Группа изобретений относится к области авиационного двигателестроения и может быть использована в электронно-гидромеханических системах автоматического управления многорежимными газотурбинными двигателями (ГТД) с форсажной камерой сгорания (ФКС).
Известен способ управления ГТД с ФКС, заключающийся в том, что по измеренным температуре воздуха на входе в ГТД, давлению воздуха за компрессором, положению рычага управления двигателем (РУД) и расходу топлива в основную камеру сгорания (ОКС) управляют расходом топлива в ФКС, по положению РУД и перепаду давлений на турбине формируют заданное положение створок критического сечения реактивного сопла (PC) ГТД, сравнивают его с измеренным положением створок PC и по величине рассогласования между заданным и измеренным значениями формируют управляющее воздействие на привод створок PC.
(см. Шляхтенко С.М. «Теория воздушно-реактивных двигателей», Москва, Машиностроение, 1975, с.305-308).
В результате анализа данного способа необходимо отметить, что для него характерны недостаточное быстродействие контура регулирования отношения давлений в заданных сечениях ГТД, а следовательно, весьма существенно отклонение параметров ГТД на переходных режимах, особенно при розжиге ФКС. Это, в свою очередь, приводит к снижению надежности работы ГТД и, как следствие, снижению безопасности полета летательного аппарата. Кроме этого, при запуске двигателя позиционирование PC приводит к большим отборам топлива от насоса, что снижает частоту авторотации ротора компрессора и давление за топливным насосом.
Известна система управления ГТД, содержащая два контура регулирования, первый из которых включает датчик частоты вращения, связанный с основным регулятором частоты вращения, выход которого связан с сервоприводом топливорегулирующего клапана. Данный контур также содержит задатчик основного регулятора. Второй контур регулирования осуществляет регулирование температуры газа перед турбиной и содержит датчик температуры, связанный с первым входом регулятора, второй вход которого связан с задатчиком предельной температуры. Система также содержит второй датчик частоты вращения, выход которого связан с первым входом дополнительного регулятора частоты вращения, второй вход которого связан с выходом нелинейного звена, связанным с выходом регулятора технологического параметра. Выходы регуляторов частоты вращения связаны с входами селектора, выход селектора соединен с первым входом сумматора, второй вход которого связан с датчиком обратной связи по положению топливорегулирующего органа (дозатора).
В процессе работы системы выходной сигнал регулятора, представляющий разность между выходным сигналом нелинейного звена и сигналом датчика частоты вращения, проходит через селектор (пока предельное значение температуры не достигнуто), поступает на сумматор, где суммируется с сигналом датчика обратной связи и поступает на вход задатчика, который управляет регулятором частоты вращения сервопривода. При достижении предельной температуры газа перед турбиной на селектор подается и сигнал с регулятора температуры, который подается на селектор, и сигнал частоты вращения, управляющий сигнал с селектора поступает на сумматор и далее на регулятор и управление топливорегулирующего клапана.
(см. а.с. СССР №591024, кл. F02C 9/00, 1979 г.).
В результате анализа известной системы управления ГТД необходимо отметить, что она осуществляет регулирование ГТД по двум параметрам - частоте вращения ротора и температуре газа перед турбиной. Однако данная система весьма сложна, обладает довольно большой инерционностью, что не позволяет эффективно использовать ее при работе ГТД на переходных предельных и форсажных режимах.
Известен способ отладки ГТД с ФКС, реализуемый системой, которая оснащена датчиком температуры (Тт) газов за турбиной, датчиком перепада давления газов на турбине (πт), автоматом управления (Fгф) по сигналу (πт), датчиком положения гидроцилиндров (ГЦ) сопла, автоматом подачи форсажного топлива с настроечным элементом.
Система также содержит пульт управления, связанный входами с поименованными выше датчиками. Пульт включает преобразователь сигналов, вычислитель, соединенный с преобразователем, элемент сравнения, связанный с выходами преобразователя и вычислителя.
При функционировании системы на вход преобразователя сигналов поступают сигналы с датчика температура (Тт) газов за турбиной и с датчика положения гидроцилиндров сопла. На выходе преобразователя сигналов формируется единый цифровой код сигналов датчиков, который поступает на вход вычислителя. Сигналы с выхода преобразователя сигналов поступают в вычислительное устройство для расчета потребного значения площади PC по формуле
 ,
,
где Fгф и Fгм - площади PC на форсажном и бесфорсажном режимах соответственно, Тт и Тфзад - замеренное и заданное значения температуры газа за турбиной. При отладке двухконтурных газотурбинных двигателей потребное значение площади PC определяют по формуле
 ,
,
где Т2т - температура газов за турбиной после смешения обоих потоков.
Сигнал с выхода вычислительного устройства, характеризующий заданную площадь PC, поступает на вход элемента сравнения, где формируется управляющий сигнал.
При работе ГТД в форсажном режиме на вход преобразователя сигналов поступают сигналы с датчика температуры газов сопла и датчика положения гидроцилиндров сопла. Преобразованный сигнал с выхода преобразователя сигналов поступает на вход элемента сравнения, где он сравнивается с расчетным значением (Fгф). На выходе элемента сравнения формируется сигнал ΔF, по которому меняется настройка блока подачи топлива за счет изменения положения настроечного элемента.
Команда для изменения настройки блока подается (в ручном или автоматическом режиме) до тех пор, пока проходная площадь PC не станет равной потребному значению Fгф(ΔF=0).
(см. патент РФ №2383001, МПК F01M 15/00. 2010 г.).
В результате анализа известной системы необходимо отметить, что она, как и приведенные выше, довольно инерционна, что не обеспечивает заданного качества регулирования на переходных и форсажных режимах работы ГТД.
Наиболее близким к данному изобретению по технической сущности и достигаемому техническому результату является способ управления ГТД с ФКС, согласно которому по измеренным температуре воздуха на входе в ГТД, давлению воздуха за компрессором, положению РУД и расходу топлива в ОКС управляют расходом топлива в ФКС, по положению РУД и перепаду давлений на турбине формируют заданное положение створок критического сечения PC ГТД, сравнивают его с измеренным положением створок PC и по величине рассогласования между заданным и измеренным значениями формируют управляющее воздействие на привод створок PC, причем дополнительно контролируют величину рассогласования между заданным и измеренным значениями положения створок PC, и, если рассогласование превышает наперед заданную величину, определяемую по результатам сдаточных испытаний ГТД, ограничивают темп изменения расхода топлива в ФКС.
Система для реализации способа содержит последовательно соединенные блок датчиков, задатчик форсажных режимов работы ГТД, первый сумматор, первый электрогидропреобразователь, дозатор форсажного топлива, второй вход сумматора подключен к блоку датчиков. Система также содержит последовательно соединенные второй задатчик положения PC, второй сумматор, второй электрогидропреобразователь, золотник управления гидроцилиндрами привода PC, при этом второй задатчик и второй вход сумматора подключены к блоку датчиков, выход второго сумматора подключен к первому задатчику.
В процессе работы системы по измеренным с помощью блока датчиков температуре воздуха на входе в ГТД, давлению воздуха за компрессором, положению РУД и расходу топлива в ОКС первый задатчик формирует заданное положение дозатора, которое в сумматоре сравнивается с фактическим положением, измеренным с помощью блока датчиков. По величине рассогласования, поступающей в первый электрогидропреобразователь, формируется управляющее воздействие на дозатор, в соответствии с которым регулируется расход топлива в ФКС.
Параллельно, по измеренным с помощью блока датчиков положению РУД и перепаду давлений на турбине, второй задатчик формирует заданное положение створок PC.
Сигнал заданного положения створок PC поступает во второй сумматор, где сравнивается с измеренным блоком датчиков положением и по величине рассогласования между заданным и измеренным значениями второй электрогидропреобразователь осуществляет управление гидроцилиндрами привода створок PC посредством перемещения золотника в соответствующее положение.
При исправных элементах контура управления PC (второго электрогидропреобразователя, золотника) фактическое положение створок PC отличается от заданного практически только на динамических режимах, а учитывая, что заданное положение створок PC изменяется достаточно плавно, величина рассогласования между заданным и фактическим положениями в динамически отлаженной системе не превышает конкретной величины допуска, заложенного в систему управления ГТД. Однако в эксплуатации возникают ситуации, когда величина рассогласования в отдельные моменты может превышать эту величину (например, при «затираниях» гидроцилиндров привода PC, в момент резкого увеличения потребного расхода топлива, когда инерционность топливного насоса не позволяет мгновенно увеличить располагаемый расход и т.д.). При этом возникает дисбаланс между расходом воздуха через газовоздушный тракт (ГВТ) ГТД и расходом топлива в ФКС. Чтобы избежать этого, величина рассогласования между заданным и фактическим положениями створок PC с выхода второго сумматора подается в первый задатчик, который при превышении наперед заданной величины, определяемой при сдаточных испытаниях ГТД, ограничивает темп изменения расхода форсажного топлива.
(см. патент РФ №2387857, кл. F02C 9/28, 2010 г.) - наиболее близкий аналог для способа и системы.
В результате анализа данных способа и системы необходимо отметить, что они обеспечивают баланс между расходом воздуха через ГВТ ГТД и расходом топлива в ФКС. Однако известные способ и система не учитывают различные требования, предъявляемые к степени расширения газов на турбине при разных режимах работы ГТД, им присущи недостаточное быстродействие, а парирование отклонений параметров газогенератора (ГГ) от установившихся при розжиге ФКС происходит за счет ограничения темпа изменения расхода топлива в ФКС, а следовательно, за счет увеличения времени форсажной приемистости.
Техническим результатом заявленной группы изобретений является повышение надежности и безопасности работы ГТД с ФКС летательного аппарата (ЛА) за счет уменьшения времени форсажной и полной приемистости ГТД и расширения области надежного запуска ФКС, а также обеспечения работы ГТД в широком диапазоне на оптимальных режимах.
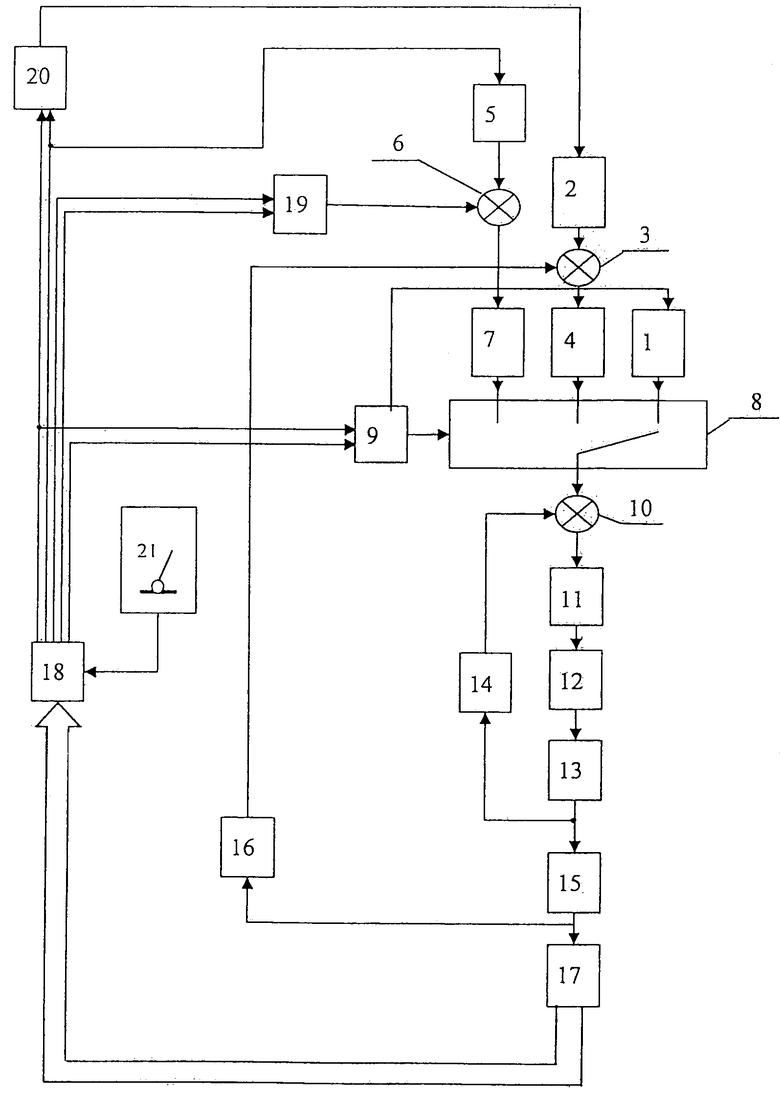
Сущность заявленной группы изобретений поясняется чертежами, на которых представлена схема системы управления ГТД с ФКС.
Система содержит первый задатчик 1 формирования заданного значения положения распределительного золотника, второй задатчик 2 формирования заданного значения положения ГЦ PC, выход задатчика 2 связан с первым входом первого элемента сравнения 3, выход которого связан с регулятором 4 положения ГЦ PC.
Конструктивно регулятор 4 может представлять собой усилитель.
Система оснащена третьим задатчиком 5 формирования заданного значения степени расширения газов на турбине, выход которого связан с первым входом второго элемента сравнения 6, выход второго элемента сравнения 6 связан с первым входом регулятора 7 степени расширения газов на турбине.
Конструктивно регулятор 7 может представлять собой усилитель.
Выходы первого задатчика 1, регулятора 4 и регулятора 7 связаны с входами переключателя 8 режимов управления PC, с входом которого также связан первый выход логического блока 9 формирования команды на выбор режима управления PC. В качестве переключателя 8 может быть использован стандартный мультиплексор. Логический блок выполнен известным образом, в частности, может быть реализован на компараторах, логических элементах И, ИЛИ.
Система также содержит третий элемент сравнения 10, первый вход которого связан с выходом переключателя 8, а выход - через последовательно соединенные усилитель 11 и электрогидроусилитель (ЭГУ) 12 - с распределительным золотником 13, управляющим положением ГЦ PC. Для комплектации системы в качестве ЭГУ используется серийно выпускаемый агрегат.
Положение золотника 13 отслеживается датчиком 14, связанным со вторым входом третьего элемента сравнения 10. Золотник 13 гидравлически связан с гидроцилиндрами 15, управляющими критическим сечением PC, положение рабочего элемента (штока) которых отслеживается датчиками 16 положения ГЦ PC, связанными со вторым входом первого элемента сравнения 3.
ГТД обозначен позицией 18, а значения его параметров в процессе работы отслеживаются датчиками, условно представленными на чертеже в виде блока 18. Для управления площадью PC используются показания следующих датчиков: давления за компрессором - (Рк); давления за турбиной - (Рт); частоты вращения ротора турбокомпрессора - (nТК); температуры воздуха на входе в ГТД - (Твх), положения ручки управления двигателем (РУД) (αруд). РУД обозначен позицией 21.
Выходы датчиков (Рк) и (Рт) соединены с входами делителя 19, выход которого связан со вторым входом второго элемента сравнения 6. В качестве делителя 19 в системе может быть использовано стандартное арифметическое устройство.
Выходы датчиков nТК и Твх связаны с входами блока 20 вычисления приведенной частоты вращения ротора турбокомпрессора (nTKпр,), выход которого связан с входом второго задатчика 2.
Выход датчика Твх также связан с входом третьего задатчика 5.
Выходы датчиков nTK и αруд связаны с входами логического блока 9, второй выход которого соединен со входом задатчика 1.
Система укомплектована стандартными датчиками, которые используются по прямому назначению.
В качестве первого задатчика может быть использовано стандартное устройство, выдающее на выходе постоянный сигнал.
В качестве второго и третьего задатчиков могут быть использованы известные матричные устройства реализации произвольных функциональных зависимостей.
Выполнение блоков, узлов и агрегатов системы, не приведенное в настоящей заявке, является известным и не составляет предмета патентной охраны.
Способ управления ГТД с ФКС, с использованием приведенной выше системы управления, осуществляют следующим образом.
Работу системы при осуществлении способа рассмотрим на следующих режимах: запуск ГТД, дроссельные режимы работы ГТД, максимальные бесфорсажные и форсажные режимы работы, останов ГТД.
Запуск ГТД осуществляют переводом в РУД 21 на площадку малого газа (МГ) или выше. При этом раскручивается ротор ТК. Значения положения РУД и частоты вращения ТК соответствующими датчиками передаются на вход логического блока 9. Блок 9 формирует управляющий сигнал на вход переключателя 8 при выполнении следующих условий: РУД на площадке МГ или выше (αруд=αРУДмг) И частота вращения ТК ниже частоты вращения ТК на режиме МГ (nТК<nTKмг). По этому сигналу переключатель 8 (если не был переведен ранее) переводится в положение, при котором с первым входом третьего элемента сравнения 10 соединен выход первого задатчика 1, на вход которого поступает управляющий сигнал с второго выхода логического блока 9. В результате сформированный в задатчике 1 управляющий сигнал, усиленный усилителем 11, передается на ЭГУ 12, который перемещает распределительный золотник 13 в нейтральное положение.
Необходимо отметить, что задатчик 1 формирует заданное постоянное значение положения распределительного золотника 13 PC (LzCONSTнейтраль), в результате чего золотник устанавливается в нейтральное положение, которое является постоянным, что позволяет обеспечить минимальные утечки топлива через агрегат управления PC. Заданное постоянное значение положения распределительного золотника 13 PC рассчитывается известным образом по параметрам агрегата позиционирования створок PC.
При перемещении РУД выше площадки МГ частота вращения ТК увеличивается и ГТД выходит на дроссельные режимы работы. По измерениям датчиков (nТК и αРУД), в соответствии с условиями «РУД выше площадки МГ и ниже площадки МАКС» (максимального режима работы ГТД) И «частота вращения ТК выше частоты вращения ТК на режиме МГ И ниже частоты вращения ТК на режиме МАКС» (αРУДмг=αРУД<αРУДмакс И nTKмг=nТК<nTKмакс) логический блок 9 формирует команду на переключение переключателя 8 в положение, при котором с входом третьего элемента сравнения 10 связан выход регулятора 4. На данных режимах выполняется программа позиционирования ГЦ PC для поддержания требуемой площади критического сечения PC в зависимости от приведенной частоты вращения ротора компрессора низкого давления. Параллельно, значение с датчиков (nТК, Твх) поступает на вход блока 20, в котором вычисляется приведенное значение параметра (nTKпр) по зависимости:
Блок 20 может быть реализован на матричном устройстве реализации произвольных функциональных зависимостей.
Полученное в блоке 20 значение (nTKпр) поступает на вход задатчика 2, в котором формируется программа заданного положения ГЦ PC по зависимости ГЦпос=f(nTKпр). Заданное значение положения ГЦ PC поступает на первый вход первого элемента сравнения 3, на второй вход которого поступает измеренное датчиком 16 положение ГЦ 15 PC.
На элементе сравнения 3 сравнивается заданное значение положения ГЦ PC с выхода задатчика 2 с фактическим значением положения ГЦ 15 PC. Выходом элемента сравнения 3 является величина рассогласования, которая поступает на вход регулятора 4. В соответствии с величиной рассогласования регулятор 4 пропорционально формирует заданное значение положения золотника 13, которое поступает на первый вход третьего элемента сравнения 10, где сравнивается с действительным на данный момент положением золотника и полученный в результате сравнения управляющий сигнал, усиленный усилителем 11, поступает на ЭГУ 12, который перемещает в заданное положение распределительный золотник 13, соответствующим образом осуществляющий управление ГЦ 15 PC.
При перемещении РУД из области дроссельных режимов на площадку МАКС частота вращения ТК достигает своего максимального значения и ГТД выходит на максимальный режим работы. При перемещении РУД выше площадки МАКС следует розжиг форсажной камеры сгорания (ФКС) и ГТД выходит на форсажный режим работы.
Логический блок 9 анализирует показания датчиков (nTK и αРУД) и, в соответствии с условиями «РУД на площадке МАКС или выше» И «частота вращения ТК равна частоте вращения ТК на режиме МАКС» (αРУД=αРУДмакс И nТК=nTKмакс), выдает на переключатель 8 управляющий сигнал, в соответствии с которым переключатель 8 переводится в положение, при котором с первым входом третьего элемента сравнения 10 соединяется выход регулятора 7.
Третий задатчик 5 по измеряемому параметру Твх формирует заданное значение степени расширения газов на турбине. При этом используется зависимость πT=f(Твх).
По измеренным датчиками 18 значениям давления Рк и Рт делитель 19 формирует текущее значение степени расширения газов на турбинах, как отношение Рк к Рт. Элемент сравнения 6 сравнивает заданное значение и фактическое значения πт, и по величине ошибки, полученной в результате сравнения, регулятор 7 пропорционально формирует заданное значение положения распределительного золотника 13.
Таким образом, на данных режимах работы поддерживается заданное отношение давления в выбранных сечениях двигателя (например, отношение давления за ТК к давлению за турбиной - степень расширения газов на турбине).
При перемещении РУД ниже площадки МАКС частота вращения ТК снижается и ГТД переходит на дроссельные режимы работы.
По измерениям датчиков (nTK и αруд), при выполнении условий αРУДмг=αРУД<αРУДмакс И nTKмг=nтк<nTKмакс), блок 9 формирует команду на переключение переключателя 8. Переключатель 8 переводится в положение, при котором с входом третьего элемента сравнения 10 связан выход регулятора 4. На данных режимах снова выполняется программа позиционирования ГЦ PC для поддержания требуемой площади критического сечения PC в зависимости от приведенной частоты вращения ротора компрессора низкого давления.
При перемещении РУД ниже площадки МГ осуществляется останов двигателя, при этом частота вращения ТК опускается ниже частоты вращения ТК на режиме МГ.
На режиме останова ГТД при выполнении условий РУД ниже площадки МГ и частоте вращения ТК ниже частоты вращения ТК на режиме МГ (αРУД<αРУДмг И nТК<nTKмг) логический блок 9 подает команду на задатчик 1, для изменения заданного положения золотника (LzCONSTнейтраль) на положение, при котором в силовые ГЦ 15 подается расход на раскрытие PC (LzCONSTраскрытие). Логический блок 9 также переключает переключатель 8 в положение, при котором с первым входом элемента сравнения 10 связан задатчик 1. Во время выбега роторов ТК топливный насос продолжает работать и ГЦ 15 перекладывают PC в положение полного раскрытия. После останова ГТД это положение сохраняется до следующего его запуска. Раскрытое сопло на остановленном ГТД облегчает осмотр ФКС при техническом обслуживании ГТД.
Один контур регулирования не обеспечивает требования к регулированию PC ГТД на всех режимах работы.
На запуске ГТД необходимо обеспечить минимальные утечки через агрегат позиционирования ГЦ PC и разгрузить топливный насос и вал турбокомпрессора, для этого следует позиционировать распределительный золотник в нейтральном положении все время запуска.
Для обеспечения требуемого качества управления PC, минимизации влияния возмущений, оказываемых на параметры ГГ при изменении степени форсирования ГТД, обеспечения запасов газодинамической устойчивости компрессора и получения заданной тяги ГТД целесообразно использование контура управления степенью расширения газов на турбине. Однако использование данного контура на дроссельных режимах работы ГТД при докритических перепадах давления на PC не обеспечивает требуемой точности регулирования. Поэтому на дроссельных режимах работы необходимо использовать контур поддержания заданной площади PC.
Для удобства технического обслуживания ГТД (например, осмотра форсажной камеры) необходимо полностью раскрытое сопло на остановленном ГТД. Для выполнения данного требования используется контур позиционирования золотника в заданное положение.
Таким образом, управление ГТД с ФКС осуществляется по одному из трех контуров управления, на каждом из контуров задается индивидуальная программа управления, которая корректируется по определенной группе датчиков, показания которых наиболее значимы для работы именно в данном режиме. Это позволяет существенно упростить процесс управления работой ГТД и в то же время сделать его более эффективным.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2634997C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ | 2018 |
|
RU2705500C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ | 2018 |
|
RU2706518C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2631974C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2652267C2 |
| Способ управления газотурбинным двигателем с форсажной камерой сгорания | 2022 |
|
RU2781460C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ | 2014 |
|
RU2555784C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ | 2008 |
|
RU2387857C2 |
| Способ управления газотурбинным двигателем с форсажной камерой сгорания | 2021 |
|
RU2774566C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ | 2009 |
|
RU2432478C2 |
Группа изобретений относится к области авиационного двигателестроения. Управление газотурбинным двигателем (ГТД) с форсажной камерой сгорания (ФКС) осуществляется по одному из трех контуров управления, на каждом из контуров задается индивидуальная программа управления, которая корректируется по определенной группе датчиков, показания которых наиболее значимы для работы именно в данном режиме. Изобретение позволяет повысить надежность и безопасности работы ГТД с ФКС летательного аппарата за счет уменьшения времени форсажной и полной приемистости ГТД и расширения области надежного запуска ФКС, а также обеспечения работы ГТД в широком диапазоне на оптимальных режимах. 2 н.п. ф-лы, 1 ил.
1. Способ управления газотурбинным двигателем с форсажной камерой сгорания, заключающийся в том, что в процессе работы двигателя посредством датчиков измеряют параметры работы двигателя, сравнивают их с заданными и по величине рассогласования управляют положением распределительного золотника, управляющего гидроцилиндрами, регулирующими положение створок критического сечения реактивного сопла двигателя, отличающийся тем, что при запуске двигателя распределительный золотник перемещают в нейтральное положение, на дроссельных режимах работы двигателя определяют приведенную частоту вращения ротора турбокомпрессора и положение гидроцилиндра реактивного сопла и по результатам сравнения данных сигналов получают управляющий сигнал, в соответствии с которым регулируют положение распределительного золотника для поддержания заданной площади реактивного сопла, на максимальных бесфорсажных и форсажных режимах по измеренным значениям давления в двух заданных сечениях двигателя формируют текущее значение отношения давлений в этих сечениях, которое сравнивают с заданным значением и по величине ошибки, полученной в результате сравнения, формируют заданное значение положения распределительного золотника, а при останове двигателя распределительный золотник перемещают в положение для полного раскрытия реактивного сопла.
2. Система управления газотурбинным двигателем с форсажной камерой сгорания, содержащая задатчик, элемент сравнения, регулятор положения гидроцилиндров реактивного сопла, последовательно соединенные электрогидравлический преобразователь и распределительный золотник управления гидроцилиндрами реактивного сопла с датчиком положения гидроцилиндра реактивного сопла и датчиками двигательных параметров: частоты вращения ротора турбокомпрессора, температуры на входе в двигатель, давлений в двух сечениях двигателя и датчиком положения ручки управления двигателем, отличающаяся тем, что система снабжена датчиком положения распределительного золотника реактивного сопла, вторым и третьим задатчиком, вторым и третьим элементами сравнения, усилителем, логическим блоком, переключателем, делителем, регулятором отношения давлений в двух сечениях двигателя, блоком вычисления приведенной частоты вращения ротора турбокомпрессора, первый и второй входы которого связаны с датчиками температуры на входе в двигатель и частоты вращения ротора турбокомпрессора, соответственно, а выход связан с первым задатчиком, выход которого связан с первым входом первого элемента сравнения, второй вход которого связан с датчиком положения гидроцилиндра реактивного сопла, а выход с регулятором положения гидроцилиндров реактивного сопла, вход второго задатчика связан с датчиком температуры на входе в двигатель, а выход связан с первым входом второго элемента сравнения, второй вход которого связан с выходом делителя, а выход связан со входом регулятора отношения давлений в двух сечениях двигателя, со входом третьего задатчика связан второй выход логического блока, при этом выходы третьего задатчика, регулятора положения гидроцилиндров реактивного сопла, регулятора отношений давлений в двух сечениях двигателя и первый выход логического блока связаны со входами переключателя, выход которого связан с первым входом третьего элемента сравнения, второй вход которого соединен с датчиком положения распределительного золотника, а выход - через усилитель с последовательно соединенными электрогидроусилителем и распределительным золотником, управляющим положением гидроцилиндров реактивного сопла, при этом входы логического блока соединены с датчиками положения рычага управления двигателем и частоты вращения ротора турбокомпрессора, а входы делителя - с датчиками давления в двух заданных сечениях двигателя.
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ С ФОРСАЖНОЙ КАМЕРОЙ СГОРАНИЯ | 2008 |
|
RU2387857C2 |
| СПОСОБ ОТЛАДКИ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ С ФОРСАЖНОЙ КАМЕРОЙ | 2008 |
|
RU2383001C1 |
| Система управления газотурбинным приводом | 1976 |
|
SU591024A1 |
| СПОСОБ ПОДБОРА ПОВЕРХНОСТИ СКОЛЬЖЕНИЯ СПОРТИВНОГО ИНВЕНТАРЯ | 2000 |
|
RU2176538C1 |
| US 4719750 A, 19.01.1988 | |||
| US 4370854 A, 01.02.1983. | |||

