ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к системе энергопитания для транспортного средства, электрически питаемому транспортному средству и устройству энергопитания для транспортного средства, а более точно к технологии для управления парковкой электрически питаемого транспортного средства, способного принимать энергию из устройства энергопитания, предусмотренного снаружи транспортного средства, бесконтактным образом по отношению к устройству энергопитания.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Выложенная патентная заявка Японии №9-215211 (патентный документ 1) раскрывает зарядную систему для электрического транспортного средства, способную к зарядке устройства накопления энергии электрического транспортного средства от источника питания вне транспортного средства бесконтактным образом, посредством электромагнитной связи первичной катушки, присоединенной к источнику питания вне транспортного средства, с вторичной катушкой, присоединенной к устройству накопления энергии транспортного средства. Эта зарядная система имеет вторичную катушку, установленную на нижней части кузова транспортного средства. Выемка сформирована в полу места парковки, с устройством перемещения катушки, подвижно поддерживающим первичную катушку, установленную в нем. Корпус устройства перемещения катушки снабжен тремя магнитными датчиками.
Для того чтобы заряжать устройство накопления энергии транспортного средства, транспортное средство паркуется над выемкой для возбуждения вторичной катушки. Следовательно, положение вторичной катушки детектируется магнитными датчиками. Затем устройство перемещения катушки приводится в действие на основании результата детектирования, чтобы наводить первичную катушку на положение, где обе катушки электромагнитно связаны друг с другом (см. патентный документ 1).
Передача энергии с использованием электромагнитной индукции, передача энергии с использованием микроволн и передача энергии посредством резонанса известны в качестве преобладающих технологий бесконтактной передачи энергии для передачи электрической энергии бесконтактным образом без использования шнура питания или кабеля передачи энергии.
Резонанс является технологией для побуждения пары резонаторов (например, пары саморезонансных катушек) резонировать друг с другом в электромагнитном поле (ближнем поле) для передачи электрической энергии бесконтактным образом через электромагнитное поле и может передавать большую электрическую мощность в несколько кВт на относительно длинном расстоянии (например, несколько метров) (см. непатентный документ 1).
Патентный документ 2: Выложенная патентная заявка Японии №11-1177.
Непатентный документ 1: Андре Курс и др. Wireless Power Transfer via Strongly Coupled Magnetic Resonances [online], Jul. 6, 2007, Science, Vol. 317, pp. 83-86, [searched on Sep. 12, 2007], Интернет-ссылка URL:http://www.sciencemag.org/cgi/reprint/317/5834/83.pdf.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Зарядная система, раскрытая в выложенной патентной заявке Японии №9-215211, описанной выше, имеет крупногабаритное оборудование, поскольку устройству перемещения катушки, подвижно поддерживающему первичную катушку, необходимо быть установленным на месте парковки. Для расширения использования транспортного средства, способного к приему электрической энергии от устройства энергопитания вне транспортного средства, в будущем требуется более простая конструкция системы.
Поэтому настоящее изобретение было выполнено, чтобы решить такие проблемы.
Задача настоящего изобретения состоит в том, чтобы предложить систему энергопитания для транспортного средства, имеющую простую конструкцию наряду с обеспечением точности парковки по отношению к устройству энергопитания, а также электрически питаемое транспортное средство и устройство энергопитания для транспортного средства, используемые в системе.
Согласно настоящему изобретению система энергопитания для транспортного средства для подачи электрической энергии из блока передачи энергии устройства энергопитания, установленного вне транспортного средства, в блок приема энергии, заключенный в транспортном средстве, бесконтактным образом включает в себя первое, и второе средство считывания, и первое, и второе средство управления наведением. Первое средство считывания считывает взаимное расположение между блоком передачи энергии и блоком приема энергии. Первое средство управления наведением управляет транспортным средством таким образом, чтобы транспортное средство наводилось на блок передачи энергии, на основании считанного результата первым средством считывания. Второе средство считывания считывает расстояние между блоком передачи энергии и блоком приема энергии на основании условия подачи электрической энергии из блока передачи энергии в блок приема энергии. Второе средство управления наведением управляет транспортным средством таким образом, чтобы положение блока приема энергии настраивалось на положение блока передачи энергии на основании считанного результата вторым средством считывания, когда транспортное средство находится в пределах расстояния от блока передачи энергии, предписанного первым средством управления наведением.
Предпочтительно блок передачи энергии размещен на земле. Блок приема энергии размещен на нижней части кузова транспортного средства. Площадь, где блок передачи энергии и блок приема энергии обращены друг к другу, является меньшей, чем площадь нижней части кузова транспортного средства. Первое средство считывания включает в себя устройство захвата изображения и блок распознавания изображения. Устройство захвата изображения заключено в транспортном средстве для захвата изображения извне транспортного средства. Блок распознавания изображения распознает положение блока передачи энергии на основании изображения, захваченного устройством захвата изображения. Предписанное расстояние является расстоянием, которое не позволяет устройству захвата изображения захватить изображение блока передачи энергии, когда транспортное средство приближается к блоку передачи энергии, и блок передачи энергии находится под кузовом транспортного средства.
Предпочтительно предписанное расстояние является предварительно определенным расстоянием, которое предоставляет блоку приема энергии возможность принимать электрическую энергию из блока передачи энергии.
Предпочтительно система энергопитания для транспортного средства дополнительно включает в себя средство связи. Средство связи проводит связь между транспортным средством и устройством энергопитания. Первое средство считывания дополнительно включает в себя светоизлучающий блок, указывающий положение блока передачи энергии. Светоизлучающий блок излучает свет после того, как связь между транспортным средством и устройством энергопитания установлена средством связи.
Кроме того, еще предпочтительно светоизлучающий блок излучает свет в ответ на команду, принятую из транспортного средства через средство связи.
Предпочтительно система энергопитания для транспортного средства дополнительно включает в себя средство связи. Средство связи проводит связь между транспортным средством и устройством энергопитания. Устройство энергопитания активизируется в ответ на команду, принятую из транспортного средства через средство связи.
Предпочтительно блок передачи энергии включает в себя катушку передачи энергии для приема электрической энергии из источника питания. Блок приема энергии включает в себя катушку приема энергии для приема электрической энергии из катушки передачи энергии бесконтактным образом. Второе средство считывания включает в себя блок оценки расстояния. Блок оценки расстояния оценивает расстояние между блоком передачи энергии и блоком приема энергии на основании информации об электрической энергии, переданной с катушки передачи энергии на катушку приема энергии.
Предпочтительно электрическая энергия, подаваемая из блока передачи энергии в блок приема энергии во время настройки положения блока приема энергии на положение блока передачи энергии вторым средством управления наведением, является меньшей, чем электрическая энергия, подаваемая из блока передачи энергии в блок приема энергии после завершения настройки.
Предпочтительно первое средство управления наведением включает в себя первый блок управления. Первый блок управления осуществляет рулевое управление транспортного средства на основании считанного результата первым средством считывания. Второе средство управления наведением включает в себя второй блок управления. Второй блок управления управляет приведением в движение и торможением транспортного средства на основании считанного результата вторым средством считывания.
Согласно настоящему изобретению электрически питаемое транспортное средство, способное к перемещению электроприводом, посредством использования электрической энергии, подаваемой из блока передачи энергии устройства энергопитания, установленного вне транспортного средства, включает в себя блок приема энергии, первый и второй блоки считывания, и первый, и второй блоки управления наведением. Блок приема энергии сконфигурирован для приема электрической энергии, переданной из блока передачи энергии, бесконтактным образом. Первый блок считывания считывает положение блока передачи энергии. Первый блок управления наведением управляет транспортным средством, таким образом, чтобы транспортное средство наводилось на блок передачи энергии, на основании считанного результата первым блоком считывания. Второй блок считывания считывает расстояние между блоком передачи энергии и блоком приема энергии на основании условия подачи электрической энергии из блока передачи энергии в блок приема энергии. Второй блок управления наведением управляет транспортным средством таким образом, чтобы положение блока приема энергии настраивалось на положение блока передачи энергии, на основании считанного результата вторым блоком считывания, когда транспортное средство находится в пределах расстояния от блока передачи энергии, предписанного первым блоком управления наведением.
Предпочтительно блок передачи энергии размещен на земле. Блок приема энергии размещен на нижней части кузова транспортного средства. Площадь, где блок передачи энергии и блок приема энергии обращены друг к другу, является меньшей, чем площадь нижней части кузова транспортного средства. Первый блок считывания включает в себя устройство захвата изображения и блок распознавания изображения. Устройство захвата изображения захватывает изображение наружной части транспортного средства. Блок распознавания изображения распознает положение блока передачи энергии на основании изображения, захваченного устройством захвата изображения. Предписанное расстояние является расстоянием, которое не позволяет устройству захвата изображения захватывать изображение блока передачи энергии, когда транспортное средство приближается к блоку передачи энергии, и блок передачи энергии находится под кузовом транспортного средства.
Предпочтительно предписанное расстояние является предварительно определенным расстоянием, которое предоставляет блоку приема энергии возможность принимать электрическую энергию из блока передачи энергии.
Предпочтительно электрически питаемое транспортное средство дополнительно включает в себя блок связи. Блок связи проводит связь с устройством энергопитания. Устройство энергопитания включает в себя светоизлучающий блок, указывающий положение блока передачи энергии. Блок связи передает команду для излучения светоизлучающего блока к устройству энергопитания после того, как связь с устройством энергопитания установлена.
Предпочтительно электрически питаемое транспортное средство дополнительно включает в себя блок связи. Блок связи проводит связь с устройством энергопитания. Блок связи передает команду для активации устройства энергопитания в устройство энергопитания.
Предпочтительно блок передачи энергии включает в себя катушку передачи энергии для приема электрической энергии из источника питания. Блок приема энергии включает в себя катушку приема энергии для приема электрической энергии из катушки передачи энергии бесконтактным образом. Второй блок считывания включает в себя блок оценки расстояния. Блок оценки расстояния оценивает расстояние между блоком передачи энергии и блоком приема энергии на основании информации об электрической энергии, переданной с катушки передачи энергии на катушку приема энергии.
Предпочтительно электрическая энергия, подаваемая из блока передачи энергии в блок приема энергии во время настройки положения блока приема энергии на положение блока передачи энергии вторым блоком управления наведением, является меньшей, чем электрическая энергия, подаваемая из блока передачи энергии в блок приема энергии после завершения настройки положения блока приема энергии на положение блока передачи энергии.
Предпочтительно первый блок управления наведением включает в себя первый блок управления. Первый блок управления осуществляет рулевое управление транспортного средства на основании считанного результата первым блоком считывания. Второй блок управления наведением включает в себя второй блок управления. Второй блок управления управляет приведением в движение и торможением транспортного средства на основании считанного результата вторым блоком считывания.
Согласно настоящему изобретению устройство энергопитания для транспортного средства для подачи электрической энергии в блок приема энергии, заключенный в транспортном средстве, бесконтактным образом включает в себя блок передачи энергии, блок связи и блок управления питанием. Блок передачи энергии сконфигурирован для передачи электрической энергии, принятой из источника питания, в блок приема энергии бесконтактным образом. Блок связи проводит связь с транспортным средством. Блок управления питанием управляет электрической энергией, передаваемой из блока передачи энергии в блок приема энергии. Транспортное средство сконфигурировано для выполнения настройки положения блока приема энергии на положение блока передачи энергии на основании условия подачи электрической энергии из блока передачи энергии в блок приема энергии. Во время приема сигнала, указывающего, что настройка выполняется в транспортном средстве, из транспортного средства через блок связи, блок управления питанием управляет электрической энергией, чтобы она была меньшей, чем электрическая энергия, передаваемая из блока передачи энергии в блок приема энергии после завершения настройки.
Предпочтительно устройство энергопитания для транспортного средства дополнительно включает в себя светоизлучающий блок, указывающий положение блока передачи энергии. Светоизлучающий блок излучает свет после того, как связь с транспортным средством установлена блоком связи.
Кроме того, еще предпочтительно светоизлучающий блок излучает свет в ответ на команду, принятую из транспортного средства через блок связи.
Предпочтительно блок управления электропитанием активизируется в ответ на команду, принятую из транспортного средства через блок связи.
В настоящем изобретении управление парковкой транспортного средства выполняется в две стадии. На первой стадии взаимное расположение между блоком передачи энергии и блоком приема энергии считывается первым средством считывания, и транспортное средство управляется первым средством управления наведением таким образом, чтобы транспортное средство наводилось на блок передачи энергии, на основании считанного результата. На второй стадии расстояние между блоком передачи энергии и блоком приема энергии считывается вторым средством считывания на основании условий подачи электрической энергии из блока передачи энергии в блок приема энергии. Когда транспортное средство находится в пределах предписанного расстояния от блока передачи энергии благодаря первому средству управления наведением, транспортное средство управляется вторым средством управления наведением таким образом, чтобы положение блока приема энергии настраивалось на положение блока передачи энергии, на основании считанного результата вторым средством считывания. Соответственно настройка положения блока приема энергии, заключенного в транспортном средстве, на положение блока передачи энергии устройства энергопитания может выполняться без предоставления крупногабаритного оборудования.
Поэтому согласно настоящему изобретению система энергопитания для транспортного средства, имеющая простую конструкцию, может быть осуществлена наряду с обеспечением точности парковки по отношению к устройству энергопитания.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопроводительные чертежи, на которых:
Фиг.1 изображает общую схему конструкции системы энергопитания для транспортного средства согласно варианту осуществления настоящего изобретения;
Фиг.2 изображает принципы передачи энергии посредством резонанса;
Фиг.3 изображает зависимость между расстоянием от источника тока (магнитного источника тока) и напряженностью электромагнитного поля;
Фиг.4 изображает принципиальную схему конструкции электрически питаемого транспортного средства, показанного на Фиг.1;
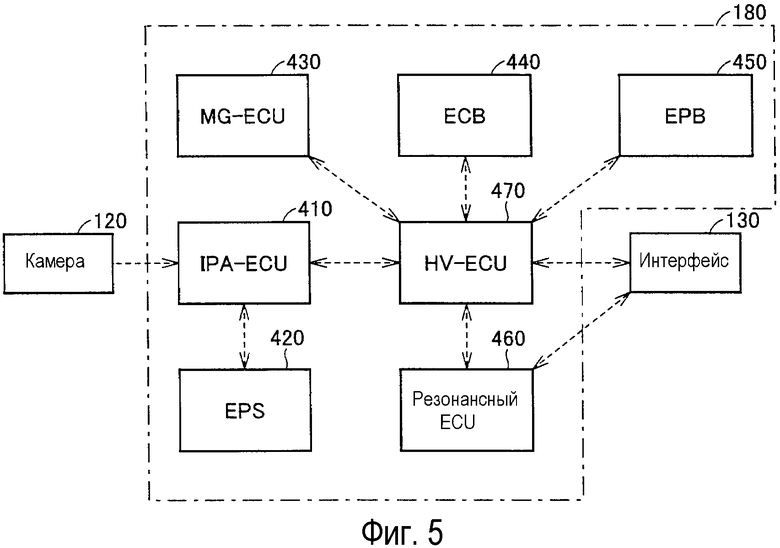
Фиг.5 изображает функциональную схему устройства управления, показанного на Фиг.4;
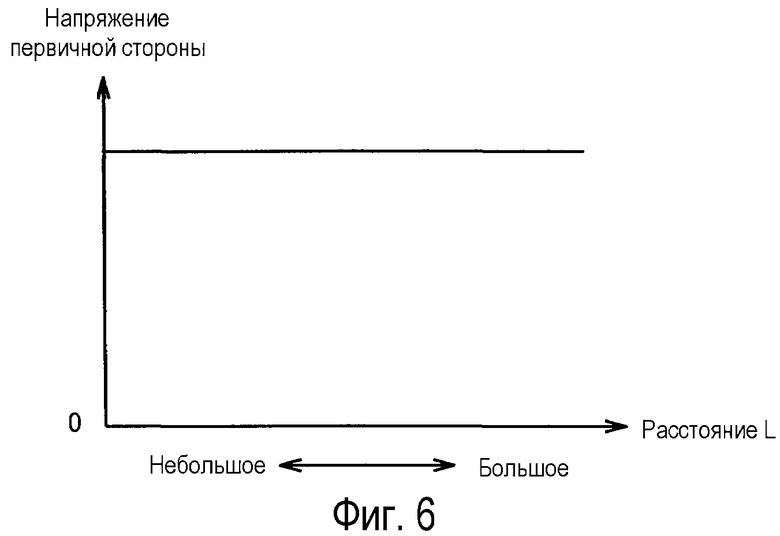
Фиг.6 изображает зависимость между расстоянием между блоком передачи энергии и блоком приема энергии и напряжением первичной стороны;
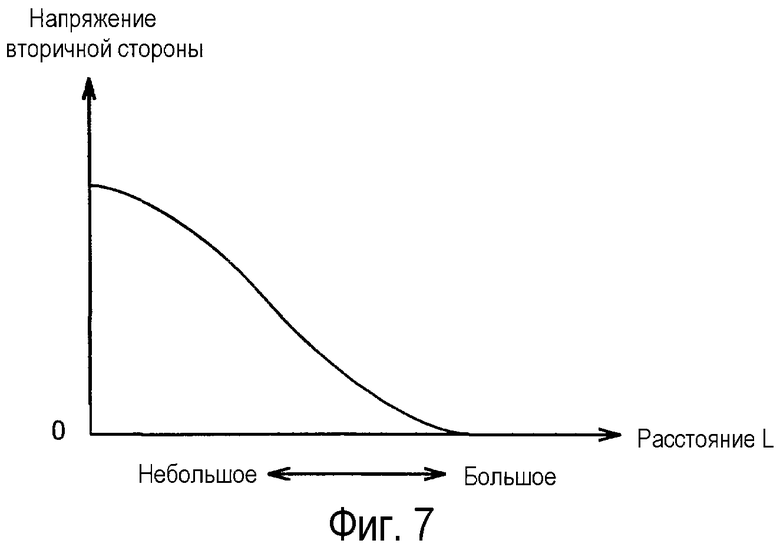
Фиг.7 изображает зависимость между расстоянием между блоком передачи энергии и блоком приема энергии и напряжением вторичной стороны;
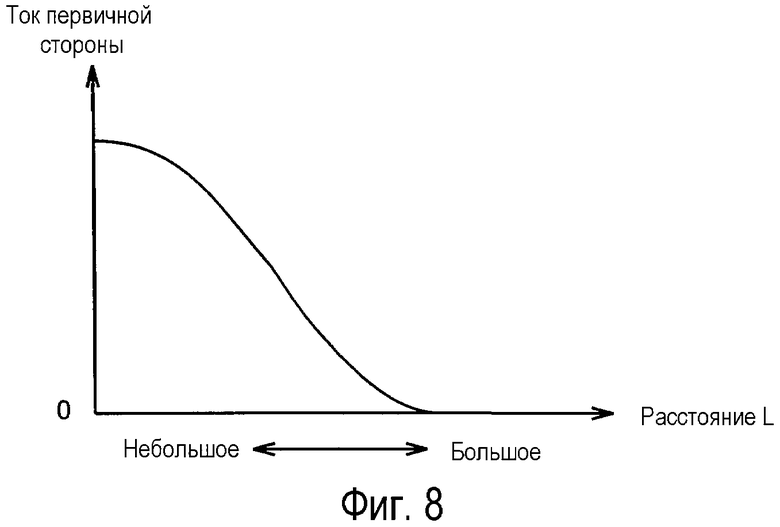
Фиг.8 изображает зависимость между расстоянием между блоком передачи энергии и блоком приема энергии и током первичной стороны;
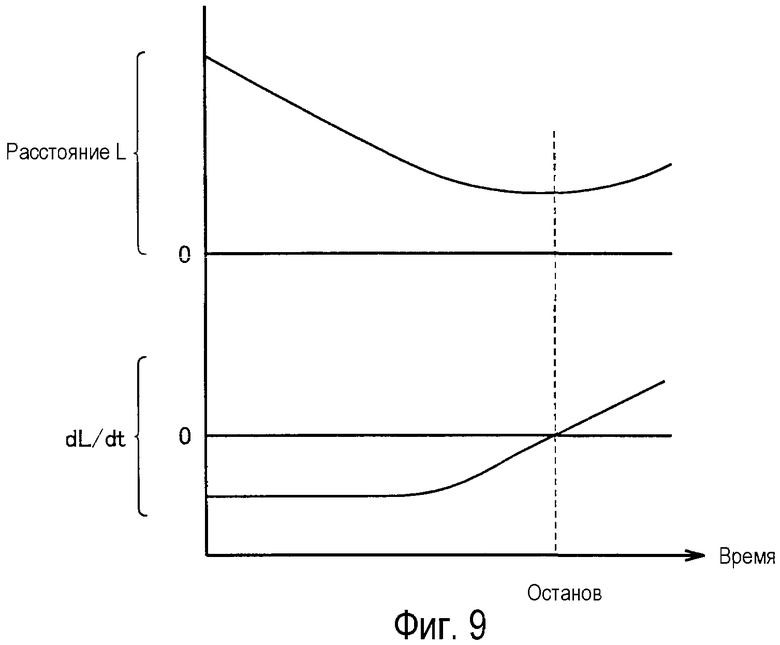
Фиг.9 изображает изменения расстояния между блоком передачи энергии и блоком приема энергии и его дифференциальное значение;
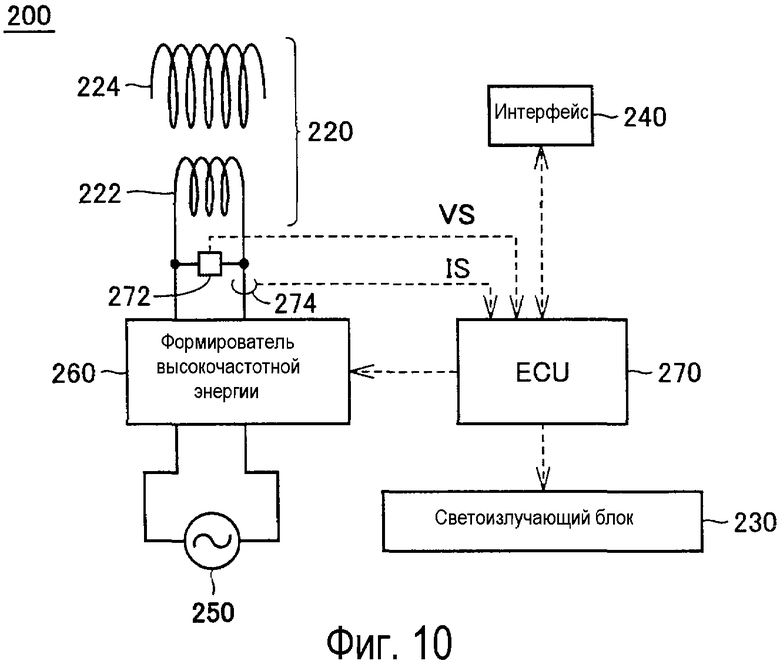
Фиг.10 изображает функциональную схему устройства энергопитания, показанного на Фиг.1;
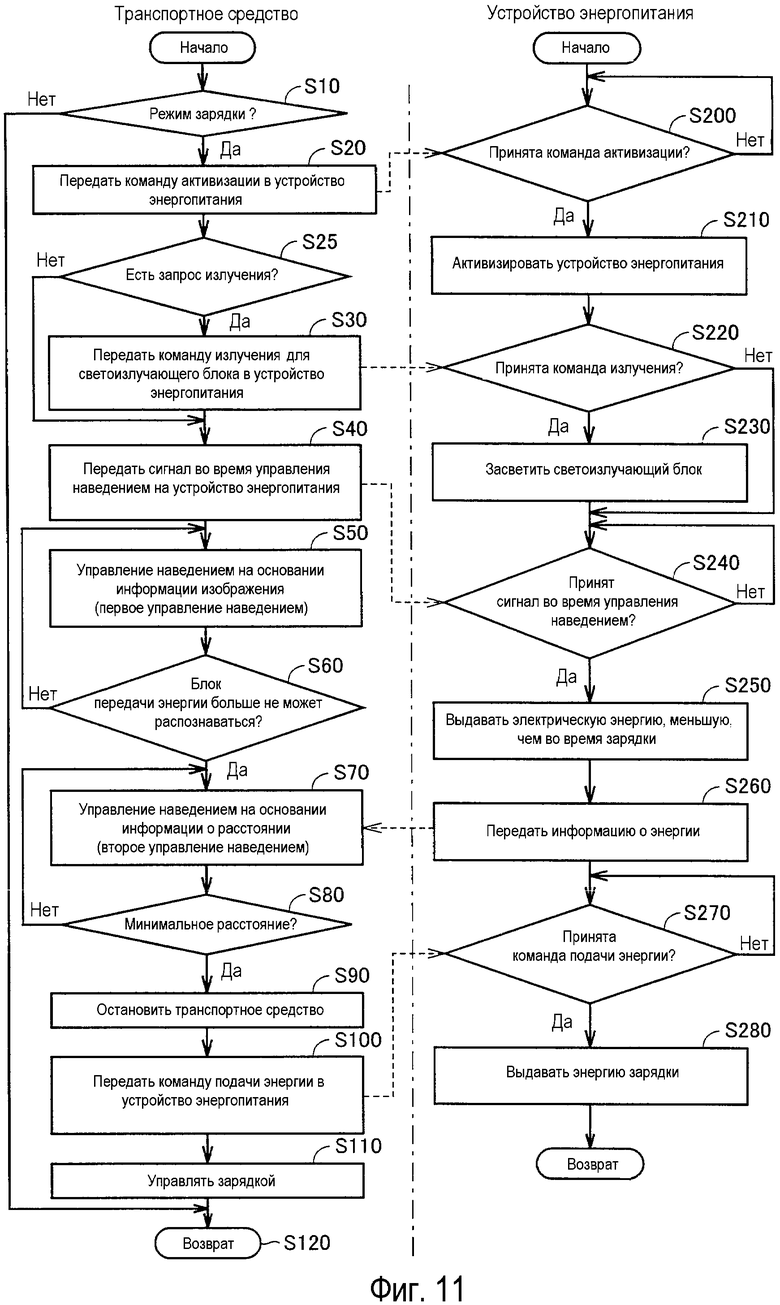
Фиг.11 изображает блок-схему последовательности операций способа, иллюстрирующую управление наведением транспортного средства, выполняемое устройством управления электрически питаемого транспортного средства и электронным блоком управления (ECU) устройства энергопитания.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Варианты осуществления настоящего изобретения в дальнейшем будут подробно описаны со ссылками на чертежи.
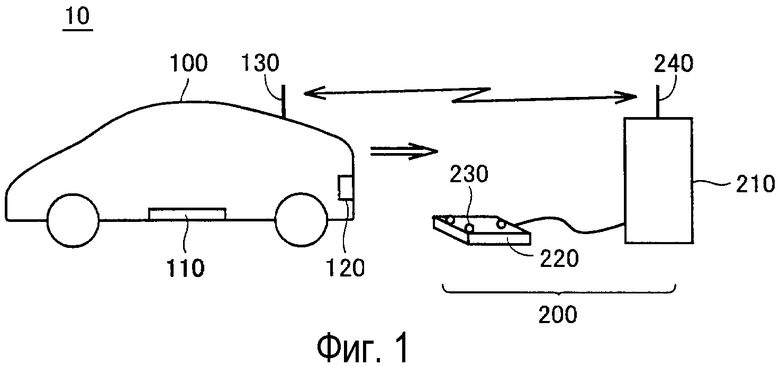
Фиг.1 изображает общую схему конструкции системы энергопитания для транспортного средства согласно варианту осуществления настоящего изобретения. Со ссылкой на Фиг.1 система энергопитания для транспортного средства 10 включает в себя электрически питаемое транспортное средство 100 и устройство 200 энергопитания. Электрически питаемое транспортное средство 100 включает в себя блок 110 приема энергии, камеру 120 и блок 130 связи.
Блок 110 приема энергии прикреплен к нижней части кузова транспортного средства и сконфигурирован для приема электрической энергии, передаваемой из блока 220 передачи энергии (который будет описан позже) устройства 200 энергопитания бесконтактным образом. Более точно блок 110 приема энергии включает в себя саморезонансную катушку (которая будет описана позже) и принимает электрическую энергию из блока 220 передачи энергии бесконтактным образом, резонируя с саморезонансной катушкой, включенной в блок 220 передачи энергии, через электромагнитное поле. Камера 120 предусмотрена для считывания взаимного расположения между блоком 110 приема энергии и блоком 220 передачи энергии и прикреплена к кузову транспортного средства таким образом, чтобы она могла захватывать изображение позади транспортного средства. Блок 130 связи является интерфейсом связи для проведения связи между электрически питаемым транспортным средством 100 и устройством 200 энергопитания.
Устройство 200 энергопитания включает в себя устройство 210 блока питания, блок 220 передачи энергии, светоизлучающие блоки 230 и блок 240 связи. Устройство 210 блока питания преобразует энергию промышленного переменного тока (AC), подаваемую из источника питания системы, например, в высокочастотную электрическую энергию и выдает таковую в блок 220 передачи энергии. Высокочастотная электрическая энергия, вырабатываемая устройством 210 блока питания, например, имеет частоту от 1 до более чем десять МГц.
Блок 220 передачи энергии крепится к поверхности пола места парковки и сконфигурирован для передачи высокочастотной электрической энергии, подаваемой из устройства 210 блока питания в блок 110 приема энергии электрически питаемого транспортного средства 100 бесконтактным образом. Более точно блок 220 энергопитания включает в себя саморезонансную катушку (которая будет описана позже) и передает электрическую энергию в блок 110 приема энергии бесконтактным образом, резонируя с саморезонансной катушкой, включенной в блок 110 приема энергии, через электромагнитное поле. Множество светоизлучающих блоков 230 предусмотрено в блоке 220 передачи энергии для указания положения блока 220 передачи энергии. Каждый из светоизлучающих блоков 230, например, включает в себя СИД (светоизлучающий диод, LED). Блок 240 связи является интерфейсом связи для проведения связи между устройством 200 энергопитания и электрически питаемым транспортным средством 100.
В системе энергопитания для транспортного средства 10 блок 220 передачи энергии устройства 200 энергопитания передает высокочастотную электрическую энергию, а саморезонансная катушка, включенная в блок 110 приема энергии электрически питаемого транспортного средства 100, и саморезонансная катушка, включенная в блок 220 передачи энергии, резонируют друг с другом через электромагнитное поле, тем самым, подавая электрическую энергию из устройства 200 энергопитания на электрически питаемое транспортное средство 100. Для подачи электрической энергии из устройства 200 энергопитания на электрически питаемое транспортное средство 100, электрически питаемому транспортному средству 100 необходимо быть наведенным на устройство 200 энергопитания для настройки положения блока 110 приема энергии электрически питаемого транспортного средства 100 на положение блока 220 передачи энергии устройства 200 энергопитания. В настоящем варианте осуществления управление парковкой электрически питаемого транспортного средства 100 по отношению к устройству 200 энергопитания выполняется в две стадии.
А именно на первой стадии взаимное расположение между блоком 110 приема энергии электрически питаемого транспортного средства 100 и блоком 220 передачи энергии устройства 200 энергопитания считывается на основании изображения, снятого камерой 120, и транспортное средство управляется таким образом, чтобы оно наводилось на блок 220 передачи энергии на основании считанного результата. Более точно изображение множества светоизлучающих блоков 230, установленных на блоке 220 передачи энергии, снимается камерой 120, и положения и ориентации множества светоизлучающих блоков 230 распознаются посредством распознавания изображения. Затем положения и ориентации блока 220 передачи энергии и транспортного средства распознаются на основании результата распознавания изображения, и транспортное средство наводится на блок 220 передачи энергии на основании результата распознавания.
Площадь, где блок 110 приема энергии и блок 220 передачи энергии обращены друг к другу, является меньшей, чем площадь нижней части кузова транспортного средства. Когда блок 220 передачи энергии находится под кузовом транспортного средства, и камера 120 больше не может захватывать изображение блока 220 передачи энергии, управление парковкой переключается с первой стадии на вторую стадию. На второй стадии, электрическая энергия подается из блока 220 передачи энергии в блок 110 приема энергии, и расстояние между блоком 220 передачи энергии и блоком 110 приема энергии считывается на основании условий подачи электрической энергии. Затем транспортное средство управляется таким образом, чтобы положение блока 110 приема энергии настраивалось на положение блока 220 передачи энергии на основании информации о расстоянии.
Электрическая энергия, переданная из блока 220 передачи энергии на второй стадии, описанной выше, настраивается, чтобы быть меньшей, чем электрическая энергия, подаваемая из блока 220 передачи энергии в блок 110 приема энергии после завершения настройки положения блока 110 приема энергии на положение блока 220 передачи энергии. Это происходит потому, что передача электрической энергии из блока 220 передачи энергии на второй стадии, описанной выше, предназначена для считывания расстояния между блоком 220 передачи энергии и блоком 110 приема энергии, и не нужна большая электрическая энергия для действительной подачи электрической энергии.
Затем будет описан способ бесконтактного энергопитания, используемый в системе энергопитания для транспортного средства 10 согласно настоящему варианту осуществления. В системе энергопитания для транспортного средства 10 согласно настоящему варианту осуществления электрическая энергия подается из устройства 200 энергопитания на электрически питаемое транспортное средство 100 посредством резонанса.
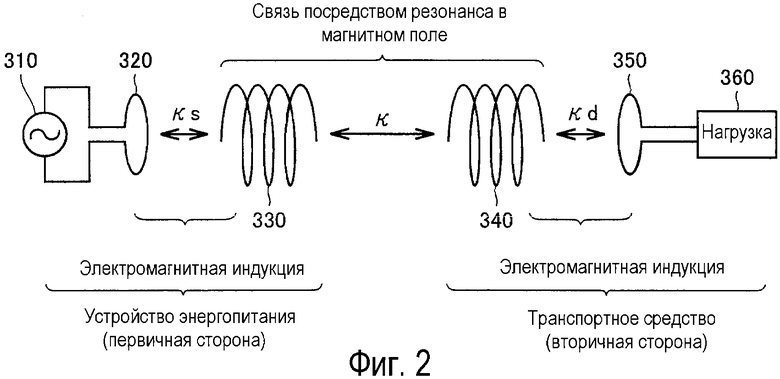
Фиг.2 иллюстрирует принципы передачи энергии посредством резонанса. Со ссылкой на Фиг.2 этот резонанс таков, что, когда две катушки LC-резонанса, имеющие одинаковую собственную частоту, резонируют друг с другом в электромагнитном поле (в ближнем поле) таким же образом, что и два камертона резонируют друг с другом, электрическая энергия передается с одной из катушек на другую катушку через электромагнитное поле.
Более точно высокочастотный источник 310 питания присоединен к первичной катушке 320, и высокочастотная электрическая энергия от 1 до более чем десять МГц подается в первичную саморезонансную катушку 330, магнитно связанную с первичной катушкой 320, посредством электромагнитной индукции. Первичная саморезонансная катушка 330 является LC-резонатором, имеющим индуктивность самой катушки и паразитную емкость, и резонирует с вторичной саморезонансной катушкой 340, имеющей резонансную частоту, такую же, как у первичной саморезонансной катушки 330, через электромагнитное поле (ближнее поле). Следовательно, энергия (электрическая энергия) передается с первичной саморезонансной катушки 330 на вторичную саморезонансную катушку 340 через электромагнитное поле. Энергия (электрическая энергия), передаваемая во вторичную саморезонансную катушку 340, снимается вторичной катушкой 350, магнитно связанной с вторичной саморезонансной катушкой 340, посредством электромагнитной индукции, и выдается в нагрузку 360. Передача электрической энергии посредством резонанса реализуется, когда значение Q (добротности), указывающее силу резонанса первичной саморезонансной катушки 330 и вторичной саморезонансной катушки 340, например, является большим чем 100.
В показателях отношения соответствия с Фиг.1 вторичная саморезонансная катушка 340 и вторичная катушка 350 соответствуют блоку 110 приема энергии на Фиг.1, а первичная катушка 320 и первичная саморезонансная катушка 330 соответствуют блоку 220 передачи энергии на Фиг.1.
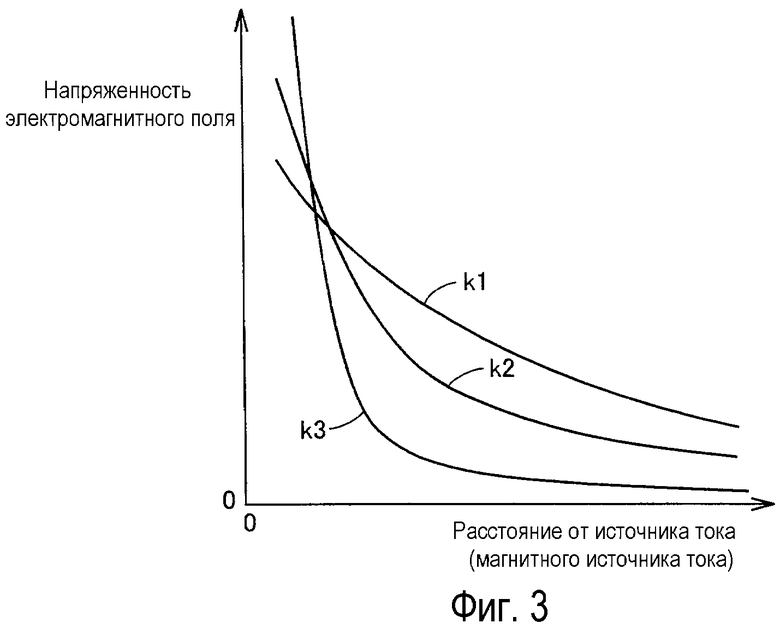
Фиг.3 показывает зависимость между расстоянием от источника тока (магнитного источника тока) и напряженностью электромагнитного поля. Со ссылкой на Фиг.3 электромагнитное поле содержит в себе три составляющих. Кривая k1 обозначает составляющую, обратно пропорциональную расстоянию от источника волны, и указывается ссылкой как «электромагнитное поле излучения». Кривая k2 обозначает составляющую, обратно пропорциональную квадрату расстояния от источника волны, и указывается ссылкой как «электромагнитное поле индукции». Кривая k3 обозначает составляющую, обратно пропорциональную кубу расстояния от источника волны, и указывается ссылкой как «статическое электромагнитное поле».
Эти электромагнитные поля включают в себя область, где интенсивность электромагнитной волны резко уменьшается с расстоянием от источника волны. Резонанс использует это ближнее поле (незначительное поле) для передачи энергии (электрической энергии). То есть посредством побуждения пары резонаторов (например, пары обмоток LC-резонанса), имеющих идентичную собственную частоту, резонировать друг с другом с использованием поля в ближней зоне, энергия (электрическая энергия) передается с одного из резонаторов (первичной саморезонансной катушки) на другой резонатор (вторичную саморезонансную катушку). Поскольку энергия (электрическая энергия) не распространяется на большое расстояние в поле в ближней зоне, резонанс может передавать электрическую энергию с меньшими энергетическими потерями, чем электромагнитная волна, которая переносит энергию (электрическую энергию) в «электромагнитном поле излучения», в котором энергия распространяется на большое расстояние.
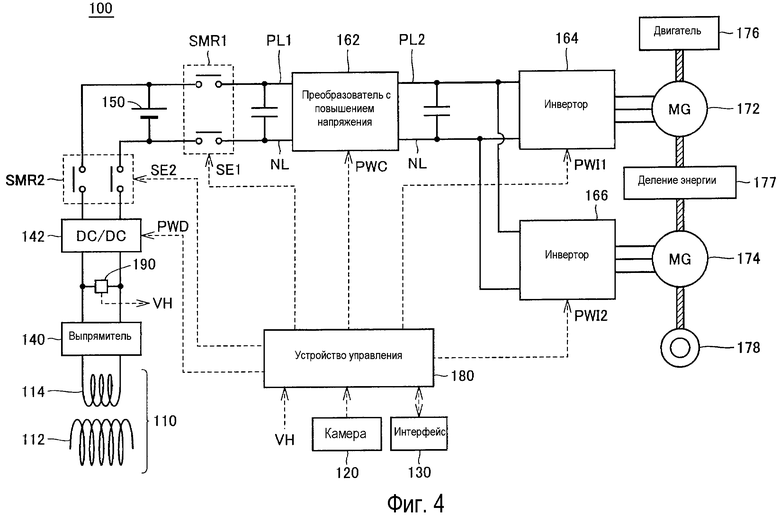
Фиг.4 изображает детализированную схему конструкции электрически питаемого транспортного средства 100, показанного на Фиг.1. Со ссылкой на Фиг.4 электрически питаемое транспортное средство 100 включает в себя устройство 150 накопления энергии, главное реле SMR1 системы, преобразователь 162 с повышением напряжения, инверторы 164, 166, двигатель-генераторы 172, 174, двигатель 176, устройство 177 деления энергии и ведущее колесо 178. Электрически питаемое транспортное средство 100 также включает в себя вторичную саморезонансную катушку 112, вторичную катушку 114, выпрямитель 140, преобразователь 142 DC/DC, главное реле SMR2 системы и датчик 190 напряжения. Электрически питаемое транспортное средство 100 дополнительно включает в себя устройство 180 управления, камеру 120 и блок 130 связи.
Электрически питаемое транспортное средство 100 заключает в себе двигатель 176 и двигатель-генератор 174 в качестве источника привода. Двигатель 176 и двигатель-генераторы 172, 174 присоединены к устройству 177 деления энергии. Электрически питаемое транспортное средство 100 перемещается движущей силой, вырабатываемой по меньшей мере одним двигателем 176 и двигатель-генератором 174. Механическая энергия, вырабатываемая двигателем 176, разделяется на два тракта устройством 177 деления энергии. А именно один является трактом для передачи энергии на ведущее колесо, а другой является трактом для передачи энергии на двигатель-генератор 172.
Двигатель-генератор 172 является вращающейся электрической машиной переменного тока и, например, включает в себя трехфазный синхронный электропривод переменного тока, имеющий ротор, в котором заложен постоянный магнит. Двигатель-генератор 172 вырабатывает электрическую энергию, используя кинетическую энергию двигателя 176, которая была разделена устройством 177 деления энергии. Когда состояние заряда (также указываемое ссылкой как «SOC») устройства 150 накопления энергии становится более низким, чем предварительно определенное значение, например двигатель 176 запускается, и двигатель-генератор 172 вырабатывает электрическую энергию для зарядки устройства 150 накопления энергии.
Как и двигатель-генератор 172, двигатель-генератор 174 является вращающейся электрической машиной переменного тока и, например, включает в себя трехфазный синхронный электропривод переменного тока, имеющий ротор, в котором заложен постоянный магнит. Двигатель-генератор 174 вырабатывает движущую силу, используя по меньшей мере одну из электрической энергии, накопленной в устройстве 150 накопления энергии, и электрической энергии, вырабатываемой двигатель-генератором 172. Движущая сила из двигатель-генератора 174 передается на ведущее колесо 178.
Во время торможения транспортного средства или во время снижения ускорения на нисходящем склоне, механическая энергия, накопленная транспортным средством в виде кинетической энергии и потенциальной энергии, используется посредством ведущего колеса 178 для приведения двигатель-генератора 174 во вращение, так что двигатель-генератор 174 действует в качестве генератора энергии. Как результат, двигатель-генератор 174 действует в качестве рекуперативного тормоза для преобразования энергии движения в электрическую энергию, чтобы формировать тормозное усилие. Электрическая энергия, выработанная двигатель-генератором 174, накапливается в устройстве 150 накопления энергии.
Устройство 177 деления энергии включает в себя планетарную передачу, имеющую солнечную шестерню, ведущую шестерню, водило и коронную шестерню. Ведущая шестерня зацепляется с солнечной шестерней и коронной шестерней. Водило с возможностью вращения поддерживает ведущую шестерню и присоединено к коленчатому валу двигателя 176. Солнечная шестерня присоединена к валу вращения двигатель-генератора 172. Коронная шестерня присоединена к валу вращения двигатель-генератора 174 и ведущего колеса 178.
Устройство 150 накопления энергии является перезаряжаемым источником питания постоянного тока (DC) и включает в себя вторичную аккумуляторную батарею, такую как литий-ионная аккумуляторная батарея или никель-металлгидридная аккумуляторная батарея. Устройство 150 накопления энергии накапливает электрическую энергию, подаваемую из преобразователя 142 DC/DC, и к тому же накапливает рекуперативную электрическую энергию, вырабатываемую двигатель-генераторами 172, 174. Устройство 150 накопления энергии подает накопленную электрическую энергию на преобразователь 162 с повышением напряжения. Конденсатор, имеющий большую емкость, или любой промежуточный накопитель энергии, способный к временному хранению электрической энергии, подаваемой из устройства 200 энергопитания (Фиг.1) и рекуперативной электрической энергии из двигатель-генераторов 172, 174 и подаче накопленной электрической энергии в преобразователь 162 с повышением напряжения, может применяться в качестве устройства 150 накопления энергии.
Главное реле SMR1 системы предусмотрено между устройством 150 накопления энергии и преобразователем 162 с повышением напряжения. Главное реле SMR1 системы электрически присоединяет устройство 150 накопления энергии к преобразователю 162 с повышением напряжения, когда активизируется сигнал SE1 из устройства 180 управления, и прерывает электрический тракт между устройством 150 накопления энергии и преобразователем 162 с повышением напряжения, когда сигнал SE1 деактивизируется. Преобразователь 162 с повышением напряжения повышает напряжение линии PL2 положительного электрода, чтобы было равно или выше, чем напряжение, выдаваемое из устройства 150 накопления энергии, в ответ на сигнал PWC из устройства 180 управления. Преобразователь 162 с повышением напряжения, например, включает в себя схему прерывателя постоянного тока. Инверторы 164, 166 предусмотрены соответственно для двигатель-генераторов 172, 174 в указанном порядке. Инвертор 164 возбуждает двигатель-генератор 172 в ответ на сигнал PWI1 из устройства 180 управления, а инвертор 166 возбуждает двигатель-генератор 174 в ответ на сигнал PWI2 из устройства 180 управления. Каждый из инверторов 164, 166, например, включает в себя трехфазную мостовую схему.
Вторичная саморезонансная катушка 112 является катушкой LC-резонанса с разомкнутыми (несоединенными) противоположными концами и принимает электрическую энергию из устройства 200 энергопитания, резонируя с первичной саморезонансной катушкой (которая будет описана позже) устройства 200 энергопитания через электромагнитное поле. Емкостная составляющая вторичной саморезонансной катушки 112 является паразитной емкостью катушки, однако может быть предусмотрен конденсатор, присоединенный на обоих концах катушки. Витки вторичной саморезонансной катушки 112 настроены так, чтобы иметь большое значение Q (например, Q>100), указывающее силу резонанса первичной саморезонансной катушки и вторичной саморезонансной катушки 112, большое чем κ, указывающее степень их связи, и тому подобное на основании расстояния от первичной саморезонансной катушки устройства 200 энергопитания, резонансной частоты первичной саморезонансной катушки и вторичной саморезонансной катушки 112 и тому подобного.
Вторичная катушка 114 установлена соосно с вторичной саморезонансной катушкой 112 и может быть магнитно связанной с вторичной саморезонансной катушкой 112 посредством электромагнитной индукции. Вторичная катушка 114 снимает электрическую энергию, принятую вторичной саморезонансной катушкой 112 посредством электромагнитной индукции, и выдает таковую на выпрямитель 140. Вторичная саморезонансная катушка 112 и вторичная катушка 114 образуют блок 110 приема энергии, показанный на Фиг.1.
Выпрямитель 140 выпрямляет энергию переменного тока, снятую вторичной катушкой 114. Преобразователь 112 DC/DC преобразует электрическую энергию, выпрямленную выпрямителем 140, в электрическую энергию, имеющую уровень напряжения устройства 150 накопления энергии, в ответ на сигнал PWD из устройства 180 управления и выдает таковую в устройство 150 накопления энергии. Главное реле SMR2 системы предусмотрено между преобразователем 142 DC/DC и устройством 150 накопления энергии. Главное реле SMR2 системы электрически присоединяет устройство 150 накопления энергии к преобразователю 142 DC/DC, когда активизируется сигнал SE2 из устройства 180 управления, и прерывает электрический тракт между устройством 150 накопления энергии и преобразователем 142 DC/DC, когда сигнал SE2 деактивизируется. Датчик 190 напряжения детектирует напряжение VH между выпрямителем 140 и преобразователем 142 DC/DC и выдает детектированное напряжение в устройство 180 управления.
Устройство 180 управления вырабатывает сигналы PWC, PWI1, PWI2 для возбуждения преобразователя 162 с повышением напряжения и двигатель-генераторов 172, 174, соответственно, на основании положения акселератора, скорости транспортного средства и других сигналов с различных датчиков, и выдает выработанные сигналы PWC, PWI1, PWI2 в преобразователь 162 с повышением напряжения и инверторы 164, 166, соответственно. Во время перемещения транспортного средства устройство 180 управления активизирует сигнал SE1 для включения главного реле SMR1 системы и деактивизирует сигнал SE2 для выключения главного реле SMR2 системы.
Во время подачи электрической энергии из устройства 200 энергопитания (Фиг.1) на электрически питаемое транспортное средство 100 устройство 180 управления принимает изображение с камеры 120, захваченное камерой 120. Дополнительно устройство 180 управления принимает информацию об электрической энергии (напряжении и токе), передаваемой из устройства 200 энергопитания, из устройства 200 энергопитания через блок 130 связи и принимает детектированное значение для напряжения VH, детектированное датчиком 190 напряжения, с датчика 190 напряжения. Затем устройство 180 управления выполняет управление парковкой транспортного средства на основании данных таким образом, чтобы транспортное средство наводилось на блок 220 передачи энергии устройства 200 энергопитания (Фиг.1), способом, описанным ниже.
По завершению управления парковкой по отношению к блоку 220 передачи энергии устройство 180 управления передает команду подачи электрической энергии в устройство 200 энергопитания через блок 130 связи и активизирует сигнал SE2 для включения главного реле SMR2 системы. Затем устройство 180 управления вырабатывает сигнал PWD для возбуждения преобразователя 142 DC/DC и выдает выработанный сигнал PWD в преобразователь 142 DC/DC.
Фиг.5 изображает функциональную схему устройства 180 управления, показанного на Фиг.4. Со ссылкой на Фиг.5 устройство 180 управления включает в себя IPA-ECU 410 (электронный блок управления интеллектуальным содействием парковке), EPS 420 (рулевое управление с электрическим усилителем), MG-ECU 430 (электронный блок управления двигатель-генератором, ECB 440 (тормоз с электронным управлением), EPB 450 (электрический стояночный тормоз), резонансный ECU 460 и HV-ECU 470 (электронный блок управления гибридным транспортным средством).
IPA-ECU 410 выполняет управление наведением по наведению транспортного средства на блок 220 передачи энергии устройства 200 энергопитания (Фиг.1) на основании информации изображения, принятой с камеры 120 (первое управление наведением), когда режимом работы транспортного средства является режим зарядки. Более точно, IPA-ECU 410 распознает блок 220 передачи энергии на основании информации изображения, принятой с камеры 120. Множество светоизлучающих блоков 230, указывающих положение и ориентацию блока 220 передачи энергии, установлены на блоке 220 передачи энергии, IPA-ECU 410 распознает взаимное расположение по отношению к блоку 220 передачи энергии (основное расстояние и ориентацию) на основании изображения множества светоизлучающих блоков 230, показанных в камере 120. Затем IPA-ECU 410 выдает команду в EPS 420 на основании результата распознавания таким образом, чтобы транспортное средство наводилось в надлежащей ориентации на блок 220 передачи энергии.
Когда транспортное средство приближается к блоку 220 передачи энергии, и блок 220 передачи энергии находится под кузовом транспортного средства таким образом, чтобы камера 120 больше не могла захватывать изображение блока 220 передачи энергии, IPA-ECU 410 уведомляет HV-ECU 470 о завершении управления наведением на основании информации изображения с камеры 120 (первого управления наведением). Во время первого управления наведением EPS 420 автоматически осуществляет рулевое управление в ответ на команду из IPA-ECU 410.
MG-ECU 430 управляет двигатель-генераторами 172, 174 и преобразователем 162 с повышением напряжения в ответ на команду из HV-ECU 470. Более точно MG-ECU 430 вырабатывает сигналы для возбуждения двигатель-генераторов 172, 174 и преобразователя 162 с повышением напряжения и выдает таковые в инверторы 164, 166 и преобразователь 162 с повышением напряжения, соответственно.
ECB 440 управляет торможением транспортного средства в ответ на команду из HV-ECU 470. Более точно, ECB 440 управляет гидравлическим тормозом и управляет координацией между гидравлическим тормозом и рекуперативным тормозом посредством двигатель-генератора 174 в ответ на команду из HV-ECU 470. EPB 450 управляет электрическим стояночным тормозом в ответ на команду из HV-ECU 470.
Резонансный ECU 460 принимает информацию об электрической энергии, передаваемой из устройства 200 энергопитания (Фиг.1), из устройства 200 энергопитания через блок 130 связи. Резонансный ECU 460 также принимает детектированное значение для напряжения VH, указывающее напряжение приема на транспортном средстве, с датчика 190 (Фиг.4). Затем резонансный ECU 460 считывает расстояние между блоком 220 передачи энергии устройства 200 энергопитания и блоком 110 приема энергии транспортного средства, сравнивая напряжение электрической энергии, передаваемой из устройства 200 энергопитания, с напряжением VH.
Более точно по отношению к постоянному напряжению первичной стороны (выходному напряжению из устройства 200 энергопитания), как показано на Фиг.6, напряжение вторичной стороны (напряжение приема в электрически питаемом транспортном средстве 100) меняется в зависимости от расстояния L между блоком 220 передачи энергии устройства 200 энергопитания и блоком 110 приема энергии электрически питаемого транспортного средства 100, как показано на Фиг.7. Соответственно посредством заблаговременного определения зависимости между напряжением первичной стороны и напряжением вторичной стороны, показанной на Фиг.6 и 7, и создания регулировочной характеристики или тому подобного расстояние между блоком 220 передачи энергии и блоком 110 приема энергии может считываться на основании детектированного напряжения для напряжения VH, указывающего напряжение вторичной стороны.
Ток первичной стороны (выходной ток из устройства 200 энергопитания) меняется в зависимости от расстояния L между блоком 220 передачи энергии и блоком 110 приема энергии, как показано на Фиг.8. Соответственно, расстояние между блоком 220 передачи энергии и блоком 110 приема энергии может считываться на основании детектированного значения для выходного тока из устройства 200 энергопитания посредством использования этого соотношения.
Возвращаясь к Фиг.5, резонансный ECU 460 считывает расстояние между блоком 220 передачи энергии и блоком 110 приема энергии и выдает информацию о расстоянии в HV-ECU 470. В дополнение резонансный ECU 460 принимает команду начала зарядки из HV-ECU 470 и активизирует сигнал SE2, выдаваемый на главное реле SMR2 системы для включения главного реле SMR2 системы. Затем резонансное ECU 460 вырабатывает сигнал для возбуждения преобразователя 142 DC/DC и выдает таковой в преобразователь 142 DC/DC.
Когда режимом работы транспортного средства является режим движения, HV-ECU 470 выдает команды управления в MG-ECU 430 и ECB 440 в соответствии с рабочим состоянием педали акселератора и педали тормоза, условий передвижения транспортного средства и тому подобного. Когда водитель дает команду для задействования стояночного тормоза, оперируя переключателем стояночного тормоза, или тому подобным, HV-ECU 470 выдает операционную команду в EPB 450.
Когда режимом работы транспортного средства является режим зарядки, HV-ECU 470 устанавливает связь с устройством 200 энергопитания (Фиг.1) через блок 130 связи и выдает команду активизации для активизации устройства 200 энергопитания в устройство 200 энергопитания через блок 130 связи. Когда устройство 200 энергопитания активизируется, HV-ECU 470 выдает команду излучения для светоизлучающих блоков 230, установленных на блоке 220 передачи энергии устройства 200 энергопитания, к устройству 200 энергопитания через блок 130 связи. Когда светоизлучающие блоки 230 излучают, HV-ECU 470 выдает сигнал во время управления наведением, указывающий, что выполняется управление наведением по наведению электрически питаемого транспортного средства 100 на блок 220 передачи энергии, в устройство 200 энергопитания через блок 130 связи и выдает команду для выполнения управления наведением на основании информации изображения с камеры 120 (первого управления наведением) в IPA-ECU 410.
Дополнительно HV-ECU 470 принимает уведомление о завершении первого управления наведением из IPA-ECU 410 и выполняет управление наведением на основании информации о расстоянии между блоком 220 передачи энергии и блоком 110 приема энергии (второе управление наведением). Более точно HV-ECU 470 принимает информацию о расстоянии между блоком 220 передачи энергии устройства 200 энергопитания и блоком 110 приема энергии транспортного средства из резонансного ECU 460 и выдает команды, основанные на информации о расстоянии, в MG-ECU 430 и ECB 440 для управления приведением в движение и торможением транспортного средства соответственно таким образом, чтобы расстояние между блоком 220 передачи энергии и блоком 110 приема энергии становилось минимальным расстоянием.
Определение, что расстояние между блоком 220 передачи энергии и блоком 110 приема энергии является минимальным расстоянием, производится, когда дифференциальное значение расстояния L между блоком 220 передачи энергии и блоком 110 приема энергии, принятое из резонансного ECU 460, становится нулевым, например, как показано на Фиг.9.
Возвращаясь к Фиг.5, по завершению выравнивания блока 220 передачи энергии с блоком 110 приема энергии, HV-ECU 470 выдает операционную команду в EPB 450, а затем выдает команду подачи электрической энергии для подачи электрической энергии из устройства 200 энергопитания в устройство 200 энергопитания через блок 130 связи и выдает команду начала зарядки в резонансный ECU 460.
В устройстве 180 управления, когда режим работы транспортного средства входит в режим зарядки, HV-ECU 470 устанавливает связь с устройством 200 энергопитания через блок 130 связи и передает команду активизации в устройство 200 энергопитания через блок 130 связи. Когда устройство 200 энергопитания активизируется в ответ на команду активизации, HV-ECU 470 передает команду излучения для светоизлучающих блоков 230 в устройство 200 энергопитания через блок 130 связи. Когда светоизлучающие блоки 230 в блоке 220 передачи энергии излучают, HV-ECU 470 передает сигнал во время управления наведением в устройство 200 энергопитания через блок 130 связи и выдает команду для выполнения управления наведением на основании информации изображения с камеры 120 (первого управления наведением) в IPA-ECU 410.
IPA-ECU 410 принимает команду из HV-ECU 470, выполняет управление наведением на основании информации изображения из камеры 120 (первое управление наведением) и выдает команду для осуществления автоматического рулевого управления в EPS 420. Когда транспортное средство приближается к блоку 220 передачи энергии, и блок 220 передачи энергии находится под кузовом транспортного средства, так что камера 120 больше не может распознавать блок 220 передачи энергии, IPA-ECU 410 уведомляет HV-ECU 470 о завершении первого управления наведением.
Резонансный ECU 460 принимает информацию об электрической энергии, передаваемой из устройства 200 энергопитания, в ответ на сигнал во время управления наведением (электрической энергии, которая меньше, чем электрическая энергия, подаваемая после завершения управления парковкой, как описано выше) из устройства 200 энергопитания через блок 130 связи и принимает детектированное значение для напряжения VH, указывающее напряжение приема на электрически питаемом транспортном средстве 100, с датчика 190 напряжения. Затем резонансный ECU 460 оценивает расстояние между блоком 220 передачи энергии и блоком 110 приема энергии на основании условий подачи электрической энергии из устройства 200 энергопитания на электрически питаемое транспортное средство 100, и выдает информацию о расстоянии в HV-ECU 470. HV-ECU 470 принимает уведомление о завершении первого управления наведением на основании информации изображения с камеры 120 из IPA-ECU 410 и выполняет управление наведением на основании информации о расстоянии между блоком 220 передачи энергии и блоком 110 приема энергии, принятой из резонансного ECU 460 (второе управление наведением), и выдает команды для автоматического управления приведением в движение и торможением транспортного средства в MG-ECU 430 и ECB 440, соответственно.
Затем по завершению выравнивания блока 220 передачи энергии с блоком 110 приема энергии посредством второго управления наведением, HV-ECU 470 выдает операционную команду в EPB 450, а затем выдает команду подачи электрической энергии в устройство 200 энергопитания через блок 130 связи и выдает команду начала зарядки в резонансный ECU 460. Следовательно, начинается действительная подача электрической энергии из устройства 200 энергопитания в электрически питаемое транспортное средство 100.
Фиг.10 изображает функциональную схему устройства 200 энергопитания, показанного на Фиг.1. Со ссылкой на Фиг.10 устройство 200 энергопитания включает в себя источник 250 питания переменного тока, формирователь 260 высокочастотной энергии, первичную катушку 222, первичную саморезонансную катушку 224, датчик 272 напряжения, датчик 274 тока, светоизлучающие блоки 230, блок 240 связи и ECU 270.
Источник 250 питания переменного тока является источником питания вне транспортного средства и, например, источником питания системы. Формирователь 260 высокочастотной энергии преобразует электрическую энергию, принятую из источника 250 питания переменного тока, в высокочастотную электрическую энергию и подает преобразованную высокочастотную электрическую энергию на первичную катушку 222. Высокочастотная электрическая энергия, выработанная формирователем 260 высокочастотной энергии, например, имеет частоту от 1 до более чем десять МГц.
Первичная катушка 222 установлена соосно с первичной саморезонансной катушкой 224 и может быть магнитно-связанной с первичной саморезонансной катушкой 224 посредством электромагнитной индукции. Первичная катушка 222 подает высокочастотную электрическую энергию, выданную из формирователя 260 высокочастотной энергии, на первичную саморезонансную катушку 224 посредством электромагнитной индукции.
Как и вторичная саморезонансная катушка 112 электрически питаемого транспортного средства 100, первичная саморезонансная катушка 224 является катушкой LC-резонанса с разомкнутыми (несоединенными) противоположными концами и передает электрическую энергию на электрически питаемое транспортное средство 100, резонируя с вторичной саморезонансной катушкой 112 электрически питаемого транспортного средства 100 через электромагнитное поле. Емкостная составляющая первичной саморезонансной катушки 224 также является паразитной емкостью катушки, однако может быть предусмотрен конденсатор, присоединенный на обоих концах катушки. Витки первичной саморезонансной катушки 224 также настраиваются, так, чтобы иметь большое значение Q (например, Q>100), большую степень связности κ, и тому подобное, на основании расстояния от вторичной саморезонансной катушки 112 электрически питаемого транспортного средства 100, резонансной частоты первичной саморезонансной катушки 224 и вторичной саморезонансной катушки 112 и тому подобного.
Первичная саморезонансная катушка 224 и первичная катушка 222 образуют блок 220 передачи энергии, показанный на Фиг.1. Светоизлучающие блоки 230 и блок 240 связи уже описывались со ссылкой на Фиг.1. Датчик 272 напряжения детектирует напряжение VS, выдаваемое из формирователя 260 высокочастотной энергии, и выдает детектированное значение в ECU 270. Датчик 274 тока детектирует ток IS, выдаваемый из формирователя 260 высокочастотной энергии, и выдает детектированное значение в ECU 270.
ECU 270 принимает команду активации из электрически питаемого транспортного средства 100 через блок 240 связи и активизирует устройство 200 энергопитания. ECU 270 принимает команду излучения для светоизлучающих блоков 230 из электрически питаемого транспортного средства 100 через блок 240 связи и засвечивает светоизлучающие блоки 230. ECU 270 принимает команду подачи электрической энергии из электрически питаемого транспортного средства 100 через блок 240 связи и управляет выходом из формирователя 260 высокочастотной энергии таким образом, чтобы электрическая энергия, подаваемая из устройства 200 энергопитания на электрически питаемое транспортное средство 100, достигала целевого значения.
Дополнительно ECU 270 передает информацию о электрической энергии касательно устройства 200 энергопитания, включающую в себя детектированные значения для напряжения VS с датчика 272 напряжения и тока IS с датчика 274 тока, на электрически питаемое транспортное средство 100 через блок 240 связи наряду с приемом сигнала во время управления наведением из электрически питаемого транспортного средства 100 через блок 240 связи. Во время приема сигнала во время управления наведением ECU 270 управляет выходом из формирователя 260 высокочастотной энергии для выдачи предписанной электрической энергии, меньшей, чем электрическая энергия во время подачи энергии в ответ на команду подачи электрической энергии.
Фиг.11 изображает блок-схему последовательности операций способа, иллюстрирующую управление наведением транспортного средства, выполняемое устройством 180 управления электрически питаемого транспортного средства 100 и ECU 260 устройства 200 энергопитания. Последовательность операций, показанная на этой блок-схеме последовательности операций способа, выполняется через равные промежутки времени, или когда удовлетворено предписанное условие.
Со ссылкой на Фиг.11 в электрически питаемом транспортном средстве 100 устройство 180 управления определяет, является или нет режим работы транспортного средства режимом зарядки (этап S10). Во время режима без зарядки, то есть во время режима передвижения (Нет на этапе S10), устройство 180 управления переходит на этап S120, не выполняя оставшиеся операции.
Если на этапе S10 определено, что режим работы является режимом зарядки (Да на этапе S10), устройство 180 управления устанавливает связь между блоком 130 связи транспортного средства и блоком 240 связи устройства 200 энергопитания и передает команду активации, чтобы активизировать устройство 200 энергопитания, на устройство 200 энергопитания через блок 130 связи (этап S20). Затем, если есть запрос излучения для светоизлучающих блоков 230, установленных на блоке 220 передачи энергии устройства 200 энергопитания (Да на этапе S25), устройство 180 управления передает команду излучения для излучения светоизлучающих блоков 230 к устройству 200 энергопитания через блок 130 связи (этап S30). Затем устройство 180 управления передает сигнал во время управления наведением, указывающий, что выполняется управление наведением транспортного средства на блок 220 передачи энергии, в устройство 200 энергопитания через блок 130 связи и продолжает передачу до после того, как завершено выравнивание блока 220 передачи энергии с блоком 110 приема энергии (этап S40).
После этого устройство 180 управления выполняет управление наведением на основании информации изображения с камеры 120 (первое управление наведением) способом, описанным выше (этап S50). Первое управление наведением выполняется после того, как электрически питаемое транспортное средство 100 приближается к устройству 200 энергопитания, и блок 220 передачи энергии находится под кузовом транспортного средства, так что блок 220 передачи энергии больше не может распознаваться на основании информации изображения с камеры 120 (этап S60).
Когда блок 220 передачи энергии больше не может распознаваться на основании информации изображения с камеры 120 (Да на этапе S60), устройство 180 управления оценивает расстояние между блоком 220 передачи энергии и блоком 110 приема энергии на основании информации об электрической энергии (выходном напряжении и токе из устройства 200 энергопитания), переданной из устройства 200 энергопитания, способом, описанным выше. Затем устройство 180 управления выполняет управление наведением на основании информации о расстоянии, оцененном на основании условия подачи электрической энергии из блока 220 передачи энергии в блок 110 приема энергии (второе управление наведением) (этап S70).
Во время второго управления наведением устройство 180 управления определяет, стало или нет расстояние между блоком 220 передачи энергии и блоком 110 приема энергии минимальным расстоянием, на основании дифференциального значения расстояния между блоком 220 передачи энергии и блоком 110 приема энергии, способом, описанным выше (этап S80). Если определено, что расстояние между блоком 220 передачи энергии и блоком 110 приема энергии стало минимальным расстоянием (Да на этапе S80), устройство 180 управления побуждает транспортное средство остановиться и активизирует электрический стояночный тормоз (этап S90).
После этого устройство 180 управления передает команду подачи электрической энергии для действительной подачи электрической энергии из устройства 200 энергопитания на электрически питаемое транспортное средство 100 в устройство 200 энергопитания через блок 130 связи (этап S100). Кроме того, устройство 180 управления включает главное реле SMR2 системы и приводит в действие преобразователь 142 DC/DC, и выполняет управление зарядкой устройства 150 накопления энергии (этап S110).
В устройстве 200 энергопитания, если блок 240 связи принимает команду активации, переданную с электрически питаемого транспортного средства 100 (Да на этапе S200), ECU 270 активизирует устройство 200 энергопитания (этап S210). Затем, если блок 240 связи принимает команду излучения, переданную с электрически питаемого транспортного средства 100 (Да на этапе S220), ECU 270 засвечивает светоизлучающие блоки 230 (этап S230). Затем, если блок 240 связи принимает сигнал во время управления наведением, переданный с электрически питаемого транспортного средства 100 (Да на этапе S240), ECU 270 управляет выходом формирователя 260 высокочастотной энергии для выдачи предварительно определенной электрической энергии, меньшей, чем во время зарядки (этап S250).
Во время приема сигнала во время управления наведением, ECU 270 передает детектированное значение для напряжения VS с датчика 272 напряжения, которое указывает величину напряжения, выдаваемого из устройства 200 энергопитания, и детектированное значение для тока IS с датчика 274 тока, которое указывает величину тока, выдаваемого из устройства 200 энергопитания, в качестве информации об электрической энергии касательно устройства 200 энергопитания на электрически питаемое транспортное средство 100 через блок 240 связи (этап S260).
Затем, если блок 240 связи принимает команду подачи электрической энергии, переданную с электрически питаемого транспортного средства 100 (Да на этапе S270), ECU 270 управляет выходом из формирователя 260 высокочастотной энергии, для выдачи энергии зарядки для зарядки транспортного средства (этап S280).
Как описано выше, в настоящем варианте осуществления управление парковкой электрически питаемого транспортного средства 100 выполняется в две стадии. На первой стадии взаимное расположение между блоком 220 передачи энергии и блоком 110 приема энергии считывается на основании информации изображения с камеры 120, заключенной в транспортном средстве, и транспортное средство управляется таким образом, чтобы оно наводилось на блок 220 передачи энергии на основании считанного результата (первое управление наведением). На второй стадии расстояние L между блоком 220 передачи энергии и блоком 110 приема энергии считывается на основании условий подачи электрической энергии из блока 220 передачи энергии в блок 110 приема энергии. Затем, когда транспортное средство приближается к блоку 220 передачи энергии настолько близко, что блок 220 передачи энергии находится под кузовом транспортного средства, и камера 120 больше не может захватывать изображение блока 220 передачи энергии, транспортное средство управляется таким образом, чтобы блок 220 передачи энергии выравнивался с блоком 110 приема энергии, на основании информации о расстоянии между блоком 220 передачи энергии и блоком 110 приема энергии, считанной на основании условия подачи электрической энергии из блока 220 передачи энергии в блок 110 приема энергии (второе управление наведением). По существу, выравнивание блока 220 передачи энергии устройства 200 энергопитания с блоком 110 приема энергии, заключенным в транспортном средстве, может выполняться без предоставления крупногабаритного оборудования. Поэтому согласно настоящему изобретению система энергопитания для транспортного средства 10 может быть осуществлена простой конструкцией наряду с тем, что обеспечивается точность парковки по отношению к устройству 200 энергопитания.
В варианте осуществления, описанном выше, выполняется управление наведением на основании информации изображения (первое управление наведением), когда расстояние между устройством 200 энергопитания и электрически питаемым транспортным средством 100 велико, а управление наведением на основании информации о расстоянии, которое требует передачи электрической энергии из блока 220 передачи энергии (второе управление наведением) выполняется после того, как расстояние между устройством 200 энергопитания и электрически питаемым транспортным средством 100 становится меньше. Дополнительно выход электрической энергии из блока 220 передачи энергии во время второго управления наведением является меньшим, чем выход электрической энергии после того, как начато управление зарядкой. Поэтому согласно настоящему изобретению потребление электрической энергии может сдерживаться.
В варианте осуществления, описанном выше, устройство 200 энергопитания активизируется в ответ на команду из электрически питаемого транспортного средства 100, которое принимает электрическую энергию из устройства 200 энергопитания, и светоизлучающие блоки 230 излучают в ответ на команду из электрически питаемого транспортного средства 100. Поэтому согласно настоящему варианту осуществления излишнее потребление электрической энергии может подавляться, в то время как транспортное средство не заряжается.
Хотя переключение с первого управления наведением на основании информации изображения из камеры 120 на второе управление наведением на основании информации о расстоянии выполняется, когда блок 220 передачи энергии входит в мертвую зону камеры 120, в варианте осуществления, описанном выше, переключение с первого управления наведением на второе управление наведением может выполняться, когда транспортное средство оказывается в пределах предварительно определенного расстояния от блока 220 передачи энергии. Например, расстояние, которое предоставляет блоку 110 приема энергии возможность принимать электрическую энергию из блока 220 передачи энергии, может быть установлено в качестве предварительно определенного расстояния.
Хотя информация об электрической энергии касательно устройства 200 энергопитания передается на электрически питаемое транспортное средство 100, а информация о расстоянии формируется на стороне транспортного средства на основании информации об электрической энергии, в вышеприведенном описании информация о расстоянии может формироваться на стороне устройства 200 энергопитания и передаваться на электрически питаемое транспортное средство 100 на основании выходного тока в устройстве 200 энергопитания или посредством передачи принимаемого напряжения на транспортном средстве с электрически питаемого транспортного средства 100 в устройство 200 энергопитания. В качестве альтернативы устройство 200 энергопитания может иметь информацию о расстоянии и определять, было или нет завершено второе управление наведением, на основании информации о расстоянии.
Хотя акселератор и тормоз управляются водителем во время первого управления наведением и автоматически управляются во время второго управления наведением в вышеприведенном описании, акселератор и тормоз также могут автоматически управляться во время первого управления наведением или также могут управляться водителем во время второго управления наведением.
Хотя камера 120 предусмотрена в задней части транспортного средства в вышеприведенном описании, место, где установлена камера 120, не ограничено задней частью транспортного средства.
Хотя электрическая энергия передается из устройства 200 передачи энергии на электрически питаемое транспортное средство 100 бесконтактным образом посредством резонанса в вышеприведенном описании, способ передачи энергии из устройства 200 передачи энергии на электрически питаемое транспортное средство 100 необязательно ограничен резонансом. Могут применяться другие бесконтактные способы передачи энергии, такие как передача энергии с использованием электромагнитной индукции и передача энергии с использованием микроволн. К тому же с этими способами передачи энергии расстояние между блоком передачи энергии и блоком приема энергии может оцениваться на основании условий подачи электрической энергии из устройства энергопитания на транспортное средство.
Хотя положение и ориентация блока 220 передачи энергии распознаются посредством распознавания изображений на основании светоизлучающих блоков 230 в вышеприведенном описании, форма и тому подобное блока 220 передачи энергии может распознаваться посредством распознавания изображений без предоставления светоизлучающих блоков 230. Посредством предоставления светоизлучающих блоков 230, как в варианте осуществления, описанном выше, положение и ориентация блока 220 передачи энергии могут распознаваться даже в ночное время.
Хотя электрическая энергия передается благодаря резонансу пары саморезонансных обмоток в вышеприведенном описании, высокодиэлектрический диск, изготовленный из материала с высокой диэлектрической постоянной, может использоваться вместо саморезонансных обмоток в качестве резонатора.
Хотя автомобиль с последовательно/параллельным гибридным приводом, способный к делению механической энергии двигателя 176 устройством 177 деления энергии для передачи результирующей энергии на ведущее колесо 178 и двигатель-генератор 172, описан в качестве электрически питаемого транспортного средства в вышеприведенном описании, настоящее изобретение также применимо к гибридным автомобилям других типов. То есть настоящее изобретение, например, также применимо к так называемому автомобилю с последовательным гибридным приводом, который использует двигатель 176 только для приведения в действие двигатель-генератора 172 и вырабатывает движущую силу автомобиля только двигатель-генератором 174, гибридному автомобилю, в котором только рекуперативная энергия из кинетической энергии, вырабатываемой двигателем 176, восстанавливается в качестве электрической энергии, гибридному автомобилю, работающему при содействии электропривода, в котором двигатель используется для основной механической энергии, а электропривод содействует двигателю по необходимости и тому подобному.
Настоящее изобретение также применимо к электрическому транспортному средству, не включающему в себя двигатель 176, но перемещающемуся только электрической энергией, и автомобилю на топливных элементах, включающему в себя топливный элемент в дополнение к устройству 150 накопления энергии в качестве источника питания постоянного тока. Настоящее изобретение также применимо к электрически питаемому транспортному средству, не включающему в себя преобразователь 162 с повышением напряжения, и электрически питаемому транспортному средству, не включающему в себя преобразователь 142 DC/DC.
В вышеприведенном описании камера 120 и IPA-ECU 410 образуют «первое средство считывания» (первый блок считывания) в настоящем изобретении, а IPA-ECU 410 и EPS 420 образуют «первое средство управления наведением» (первый блок управления наведением) в настоящем изобретении. Резонансный ECU 460 соответствует «второму средству считывания» (второму блоку считывания) в настоящем изобретении, а HV-ECU 470, MG-ECU 430 и ECB 440 образуют «второе средство управления наведением» (второй блок управления наведением) в настоящем изобретении.
В дополнение камера 120 соответствует «устройству захвата изображения» в настоящем изобретении, а IPA-ECU 410 соответствует «блоку распознавания изображений» в настоящем изобретении. Блоки 130, 240 связи образуют «средство связи» в настоящем изобретении, а первичная саморезонансная катушка 224 соответствует «катушке передачи энергии» в настоящем изобретении. Вторичная саморезонансная катушка 112 соответствует «катушке приема энергии» в настоящем изобретении, а резонансный ECU 460 соответствует «блоку оценки расстояния» в настоящем изобретении. EPS 420 соответствует «первому блоку управления» в настоящем изобретении, а MG-ECU 430 и ECB 440 образуют «второй блок управления» в настоящем изобретении. Формирователь 260 высокочастотной энергии и ECU 270 образуют «блок управления электропитанием» в настоящем изобретении.
Должно быть понятно, что варианты осуществления, раскрытые в материалах настоящей заявки, являются иллюстративными, а не ограничивающими, во всех отношениях. Объем настоящего изобретения определен терминами скорее формулы изобретения, чем описания вариантов осуществления, приведенных выше, и подразумевается включающим в себя любые модификации в пределах объема и смысла, эквивалентных терминам формулы изобретения.
ОПИСАНИЕ ССЫЛОЧНЫХ СИМВОЛОВ
10 система энергопитания для транспортного средства; 100 электрически питаемое транспортное средство; 110 блок приема энергии; 112, 340 вторичная саморезонансная катушка; 114, 350 вторичная катушка; 120 камера; 130, 240 блок связи; 140 выпрямитель; 142 преобразователь постоянного тока в постоянный ток (DC/DC); 150 устройство накопления энергии; 162 преобразователь с повышением напряжения; 164, 166 инвертор; 172, 174 двигатель-генератор; 176 двигатель; 177 устройство деления энергии; 178 ведущее колесо; 180 устройство управления; 190, 272 датчик напряжения; 200 устройство энергопитания; 210 устройство блока питания; 220 блок передачи энергии; 222, 320 первичная катушка; 224, 330 первичная саморезонансная катушка; 230 светоизлучающий блок; 250 источник питания переменного тока; 260 формирователь высокочастотной энергии; 270 электронный блок управления (ECU); 274 датчик тока; 310 высокочастотный источник питания; 360 нагрузка; 410 IPA-ECU; 420 EPS; 430 MG-ECU; 440 ECB; 450 EPB; 460 резонансный ECU; 470 HV-ECU; SMR1, SMR2 главное реле системы; PL1, PL2 линия положительного электрода; NL линия отрицательного электрода.
Группа изобретений относится к системе энергопитания для транспортного средства и транспортному средству. Система содержит первое средство считывания взаимного расположения между блоком передачи энергии и блоком приема энергии, первое средство управления наведением транспортного средства, второе средство считывания расстояния между блоком передачи энергии и блоком приема энергии, второе средство управления наведением транспортного средства. Блок передачи энергии размещен на земле. Блок приема энергии размещен на нижней части кузова транспортного средства. Транспортное средство содержит блок приема энергии, первый блок считывания положения блока передачи энергии, первый блок управления наведением транспортного средства, второй блок считывания расстояния между блоком передачи энергии и блоком приема энергии, второй блок управления наведением транспортного средства. Первый блок считывания включает в себя устройство захвата изображения для захвата изображения извне транспортного средства. Блок распознавания изображений для распознавания положения блока передачи энергии. Технический результат заключается в повышении точности парковки по отношению к устройству энергопитания. 2 н. и 13 з.п. ф-лы, 11 ил.
1. Система энергопитания для транспортного средства для подачи электрической энергии из блока передачи энергии устройства (200) энергопитания, предусмотренного вне транспортного средства (100), в блок (110) приема энергии, находящийся в транспортном средстве, бесконтактным образом, содержащая: первое средство (120, 410) считывания для считывания взаимного расположения между блоком передачи энергии и блоком приема энергии, первое средство (410, 420) управления наведением для управления транспортным средством, таким образом, чтобы транспортное средство было наведено на блок передачи энергии на основании считанного результата первым средством считывания, второе средство (460) считывания для считывания расстояния между блоком передачи энергии и блоком приема энергии на основании условия подачи электрической энергии из блока передачи энергии в блок приема энергии, и второе средство (470, 420, 430, 440) управления наведением для управления транспортным средством, таким образом, чтобы положение блока приема энергии было настроено на положение блока передачи энергии на основании считанного результата вторым средством считывания, когда транспортное средство оказывается в пределах расстояния от блока передачи энергии, предписанного первым средством управления наведением, при этом блок передачи энергии размещен на земле, блок приема энергии размещен на нижней части кузова транспортного средства, площадь, где блок передачи энергии и блок приема энергии обращены друг к другу, является меньшей, чем площадь нижней части кузова транспортного средства, первое средство считывания включает в себя устройство (120) захвата изображения, находящееся на транспортном средстве, для захвата изображения извне транспортного средства, и блок (410) распознавания изображения для распознавания положения блока передачи энергии на основании изображения, захваченного устройством захвата изображения, при этом предписанное расстояние является расстоянием, которое не позволяет устройству захвата изображения захватывать изображение блока передачи энергии, когда транспортное средство приближается к блоку передачи энергии, и блок передачи энергии находится под кузовом транспортного средства.
2. Система по п.1, в которой предписанное расстояние является предварительно определенным расстоянием, которое предоставляет блоку приема энергии возможность принимать электрическую энергию из блока передачи энергии.
3. Система по п.1, дополнительно содержащая средство (130, 240) связи для осуществления связи между, транспортным средством и устройством энергопитания, при этом первое средство считывания дополнительно включает в себя светоизлучающий блок (230), указывающий положение блока передачи энергии, и светоизлучающий блок излучает свет после того, как связь между транспортным средством и устройством энергопитания установлена средством связи.
4. Система по п.3, в которой светоизлучающий блок излучает свет в ответ на команду, принятую из транспортного средства через средство связи.
5. Система по п.1, дополнительно содержащая средство (130, 240) связи для проведения связи между транспортным средством и устройством энергопитания, при этом устройство энергопитания активизируется в ответ на команду, принятую из транспортного средства через средство связи.
6. Система по п.1, в которой блок передачи энергии включает в себя катушку (224) передачи энергии для приема электрической энергии из источника питания, блок приема энергии включает в себя катушку (112) приема энергии для приема электрической энергии из катушки передачи энергии бесконтактным образом, и второе средство считывания включает в себя блок (460) оценки расстояния для оценки расстояния между блоком передачи энергии и блоком приема энергии на основании информации об электрической энергии, переданной из катушки передачи энергии на катушку приема энергии.
7. Система по п.1, в которой электрическая энергия, подаваемая из блока передачи энергии в блок приема энергии во время настройки положения блока приема энергии на положение блока передачи энергии вторым средством управления наведением, является меньшей, чем электрическая энергия, подаваемая из блока передачи энергии в блок приема энергии после завершения настройки.
8. Система по п.1, в которой первое средство управления наведением включает в себя первый блок (420) управления для рулевого управления транспортного средства на основании считанного результата первым средством считывания, и второе средство управления наведением включает в себя второй блок (430, 440) управления для управления приведением в движение и торможением транспортного средства на основании считанного результата вторым средством считывания.
9. Электрически питаемое транспортное средство, способное к перемещению электроприводом (174), посредством использования электроэнергии, подаваемой из блока (220) передачи энергии устройства (200) энергопитания, предусмотренного вне транспортного средства, содержащее: блок (110) приема энергии, сконфигурированный для приема электрической энергии, переданной из блока передачи энергии, бесконтактным образом, первый блок (120, 410) считывания для считывания положения блока передачи энергии, первый блок (410, 420) управления наведением для управления транспортным средством, таким образом, чтобы транспортное средство наводилось на блок передачи энергии на основании считанного результата первым блоком считывания, второй блок (460) считывания для считывания расстояния между блоком передачи энергии и блоком приема энергии на основании условия подачи электрической энергии из блока передачи энергии в блок приема энергии, и второй блок (470, 420, 430, 440) управления наведением для управления транспортным средством, таким образом, чтобы положение блока приема энергии было настроено на положение блока передачи энергии на основании считанного результата вторым блоком считывания, когда транспортное средство оказывается в пределах расстояния от блока передачи энергии, предписанного первым блоком управления наведением, при этом блок передачи энергии размещен на земле, блок приема энергии размещен на нижней части кузова транспортного средства, площадь, где блок передачи энергии и блок приема энергии обращены друг к другу, является меньшей, чем площадь нижней части кузова транспортного средства, первый блок считывания включает в себя устройство (120) захвата изображения для захвата изображения извне транспортного средства, и блок (410) распознавания изображений для распознавания положения блока передачи энергии на основании изображения, захваченного устройством захвата изображения, и предписанное расстояние является расстоянием, которое не позволяет устройству захвата изображения захватывать изображение блока передачи энергии, когда транспортное средство приближается к блоку передачи энергии, и блок передачи энергии находится под кузовом транспортного средства.
10. Электрически питаемое транспортное средство по п.9, в котором предписанное расстояние является предварительно определенным расстоянием, которое предоставляет блоку приема энергии возможность принимать электрическую энергию из блока передачи электрической энергии.
11. Электрически питаемое транспортное средство по п.9, дополнительно содержащее блок (130) связи для осуществления связи с устройством энергопитания, при этом устройство энергопитания включает в себя светоизлучающий блок (230), указывающий положение блока передачи энергии, а блок связи передает команду для излучения светоизлучающего блока к устройству энергопитания после того, как связь с устройством энергопитания установлена.
12. Электрически питаемое транспортное средство по п.9, дополнительно содержащее блок (130) связи для осуществления связи с устройством энергопитания, при этом блок связи передает команду для активации устройства энергопитания для устройства энергопитания.
13. Электрически питаемое транспортное средство по п.9, в котором блок передачи энергии включает в себя катушку (224) передачи энергии для приема электрической энергии из источника питания, блок приема энергии включает в себя катушку (112) приема энергии для приема электрической энергии из катушки передачи энергии бесконтактным образом, и второй блок считывания включает в себя блок (460) оценки расстояния для оценки расстояния между блоком передачи энергии и блоком приема энергии на основании информации об электрической энергии, переданной из катушки передачи энергии на катушку приема энергии.
14. Электрически питаемое транспортное средство по п.9, в котором электрическая энергия, подаваемая из блока передачи энергии в блок приема энергии во время настройки положения блока приема энергии на положение блока передачи энергии вторым блоком управления наведением, является меньшей, чем электрическая энергия, подаваемая из блока передачи энергии в блок приема энергии после завершения настройки положения блока приема энергии на положение блока передачи энергии.
15. Электрически питаемое транспортное средство по п.9, в котором первый блок управления наведением включает в себя первый блок (420) управления для рулевого управления транспортным средством на основании считанного результата первым блоком считывания, и второй блок управления наведением включает в себя второй блок (430, 440) управления для управления приведением в движение и торможением транспортного средства на основании считанного результата вторым блоком считывания.
| JP 10117407 А, 06.05.1998 | |||
| JP 2007097345 A, 12.04.2007 | |||
| СПОСОБ ПИТАНИЯ ЭЛЕКТРИЧЕСКИХ ТРАНСПОРТНЫХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2297928C1 |
| EP 0986034 A2, 15.03.2000. | |||

