ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к системе содействия при парковке транспортного средства, транспортному средству, включающему в себя систему содействия при парковке транспортного средства, и способу содействия при парковке транспортного средства, а в частности, к системе содействия при парковке транспортного средства и способу, который выполняет операцию содействия при парковке с использованием секции приема электрической энергии, которая принимает электрическую энергию бесконтактным образом, и к транспортному средству, включающему в себя систему содействия при парковке транспортного средства.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Транспортные средства, такие как полностью электрические транспортные средства и гибридные транспортные средства со штепсельным соединением, которые сконфигурированы с возможностью заряжать устройство накопления электричества в транспортном средстве от внешнего источника питания, используются в настоящее время. Изучаемыми являются технологии для автоматической зарядки и технологии для направления транспортного средства с этой целью.
Публикация японской патентной заявки № 2007-97345 (JP-A-2007-97345) описывает технологию выполнения управления содействием при совмещении, в которой распознается позиция индикатора, когда индикатор блока передачи электрической энергии находится рядом с целевой позицией парковки в изображении, захваченном камерой заднего вида, которая захватывает изображение области рядом с транспортным средством.
Однако, технологии, описанные в JP-A-2007-97345, не принимают во внимание тот факт, что индикатор блока передачи электрической энергии может размещаться в слепой зоне камеры заднего вида. В частности, если не предотвращается переезд транспортным средством заданной позиции, когда транспортное средство приближается к блоку передачи электрической энергии, может возникнуть ситуация, в которой транспортное средство непреднамеренно приходит в соприкосновение с блоком передачи электрической энергии и т.д. С другой стороны, когда вызывается остановка транспортного средства задолго до блока передачи электрической энергии, чтобы избежать переезда заданной позиции, может возникать ситуация, в которой позиция транспортного средства не подходит для выполнения зарядки. Таким образом, существует возможность улучшения для точного направления транспортного средства даже после того, как индикатор попадает в слепую зону камеры.
КРАТКОЕ ОПИСАНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Изобретение предоставляет систему и способ содействия при парковке транспортного средства, с помощью которых возможно минимизировать позиционное отклонение от позиции парковки, в которой транспортное средство должно быть остановлено, и предоставляет транспортное средство, включающее в себя систему содействия при парковке транспортного средства.
Первым аспектом изобретения является система содействия при парковке транспортного средства, включающая в себя: камеру, которая захватывает изображение области рядом с транспортным средством; первую направляющую секцию транспортного средства, которая распознает позицию блока передачи электрической энергии, внешнего по отношению к транспортному средству, на основе изображения, полученного через камеру, чтобы направлять транспортное средство к блоку передачи электрической энергии; секцию приема электрической энергии, которая принимает электрическую энергию от блока передачи электрической энергии бесконтактным образом; вторую направляющую секцию транспортного средства, которая направляет транспортное средство на основе электрической энергии, принятой секцией приема электрической энергии; и секцию управления, которая вызывает перемещение транспортного средства посредством управления секцией приведения в движение транспортного средства, которая приводит в движение транспортное средство, на основе выходных сигналов из первой и второй направляющих секций транспортного средства. Секция управления выполняет процесс остановки транспортного средства, когда электрическая энергия, принятая секцией приема электрической энергии от блока передачи электрической энергии, не удовлетворяет первому условию, заключающемуся в том, что электрическая энергия равна или выше, чем первое пороговое значение, даже после того как секция управления вызвала перемещение транспортного средства под воздействием секции приведения в движение транспортного средства на предварительно определенное расстояние, после того как первая направляющая секция транспортного средства не может детектировать позицию блока передачи электрической энергии на основе изображения.
Первое пороговое значение заранее может быть определено посредством измерения соотношения между расстоянием между блоком передачи электрической энергии и секцией приема электрической энергии и напряжением.
Секция управления может останавливать прием электрической энергии через секцию приема электрической энергии и прекращать направление, выполняемое второй направляющей секцией транспортного средства, когда электрическая энергия, принятая секцией приема электрической энергии от блока передачи электрической энергии, не удовлетворяет первому условию, даже после того как секция управления вызывает перемещение транспортного средства под воздействием секции приведения в движение транспортного средства на предварительно определенное расстояние, после того как первая направляющая секция транспортного средства не может детектировать позицию блока передачи электрической энергии на основе изображения.
Секция управления может прекращать направление, выполняемое второй направляющей секцией транспортного средства, и начинать подготовку к зарядке устройства накопления электричества в транспортном средстве через блок передачи электрической энергии, когда электрическая энергия, принятая секцией приема электрической энергии от блока передачи электрической энергии, удовлетворяет первому условию, прежде чем транспортное средство переместилось на предварительно определенное расстояние, после того как первая направляющая секция транспортного средства не может детектировать позицию блока передачи электрической энергии на основе изображения.
Может быть применена конфигурация, в которой, после того как секция управления автоматически останавливает транспортное средство и прекращает направление, выполняемое второй направляющей секцией транспортного средства, секция управления повторно начинает передавать или принимать электрическую энергию через секцию приема электрической энергии в ответ на инструкцию от оператора, и секция управления начинает зарядку устройства накопления электричества в транспортном средстве через блок передачи электрической энергии, когда электрическая энергия, принятая секцией приема электрической энергии от блока передачи электрической энергии, удовлетворяет второму условию, заключающемуся в том, что электрическая энергия равна или выше, чем второе пороговое значение, и, с другой стороны, секция управления предупреждает оператора, когда электрическая энергия, принятая секцией приема электрической энергии от блока передачи электрической энергии, не удовлетворяет второму условию.
Второе пороговое значение может быть меньше, чем первое пороговое значение.
Второе пороговое значение может быть определено на основе допустимой потери напряженности электромагнитного поля, которая является напряженностью электромагнитного поля, которая теряется, когда передача и прием энергии выполняется при максимальной выходной энергии.
Инструкция может быть предоставлена оператором посредством приведения секции приведения в движение транспортного средства в состояние парковки.
Секция приема электрической энергии может включать в себя принимающую электрическую энергию катушку, которая принимает электрическую энергию бесконтактным образом через резонанс электромагнитного поля от передающей электрическую энергию катушки блока передачи электрической энергии.
Вторым аспектом изобретения является транспортное средство, включающее в себя вышеописанную систему содействия при парковке транспортного средства.
Третьим аспектом изобретения является способ содействия при парковке транспортного средства, включающий в себя этапы, на которых: распознают позицию блока передачи электрической энергии, внешнего по отношению к транспортному средству, на основании изображения, полученного через камеру, которая захватывает изображение области рядом с транспортным средством; направляют транспортное средство к блоку передачи электрической энергии на основе изображения; принимают электрическую энергию от блока передачи электрической энергии через секцию приема электрической энергии, которая принимает электрическую энергию бесконтактным образом; направляют транспортное средство на основе электрической энергии, принятой секцией приема электрической энергии; вызывают перемещение транспортного средства посредством выполнения управления для приведения в движение транспортного средства, согласно направлению на основе изображения и направлению на основе электрической энергии; и останавливают транспортное средство, когда электрическая энергия, принятая секцией приема электрической энергии от блока передачи электрической энергии, не удовлетворяет первому условию, заключающемуся в том, что электрическая энергия равна или выше, чем первое пороговое значение, даже после того как транспортное средство переместилось за пределы предварительно определенного расстояния, после того как становится невозможным детектировать позицию блока передачи электрической энергии на основе изображения.
Первое пороговое значение может быть заранее получено посредством измерения соотношения между расстоянием между блоком передачи электрической энергии и секцией приема электрической энергии и напряжением.
Способ содействия при парковке транспортного средства может дополнительно включать в себя остановку приема электрической энергии через секцию приема электрической энергии и прекращение направления на основе электрической энергии, когда электрическая энергия, принятая секцией приема электрической энергии от блока передачи электрической энергии, не удовлетворяет первому условию, даже после того как транспортное средство переместилось за пределы предварительно определенного расстояния, после того как становится невозможным детектировать позицию блока передачи электрической энергии на основе изображения.
Способ содействия при парковке транспортного средства может дополнительно включать в себя прекращение направления на основе электрической энергии и начало подготовки к зарядке устройства накопления электричества в транспортном средстве через блок передачи электрической энергии, когда электрическая энергия, принятая секцией приема электрической энергии от блока передачи электрической энергии, удовлетворяет первому условию, прежде чем транспортное средство переместилось на предварительно определенное расстояние, после того как становится невозможным детектировать позицию блока передачи электрической энергии на основе изображения.
Способ содействия при парковке транспортного средства может дополнительно включать в себя этапы, на которых: повторно запускают передачу или прием электрической энергии через секцию приема электрической энергии в ответ на инструкцию от оператора после того как транспортное средство автоматически останавливается, и направление на основе электрической энергии прекращается; начинают зарядку устройства накопления электричества в транспортном средстве через блок передачи электрической энергии, когда электрическая энергия, принятая секцией приема электрической энергии от блока передачи электрической энергии, удовлетворяет второму условию, заключающемуся в том, что электрическая энергия равна или выше, чем второе пороговое значение; и предупреждают оператора, когда электрическая энергия, принятая секцией приема электрической энергии от блока передачи электрической энергии, не удовлетворяет второму условию.
Согласно изобретению, во время операции содействия при парковке транспортного средства, даже после того как транспортное средство становится близким к позиции парковки, транспортное средство точно направляют, и переезд заданной позиции наблюдают и предотвращают, так что возможно минимизировать позиционное отклонение от позиции парковки, в которой транспортное средство должно быть остановлено.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения изобретения со ссылками на сопроводительные чертежи, на которых:
Фиг. 1 изображает общую схему конфигурации системы подачи энергии транспортного средства согласно варианту осуществления изобретения;
Фиг. 2 изображает схему для пояснения принципов передачи энергии с помощью резонансного способа;
Фиг. 3 изображает диаграмму, показывающую соотношения между расстоянием от источника электрического тока (магнитного источника тока) и напряженностью электромагнитного поля;
Фиг. 4 изображает схему для пояснения проблемы, которая может возникнуть, когда транспортное средство направляется с помощью камеры 120, показанной на фиг. 1;
Фиг. 5 изображает схему, показывающую схематическую конфигурацию, связанную с передачей и приемом энергии между транспортным средством и устройством подачи энергии, показанным в этом варианте осуществления;
Фиг. 6 изображает схему конфигурации, показывающую детали транспортного средства 100, показанного на фиг. 1 и 5;
Фиг. 7 изображает принципиальную схему для пояснения блока 110 приема электрической энергии на стороне транспортного средства и блока 220 передачи электрической энергии на стороне устройства подачи энергии более подробно;
Фиг. 8 изображает функциональную блок-схему контроллера 180, показанного на фиг. 6;
Фиг. 9 изображает блок-схему алгоритма (первая половина) для пояснения управления, выполняемого на этапе регулировки позиции транспортного средства, когда выполняется бесконтактная подача энергии;
Фиг. 10A и 10B изображают блок-схему алгоритма (вторая половина) для пояснения управления, выполняемого на этапе регулировки позиции транспортного средства, когда выполняется бесконтактная подача энергии;
Фиг. 11 изображает диаграмму, показывающую соотношение между расстоянием перемещения транспортного средства и напряжением принятой энергии;
Фиг. 12 изображает блок-схему алгоритма для пояснения детектирования расстояния перемещения транспортного средства, выполненного на этапе S10 на фиг. 10A;
Фиг. 13 изображает временную диаграмму сигналов операции, показывающую пример операции, в которой настройка скорости транспортного средства устанавливается в ноль согласно блок-схеме алгоритма, показанной на фиг. 12; и
Фиг. 14 изображает блок-схему алгоритма для пояснения процесса режима 2 работы, выполняемого на этапе S20 на фиг. 10A и 10B.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Вариант осуществления изобретения будет описан подробно ниже со ссылкой на чертежи. Отметим, что одинаковые или соответствующие участки на чертежах обозначаются одинаковым ссылочным номером, и их описание не повторяется.
Фиг. 1 изображает общую схему конфигурации системы подачи энергии транспортного средства согласно варианту осуществления изобретения. Обращаясь к фиг. 1, система 10 подачи энергии транспортного средства включает в себя транспортное средство 100 и устройство 200 подачи энергии. Транспортное средство 100 включает в себя блок 110 приема электрической энергии, камеру 120 и блок 130 связи.
Блок 110 приема электрической энергии устанавливается на днище кузова транспортного средства и конфигурируется с возможностью принимать, бесконтактным образом, электрическую энергию, отправленную из блока 220 передачи электрической энергии устройства 200 подачи энергии. Более конкретно, блок 110 приема электрической энергии включает в себя саморезонирующую катушку, которая должна быть описана ниже, и принимает, бесконтактным образом, электрическую энергию от блока 220 передачи электрической энергии, резонируя с саморезонирующей катушкой, включенной в блок 220 передачи электрической энергии, через электромагнитное поле. Камера 120 предусматривается, чтобы детектировать позиционное соотношение между блоком 110 приема электрической энергии и блоком 220 передачи электрической энергии, и устанавливается на кузове транспортного средства с тем, чтобы иметь возможность захватывать изображение заднего вида из транспортного средства, например. Блок 130 связи является интерфейсом связи для связи между транспортным средством 100 и устройством 200 подачи энергии.
Устройство 200 подачи энергии включает в себя высокочастотное устройство 210 подачи энергии, блок 220 передачи электрической энергии, светящийся участок 230 и блок 240 связи. Высокочастотное устройство 210 подачи энергии преобразует промышленную электрическую энергию переменного тока (AC), подаваемую из системы подачи энергии, в высокочастотную электрическую энергию и выводит высокочастотную электрическую энергию в блок 220 передачи электрической энергии. Частота высокочастотной энергии переменного тока, сгенерированной высокочастотным устройством 210 подачи энергии, равна, например, одному мегагерцу или нескольким десяткам мегагерц.
Блок 220 передачи электрической энергии закрепляется на полу парковочной площадки или стоянки автомобилей и конфигурируется с возможностью передавать блоку 110 приема электрической энергии транспортного средства 100 бесконтактным образом высокочастотную энергию переменного тока, подаваемую от высокочастотного устройства 210 подачи энергии. Более конкретно, блок 220 передачи электрической энергии включает в себя саморезонирующую катушку и передает, бесконтактным образом, электрическую энергию блоку 110 приема электрической энергии, резонируя с саморезонирующей катушкой, включенной в блок 110 приема электрической энергии, через электромагнитное поле. Множество светящихся участков 230 предусмотрены в блоке 220 передачи электрической энергии с тем, чтобы указывать позицию блока 220 передачи электрической энергии. Примеры светящегося участка 230 включают в себя светодиоды. Блок 240 связи является интерфейсом связи для связи между устройством 220 подачи энергии и транспортным средством 100.
В этой системе 10 подачи энергии транспортного средства высокочастотная энергия переменного тока передается от блока 220 передачи электрической энергии устройства 200 подачи энергии, и саморезонирующая катушка, включенная в блок 110 приема электрической энергии транспортного средства 100, и саморезонирующая катушка, включенная в блок 220 передачи электрической энергии, резонируют друг с другом через электромагнитное поле, таким образом, подавая электрическую энергию от устройства 200 подачи энергии к транспортному средству 100.
Когда электрическая энергия подается от устройства 200 подачи энергии к транспортному средству 100, необходимо совмещать блок 110 приема электрической энергии транспортного средства 100 и блок 220 передачи электрической энергии устройства 200 подачи энергии, направляя транспортное средство 100 к устройству 200 подачи энергии.
Совмещение проводится следующим образом. На первом этапе, позиционное соотношение между блоком 110 приема электрической энергии транспортного средства 100 и блоком 220 передачи электрической энергии устройства 200 подачи энергии детектируется на основе изображения, захваченного камерой 120, и транспортное средство управляется на основе результата детектирования, так что транспортное средство направляется к блоку 220 передачи электрической энергии. Более конкретно, множество светящихся участков 230, предусмотренных в блоке 220 передачи электрической энергии, захватываются камерой 120, и позиции и ориентации множества светящихся участков 230 распознаются посредством распознавания изображения. Затем, на основе результата распознавания изображения, относительная позиция и ориентация между блоком 220 передачи электрической энергии и транспортным средством распознаются, и транспортное средство направляется к блоку 220 передачи электрической энергии на основе результата распознавания.
Поскольку область, в которой блок 110 приема электрической энергии и блок 220 передачи электрической энергии обращены друг к другу, меньше, чем область поверхности днища кузова транспортного средства, блок 220 передачи электрической энергии не может быть захвачен камерой 120, когда блок 220 передачи электрической энергии попадает под кузов транспортного средства. Когда это происходит, управление совмещением переключается с первого этапа на второй этап. На втором этапе электрическая энергия подается от блока 220 передачи электрической энергии к блоку 110 приема электрической энергии, и расстояние между блоком 220 передачи электрической энергии и блоком 110 приема электрической энергии детектируется на основе состояния подачи энергии. На основе этой информации о расстоянии транспортное средство управляется так, что блок 220 передачи электрической энергии и блок 110 приема электрической энергии совмещаются друг с другом.
Величина электрической энергии, переданной в качестве тестового сигнала от блока 220 передачи электрической энергии на втором этапе, устанавливается меньшей, чем электрическая энергия заряда, подаваемая от блока 220 передачи электрической энергии к блоку 110 приема электрической энергии после завершения совмещения блока 220 передачи электрической энергии с блоком 110 приема электрической энергии. Причиной того, почему электрическая энергия передается от блока 220 передачи электрической энергии на втором этапе, является необходимость детектирования расстояния между блоком 220 передачи электрической энергии и блоком 110 приема электрической энергии, и, с этой целью электрическая энергия с большим значением, которая должна использоваться, когда выполняется основная операция подачи энергии, не нужна.
Далее, будет описан бесконтактный способ подачи энергии, используемый в системе 10 подачи энергии транспортного средства, согласно этому варианту осуществлении. В системе 10 подачи энергии транспортного, средства согласно этому варианту осуществления, электрическая энергия подается от устройства 200 подачи энергии к транспортному средству 100 резонансным способом.
Фиг. 2 изображает схему для пояснения принципов передачи энергии с помощью резонансного способа. Обращаясь к фиг. 2, в резонансном способе, как и в случае резонанса двух камертонов, электрическая энергия передается от одной катушки к другой катушке через электромагнитное поле вследствие резонанса двух катушек LC-резонанса, имеющих одинаковую частоту собственных колебаний в электромагнитном поле (ближнее поле).
В частности, первичная катушка 320 подключается к высокочастотному источнику 310 электрической энергии переменного тока, и энергия переменного тока высокой частоты от одного мегагерца до нескольких десятков мегагерц подается, посредством электромагнитной индукции, к первичной саморезонирующей катушке 330, которая магнитным образом связана с первичной катушкой 320. Первичная саморезонирующая катушка 330 является LC-резонатором, использующим индуктивность самой катушки и паразитную емкость, и первичная саморезонирующая катушка 330 резонирует с вторичной саморезонирующей катушкой 340, имеющей такую же резонансную частоту, что и первичная саморезонирующая катушка 330, через электромагнитное поле (ближнее поле). Как результат, энергия (электрическая энергия) передается от первичной саморезонирующей катушки 330 к вторичной саморезонирующей катушке 340 через электромагнитное поле. Энергия (электрическая энергия), передаваемая к вторичной саморезонирующей катушке 340, принимается, посредством электромагнитной индукции, вторичной катушкой 350, которая магнитным образом связана с вторичной саморезонирующей катушкой 340, и затем подается к нагрузке 360. Передача электрической энергии резонансным способом выполняется, когда коэффициент (Q) добротности, который указывает интенсивность резонанса первичной саморезонирующей катушки 330 и вторичной саморезонирующей катушки 340, больше 100, например.
Что касается соответствий между фиг. 1 и фиг. 2, блок 110 приема электрической энергии на фиг. 1 соответствует вторичной саморезонирующей катушке 340 и вторичной катушке 350, а блок 220 передачи электрической энергии на фиг. 1 соответствует первичной катушке 320 и первичной саморезонирующей катушке 330.
Фиг. 3 изображает диаграмму, показывающую соотношения между расстоянием от источника электрического тока (магнитного источника тока) и напряженностью электромагнитного поля. Обращаясь к фиг. 3, электромагнитное поле включает в себя три составляющих. Кривая k1 представляет составляющую, которая обратно пропорциональна расстоянию от источника электромагнитной волны и называется "полем излучения". Кривая k2 представляет составляющую, которая обратно пропорциональна квадрату расстояния от источника электромагнитной волны и называется "полем индукции". Кривая k3 представляет составляющую, которая обратно пропорциональна кубу расстояния от источника электромагнитной волны и называется "статическим полем".
Эти составляющие имеют область, в которой напряженность электромагнитной волны круто уменьшается с расстоянием от источника электромагнитной волны, и это ближнее поле (непостоянное поле) используется, чтобы передавать энергию (электрическую энергию) в резонансном способе. В частности, с помощью ближнего поля, заставляя пару резонаторов (пару катушек LC-резонанса, например), имеющих одинаковую частоту собственных колебаний, резонировать друг с другом, энергия (электрическая энергия) передается от одного резонатора (первичной саморезонирующей катушки) к другому резонатору (вторичной саморезонирующей катушке). Поскольку ближнее поле не передает энергию (электрическую энергию) далеко, резонансный способ может передавать энергию с более низкой потерей энергии по сравнению со случаем, где электромагнитные волны используются, чтобы передавать энергию (электрическую энергию) с помощью "поля излучения", которое передает энергию на дальнее расстояние.
Фиг. 4 изображает схему для пояснения проблемы, которая может возникать, когда транспортное средство направляется с помощью камеры 120, показанной на фиг. 1.
Обращаясь к фиг. 4, когда блок 220 передачи электрической энергии находится в позиции 220A, блок 220 передачи электрической энергии находится в поле зрения камеры 120, и операция содействия при парковке может выполняться с помощью камеры 120. Однако когда блок 110 приема электрической энергии устанавливается в или на поверхности днища транспортного средства, необходимо перемещать транспортное средство 100 так, что блок 220 передачи электрической энергии оказывается в позиции 220B. Окрестность позиции 220B находится в слепой зоне камеры 120, и, следовательно, операция содействия при парковке с помощью изображения, захваченного камерой 120, не может быть выполнена.
Возможно, что операция содействия при парковке с помощью камеры 120 выполняется до некоторой степени, и позиция затем оценивается. Однако это может вызывать несовпадение, и существует вероятность того, что передача и прием электрической энергии не смогут выполняться хорошо. Кроме того, существует вероятность того, что передние колеса наезжают на блок 220 передачи электрической энергии, или транспортное средство контактирует с другим препятствием, когда транспортное средство чрезмерно перемещается назад.
По этой причине, в этом варианте осуществления, после того как блок 220 передачи электрической энергии оказывается в слепой зоне камеры 120, выполняется передача и прием электрической энергии с низким значением между блоком 220 передачи электрической энергии и блоком 110 приема электрической энергии, и на основе передачи и приема электрической энергии с низким значением выполняется операция содействия при парковке. Это делает возможным точное указание позиции парковки, даже после того как блок 220 передачи электрической энергии попадает под транспортное средство, как показано позицией 220B.
Для того, чтобы предохранять транспортное средство 100 от чрезмерного перемещения, вызывающего наезд переднего колеса на блок 220 передачи электрической энергии или вызывающего контакт транспортного средства 100 с другим препятствием, выполняется управление, чтобы останавливать транспортное средство 100, когда электрическая энергия не принимается хорошо блоком 110 приема электрической энергии, даже после того как транспортное средство 100 переместилось так, что блок 220 передачи электрической энергии попадает за предполагаемый диапазон, как показано позицией 220C. Например, водитель предупреждается об остановке транспортного средства 100, или транспортное средство автоматически останавливается, когда не найдена позиция, в которой блок 110 приема электрической энергии может принимать электрическую энергию в хороших условиях, даже после того как транспортное средство 100 переместилось на расстояние L1 (1,5 м, например), после того как часть блока 220 передачи электрической энергии попадает в слепую зону камеры 120. Расстояние L1 определяется в зависимости от предела точности совмещения, проводимого с помощью блока 110 приема электрической энергии.
Фиг. 5 изображает схему, показывающую схематическую конфигурацию, связанную с передачей и приемом энергии между транспортным средством и устройством подачи энергии, показанным в этом варианте осуществления.
Обращаясь к фиг. 5, устройство 200 подачи энергии включает в себя блок 220 передачи электрической энергии, высокочастотное устройство 210 подачи энергии и блок 240 связи. Транспортное средство 100 включает в себя блок 130 связи, блок 110 приема электрической энергии, выпрямитель 140, реле 146, активную нагрузку 144, участок 190 измерения напряжения принятой энергии (датчик напряжения), и зарядное устройство (преобразователь 142 постоянного тока) для зарядки устройства накопления электричества (не изображено).
Блок 240 связи и блок 130 связи беспроводным образом связываются друг с другом, чтобы обмениваться информацией, используемой для совмещения блока 110 приема электрической энергии и блока 220 передачи электрической энергии. Временно подключая активную нагрузку 144 к выводу блока 110 приема электрической энергии через реле 146, участок 190 измерения напряжения принятой энергии включается, чтобы получать информацию о напряжении, которая используется для определения того, удовлетворяются ли условия для приема электрической энергии. Запрос передачи электрической энергии с низким значением, чтобы получить информацию о напряжении, передается от транспортного средства 100 к устройству 200 подачи энергии через блоки 130 и 240 связи.
Фиг. 6 изображает схему конфигурации, показывающую детали транспортного средства 100, показанного на фиг. 1 и 5. Обращаясь к фиг. 6, транспортное средство 100 включает в себя устройство 150 накопления электричества, главное реле SMR1 системы, повышающий преобразователь 162, инверторы 164 и 166, мотор-генераторы 172 и 174, двигатель 176, механизм 177 распределения энергии и ведущее колесо 178.
Транспортное средство 100 дополнительно включает в себя вторичную саморезонирующую катушку 112, вторичную катушку 114, выпрямитель 140, преобразователь 142 постоянного тока, главное реле SMR2 системы и датчик 190 напряжения.
Транспортное средство 100 дополнительно включает в себя контроллер 180, камеру 120, блок 130 связи и кнопку 122 подачи энергии.
Транспортное средство 100 оборудовано двигателем 176 и мотор-генератором 174 в качестве источника движущей силы. Двигатель 176 и мотор-генераторы 172 и 174 подключаются к механизму 177 распределения энергии. Транспортное средство 100 приводится в движение движущей силой, сгенерированной, по меньшей мере, одним из двигателя 176 и мотор-генератора 174. Движущая энергия, сгенерированная двигателем 176, распределяется на два пути механизмом 177 распределения энергии. В частности, одним путем является путь передачи энергии ведущему колесу 178, а другим путем является путь передачи энергии мотор-генератору 172.
Мотор-генератор 172- это вращающаяся электрическая машина переменного тока (AC), и ее примеры включают в себя трехфазный синхронный электродвигатель переменного тока, в котором постоянные магниты вставлены в ротор. Мотор-генератор 172 генерирует электрическую энергию с помощью кинетической энергии, подаваемой от двигателя 176, которая распределяется механизмом 177 распределения энергии. Когда состояние заряда (SOC) устройства 150 накопления электричества падает ниже предварительно определенного значения, двигатель 176 запускается, и мотор-генератор 172 генерирует электрическую энергию, таким образом, заряжая устройство 150 накопления электричества.
Мотор-генератор 174 также является вращающейся электрической машиной переменного тока, и, как и в случае мотор-генератора 172, ее примеры включают в себя трехфазный синхронный электродвигатель переменного тока, в котором постоянные магниты вставлены в ротор. Мотор-генератор 174 генерирует движущую силу с помощью, по меньшей мере, одной из электрической энергии, накопленной в устройстве 150 накопления электричества, и электрической энергии, сгенерированной мотор-генератором 172. Движущая сила, сгенерированная мотор-генератором 174, передается ведущему колесу 178.
Когда транспортное средство тормозит, или его ускорение вниз по склону уменьшается, механическая энергия, накопленная в транспортном средстве в виде кинетической энергии и потенциальной энергии, используется, чтобы вращать мотор-генератор 174 через ведущее колесо 178, и мотор-генератор 174 функционирует как электрический генератор. Таким образом, мотор-генератор 174 функционируют как рекуперативный тормоз, который генерирует тормозное усилие, преобразуя механическую энергию в электрическую энергию. Электрическая энергия, сгенерированная мотор-генератором 174, накапливается в устройстве 150 накопления электричества.
В качестве механизма 177 распределения энергии может быть использована планетарная передача, включающая в себя солнечную шестерню, малые зубчатые колеса, водило и коронную шестерню. Малые зубчатые колеса зацепляют солнечную шестерню и коронную шестерню. Водило, вращаясь, поддерживает малые зубчатые колеса и соединяется с коленчатым валом двигателя 176. Солнечная шестерня соединяется с вращающимся валом мотор-генератора 172. Коронная шестерня соединяется с вращающимся валом мотор-генератора 174 и ведущим колесом 178.
Устройство 150 накопления электричества является перезаряжаемым источником энергии постоянного тока (DC), и его примеры включают в себя аккумуляторные батареи, такие как литий-ионные аккумуляторы и никель-водородные аккумуляторы. Устройство 150 накопления электричества накапливает электрическую энергию, подаваемую от преобразователя 142 постоянного тока, и накапливает электрическую энергию, которая генерируется мотор-генераторами 172 и 174. Устройство 150 накопления электричества подает накопленную электрическую энергию повышающему преобразователю 162. Конденсатор большой емкости может быть использован в качестве устройства 150 накопления электричества. Устройство 150 накопления электричества не ограничивается, пока оно функционирует как буфер электрической энергии, который может временно накапливать электрическую энергию, подаваемую от устройства 200 подачи энергии (фиг. 1), и электрическую энергию, сгенерированную мотор-генераторами 172 и 174, и подавать накопленную электрическую энергию повышающему преобразователю 162.
Главное реле SMR1 системы размещается между устройством 150 накопления электричества и повышающим преобразователем 162. Когда сигнал SE1 от контроллера 180 активируется, главное реле SMR1 системы электрически подключает устройство 150 накопления электричества к повышающему преобразователю 162, а когда сигнал SE1 деактивируется, главное реле SMR1 системы отключает электрическую цепь между устройством 150 накопления электричества и повышающим преобразователем 162. Повышающий преобразователь 162 повышает напряжение положительной цепи PL2 до напряжения, равного или большего, чем напряжение, выводимое из устройства 150 накопления электричества, на основе сигнала PWC от контроллера 180. Примеры повышающего преобразователя 162 включают в себя схему модулятора постоянного тока.
Инверторы 164 и 166 предусматриваются для мотор-генераторов 172 и 174, соответственно. Инвертор 164 приводит в действие мотор-генератор 172 согласно сигналу PWI1 от контроллера 180, а инвертор 166 приводит в действие мотор-генератор 174 согласно сигналу PWI2 от контроллера 180. Примеры инверторов 164 и 166 включают в себя трехфазные мостовые схемы.
Оба конца вторичной саморезонирующей катушки 112 подключаются к конденсатору 111 с переключателем (реле 113), расположенным между ними, и когда переключатель (реле 113) приводится в состояние электропроводности, вторичная саморезонирующая катушка 112 резонирует с первичной саморезонирующей катушкой устройства 200 подачи энергии через электромагнитное поле. Электрическая энергия принимается от устройства 200 подачи энергии вследствие резонанса. Хотя на фиг. 6 показан пример, в котором предусмотрен конденсатор 111, регулировка в отношении первичной саморезонирующей катушки может быть выполнена так, что резонанс возникает вследствие паразитной емкости катушки вместо конденсатора.
Число витков вторичной саморезонирующей катушки 112, соответственно, устанавливается на основе расстояния между вторичной саморезонирующей катушкой 112 и первичной саморезонирующей катушкой устройства 200 подачи энергии, резонансной частоты первичной саморезонирующей катушки и вторичной саморезонирующей катушки 112 и т.д., так что коэффициент Q добротности (Q>100, например), который указывает интенсивность резонанса первичной саморезонирующей катушки и вторичной саморезонирующей катушки 112, каппа, который указывает степень связи между ними, и т.д., становится большим.
Вторичная катушка 114 располагается соосно с вторичной саморезонирующей катушкой 112 и может быть магнитным образом связана с вторичной саморезонирующей катушкой 112 через электромагнитную индукцию. Вторичная катушка 114 принимает, через электромагнитную индукцию, электрическую энергию, принятую вторичной саморезонирующей катушкой 112, чтобы выводить электрическую энергию в выпрямитель 140. Вторичная саморезонирующая катушка 112 и вторичная катушка 114 формируют блок 110 приема электрической энергии, показанный на фиг. 1.
Выпрямитель 140 выпрямляет энергию переменного тока, принятую посредством вторичной катушки 114. На основе сигнала PWD от контроллера 180 преобразователь 142 постоянного тока преобразует электрическую энергию, выпрямленную выпрямителем 140, до уровня напряжения устройства 150 накопления электричества и выводит электрическую энергию в устройство 150 накопления электричества.
Главное реле SMR2 системы размещается между преобразователем 142 постоянного тока и устройством 150 накопления электричества. Когда сигнал SE2 от контроллера 180 активируется, главное реле SMR2 системы электрически подключает устройство 150 накопления электричества к преобразователю 142 постоянного тока, а когда сигнал SE2 деактивируется, главное реле SMR2 системы отключает электрическую цепь между устройством 150 накопления электричества и преобразователем 142 постоянного тока. Датчик 190 напряжения детектирует напряжение VR между выпрямителем 140 и преобразователем 142 постоянного тока и выводит детектированное значение контроллеру 180.
Резистор 144 и реле 146, подключенные последовательно, размещаются между выпрямителем 140 и преобразователем 142 постоянного тока. Реле 146 управляется так, чтобы быть в состоянии проводимости, контроллером 180, когда позиция транспортного средства регулируется, чтобы выполнять бесконтактную подачу энергии транспортного средства 100.
Контроллер 180 генерирует сигналы PWC, PWI1 и PWI2 для приведения в действие повышающего преобразователя 162 и мотор-генераторов 172 и 174, соответственно, на основе величины нажатия акселератора, скорости транспортного средства и сигналов от других различных датчиков. Контроллер 180 выводит сгенерированные сигналы PWC, PWI1 и PWI2 повышающему преобразователю 162 и инверторам 164 и 166, соответственно. Когда транспортное средство движется, контроллер 180 активирует сигнал SE1, чтобы включить главное реле SMR1 системы, и деактивирует сигнал SE2, чтобы выключить главное реле SMR2 системы.
Когда электрическая энергия подается от устройства 200 подачи энергии (фиг. 1) к транспортному средству 100, контроллер 180 принимает изображение, захваченное камерой 120, от камеры 120. Кроме того, контроллер 180 принимает, от устройства 200 подачи энергии, информацию об электрической энергии (напряжении и токе), выводимой от устройства 200 подачи энергии, через блок 130 связи и принимает, от датчика 190 напряжения, детектированное значение напряжения VR, которое детектируется датчиком 190 напряжения. Контроллер 180 выполняет управление парковкой транспортного средства способом, который будет описан позже, так что транспортное средство направляется к блоку 220 передачи электрической энергии (фиг. 1) устройства 200 подачи энергии на основе этих данных.
Когда управление парковкой для направления к блоку 220 передачи электрической энергии завершается, контролер 180 отправляет, устройству 200 подачи энергии, инструкцию подачи электрической энергии через блок 130 связи и активирует сигнал SE2, чтобы включить главное реле SMR2 системы. Контроллер 180 затем генерирует сигнал PWD для приведения в действие преобразователя 142 постоянного тока и выводит сгенерированный сигнал PWD преобразователю 142 постоянного тока.
Фиг. 7 изображает принципиальную схему для пояснения блока 110 приема электрической энергии на стороне транспортного средства и блока 220 передачи электрической энергии на стороне устройства подачи энергии более подробно.
Обращаясь к фиг. 7, высокочастотное устройство 210 подачи энергии представлено высокочастотным источником 213 энергии переменного тока и резистором 211, представляющим импеданс источника энергии.
Блок 220 передачи электрической энергии включает в себя первичную катушку 232, подключенную к высокочастотному устройству 210 подачи энергии, первичную саморезонирующую катушку 234, которая магнитным образом соединяется с первичной катушкой 232 посредством электромагнитной индукции, и конденсатор 242, подключенный между концами первичной саморезонирующей катушки 234.
Блок 110 приема электрической энергии включает в себя вторичную саморезонирующую катушку 112, которая резонирует с первичной саморезонирующей катушкой 234 через электромагнитное поле, и конденсатор 111 и реле 113, которые подключены последовательно между концами вторичной саморезонирующей катушки 112. Реле 113 управляется, чтобы быть в состоянии электропроводности, когда принимается электрическая энергия.
Блок 110 приема электрической энергии дополнительно включает в себя вторичную катушку 114, которая магнитным образом соединена с вторичной саморезонирующей катушкой 112. Энергия переменного тока, принятая посредством вторичной катушки 114, выпрямляется посредством выпрямителя 140. Конденсатор C1 подключается к выводу выпрямителя 140, а реле 146 и резистор 144, которые используются, когда регулируется относительная позиция между транспортным средством и оборудованием подачи энергии, подключаются между контактами конденсатора C1. Зарядное устройство (преобразователь 142 постоянного тока) дополнительно подключается к выходной стороне выпрямителя 140, чтобы преобразовывать напряжение в соответствующее зарядное напряжение, и преобразованное зарядное напряжение подается к аккумулятору (устройству 150 накопления электричества).
Резистор 144 устанавливается, чтобы иметь импеданс 50 Ом, например, и это значение регулируется, чтобы совпадать с импедансом, представленным резистором 211 высокочастотного устройства 210 подачи энергии.
Когда позиция остановки транспортного средства регулируется, чтобы выполнять бесконтактную подачу энергии транспортного средства, датчик 190 напряжения детектирует напряжение на резисторе 144 и выводит детектированное значение VR контроллеру 180.
С другой стороны, когда регулировка положения транспортного средства завершена, и транспортное средство заряжается от внешнего источника энергии посредством бесконтактной подачи энергии, датчик 190 напряжения детектирует, в качестве детектированного значения VR, входное напряжение на преобразователе 142 постоянного тока.
Фиг. 8 изображает функциональную блок-схему контроллера 180, показанного на фиг. 6. Обращаясь к фиг. 8, контроллер 180 включает в себя электронный блок 410 управления (ECU) интеллектуального содействия при парковке (IPA), электроусилитель 420 руля (EPS), ECU 430 мотор-генератора (MG), электронно-управляемый тормоз (ECB) 440, электрический стояночный тормоз (EPB) 450, резонансный ECU 460 и ECU 470 гибридного транспортного средства (HV).
IPA-ECU 410 выполняет направляющее управление, чтобы направлять транспортное средство к блоку 220 передачи электрической энергии (фиг. 1) устройства 200 подачи энергии на основе информации изображения, принятой от камеры 120, когда режим работы транспортного средства является режимом зарядки (первое направляющее управление).
В частности, IPA-ECU 410 распознает блок 220 передачи электрической энергии на основе информации изображения, принятой от камеры 120. Блок 220 передачи электрической энергии снабжен множеством светящихся участков 230, которые показывают позицию и ориентацию блока 220 передачи электрической энергии. IPA-ECU 410 распознает позиционное соотношение между транспортным средством и блоком 220 передачи электрической энергии (грубо оцененное расстояние и ориентация) на основе изображения множества светящихся участков 230, захваченного камерой 120. На основе результата распознавания IPA-ECU 410 выводит инструкцию в EPS 420 с тем, чтобы направлять транспортное средство к блоку 220 передачи электрической энергии в правильном направлении.
IPA-ECU 410 предоставляет, в HV-ECU 470, уведомление об окончании направляющего управления (первого направляющего управления) на основе информации изображения, принятой от камеры 120, когда транспортное средство приближается к блоку 220 передачи электрической энергии, чтобы вызвать позиционирование блока 220 передачи электрической энергии под кузовом транспортного средства, и становится невозможным для камеры 120 захватывать блок 220 передачи электрической энергии. EPS 420 выполняет автоматическое управление рулем согласно инструкциям, отправленным из IPA-ECU 410 во время первого направляющего управления.
MG-ECU 430 управляет мотор-генераторами 172 и 174 и повышающим преобразователем 162, согласно инструкциям, отправленным из HV-ECU 470. В частности, MG-ECU 430 генерирует сигналы для приведения в действие мотор-генераторов 172 и 174 и повышающего преобразователя 162 и выводит сигналы к инверторам 164 и 166 и повышающему преобразователю 162.
ECB 440 управляет торможением транспортного средства, согласно инструкциям, отправленным из HV-ECU 470. В частности, ECB 440 управляет гидравлическим тормозом согласно инструкциям, отправленным из HV-ECU 470, и выполняет совместное управление гидравлическим тормозом и рекуперативным тормозом с помощью мотор-генератора 174. EPB 450 управляет электрическим стояночным тормозом, согласно инструкциям, отправленным из HV-ECU 470.
Резонансный ECU 460 принимает, от устройства 200 подачи энергии, информацию об электрической энергии, выводимой из устройства 200 подачи энергии (фиг. 1), через блок 130 связи. Резонансный ECU 460 принимает, от датчика 190 напряжения (фиг. 6 и 7) детектированное значение напряжения VR, указывающее напряжение электрической энергии, принятой транспортным средством. Резонансный ECU 460 детектирует расстояние между блоком 220 передачи электрической энергии устройства 200 подачи энергии и блоком 110 приема электрической энергии транспортного средства, например, сравнивая напряжение VR и напряжение, переданное от устройства 200 подачи энергии. Резонансный ECU 460 затем выполняет второй процесс направления транспортного средства для направления транспортного средства 100 на основе детектированного расстояния.
HV-ECU 470 приводит в движение транспортное средство 100, управляя MG-ECU 430 для управления транспортным средством на основе результата одного из первого процесса направления транспортного средства и второго процесса направления транспортного средства. HV-ECU 470 выполняет процесс остановки транспортного средства 100, когда электрическая энергия, принятая посредством блока 110 приема электрической энергии от блока 220 передачи электрической энергии, не удовлетворяет предварительно определенному условию приема электрической энергии, на основе чего определяется, возможно ли начинать прием электрической энергии, даже после того как транспортное средство было перемещено посредством MG-ECU 430 за пределы предварительно определенного расстояния, после того как IPA-ECU 410 становится неспособным детектировать позицию блока 220 передачи электрической энергии на основе изображения. Это процесс может быть процессом автоматического применения тормоза или может быть процессом инструктирования водителя нажать на педаль тормоза.
HV-ECU 470 останавливает прием электрической энергии через блок 110 приема электрической энергии и прекращает направление, выполняемое резонансным ECU 460, когда электрическая энергия, принятая блоком 110 приема электрической энергии от блока 220 передачи электрической энергии, не удовлетворяет предварительно определенному условию приема электрической энергии, на основе чего определяется, возможно ли начинать прием электрической энергии, даже после того как транспортное средство было перемещено посредством MG-ECU 430 за пределы предварительно определенного расстояния, после того как IPA-ECU 410 становится неспособным детектировать позицию блока 220 передачи электрической энергии на основе изображения.
HV-ECU 470 заканчивает направление, выполняемое резонансным ECU 460, и начинает подготовку к зарядке устройства 150 накопления электричества в транспортном средстве через блок 220 передачи электрической энергии, когда электрическая энергия, принятая блоком 110 приема электрической энергии от блока 220 передачи электрической энергии, удовлетворяет условию приема электрической энергии, прежде чем транспортное средство переместилось на предварительно определенное расстояние, после того как IPA-ECU 410 становится неспособным детектировать позицию блока 220 передачи электрической энергии на основе изображения.
Более предпочтительно то, что после автоматической остановки транспортного средства 100 и прекращения направления, выполняемого резонансным ECU 460, HV-ECU 470 повторно начинает передачу или прием электрической энергии через блок 110 приема электрической энергии в ответ на инструкцию (операцию установки рычага переключения передач в диапазон парковки) от водителя, после того как водитель изменяет позицию транспортного средства. Затем, HV-ECU 470 начинает зарядку устройства 150 накопления электричества в транспортном средстве через блок 220 передачи электрической энергии, когда электрическая энергия, принятая блоком 110 приема электрической энергии от блока 220 передачи электрической энергии, удовлетворяет условию приема электрической энергии, а с другой стороны, HV-ECU 470 предупреждает водителя, когда электрическая энергия, принятая блоком 110 приема электрической энергии от блока 220 передачи электрической энергии, не удовлетворяет условию приема электрической энергии.
Фиг. 9 изображает блок-схему алгоритма (первая половина) для пояснения управления, выполняемого на этапе регулировки позиции транспортного средства, когда выполняется бесконтактная подача энергии.
Фиг. 10A и 10B изображают блок-схему алгоритма (вторая половина) для пояснения управления, выполняемого на этапе регулировки позиции транспортного средства, когда выполняется бесконтактная подача энергии.
В левой части каждой из фиг. 9, 10A и 10B показано управление, выполняемое на стороне транспортного средства, а в правой их части показано управление, выполняемое на стороне устройства подачи энергии.
Обращаясь к фиг. 1 и 9, процесс остановки транспортного средства выполняется на этапе S1 на стороне транспортного средства, и, впоследствии, на этапе S2, детектируется, приведена ли кнопка 122 подачи энергии во включенное состояние. Когда кнопка подачи энергии не приведена во включенное состояние, контроллер 180 ожидает до тех пор, пока кнопка подачи энергии не будет приведена во включенное состояние. Когда детектируется, что кнопка 122 подачи энергии приведена во включенное состояние на этапе S2, процесс переходит к этапу S3. На этапе S3 контроллер 180 начинает связываться с устройством 200 подачи энергии с помощью блока 130 связи.
На стороне устройства подачи энергии, после того как процесс начинается на этапе S51, процесс ожидает на этапе S52, пока не появится запрос связи со стороны транспортного средства, и когда запрос начала связи существует, связь начинается на этапе S53.
На стороне транспортного средства управление, чтобы приводить реле 113 во включенное состояние, выполняется на этапе S4 после процесса начала связи на этапе S3. Затем, на этапе S5, начинается управление парковкой. На первом этапе управления парковкой используется система интеллектуального содействия при парковке (IPA), использующая камеру.
Когда транспортное средство приближается к позиции подачи энергии до определенной степени, запрос детектирования расстояния устанавливается в активное состояние в контроллере 180 (ДА на этапе S6).
Обращаясь к фиг. 1 и 10A и 10B, на стороне устройства подачи энергии, следом за этапом S53, процесс ожидает, пока запрос передачи тестового сигнала не будет установлен в активное состояние на этапе S54.
С другой стороны, на стороне транспортного средства, процесс переходит от этапа S6 к этапу S7, и контроллер 180 приводит реле 146 во включенное состояние. На этапе S8 уведомление о том, что запрос передачи тестового сигнала приведен в активное состояние, передается в сторону устройства подачи энергии. Устройство подачи энергии затем детектирует, что запрос передачи тестового сигнала приведен в активное состояние на этапе S54, и продвигает процесс к этапу S55, чтобы отправлять тестовый сигнал транспортному средству. Хотя тестовый сигнал может иметь ту же электрическую энергию, что и отправленный, после того как начинается зарядка, предпочтительно, чтобы тестовый сигнал был установлен как слабый сигнал (электрическая энергия с низким значением), который слабее, чем сигнал, отправленный, когда выполняется основная операция подачи энергии.
Прибытие транспортного средства в область, в которой электрическая энергия может подаваться, детектируется на основе того факта, что напряжение на резисторе 144, вызванное тестовым сигналом, достигает определенного напряжения.
В то время как напряжение на первичной стороне (напряжение, выводимое из устройства 200 подачи энергии) является постоянным, напряжение на вторичной стороне (напряжение, принятое транспортным средством 100) изменяется в зависимости от расстояния L между блоком 220 передачи электрической энергии устройства 200 подачи энергии и блоком 110 приема электрической энергии транспортного средства 100. Таким образом, возможно, подготовить карту, или т.п., заранее измеряя соотношения между напряжением на первичной стороне и напряжением на вторичной стороне, например, чтобы детектировать расстояние между блоком 220 передачи электрической энергии и блоком 110 приема электрической энергии на основе детектированного значения напряжения VR, указывающего напряжение на вторичной стороне.
Отметим, что ток на первичной стороне (электрический ток, выводимый из устройства 200 подачи энергии) также изменяется в зависимости от расстояния L между блоком 220 передачи электрической энергии и блоком 110 приема электрической энергии, и, следовательно, расстояние между блоком 220 передачи электрической энергии и блоком 110 приема электрической энергии может быть детектировано на основе детектированного значения электрического тока, выводимого из устройства 200 подачи энергии, с помощью этого соотношения.
Когда резонансный ECU 460 детектирует расстояние между блоком 220 передачи электрической энергии и блоком 110 приема электрической энергии, резонансный ECU 460 выводит информацию о расстоянии в HV-ECU 470. Когда резонансный ECU 460 принимает инструкцию начала зарядки от HV-ECU 470, резонансный ECU 460 включает главное реле SMR2 системы, активируя сигнал SE2, который выводится главному реле SMR2 системы. Резонансный ECU 460 затем генерирует сигнал для приведения в действие преобразователя 142 постоянного тока и выводит сгенерированный сигнал преобразователю 142 постоянного тока.
HV-ECU 470 выводит управляющие инструкции в MG-ECU 430 и ECB 440 согласно состоянию нажатия педали акселератора и/или педали тормоза, состоянию движения транспортного средства и т.д., когда режимом работы транспортного средства является режим движения. Когда водитель предоставляет инструкцию активации стояночного тормоза, например, управляя переключателем стояночного тормоза, HV-ECU 470 выводит инструкцию, чтобы приводить в действие EPB 450.
С другой стороны, когда режимом работы транспортного средства является режим зарядки, HV-ECU 470 устанавливает связь с устройством 200 подачи энергии (фиг. 1) через блок 130 связи и выводит инструкцию активации, чтобы активировать устройство 200 подачи энергии, устройству 200 подачи энергии через блок 130 связи. Когда устройство 200 подачи энергии активируется, HV-ECU 470 выводит инструкцию, чтобы включать светящиеся участки 230, предусмотренные в блоке 220 передачи электрической энергии устройства 200 подачи энергии, устройству 200 подачи энергии через блок 130 связи. Когда светящиеся участки 230 включаются, HV-ECU 470 выводит, устройству 200 подачи энергии через блок 130 связи, сигнал указания направляющего управления, указывающий, что направляющее управление, чтобы направлять транспортное средство 100 к блоку 220 передачи электрической энергии выполняется, и, кроме того, HV-ECU 470 выводит, в IPA-ECU 410, инструкцию, чтобы выполнять направляющее управление (первое направляющее управление) с помощью информации изображения, предоставленной из камеры 120.
Кроме того, когда HV-ECU 470 принимает уведомление об окончании первого направляющего управления от IPA-ECU 410, HV-ECU 470 выполняет направляющее управление (второе направляющее управление) с помощью информации о расстоянии между блоком 220 передачи электрической энергии и блоком 110 приема электрической энергии. В частности, HV-ECU 470 принимает информацию о расстоянии между блоком 220 передачи электрической энергии устройства 200 подачи энергии и блоком 110 приема электрической энергии транспортного средства от резонансного ECU 460, и на основе информации о расстоянии HV-ECU 470 выводит инструкции в MG-ECU 430 и ECB 440, которые управляют движением и торможением, соответственно, транспортного средства так, что расстояние между блоком 220 передачи электрической энергии и блоком 110 приема электрической энергии минимизируется.
На этапах S10 и S11 на фиг. 10A определяется, заканчивать ли операцию парковки. В частности, на этапе S10, определяется, находится ли расстояние перемещения транспортного средства в ожидаемом диапазоне. Расстояние перемещения транспортного средства в данном случае вычисляется из произведения скорости транспортного средства на прошедшее время.
Когда определяется на этапе S10, что расстояние перемещения транспортного средства находится за пределами ожидаемого диапазона, процесс переходит к этапу S20 (режим 2 работы). Ожидаемый диапазон может быть равен 1,5 м, например, после того как блок 220 передачи электрической энергии попадает в слепую зону камеры 120, как описано с помощью фиг. 4. Поскольку точность датчика скорости транспортного средства не высока при низких скоростях транспортного средства, необходимо выбирать пороговое значение, которое определяет ожидаемый диапазон, принимая во внимание ошибку детектирования датчика скорости транспортного средства.
Когда на этапе S10 определяется, что расстояние перемещения транспортного средства не за пределами ожидаемого диапазона, процесс переходит к этапу S11, и определяется, равно ли напряжение, детектированное датчиком 190 напряжения, или выше, чем пороговое значение Vt1.
Фиг. 11 изображает диаграмму, показывающую соотношение между расстоянием перемещения транспортного средства и напряжением принятой энергии. Как показано на фиг. 11, напряжение V принятой энергии увеличивается, когда расстояние перемещения транспортного средства приближается к точке, в которой позиционное отклонение равно нулю. Когда позиция, в которой позиционное отклонение равно нулю, пройдена, напряжение V принятой энергии начинает уменьшаться. Пороговое значение Vt1 является пороговым значением определения, на основе которого инструкция остановки выводится транспортному средству, и пороговое значение Vt1 заранее определяется посредством измерения соотношения между расстоянием между блоком 220 передачи электрической энергии и блоком 110 приема электрической энергии и напряжением.
С другой стороны, пороговое значение Vt2, показанное на фиг. 11, является пороговым значением, определенным на основе допустимой потери напряженности электромагнитного поля, которая является напряженностью электромагнитного поля, которая теряется, когда выполняется передача и прием энергии с максимальной выходной мощностью, и пороговое значение Vt2 меньше, чем пороговое значение Vt1.
Обращаясь опять к фиг. 10A, когда напряжение принятой энергии не равно или выше, чем пороговое значение Vt1 на этапе S11, процесс возвращается к этапу S10. Контроллер 180 циклически определяет, располагается ли принимающая электрическую энергию катушка (вторичная саморезонирующая катушка 112), относительно передающей электрическую энергию катушки (первичной саморезонирующей катушки 234), так, чтобы иметь возможность принимать электрическую энергию от передающей электрическую энергию катушки, и во время этого контроллер 180 определяет направление движения транспортного средства, так что принимающая электрическую энергию катушка позиционируется, относительно передающей электрическую энергию катушки, так, чтобы иметь возможность принимать электрическую энергию от передающей электрическую энергию катушки.
Вычисление расстояния перемещения транспортного средства, выполняемое на этапе S10, будет сейчас описано подробно. Фиг. 12 изображает блок-схему алгоритма для пояснения детектирования расстояния перемещения транспортного средства, выполненного на этапе S10 на фиг. 10A.
Обращаясь к фиг. 12, когда направление с помощью напряжения VR катушки начинается на этапе S101, настройка выполняется таким образом, что увеличение расстояния вычисляется с помощью произведения скорости транспортного средства и времени цикла (8,192 мс, например) независимо от детектирования позиции с помощью напряжения VR катушки, как показано этапом S102. Скорость транспортного средства детектируется датчиком скорости транспортного средства.
Расстояния суммируются на этапе S103, и на этапе S104 определяется, равно ли суммарное значение расстояний или больше, чем пороговое значение (150 см, например). Когда суммарное значение еще не достигло порогового значения на этапе S104, процесс возвращается к этапу S103, и суммирование расстояний продолжается. В этом случае, операция парковки с использованием операции содействия при парковке продолжается.
Когда суммарное значение расстояний равно или больше, чем 150 см, на этапе S104, настройка скорости транспортного средства устанавливается в 0 км/ч для того, чтобы предотвращать излишнее перемещение, как описано со ссылкой на фиг. 4.
Фиг. 13 изображает временную диаграмму сигналов операции, показывающую пример операции, в которой настройка скорости транспортного средства устанавливается в ноль согласно блок-схеме алгоритма, показанной на фиг. 12.
Обращаясь к фиг. 13, в момент времени t1 флаг IPA устанавливается во включенное состояние, и настройка скорости транспортного средства устанавливается в 1,8 км/ч. Флаг IPA приводится во включенное состояние, когда водитель выбирает режим интеллектуального содействия при парковке. От момента времени t1 до момента t2 IPA-режим (режим содействия при парковке) является режимом направления, в котором направление выполняется с помощью камеры 120. Когда блок 220 передачи электрической энергии попадает в слепую зону камеры 120 в момент времени t2, EPA-режим изменяется на режим направления, в котором направление выполняется с помощью напряжения катушки, в момент времени t2. Когда расстояние достигает порогового значения, т.е., 1,5 м, на этапах S103 и S104 на фиг. 12, флаг F изменяется от выключенного состояния во включенное состояние в момент времени t3, так что настройка скорости транспортного средства устанавливается в 0 км/ч, и транспортное средство останавливается.
Обращаясь опять к фиг. 10A и 10B, когда напряжение принятой энергии равно или выше, чем пороговое значение Vt1 на этапе S11, контроллер 180 выводит инструкцию остановки транспортного средства на этапе S12. Инструкция остановки транспортного средства может быть инструкцией, предлагающей водителю остановить транспортное средство, нажав на педаль тормоза, или может быть инструкцией выполнения процесса автоматического применения тормоза. Однако, существует возможность того, что транспортное средство движется, после того как инструкция остановки транспортного средства выдана, как показано стрелкой D1 на фиг. 11, и, следовательно, когда, после того как транспортное средство остановлено, напряжение принятой энергии равно или выше, чем пороговое значение Vt2 на этапе S13, расстояние перемещения транспортного средства находится в ожидаемом диапазоне, прошедшее время не превышает ограничения времени, и температура является подходящей температурой, чтобы выполнять зарядку, процесс переходит к этапу S14. Когда одно из условий не удовлетворяется на этапе S13, процесс переходит к этапу S20 (режим 2).
На этапе S14 определяется, приведено ли положение рычага переключения передач в P-диапазон. На этапе S14, когда положение рычага переключения передач не находится в P-диапазоне, процесс этапа S13 циклически выполняется до тех пор, пока положение рычага переключения передач не будет приведено в P-диапазон, и наблюдение за отклонением транспортного средства продолжается.
На этапе S14, когда положение рычага переключения передач приведено в P-диапазон, процесс переходит к этапу S15. В этом случае, определяется, что позиция, в которой транспортное средство остановлено, установлена, и что операция парковки завершена, и контроллер 180 транспортного средства устанавливает запрос передачи тестового сигнала в неактивное состояние. В частности, изменение положения рычага переключения передач в P-диапазон запускает остановку передачи электрической энергии с низким значением (тестового сигнала).
Когда устройство подачи энергии уведомляется о настройке посредством связи, детектируется на этапе S56, что запрос передачи тестового сигнала изменился в неактивное состояние, и передача тестового сигнала прекращается на этапе S57.
В устройстве подачи энергии, впоследствии, на этапе S58 детектируется, приведен ли запрос подачи энергии в активное состояние.
На стороне транспортного средства процесс переходит к этапу S16, после того как запрос передачи тестового сигнала устанавливается в неактивное состояние на этапе S15.
На этапе S16 реле 146 управляется, чтобы переключаться из включенного состояния в выключенное состояние. После этого, HV-ECU 470 выводит, в устройство 200 подачи энергии через блок 130 связи, инструкцию начала подачи электрической энергии из устройства 200 подачи энергии, и HV-ECU 470 выводит инструкцию начала зарядки резонансному ECU 460. На этапе S17, HV-ECU 470 уведомляет устройство подачи энергии о факте того, что запрос подачи энергии приведен в активное состояние, посредством связи.
На стороне устройства подачи энергии детектируется, что запрос подачи энергии приведен в активное состояние на этапе S58, и подача электрической с высоким значением начинается на этапе S59. Таким образом, на стороне транспортного средства, прием электрической энергии начинается на этапе S18.
Фиг. 14 изображает блок-схему алгоритма для пояснения процесса режима 2 работы, выполняемого на этапе S20 на фиг. 10A и 10B. Режим 2 работы - это режим, который выбирается, когда детектирование расстояния, которое должно выполняться с помощью катушки при электрической энергии с низким значением, не выполняется, и водитель повторяет операцию парковки.
Обращаясь к фиг. 14, когда процесс режима 2 работы начинается на этапе S20, запрашивается прекращение тестового сигнала (электрическая энергия с низким значением) на этапе S21. На этапе S22 водителю предоставляется, через указание на дисплее, мигание лампы и т.д., уведомление о возникновение отклонения, что становится невозможным принимать электрическую энергию, даже после того как ожидаемый диапазон пройден. В ответ на это, водитель проводит регулировку вручную положения транспортного средства.
На этапе S23 определяется, остановлено ли транспортное средство. Если не подтверждается, что транспортное средство остановлено, предоставление уведомления об отклонении продолжается на этапе S22. Когда подтверждается, что транспортное средство остановилось, на этапе S23, процесс переходит к этапу S24, и определяется, находится ли позиция рычага переключения передач в P-диапазоне.
До тех пор пока не определяется на этапе S24, что позиция рычага переключения передач была приведена в P-диапазон, процесс останавливается. Когда подтверждается на этапе S24, что позиция рычага переключения передач была приведена в P-диапазон, считается, что транспортное средство не движется, и, следовательно, запрашивается передача электрической энергии с низким значением в течение короткого периода времени (около 1 секунды) на этапе S25. На этапе S26 определяется, равно ли напряжение принятой энергии или выше, чем пороговое значение Vt2. На этапе S26 определяется, становится ли возможным прием электрической энергии в результате регулировки вручную положения транспортного средства водителем. Следует отметить, что пороговое значение Vt2 устанавливается в значение, меньшее, чем пороговое значение Vt1, как описано выше со ссылкой на фиг. 11.
Когда напряжение принятой энергии равно или выше, чем пороговое значение Vt2 на этапе S26, процесс переходит к этапу S28, и начинается передача электрической энергии с высоким значением. С другой стороны, когда напряжение принятой энергии не равно или выше, чем пороговое значение Vt2, на этапе S26, процесс переходит к этапу S27, и водитель уведомляется о возникновении отклонения, что зарядка не может быть начата.
Как описано выше, в этом варианте осуществления, после того как блок 220 передачи электрической энергии попадает в слепую зону камеры 120, передача и прием электрической энергии с низким значением выполняется между блоком 220 передачи электрической энергии и блоком 110 приема электрической энергии, и на основе передачи и приема электрической энергии с низким значением выполняется операция содействия при парковке. Это делает возможным точное определение позиции парковки, даже после того как блок 220 передачи электрической энергии попадает под транспортное средство.
Кроме того, управление выполняется, чтобы останавливать транспортное средство 100, когда электрическая энергия не принимается хорошо блоком 110 приема электрической энергии, даже после того как транспортное средство 100 переместилось так, что блок 220 передачи электрической энергии попадает за пределы предполагаемого диапазона. Таким образом, возможно, предотвращать возникновение ситуации, в которой транспортное средство 100 чрезмерно переместилось, и, как результат, переднее колесо транспортного средства наезжает на блок 220 передачи электрической энергии, или транспортное средство 100 соприкасается с другим препятствием, например.
Кроме того, даже когда автоматическая парковка успешно не выполнена, электрическая энергия принимается после подтверждения того, возможно ли принимать электрическую энергию, когда водитель вручную установил позицию, в которой транспортное средство останавливается, так что возможность для зарядки увеличивается без увеличения необходимости выполнять неудобные операции.
В заключение, вариант осуществления резюмируется снова со ссылкой на чертежи. Обращаясь к фиг. 1, 6 и 8, система содействия при парковке транспортного средства, показанная в этом варианте осуществления, включает в себя: камеру 120, которая захватывает изображение области рядом с транспортным средством 100; первую направляющую секцию транспортного средства (IPA-ECU 410), которая распознает позицию блока 220 передачи электрической энергии, внешнего по отношению к транспортному средству, на основе изображения, полученного через камеру 120, чтобы направлять транспортное средство 100 к блоку 220 передачи электрической энергии; блок 110 приема электрической энергии, который принимает электрическую энергию от блока 220 передачи электрической энергии бесконтактным образом; вторую направляющую секцию транспортного средства (резонансный ECU 460), которая детектирует расстояние между блоком 220 передачи электрической энергии и транспортным средством 100 на основе электрической энергии, принятой блоком 110 приема электрической энергии, и направляет транспортное средство 100 на основе детектированного расстояния; и секцию управления (HV-ECU 470), которая вызывает перемещение транспортного средства 100, управляя секцией приведения в движение транспортного средства (MG-ECU 430), которая приводит в движение транспортное средство, на основе выходных сигналов от первой и второй направляющих секций транспортного средства. Секция управления (HV-ECU 470) выполняет процесс остановки транспортного средства 100, когда электрическая энергия, принятая блоком 110 приема электрической энергии от блока 220 передачи электрической энергии, не удовлетворяет первому условию, заключающемуся в том, что электрическая энергия равна или выше, чем первое пороговое значение, даже после того как секция управления (HV-ECU 470) вызывает перемещение транспортного средства под воздействием секции приведения в движение транспортного средства (MG-ECU 430) за пределы предварительно определенного расстояния, после того как первая направляющая секция транспортного средства (IPA-ECU 410) не может детектировать позицию блока 220 передачи электрической энергии на основе изображения. Предпочтительно, чтобы первое пороговое значение заранее определялось посредством измерения соотношения между расстоянием между блоком 220 передачи электрической энергии и блоком 110 приема электрической энергии и напряжением.
Предпочтительно, чтобы секция управления (HV-ECU 470) останавливала прием электрической энергии через блок 110 приема электрической энергии и прекращала направление, выполняемое второй направляющей секцией транспортного средства (резонансным ECU 460), когда электрическая энергия, принятая блоком 110 приема электрической энергии от блока 220 передачи электрической энергии, не удовлетворяет первому условию, даже после того как секция управления (HV-ECU 470) вызывает перемещение транспортного средства под воздействием секции приведения в движение транспортного средства (MG-ECU 430) за пределы предварительно определенного расстояния, после того как первая направляющая секция транспортного средства (IPA-ECU 410) не может детектировать позицию блока 220 передачи электрической энергии на основе изображения.
Более предпочтительно, чтобы секция управления (HV-ECU 470) прекращала направление, выполняемое второй направляющей секцией транспортного средства (резонансным ECU 460) и начинала подготовку к зарядке устройства 150 накопления электричества в транспортном средстве через блок 220 передачи электрической энергии, когда электрическая энергия, принятая блоком 110 приема электрической энергии от блока 220 передачи электрической энергии, удовлетворяет первому условию, прежде чем транспортное средство переместилось на предварительно определенное расстояние, после того как первая направляющая секция транспортного средства (IPA-ECU 410) не может детектировать позицию блока 220 передачи электрической энергии на основе изображения.
Предпочтительно, что, после того как секция управления (HV-ECU 470) автоматически останавливает транспортное средство 100 и прекращает направление, выполняемое второй направляющей секцией транспортного средства (резонансным ECU 460), секция управления (HV-ECU 470) повторно начинает передачу или прием электрической энергии через блок 110 приема электрической энергии в ответ на инструкцию от водителя, секция управления (HV-ECU 470) начинает зарядку устройства 150 накопления электричества в транспортном средстве через блок 220 передачи электрической энергии, когда электрическая энергия, принятая блоком 110 приема электрической энергии от блока 220 передачи электрической энергии, удовлетворяет второму условию, заключающемуся в том, что электрическая энергия равна или выше, чем второе пороговое значение, и, с другой стороны, секция управления (HV-ECU 470) предупреждает водителя, когда электрическая энергия, принятая блоком 110 приема электрической энергии от блока 220 передачи электрической энергии, не удовлетворяет второму условию. Предпочтительно, чтобы второе пороговое значение было меньшим, чем первое пороговое значение. В этом случае, как показано на фиг. 11, пороговое значение Vt1 и пороговое значение Vt2 устанавливаются так, чтобы удовлетворять соотношению пороговое значение Vt1 > пороговое значение Vt2. Более предпочтительно, чтобы второе пороговое значение определялось на основе допустимой потери напряженности электромагнитного поля, которая является напряженностью электромагнитного поля, которая теряется, когда передача и прием энергии выполняется при максимальной выходной мощности.
Более предпочтительно, что водитель предоставляет инструкцию, выполняя операцию для приведения секции приведения в движение транспортного средства (MG-ECU 430) в состояние парковки, такую как операция приведения рычага переключения передач в позицию парковки или операция нажатия кнопки парковки.
Предпочтительно, чтобы, как показано на фиг. 7, блок 110 приема электрической энергии включал в себя вторичную саморезонирующую катушку 112, которая является принимающей электрическую энергию катушкой, которая принимает электрическую энергию бесконтактным образом через резонанс электромагнитного поля от первичной саморезонирующей катушки 234, которая является передающей электрическую энергию катушкой блока 220 передачи электрической энергии.
Варианты осуществления, раскрытые в данном документе, являются просто примерами и не должны рассматриваться как ограничивающие. Объем изобретения не определяется вышеприведенным описанием, а формулой изобретения, и подразумевает включение в себя всех модификаций в объеме формулы изобретения и ее эквивалентах.
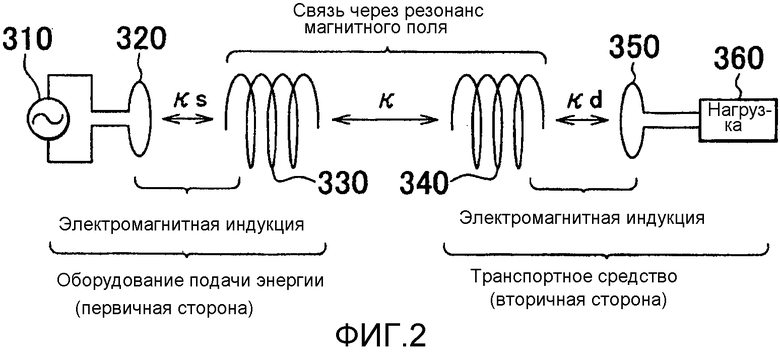
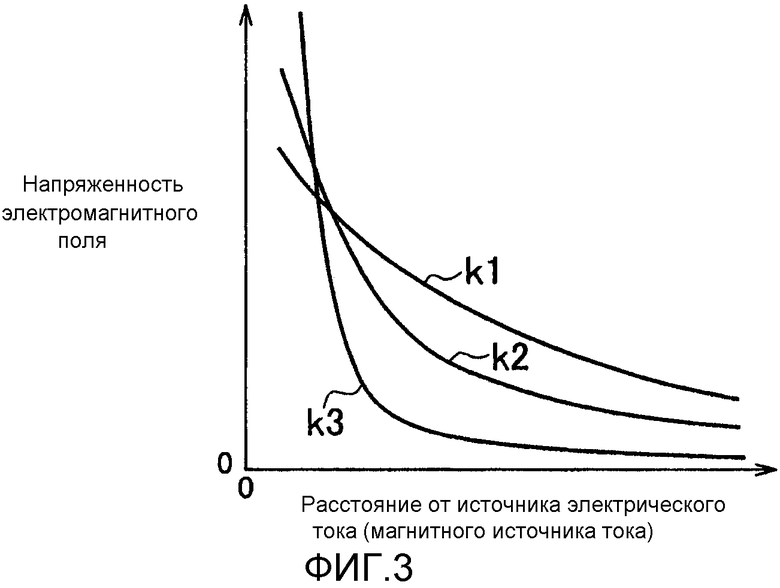
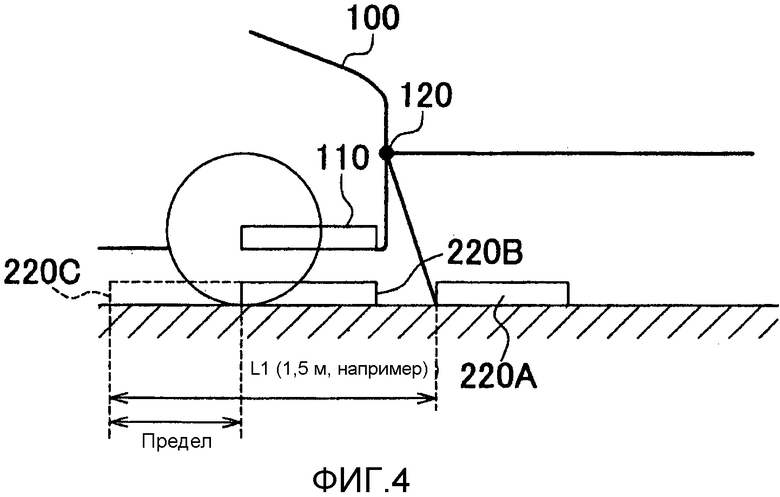
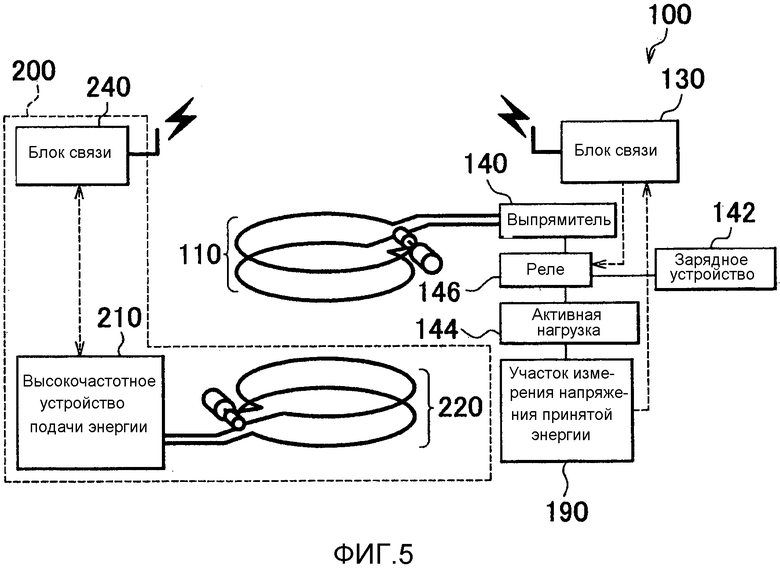
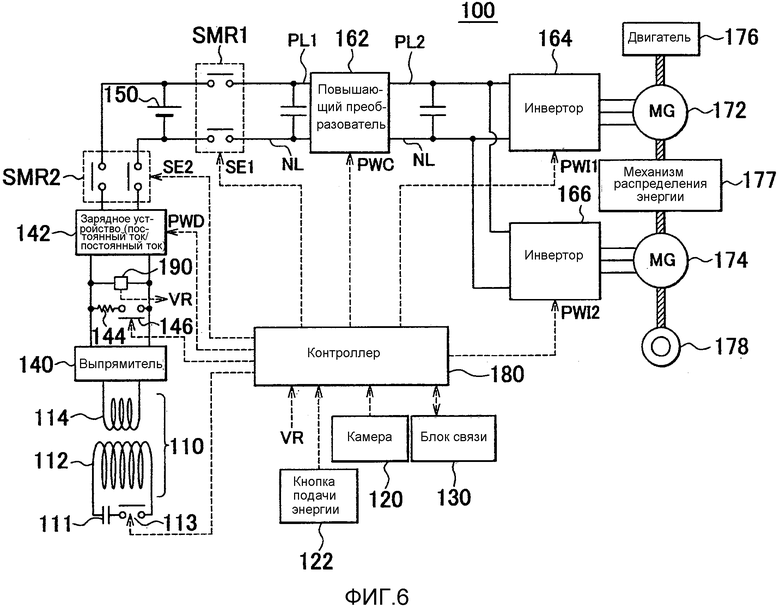
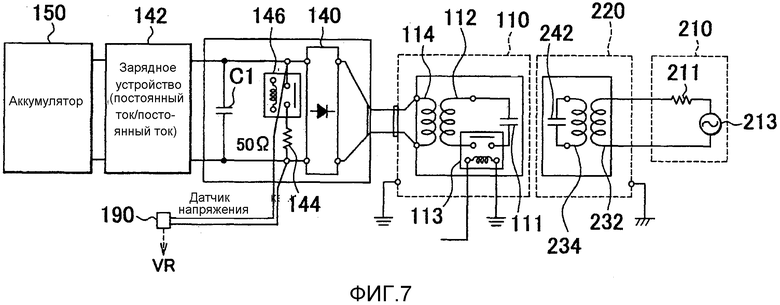
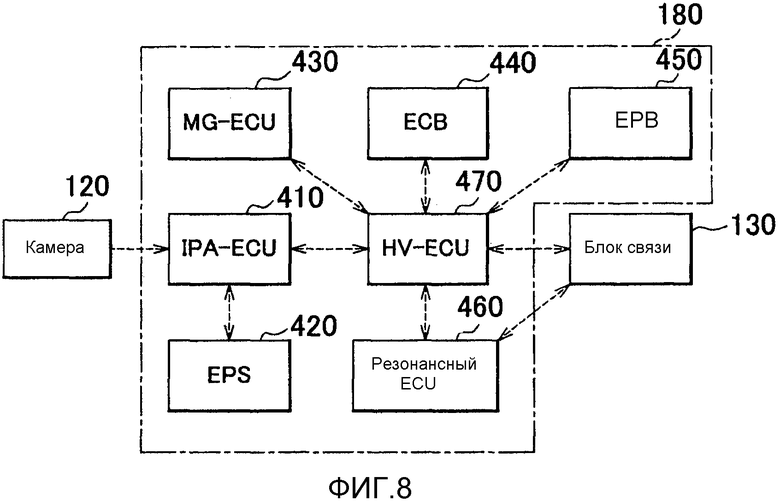
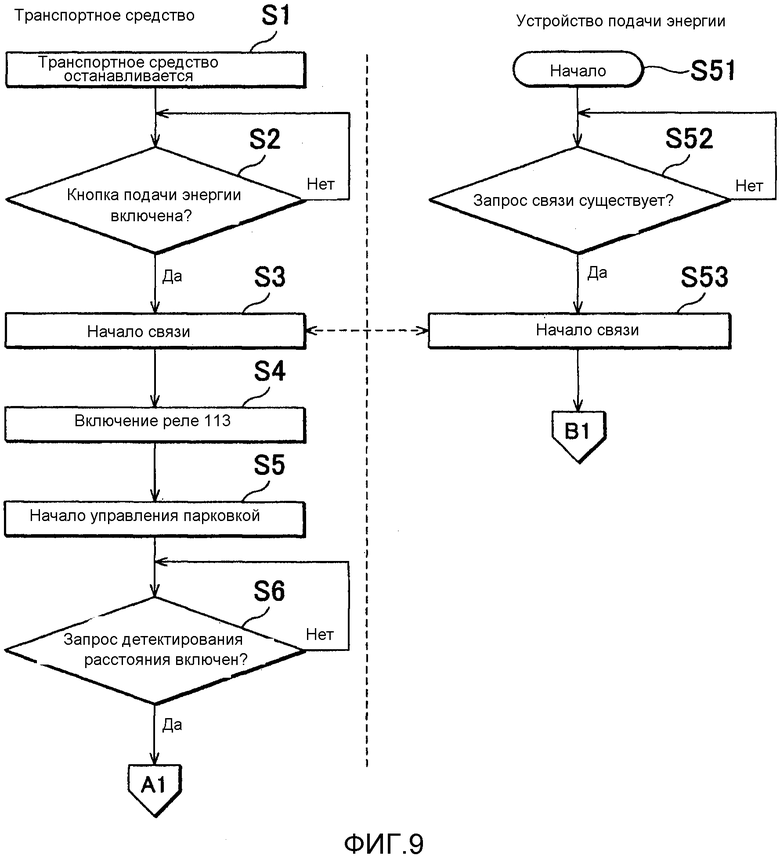
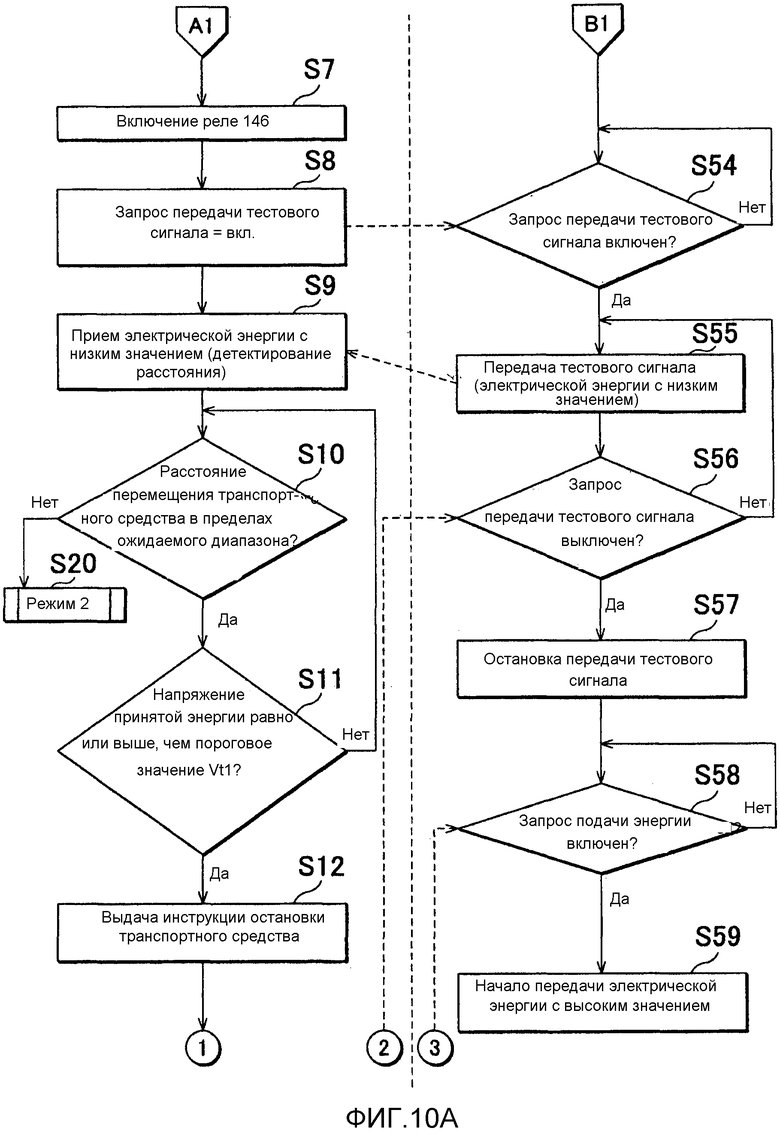
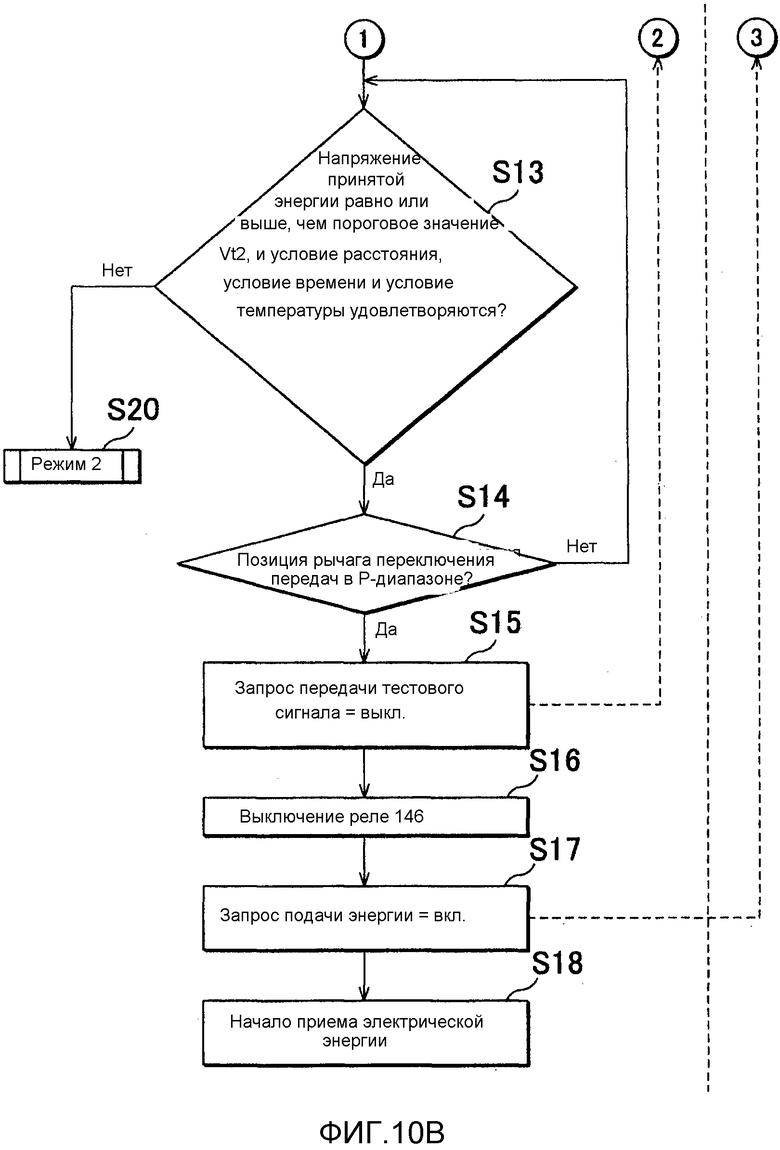
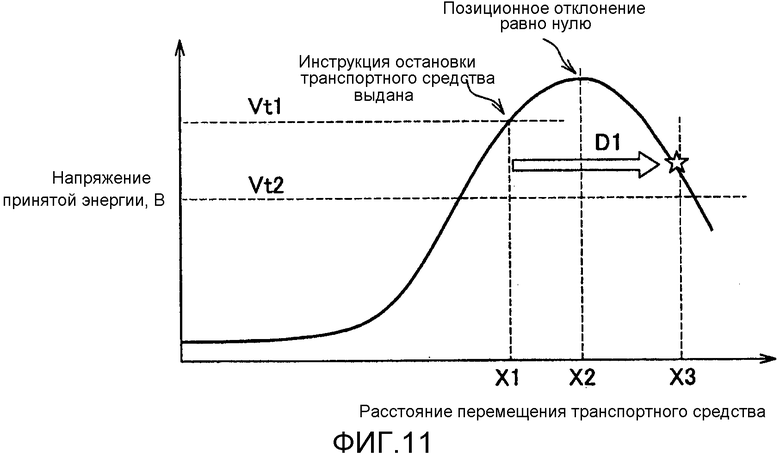
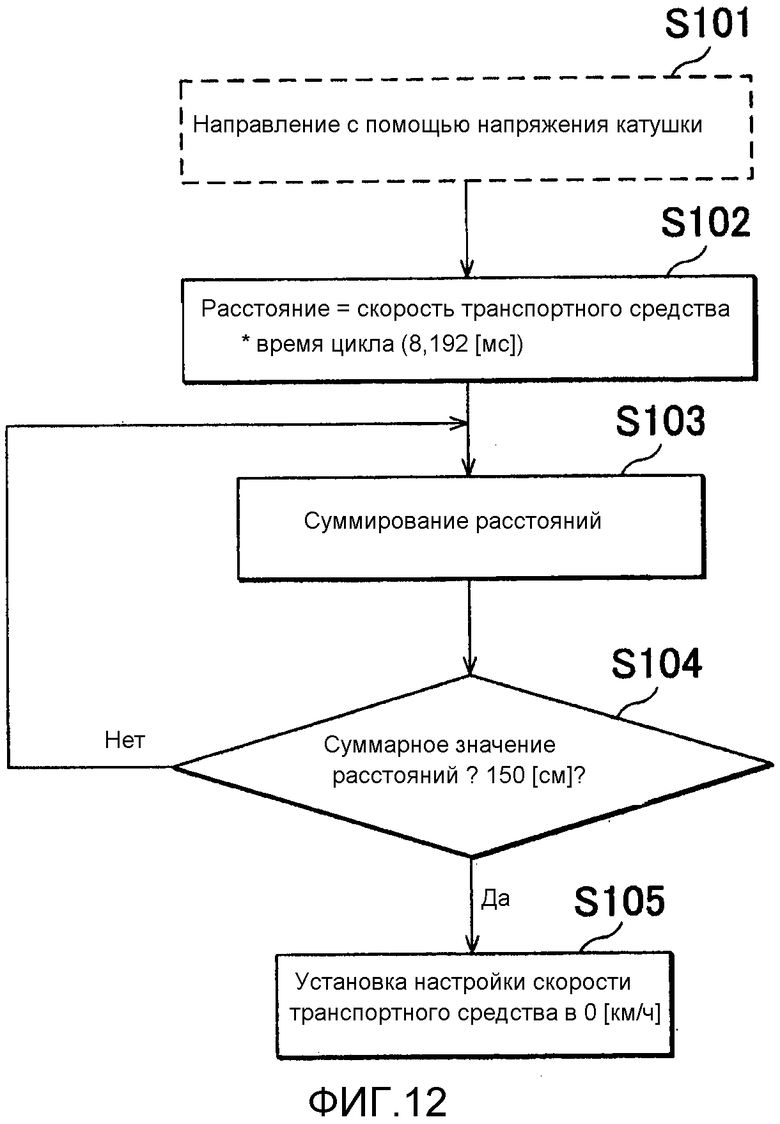
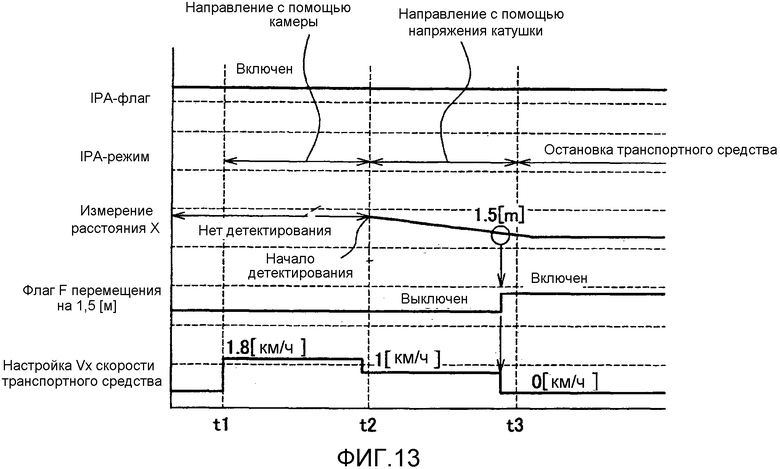

Изобретение относится к автомобилестроению, а именно к системе содействия при парковке транспортного средства. Транспортное средство содержит секцию приема бесконтактным образом электрической энергии и контроллер. Контроллер сконфигурирован для выполнения, по меньшей мере, одного из запроса блоку передачи электрической энергии на прекращение передачи электрической энергии, прекращение движения транспортного средства, и направления уведомления оператору, когда принятая электрическая энергия, которая изменяется при движении транспортного средства, не удовлетворяет заданному условию, во время, когда осуществляется передача электрической энергии от блока передачи электрической энергии. Система содействия включает в себя: камеру (120), первую направляющую секцию транспортного средства, которая распознает позицию передатчика (220) энергии, приемник (110) энергии, который принимает электрическую энергию от передатчика (220) энергии, и вторую направляющую секцию транспортного средства, которая направляет транспортное средство (100) на основе электрической энергии, принятой приемником (110) энергии. Секция управления выполняет процесс остановки транспортного средства (100), когда электрическая энергия, принятая приемником (110) энергии от передатчика (220) энергии, не удовлетворяет заданному условию. Достигается более точное направление транспортного средства при парковке для выполнения зарядки. 4 н. и 14 з.п. ф-лы, 15 ил.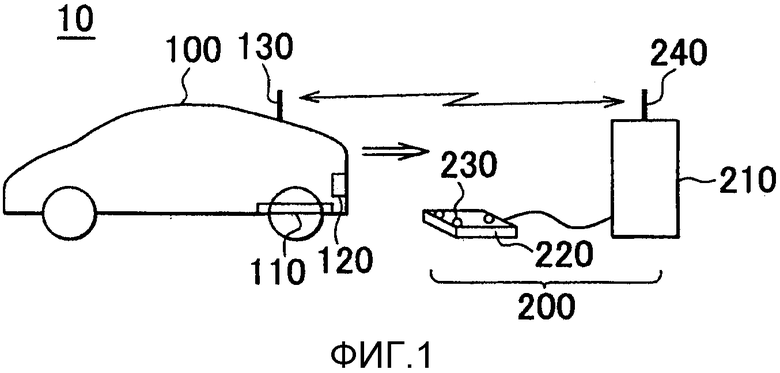
1. Транспортное средство, содержащее:
секцию приема электрической энергии, которая принимает электрическую энергию от блока передачи электрической энергии бесконтактным образом; и
контроллер, при этом
контроллер сконфигурирован для выполнения, по меньшей мере, одного из запроса блоку передачи электрической энергии на прекращение передачи электрической энергии, прекращение движения транспортного средства, и направления уведомления оператору, когда принятая электрическая энергия, которая изменяется при движении транспортного средства, не удовлетворяет заданному условию, во время, когда осуществляется передача электрической энергии от блока передачи электрической энергии.
2. Транспортное средство по п.1, в котором
контроллер сконфигурирован для выполнения, по меньшей мере, одного из запроса блоку передачи электрической энергии на прекращение передачи электрической энергии, прекращение движения транспортного средства, и направления уведомления оператору, когда принятая электрическая энергия не удовлетворяет заданному условию, даже после того, как транспортное средство переместилось на заданное расстояние, во время, когда осуществляется передача электрической энергии от блока передачи электрической энергии.
3. Транспортное средство по п.1, в котором
контроллер содержит направляющую секцию, которая направляет транспортное средство на основе принятой электрической энергии, принятой секцией приема электрической энергии.
4. Транспортное средство по п.3, в котором
контроллер сконфигурирован для выполнения, по меньшей мере, одного запроса блоку передачи электрической энергии на прекращение передачи электрической энергии, прекращение движения транспортного средства, и направления уведомления оператору, когда принятая электрическая энергия не удовлетворяет заданному условию, даже после того, как транспортное средство переместилось за пределы заданного расстояния после того, как направляющая секция начала направлять транспортное средство.
5. Транспортное средство по п.3, в котором
указанный контроллер содержит:
секцию приведения в движение транспортного средства на основе выходного сигнала из направляющей секции, и
секцию управления, которая побуждает транспортное средство к перемещению путем управления секцией приведения в движение транспортного средства.
6. Транспортное средство по п.4, в котором
указанный контроллер содержит:
секцию приведения в движение транспортного средства на основе выходного сигнала из направляющей секции, и
секцию управления, которая побуждает транспортное средство к перемещению путем управления секцией приведения в движение транспортного средства.
7. Транспортное средство по п.2, в котором
контроллер содержит направляющую секцию, которая направляет транспортное средство на основе принятой электрической энергии, принятой секцией приема электрической энергии.
8. Транспортное средство по п.7, в котором
контроллер сконфигурирован для выполнения, по меньшей мере, одного запроса блоку передачи электрической энергии на прекращение передачи электрической энергии, прекращение движения транспортного средства, и направления уведомления оператору, когда принятая электрическая энергия не удовлетворяет заданному условию, даже после того, как транспортное средство переместилось за пределы заданного расстояния после того, как направляющая секция начала направлять транспортное средство.
9. Транспортное средство по п.7, в котором
указанный контроллер содержит:
секцию приведения в движение транспортного средства на основе выходного сигнала из направляющей секции, и
секцию управления, которая побуждает транспортное средство к перемещению путем управления секцией приведения в движение транспортного средства.
10. Транспортное средство по п.8, в котором
указанный контроллер содержит:
секцию приведения в движение транспортного средства на основе выходного сигнала из направляющей секции, и
секцию управления, которая побуждает транспортное средство к перемещению путем управления секцией приведения в движение транспортного средства.
11. Транспортное средство по любому из пп.1-10, в котором предварительно заданное условие состоит в том, что принятое электрическое напряжение равно или выше первого порогового значения.
12. Транспортное средство по любому из пп.1-10, дополнительно содержащее секцию детектирования, которая детектирует принятую электрическую энергию, принятую секцией приема электрической энергии.
13. Транспортное средство по любому из пп.1-10, в котором
контроллер сконфигурирован для выполнения запроса блоку передачи электрической энергии начать передачу электрической энергии, когда сдвинутое положение изменяется к пределам парковки после того, как направлен запрос блоку передачи электрической энергии прекратить подачу электрической энергии, поскольку принятая электрическая энергия, которая изменяется при движении транспортного средства, не удовлетворяет заданному условию, во время, когда осуществляется передача электрической энергии от блока передачи электрической энергии.
14. Транспортное средство по любому из пп.1-10, в котором
контроллер сконфигурирован для того чтобы, после того как принятая электрическая энергия, которая изменяется при движении транспортного средства, будет удовлетворять заданному условию, во время, когда осуществляется передача электрической энергии от блока передачи электрической энергии, направить запрос блоку передачи электрической энергии передать электрическую энергию, которая выше, чем электрическая энергия, которая была передана от блока передачи электрической энергии до того, как принятая электрическая энергия стала удовлетворять заданным условиям.
15. Транспортное средство по любому из пп.1-10, в котором
контроллер сконфигурирован для того чтобы, после того как принятая электрическая энергия, которая изменяется при движении транспортного средства, будет удовлетворять заданному условию, во время, когда осуществляется передача электрической энергии от блока передачи электрической энергии, и сдвинутое положение изменяется к пределам парковки, направить запрос блоку передачи электрической энергии передать электрическую энергию, которая выше, чем электрическая энергия, которая была передана от блока передачи электрической энергии до того, как принятая электрическая энергия стала удовлетворять заданным условиям.
16. Система содействия при парковке транспортного средства, содержащая:
секцию приема электрической энергии, которая принимает электрическую энергию от блока передачи электрической энергии бесконтактным образом;
направляющую секцию, которая направляет транспортное средство на основе полученной электрической энергии, принятой секцией приема электрической энергии, и
секцию управления, которая вызывает перемещение транспортного средства путем управления секцией приведения в движение транспортного средства, которая приводит в движение транспортное средство на основе выходного сигнала от направляющей секции транспортного средства,
отличающаяся тем, что
секция управления сконфигурирована для выполнения, по меньшей мере, одной остановки транспортного средства, передачи уведомления оператору, и направления требования блоку передачи электрической энергии на прекращение передачи электрической энергии, когда электрическая энергия, принятая секцией приема электрической энергии от блока передачи электрической энергии, не удовлетворяет заданным условиям даже после того, как секция управления дала команду через секцию приведения в движение транспортного средства на перемещение транспортного средства за пределы предварительно заданного расстояния после того, как направляющая секция побуждает транспортное средство к перемещению.
17. Система содействия при парковке транспортного средства, отличающаяся тем, что содержит:
камеру, которая захватывает изображение области рядом с транспортным средством;
первую направляющую секцию транспортного средства, которая распознает позицию блока передачи электрической энергии, внешнего по отношению к транспортному средству, на основе изображения, полученного через камеру, чтобы направлять транспортное средство к блоку передачи электрической энергии;
секцию приема электрической энергии, которая принимает электрическую энергию от блока передачи электрической энергии бесконтактным образом;
вторую направляющую секцию транспортного средства, которая направляет транспортное средство на основе электрической энергии, принятой секцией приема электрической энергии; и
секцию управления, которая вызывает перемещение транспортного средства под управлением секции приведения в движение транспортного средства, которая приводит в движение транспортное средство, на основе выходных сигналов от первой и второй направляющих секций транспортного средства,
при этом секция управления выполняет процесс остановки транспортного средства, когда электрическая энергия, принятая секцией приема электрической энергии от блока передачи электрической энергии, не удовлетворяет первому условию, заключающемуся в том, что электрическая энергия равна или выше, чем первое пороговое значение, даже после того как секция управления вызвала перемещение транспортного средства под действием секции приведения в движение транспортного средства за пределы предварительно определенного расстояния, после того как первая направляющая секция транспортного средства не может детектировать позицию блока передачи электрической энергии на основе изображения.
18. Способ содействия при парковке транспортного средства, отличающийся тем, что содержит этапы, на которых:
распознают позицию блока передачи электрической энергии, внешнего по отношению к транспортному средству, на основе изображения, полученного через камеру, которая захватывает изображение области рядом с транспортным средством;
направляют транспортное средство к блоку передачи электрической энергии на основе изображения;
принимают электрическую энергию от блока передачи электрической энергии через секцию приема электрической энергии, которая принимает электрическую энергию бесконтактным образом;
направляют транспортное средство на основе электрической энергии, принятой секцией приема электрической энергии;
вызывают перемещение транспортного средства путем управления, чтобы приводить в движение транспортное средство согласно направлению на основе изображения и направлению на основе электрической энергии; и
останавливают транспортное средство, когда электрическая энергия, принятая секцией приема электрической энергии от блока передачи электрической энергии, не удовлетворяет первому условию, заключающемуся в том, что электрическая энергия равна или выше, чем первое пороговое значение, даже после того как транспортное средство переместилось за пределы предварительно определенного расстояния, после того как становится невозможным детектировать позицию блока передачи электрической энергии на основе изображения.
| EP 1930203 A1, 11.06.2008 | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| US 7239958 B2, 03.07.2007; | |||

