ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится, в целом, к устройству, относящемуся к системе транспортировки.
Более конкретно, настоящее изобретение имеет свое применение в устройстве, относящемся к указанной системе транспортировки, которая приспособлена для горизонтального перемещения ряда скоординированных платформенных блоков.
Еще более конкретно, настоящее изобретение найдет применение в одном подобном устройстве, относящемся к системе транспортировки, которое приспособлено для обеспечения подвижной транспортировки посредством горизонтально ориентированного смещающего движения ряда платформенных блоков, с локализованными платформенными сегментами или одним или более опорными столами в каждой, скоординированными в пределах «замкнутого» пути транспортировки и ориентированных для его образования.
Протяженность такого пути транспортировки и последовательное прохождение платформенных блоков и/или опорных столов, вдоль протяженности бесконечного или замкнутого пути транспортировки, могут, тогда, быть приспособлены конкретно для сборки и/или изготовления элементов и/или модулей, таких как готовые промышленные изделия или полуфабрикаты, в соответствии с "принципом бесконечной сборочной линии".
Главным образом, настоящее изобретение предназначено для применения в области транспортировки или перемещения тяжелых платформенных блоков, предназначенных поддерживать один или более тяжелых производимых элементов и/или модулей, на протяжении бесконечного пути транспортировки, где раскрытый порядок транспортировки может быть пошаговым и приводится в движение наиболее подходящим образом, напрямую или опосредованно посредством присоединяемых устройств с поршневым цилиндром.
Настоящее изобретение предназначено для того, чтобы оно было преимущественно приспособлено и применялось в системе, которая проиллюстрирована и описана более подробно в Шведской патентной заявке 07 00441-9, озаглавленной "Transport system adapted to be able to offer a sequential assembly of house bodies", и соответствующей ей Международной патентной заявке с присвоенным серийным номером PCT/SE2008/000136.
Содержание указанной патентной заявки необходимо считать осуществленной частью содержания данной патентной заявки, для того, чтобы сделать понятными определенные детали в связи с принципом применения изобретения.
Настоящее изобретение предназначено для применения для тяжелых платформенных блоков с собственной массой до приблизительно 200 кг/м2 и с разрешенной нагрузкой до приблизительно 250-300 кг/м2.
УРОВЕНЬ ТЕХНИКИ
Способы, устройства и конструкции, относящиеся к раскрытой выше области техники, и с назначением и сущностью, которые удовлетворяют установленным требованиям, ранее известны во множестве различных вариантов осуществления.
В качестве одного примера уровня техники и области техники, к которым относится настоящее изобретение, можно упомянуть подвижное устройство для транспортировки, приводимое в движение посредством гидроцилиндров для того, чтобы непрерывно или дискретно способствовать перемещению сборочных столов и т.п. вдоль протяжения конечного или бесконечного пути транспортировки, и где каждый из указанных сборочных столов расположен так, чтобы последовательно обеспечить возможность его остановки и/или прохождения среди некоторого последовательно достижимого множества пунктов сборки.
В технологии предшествующего уровня техники, также сообщалось о применении ряда скоординированных платформенных блоков, где происходит желаемое скоординированное перемещение с помощью единственного устройства для транспортировки.
В уровне техники также известно, что вызванное перемещение очень тяжелых платформенных блоков со своими отдельными платформенными сегментами и очень тяжелых грузов и/или деталей в качестве элементов и/или модулей, переносимых на них, сталкивается с очень конкретными проблемами для того, чтобы была возможность создать точное выравнивание участка перемещения (участок прямого перемещения или изогнутого, такой как участок перемещения, образованный под прямым углом), в сочетании с эффективностью, способной преодолеть и просто превозмочь не только трение покоя, но также возникающее трение скольжения между опорной поверхностью или основанием.
Таким примером, также образующим часть уровня техники, является содержание Германской патентной публикации DE-A1-4141829.
Указанная патентная публикация раскрывает устройство, трансформирующее первое направление перемещения во второе направление перемещения, ориентированное под прямыми углами, где длинная дистанция перемещения для первого направления перемещения может быть трансформирована в короткую дистанцию перемещения для второго направления перемещения.
Данная трансформация здесь происходит посредством шипованного устройства, которое взаимодействует с «прямым» желобом или прямой скошенной прорезью в плите для того, чтобы, посредством движения шипованного устройства в одном направлении, способствовать перемещению плиты в другом направлении, и где соотношение между скоростями движения является постоянным.
Предыдущий уровень техники также включает содержание Патентной публикации DE-A1-3344034, где описано использование производственного помещения и производственной линии, в которой в промежуточной секции (25) используется путь перемещения для изготовления больших элементов посредством использования технологии отливки бетона.
Здесь предложено применение двух ориентированных примыкающим образом нагревающих туннелей (2, 3 на Фиг.3), каждый представляющий собой траектории или пути (4, 5) и траектории или пути (7, 8).
Данная публикация раскрывает две ориентированные параллельно производственные линии (I; II) для изготовления паллет.
Патентная публикация DE-A1-2338445 раскрывает способ и устройство для изготовления элементов или установок в форме паллет.
Здесь предложены подготовительные секции (1-3) в первом сегменте производственной линии, перпендикулярно к указанной производственной линии размещенная линия транспортировки или средство перемещения для транспортировки паллет к производственным секциям (4, 5, 6 и 7).
Секции (1-3) в пределах подготовительной линии транспортировки и секции (4-7) в пределах производственной линии ориентированы параллельно.
Каждая паллета имеет прямоугольную форму и транспортируется в направлении вдоль длинных сторон.
Патентная публикация US-A-3962773 относится к способам производства предварительно изготавливаемой строительной секции или объемных блоков и к фабрикам для осуществления таких способов.
В соответствии с этим изобретением предоставлен способ производства предварительно изготавливаемых строительных секций на производственной линии, причем способ включает в себя стадии сборки предварительно изготавливаемых панелей на по меньшей мере одном сборочном стенде, размещения и удерживания панелей на данном стенде в своих правильных относительных положениях, скрепления панелей друг с другом в таких положениях для формирования секций, которые находятся в по меньшей мере по существу завершенном структурном состоянии, и перемещения собранных секций из сборочного стенда для завершающих операций на следующей части производственной линии.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ПРОБЛЕМА
Принимая во внимание то обстоятельство, что соображения технического порядка, которые должны сделать специалисты в данной области техники для того, чтобы быть в состоянии предложить решение одной или более поставленных технических проблем, с одной стороны, изначально необходимо проникновение в суть мероприятий и/или последовательности мероприятий, которые должны быть выполнены, а с другой стороны, необходим выбор требуемых средств, с точки зрения следующих технических проблем, которые, вероятно, являются значимыми в развитии предмета настоящего изобретения.
Принимая во внимание состояние уровня техники, как описано выше, вероятно возможно, вследствие этого, увидеть техническую проблему, чтобы быть в состоянии реализовать важность преимуществ, связанных с решениями и/или соображениями технического порядка, которые потребуются для того, чтобы в устройстве для транспортировки, предназначенном для перемещения ряда скоординированных платформенных установок, раскрыть использование средства, которое непосредственно или опосредованно приспособлено предоставить свой локализованный платформенный блок, приспособленный опираться на поверхности скольжения в виде закрепленных направляющих рельс, ориентированных в выбранном направлении перемещения.
Остается техническая проблема в том, чтобы быть в состоянии реализовать важность преимуществ, связанных с решениями и/или соображениями технического порядка, которые потребуются для того, чтобы ориентировать тянущие и/или толкающие брусья, ориентированные параллельно и локализованные для указанного средства, примыкающим образом и/или между указанными закрепленными поверхностями скольжения.
Остается техническая проблема в том, чтобы быть в состоянии реализовать важность преимуществ, связанных с решениями и/или соображениями технического порядка, которые потребуются для того, чтобы приспособить средство, чтобы оно придавало своему локализованному платформенному блоку пошаговое смещающее движение в направлении перемещения, связанном с направлением движения указанного средства или противоположном к нему.
Остается техническая проблема в том, чтобы быть в состоянии реализовать важность преимуществ, связанных с решениями и/или соображениями технического порядка, которые потребуются для того, чтобы ориентировать средство, со своими первыми локализованными платформенными блоками, и указанное второе средство, со своими вторыми локализованными платформенными блоками, параллельно при локализованном расстоянии между ними.
Остается техническая проблема в том, чтобы быть в состоянии реализовать важность преимуществ, связанных с решениями и/или соображениями технического порядка, которые потребуются для того, чтобы приспособить третье средство, чтобы оно способствовало приданию платформенному блоку, локализованному для средства, смещающего движения, от указанного первого платформенного блока к указанному второму платформенному блоку, ориентированным параллельно.
Остается техническая проблема в том, чтобы быть в состоянии реализовать важность преимуществ, связанных с решениями и/или соображениями технического порядка, которые потребуются для того, чтобы скоординировать смещающее движение, созданное или вызванное посредством указанного третьего средства, для одного единственного или нескольких отдельных платформенных сегментов.
Остается техническая проблема в том, чтобы быть в состоянии реализовать важность преимуществ, связанных с решениями и/или соображениями технического порядка, которые потребуются для того, чтобы с помощью, между прочим, указанных платформенных блоков или сегментов, ориентированных параллельно, быть в состоянии предложить структурированную, последовательную сборку в соответствии с "принципом сборочной линии".
Остается техническая проблема в том, чтобы быть в состоянии реализовать важность преимуществ, связанных с решениями и/или соображениями технического порядка, которые потребуются для того, чтобы вызвать прохождение одновременной сборки множества каркасов зданий, элементов продукции и/или устройств, целых или полуфабрикатов, в каком случае один или более платформенных сегментов, скоординированных в первом указанном платформенном блоке и для него, один или более платформенных сегментов в указанном втором платформенном блоке и для него, посредством указанного третьего средства, подвижно располагают в двух направлениях, ориентированных противоположно относительно друг друга.
Остается техническая проблема в том, чтобы быть в состоянии реализовать важность преимуществ, связанных с решениями и/или соображениями технического порядка, которые потребуются для того, чтобы вызвать наличие первого смещающего движения посредством второго средства, локализованного для своего первого платформенного блока, и наличие второго противоположно направленного смещающего движения посредством своего четвертого средства, локализованного во втором платформенном блоке, где первое средство перемещения приспособлено для того, чтобы способствовать перемещению нескольких платформенных сегментов в пределах платформенного блока от первого ко второму, в качестве альтернативы от второго к первому, при этом третье средство перемещения должно быть приспособлено для того, чтобы вызывать перемещение выбранного количества платформенных блоков, поддерживая целые изделия или полуфабрикаты, от второго к первому, в качестве альтернативы от первого ко второму платформенному блоку.
Остается техническая проблема в том, чтобы быть в состоянии реализовать важность преимуществ, связанных с решениями и/или соображениями технического порядка, которые потребуются для того, чтобы "первое", "второе", "третье" и/или "четвертое" средства включали один или более тянущих и/или толкающих брусьев (или плечей), и чтобы они были заглублены в плоскую опорную поверхность для указанных поверхностей скольжения.
Остается техническая проблема в том, чтобы быть в состоянии реализовать важность преимуществ, связанных с решениями и/или соображениями технического порядка, которые потребуются для того, чтобы придать указанным тянущим и/или толкающим брусьям «U»-образное поперечное сечение, где центральный участок, взаимосвязывающий свои фрагменты поперечного сечения, может иметь пазы, предназначенные и специально сформированные в качестве несущего приспособления, и ориентированные в ряды, так что каждый один из данных пазов будет в состоянии быть окруженным своим локализованным средством высвобождения и/или блокировки и вызывать взаимодействие с ним.
Остается техническая проблема в том, чтобы быть в состоянии реализовать важность преимуществ, связанных с решениями и/или соображениями технического порядка, которые потребуются для того, чтобы опирать платформенные блоки, в пределах их нижних сторон, на несущие приспособления, ориентированные параллельно с пазами, причем каждое несущее приспособление приспособлено быть в состоянии взаимодействовать со своим локализованным высвобождающим и/или блокировочным средством.
Остается техническая проблема в том, чтобы быть в состоянии реализовать важность преимуществ, связанных с решениями и/или соображениями технического порядка, которые потребуются для того, чтобы каждое одно из первого, второго, третьего и/или четвертого средств или выбранное из них включало устройство с поршневым цилиндром с гидравлическим приводом, ориентированное за пределами платформенных установок и/или указанных платформенных сегментов для того, чтобы сообщать указанным толкающим или тянущим брусьям возвратно-поступательный и скоординированный характер смещающего движения.
Остается техническая проблема в том, чтобы быть в состоянии реализовать важность преимуществ, связанных с решениями и/или соображениями технического порядка, которые потребуются для того, чтобы приспособить блок управления выборочно и скоординированно во времени или обособленно во времени влиять на одно или более из указанных устройств с поршневым цилиндром для того, чтобы способствовать пошаговому перемещению платформенных блоков и отдельных или скоординированных платформенных сегментов, ориентированных по бесконечному пути.
Остается техническая проблема в том, чтобы быть в состоянии реализовать важность преимуществ, связанных с решениями и/или соображениями технического порядка, которые потребуются для того, чтобы указанный блок управления оперативно приводил в действие указанное устройство с поршневым цилиндром в соответствии со схемой запуска технологической последовательности, управляемой программой обработки данных, включенной в компьютерный блок.
РЕШЕНИЕ
В данном примере настоящее изобретение берет в качестве своей отправной точки или источника технологию предыдущего уровня техники, как раскрыто во вступлении в виде ряда устройств для транспортировки, предназначенных для перемещения скоординированных платформенных блоков, точнее в соответствии с преамбулой пункта 1 приложенной формулы изобретения.
Для того чтобы быть в состоянии решить одну или более раскрытых выше технических проблем, настоящее изобретение более конкретно раскрывает, что технология предыдущего уровня техники дополняется признаками, упомянутыми в отличительной части пункта 1.
Настоящее изобретение дополнительно относится к предлагаемому варианту осуществления, находящемуся в пределах объема правовых притязаний основной идеи настоящего изобретения, как раскрыто в зависимых пунктах формулы изобретения.
ПРЕИМУЩЕСТВА
Теми преимуществами, которые могут принципиально считаться характерной особенностью настоящего изобретения, и конкретными существенными отличительными признаками, раскрытыми в нем, являются такие, которые, в связи с этим, были созданы или вызваны предварительными условиями, для того, чтобы, в устройстве для транспортировки, предназначенном для перемещения ряда скоординированных платформенных блоков, способствовать использованию опорной поверхности или опорных или направляющих рельсов для того, чтобы поддерживать тяжелые платформенные блоки как таковые для плавного перемещения с тяжелыми, последовательно собираемыми, частично или полностью, элементами и/или промышленными изделиями, такими как каркасы зданий с оборудованием в форме модулей, опирающимися на выбранные платформенные блоки и/или платформенные сегменты, включая смоделировано сформированные выбранные платформенные блоки и сегменты.
То, что может принципиально считаться отличительной особенностью настоящего изобретения, раскрыто в отличительной части пункта 1 прилагаемой формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ПРИЛАГАЕМЫХ ЧЕРТЕЖЕЙ
Одно предлагаемое теперь применение и относящийся к нему вариант осуществления настоящего изобретения в системе транспортировки и один предпочтительный вариант осуществления устройства, относящегося к транспортировке, демонстрирующие существенные отличительные признаки, связанные с настоящим изобретением, будут теперь описаны более подробно ниже в качестве примера со ссылкой на прилагаемые чертежи, где:
Фиг.1 показывает предлагаемый и предпочтительный бесконечный конвейерный путь в плане в системе транспортировки, с рядом платформенных блоков и платформенных сегментов, к нему относящихся, в первом положении и первой технологической последовательности;
Фиг.2 показывает предлагаемый и предпочтительный бесконечный конвейерный путь в плане в системе транспортировки, с рядом платформенных блоков и платформенных сегментов, к нему относящихся, в проиллюстрированном втором положении и второй технологической последовательности;
Фиг.3 показывает предлагаемый и предпочтительный бесконечный конвейерный путь в плане в системе транспортировки, с рядом платформенных блоков и платформенных сегментов, к нему относящихся, в проиллюстрированном третьем положении и третьей технологической последовательности;
Фиг.4 представляет собой перспективное изображение принципов платформенного блока, который в системе транспортировки скоординирован с рядом из восьми платформенных сегментов, где
Фиг.5 представляет собой перспективное изображение и покомпонентное представление изображения тянущих и/или толкающих брусьев или приспособлений из брусьев, ориентированных под прямым углом (90°), включенных в устройство, относящееся к транспортировке, в соответствии с раскрытиями изобретения, где каждый один из данных брусьев должен находиться во взаимодействии со своим средством перемещения брусьев, таким как первое средство и четвертое средство;
Фиг.6 представляет собой боковую вертикальную проекцию блокировочного средства, встроенного в брус, и занимающего верхнее положение для того, чтобы в связи с этим блокировать свое взаимодействие с рейкой со сформированными отверстиями, где рейка жестко связана с платформенным блоком или с платформенным сегментом;
Фиг.7 представляет собой боковую вертикальную проекцию блокировочного средства, встроенного в брус, в соответствии с Фиг.6, занимающего нижнее положение, отжатого рейкой со сформированными отверстиями, для того чтобы, в связи с этим, высвободить свое блокирующее взаимодействие с отверстиями рейки со сформированными отверстиями, где рейка жестко связана с платформенным блоком или с платформенным сегментом;
Фиг.8 показывает схематично изображение в плане и в блок-схеме системы транспортировки с устройством, связанным с транспортировкой, которое способствует иллюстрированию принципа управления изобретения с четырьмя установками средств возвратно-поступательного перемещения, где каждое средство подсоединено к направляющему устройству;
Фиг.9 показывает четко выраженную согласованность, действенную для настоящего изобретения, между первым опорным и ходовым рельсом и платформенным сегментом (слева) и между вторым опорным и ходовым рельсом и платформенным сегментом (справа) с блокировочным средством в полностью отжатом положении;
Фиг.10 представляет собой перспективное изображение единственного платформенного сегмента, частично опирающегося непосредственно или опосредованно на четыре показанных параллельно-ориентированных плоских опорных и ходовых рельса, опирающихся на опорную поверхность и связанных под прямыми углами с удлиненной стороной платформенного сегмента, с другой стороны опирающегося на рейки со сформированными отверстиями или реечные секции, непосредственно прикрепленные к платформенному сегменту и ориентированные между ними, где данные рейки или реечные секции приспособлены в дополнение взаимодействовать, опираясь непосредственным образом, с двумя брусьями, сформированными с «U»-образной формой в поперечном сечении, с направленными вверх с блокировочными средствами, они также прикрепляются к указанной опорной поверхности, что также соответственно, однако, упрощает расположение для опорного и ходового рельсов, которые образуют прямые углы с короткой стороной 1Аа платформенного сегмента;
Фиг.11 представляет собой боковую вертикальную проекцию альтернативного варианта осуществления блокировочного средства, проиллюстрированного на Фиг.6, занимающего блокирующее положение, которое, на фоне действия пружинного элемента, может занимать нижнее, а не блокирующее положение; и
Фиг.12 иллюстрирует один вариант осуществления, где первое направление перемещения трансформируется посредством устройства во второе направление перемещения, ориентированное к нему под прямым углом, в соответствии с использованием изогнутого контура, где начальное перемещение выбрано как незначительное, промежуточное ориентированное перемещение выбрано как значительное, а завершающее перемещение повторно выбрано как незначительное.
ОПИСАНИЕ ПРЕДЛАГАЕМОГО В НАСТОЯЩЕЕ ВРЕМЯ
ВАРИАНТА ОСУЩЕСТВЛЕНИЯ
В качестве введения необходимо подчеркнуть, что в следующем описании одного предлагаемого в настоящее время варианта осуществления, который показывает существенные отличительные признаки, связанные с изобретением, и который разъясняется посредством фигур, показанных на прилагаемых чертежах, термины и специальная терминология были выбраны, главным образом, с намерением в таком случае способствовать пояснению идеи изобретения.
Со ссылкой на прилагаемые Фиг.1-4, таким образом, схематично и подробно проиллюстрированы основные предварительные условия для системы транспортировки.
Таким образом, Фиг.1, 2 и 3 показывают систему транспортировки 1, созданную из платформенных конструкций со скоординированными платформенными блоками, где каждый такой блок состоит из равного или неравного количества, но множества платформенных сегментов, и локализованных различных транспортных последовательностей, и такая система приспособлена для того, чтобы быть в состоянии перемещать, непрерывно или пошагово, вытянутый набор платформенных сегментов от А1 до А8, ориентированных поперек по отношению к направлению транспортировки "D1" и "D2", подходящих для каждого одного из платформенных блоков 1А, 2А, 3А…9А.
С помощью устройства транспортировки "Т", которое взаимодействует с множеством платформенных сегментов А1', А2', A3'…А8' (на Фиг.4), ориентированных так, что они параллельно скоординированы с отдельными платформенными блоками, такими как 1А, где характер перемещения для данных платформенных блоков 1А-9А и платформенных сегментов A1'…A8' (платформа 1А и следующие платформы), приспособлен для того, чтобы быть в состоянии обеспечить последовательную сборку, структурированную в соответствии с "принципом сборочной линии", множества каркасов зданий ими полностью или частично законченной продукции, элементов и/или модулей.
Изначально это происходит посредством помещения на платформенный сегмент А6' и А7' (Фиг.4) в пределах платформенного блока 1А металлического каркаса 5 и скоординированных модульных профилей 8, 8' и изготовления на месте для производства напольных элементов 2, а также последующего помещения на напольный элемент 2 и его бетонную панель 4, предназначенных для зданий модулей, элементов конструкций, частей конструкций и т.д. (не показано), и используемого подвижно расположенного платформенного блока, который должен последовательно двигаться из 1А в 9А, для поддерживания проиллюстрированного одного напольного элемента 2 или другого (2) напольного элемента для одного или более каркасов зданий.
Напольный элемент (2) помещается на платформенных сегментах А2', A3' и А4'.
Указанная платформенная конструкция, со своими платформенными блоками 1А…9А, где каждый платформенный блок 1А составлен из отобранного множества платформенных сегментов А1', А2',…А8', с помощью средств перемещения, связанных с системой транспортировки, подвижно расположена в двух направлениях, ориентированных навстречу друг другу, где первое направление "D1" придано первому ряду платформенных блоков 1А, 2А, 3A, 4А и 5А, а второе направление "D2" придано второму ряду платформенных блоков 6А, 7А, 8А и 9А, с представлением буферной зоны, (расположенной здесь на Фиг.1 под платформенным блоком 6А).
Необходимо отметить, что платформенный блок может быть смоделированным, так как он может содержать в себе один или более платформенных сегментов.
Фиг.2 иллюстрирует, как скоординированный блок, в виде отобранного количества платформенных сегментов 5А1…5А8 в пределах платформенного блока 5А, включенного в указанный первый ряд платформенных блоков 1А…5А, был перемещен посредством устройства транспортировки "Т" влево, для того, чтобы занять место выбранной буферной зоны и, в связи с этим, быть в состоянии скоординировано включиться во вторую ориентацию ряда платформенных блоков 6А…9А.
Фиг.3 иллюстрирует промежуточное положение, где платформенный блок 9А, свободный от каркасов узлов и/или модулей зданий, локализованных для платформенных сегментов 9А8, 9А7, перемещается для того, чтобы сформировать новый платформенный блок (1А).
Фиг.4 предназначена для иллюстрирования того, что на укомплектованном платформенном блоке 1А со своими платформенными сегментами от А1' до А8' находятся изготовленные или расположенные один или более напольных элементов 2, (2) с наружным «U»-образным металлическим каркасом 5, с поперечно ориентированными металлическими профилями 8, 8' со сквозными отверстиями, подстилающей изоляционной панелью или матом 7 и бетонной панелью 4, разделенной на секции 4', 4" и образующей верхнюю рабочую поверхность 4а.
Конструкция данного напольного элемента проиллюстрирована и описана более подробно в поданной Шведской патентной заявке 07 00440-1, названной "Напольный элемент" и ее соответствующей Международной патентной заявке, наделенной серийным номером PCT/SE2008/000134.
Соответственно тому, как данный или данные напольные элементы 2, (2) перемещаются в указанном первом направлении движения "D1", к данным напольным элементам 2, (2) прилагаются отдельные модули, элементы конструкций, детали конструкций, модули и т.д. в пределах указанного первого платформенного блока 1А, который в процессе перемещения занимает положение ряда платформенных блоков 2А, 3A, 4А и 5А.
Когда для платформенного блока А1 заканчивается расстояние перемещения вдоль первого направления "D1", дальше по ходу к платформенному блоку под ссылочным номером 4А, скоординированное количество (восемь) платформенных сегментов, таких как от 5А1 до 5А8, или менее, перемещаются для того, чтобы сформировать часть примыкающего второго платформенного блока и там им придается второе направление перемещения "D2", в соответствии с Фиг.2, и в течение данного расстояния транспортировки смоделированных платформенных блоков 6А, 7А, 8А и 9А, не показанные каркасы зданий и/или их полуфабрикаты дополнительно укомплектовываются до законченного продукта, все еще опирающиеся на их собственные платформенные сегменты А6', А7' и A2', A3' и А4' соответственно, хотя и перемещенные в качестве смодулированного платформенного блока из положения одного платформенного блока в положение соседнего платформенного блока.
Перемещение одного или более платформенных сегментов 9А4 от завершающего девятого платформенного блока 9А4 к первой платформенной установке (1А) в соответствии с Фиг.3 может происходить фрагментарно и/или парами, в зависимости от необходимости.
Перемещение платформенных сегментов от девятого платформенного блока к первому платформенному блоку обычно происходит скоординированно, например по 5-10 платформенных сегментов посредством использования третьего средства (М3). Перемещение от пятого платформенного блока к шестому платформенному блоку также происходит скоординированно, например по 5-10, скажем по восемь, платформенных сегментов.
Когда платформенный блок 1А со своими двумя напольными элементами 2, (2) перемещается в положение, обозначенное ссылочным номером 5А, платформенные сегменты A1'-A4' могут, конечно, в качестве единого блока, быть перемещены влево, в то время как платформенные сегменты А6 и А7 перемещаются влево на выбранный временной интервал позже, причем в этом случае напольные элементы 2 и (2) могут изменить место в производственной линии с указанного блока 6А на 9А.
Со ссылкой на прилагаемые Фиг.5-12, таким образом, схематично и подробно проиллюстрированы не только основные предварительные условия, касающиеся устройства, связанного с транспортировкой, раскрытым для настоящего изобретения, но более того, значимым отличительным особенностям, связанным с изобретением, была придана конкретная форма в результате предлагаемого теперь варианта осуществления, описанного более подробно ниже.
Таким образом, Фиг.5 представляет собой перспективное изображение и покомпонентное представление изображения тянущих и/или толкающих брусьев или приспособлений из брусьев, ориентированных под прямым углом (90°), включенных в устройство, связанное с транспортировкой, где каждый один из данных брусьев, брус 50 и брус 51, должны находиться во взаимодействии со своим средством перемещения брусьев, таким как первое средство "М1" и четвертое средство "M4" в виде устройств с поршневыми цилиндрами, проиллюстрированных на Фиг.8.
Фиг.5 также показывает, в перспективном изображении и в покомпонентном представлении, тянущие и/или толкающие брусья 50, 51, перемещаемые возвратно-поступательным способом и ориентированные под прямым углом (90°), где каждый один из данных брусьев должен находиться во взаимодействии со своим средством перемещения брусьев, таким как указанное первое средство (М1) и указанное четвертое средство (М4), и где Фиг.8 иллюстрирует наличие других второго и третьего средств (М2) и (М3).
Фиг.8 предназначена для того, чтобы проиллюстрировать перемещение по часовой стрелке отдельных смоделированных платформенных блоков, но ничто не мешает вместо этого созданию предварительных условий для смещающего движения против часовой стрелки.
Фиг.8 иллюстрирует схематично и на виде сверху систему транспортировки (см. Фиг.1-3) с четырьмя наборами средств перемещения, таких как плечи 50, 51, где каждый набор подсоединен только к одному, схематично проиллюстрированному направляющему или управляющему устройству 81, с компьютерным блоком 82 и памятью 83 для хранения программ и памятью 83' устройства управления.
На Фиг.5 дополнительно проиллюстрировано, что плечо 50, а также другие плечи, ориентированные параллельно (не показано), являются прямыми и демонстрируют ряд последовательно упорядоченных блокировочных средств 50а, 50b, причем такие блокировочные средства предназначены для того, чтобы быть в состоянии взаимодействовать с отверстиями 53b в рейке 53 со сформированными отверстиями.
Выбранные плечи должны быть скоординированы для совместного перемещения, попарно или в большем количестве (см. Фиг.12).
Фиг.5 дополнительно иллюстрирует, что плечо 51, а также другие плечи (не показано), ориентированные параллельно, в принципе, являются прямыми, но с «U»-образным участком 51'' для того, чтобы посредством этого быть в состоянии воздействовать и вызывать свободное возвратно-поступательное перемещение плеча 50 в той же самой плоскости, что и плечо 51.
Данное плечо 51 перемещает ряд последовательно ориентированных блокировочных средств 51а, 51b, 51с и 51d, причем такие блокировочные средства 51а, 51b предназначены для того, чтобы быть в состоянии взаимодействовать со сформированными отверстиями 53а, 53b в рейке 53 со сформированными отверстиями, где расстояние между отверстиями 53а, 53b здесь выбрано до 2,5 см.
Блокировочные средства 50а, 50b в своем верхнем положении предназначены для взаимодействия с локализованными отверстиями в рейке 53 со сформированными отверстиями.
Фиг.6 схематично иллюстрирует блокировочное средство 51а, встроенное в плечо или брус 51, и занимающее верхнее положение, для того, чтобы, таким образом, блокировать свое взаимодействие с отверстием 53а рейки 53 со сформированными отверстиями, а более конкретно, с ее кромкой 53а', где рейка 53 должна быть неподвижна по отношению к платформенному блоку или к платформенному сегменту.
Фиг.7 также показывает еще одно положение для блокировочного средства 51а, встроенного в брус 51 в соответствии с Фиг.6, и занимающего нижнее положение, отжатое рейкой 53 со сформированными отверстиями, для того, чтобы в связи с этим, обеспечить возможность высвободиться из своего блокирующего взаимодействия с отверстием 53а рейки 53 со сформированными отверстиями и его кромкой 53а', где рейка является неподвижной по отношению к платформенному блоку или к платформенному сегменту.
Фиг.9 теперь иллюстрирует четко выраженную согласованность, обеспечиваемую изобретением, между первым опорным и ходовым рельсом 55а и платформенным сегментом (слева) и ориентированность между вторым опорным и ходовым рельсом 55, 55а и платформенным сегментом с блокировочным средством 51а в отжатом положении.
Фиг.10 теперь показывает в перспективном изображении единственный платформенный сегмент, с одной стороны опирающийся непосредственно или опосредованно на четыре показанных плоских опорных и ходовых рельса 55, 55а, 55b и 55 с, ориентированных параллельно и поддерживаемых опорной поверхностью "S" и относящихся под прямыми углами к удлиненной стороне платформенного сегмента "А1".
Платформенный сегмент "А1" опирается на рейки 53, 53' со сформированными отверстиями или реечные секции, ориентированные между ними и непосредственно прикрепленные к платформенному сегменту, где данные рейки или реечные секции, кроме того, приспособлены взаимодействовать непосредственно, в опоре, с двумя брусьями 51, 51', сформированными "U"-образной формой в поперечном сечении, снабженными направленными вверх блокировочными средствами 51а, 51b, которые также прикреплены к указанной опорной поверхности "S", что соответствует, однако, упрощенно, расположению для опорного и ходового рельсов, которые образуют прямые углы с короткой стороной 1Аа платформенного сегмента.
В заключение, Фиг.11 представляет собой боковую вертикальную проекцию альтернативного варианта выполнения блокировочного средства 51а, проиллюстрированного на Фиг.6 и на Фиг.9, занимающего блокирующее положение, и который против действия пружинного элемента 51е может занимать сжатое, а не блокирующее положение.
Более конкретно, настоящее изобретение, таким образом, раскрывает устройство для перемещения и транспортирования ряда скоординированных платформенных блоков.
В соответствии с изобретением, четвертое средство М4 должно, таким образом, быть приспособлено сообщать своим локализованным платформенным блокам посредством двух или более тянущих или толкающих брусьев пошаговое смещающее движение, где указанный платформенный блок должен быть приспособлен опираться на поверхности скольжения, ориентированные в выбранном направлении перемещения.
Более конкретно, раскрыто, что тянущие и/или толкающие брусья 51, 51', локализованные для средства М4 и ориентированные параллельно, должны быть ориентированы примыкающим образом и/или между указанными поверхностями 55-55 с скольжения.
Второе средство М2 должно быть приспособлено сообщать своим локализованным платформенным блокам пошаговое смещающее движение D1 в направлении перемещения, противоположном к направлению перемещения D2 указанного четвертого средства М4.
Таким образом, указанное второе средство М2, со своими локализованными платформенными блоками, и указанное четвертое средство М4, со своими локализованными платформенными установками, должны быть ориентированы параллельно на заданном расстоянии между ними.
Третье средство М3 теперь должно быть приспособлено сообщать своему локализованному платформенному блоку или сегментам смещающее движение от указанного первого ряда платформенных блоков к указанному второму ряду платформенных блоков.
Более конкретно, смещающее движение, созданное посредством указанного третьего средства М3, должно быть скоординировано с единственным или несколькими платформенными блоками.
Однако с помощью указанных платформенных блоков, ориентированных параллельно, предложена структурированная, последовательная сборка в соответствии с «принципом сборочной линии", где может происходить одновременная сборка множества каркасов зданий или продукции, такой как целая или полуфабрикаты, в которой платформенные сегменты для указанного первого платформенного блока, платформенные сегменты для указанного второго платформенного блока, посредством указанного третьего средства перемещения М3, должны быть подвижно расположены в двух направлениях, ориентированных навстречу друг другу.
Первое направление перемещения D1 затем, посредством второго средства М2, должно быть придано первому платформенному блоку и/или его платформенным сегментам, а второе противоположное смещающее движение D2 может быть распределено посредством четвертого средства М4 второму платформенному блоку и/или его платформенным сегментам, где первое средство перемещения М1 приспособлено перемещать несколько платформенных сегментов из первого во второе, в качестве альтернативы из второго в первое положение смоделированного платформенного блока, а третье средство перемещения М3 может затем быть приспособлено для перемещения выбранного количества платформенных блоков и/или их платформенных сегментов, поддерживая целые изделия или полуфабрикаты, от второго к первому, в качестве альтернативы от первого ко второму платформенному блоку и/или их платформенным сегментам.
Первое М1, второе М2, третье М3 и/или четвертое М4 средства могут затем приводить в действие два или более тянущих и/или толкающих брусьев, причем данные брусья, преимущественно, будут в состоянии быть заглубленными в плоскую опорную поверхность для указанных поверхностей скольжения.
Указанным тянущим и/или толкающим брусьям должно быть придано «U»-образное поперечное сечение с центральным участком, взаимосвязывающим фрагменты поперечного сечения, образующим пазы, ориентированные в ряд, сформированные в качестве несущих приспособлений, таким образом, что каждый один из данных пазов будет в состоянии окружать и взаимодействовать с расцепляющим и/или блокировочным средством.
Платформенные блоки опираются в пределах своей нижней стороны на параллельно ориентированные несущие приспособления с пазами, причем каждый паз предназначен быть в состоянии взаимодействовать со своим локализованным освобождающим и/или блокировочным средством.
Каждое одно из (или выбранное) первое, второе, третье и/или четвертое средство, преимущественно, должно включать гидравлически приводимое в действие устройство с поршневым цилиндром за пределами платформенных блоков и/или платформенных сегментов для того, чтобы посредством него обеспечить возможность сообщения указанным парным толкающим и/или тянущим брусьям перемещения возвратно-поступательного типа.
Блок управления, кроме того, должен быть запрограммирован и непосредственно предназначен для того, чтобы выборочно и согласованно во времени или обособленно во времени приводить в действие указанное устройство с поршневым цилиндром для того, чтобы перемещать платформенные блоки и отдельные платформенные сегменты по бесконечному или имеющему скоординированные концы пути.
Указанный блок управления также должен быть установлен таким образом, чтобы приводить в действие указанное устройство с поршневым цилиндром в соответствии с технологической последовательностью, управляемой посредством программы 83, 83', включенной в компьютерный блок 82.
Изобретение, естественно, не ограничено вариантом осуществления, описанным выше с помощью примера, но может быть подвергнуто модификациям в пределах концепции изобретения, проиллюстрированной в прилагаемой формуле изобретения.
В особенности, необходимо заметить, что каждый проиллюстрированный элемент и/или схема может быть объединен с каждым другим проиллюстрированным элементом и/или схемой в пределах объема правовых притязаний для того, чтобы быть в состоянии достигать желаемой технической функции.
Устройство для транспортировки (1) предназначено для перемещения ряда скоординированных смоделированных платформенных блоков (1А-9А) и/или платформенных сегментов и применяется при сборке каркасов зданий. Устройство содержит первое средство (M1, М3) и второе средство (М2, М4), приспособленные сообщать своему локализованному платформенному блоку и/или платформенным сегментам пошаговое смещающее движение. Платформенный блок и/или платформенные сегменты приспособлены опираться на поверхности (55, 55a, 55b) скольжения, ориентированные в выбранном направлении перемещения (D1; D2). Параллельные тянущие и/или толкающие брусья (50, 51, 51'), ориентированы примыкающим образом к поверхностям скольжения и/или между ними и имеют "U"-образный участок (51”) для того, чтобы, таким образом, быть способными предоставлять и вызывать свободное возвратно-поступательное перемещение брусьев (50). Обеспечивается плавное перемещение тяжелых платформенных блоков и/или платформенных сегментов. 2 н. и 15 з.п. ф-лы, 12 ил.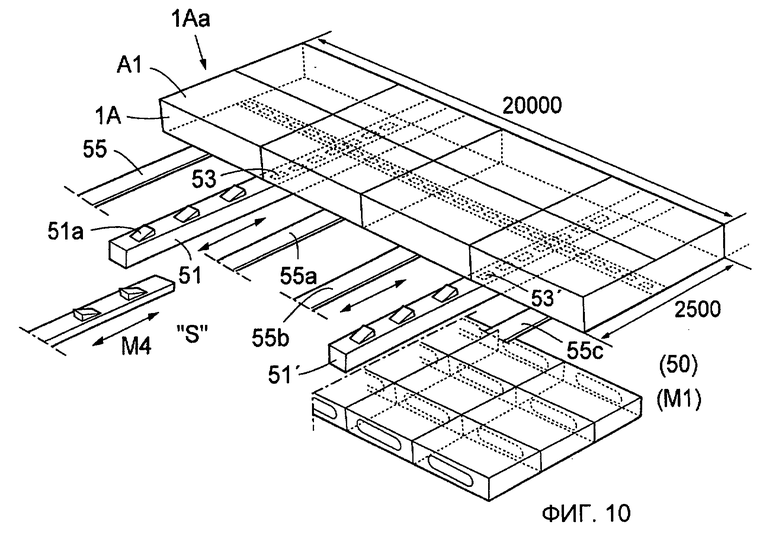
1. Устройство для транспортировки (1), предназначенное для перемещения ряда скоординированных смоделированных платформенных блоков (1А-9А) и/или платформенных сегментов, где указанный смоделированный платформенный блок содержит один или более платформенных сегментов, при этом устройство содержит первое средство (M1 и М3, соответственно) и второе средство (М2 и М4, соответственно), приспособленные сообщать своему локализованному платформенному блоку (1А-4А; 6А-9А) и/или платформенным сегментам пошаговое смещающее движение, отличающееся тем, что указанный платформенный блок (1А-9А) и/или платформенные сегменты приспособлены опираться на поверхности (55, 55а, 55b) скольжения, ориентированные в выбранном направлении перемещения (D1; D2), и параллельно ориентированные тянущие и/или толкающие брусья (50, 51, 51'), локализованные для указанных первого или второго средства, ориентированы примыкающим образом к указанным поверхностям (55, 55b) скольжения и/или между ними, при этом параллельно ориентированные брусья (51) имеют U-образный участок (51”) для того, чтобы, таким образом, быть способными предоставлять и вызывать свободное возвратно-поступательное перемещение брусьев (50).
2. Устройство для транспортировки по п.1, отличающееся тем, что второе средство (М2) приспособлено сообщать своему локализованному платформенному блоку (1А-4А) пошаговое смещающее движение и в направлении перемещения (D1), противоположном к направлению перемещения (D2), четвертого средства (М4).
3. Устройство для транспортировки по п.1 или 2, отличающееся тем, что указанные вторые средства (М2, М4), со своими локализованными платформенными блоками (1А-4А; 6А-9А) и/или платформенными сегментами, ориентированы параллельно на заданном расстоянии между ними.
4. Устройство для транспортировки по п.1, отличающееся тем, что третье средство (М3) приспособлено сообщать своему локализованному платформенному блоку и/или платформенным сегментам смещающее движение от одного смоделированного платформенного блока (1А-4А) и/или платформенных сегментов к другому смоделированному платформенному блоку (6А-9А) и/или платформенным сегментам.
5. Устройство для транспортировки по п.4, отличающееся тем, что смещающее движение, созданное или вызванное посредством указанного третьего средства (М3), скоординировано только для одного или нескольких платформенных сегментов (5А1; 5А8), локализованных на платформенном блоке (5А).
6. Устройство для транспортировки по п.3, отличающееся тем, что с помощью по меньшей мере двух из указанных параллельно ориентированных платформенных блоков (1А-5А; 6А-9А) и/или платформенных сегментов предложена структурированная, последовательная сборка, в соответствии с "принципом сборочной линии".
7. Устройство для транспортировки по п.1 или 6, отличающееся тем, что происходит одновременная сборка множества каркасов зданий или продукции, такой как целые изделия или полуфабрикаты, причем платформенные сегменты (5А8) для первого платформенного блока (M1, М3) и платформенные сегменты (9А4) для второго платформенного блока (6А-9А), посредством указанного первого средства перемещения, подвижно расположены в каждом из двух направлений, ориентированных противонаправлено друг другу.
8. Устройство для транспортировки по п.1, отличающееся тем, что первое направление перемещения (D1) посредством второго средства (М2) придается первому платформенному блоку (1А-5А) и/или платформенным сегментам, а второе противоположное направление перемещения (D2) посредством четвертого средства (М4) придается второму платформенному блоку (6А-9А) и/или платформенным сегментам, где первое средство перемещения (M1) приспособлено перемещать несколько платформенных сегментов (9А4) от первого ко второму, в качестве альтернативы, от второго к первому платформенному блоку, а третье средство перемещения (М3) приспособлено перемещать выбранное количество платформенных установок и/или платформенных сегментов (5А1-5А8), поддерживая целые изделия или полуфабрикаты, от второго к первому, в качестве альтернативы, от первого ко второму платформенному блоку и/или платформенным сегментам.
9. Устройство для транспортировки по п.8, отличающееся тем, что первое (M1), второе (М2), третье (М3) и/или четвертое (М4) средства включают один или более тянущих и/или толкающих брусьев или устройств из брусьев, которые заглублены в плоскую опорную поверхность для указанных поверхностей (55, 55а, 55b) скольжения.
10. Устройство для транспортировки по п.9, отличающееся тем, что указанным тянущим и/или толкающим брусьям (50, 51) придано U-образное поперечное сечение с центральным участком, взаимосвязывающим фрагменты поперечного сечения, образуя ряд ориентированных пазов, сформированных в качестве несущих приспособлений, таким образом, что каждый один из данных пазов (53а, 53b) будет в состоянии окружать и вызывать взаимодействие с расцепляющим и/или блокировочным средством (51а, 51b).
11. Устройство для транспортировки по п.1 или 10, отличающееся тем, что платформенные блоки (1А-5А; 6А-9А) и/или платформенные сегменты опираются своей нижней стороной на параллельно ориентированные несущие приспособления с пазами, причем каждое несущее приспособление предназначено быть в состоянии взаимодействовать со своим локализованным запирающим и/или блокировочным средством (51а, 51b).
12. Устройство для транспортировки по п.1, отличающееся тем, что каждое одно из первого (M1), второго (М2), третьего (М3) и/или четвертого (М4) средства или выбранное из них включает гидравлически или пневматически приводимое в действие устройство с поршневым цилиндром, ориентированное за пределами платформенных установок и/или платформенных сегментов для того, чтобы сообщать указанным толкающим и/или тянущим брусьям возвратно-поступательный характер перемещения.
13. Устройство для транспортировки по п.12, отличающееся тем, что блок управления приспособлен для того, чтобы выборочно и скоординировано во времени или обособленно во времени приводить в действие указанное устройство с поршневым цилиндром для того, чтобы перемещать платформенные блоки и/или отдельные платформенные сегменты в пределах бесконечного пути.
14. Устройство для транспортировки по п.13, отличающееся тем, что указанный блок управления расположен так, чтобы приводить в действие указанное устройство с поршневым цилиндром в соответствии с технологической последовательностью, управляемой посредством программы, включенной в компьютерный блок.
15. Устройство для транспортировки по п.1, отличающееся тем, что указанные параллельно ориентированные брусья (51) ориентированы так, чтобы пересекать параллельно ориентированные брусья (50).
16. Устройство для транспортировки, предназначенное для перемещения ряда скоординированных смоделированных платформенных блоков и/или платформенных сегментов по любому из предшествующих пунктов, где первое (M1; М3) и второе (М2, М4) средства приспособлены сообщать своему локализованному платформенному блоку и/или платформенным сегментам пошаговое смещающее движение, отличающееся тем, что указанный платформенный блок и/или платформенные сегменты приспособлены опираться на поверхности (55, 55а, 55b) скольжения, ориентированные в выбранном направлении перемещения, параллельно ориентированные тянущие и/или толкающие брусья (51), локализованные для четвертого средства (М4), ориентированы примыкающим образом и/или между указанными поверхностями (55а, 55b) скольжения, и тянущие и/или толкающие брусья (50, 51) являются перемещаемыми возвратно-поступательным способом и ориентированными под прямым углом (90°), при этом каждый один из данных брусьев должен находиться во взаимодействии со своим средством перемещения брусьев, таким как указанное первое средство (M1) и указанное четвертое средство (М4).
17. Устройство для транспортировки по п.1, отличающееся тем, что первое плечо (51), а также еще и другие первые плечи ориентированы параллельно, и являются, по существу, прямыми, но с U-образным участком (51”), для того, чтобы таким образом, быть в состоянии воздействовать и вызывать свободное возвратно-поступательное перемещение одного второго плеча (50), а также других вторых плеч в той же самой плоскости, что и указанное первое плечо (51).
| Комплект оборудования для сборки домов | 1960 |
|
SU138727A1 |
| DE 4141829 A1, 01.07.1993 | |||
| DE 3344034 A1, 13.06.1985 | |||
| ПОЛЕТНОЕ ТЕПЛОЕ НАТЕЛЬНОЕ БЕЛЬЕ ДЛЯ КОСМОНАВТА | 2007 |
|
RU2338445C1 |
| US 4272050 А, 09.06.1981 | |||
| US 3962773 А, 15.06.1976 | |||
| US 3820216 А, 28.06.1974. | |||

