Изобретение относится к области научного приборостроения и может быть использовано для получения топографии проводящих поверхностей, для изучения физико-технологических свойств твердых тел, а также для распознавания исследуемых нанообъектов на подложке.
Известен сканирующий туннельный микроскоп [А.с. 1531181, МКИ H01J 37/20. А.П.Володин, В.С.Эдельман. Сканирующий туннельный микроскоп], содержащий корпус, трубчатый пьезоэлемент, держатель измерительной иглы, держатель образца и систему управления.
Недостатками устройства являются его низкие функциональные возможности, быстродействие и точность, обусловленные отсутствием средств адаптации к условиям эксперимента и средств распознавания изображений нанообъектов.
Известно устройство для исследования топографии проводящей поверхности [А.с. 1709429, H01J 37/285. Д.Г.Соболев, А.Н.Косяков, С.А.Герасимов. Устройство для исследования топографии проводящей поверхности], содержащее пьезоэлектрическую треногу с управляющими электродными системами для привода острия по осям X, Y, Z, а также блоки измерения туннельного тока, управления туннельным промежутком, регистрации топографии, усилитель напряжения, коммутатор и блок компенсации.
Недостатками устройства являются его низкие быстродействие и высокая чувствительность к внешним вибрациям, определяемые использованием в качестве пьезодвигателя острия - пьезотреноги, имеющей низкие собственные резонансные частоты. Кроме того, низкие функциональные возможности, быстродействие и точность обуславливаются отсутствием средств адаптации к условиям эксперимента и средств распознавания изображений наночастиц.
Известны метод и устройство для распознавания изображений [Timothy L. Hutcheson, Wilson Or, Venkatesh Narayanan, Peter G. Wohlmut, Ramanujam Srinivasan, Bobby R. Hunt, Thomas W. Ryan. Pattern Recognition System // United States Patent. №5465308. - 1995], содержащее блок предварительной обработки двумерных изображений с помощью преобразования Фурье, блок хранения эталонных изображений после преобразования, блок распознавания на основе нейронных сетей.
Недостатком метода и устройства являются низкие функциональные возможности, обусловленные отсутствием аппаратных средств для получения изображений нанообъектов, и низкая точность распознавания изображений (определяемая использованием только одного метода распознавания - аппарата нейронных сетей).
Известны метод и устройство для распознавания пространственных изображений [Michael G. Mclntyre, James E. Morris. Universal Spatial Pattern Recognition System // United States Patent. US 710687 B1. - 2006], содержащее блок обработки и нормализации изображений полупроводниковых пластин, блок хранения образцовых изображений, блок распознавания на основе вычисления корреляционной функции набора образцовых изображений и полученного изображения полупроводниковой пластины.
Недостатком метода и устройства являются низкие функциональные возможности, обусловленные отсутствием аппаратных средств для получения изображений нанообъектов, низкая точность распознавания (определяемая применением только одного метода распознавания - корреляционного анализа).
Известен сканирующий туннельный микроскоп [Патент РФ №2296387, МКИ H01J 37/285. А.М.Липанов, Е.Ю.Шелковников, П.В.Гуляев и др. Сканирующий туннельный микроскоп (прототип)], содержащий съемный точный пьезопривод для перемещения измерительного острия по осям X, Y, Z относительно поверхности образца, шаговый пьезопривод сближения образца с острием, блок измерения туннельного тока, блок регистрации топографии исследуемой поверхности с управляющим вычислителем, блок компенсации пульсаций напряжения, коммутатор, высоковольтные усилители напряжения по осям X, Y, Z, блок адаптивного управления, фильтр низких частот, сумматор, цифроаналоговый преобразователь точного управления туннельным промежутком, два цифроаналоговых преобразователя для управления X, Y электродами. Точный пьезопривод состоит из коаксиально расположенных и соединенных торцами внешней пьезотрубки для привода острия по осям X, Y и внутренней пьезотрубки для привода острия по оси Z, при этом управляющая электродная система по оси Z выполнена в виде трех последовательно расположенных изолированных друг от друга электродов, из них расположенный ближе к острию электрод соединен с выходом цифроаналогового преобразователя точного управления туннельным промежутком, электрод минимальной протяженности соединен с выходом блока компенсации пульсаций напряжения, электрод максимальной протяженности соединен с входом блока компенсации пульсаций напряжения и выходом высоковольтного усилителя напряжения по оси Z.
К недостаткам устройства следует отнести недостаточные функциональные возможности и точность устройства, которые обуславливаются отсутствием средств распознавания нанообъектов, а также высоким уровнем шумов на СТМ-изображениях.
Задача изобретения состоит в создании интеллектуального сканирующего туннельного микроскопа, который обеспечивает расширение функциональных возможностей за счет автоматического обнаружения (путем выделения структурных элементов нанообъектов на основе сегментации по кривизне СТМ-профилограмм) и распознавания СТМ-изображений нанообъектов с повышенной надежностью, обеспечиваемой использованием двух методов распознавания (аппарата нейронных сетей и нечеткой логики), а также посредством уменьшения шумов на СТМ-изображениях и приостановки измерений на периоды времени с повышенным виброакустическим фоном (путем введения системы активной виброзащиты).
Задача решается тем, что в сканирующем туннельном микроскопе, содержащем острие, съемный точный пьезопривод острия по осям X, Y, Z, держатель образца с шаговым пьезоприводом его сближения с острием, блок измерения туннельного тока, блок регистрации топографии исследуемой поверхности с управляющим вычислителем, блок компенсации пульсаций напряжения, высоковольтные усилители напряжения по осям X, Y, Z, коммутатор, блок адаптивного управления, цифроаналоговый преобразователь термокомпенсации, фильтр низких частот, сумматор, цифроаналоговый преобразователь точного управления туннельным промежутком, а также два цифроаналоговых преобразователя управления X, Y-электродами внешней пьезотрубки съемного точного пьезопривода, введены блок автоматического обнаружения и распознавания наночастиц, соединенный через шину данных с блоком регистрации топографии исследуемой поверхности, управляющим вычислителем и блоком адаптивного управления, а также система активной виброзащиты, содержащая магнит, магнитопровод, подвижную катушку, датчик ускорения, упругую мембрану, усилитель сигналов виброзащиты, вход которого соединен с датчиком ускорения, а выход - с входом аналого-цифрового преобразователя, выход которого подключен к одному из входов сигнального процессора, соответствующий выход которого через цифроаналоговый преобразователь и усилитель подсоединен к подвижной катушке системы активной виброзащиты.
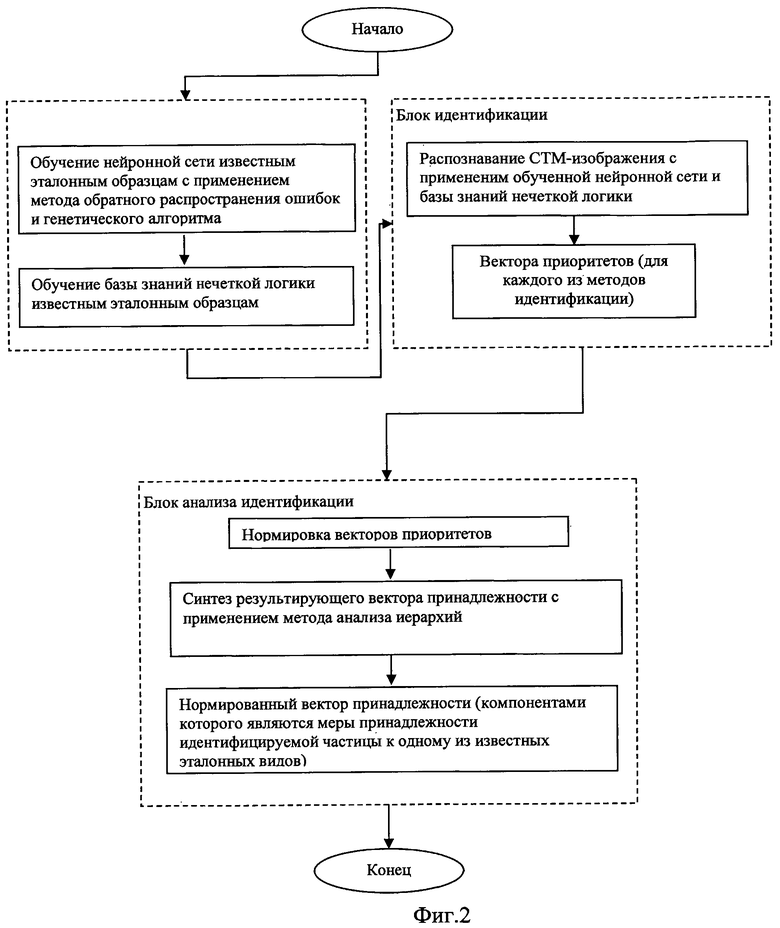
На фиг.1 изображена структурная схема сканирующего туннельного микроскопа, на фиг.2 - поясняющий принцип его работы алгоритм распознавания нанообъектов.
Сканирующий туннельный микроскоп содержит съемный точный пьезопривод 1 для перемещения измерительного острия 2 по осям X, Y, Z относительно поверхности образца 3, шаговый пьезопривод 4 сближения образца с острием, блок 5 измерения туннельного тока, блок 6 регистрации топографии исследуемой поверхности с управляющим вычислителем, блок компенсаций 7 пульсаций напряжения, коммутатор 8, высоковольтный усилитель 9 напряжения по оси Z, блок 10 адаптивного управления, второй и третий выходы которого через соответствующие второй и третий каналы коммутатора 8, систему активной виброзащиты 11, блок автоматического обнаружения и распознавания наночастиц 12, два цифроаналоговых преобразователя 13, 14 и два высоковольтных усилителя 15, 16 подсоединены к X, Y электродам внешней пьезотрубки съемного точного пьезопривода 1, который состоит из коаксиально расположенных и соединенных торцами внешней пьезотрубки для привода острия 2 по осям X, Y и внутренней пьезотрубки для привода острия по оси Z, при этом управляющая электродная система по оси Z выполнена в виде трех последовательно расположенных изолированных друг от друга электродов 17, 18, 19, из них расположенный ближе к острию электрод 17 соединен с выходом цифроаналогового преобразователя 20 точного управления туннельным промежутком через первый канал коммутатора 8, электрод 18 минимальной протяженности соединен с выходом блока 7 компенсации пульсаций напряжения через четвертый канал коммутатора, электрод 19 максимальной протяженности соединен с входом блока 7 компенсации пульсаций напряжения и выходом высоковольтного усилителя 9 напряжения по оси Z. Вход усилителя 9 подключен к выходу сумматора 21, первый вход которого через фильтр низких частот 23 и цифроаналоговый преобразователь 22 термокомпенсации соединен с седьмым выходом блока адаптивного управления 10, а второй - через пятый канал коммутатора с четвертым выходом блока 10. Пятый выход блока 10 соединен с Z-электродами шагового пьезопривода 4, а шестой - с первым входом блока 5 измерения туннельного тока, первый выход которого подключен к первому электроду (образцу 3) туннельного промежутка, второй игольчатый электрод 2 которого соединен со вторым входом блока 5 измерения туннельного тока, второй выход которого подключен к первому входу блока 10 адаптивного управления, второй вход которого соединен с шиной обмена данными блока 6 регистрации топографии исследуемой поверхности с управляющим вычислителем.
Блок 5 измерения туннельного тока включает преобразователь 24 ток-напряжение, аналого-цифровой преобразователь 25, цифроаналоговый преобразователь 26 и высоковольтный усилитель 27 туннельного напряжения, выход которого является первым выходом блока 5 измерения туннельного тока, а вход подключен к выходу цифроаналогового преобразователя 26, вход которого является первым входом блока 5 измерения туннельного тока, второй вход которого является входом преобразователя 24 ток-напряжение, выход которого подсоединен к входу аналого-цифрового преобразователя 25, выход которого является вторым выходом блока 5 измерения туннельного тока.
Блок 10 адаптивного управления включает цифроаналоговый преобразователь 28, блок 29 адаптивного сближения образца 3 с острием 2 и сигнальный процессор 30, первый, третий, шестой, седьмой и восьмой выходы которого являются соответственно первым, третьим, шестым, седьмым и восьмым выходами блока 10 адаптивного управления, четвертый выход которого является выходом цифроаналогового преобразователя 28, вход которого подключен к четвертому выходу сигнального процессора 30, пятый выход которого соединен с входом блока 29 адаптивного сближения образца 3 с острием 2, выход которого является пятым выходом блока 10 адаптивного управления, первый и второй входы которого являются соответственно первым и вторым входом сигнального процессора 30. Коммутатор 8 представляет собой многоканальный электронный коммутатор, управляемый сигнальным процессором и реализующий работу сканирующего туннельного микроскопа в трех режимах: грубого и точного цифрового регулирования, а также заострения острия 2.
Система активной виброзащиты 11 включает магнит 31, основание 32, магнитопровод 33, подвижную катушку 34, установленную на датчике ускорения 35, упругую мембрану 36, усилитель сигналов виброзащиты 37, вход которого соединен с датчиком ускорения 35, а выход - с входом аналого-цифрового преобразователя 38, выход которого подключен к третьему входу сигнального процессора 30, восьмой выход которого через цифроаналоговый преобразователь 39 и усилитель 40 подсоединен к подвижной катушке 34 системы виброзащиты.
Блок автоматического обнаружения и распознавания 12 наночастиц подключен к шине данных, соединяющей сигнальный процессор 30 с блоком 6 регистрации топографии с управляющим вычислителем.
Сканирующий туннельный микроскоп работает следующим образом. Для сближения образца 3 с острием 2 до возникновения туннельного тока используется шаговый пьезопривод 4. После сближения острия 2 и образца 3 и установления заданного туннельного тока сканирующий туннельный микроскоп может работать в трех режимах. В первом режиме основной контур автоматического регулирования (цифровой отрицательной обратной связи) образуют: образец 3, туннельный промежуток, острие 2, блок 5 измерения туннельного тока, сигнальный процессор 30 и цифроаналоговый преобразователь 28 блока 10 адаптивного управления, сумматор 21, высоковольтный усилитель 9 напряжения по оси Z и электрод 19 точного пьезопривода 1. При работе цифровой отрицательной обратной связи напряжение с выхода преобразователя 24 ток-напряжение (пропорциональное величине туннельного тока) поступает через аналого-цифровой преобразователь 25 в сигнальный процессор 30, где происходит его сравнение с заданным уровнем стабилизации, и, с учетом предшествующих отсчетов аналого-цифрового преобразователя 25, изменяется напряжение на выходе цифроаналогового преобразователя 28, задающее напряжение на электроде 19 пьезопреобразователя 1. Задание весовых множителей позволяет легко модифицировать тип моделируемого программой сигнального процессора 30 закона управления и подбирать оптимальную передаточную функцию цифровой отрицательной обратной связи.
Данный режим позволяет «осматривать» большие площади со значительными перепадами высот рельефа исследуемой поверхности образца 3, но при этом разрешение вдоль координаты Z составляет несколько нанометров. Этот режим предназначен для начального исследования поверхности. Получив начальное топографическое изображение поверхности, можно выбрать нужный для исследования ее участок и перейти на второй режим точного регулирования. В этом режиме работают два электрода 17 и 19, причем управляющее напряжение на электроде 19 изменяет положение острия 2, если управляющее напряжение, подаваемое на электрод 17, выходит за заданные пределы точного регулирования, которые оцениваются вычислителем 6 с выхода сигнального процессора 30. Контур цифрового точного автоматического регулирования образуют: образец 3, туннельный промежуток, острие 2, блок 5 измерения туннельного тока, сигнальный процессор 30, цифроаналоговый преобразователь 20 точного управления туннельным промежутком, электрод 17 точного пьезопривода 1. Использование блока 7 компенсации пульсаций напряжения и второго электрода 18 на пьезоэлементе координаты Z компенсирует перемещения острия 2, вызванные пульсациями и возмущениями выходного напряжения высоковольтного усилителя 9 по оси Z, подаваемого на электрод 19, под действием нестабильности источников питания и внешних возмущающих воздействий.
При работе в первых двух режимах имеется возможность компенсировать температурные дрейфы микроскопа (как в прототипе). Компенсация термодрейфа в плоскости X, Y образца обеспечивается осесимметричной конструкцией точного и шагового пьезоприводов. Роль точного компенсатора термодрейфа острия по оси Z выполняет дополнительная цепь регулирования туннельного промежутка, образованная сигнальным процессором 30, цифроаналоговым преобразователем термокомпенсации 22, фильтром низких частот 23, сумматором 21 и усилителем 9.
Для сокращения времени получения изображения поверхности образца 3 и повышения производительности туннельного микроскопа в данном устройстве использована нелинейная адаптивная развертка с прогнозированием Z-координаты в точке измерений. Для расширения интеллектуальных возможностей микроскопа используются алгоритмы прогнозирования с высокими адаптационными свойствами [Липанов A.M., Шелковников Ю.К., Гафаров М.Р. и др. Применение аппарата прогнозирования в сканирующих устройствах растрового типа // Приборы и системы: управление контроль диагностика. - №7. - 2010. - С.59-64]. Данные алгоритмы обеспечивают высокую точность прогноза при изменении характера рельефа поверхности за счет формирования упреждающих сигналов управления на базе полученных прогнозных оценок. Прогнозирование позволяет реализовать прямой канал управления и повысить скорость отработки сигналов за счет исключения времени прохождения сигнала через объект регулирования и цепь обратной связи.
Автоматическое обнаружение и распознавание СТМ-изображений наночастиц осуществляется следующим образом. Полученное в режиме грубого сканирования с невысоким пространственным разрешением СТМ-изображение с выхода сигнального процессора 30 передается в блок автоматического обнаружения и распознавания 12, в котором осуществляется обнаружение наночастиц путем выделения ее структурных элементов на основе сегментации по кривизне профилограмм СТМ-изображения, при этом вычисляются геометрические параметры частицы - ее центр и радиус. Полученные данные передаются в сигнальный процессор 30 и СТМ автоматически переходит в режим точного сканирования с высоким пространственным разрешением и с распознаванием обнаруженных наночастиц. Полученные в этом режиме СТМ-изображения наночастиц передаются в блок автоматического обнаружения и распознавания 12, где производится распознавание наночастиц с использованием аппарата нейронных сетей и нечеткой логики. В случае несоответствия полученных результатов распознавания заданным критериям осуществляется повторное сканирование выбранной наночастицы и ее распознавание. При этом СТМ используется в многокадровом режиме с перекрытием, в котором производится автоматическая координатная привязка зондирующего острия к системе координат, в которой снимались предыдущие кадры [Шелковников Ю.К., Гафаров М.Р., Гуляев П.В., Тюриков А.В., Кизнерцев С.Р. Построение изображений поверхности при многокадровом режиме сканирующего туннельного микроскопа // Химическая физика и мезоскопия. - 2008. - Т.10. - №4. - С.514-520].
При использовании аппарата нейронных сетей реализуется нейронная сеть с многослойной структурой, в которой каждый нейрон произвольного слоя связан со всеми выходами нейронов предыдущего слоя или, в случае первого слоя, со всеми входами нейронной сети. Для обучения нейронной сети применяются такие методики, как методика обратного распространения ошибок и генетический алгоритм, после чего на выделенных участках СТМ-изображений, соответствующих наночастице, осуществляется ее начальная идентификация. Результат распознавания представляется в виде вектора приоритетов, компонентами которого (после проведения нормировки) являются меры принадлежности распознаваемой частицы к одному из эталонных видов. [Головко В.А. Нейронные сети: обучение, организация и применение, М.: ИПР-ЖР, 2001 - с.28-57; Robbins P.; Soper A. and Rennolls К. Use of genetic algorithms for optimal topology determination in back propagation neural networks // Proceedings of the International Conference on Artificial Neural Nets and Genetic Algorithms. - Vienna: Springer, 1993 - p.726-730].
При применении аппарата нечеткой логики процесс идентификации распадается на четыре этапа. На первом этапе «фаззификации» вводится нечеткость на основе определения значений функций принадлежности для каждой из четких входных переменных, в качестве которых использованы значения высот дискретизированной СТМ-топографии локализованной наночастицы. На втором этапе «логического вывода» находятся «уровни отсечения» функций принадлежности выходных переменных (выражающих интегральную степень «схожести» экспериментального и эталонного изображений наночастиц), после чего формируются нечеткие подмножества. На третьем уровне «композиции» все нечеткие подмножества объединяются в единое нечеткое множество с помощью операций максимума или сложения. На четвертом этапе «дефаззификации» набор нечетких выводов преобразуется в четкое число и осуществляется начальная идентификация наночастицы. Результаты распознавания (также, как и при применении нейронной сети) представляются в виде вектора приоритетов, подлежащего нормировке. [Заде Л. Понятие лингвистической переменной и ее применение к принятию приближенных решений. - М.: Мир, 1976. - 165 с.; Круглов В.В., Дли М.И., Голубов Р.Ю. Нечеткая логика и искусственные нейронные сети. - М.: Издательство Физико-математической литературы, 2001. - 224 с.].
Для окончательной идентификации СТМ-изображений наночастицы с применением аппарата нейронный сетей и нечеткой логики (синтеза обобщенного вектора принадлежности) использован метод анализа иерархий, широко применяемый в автоматизированных системах принятия решений. В соответствии с данным методом строится трехуровневая иерархия вида: уровень I - «результат распознавания»; уровень II - «применяемые методы» (нейронная сеть и аппарат нечеткой логики); уровень III - «возможные альтернативы» (эталонные образцы, имеющиеся в базе знаний). Для успешного применения метода анализа иерархий необходим вектор приоритетов используемых методов на уровне 2, который представляет собой численный результат сравнения применяемых методов распознавания. Компонентами данного вектора являются меры достоверности (точности) распознавания наночастиц при использовании каждого из методов, с последующим выполнением нормировки. Для синтеза обобщенного вектора принадлежности (компонентами которого являются меры принадлежности идентифицируемой частицы к одному из известных эталонных видов) выполняется усреднение соответствующих компонентов векторов приоритетов (полученных на этапах распознавания с применением нейронной сети и аппарата нечеткой логики) с весами-компонентами вектора приоритетов методов распознавания и с последующим выполнением нормировки. [Саати Т.Л. Принятие решений при зависимостях и обратных связях: Аналитические сети. - М.: Издательство ЛКИ, 2008. - 360 с.; Саати Т.Л. Принятие решений. Метод анализа иерархий. - М.: Радио и связь, 1989. - 316 с.]
С целью уменьшения помех на СТМ-изображений и, как следствие, для повышения эффективности автоматического распознавания наночастиц введена активная система виброзащиты 11 мембранного типа, содержащая мощный магнит 31, вмонтированный в основание 32, которое совместно с магнитопроводом 33 концентрирует магнитный поток в его зазоре. Подвижная катушка 34, расположенная в зазоре, связана с датчиком ускорения 35 и с жестким центром закрепленной на опоре основания 32 упругой мембраны 36, на которой установлена измерительная головка СТМ. Цифровая обратная связь системы активной виброзащиты 11 образована датчиком ускорения 35, усилителем 37, аналого-цифровым преобразователем 38, сигнальным процессором 30, цифроаналоговым преобразователем 39, усилителем 40 и подвижной катушкой 34. Сигнал с датчика ускорения 35 через усилитель 37, аналого-цифровой преобразователь 38 поступает в сигнальный процессор 30 для фильтрации и формирования управляющего сигнала. Далее этот сигнал через цифроаналоговый преобразователь 39 и усилитель 40 подается в подвижную катушку 34, осуществляющую при протекании через нее электрического тока линейные перемещения и подавление виброакустических помех, оценки уровня вибраций. Кроме того, применение сигнального процессора в системе активной виброзащиты позволяет для повышения надежности распознавания осуществлять интеллектуальное управление измерениями, оценивая уровень помех и приостанавливая СТМ-измерения на периоды времени с повышенным виброакустическим фоном.
В третьем режиме работы микроскопа осуществляется процесс заострения измерительной иглы (как в прототипе), при этом проверка качества острия иглы может реализоваться двумя способами: по контролю спада туннельного тока или путем сравнения токов полевой эмиссии через калибрующий туннельный зазор. После обнаружения затупления иглы осуществляется операция очистки и заострения острия иглы с применением методов полевой диффузии и полевого испарения.
Предложенный интеллектуальный сканирующий туннельный микроскоп обеспечивает расширение функциональных возможностей за счет автоматического обнаружения (путем выделения структурных элементов нанообъектов на основе сегментации по кривизне СТМ-профилограмм) и распознавания СТМ-изображений нанообъектов с повышенной надежностью, обеспечиваемой использованием двух методов распознавания (аппарата нейронных сетей и нечеткой логики), а также посредством уменьшения шумов на СТМ-изображениях и приостановки измерений на периоды времени с повышенным виброакустическим фоном (путем введения системы активной виброзащиты).
| название | год | авторы | номер документа |
|---|---|---|---|
| СКАНИРУЮЩИЙ ТУННЕЛЬНЫЙ МИКРОСКОП | 2005 |
|
RU2296387C1 |
| СКАНИРУЮЩИЙ ТУННЕЛЬНЫЙ МИКРОСКОП | 2002 |
|
RU2218629C2 |
| ЭЛЕКТРОХИМИЧЕСКИЙ СКАНИРУЮЩИЙ ТУННЕЛЬНЫЙ МИКРОСКОП | 2016 |
|
RU2638941C1 |
| СПОСОБ ФОРМИРОВАНИЯ ОБРАЗНОГО ИЗОБРАЖЕНИЯ ПОВЕРХНОСТИ НАНООБЪЕКТА В СКАНИРУЮЩЕМ ТУННЕЛЬНОМ МИКРОСКОПЕ | 2013 |
|
RU2555492C2 |
| КОМБИНИРОВАННЫЙ СКАНИРУЮЩИЙ ТУННЕЛЬНЫЙ МИКРОСКОП - РАСТРОВЫЙ ЭЛЕКТРОННЫЙ МИКРОСКОП | 1994 |
|
RU2089968C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ИДЕНТИФИКАЦИИ ОБРАЗЦА ПО УЧАСТКУ ЕГО ПОВЕРХНОСТИ | 1994 |
|
RU2044399C1 |
| Сканирующий туннельный микроскоп | 1990 |
|
SU1797149A1 |
| СПОСОБ УПРАВЛЯЕМОГО СИНТЕЗА, МОДИФИКАЦИИ И РАЗРУШЕНИЯ ЕДИНИЧНЫХ МЕТАЛЛООКСИДНЫХ НАНОСТРУКТУР В СОЧЕТАНИИ С КОНТРОЛЕМ ИХ СТРОЕНИЯ И СВОЙСТВ (ВАРИАНТЫ) | 2009 |
|
RU2397138C1 |
| СПОСОБ ИССЛЕДОВАНИЯ ПОВЕРХНОСТИ МИКРООБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1993 |
|
RU2092863C1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ И КОНТРОЛЯ ЗОНДОВ | 2006 |
|
RU2358239C2 |
Изобретение относится к области приборостроения. Технический результат заключается в расширении функциональных возможностей за счет автоматического обнаружения и распознавания СТМ-изображений нанообъектов с повышенной надежностью, обеспечиваемой использованием двух методов распознавания (аппарата нейронных сетей и нечеткой логики), а также посредством уменьшения шумов на СТМ-изображениях и приостановки измерений на периоды времени с повышенным виброакустическим фоном (путем введения системы активной виброзащиты). Указанный результат достигается тем, что в сканирующем туннельном микроскопе, содержащем острие, съемный точный пьезопривод острия по осям X, Y, Z, держатель образца с шаговым пьезоприводом его сближения с острием, блок измерения туннельного тока, блок регистрации топографии исследуемой поверхности с управляющим вычислителем, блок компенсации пульсаций напряжения, высоковольтные усилители напряжения по осям X, Y, Z, коммутатор, блок адаптивного управления, цифроаналоговый преобразователь термокомпенсации, фильтр низких частот, сумматор, цифро-аналоговый преобразователь точного управления туннельным промежутком, а также два цифроаналоговых преобразователя управления X, Y-электродами внешней пьезотрубки съемного точного пьезопривода, введены блок автоматического обнаружения и распознавания наночастиц, соединенный через шину данных с блоком регистрации топографии исследуемой поверхности, управляющим вычислителем и блоком адаптивного управления, а также система активной виброзащиты, содержащая магнит, магнитопровод, подвижную катушку, датчик ускорения, упругую мембрану, усилитель сигналов виброзащиты, вход которого соединен с датчиком ускорения, а выход - с входом аналого-цифрового преобразователя, выход которого подключен к одному из входов сигнального процессора, соответствующий выход которого через цифроаналоговый преобразователь и усилитель подсоединен к подвижной катушке системы активной виброзащиты. 2 ил.
Сканирующий туннельный микроскоп, содержащий острие, съемный точный пьезопривод острия по осям X, Y, Z, держатель образца, шаговый пьезопривод сближения образца с острием, блок измерения туннельного тока, блок регистрации топографии исследуемой поверхности с управляющим вычислителем, блок компенсации пульсаций напряжения, высоковольтные усилители напряжения по осям X, Y, Z, коммутатор, блок адаптивного управления, цифроаналоговый преобразователь термокомпенсации, фильтр низких частот, сумматор, цифроаналоговый преобразователь точного управления туннельным промежутком, а также два цифроаналоговых преобразователя управления X, Y-электродами внешней пьезотрубки съемного точного пьезопривода, отличающийся тем, что введены блок автоматического обнаружения и распознавания наночастиц, соединенный через шину данных с блоком регистрации топографии исследуемой поверхности, управляющим вычислителем и блоком адаптивного управления, а также система активной виброзащиты, содержащая магнит, магнитопровод, подвижную катушку, датчик ускорения, упругую мембрану, усилитель сигналов виброзащиты, вход которого соединен с датчиком ускорения, а выход - с входом аналого-цифрового преобразователя, выход которого подключен к одному из входов сигнального процессора, соответствующий выход которого через цифроаналоговый преобразователь и усилитель подсоединен к подвижной катушке системы активной виброзащиты.
| СКАНИРУЮЩИЙ ТУННЕЛЬНЫЙ МИКРОСКОП | 2005 |
|
RU2296387C1 |
| Сканирующий туннельный микроскоп | 1988 |
|
SU1531181A1 |
| ТУННЕЛЬНЫЙ МИКРОСКОП | 1992 |
|
RU2054740C1 |
| СКАНИРУЮЩИЙ ТУННЕЛЬНЫЙ МИКРОСКОП | 2002 |
|
RU2218629C2 |
| Устройство для измерения углов наклона обьектов | 1973 |
|
SU487300A1 |
| US 5465308 A, 07.11.1995. | |||

