержащих сведения об аналогах изобретения, позволил установить, что заявители не обнаружили аналогов, характеризующихся признаками, тождественными всем существенным признакам изобретения.
Следовательно, заявленное изобретение "Способ обнаружения движущихся объектов и определения их параметров" соответствует критерию «новизна».
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЕГМЕНТАЦИИ ИЗОБРАЖЕНИЯ | 2014 |
|
RU2557484C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2011 |
|
RU2461067C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРА ДВИЖЕНИЯ ОБЪЕКТА НА КАДРАХ ВИДЕОПОСЛЕДОВАТЕЛЬНОСТИ | 2019 |
|
RU2737343C2 |
| Способ помехоустойчивого обнаружения дыма и пламени в сложной фоно-световой обстановке | 2021 |
|
RU2760921C1 |
| СПОСОБ ПОИСКА И РАСПОЗНАВАНИЯ ОБЪЕКТОВ НА ЦИФРОВЫХ ИЗОБРАЖЕНИЯХ | 2011 |
|
RU2458397C1 |
| Способ преобразования изображения дыма и пламени | 2019 |
|
RU2707416C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОКАЗАТЕЛЕЙ (ХАРАКТЕРИСТИК) ТОЛЩИНЫ, ЗАСОРЕННОСТИ И ВОРСИСТОСТИ ТЕКСТИЛЬНЫХ НИТЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2575777C2 |
| Система сопровождения подвижных объектов на видео | 2022 |
|
RU2807953C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЯ ОБЪЕКТА | 2003 |
|
RU2243591C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ЦИФРОВОГО СИГНАЛА ИЗОБРАЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2287909C2 |
Изобретение относится к области телевизионно-вычислительной техники. Техническим результатом является повышение эффективности обнаружения движущихся объектов и определения параметров их движения в условиях низкой освещенности, в том числе малоконтрастных и малоразмерных объектов на сложном неоднородном фоне последовательности цифровых изображений. При движении объекта за счет участка смещения возникает декомпенсация фаз (фазоэнергетической характеристики). Значение фазы, при которой возникает декомпенсация - максимальная фаза, она характеризуется ярко выраженным максимумом или минимумом, после нулевых значений, соответствует границе объекта, наиболее удаленную от середины строки (столбца); в определении направления перемещения, используя информацию о координатах объекта, по сравнению значений максимальных фаз разности фазоэнергетических (далее максимальная фаза) характеристик для последовательности трех кадров; в определении контраста объекта относительно фона, используя определенные значения о координатах и направлении движения объекта; в определении перемещения объекта (в пикселях), используя информацию о координатах и направлении движения объекта, по анализу значений спектральной плотности, соответствующей максимальной фазе. 4 ил.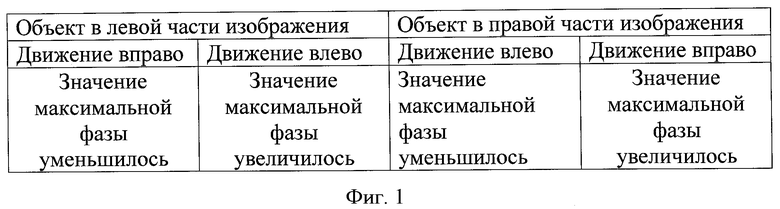
Способ обнаружения движущихся объектов и определения их параметров, основанный на формировании видеосигнала изображения, запоминания последовательности кадров и получении межкадровых разностей, отличающийся тем, что измеряют спектральные плотности видеопоследовательности двух кадров и фазоэнергетические характеристики последовательности трех кадров, определяют межкадровую разность спектральной плотности видеосигнала и попарную межкадровую разность фазоэнергетических характеристик взятой для трех кадров видеопоследовательности, на основе которых определяют параметры движения объекта, а именно: координаты по одной межкадровой разности фазоэнергетических характеристик; направление движения объекта по сравнению хотя бы двух межкадровых разностей фазоэнергетических характеристик; контраст объекта относительно фона по сравнению значений межкадровых разностей фазоэнергетической характеристики и спектральной плотности; смещение объекта в пикселях по разности спектральной плотности значений, соответствующих максимальным фазам.
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИСПОЛЬЗОВАНИЯ СПОСОБОВ ПРЕОБРАЗОВАНИЯ КАДРОВ С ПОВЫШЕНИЕМ ЧАСТОТЫ КАДРОВ ПРИ КОДИРОВАНИИ МАСШТАБИРУЕМОГО ВИДЕО | 2005 |
|
RU2370909C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕКТОРОВ ДВИЖЕНИЯ ДЛЯ ТЕКУЩЕГО БЛОКА В КАДРЕ, ПОДЛЕЖАЩЕМ ДЕКОДИРОВАНИЮ | 2006 |
|
RU2360375C2 |
| СИСТЕМА КОДИРОВАНИЯ ВИДЕОДАННЫХ И СИСТЕМА ДЕКОДИРОВАНИЯ ВИДЕОДАННЫХ | 2004 |
|
RU2341911C2 |
| WO 2005122592 A1, 22.12.2005 | |||
| US 20080284871 A1, 20.11.2008. | |||

