Область техники
Настоящее изобретение относится к подавлению помех и, в частности, к динамической фильтрации для подавления Помех от Смежных Каналов (Adjacent Channel Interference, ACI).
Уровень техники
Согласно многим спецификациям систем связи требуется модем, обеспечивающий достаточный уровень производительности подавления ACI. По мере возрастающей плотности внедрения сетей связи требуемый уровень производительности ACI повышается. Согласно некоторым подходам для реализации подавления ACI в модеме используются статические фильтры, которые либо гасят слишком малую часть помех, либо подавляют часть полезного сигнала.
Раскрытие изобретения
Настоящее изобретение решает вышеизложенные проблемы путем предоставления подхода динамической фильтрации при подавлении ACI. Динамический подход обеспечивает возможность оптимального подавления помех при минимальном уровне нежелательного подавления полезного сигнала.
Согласно одному аспекту настоящей технологии способ подавления ACI содержит этапы, на которых принимают составной сигнал, включающий в себя полезный сигнал и возможные источники помех от одного или более смежных каналов, измеряют полезный сигнал и возможные источники помех от одного или более смежных каналов и регулируют местоположение (полосу пропускания и позицию), по меньшей мере, одного динамического фильтра, чтобы извлечь полезный сигнал.
Согласно еще одному аспекту настоящей технологии устройство приемника содержит антенну, сконфигурированную, чтобы принимать составной сигнал, включающий в себя полезный сигнал и возможные источники помех от одного или более смежных каналов, схему измерения помех, сконфигурированную, чтобы измерять полезный сигнал и возможные источники помех от одного или более смежных каналов, по меньшей мере, один динамический фильтр, сконфигурированный, чтобы извлекать полезный сигнал, и процессор, сконфигурированный, чтобы регулировать местоположение, по меньшей мере, одного динамического фильтра, чтобы извлечь упомянутый полезный сигнал.
Согласно еще одному аспекту настоящей технологии устройство приемника содержит средство приема для приема составного сигнала, включающего в себя полезный сигнал и возможные источники помех от одного или более смежных каналов, средство измерения для измерения полезного сигнала и возможных источников помех от одного или более смежных каналов, средство динамической фильтрации для регулирования местоположения, по меньшей мере, одного динамического фильтра, чтобы извлечь упомянутый полезный сигнал.
Согласно еще одному аспекту настоящей технологии машиночитаемое средство содержит инструкции для подавления ACI. Эти инструкции содержат код для приема составного сигнала, включающего в себя полезный сигнал и возможные источники помех от одного или более смежных каналов, для измерения полезного сигнала и возможных источников помех от одного или более смежных каналов и для регулирования местоположения, по меньшей мере, одного динамического фильтра, чтобы извлечь упомянутый полезный сигнал.
Согласно еще одному аспекту настоящей технологии процессор для подавления ACI сконфигурирован, чтобы измерять в составном сигнале полезный сигнал и возможные источники помех от одного или более смежных каналов и регулировать местоположение, по меньшей мере, одного динамического фильтра, чтобы извлечь упомянутый полезный сигнал.
При изучении следующего подробного описания, в котором в качестве иллюстрации показаны и описаны различные аспекты настоящей технологии, специалистам в данной области техники будут очевидны другие возможные аспекты настоящей технологии. Очевидно, что в рамках объема настоящего изобретения данная технология может быть реализована в других аспектах, и ее отдельные элементы могут быть модифицированы различными способами. Соответственно, следующие чертежи и подробное описание следует интерпретировать как иллюстративные, а не как ограничивающие.
Краткое описание чертежей
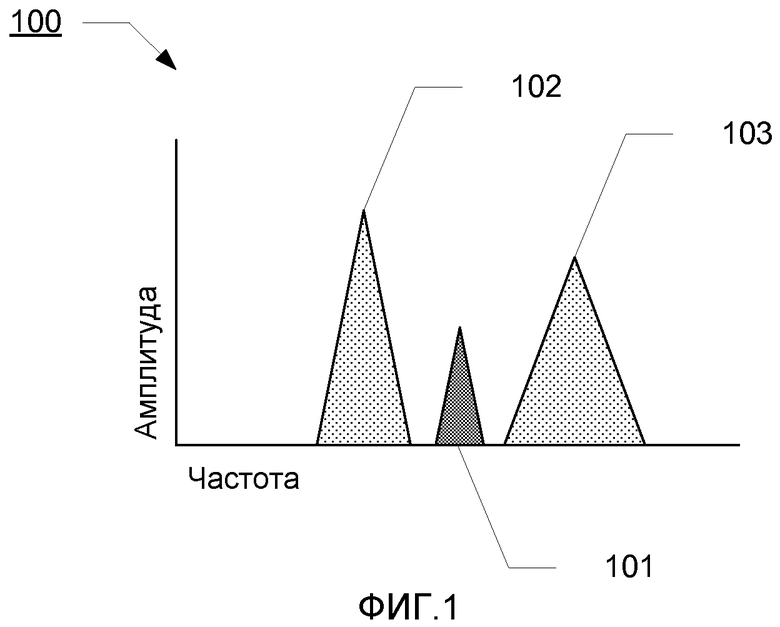
Фиг.1 - иллюстрация примера составного сигнала, включающего в себя полезный сигнал и источники помех от двух смежных каналов, согласно одному аспекту настоящей технологии;
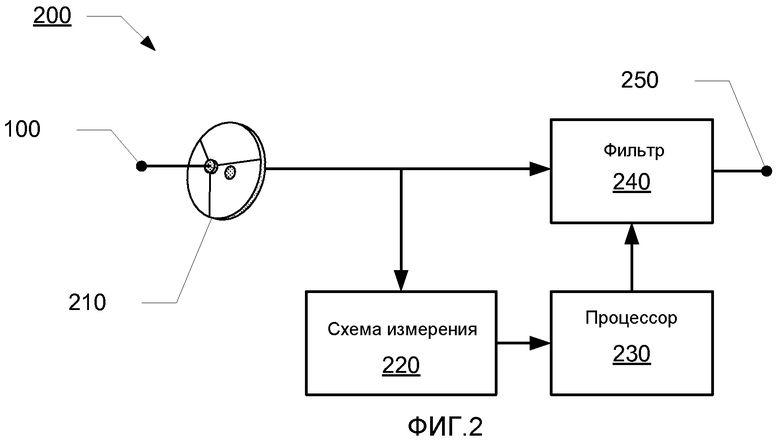
Фиг.2 - структурная схема, иллюстрирующая устройство приемника согласно одному аспекту настоящей технологии;
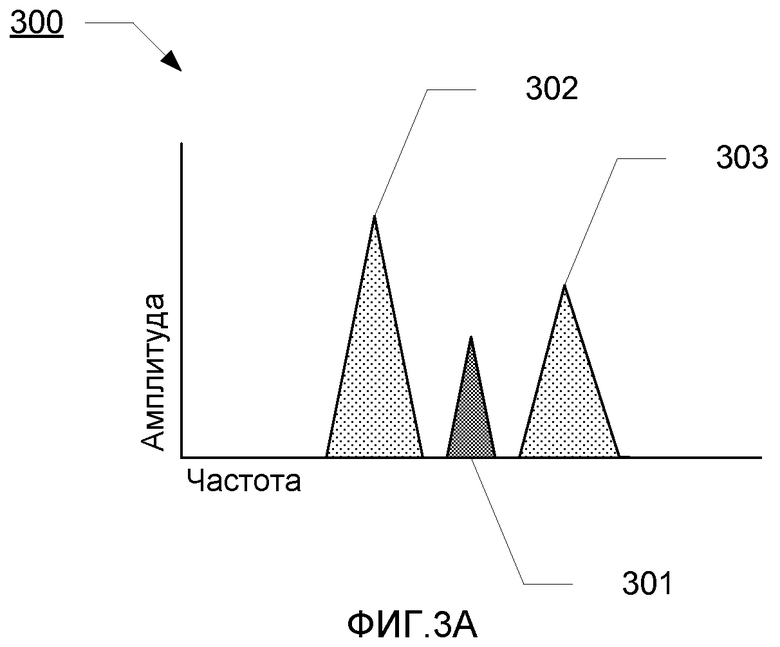
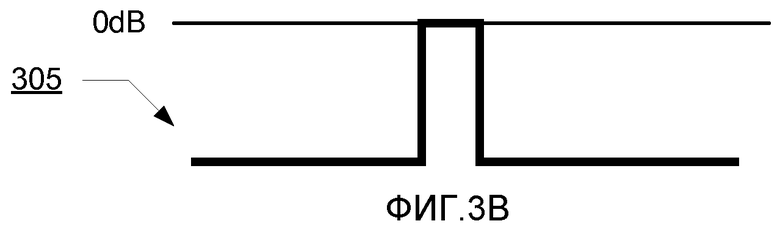
Фиг.3A, 3B и 3C - графические иллюстрации подавления ACI согласно одному аспекту настоящей технологии;
Фиг.4 - структурная схема, иллюстрирующая устройство приемника согласно одному аспекту настоящей технологии;
Фиг.5A и 5B - графические иллюстрации подавления ACI согласно одному аспекту настоящей технологии;
Фиг.6 - схема последовательности операций, иллюстрирующая способ подавления ACI согласно одному аспекту настоящей технологии;
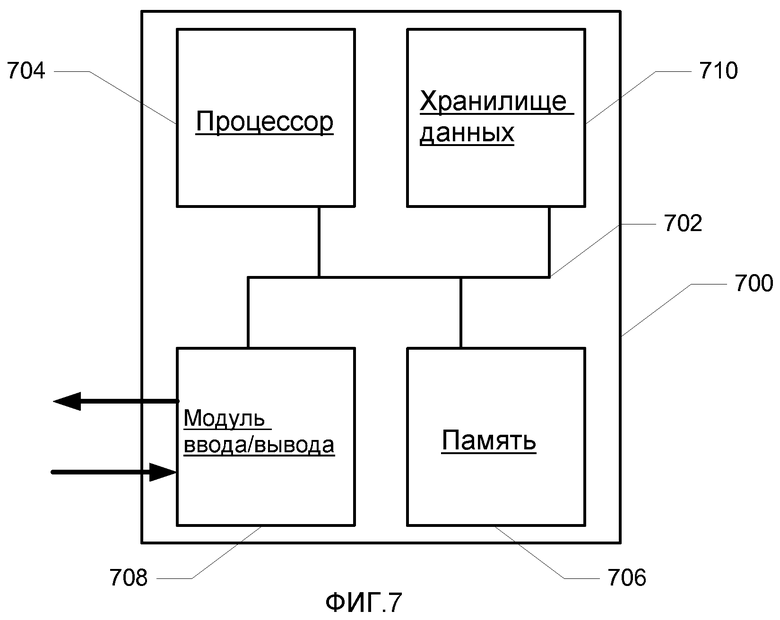
Фиг.7 - структурная схема, иллюстрирующая компьютерную систему, посредством которой могут быть реализованы определенные аспекты настоящей технологии.
Осуществление изобретения
Фиг.1 представляет собой иллюстрацию примера принимаемого сигнала согласно одному аспекту настоящей технологии. Составной сигнал 100 включает в себя полезный сигнал 101 и источники помех 102 и 103 от двух смежных каналов. Каждый из источников помех 102 и 103 от смежных каналов имеет полосу пропускания (представленную шириной помехи вдоль горизонтальной оси частот) и позицию (например, частоту, на которой располагается центр этого источника помех).
Некоторые приемники могут быть снабжены статическими фильтрами для подавления источников помех, таких как источники помех 102 и 103 от смежных каналов. Тем не менее, при использовании статических фильтров иногда подавляется слишком малая или слишком большая часть полосы пропускания (например, помехи полностью не подавляются, или подавляется некоторая часть полезного сигнала). В добавление, окружение, в котором имеют место источники помех, может динамически изменяться, так что статический фильтр только в исключительных случаях будет оптимально фильтровать принятый сигнал.
Согласно одному аспекту настоящей технологии устройство приемника, такое как показанное на Фиг.2, обеспечивает усовершенствованное подавление ACI. Устройство 200 приемника включает в себя антенну 210, сконфигурированную, чтобы принимать составной сигнал 100 и чтобы предоставлять составной сигнал 100 в схему 220 измерения. Согласно еще одному аспекту настоящего раскрытия схема 220 измерения измеряет мощность и/или местоположение полезного сигнала 101 и источников помех 102 и 103 от смежных каналов и предоставляет информацию об измерении в процессор 230. Процессор 230 принимает эту информацию и генерирует инструкции для регулирования динамического фильтра 240, чтобы соответствовать местоположению измеряемых источников помех смежных каналов.
Согласно одному аспекту настоящей технологии динамический фильтр 240 может представлять собой полосовой фильтр. При такой конфигурации динамический фильтр 240 может регулироваться согласно местоположению полезного сигнала 101 (то есть, чтобы пропускать только частоты полезного сигнала). Такая конфигурация более подробно проиллюстрирована на Фиг.3A-3C.
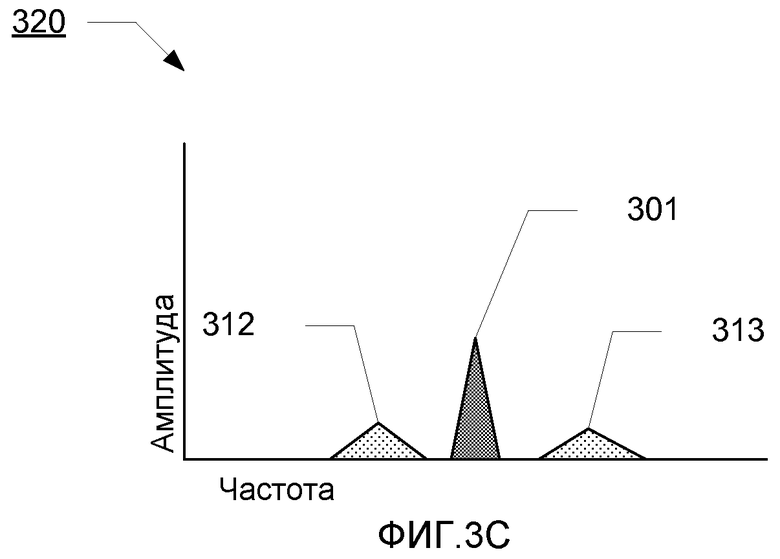
На Фиг.3A-3C проиллюстрирована производительность динамического полосового фильтра согласно определенным аспектам настоящего раскрытия. Фиг.3A иллюстрирует составной сигнал 300 до фильтрации. Составной сигнал 300 включает в себя полезный сигнал 301 и источники помех 302 и 303 от двух смежных каналов. Соответственно, после измерения мощности и местоположения полезного сигнала и источников помех от двух смежных каналов процессор конфигурирует динамический полосовой фильтр 305 таким образом, чтобы пропускать только частоты, соответствующие полезному сигналу 301. Остальные частоты, включая частоты источников помех 302 и 305, подавляются полосовым фильтром 305. Результат этого подавления проиллюстрирован на Фиг.3C. В отфильтрованном сигнале 320 подавленные помехи (источники помех) 312 и 313 имеют гораздо меньшую амплитуду, в результате чего существенно повышается Отношение Сигнала к Шуму (Signal-to-Interference Ratio, SIR) отфильтрованного сигнала 320.
Согласно еще одному аспекту настоящей технологии динамический фильтр 240 может представлять собой узкополосный режекторный фильтр. При такой конфигурации динамический узкополосный режекторный фильтр 240 может быть отрегулирован, чтобы его рабочий диапазон соответствовал местоположению источников помех.
Хотя динамический фильтр 240 показан как единый элемент уровня блока, когда динамический фильтр 240 представляет собой узкополосный режекторный фильтр, он может содержать множество динамических узкополосных режекторных фильтров согласно различным аспектам. Например, для такого сигнала, как сигнал 100, может быть желательным иметь два динамических узкополосных режекторных фильтра - один для подавления источников помех 102 и один для подавления источников помех 103. В одном аспекте, в котором количество источников помех от смежных каналов больше количества доступных динамических узкополосных режекторных фильтров, процессор 230 может быть сконфигурирован, чтобы выбирать, какие источники помех должны подавляться, а какие источники помех не должны подавляться, чтобы достичь наилучшего возможного SIR. Альтернативно, узкополосный режекторный фильтр может быть сконфигурирован, чтобы иметь достаточно широкую полосу пропускания и чтобы подавлять множество источников помех (при условии, что между этими помехами не будет полезного сигнала).
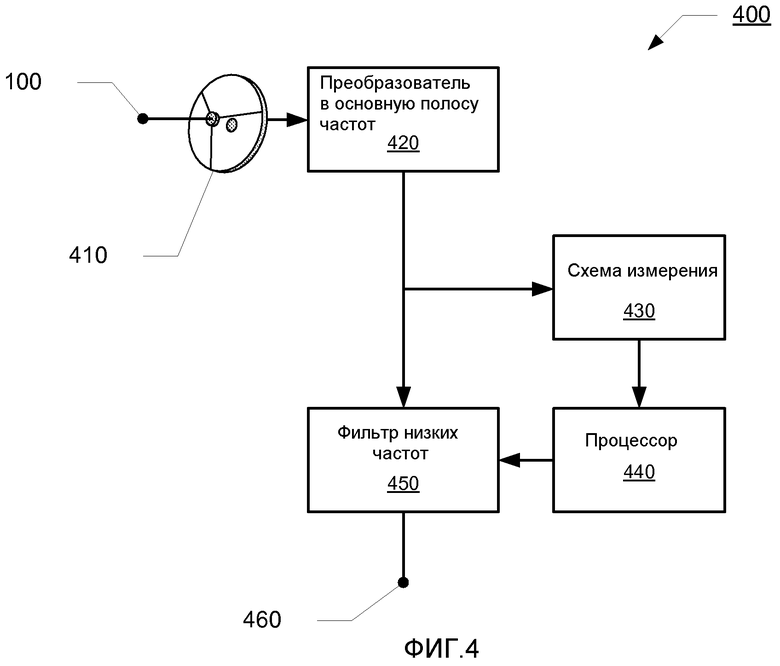
Согласно еще одному аспекту настоящей технологии динамический фильтр может представлять собой фильтр низких частот. Подобная конфигурация может использоваться в устройстве приемника, в котором фильтрация происходит после преобразования полосы частот модулирующих сигналов. Фиг.4 представляет собой иллюстрацию одного такого устройства приемника согласно одному аспекту настоящей технологии. Схема 430 измерения измеряет мощность и местоположение полезного сигнала 101 и источников помех 102 и 103 от смежных каналов после их преобразования в основную полосу частот и предоставляет информацию об измерении в процессор 440. Процессор 440 принимает эту информацию и генерирует в ответ инструкции для регулирования фильтра 450 низких частот, чтобы обеспечить соответствие относительной мощности и местоположению измеренного полезного сигнала.
Согласно одному аспекту настоящей технологии схема 430 измерения может быть сконфигурирована, чтобы измерять только мощность полезного сигнала и мощность источников помех 102 и 103 смежных каналов. В одном аспекте процессор 440 сконфигурирован, чтобы регулировать фильтр 450 низких частот, соответствующий относительной мощности полезного сигнала, относительно источников помех 102 и 103 смежных каналов. Так, если одни детектированные ACI имеют высокую мощность, полоса пропускания фильтра 450 низких частот сокращается на той стороне полезного сигнала, на которой присутствуют более мощные ACI.
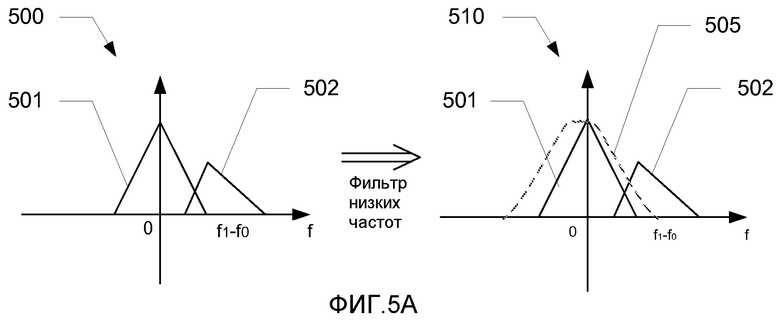
На Фиг.5A и 5B проиллюстрирована производительность динамического фильтра низких частот согласно определенным аспектам настоящего раскрытия. Фиг.5A иллюстрирует принятый сигнал до 500 и после 510 прохождения через фильтр низких частот. Принятый сигнал 500 включает в себя полезный сигнал 501 и источники помех 502 смежного канала. Соответственно, после измерения мощности и местоположения полезного сигнала 501 и ACI 502 процессор конфигурирует динамический фильтр 505 низких частот, чтобы извлечь полезный сигнал 501. Фильтр 505 низких частот конфигурируется, чтобы на правой стороне фильтра обеспечивалось усиленное подавление, так что фильтр 505 центрируется на отрицательной частоте.
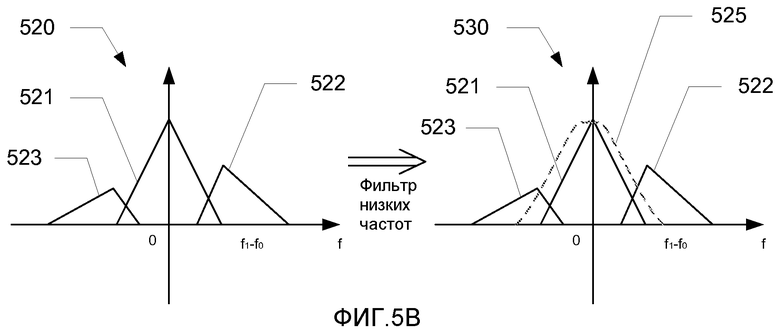
Фиг.5B иллюстрирует принятый сигнал до 520 и после 530 прохождения через фильтр низких частот. Принятый сигнал 520 включает в себя полезный сигнал 521 и источники помех 522 и 523 двух смежных каналов. ACI 521 мощнее, чем ACI 523. Соответственно, после измерения мощности и местоположения полезного сигнала 521 и ACI 522 и 532 процессор конфигурирует динамический фильтр 525 низких частот, чтобы извлечь полезный сигнал 521. Фильтр 525 низких частот конфигурируется, чтобы на обеих сторонах обеспечивалось сильное подавление, но чтобы на правой стороне было более сильное подавление. В результате фильтр 525 центрируется на отрицательной частоте.
Согласно одному аспекту настоящей технологии алгоритм измерения мощности ACI оценивает уровень P center мощности сигнала и уровни P right и P left мощности ACI посредством фильтров, отцентрированных на частотах ƒcenter , ƒright , ƒleft Гц с полосой пропускания BW Det величиной 3 дБ. Тогда, подавление ACI посредством фильтра низких частот может выполняться по следующей логике:
если (P center /P right <Пороговой Величины и P center /P left >Пороговой Величины){
Пропустить принятый сигнал через фильтр низких частот с сокращенной полосой пропускания в 3 дБ на стороне более высокой частоты;
}
в противном случае, если (P center /P right >Пороговой Величины и P center /P left <Пороговой Величины){
Пропустить принятый сигнал через фильтр низких частот с сокращенной полосой пропускания в 3 дБ на стороне более низкой частоты;
}
в противном случае, если (P center /P right <Пороговой Величины и P center /P left <Пороговой Величины){
Пропустить принятый сигнал через фильтр низких частот с сокращенной полосой пропускания в 3 дБ на обеих сторонах;
}
Хотя измерение полезного сигнала и ACI было описано со ссылкой на конкретные алгоритмы, специалистам в данной области техники будет очевидно, что для измерения полезного сигнала и ACI может использоваться любой другой подходящий способ. Соответственно, объем настоящего изобретения не ограничивается описанными выше конкретными подходами для измерения полезного сигнала и ACI, и он охватывает любой способ измерения полезного сигнала и ACI, известный специалистам в данной области техники.
Фиг.6 представляет собой схему последовательности операций, иллюстрирующую способ подавления ACI согласно одному аспекту настоящей технологии. Способ начинается на этапе 601, на котором принимают сигнал. Принятый сигнал включает в себя полезный сигнал и возможные источники помех от одного или более смежных каналов. На этапе 602 составной сигнал, опционально, преобразуют в основную полосу частот. На этапе 603 измеряют мощность и местоположение полезного сигнала и возможных источников помех одного или более смежных каналов. На этапе 604 регулируют местоположение динамического фильтра, чтобы извлечь полезный сигнал.
Согласно одному аспекту измерение на этапе 603 может включать в себя измерение только мощности полезного сигнала и возможных источников помех от одного или более смежных каналов. При такой конфигурации этап 604 регулирования может включать в себя регулирование местоположения, по меньшей мере, одного динамического фильтра, соответствующего измеренным мощностям.
Фиг.7 представляет собой структурную схему, которая иллюстрирует компьютерную систему 700, в которой может быть реализован аспект настоящей технологии. Компьютерная система 700 включает в себя шину 702 или другой механизм связи для передачи информации, а также процессор 704, соединенный с шиной 702 для обработки информации. Компьютерная система 700 также включает в себя память 706, такую как ОЗУ или динамическое устройство хранения, которое соединено с шиной 702 и предназначено для хранения информации и инструкций, которые должны выполняться процессором 704. Память 706 также может использоваться для временного хранения переменной или иной промежуточной информации в течение выполнения инструкций процессором 704. Компьютерная система 700 дополнительно включает в себя устройство 710 хранения данных, такое как магнитный диск или оптический диск, соединенное с шиной 702 и предназначенное для хранения информации и инструкций.
Компьютерная система 700 может быть соединена через модуль 708 ввода/вывода с устройством отображения (не показано), таким как дисплей на электронно-лучевой трубке или жидкокристаллический дисплей для отображения информации пользователю компьютера. Устройство ввода, такое как, например, клавиатура или мышь, также может быть соединено с компьютерной системой 700 через модуль 708 ввода/вывода для передачи информации и выборов команд в процессор 704.
Согласно одному аспекту настоящей технологии подавление ACI выполняется компьютерной системой 700 при исполнении процессором 704 одной или более последовательностей из одной или более инструкций, содержащихся в памяти 706. Такие инструкции могут быть считаны в память 705 из другого машиночитаемого носителя, такого как устройство 710 хранения данных. Выполнение последовательностей инструкций, содержащихся в главной памяти 706, приводит процессор 704 к выполнению описанных этапов процесса. Для исполнения последовательностей инструкций, содержащихся в памяти 706, также могут использоваться один или более процессоров в многопроцессорной конфигурации. Альтернативно, для реализации различных аспектов взамен или в добавление к программным инструкциям может использоваться аппаратная схема. Так, настоящие аспекты не ограничиваются какой-либо конкретной комбинацией аппаратного обеспечения и программного обеспечения.
Термин "машиночитаемый носитель" в использованном здесь значении обозначает любой носитель, который участвует в предоставлении инструкций в процессор 704 для выполнения. Такой носитель может принять множество форм, включая, но не ограничиваясь перечисленным, энергонезависимую память, энергозависимую память и средство передачи. Энергонезависимые носители включают в себя, например, оптические или магнитные диски, такие как устройство 710 хранения данных. Энергозависимые носители включают в себя динамическую память, такую как память 706. Средство передачи включает в себя коаксиальные кабели, медные провода и волоконно-оптические линии, включая провода, которые образуют шину 702. Средство передачи также может принять форму акустических или световых волн, таких как волны, генерируемые при радиочастотной или инфракрасной передаче данных. Обычные формы машиночитаемых носителей включают в себя, например, дискету, гибкий диск, жесткий диск, магнитную ленту, любой другой магнитный носитель, диск CD-ROM, диск DVD, любой другой оптический носитель, перфокарты, бумажные ленты, любой другой физический носитель с шаблонами из дырок, ОЗУ, ППЗУ, ЭППЗУ, флэш-память, любой другой чип или картридж памяти, несущую волну, или любой другой носитель, который может быть считан компьютером.
Специалистам в данной области техники будет очевидно, что различные иллюстративные блоки, модули, элементы, компоненты, способы и алгоритмы, описанные в настоящем документе, могут быть реализованы как электронное аппаратное обеспечение, компьютерное программное обеспечение или их комбинации. Дополнительно, перечисленные могут быть разделены иначе, чем описано выше. Для ясной иллюстрации этой взаимозаменяемости аппаратного обеспечения и программного обеспечения, различные иллюстративные блоки, модули, элементы, компоненты, способы и алгоритмы описаны в терминах их функциональности. Способ реализации такой функции - как аппаратное обеспечение или как программное обеспечение - зависит от конкретного приложения и конструктивных ограничений, налагаемых на систему в целом. Специалисты в данной области техники могут реализовать описанные функциональные возможности различными способами для каждого конкретного приложения.
Следует понимать, что конкретный порядок или иерархия этапов или блоков в раскрытых процессах является только примером. На основании структурных предпочтений, конкретный порядок или иерархия этапов или блоков в процессах может быть изменена. Пункты прилагающейся формулы изобретения, определяющие способы, представляют элементы различных этапов в иллюстративном порядке, и они не предназначены для ограничения конкретным представленным порядком или иерархией.
Вышеизложенное описание приведено для того, чтобы специалист в данной области техники мог реализовать различные описанные аспекты. Специалистам в данной области техники будут очевидны различные модификации этих аспектов, и общие принципы, определенные в настоящем документе, могут быть применены к другим аспектам. Соответственно, формула изобретения не ограничивается показанными в настоящем документе аспектами, и ей следует сопоставить полный объем, причем если не указано иного, ссылки на определенный элемент в единственном числе обозначают не "один и единственный", а "один или более". Если не указано иного, термин "некоторый" обозначает один или более элементов. Местоимения мужского рода (например, его) включают в себя женский и средний род (например, ее и его), и наоборот. Все структурные и функциональные эквиваленты элементов различных аспектов, которые описаны в настоящем раскрытии и которые известны или станут известны специалистам в данной области техники, явным образом включены в настоящий документ посредством ссылки, и они охватываются прилагаемой формулой изобретения. Более того, ничто из раскрытого в настоящем документе не предназначено для предоставления общественности, независимо от того, что подобное раскрытие в явном виде приведено в формуле изобретения. Ни один элемент формулы изобретения не должен истолковываться согласно условиям §112 раздела 35 кодекса законов США, если элемент в явной форме не выражен посредством фразы "средство для" или - в случае элемента формулы изобретения на способ - посредством фразы "этап для".
Изобретение относится к подавлению помех и, в частности, к динамической фильтрации для подавления помех от смежных каналов. Технический результат - возможность оптимального подавления помех при минимальном уровне нежелательного подавления полезного сигнала. Для этого способ для подавления помех смежных каналов содержит этапы, на которых принимают составной сигнал, включающий в себя полезный сигнал и возможные источники помех от одного или более смежных каналов, измеряют полезный сигнал и возможные источники помех от одного или более смежных каналов и регулируют местоположение, по меньшей мере, одного динамического фильтра, чтобы извлечь полезный сигнал. Устройство приемника содержит антенну, сконфигурированную, чтобы принимать составной сигнал, включающий в себя полезный сигнал и возможные источники помех от одного или более смежных каналов, схему измерения помех, сконфигурированную, чтобы измерять полезный сигнал и возможные источники помех от одного или более смежных каналов, по меньшей мере, один динамический фильтр, сконфигурированный, чтобы извлекать полезный сигнал, и процессор, сконфигурированный, чтобы регулировать местоположение, по меньшей мере, одного динамического фильтра, чтобы извлечь упомянутый полезный сигнал. 4 н. и 33 з.п. ф-лы, 10 ил.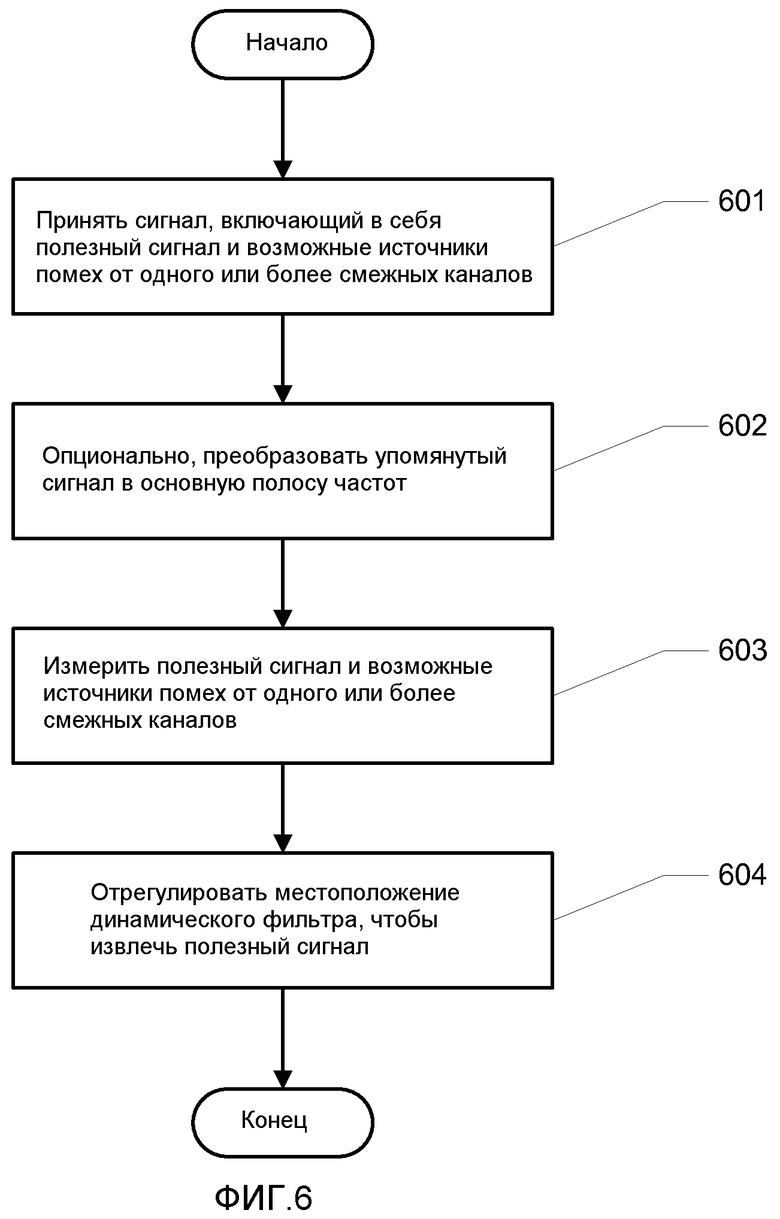
1. Способ для подавления помех от смежных каналов (ACI), содержащий этапы, на которых:
принимают составной сигнал, включающий в себя полезный сигнал и источники помех от одного или более смежных каналов;
измеряют мощность упомянутого полезного сигнала и источников помех от одного или более смежных каналов; и
регулируют местоположение, по меньшей мере, одного динамического фильтра, включая центр, по меньшей мере, одного динамического фильтра на основе мощности упомянутого полезного сигнала относительно мощности источников помех от одного или более смежных каналов, чтобы извлечь упомянутый полезный сигнал.
2. Способ по п.1, в котором упомянутый, по меньшей мере, один динамический фильтр представляет собой полосовой фильтр.
3. Способ по п.2, в котором на этапе регулирования местоположения, по меньшей мере, одного динамического фильтра регулируют полосу пропускания и центр упомянутого полосового фильтра.
4. Способ по п.1, дополнительно содержащий этап, на котором преобразуют упомянутый составной сигнал в промежуточную частоту.
5. Способ по п.4, в котором упомянутый, по меньшей мере, один динамический фильтр представляет собой полосовой фильтр.
6. Способ по п.5, в котором на этапе регулирования местоположения, по меньшей мере, одного динамического фильтра регулируют полосу пропускания упомянутого полосового фильтра.
7. Способ по п.1, дополнительно содержащий этап, на котором преобразуют упомянутый составной сигнал в основную полосу частот.
8. Способ по п.7, в котором упомянутый, по меньшей мере, один динамический фильтр представляет собой фильтр низких частот.
9. Способ по п.8, в котором на этапе регулирования местоположения, по меньшей мере, одного динамического фильтра регулируют полосу пропускания упомянутого фильтра низких частот.
10. Способ по п.1, в котором упомянутые возможные источники помех от одного или более смежных каналов содержат источник помех от первого смежного канала с первым местоположением и источник помех от второго смежного канала со вторым местоположением, причем упомянутое первое местоположение отличается от упомянутого второго местоположения.
11. Способ по п.1, в котором упомянутые возможные источники помех от одного или более смежных каналов содержат источник помех от первого смежного канала с первой мощностью в первом местоположении и источник помех от второго смежного канала со второй мощностью во втором местоположении, причем упомянутая первая мощность отличается от упомянутой второй мощности.
12. Способ по п.1, в котором на этапе регулирования местоположения, по меньшей мере, одного динамического фильтра:
посредством процессора принимают информацию об измерении полезного сигнала и возможных источников помех от одного или более смежных каналов; и
посредством процессора в ответ на принятую информацию генерируют инструкции для регулирования местоположения, по меньшей мере, одного динамического фильтра.
13. Способ по п.1, в котором, по меньшей мере, один динамический фильтр представляет собой фильтр низких частот, причем способ дополнительно содержит:
регулирование местоположения, по меньшей мере, одного динамического фильтра низких частот, чтобы извлечь упомянутый полезный сигнал, включающее в себя:
определение первого соотношения первой частоты ко второй частоте и второго соотношения первой частоты к третьей частоте; и
пропускание упомянутого полезного сигнала через, по меньшей мере, один динамический фильтр низких частот, имеющий заданную сокращенную полосу пропускания на стороне более высокой частоты, когда первое соотношение меньше, чем заданное пороговое значение, а второе соотношение больше, чем заданное пороговое значение;
пропускание упомянутого полезного сигнала через, по меньшей мере, один динамический фильтр низких частот, имеющий заданную сокращенную полосу пропускания на стороне более низкой частоты, когда первое соотношение больше, чем заданное пороговое значение, а второе соотношение меньше, чем заданное пороговое значение; и
пропускание упомянутого полезного сигнала через, по меньшей мере, один динамический фильтр низких частот, имеющий заданную сокращенную полосу пропускания на обеих сторонах более низкой и более высокой частоты, когда первое соотношение меньше, чем заданное пороговое значение, и второе соотношение меньше, чем заданное пороговое значение.
14. Способ по п.1, в котором на этапе измерения полезного сигнала и возможных источников помех от одного или более смежных каналов дополнительно измеряют местоположение упомянутых источников помех от одного или более смежных каналов.
15. Способ по п.14, в котором на этапе регулирования местоположения, по меньшей мере, одного динамического фильтра дополнительно регулируют местоположение, по меньшей мере, одного динамического фильтра на основе местоположения полезного сигнала относительно местоположения источников помех от одного или более смежных каналов.
16. Устройство приемника, содержащее:
антенну, сконфигурированную, чтобы принимать составной сигнал, включающий в себя полезный сигнал и источники помех от одного или более смежных каналов;
схему измерения помех, сконфигурированную, чтобы измерять мощность упомянутого полезного сигнала и источников помех от одного или более смежных каналов;
по меньшей мере, один динамический фильтр, сконфигурированный, чтобы извлекать полезный сигнал; и
процессор, сконфигурированный, чтобы регулировать местоположение, по меньшей мере, одного динамического фильтра, включая центр упомянутого фильтра, на основе мощности упомянутого полезного сигнала относительно мощности источников помех от одного или более смежных каналов, чтобы извлечь упомянутый полезный сигнал.
17. Устройство приемника по п.16, в котором упомянутый, по меньшей мере, один динамический фильтр представляет собой полосовой фильтр.
18. Устройство приемника по п.17, в котором процессор сконфигурирован, чтобы регулировать местоположение упомянутого полосового фильтра.
19. Устройство приемника по п.16, дополнительно содержащее преобразование упомянутого составного сигнала в промежуточную частоту.
20. Устройство приемника по п.19, в котором упомянутый, по меньшей мере, один динамический фильтр представляет собой полосовой фильтр.
21. Устройство приемника по п.20, в котором процессор сконфигурирован, чтобы регулировать местоположение упомянутого полосового фильтра.
22. Устройство приемника по п.16, дополнительно содержащее преобразователь, сконфигурированный, чтобы преобразовывать упомянутый составной сигнал в основную полосу частот.
23. Устройство приемника но п.22, в котором упомянутый, по меньшей мере, один динамический фильтр представляет собой фильтр низких частот.
24. Устройство приемника по п.23, в котором процессор сконфигурирован, чтобы регулировать местоположение упомянутого фильтра низких частот.
25. Устройство приемника по п.16, в котором упомянутые возможные источники помех от одного или более смежных каналов содержат источник помех от первого смежного канала с первым местоположением и источник помех от второго смежного канала со вторым местоположением, причем упомянутое первое местоположение отличается от упомянутого второго местоположения.
26. Устройство приемника по п.16, в котором упомянутые возможные источники помех от одного или более смежных каналов содержат источник помех от первого смежного канала с первой мощностью в первом местоположении и источник помех от второго смежного канала со второй мощностью во втором местоположении, причем упомянутая первая мощность отличается от упомянутой второй мощности.
27. Устройство приемника по п.16, в котором, по меньшей мере, один динамический фильтр представляет собой фильтр низких частот, причем регулирование местоположения, по меньшей мере, одного динамического фильтра низких частот, чтобы извлечь упомянутый полезный сигнал, включает в себя:
определение первого соотношения первой частоты ко второй частоте и второго соотношения первой частоты к третьей частоте; и
пропускание упомянутого полезного сигнала через, по меньшей мере, один динамический фильтр низких частот, имеющий заданную сокращенную полосу пропускания на стороне более высокой частоты, когда первое соотношение меньше, чем заданное пороговое значение, а второе соотношение больше, чем заданное пороговое значение;
пропускание упомянутого полезного сигнала через, по меньшей мере, один динамический фильтр низких частот, имеющий заданную сокращенную полосу пропускания на стороне более низкой частоты, когда первое соотношение больше, чем заданное пороговое значение, а второе соотношение меньше, чем заданное пороговое значение; и
пропускание упомянутого полезного сигнала через, по меньшей мере, один динамический фильтр низких частот, имеющий заданную сокращенную полосу пропускания на обеих сторонах более низкой и более высокой частоты, когда первое соотношение меньше, чем заданное пороговое значение, и второе соотношение меньше, чем заданное пороговое значение.
28. Устройство приемника по п.16, в котором схема измерения дополнительно сконфигурирована, чтобы измерять местоположение упомянутых источников помех от одного или более смежных каналов.
29. Устройство приемника по п.28, в котором процессор дополнительно сконфигурирован, чтобы регулировать местоположение, по меньшей мере, одного динамического фильтра, чтобы соответствовать местоположению упомянутого полезного сигнала относительно местоположения упомянутых источников помех от одного или более смежных каналов.
30. Машиночитаемый носитель, содержащий хранящиеся в нем инструкции, которые при выполнении в процессоре обеспечивают выполнение процессором способа для подавления помех от смежных каналов, причем упомянутые инструкции содержат:
прием составного сигнала, включающего в себя полезный сигнал и источники помех от одного или более смежных каналов;
измерение мощности упомянутого полезного сигнала и источников помех от одного или более смежных каналов; и
регулирование местоположения, по меньшей мере, одного динамического фильтра, включая центр упомянутого фильтра, на основе мощности упомянутого полезного сигнала относительно мощности источников помех от одного или более смежных каналов, чтобы извлечь упомянутый полезный сигнал.
31. Машиночитаемый носитель по п.30, причем упомянутые инструкции дополнительно содержат преобразование составного сигнала в промежуточную частоту.
32. Машиночитаемый носитель по п.30, причем упомянутые инструкции дополнительно содержат преобразование составного сигнала в основную полосу частот.
33. Машиночитаемый носитель по п.30, причем измерение полезного сигнала и возможных источников помех от одного или более смежных каналов содержит измерение местоположения источников помех от одного или более смежных каналов.
34. Машиночитаемый носитель по п.30, причем регулирование местоположения, по меньшей мере, одного динамического фильтра содержит регулирование местоположения, по меньшей мере, одного динамического фильтра, чтобы соответствовать местоположению полезного сигнала относительно местоположения источников помех от одного или более смежных каналов.
35. Машиночитаемый носитель по п.30, причем, по меньшей мере, один динамический фильтр представляет собой, по меньшей мере, один динамический фильтр низких частот, и регулирование местоположения, по меньшей мере, одного динамического фильтра низких частот для извлечения упомянутого полезного сигнала дополнительно содержит:
определение первого соотношения первой частоты ко второй частоте и второго соотношения первой частоты к третьей частоте; и
пропускание упомянутого полезного сигнала через, по меньшей мере, один динамический фильтр низких частот, имеющий заданную сокращенную полосу пропускания на стороне более высокой частоты, когда первое соотношение меньше, чем заданное пороговое значение, а второе соотношение больше, чем заданное пороговое значение;
пропускание упомянутого полезного сигнала через, по меньшей мере, один динамический фильтр низких частот, имеющий заданную сокращенную полосу пропускания на стороне более низкой частоты, когда первое соотношение больше, чем заданное пороговое значение, а второе соотношение меньше, чем заданное пороговое значение; и
пропускание упомянутого полезного сигнала через, по меньшей мере, один динамический фильтр низких частот, имеющий заданную сокращенную полосу пропускания на обеих сторонах более низкой и более высокой частоты, когда первое соотношение меньше, чем заданное пороговое значение, и второе соотношение меньше, чем заданное пороговое значение.
36. Процессор для подавления ACI, сконфигурированный, чтобы:
измерять мощность полезного сигнала и мощность источников помех от одного или более смежных каналов; и
регулировать местоположение, по меньшей мере, одного динамического фильтра, включая центр упомянутого фильтра, чтобы соответствовать мощности полезного сигнала относительно мощности источников помех от одного или более смежных каналов.
37. Процессор по п.36, который дополнительно сконфигурирован, чтобы измерять местоположение источников помех от одного или более смежных каналов; и
регулировать местоположение, по меньшей мере, одного динамического фильтра, чтобы соответствовать местоположению полезного сигнала относительно местоположения источников помех от одного или более смежных каналов.
| Способ оценки стойкости пены при разрушении ее пылевым потоком | 1988 |
|
SU1603245A1 |
| МНОГОКАНАЛЬНЫЙ ПЕРЕПРОГРАММИРУЕМЫЙ ЦИФРОВОЙ ПРИЕМНЫЙ ТРАКТ | 2004 |
|
RU2289202C2 |
| МНОГОКАНАЛЬНОЕ КОРРЕЛЯЦИОННО-ФИЛЬТРОВОЕ ПРИЕМНОЕ УСТРОЙСТВО | 2002 |
|
RU2205422C1 |
| FR 2871966 А1, 23.12.2005 | |||
| Способ ковки слитка | 1985 |
|
SU1379003A1 |
| US 7039093 B2, 02.05.2006. | |||

