ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к устройству и способу нанесения равномерного покрытия из жидкости на пористый субстрат и, более конкретно, к контактной головке и захватывающей конструкции, предназначенным для нанесения порошка или порошка, суспендированного в наполнителе, на одну поверхность пористого субстрата с целью создания комбинированного медицинского устройства.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Способ нанесения покрытий из жидкости на субстраты известен специалистам. Выбор способа нанесения жидкости на субстрат определяется следующими факторами: взаимодействием жидкости с субстратом, средой, в которой происходит нанесение, характером субстрата, например, твердый, пористый и т.п., а также любыми опасностями, которые создают для окружающей среды агенты-наполнители, входящие в состав жидкого покрытия.
К известным традиционным способам нанесения относятся напыление жидкого покрытия на субстрат и погружение субстрата в ванну с жидкостью. Однако напыление неприемлемо, если жидкость представляет опасность для окружающей среды. Кроме этого, напыление не всегда позволяет соблюсти высокие стандарты качества, требуемые в некоторых областях, например, в медицине, когда жидкости наносятся на поверхность пористого субстрата, используемого в медицинских целях. В данном случае напыление может отрицательно сказаться на равномерности нанесения покрытия на поверхность субстрата, а также на коэффициенте использования жидкости. При напылении коэффициент использования жидкости может составлять от 50 до 80%. Если напыляемое средство является дорогостоящим, то низкая эффективность использования может создавать проблемы.
Что касается погружения в ванну, то в этом случае также наблюдаются проблемы с эффективностью использования жидкости и с равномерностью нанесения. Кроме того, данный способ неприемлем, если требуется нанести покрытие только на одну сторону субстрата. Также в случае с погружением известным способом является использование вакуумного захвата субстрата перед его погружением; однако такой способ не работает в случае пористого субстрата.
Исходя из вышеизложенного, существует потребность в усовершенствованном способе нанесения жидких покрытий на субстрат, в особенности, на пористый субстрат, используемый в медицинской сфере.
КРАТКОЕ ОПИСАНИЕ
Настоящее изобретение включает много аспектов и особенностей.
В первом аспекте изобретения контактная головка, предназначенная для захвата субстрата без его деформирования или повреждения, включает совокупность штырей, расположенных во множестве параллельных рядов штырей под заданным углом штыря. Штыри смежных рядов расположены так, что угол наклона штырей в одном ряду обратно симметричен углу наклона штырей в соседнем ряду штырей. При выдвигании штырей штыри, находящиеся в одном ряду, движутся все вместе в одном направлении. Это направление определяется углом наклона штырей в ряду, следовательно, соседние ряды при выдвигании штырей движутся в противоположных продольных направлениях относительно друг друга. Кроме того, совокупность штырей располагается так, что при выдвигании штырей из нижней поверхности контактной головки величина выдвигания по существу равномерна, чтобы выдвинутые штыри могли захватить поверхность субстрата.
Одной из особенностей данного аспекта является то, что совокупность штырей имеет вид четырех параллельных рядов. Другой особенностью данного аспекта является то, что угол наклона штырей лежит в диапазоне от 15° до 45°. Применительно к данной детализации предпочтительно, чтобы угол расположения штырей составлял 28°.
В еще одной особенности каждый ряд штырей включает пять штырей. В еще одной особенности концы соседних рядов штырей смещены относительно друг друга, и концы штырей перемежающихся рядов штырей выровнены относительно друг друга.
Во втором аспекте изобретения захватывающая конструкция для зацепления поверхности субстрата включает накрывающую пластину, монтажный блок штырей, выполненный с возможностью вставки в накрывающую пластину и приема пары приводных педалей так, чтобы педали могли перемещаться между оттянутым положением и положением захвата, а также множество держателей штырей, из поверхностей которых выдается множество штырей. Множество держателей штырей установлено на приводных педалях таким образом, чтобы штыри были направлены в сторону накрывающей пластины, и чтобы движение держателей штырей контролировалось при помощи приводных педалей. Совокупность штырей выдвигается из поверхности накрывающей пластины, когда приводные педали находятся в положении захвата, и это позволяет штырям захватить поверхность субстрата. Штыри оттягиваются от поверхности накрывающей пластины, когда приводные педали находятся в оттянутом положении, что позволяет штырям освободить поверхность субстрата.
В одной детализации данного аспекта в накрывающей пластине имеется углубление для установки монтажного блока штырей. Применительно к этой детализации в углублении имеется множество прорезей, проделанных в дне этого углубления для выдвигания через них штырей, когда приводные педали находятся в положении захвата.
В другой детализации данного аспекта движущая сила, которая перемещает приводные педали между положением захвата и оттянутым положением, обеспечивается одним силовым приводом. В еще одной детализации захватывающая конструкция включает множество монтажных блоков штырей, при этом накрывающие пластины имеют множество углублений для приема множества монтажных блоков штырей.
В еще одной детализации монтажный блок штырей и пара приводных педалей выполнены с возможностью двигаться, скользя относительно друг друга, в результате чего пара приводных педалей перемещается между положением захвата и оттянутым положением. В других детализациях захватывающая конструкция включает четыре держателя штырей с пятью штырями на каждом держателе. В еще одной детализации штыри выдаются из поверхности множества держателей штырей под углом.
В третьем аспекте изобретения способ захвата и освобождения пористого субстрата включает несколько этапов. Первый этап связан с обеспечением устройства, имеющего платформу для размещения пористого субстрата, а также контактную головку, включающую множеством выдвигаемых и втягиваемых штырей для осуществления захвата, удержания и освобождения субстрата, в которой множество штырей организовано как множество параллельных рядов штырей, расположенных под заданным углом, причем штыри соседних рядов расположены так, что углы наклона штырей в ряду обратно симметричны углам наклона штырей в соседнем ряду штырей. К дальнейшим этапам относится размещение субстрата на платформе устройства и опускание контактной головки в положение захвата. Еще один этап связан с выдвижением штырей контактной головки, в результате чего субстрат захватывается без повреждения или деформации его поверхности. К другим этапам относятся подъем захваченного субстрата с платформы, опускание контактной головки с захваченным субстратом в положение его освобождения и втягивание штырей головки для освобождения субстрата.
В одной детализации данного аспекта положение для захвата определяется на основе длины выдвижения штырей из контактной головки и толщины субстрата. В другой детализации способ включает этап проверки захвата субстрата с помощью матрицы датчиков контактной головки. Применительно к этой детализации способ также включает этап проверки равномерности подъема субстрата с помощью матрицы датчиков.
В четвертом аспекте изобретения способ нанесения равномерного покрытия из жидкости на поверхность пористого субстрата включает несколько этапов. Первоначальный этап включает обеспечение устройства, имеющего платформу для размещения пористого субстрата, находящегося в резервуаре для покрытия. Данное устройство также имеет контактную головку с множеством выдвигаемых и втягиваемых штырей для осуществления захвата, удержания и освобождения субстрата равномерно в резервуаре для покрытия, причем множество штырей организовано как множество параллельных рядов штырей, расположенных под заданным углом, причем штыри соседних рядов расположены так, что углы наклона штырей в ряду обратно симметричны углам наклона штырей в соседнем ряду штырей. К дополнительным этапам относятся размещение резервуара для покрытия на платформу устройства и выдвигание штырей контактной головки для захвата поверхности субстрата. К дальнейшим этапам относятся подъем захваченного субстрата из резервуара для покрытия, проверка равномерности захвата субстрата с помощью матрицы датчиков и наливание жидкого покрытия в пустой резервуар для покрытия. К следующим этапам, выполняемым после налива жидкого покрытия в резервуар для покрытия, относится опускание ровно удерживаемого субстрата в позицию для освобождения и втягивание штырей контактной головки с равномерным освобождением субстрата в резервуар для покрытия, что обеспечивает нанесение равномерного покрытия на поверхность субстрата.
В одной детализации данного аспекта пористый субстрат состоит из гибкой матрицы материала, изготовленной из окисленной регенерированной целлюлозной основы материала с включенными волокнами полиглактина 910. В другой детализации данного аспекта жидкое покрытие состоит из суспензии, полученной при суспендировании человеческого фибриногена и человеческого тромбина в гидрофторэфирном растворителе.
КРАТКОЕ ОПИСАНИЕ ФИГУР
Настоящее изобретение будет подробно описываться со ссылками на прилагаемые рисунки, на которых одни и те же элементы обозначаются одинаковыми номерами, и где
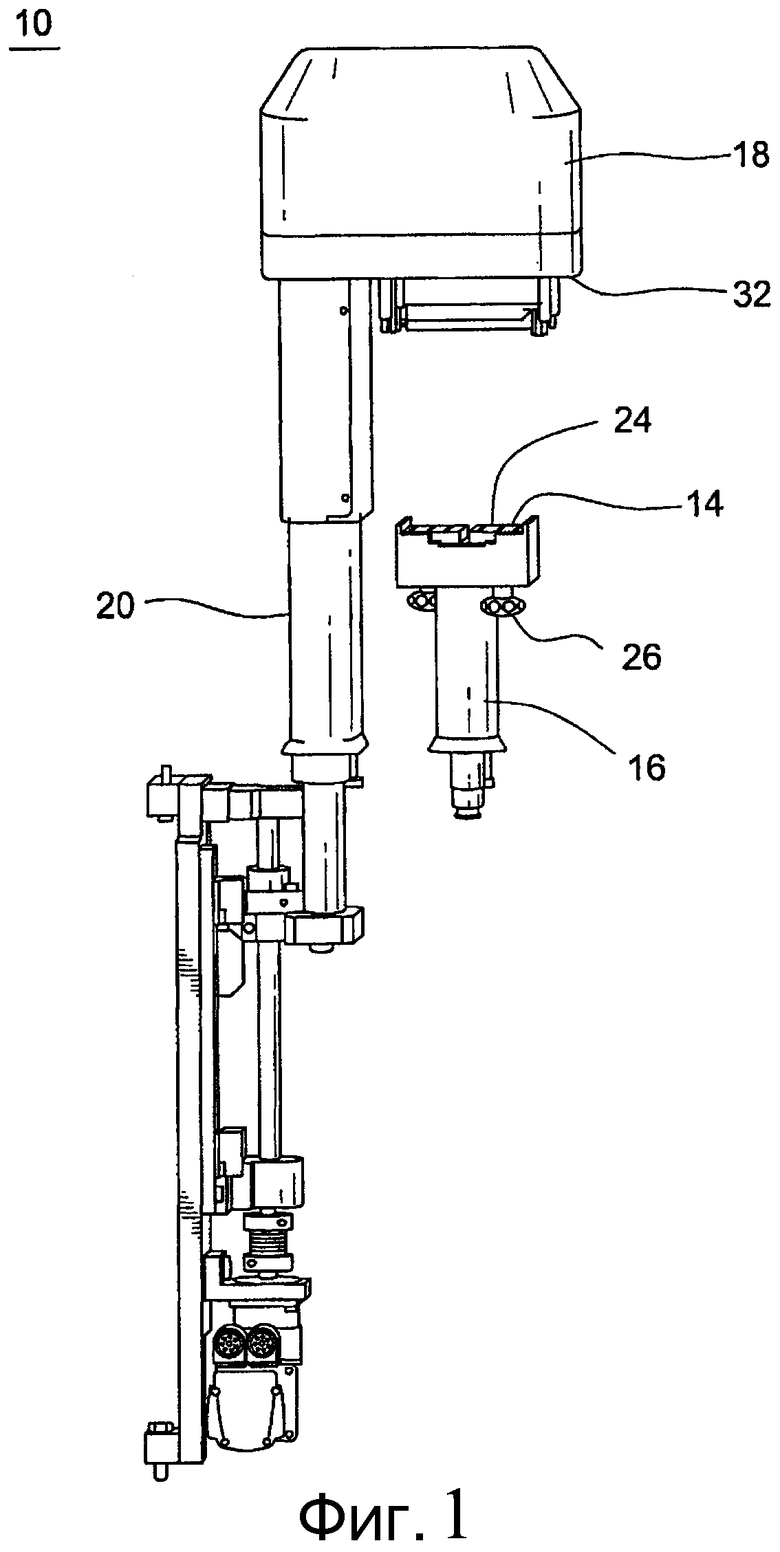
на фиг. 1 представлен вид в перспективе устройства для нанесения покрытия в соответствии с предпочтительным примером осуществления настоящего изобретения;
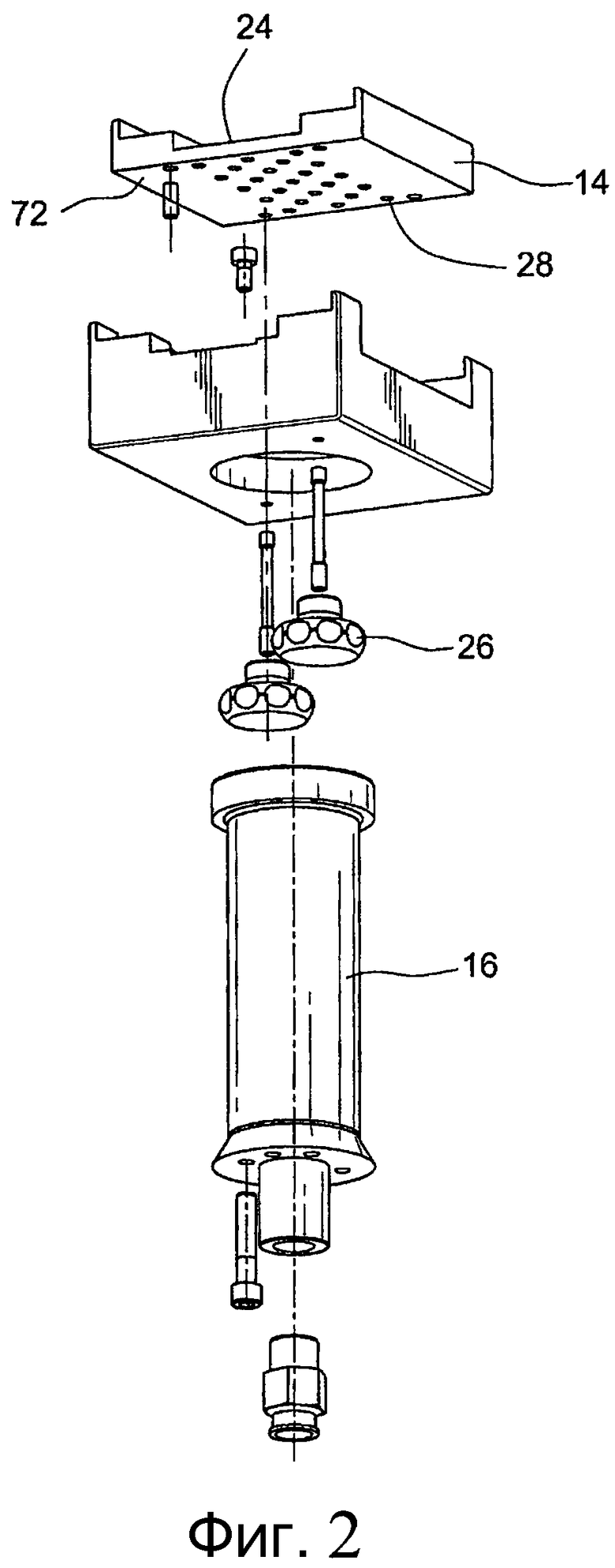
на фиг. 2 представлен вид в перспективе разобранной платформы для субстрата и на опорный элемент платформы;
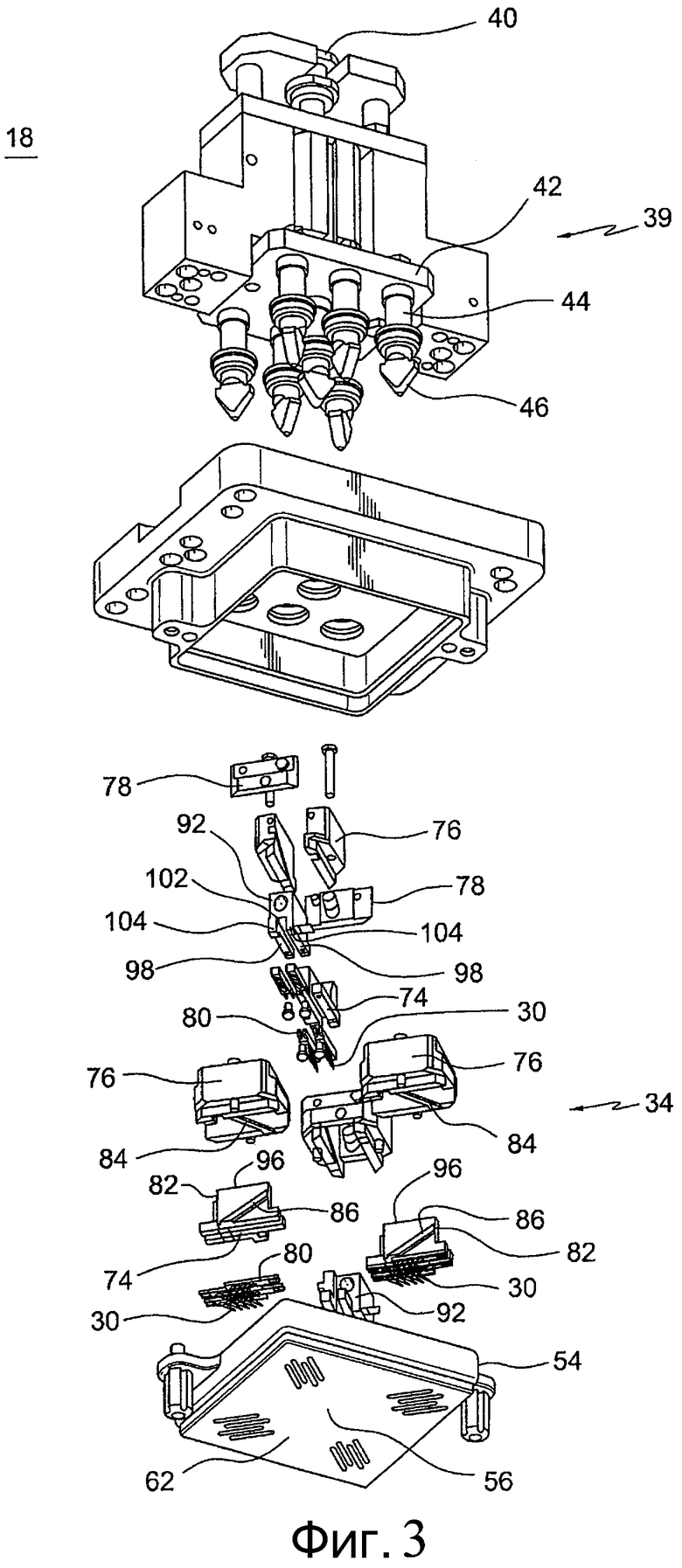
на фиг. 3 представлен вид в перспективе разобранной контактной головки;
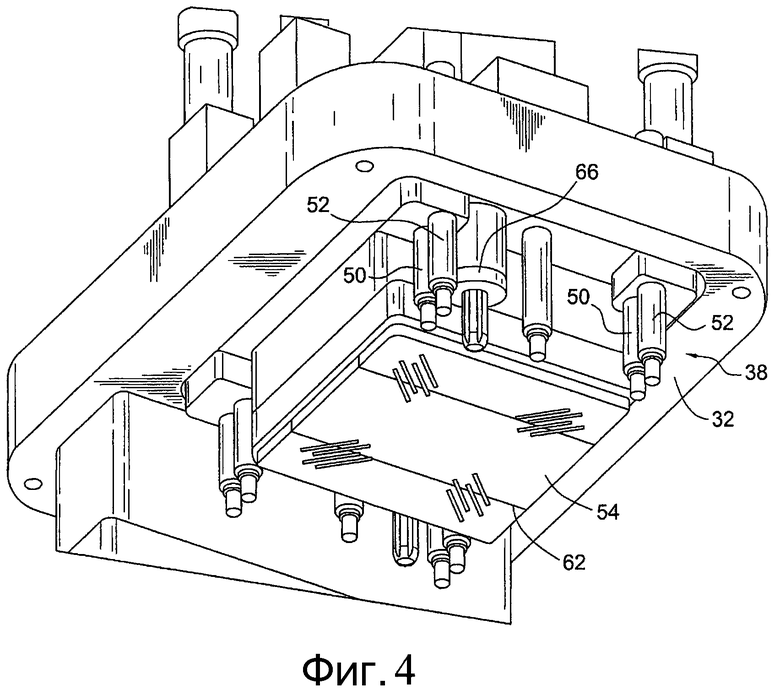
на фиг. 4 представлен вид в перспективе снизу на контактную головку;
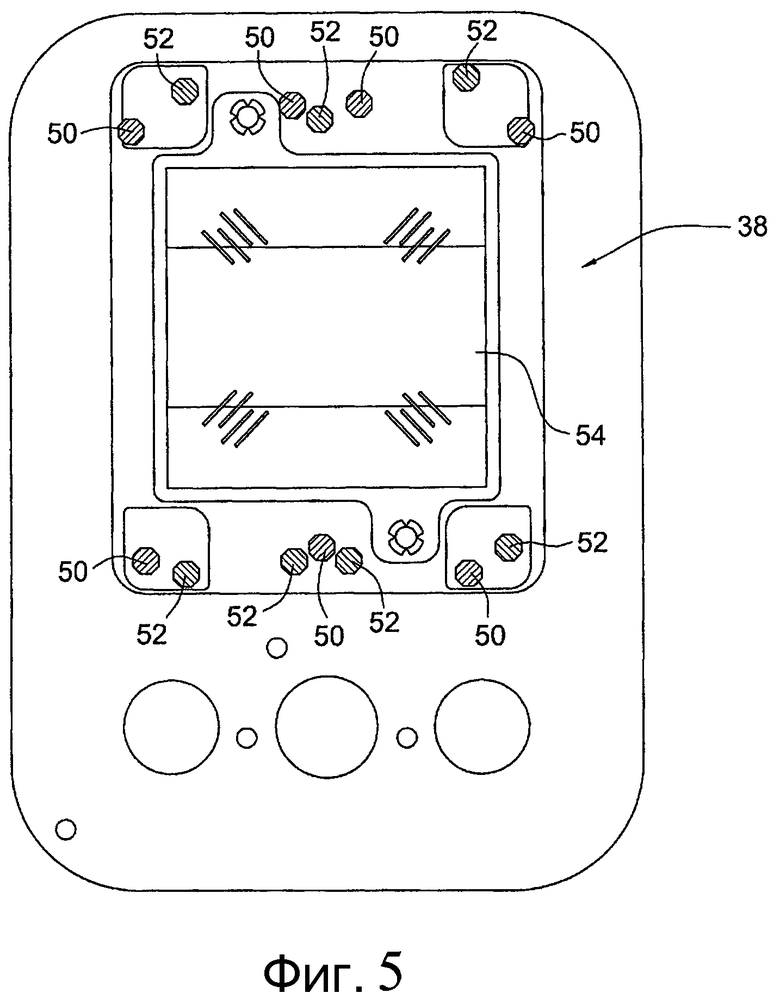
на фиг. 5 представлен вид в плане снизу на контактную головку;
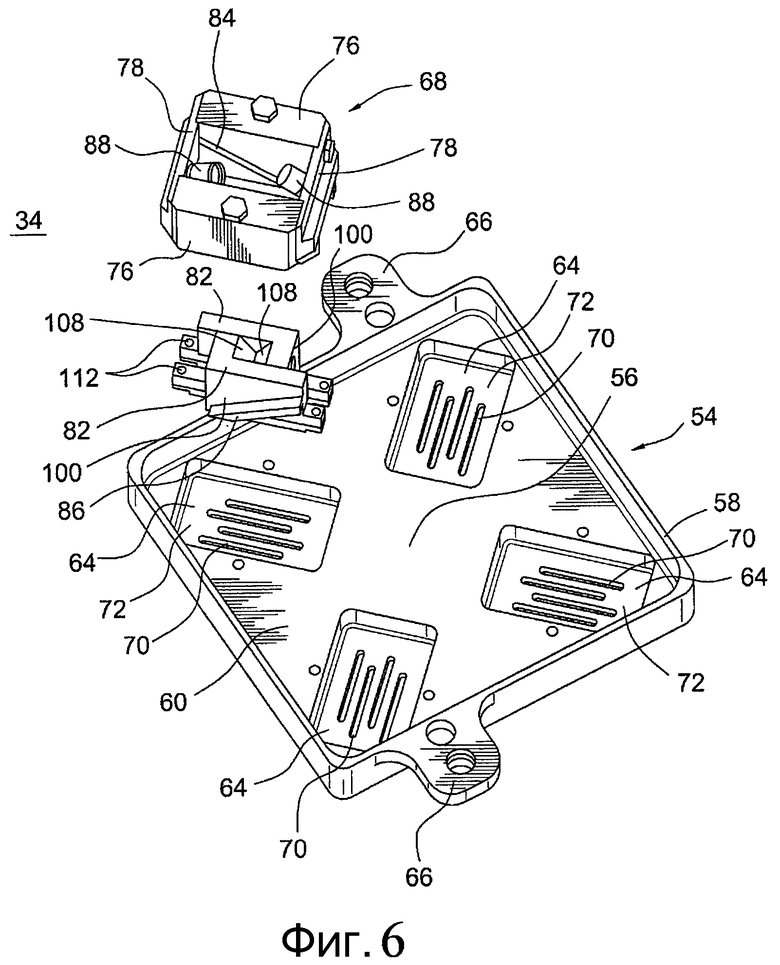
на фиг. 6 представлен вид в перспективе на разобранную захватывающую головку;
на фиг. 7 представлен вид в перспективе на захватывающую головку со снятыми монтажными блоками штырей для лучшей иллюстрации приводных педалей;
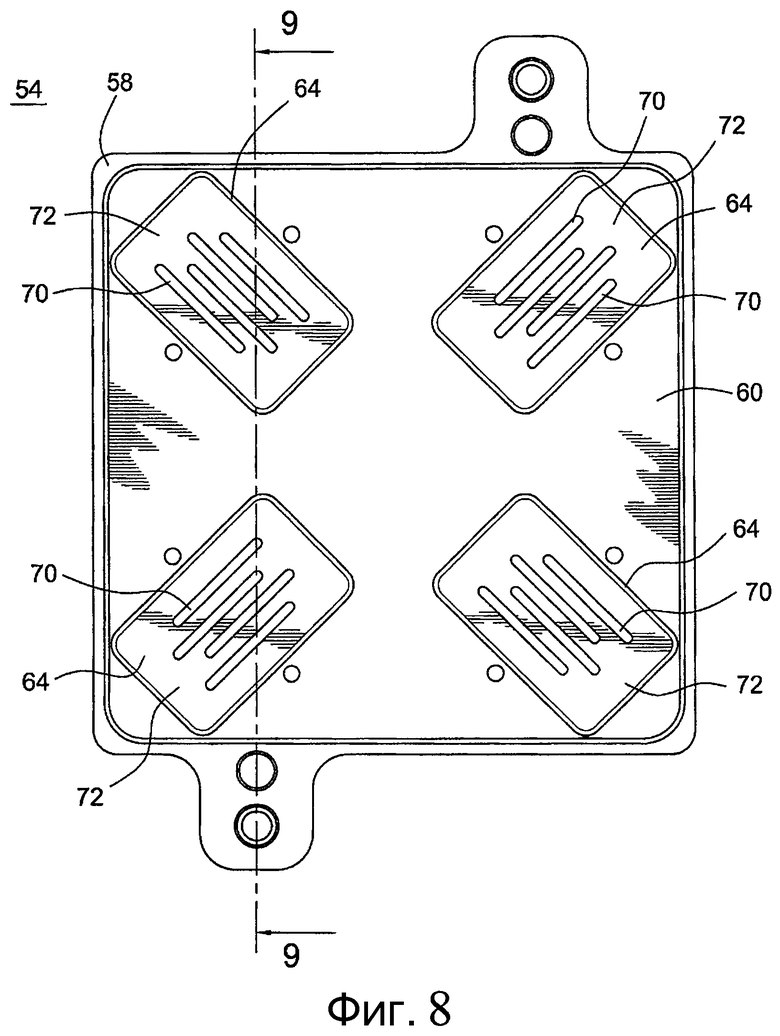
на фиг. 8 представлен вид в плане сверху на накрывающую пластину;
на фиг. 9 представлено поперечное сечение накрывающей пластины, показанной на фиг. 8, сделанное по линии A-A;
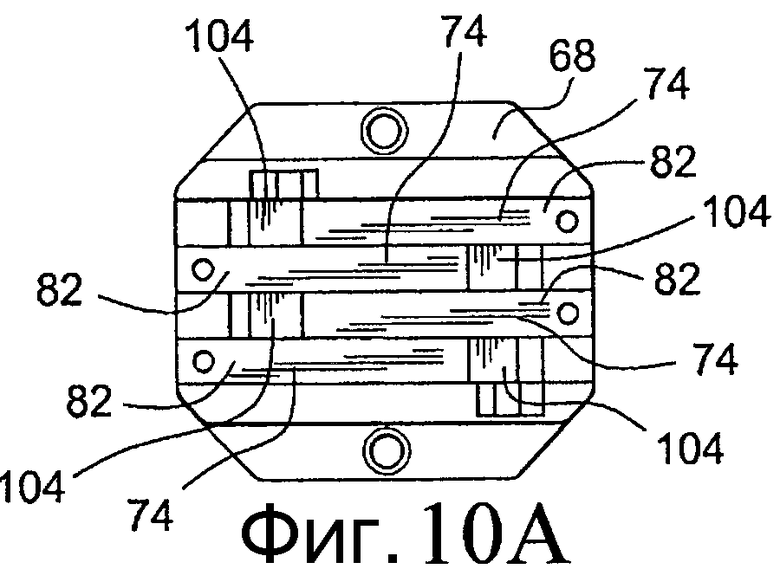
на фиг. 10A представлен вид в плане сверху на монтажный блок штырей с установленными в нем движущими педалями;
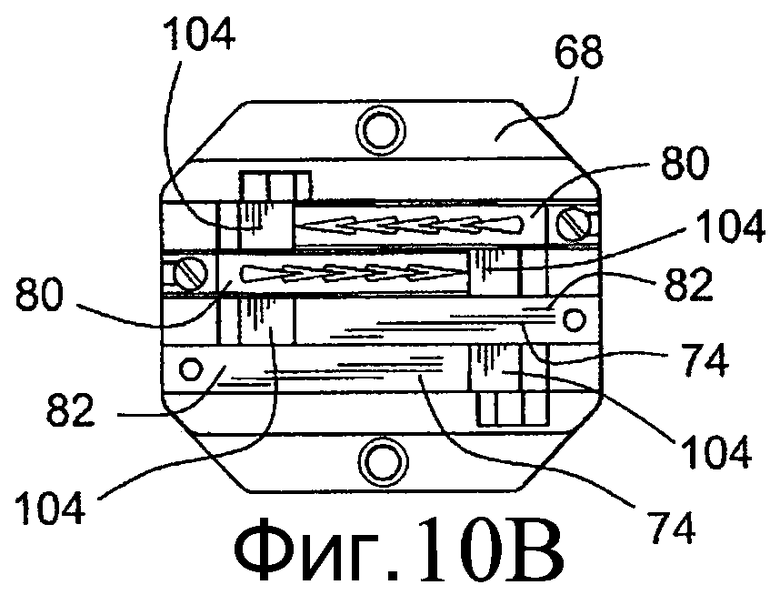
на фиг. 10B представлен вид в плане сверху на монтажный блок штырей, показанный на фиг. 10A, с двумя установленными держателями штырей;
на фиг. 10С представлен вид в плане сверху на монтажный блок штырей, показанный на фиг. 10A, с четырьмя установленными держателями штырей;
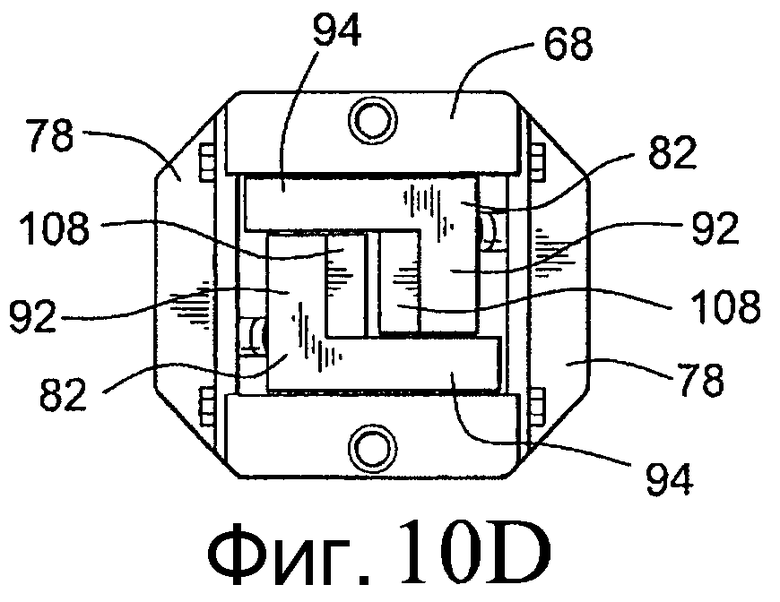
на фиг. 10D представлен вид в плане снизу на монтажный блок штырей, показанный на фиг. 10A;
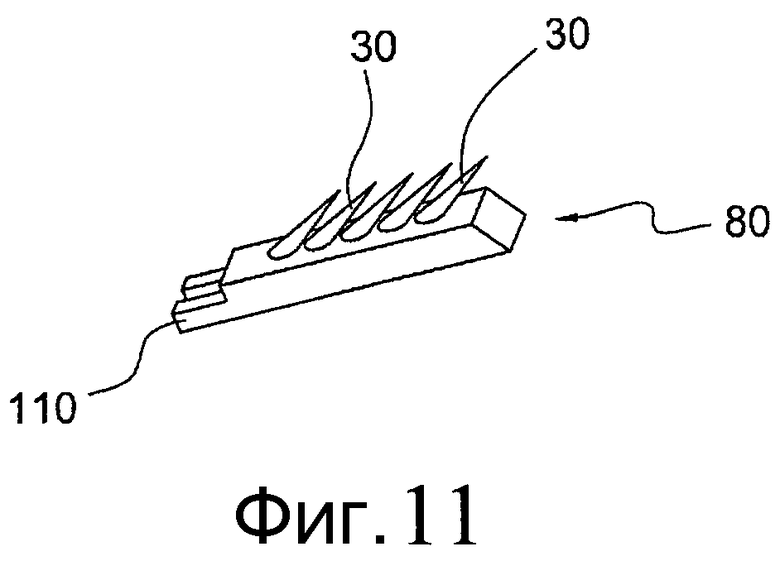
на фиг. 11 представлен вид в перспективе на держатель штырей;
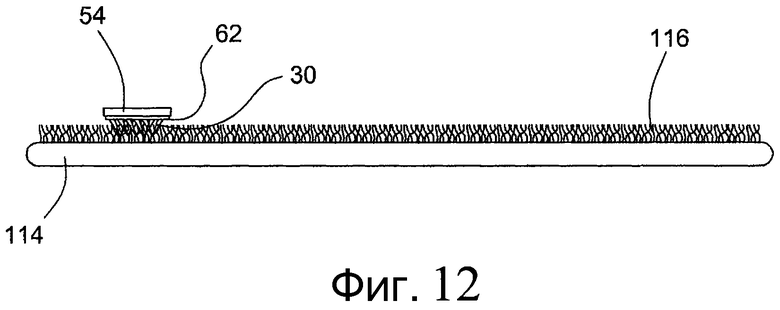
на фиг. 12 представлена вертикальная боковая проекция штырей, захватывающих волокна материала субстрата; и
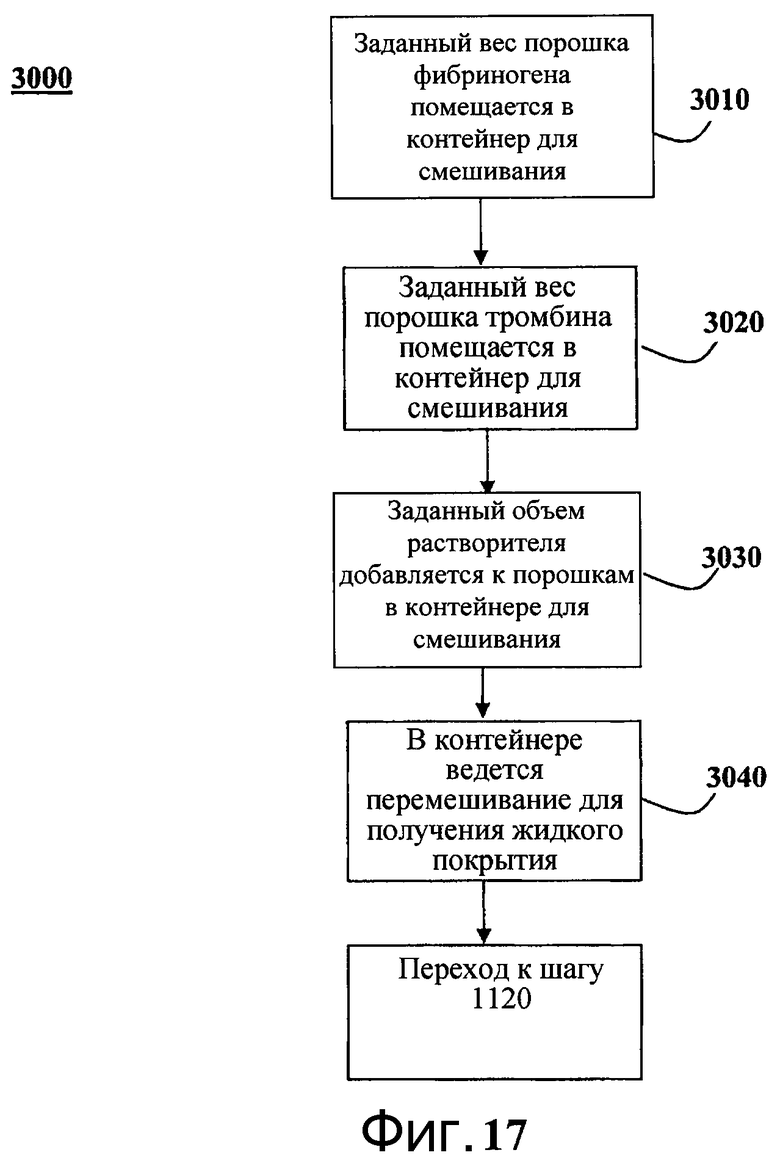
на фиг. 13-17 показаны блок-схемы, описывающие способ нанесения покрытия.
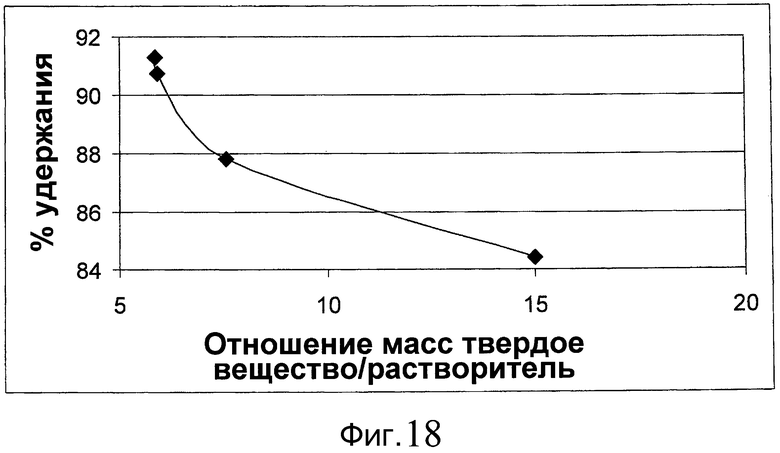
На фиг. 18 представлен график зависимости удержания твердых веществ от плотности суспензии для примера 3.
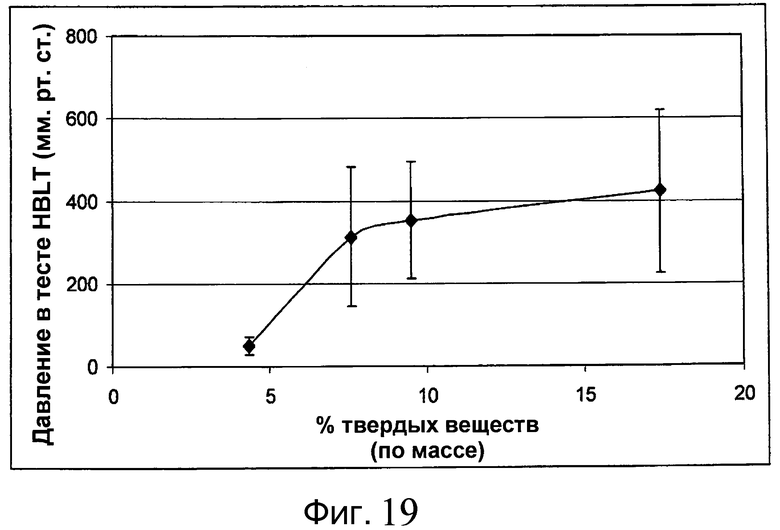
На фиг. 19 представлен график зависимости максимального давления разрыва от плотности суспензии для примера 5.
ПОДРОБНОЕ ОПИСАНИЕ
Описывается устройство и способ для точного захвата, освобождения и размещения пористого субстрата без его деформации и повреждения. Как описано в настоящем документе, данное устройство и способ используются для нанесения равномерного покрытия из жидкости на поверхность пористого субстрата для создания комбинированного медицинского устройства. Однако данное устройство и способ могут применяться во многих других оперативных процедурах, где требуется точно поднять и разместить пористый субстрат, например, в процедурах контроля качества и в процедурах упаковки.
Комбинированное медицинское устройство, изготавливаемое с применением способа, описанного в настоящем документе, представляет собой фибриновый пластырь. Фибриновый пластырь представляет собой биорассасывающийся продукт, состоящий из двух кровоостанавливающих человеческих белков, тромбина и фибриногена, нанесенных на гибкий композитный субстрат и упакованных в герметичный пакет из фольги. Фибриновый пластырь был создан для замедления и остановки активных кровотечений, в том числе, сложных и опасных. Его действие связано с физиологическими механизмами образования фибриновых сгустков, которые запускаются при контакте пластыря с поверхностью кровоточащей раны. Хотя описанный в настоящем документе способ может применяться для изготовления фибринового пластыря, следует понимать, что данный способ не ограничивается созданием фибриновых пластырей, но может использоваться в любой сфере, где требуется нанести на пористый субстрат покрытие из жидкости.
Если обратиться к рисункам, на фиг. 1 приводится иллюстрация устройства для нанесения покрытий 10. Устройство для нанесения покрытий 10 содержит платформу для субстрата 14, опору платформы 16, контактную головку 18 и вертикальную стойку 20, к которой крепится контактная головка 18. В широком смысле контактная головка 18 применяется для захвата и подъема субстрата 114 (показан на фиг. 12), помещенного на платформу субстрата 14.
Платформа субстрата 14 и контактная головка 18 могут монтироваться на любой конструкции с ровной поверхностью, например, на столе (не показан). Платформа субстрата 14 и контактная головка 18 устанавливаются таким образом, чтобы контактная головка 18 располагалась над платформой субстрата 14, причем нижняя поверхность 32 контактной головки 18 должна быть обращена в сторону, противоположную относительно рабочей поверхности 24 платформы субстрата 14. Опора платформы 16 располагается между конструкцией, на которую крепится устройство, и платформой субстрата 14, и она удерживает платформу субстрата 14 на фиксированной высоте над конструкцией, на которую крепится устройство.
На фиг. 2 показана платформа субстрата 14. Платформа субстрата 14 имеет такую конструкцию, что резервуар для покрытия, внутри которого находится субстрат, можно легко установить на рабочую поверхность 24 платформы и закрепить на ней. Форма платформы субстрата 14 определяется размерами резервуара для покрытия, вмещающего субстрат. Платформа субстрата 14 имеет выравнивающие винты 26, расположенные на ее обратной стороне, и они предназначены для выравнивания платформы субстрата 14 относительно поверхности, на которую устанавливается конструкция 10, и относительно контактной головки 18. Предпочтительно, чтобы платформа 14 была изготовлена из стойкого материала, допускающего чистку щелочными химикатами и автоклавирование. К примерам таких материалов относятся, в том числе, нержавеющая сталь и полиэфирэфиркетон (ПЭЭК). Хотя в данном описании платформа 14 используется в медицинской сфере, для нее можно также применять материал, не используемый в медицине.
Резервуар для покрытий может крепиться к платформе субстрата 14 любым стандартным способом, например, зажимами, пневмоцилиндрами и т.п. Предпочтительным способом крепления резервуара для покрытий к платформе субстрата является вакуумный способ. Платформа субстрата 14 на фиг. 2 представляет собой вакуумную плиту, имеющую отверстия 28 в днище 72 для притягивания вакуумом резервуара для покрытий, находящегося на платформе.
Резервуар для покрытий может иметь по существу ровное дно или дно, которое может стать ровным при закреплении резервуара на платформе 14. Предпочтительно, чтобы резервуар для покрытий имел размер, подходящий для размещения в нем субстрата. Более конкретно, предпочтительно, чтобы объем резервуара для покрытий соответствовал размерам субстрата. Резервуар для покрытий может быть изготовлен из стойкого материала, допускающего многократную чистку щелочными химикатами и автоклавирование. Примером предпочтительного материала является пластик.
Что касается субстрата 114 (показан на фиг. 12), то с помощью контактной головки 18 можно захватывать и поднимать самые различные пористые субстраты. Субстрат 114, как правило, будет представлять собой материал-основу с волокнами 116 (показаны на фиг. 12), торчащими или выдающимися из его поверхности. Эти волокна 116 являются периферическими для субстрата 114, и они позволяют штырям 30 контактной головки 18 захватить субстрат 114, не протыкая и не проходя сквозь субстрат 114. Кроме того, субстрат 114, как правило, имеет толщину от приблизительно 0,102 до 0,229 см (0,04-0,09 дюйма). Размер субстрата 114 может варьироваться, однако типичный размер субстрата составляет 10,16 см x 10,16 см (4 дюйма x 4 дюйма).
Описанный здесь субстрат 114 состоит из гибкой матрицы материала, изготовленной из окисленной регенерированной целлюлозной основы материала (ОРЦ) с включенными в нее волокнами полиглактина 910 (PG910). Для создания субстрата 114 из волокон PG910 формируется нетканый лист войлока, который иглопробивным способом встраивается в структуру ОРЦ. Оба эти материала идентичны материалам, используемым при изготовлении коммерческих продуктов, т.е. нитям INTERCEEDTM (ОРЦ) и VICRYL™ (PG910). Область изобретения не ограничивается использованием определенного субстрата 114, описанного в настоящем документе. Точнее, может использоваться любой субстрат, который могут захватывать и поднимать штыри контактной головки. Пример субстрата полностью описывается в принадлежащей авторам настоящего изобретения опубликованной заявке на патент США № 2006/0257457, которая полностью включается в настоящий документ в силу ссылки.
Как показано на фиг. 1, контактная головка 18 подвижно соединена с вертикальной стойкой 20 в горизонтальной ориентации и располагается над платформой субстрата 14 таким образом, что нижняя поверхность 32 контактной головки 18 направлена в противоположную сторону относительно рабочей поверхности 24 платформы субстрата 14. Контактная головка 18 включает совокупность штырей 30 (вероятно, лучше всего видны на фиг. 6 и 11), которые могут выдвигаться из нижней поверхности 32 контактной головки для захвата и подъема субстрата 114, который располагается на рабочей поверхности 24 платформы субстрата 14.
Контактная головка 18 может перемещаться вверх и вниз вдоль вертикальной стойки 20, что позволяет ей придвигаться к или отодвигаться от платформы 14 и любого субстрата 114, который может на ней находиться. Перемещением контактной головки 18 управляет программное обеспечение. Данное программное обеспечение можно запрограммировать на такое перемещение контактной головки 18, чтобы она находилась в нужном положении или на нужной высоте относительно платформы субстрата 14. К примерам положений головки относятся исходное положение, положение захвата и положение освобождения. Примером высоты является высота успокоения. Эти заданные положения и высоты более подробно будут рассматриваться ниже. В программном обеспечении также можно запрограммировать управление движениями, связанными с другими операциями устройства для нанесения покрытий, например, включением вакуума.
Для перемещения контактной головки вверх и вниз могут использоваться многие традиционные механизмы. Примерами являются, в том числе, шаговый двигатель, пневмоцилиндр и т.п. Для полного контроля положения и скорости предпочтительным является линейный ползун с сервоприводом. Такой контроль полезен на определенных стадиях способа нанесения, например, при опускании субстрата 114 в суспензию или раствор покрытия.
На фиг. 3-5 показана контактная головка 18. Более конкретно, на фиг. 3 показан вид на разобранную контактную головку, а на фиг. 4 и 5 показан вид нижней поверхности контактной головки с находящейся на ней матрицей датчиков. Контактная головка 18 содержит заменяемую захватывающую конструкцию 34, движущие компоненты 39 и матрицу датчиков 38 выдающуюся из ее нижней поверхности 32. Захватывающая конструкция 34 называется заменяемой, поскольку одну захватывающую конструкцию 34 можно снять и заменить на другую захватывающую конструкцию 34, имеющую другие характеристики. Возможность замены захватывающей конструкции 34 делает контактную головку 18 более гибкой и надежной.
К движущим компонентам 39 относится единый силовой привод, представляющий собой пневмоцилиндр 40, соединенный в настоящей реализации с линией подачи воздуха (не показана), движущая пластина 42 и множество движущих штырей 44. Движущая пластина 42 располагается между пневмоцилиндром 40 и движущими штырями 44 и равномерно передает силовое воздействие, оказываемое пневмоцилиндром 40, на движущие штыри 44. Таким образом, движущая пластина 42 позволяет с помощью одного пневмоцилиндра 40 равномерно и одновременно оказывать давление на все движущие штыри 44, тем самым синхронно выдвигая и втягивая эти движущие штыри 44, а следовательно, и захватывающие штыри 30. Выдвигание и втягивание захватывающих штырей 30 будет рассмотрено ниже более подробно. Движущие штыри 44 одинаковы, имеют оконтуренный наконечник 46 и крепятся к нижней стороне движущей пластины 42 таким образом, что все штыри 44 выдвигаются из движущей пластины 42 на одно и то же расстояние. Таким образом, движущие штыри 44 могут равномерно и одновременно приводить в движение множество компонентов захватывающей конструкции 34. Хотя захватывающая конструкция 34 является заменяемой, движущие компоненты 39 имеют такую конструкцию, которая позволяет им использоваться с любой захватывающей конструкцией 34, устанавливаемой на контактную головку 18. Понятно, что для создания требуемого усилия могут использоваться самые различные движущие компоненты.
Матрица датчиков 38, показанная на фиг. 4, включает пять пар датчиков, а матрица датчиков 38, показанная на фиг. 5, включает семь пар датчиков. Предпочтительная матрица датчиков 38 включает семь пар датчиков. Каждая пара имеет приемник 50 и излучатель 52. Пары датчиков расположены таким образом, что излучатели 52 передают сигналы в разных направлениях, чтобы предотвращать непреднамеренное попадание на приемник 50 сигнала от несоответствующего излучателя 52, т.е. от излучателя 52, не составляющего с данным приемником пару. Более конкретно, четыре излучателя 52 расположены на одной стороне контактной головки 18, а три излучателя 52 расположены на противоположной стороне контактной головки 18. Приемник 50 для каждого из излучателей 52 расположен на стороне контактной головки 18, противоположной от соответствующего ему излучателя 52. Датчики 50, 52 расположены так, чтобы отправляемые и принимаемые сигналы пересекали контактную головку 18 в зоне, где находится субстрат 114 (показанный на фиг. 12), если субстрат 114 захвачен. Матрица датчиков 38 дает контактной головке 18 возможность определять множество рабочих характеристик, относящихся к субстрату 114, включая, в том числе, захвачен ли субстрат 114, поднят ли субстрат 114, равномерно ли поднят субстрат 114 и отпущен ли субстрат 114. Следует учитывать, что могут применяться различные расположения пар датчиков и любое их количество, но предпочтительной является конфигурация, показанная на фиг. 5.
На фиг. 6 показан вид разобранной захватывающей конструкции, а на фиг. 7 показана собранная захватывающая конструкция со снятым с нее монтажным блоком для иллюстрации расположения приводных педалей в углублении накрывающей пластины. Захватывающая конструкция 34 включает накрывающую пластину 54 имеющую прямоугольную центральную часть 56 и периферическую стенку 58, которая возвышается по периферии пластины. Накрывающая пластина 54 имеет внутреннюю поверхность 60 и внешнюю поверхность 62 (вероятно, лучше всего она видна на фиг. 3), которые обе являются плоскими, за исключением нескольких углублений 64, сделанных во внутренней поверхности 60 накрывающей пластины 54. На накрывающей пластине 54 также имеется пара крепежных петель 66, расположенных, по существу, перпендикулярно краю периферической стенки 58. Крепежные петли 66 находятся на противоположных сторонах накрывающей пластины 54 и используются для соединения накрывающей пластины 54 с контактной головкой 18. Крепежные петли 66 могут иметь разное расположение и форму.
Хотя наличие нескольких углублений 64 во внутренней поверхности 60 накрывающей пластины 54 является предпочтительным, накрывающая пластина 54, имеющая единственное углубление 64 во внутренней поверхности 60, также подпадает под действие настоящего изобретения. Следует учитывать, что разные захватывающие конструкции 34 могут иметь разные характеристики, например количество углублений 64 в накрывающей пластине 54. Как, вероятно, лучше всего видно на фиг. 9, накрывающая пластина 54 имеет толщину, позволяющую сделать углубления 64 в ее внутренней поверхности 60, например, без проникновения или нарушения плоскости наружной поверхности 62 пластины 54. Форма, размер и глубина углублений 64 позволяют вставить в углубление 64 монтажный блок штырей 68. Конкретная конфигурация накрывающей пластины 54, углублений 64, внутренней поверхности 60 и внешней поверхности 62 может варьироваться.
Количество создаваемых углублений 64, как правило, определяется размерами субстрата, захватываемого и поднимаемого контактной головкой 18. Для субстрата размером 10,16 см на 10,16 см (4 на 4 дюйма) предпочтительно иметь четыре углубления 64 в накрывающей пластине 54. В случае субстратов меньшего размера можно использовать захватывающую конструкцию 34 с накрывающей пластиной 54, имеющей меньшее количество углублений 64.
На фиг. 8 и 9 представлены вид накрывающей пластины сверху и вид ее сбоку в разрезе соответственно. На фиг. 8 показана накрывающая пластина 54, имеющая четыре углубления 64. Чтобы лучше понять расположение углублений 64 (и деталей, находящихся в этих углублениях 64), представьте, что на накрывающую пластину 54 наложена декартова система координат, где точка начала координат (пересечения осей X и Y) приходится на центр накрывающей пластины 54. При этом накрывающая пластина 54 разделяется на четыре квадранта - верхний правый, верхний левый, нижний правый и нижний левый. Углубления 64 расположены по одному в каждом квадранте под углом 45° относительно центральной точки накрывающей пластины 54.
Каждое из углублений 64 содержит множество продолговатых отверстий или прорезей 70, сделанных в дне 72 углубления 64. Эти прорези 70 пронизывают насквозь накрывающую пластину 54 и, следовательно, также присутствуют на внешней поверхности 62 накрывающей пластины 54. В настоящей реализации каждое углубление 64 имеет четыре прорези 70 в днище 72, которые видны со стороны внешней поверхности 62 пластины 54 как четыре прорези 70, расположенные в каждом из квадрантов внешней поверхности 62.
Прорези 70 имеют одинаковую длину и располагаются на фиксированном расстоянии одна от другой параллельно друг другу. Предпочтительно, чтобы концы соседних прорезей 70 были немного смещены относительного друг друга таким образом, чтобы концы прорезей 70 находились на одной линии попеременно. Линии, по которым выравниваются прорези 70, лежат под углом 45° к углублению 64, в котором эти прорези сделаны. Расположение углублений 64 и прорезей 70 под углом полезно для того, чтобы штыри 30 захватывающей конструкции 34, располагающиеся в прорезях 70 в ходе захвата, зацепляли и тянули субстрат 114, не деформируя и не повреждая этот субстрат 114.
Количество прорезей 70 в углублении 64 может изменяться и определяется на основе физических характеристик захватываемого субстрата. Для настоящего субстрата 114 (показанного на фиг. 12) предпочтительным являются четыре прорези 70 в углублении 64. Накрывающая пластина 54, имеющая одну, две или четыре группы прорезей, сделанных во внешней поверхности 62 пластины, попадает в сферу действия изобретения. Конфигурация прорезей 70 также может изменяться.
Как указывалось выше, каждое углубление 64 имеет конфигурацию, позволяющую вставить в него монтажный блок штырей 68. На фиг. 10A-10D показан монтажный блок штырей 68 с выборочно установленными приводными педалями 82 и держателями штырей 80. Монтажный блок штырей 68, как правило, имеет прямоугольную форму, где боковые стенки 76 длиннее торцевых стенок 78 (см. фиг. 6). Блок 68 имеет центральную монтажную зону для установки множества держателей штырей 80 (вероятно, лучше всего видны на фиг. 10C) и пары подпружиненных L-образных приводных педалей 82. Педали 82 передают движущее усилие, создаваемое движущим штырем 44 (показан на фиг. 3) на держатели штырей 80, на которых находятся штыри 30, используемые для захвата субстрата 114.
В каждой из боковых стенок 76 блока 68 сделан наклонный длинный паз 84 для установки наклонной направляющей планки 86 одной из приводных педалей 82. Пазы 84 ориентированы под противоположными углами друг к другу, чтобы приводные педали 82 могли перемещаться в направлении вниз и друг от друга при прикладывании к ним направленного вниз усилия с помощью движущего штыря 44. Кроме того, в торцевых стенках 78 блока 68 имеются углубления 88 для пружин, сделанные для установки пружин сжатия (не показаны), применяемых для отталкивания педалей 82 в оттянутое положение.
Каждая приводная педаль 82 имеет торцевую часть 92 и боковую часть 94 (показаны на фиг. 7). Кроме того, одним своим концом каждая из частей 92, 94 неподвижно соединена с другой частью, т.е. один конец торцевой части 92 соединен с одним концом боковой части 94, в результате чего педаль 82 имеет L-образную форму и каждая из частей 92, 94 имеет свободный конец, т.е. конец, не соединенный неподвижно с другой частью. Если педали 82 располагаются в монтажном блоке 68, то боковые части 94 педалей 82 совпадают с боковыми стенками 76 монтажного блока 68, а торцевые части 92 педалей 82 совпадают с торцевыми стенками монтажного блока 68. Каждая педаль 82 имеет верхнюю поверхность 96 и нижнюю поверхность 98 (вероятно, лучше всего видные на фиг. 3), причем нижняя поверхность 98 направлена в сторону днища 72 (показано на фиг. 8) углубления 64, внутрь которого устанавливается педаль 82 (показано на фиг. 7), а верхняя поверхность 96 направлена от днища 72 углубления 64, в которое устанавливается педаль 82. Каждая боковая часть 94 имеет наклонную направляющую планку 86 (показана на фиг. 6), выдающуюся наружу от внешней поверхности 100 (показана на фиг. 7) боковой части 94. Эта наклонная направляющая планка 86 образует скользящий контакт с наклонным пазом 84 (показан на фиг. 6), сделанным в соответствующей боковой стенке 76 (показана на фиг. 6) монтажного блока 68.
В каждой торцевой части 92 имеется центральное углубление в виде паза 102 (вероятно, лучше всего видное на фиг. 3) в нижней поверхности 98. Этот паз 102 придает нижней поверхности торцевой части такую форму, которая определяется двумя плечами одинаковой длины 104, разделенными центральным пазом 102. Платформа для установки держателя штырей 74 (показана на фиг. 3 и 10A-10C) отходит под прямым углом от каждого из плеч 104 (показано на фиг. 3 и 10A-10C). Платформы для установки держателей штырей 74 имеют на дистальных концах монтажные отверстия 112 для крепления держателей штырей 80.
Кроме того, в каждой торцевой части 92 (показана на фиг. 7) имеется углубление 106 для установки пружины, сделанное в ее внешней поверхности 100. Углубления для пружин 106 в педалях 82 находятся на одной линии с углублениями для пружин 88 (показаны на фиг. 6) монтажного блока 68. Пружины сжатия располагаются в парах углублений 88 (фиг. 6), 106 (фиг. 7). Пружины смещают педали 82 в оттянутое положение, при котором торцевые части 92 располагаются на максимальном расстоянии от торцевых стенок 78, с которыми указанные торцевые части 92 имеют общую пружину. Это максимальное расстояние определяется свободными концами боковых частей 94, упирающимися в противоположные торцевые стенки 78 монтажного блока 68. Каждая торцевая часть 92 также имеет наклоненную внутрь внутреннюю поверхность 108, предназначенную для приема оконтуренного наконечника 46 движущего штыря 44 (показан на фиг. 3).
Педали 82 расположены в монтажном блоке 68 направленными в противоположные относительно друг друга стороны, чтобы наклонные внутренние поверхности 108 торцевых частей 92 были обращены в противоположные относительно друг друга стороны так, чтобы свободный конец торцевой части 92 одной педали 82 примыкал к промежуточному участку боковой части 94 другой педали 82.
Педали 82 (показаны на фиг. 7 и 10D) смещаются пружиной в оттянутое положение, при котором наклонные внутренние поверхности 108 (показаны на фиг. 7 и 10D) торцевых частей 92 почти примыкают друг к другу. Кроме того, в оттянутом положении внешняя поверхность 100 (показана на фиг. 7) каждой торцевой части 92 находится на самом большом расстоянии от торцевой стенки блока 78 (показано на фиг. 10D), с которой у нее есть общая пружина.
В оттянутом положении внутренние поверхности боковых частей 108 (показанные на фиг. 7 и 10D) образуют угловидный профиль, соответствующий оконтуренной форме наконечника 46 движущего штыря 44 (показан на фиг. 3), который используется для перемещения педалей 82 в выдвинутое положение. Если наконечник 46 движущего штыря 44 надавливает на внутренние поверхности 108, то наклонные направляющие планки 86 (показанные на фиг. 3 и 7) педалей 82 движутся вниз и наружу в скользящем контакте с пазами 84 (показаны на фиг. 3 и 6) и двигают педали 82 в направлении вниз и друг от друга. Следовательно, педали 82 перемещаются вниз, в сторону днища 72 (показано на фиг. 8) углубления 64, в которое они установлены, и перемещаются друг от друга. Педали 82 (показанные на фиг. 7) скользят друг от друга по скользящему контакту между наклонными планками 86 педалей 82 и наклонными пазами 84 монтажного блока 68. При надавливании движущим штырем 44 (показан на фиг. 3) вниз, педали 82 (показанные на фиг. 3 и 7) раздвигаются до тех пор, пока наружные поверхности 100 (показаны на фиг. 6 и 7) торцевых частей 92 не упрутся в торцевые стенки 78 блока 68. В этот момент педали 82 находятся в выдвинутом положении. Движущие штыри 44 (показаны на фиг. 3) удерживают педали 82 в выдвинутом положении, преодолевая силу пружин сжатия, позволяя педалям 82 оставаться в выдвинутом положении. Если давление с движущего штыря 44 снимается, то пружины сжатия перемещают педали 82 обратно в оттянутое положение.
Как упоминалось выше, приводные педали 82 (фиг. 10A-C) имеют платформы для установки держателей штырей 74, на которые можно установить множество держателей штырей 80. На фиг. 11 показан держатель штырей 80 с установленными на нем штырями 30. На держатель штырей 80 установлено в ряд множество игл или штырей 30, причем штыри 30 выдаются из одной поверхности держателя. Держатель штырей 80 также имеет на одном своем конце крепежную петлю 110 для крепления держателя 80 к соответствующей движущей педали 82.
Штыри 30 крепятся в держателе 80 под фиксированными углами в диапазоне от 15° до 45°. Все штыри 30 держателя 80 крепятся под одним углом и в одном направлении. Угол установки штырей, применяемый для конкретного субстрата, определяется на основе жесткости данного субстрата. Для описанного в настоящем документе субстрата 114 предпочтительным является угол установки штырей 28°.
На фиг. 11 показан держатель штырей 80 с пятью установленными на нем штырями 30. Как и угол установки штырей, количество штырей 30, устанавливаемых в каждый держатель 80, может изменяться, однако для данного субстрата предпочтительным является установка пяти штырей 30 в держатель 80.
Держатели штырей 80 располагаются в монтажном блоке штырей 68, примыкая друг к другу. Они устанавливаются на монтажные платформы держателей 74 таким образом, чтобы углы установки штырей в соседних держателях 80 были обратно симметричны, т.е. если угол установки штырей 30 держателя 80 ориентирован в одном направлении, то соседний держатель 80 устанавливается в монтажный блок 68 так, чтобы углы установки штырей 30, установленных на второй держатель 80, были ориентированы в противоположном направлении относительно угла установки штырей первого держателя 80. Совокупность штырей 30, установленных в один монтажный блок 68, представляет собой набор штырей, следовательно, в конкретной контактной головке количество монтажных блоков штырей 68 равно количеству наборов штырей.
В описанной в настоящем документе реализации используются по четыре держателя штырей 80 в каждом монтажном блоке 68. Следовательно, в двух держателях 80 угол установки штырей имеет одно направление, а в двух других держателях 80 угол ориентирован в противоположном направлении, причем эти держатели 80 располагаются в монтажном блоке штырей 68 чередующимся образом. Кроме того, держатели штырей 80 расположены таким образом, что концы держателей 80 с углами установки штырей, ориентированными в одном направлении, выровнены относительно друг друга и немного смещены относительно концов держателей 80 с углами установки штырей, ориентированными в противоположном направлении. Такое расположение со смещением является результатом расположения педалей 82, к которым прикреплены держатели 80, в монтажном блоке 68.
Если рассматривать движение держателей штырей 80, то держатели 80 с углами установки штырей, ориентированными в одном направлении, приводятся в движение одной приводной педалью 82. Соответственно, два держателя 80 приводятся в движение одной приводной педалью 82, т.е. педалью 82, к которой эти держатели 80 прикреплены, а два других держателя 80 приводятся в движение второй приводной педалью 82, т.е. педалью 82, к которой прикреплены эти два держателя 80. Вследствие чередующегося расположения держателей 80, педали 82 движут те два держателя 80, которые разделены другим, промежуточным держателем 80, а не два смежных друг с другом держателя 80. При такой конфигурации требуется, чтобы педали 82 оставляли место, т.е. не оказывали давления на промежуточный держатель 80, движение которого они не осуществляют. Поэтому держатели 80 и педали 82 расположены в монтажном блоке 68 таким образом, чтобы промежуточный держатель каждой педали 82 располагался в вырезном пазу 102 педали 82. Держатели штырей 80 крепятся к педали 82, которая их движет. Если педали 82 двигаются в направлении вниз и друг от друга, то же происходит с держателями 80, которые к ним прикреплены.
Монтажные блоки штырей 68 устанавливаются в углубления 64 накрывающей пластины так, что верхние поверхности 96 приводных педалей 82 направлены противоположно дну 72 углублений 64, а штыри 30 в держателях 80 направлены в сторону дна 72 углублений 64. Монтажные блоки штырей 68 расположены в углублениях 64 так, чтобы держатели 80 совпали с множеством прорезей 70, находящихся в углублениях 64. Прорези 70 сделаны так, чтобы через них проходили штыри 30, находящиеся на держателях 80, причем каждая прорезь 70 совпадает с одним держателем штырей 80 монтажного блока 68. Следовательно, количество держателей штырей 80 в монтажном блоке штырей 68 равно количеству прорезей 70 в углублении 64. Размер штырей 30 позволяет им проходить сквозь прорези 70 и выходить наружу из внешней поверхности 62 накрывающей пластины 54, когда держатели 80 переводятся в выдвинутое положение. Ширина прорезей 70 составляет от 101% до 110% диаметра штырей 30, а предпочтительная ширина прорези составляет 105% диаметра штыря.
Штыри 30 предпочтительно выдвигаются из внешней поверхности 62 накрывающей пластины 54 приблизительно на 0,0508 см (0,02 дюйма). Штыри 30 и их конфигурация (включая количество и угол установки) сконструированы так, чтобы захватывать волокна материала 116 субстрата 114, как показано на фиг. 12. Более конкретно, желательно, чтобы штыри 30 не протыкали и не проникали сквозь субстрат 114, а захватывали волокна материала 116, выдающиеся из поверхности субстрата 114. Захват субстрата 114 за волокна 116 позволяет поднимать и сбрасывать субстрат 114 без деформации и повреждения субстрата 114.
Штыри 30 могут втягиваться обратно через прорези 70, благодаря перемещению держателей 80 в оттянутое положение. Держатель штырей 80 оттягивается в результате того, что движущие штыри 44 снимают давление с приводных педалей 82, позволяя, таким образом, пружинам сжатия сместить приводные педали 82 в оттянутое положение. Если держатель 80 оттянут, то установленные на нем штыри 30 нисколько не выдаются из внешней поверхности 62 накрывающей пластины 54. На самом деле предпочтительно, чтобы штыри втягивались по меньшей мере (но без ограничений изобретения) на 1,5 мм под внешнюю поверхность 62 накрывающей пластины 54. Если штыри 30 оттягиваются от волокон 116 субстрата 114 (показано на фиг. 12), то субстрат 114 отделяется от контактной головки 18. Полное втягивание штырей 30 под внешнюю поверхность 62 накрывающей пластины 54 помогает освободить штыри 30 от субстрата 114.
Ряд конструктивных особенностей контактной головки 18 подбирается так, чтобы эта головка 18 могла захватывать, удерживать и сбрасывать пористый, а возможно и тонкий субстрат таким образом, чтобы он оставался в ходе подъема или освобождения относительно ровным, без провисания углов или центра. Также от размера и формы субстрата зависит выбор количества монтажных блоков штырей 68 (и, следовательно, наборов штырей) и углублений 64 в накрывающей пластине 54, их положение и размещение на пластине 54, а также их ориентация. Для образца субстрата 114 размером 10,16 см на 10,16 см (четыре на четыре дюйма), как правило, предпочтительным являются четыре монтажных блока штырей 68 и четыре соответствующих углубления 64.
Количество штырей 30 в ряду, угол, под которым установлены штыри 30 и количество рядов штырей 30 в монтажном блоке 68, выбираются таким образом, чтобы обеспечивалось ровное поднятие и освобождение субстрата 114. На способность субстрата оставаться ровным при подъеме и освобождении влияет его жесткость. Следовательно, для определения упомянутых конструкционных особенностей контактной головки 18 измеряют жесткость субстрата. Жесткость субстрата можно измерить, захватив субстрат за центр и измерив угол, под которым провисают концы. Чем больше угол провисания, тем больше штырей 30 требуется для подъема субстрата. Для субстрата ОРЦ/PG910 114, как правило, предпочтительно иметь пять штырей 30 в ряду и четыре ряда в монтажном блоке 68.
Было выявлено, что для субстрата ОРЦ/PG910 114 размером 10,16 см на 10,16 см (четыре на четыре дюйма) предпочтительное количество штырей 30 равно восьмидесяти. Таким образом, предпочтительно, чтобы захватывающая конструкция 34 включала пять штырей на 6,5 см2 (пять штырей на квадратный дюйм). Если захватывающая конструкция 34 включает более пяти штырей на квадратный дюйм, то субстрат 114 не сбрасывается должным образом при втягивании штырей. Также, если захватывающая конструкция 34 включает менее пяти штырей на квадратный дюйм, то субстрат 114 не захватывается равномерно. Для других субстратов количество штырей на квадратный дюйм может быть иным.
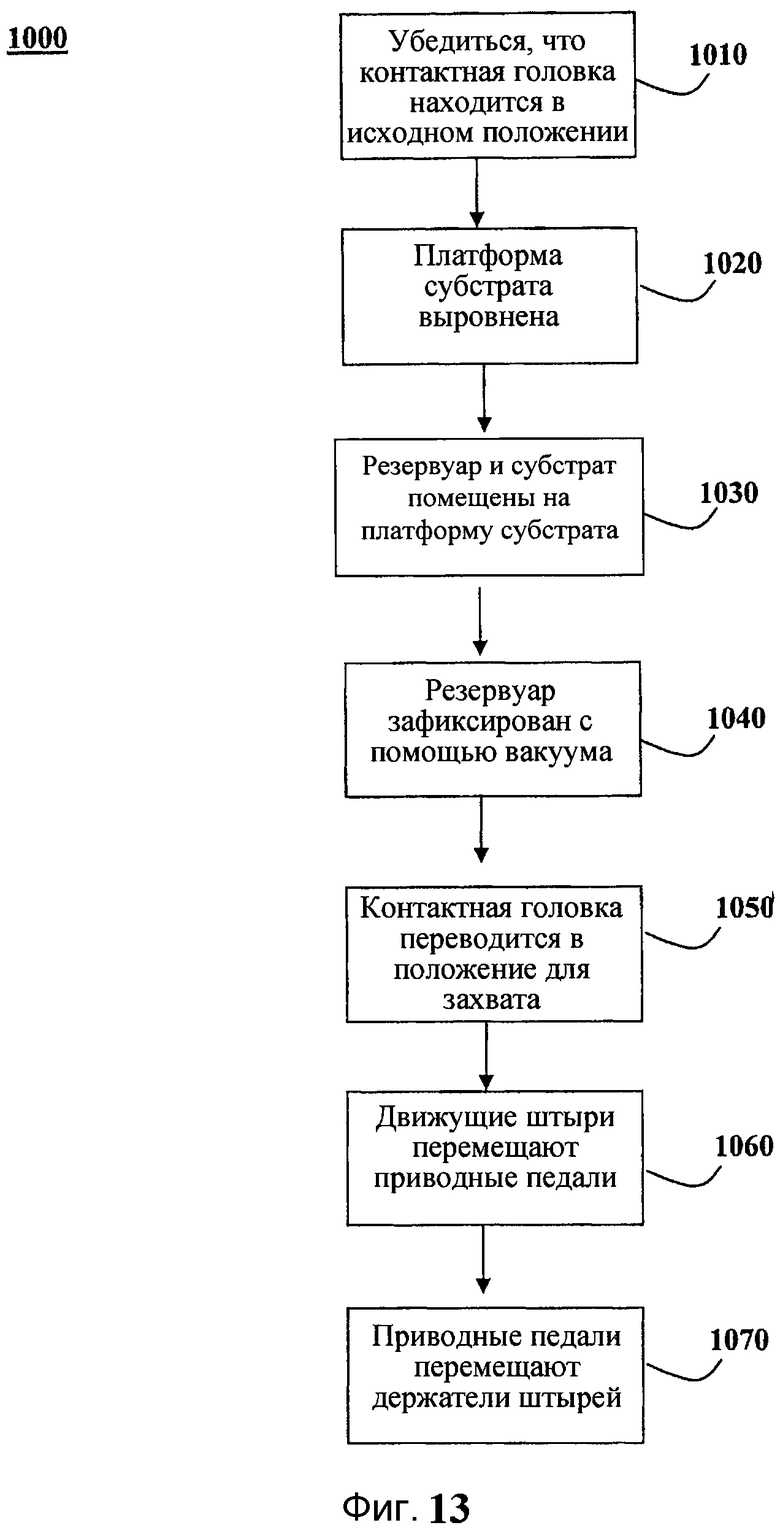
На практике устройство для нанесения покрытий 10 применяется для создания равномерного покрытия из жидкости на одной стороне пористого субстрата 114 в соответствии со способом нанесения 1000 (фиг. 13-17). Перед началом способа нанесения покрытия 1000 проверяется установка контактной головки 18 в исходное положение (шаг 1010). В исходном положении контактная головка 18 находится на произвольной высоте над платформой субстрата 14, чем создается некоторое рабочее пространство над платформой субстрата 14, позволяющее проводить манипуляции на платформе 14. Контактная головка 18 возвращается в исходное положение на период удаления и замены субстрата на платформе 14.
Кроме того, перед нанесением покрытия на субстрат следует выровнять устройство 10, для чего нужно выровнять платформу субстрата 14 (шаг 1020). Для выравнивания платформы 14 относительно поверхности, на которую она установлена, и относительно контактной головки 18 используются выравнивающие винты 26.
Выравнивание устройства 10 очень важно для обеспечения однородности получаемого фибринового пластыря. Выровненное устройство 10 позволяет в ходе нанесения покрытия удерживать субстрат 114 и суспензионную среду ровно и параллельно друг другу, чем обеспечивается равномерность нанесения биологических компонентов на субстрат 114. Если какая-либо часть субстрата 114 касается суспензии прежде остальных, это потенциально может привести к тому, что субстрат 114 будет в первую очередь впитывать суспензию в этом участке, что даст в итоге неравномерное распределение твердых веществ. Желательно, чтобы биологические компоненты откладывались на субстрате 114 равномерно, чтобы получался фибриновый пластырь с однородным распределением биологических компонентов.
После выравнивания платформы субстрата 14 резервуар для покрытия с находящимся в нем субстратом 114 устанавливают на рабочую поверхность 24 платформы субстрата 14 так, чтобы субстрат 114 располагался стороной с ОРЦ вверх (шаг 1030). Резервуар для покрытия надежно фиксируют на платформе субстрата 14 с помощью вакуума (шаг 1040).
После того как субстрат 114 размещен на платформе 14 и резервуар для покрытия зафиксирован на платформе 14, контактную головку 18 переводят в положение захвата. Положение захвата зависит от толщины захватываемого субстрата 114. Положение захвата выбирается так, чтобы штыри 30 выдвигались, например, приблизительно на 0,0254-0,0508 см (0,01-0,02 дюйма) в волокна 116 субстрата 114. Относительно толстый субстрат 114 будет подниматься более равномерно, если штыри 30 входят в волокна 116 на большую длину; следовательно, положение захвата для относительно толстого субстрата 114 будет ближе к субстрату 114, чем положение для захвата относительно тонкого субстрата 114. Как отмечалось выше, штыри 30 выдвигаются на 0,0508 см (0,02 дюйма) из внешней поверхности 62 контактной головки 18, следовательно, положение для захвата, как правило, составляет приблизительно 0,0508-0,0762 см (0,02-0,03 дюйма) над субстратом 114 в зависимости от толщины субстрата 114.
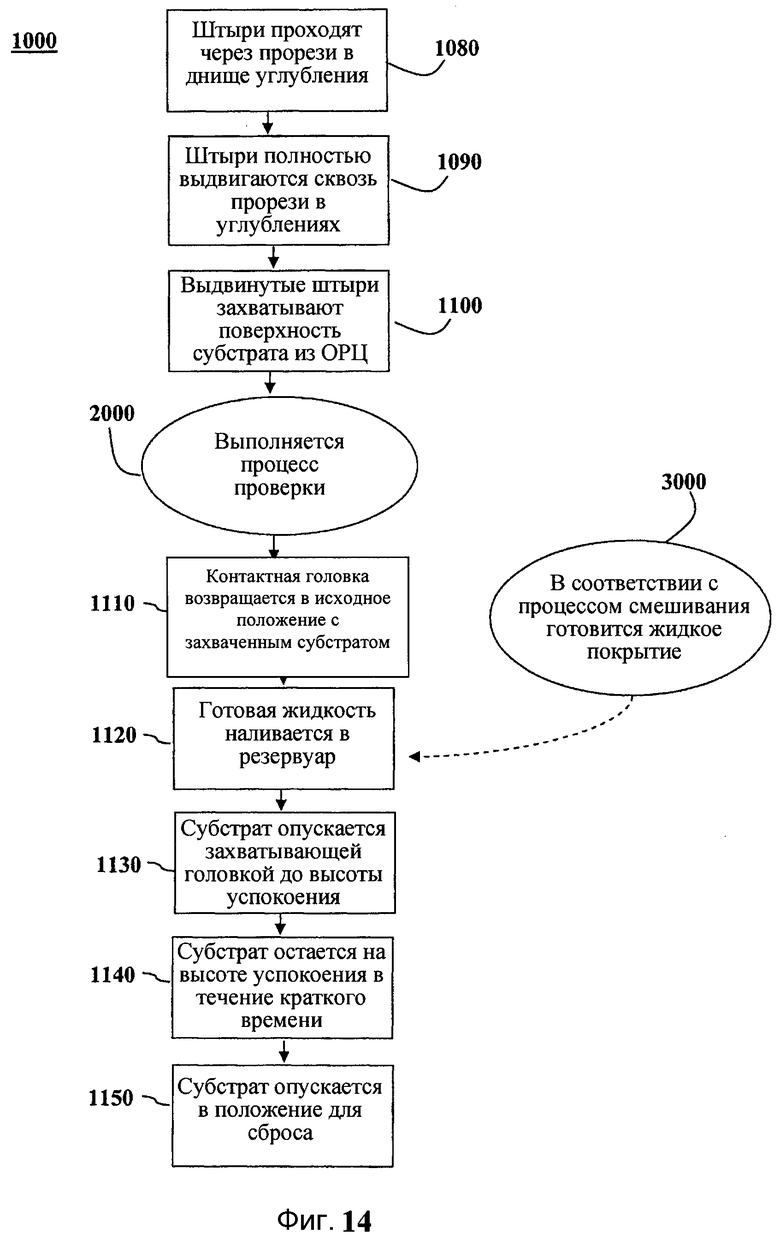
Когда контактная головка 18 находится в положении для захвата, на пневмоцилиндр 40 подается воздух, в результате чего движущие штыри 44 движутся вниз (шаг 1060). Движущие штыри 44 надавливают на приводные педали 82, в результате чего педали 82 скользят вниз и друг от друга по пазам 84 монтажного блока 68. Педали 82 смещают держатели штырей 80 вниз и друг от друга, таким образом, перемещая штыри 30 вниз и немного кнаружи от их исходного положения (шаг 1070). Штыри 30 совмещаются с прорезями 70 в углублениях 64 и по мере того, как держатели 80 движутся в сторону днищ 72 углублений 64, штыри 30 начинают проходить через прорези 70 (шаг 1080). Когда держатели штырей 80 достигают днищ 72 углублений 64, штыри 30 полностью выдвинуты из прорезей 70 накрывающей пластины 54 (шаг 1090).
Выдвинутые штыри 30 захватывают волокна 116 субстрата 114 (шаг 1100). Как говорилось выше, желательно, чтобы штыри 30 захватывали волокна 116 субстрата 114, не протыкая и не проходя сквозь субстрат 114, чтобы предотвратить деформацию или повреждение субстрата 114. Кроме того, захват лишь волокон 116 субстрата 114 позволяет полностью освободить субстрат 114 при втягивании штырей.
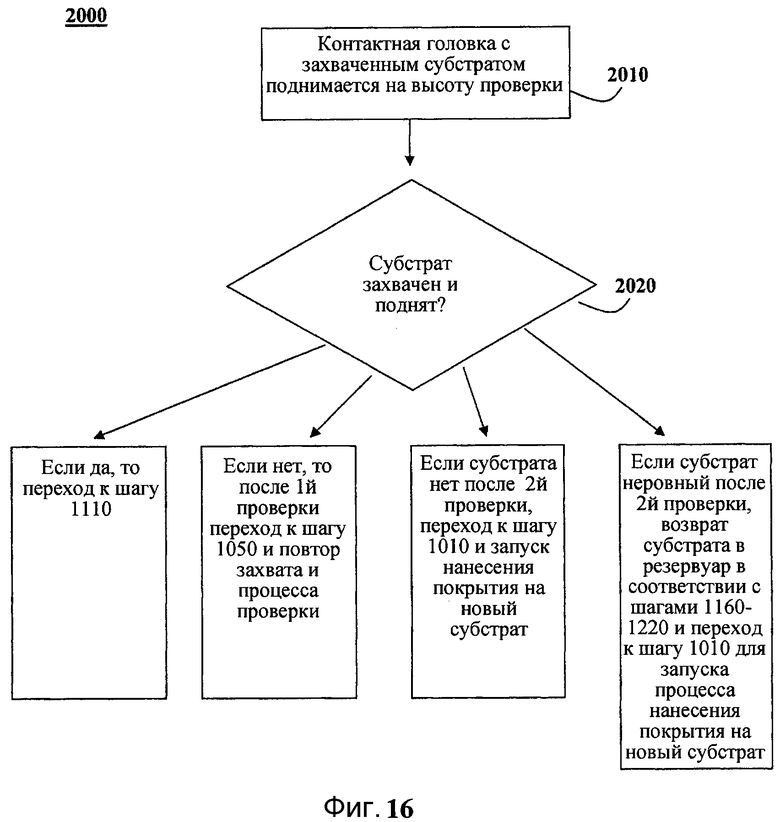
Также желательно, чтобы штыри 30 захватывали субстрат 114 ровно и равномерно, чтобы субстрат 114 поднимался и удерживался в ровном положении. Матрица датчиков 38 захватывающей конструкции 34 применяется для осуществления способа проверки 2000, при котором датчики 38 позволяют удостовериться, что субстрат 114 захвачен и поднят ровно. Матрица датчиков 38 также применяется для того, чтобы убедиться, что субстрат 114 полностью сброшен.
Способ проверки 2000 начинается с подъема захваченного субстрата 114 на высоту проверки. Более конкретно, после того, как субстрат 114 захвачен (или сочтен захваченным), контактная головка 18 поднимается на высоту проверки (шаг 2010), производится проверка наличия субстрата 114 и ровность субстрата 114 (шаг 2020).
Если субстрат 114 присутствует и поднят ровно, контактная головка 18 возвращается в исходное положение на шаге 1110. Если субстрат 114 не захвачен или если субстрат 114 захвачен, но поднят неровно, то контактная головка 18 возвращается в положение захвата на шаге 1050 и происходит переход к способу нанесения покрытия 1000. Если способ проверки 2000 повторяется для того же субстрата 114 второй раз, то способ 2000 будет несколько иным, если субстрат 114 не захвачен или поднят неровно. Если субстрат 114 оказывается не захваченным при второй проверке, контактная головка 18 возвращается в исходное положение на шаге 1010, чтобы начать способ нанесения покрытия с новым субстратом 114. Неверно захватываемый субстрат 114 снимается с платформы 14 и заменяется новым субстратом 114. Если субстрат 114 не поднимается ровно при второй проверке, то контактная головка 18 возвращает субстрат 114 в резервуар для покрытия, как описано в шагах 1160-1220, и переходит к шагу 1010, чтобы начать способ нанесения покрытия 1000 с новым субстратом 114.
После того как субстрат 114 захвачен равномерно, контактная головка 18 поднимает субстрат 114 в исходное положение (шаг 1110), тем самым извлекая субстрат 114 из резервуара для покрытия. Одновременно с захватом и подъемом субстрата 114 подготавливается жидкое покрытие в соответствии со способом смешивания 3000.
Для целей настоящего описания жидкое покрытие создается с использованием биологических компонентов, представляющих собой лиофилизированные измельченные порошки, полученные из жидких объединенных концентратов человеческого фибриногена и человеческого тромбина. Эти концентраты идентичны концентратам, используемым при производстве фибринового наполнителя второго поколения EVICEL™. Известно, что тромбин и фибриноген являются полезными средствами для процесса свертывания крови. Более конкретно, тромбин представляет собой фермент плазмы крови, катализирующий превращение фибриногена в фибрин, что является последним этапом процесса свертывания крови, а фибриноген представляет собой белок плазмы крови, необходимый для коагуляции и превращающийся в фибрин под действием тромбина в присутствии ионов кальция.
Примером растворителя, применяемого для суспендирования биологических порошковых компонентов, является гидрофторэфир (3M Novec 7000) (HFE). HFE имеет относительно высокую летучесть, следовательно, биологические компоненты остаются в форме суспензии в данном растворителе в течение относительно короткого времени. Чтобы при опускании субстрата в суспензию произошло создание покрытия, субстрат необходимо погрузить в суспензию в тот интервал времени, когда биологические компоненты суспендированы в растворителе.
Хотя в настоящем документе описывается пример жидкости для создания покрытия на субстрате, следует понимать, что описанная суспензия не является единственной возможной жидкостью для создания покрытий. Жидкость для создания покрытия может быть прозрачной, может иметь цвет или быть бесцветной. Кроме того, жидкость для создания покрытия может быть гомогенной однофазной жидкостью, образуемой из нескольких смешиваемых субстанций, и (или) может представлять собой эмульсии или сходные многофазные системы, в которых по меньшей мере одна фаза является жидкой при рабочей температуре или температуре использования, и где нерастворимые или частично растворимые частицы суспендированы в растворителе. Растворители могут быть водными или органическими и выбираются из спиртов с низкой температурой кипения, например, метанола, этанола и изопропанола, простых эфиров, ацетона, углеводородных растворителей, таких как пентаны, гептаны, гексаны и октаны, галогенированных растворителей, таких как хлороформ, хлористый метилен, тетрахлоруглерод, трихлорэтилены, фторхлоруглероды, эфиры и перфтористые растворители, например, ранее описанные и имеющиеся в продаже под торговым наименованием 3M Novec. Приведенный выше список не является исчерпывающим списком всех возможных растворителей. Можно выбрать конкретную жидкость или сочетание жидкостей, которое обеспечит равномерное распределение жидкой фазы по образцу материала субстрата.
Что касается приготовления соответствующей примеру жидкости для создания покрытия, то заданная масса порошка фибриногена (BAC2) и заданная масса образца тромбина вводились в контейнер для перемешивания (шаги 3010 и 3020, соответственно). Предпочтительно, чтобы контейнер для перемешивания представлял собой пробирку Налген (Nalgene), размер которой выбирается в зависимости от объема приготовляемой суспензии. Отмеренный объем HFE добавляли к порошкам BAC2 и тромбина (шаг 3030) и перемешивали с помощью вихревой мешалки (шаг 3040). Объем растворителя может быть таким, чтобы в суспензии весовое отношение твердых компонентов к жидкости составляло от приблизительно 1 до 15%, предпочтительно, от приблизительно 5 до 10%.
Возвращаясь к способу нанесения покрытия 1000, жидкость далее заливается в пустой резервуар для покрытия (шаг 1120), и субстрат 114 сразу же быстро перемещается с помощью контактной головки 18 до высоты успокоения и краткое время удерживается в этом положении (шаг 1130). Высота успокоения - это произвольная высота над платформой субстрата 14, которая определяется в зависимости от положения освобождения. Высота успокоения представляет собой промежуточное положение, в котором субстрат 114 может удерживаться с целью снижения внешних влияний перед нанесением на него покрытия. Высота успокоения может варьировать от приблизительно 0,1 до 50 мм, предпочтительная высота успокоения составляет от приблизительно 2 мм до 30 мм, а более предпочтительная высота успокоения составляет от приблизительно 7 мм до 10 мм. Субстрат удерживается на высоте успокоения в течение относительно короткого промежутка времени, который в настоящем документе именуется временем успокоения. Время успокоения позволяет угаснуть остаточным эффектам движения, например, вибрациям субстрата, возникшим при перемещении до высоты успокоения, или волнообразным движениям жидкости после налива. Время успокоения может изменяться от приблизительно 1 секунды до 120 секунд, а предпочтительно составляет от приблизительно 2 до 15 секунд.
В том, что касается нанесения на субстрат 114 покрытия с фибриногеном и тромбином, желательно отпускать субстрат 114 в суспензию как можно быстрее, однако также желательно устранить внешние влияния, возникающие вследствие быстрого перемещения субстрата 114 из исходного положения в положение освобождения. Следовательно, субстрат 114 очень быстро перемещается до высоты успокоения (шаг 1130), после чего дается краткое время, время успокоения, чтобы рассеялись воздушные потоки, циркулирующие вокруг субстрата 114, и чтобы субстрат 114 снова стал ровным (шаг 1140).
Далее субстрат 114 относительно медленно перемещается с высоты успокоения в положение освобождения (шаг 1150). Положение освобождения представляет собой положение, при котором нижняя поверхность субстрата 114 слегка касается суспензии в резервуаре для создания покрытия. Положение освобождения определяется в зависимости от глубины суспензии в резервуаре. Глубина суспензии в резервуаре вычисляется на основании объема резервуара и объема суспензии, залитой в резервуар.
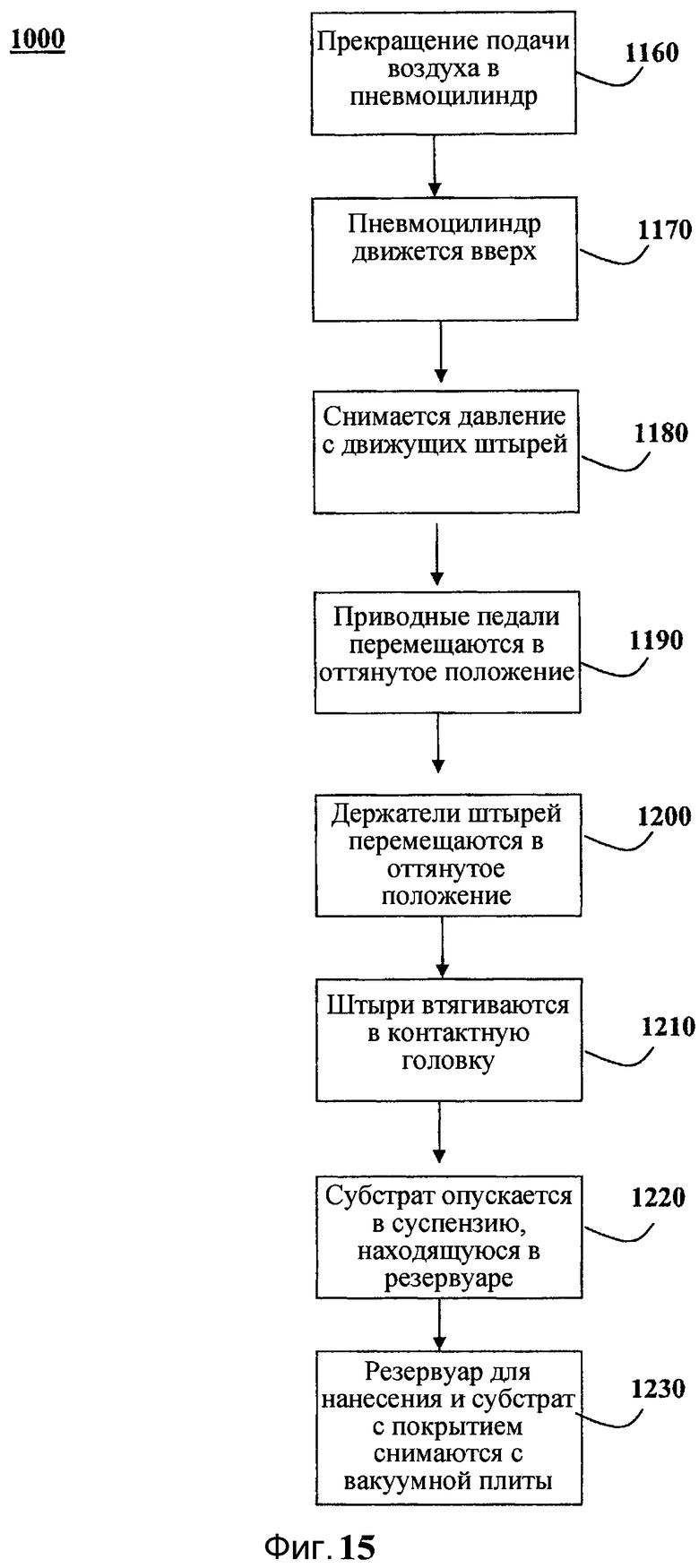
Когда субстрат 114 находится в положении освобождения, штыри 30 втягиваются обратно в контактную головку 18. В частности, для втягивания штырей 30 и возврата держателей 80 в оттянутое положение прекращают подачу воздуха в пневмоцилиндр 40 (шаг 1160), в результате чего пневмоцилиндр 40 движется вверх от платформы субстрата 14 (шаг 1170), снимая, таким образом, давление с движущих штырей 44 (шаг 1180). После снятия давления с движущих штырей 44 подпружиненные приводные педали 82 перемещаются в оттянутое положение (шаг 1190), передвигая в оттянутое положение также и держатели штырей 80 (шаг 1200). Когда держатели 80 переходят в оттянутое положение, штыри 30 втягиваются через прорези 70 таким образом, что указанные штыри 30 совершенно не выступают из внешней поверхности 62 контактной головки 18 (шаг 1210). После втягивания штырей 30, субстрат 114 сбрасывается в суспензию, которая налита в резервуар для покрытия (шаг 1220). В этот момент в суспензию погружается одна из сторон субстрата 114. После того как субстрат 114 опущен в суспензию, резервуар для покрытия, в котором находится субстрат 114, снимается с платформы субстрата 14 (шаг 1230), и способ нанесения покрытия 1000 можно начинать с новым субстратом 114.
Контролируемый способ погружения 1000 является предпочтительным в силу многих причин. Неотъемлемым преимуществом автоматизированного способа является потенциальное уменьшение количества брака в результате уменьшения количества действий со стороны оператора, что приводит к увеличению общего выхода продукции.
Исключить производимые человеком манипуляции из способа нанесения покрытия весьма желательно для повышения эффективности способа и уменьшения воздействия на человека порошкообразных биологических компонентов и растворителя, входящего в состав суспензии. Кроме того, автоматизация способа и изолирование зоны нанесения покрытия снижает потенциальный риск загрязнения.
Также данный способ нанесения улучшает характеристики получаемого фибринового пластыря. Считается, что способ нанесения влияет на такие характеристики производимого фибринового пластыря, как равномерность дозирования препарата, фармацевтическая привлекательность, т.е. внешний вид, а также способность крошиться, т.е. на характеристики, связанные с обращением с пластырем. Равномерность дозирования напрямую влияет на функциональные характеристики фибринового пластыря, такие как остановка кровотечения и адгезия к ткани. Кровоостанавливающий потенциал пластыря зависит от таких активных компонентов, как фибриноген и тромбин, следовательно, важно, чтобы эти биологические компоненты были равномерно распределены по всему субстрату. Наряду с равномерностью дозирования, на фармацевтическую привлекательность фибринового пластыря напрямую влияет распределение твердых биологических компонентов по всей основе субстрата. В частности, неравномерное распределение твердых компонентов по поверхности, а также неравномерное их проникновение в структуру субстрата отрицательно влияют на физическую привлекательность и потенциальную биологическую эффективность продукта. Субстрат должен захватывать частицы биологического порошка, чтобы они не отделялись в ходе обычной эксплуатации и нанесения на рану. На склонность изделия терять частицы, т.е. на способность крошиться, по-видимому, влияет не только распределение частиц по поверхности, но и их проникновение внутрь субстрата. Описанный способ нанесения покрытия увеличивает в фибриновом пластыре равномерность дозирования и фармацевтическую привлекательность и снижает способность крошиться, так как субстрат помещается в жидкое покрытие так, что жидкость покрывает поверхность субстрата равномерным гладким слоем и эффективно проникает в субстрат.
Изобретение иллюстрируют, но ни в коей мере не ограничивают, приведенные ниже примеры.
Пример 1
Было желательно выяснить, можно ли покрыть субстрат из нетканого материала суспендированными порошками путем ручного погружения его в суспензию.
Суспензию готовили путем смешивания 1,7 г первого биологического порошка и 0,3 г второго биологического порошка с 12 мл хлористого метилена, итоговая концентрация твердых компонентов в растворителе 6%, и перемешивания полученной смеси. Первый биологический порошок получали из белков плазмы путем криопреципитации, и он содержал фибриноген, альбумин, иммуноглобулин, фибронектин, фактор фон Виллебранда (vWF), фактор VIII, фактор XIII и вспомогательные вещества. Приблизительный состав первого биологического порошка в процентах от общего содержания сухих веществ был следующим: 40% фибриноген, 5% фибронектин, 13% в совокупности, альбумин и иммуноглобулин приблизительно 1% в совокупности, факторы VIII, XIII и vWF, остальное - вспомогательные вещества. Второй биологический порошок содержал альбумин, тромбин, кальций, стабилизаторы и вспомогательные вещества. Приблизительный состав второго биологического порошка в процентах от общего содержания сухих веществ был следующим: 15% альбумин, приблизительно 1% тромбин, остальное - кальций, стабилизаторы и вспомогательные вещества. Полученную суспензию вылили в приемный лоток размером 10,8×10,8 см (4,25×4,25 дюйма). Образец субстрата из нетканого материала ОРЦ-PG910 размером 10,16×10,16 см (4×4 дюйма) вручную опускали в лоток, содержащий суспендированные биологические порошки. После испарения растворителя субстрат проанализировали визуально и обнаружили равномерное покрытие из биологических порошков на той поверхности субстрата, которая первой вступила в контакт с суспензией.
Пример 2
Было желательно определить количество порошка, оставшегося на субстрате из нетканого материала, вручную помещенном в суспензию биологических порошков в метил-перфторпропиловом эфире
Суспензию, содержащую биологические порошки, по составу сходные с порошками из примера 1, готовили в контейнере из нержавеющей стали размером 5,72×5,72 см (2,25×2,25 дюйма). Первый и второй биологические порошки добавляли в контейнер из нержавеющей стали в количестве 0,4 г и 0,06 г соответственно. Метилперфторпропиловый эфир (HFE7000) смешивали с биологическими порошками в контейнере из нержавеющей стали так, чтобы относительная массовая доля порошка составляла приблизительно 6%. Контейнер подвергали обработке ультразвуком для создания гомогенной дисперсии частиц в HFE7000. Предварительно взвешенный образец субстрата из нетканого материала ОРЦ-PG910 размером 5,08×5,08 см (2×2 дюйма) вручную помещали в контейнер из нержавеющей стали так, чтобы все четыре края субстрата одновременно коснулись суспензии. Субстрат был равномерно покрыт порошком без пропусков каких-либо участков. Количество порошка, задержанного субстратом, измеренное путем взвешивания субстрата до и после нанесения покрытия, лежало в диапазоне 92,7-97,4%.
Пример 3
Было желательно определить влияние плотности суспензии на удержание твердого вещества в субстрате из нетканого материала, вручную помещенном в суспензию биологических порошков в метил-перфторпропиловом эфире.
Суспензии фибриногена и тромбина в HFE7000 готовили путем смешивания порошков в пробирке с растворителем при относительной массовой доле порошка в растворителе 5,9% (2 образца), 7,6% и 15,0%, соответственно. Заранее взвешенные образцы субстрата из нетканого материала ОРЦ-викрил размером 10,16×10,16 см (4×4 дюйма) вручную помещали в лотки размером 10,8×10,8 см (4,25×4,25 дюйма), содержащие суспензии твердых компонентов. Помещать субстрат в лоток старались ровно, чтобы все края субстрата коснулись жидкого покрытия одновременно. Дали растворителю возможность испариться из лотка, после чего визуально проанализировали каждый образец на покрытие порошком, т.е. на равномерность покрытия, а также взвесили. Количество твердого вещества определяли как разницу между результатами взвешивания до и после нанесения покрытия. В одном из субстратов, покрытых суспензией с массовой долей твердых веществ 5,9%, удержание твердого вещества составило 91,3%, в другом субстрате, покрытом суспензией с массовой долей твердых веществ 5,9%, удержание твердого вещества составило 90,8%; в субстрате, покрытом суспензией с массовой долей твердых веществ 7,6%, удержание твердого вещества составило 87,8%, а в субстрате, покрытом суспензией с массовой долей твердых веществ 15%, удержание твердого вещества составило 84,4%. Все эти результаты приведены в таблице 1 и графически представлены на фиг. 18. Как видно, количество задержанных твердых веществ и процентная доля удержания твердых веществ уменьшается при увеличении плотности суспензии.
Влияние плотности суспензии на удержание твердых веществ
Пример 4
Было желательно определить, влияет ли время успокоения на однородность покрытия твердыми компонентами субстрата из нетканого материала, помещенного в суспензию биологических порошков в метилперфторпропиловом эфире. Также было желательно определить, может ли использоваться контактная головка для нанесения покрытия на субстрат из нетканого материала.
Готовили суспензию порошков фибриногена и тромбина в HFE7000 с массовой долей твердых веществ в растворителе 12%. На три предварительно взвешенных образца нетканого материала ОРЦ-PG910 размером 10,16×10,16 см (4×4 дюйма) наносили покрытие из приготовленной суспензии. Покрытие на каждый субстрат наносили при помощи имеющейся в продаже типовой контактной головки. Более конкретно, образец субстрата помещали в приемный лоток размером 10,8×10,8 см (4,25×4,25 дюйма), после чего захватывали и поднимали типовой контактной головкой. Далее в лоток наливали суспензию. Затем субстрат перемещали до высоты успокоения и удерживали на ней в течение времени успокоения, составлявшего 2-14 секунд, после чего опускался в положение освобождения и отпускался в приемный лоток. После полного испарения растворителя делали цифровую фотографию образца. Изображение каждого образца анализировали на равномерность покрытия субстрата биологическими порошками. Анализ производили путем разделения каждого изображения на шестнадцать участков и присвоения каждому участку уровней низкого, среднего и высокого качества покрытия с использованием полуколичественной шкалы с оценками 1, 3 и 9 соответственно. Суммируя присвоенные баллы по участкам, получали общую оценку однородности покрытия для каждого образца. Для времени успокоения, составлявшего 2 секунды, данная визуальная оценка составила 144; для времени успокоения 8 секунд визуальная оценка составила 126; для времени успокоения 14 секунд визуальная оценка составила 108. Общие оценки однородности для всех образцов приводятся в таблице 2. Как видно, при увеличении времени успокоения однородность покрытия уменьшается.
Влияние времени успокоения на однородность покрытия
Пример 5
Было желательно продемонстрировать влияние разной плотности суспензии на клеящие/герметизирующие свойства. Также было желательно определить, может ли использоваться контактная головка для нанесения покрытия на субстрат из нетканого материала.
Готовили суспензию порошков фибриногена и тромбина в HFE7000 с массовой долей твердых веществ в растворителе 4,3%, 7,6%, 9,5% и 17,4%. На четыре предварительно взвешенных образца нетканого материала размером 10,16×10,16 см (4×4 дюйма) наносили покрытие из приготовленной суспензии. Покрытие на каждый субстрат наносили при помощи имеющейся в продаже типовой контактной головки. Более конкретно, образец субстрата помещали в приемный лоток, после чего захватывали и поднимали типовой контактной головкой. Суспензию заливали в лоток, и субстрат опускали и сбрасывали в суспензию. В ходе операции по опусканию субстрат перемещали до высоты успокоения, удерживали на ней в течение времени успокоения, составлявшего 2-5 секунд, после чего опускали в положение освобождения и отпускали в приемный лоток. Образцы с нанесенным покрытием проверяли с помощью теста, называемого испытанием на разрыв при гидравлическом ударе (HBLT). Круглые фрагменты образцов с нанесенным покрытием диаметром приблизительно 1,91 см (0,75 дюйма) наносили на бычий перикард, в котором было проделано отверстие. Данный фрагмент ткани с отверстием закрепляли на герметичной камере, к которой затем подводили давление с помощью солевого раствора. Измеряли давление, требуемое для разрыва герметичного соединения между тканью и образцом. Для субстрата, покрытого суспензией с массовой долей твердых веществ 4,3%, максимальное давление разрыва составило приблизительно 6,466 кПа(48,5 мм рт.ст.); для субстрата, покрытого суспензией с массовой долей твердых веществ 7,6%, максимальное давление разрыва составило приблизительно 41,797 кПа (313,5 мм рт.ст.); для субстрата, покрытого суспензией с массовой долей твердых веществ 9,5%, максимальное давление разрыва составило приблизительно 47,06 кПа (353 мм рт.ст.); и для субстрата, покрытого суспензией с массовой долей твердых веществ 17,4%, максимальное давление разрыва составило приблизительно 56,30 кПа (422,3 мм рт.ст.). Результаты тестов HBLT приведены в таблице 3 и графически представлены на фиг. 19. Как можно видеть, максимальное давление разрыва увеличивается при увеличении плотности суспензии.
Влияние плотности суспензии на максимальное давление разрыва
(массовая доля твердого вещества в растворителе, %)
(кПа (мм рт. ст.))
Пример 6
Испытание на модели остановки кровотечения у свиньи.
Было желательно продемонстрировать кровоостанавливающие свойства субстрата с нанесенным покрытием.
Один из образцов с нанесенным покрытием, полученный в примере 2, испытывали на модели кровотечения из полой вены свиньи. Свинье под общей анестезией сделали прямой надрез полой вены длиной приблизительно 1 см. Образец с нанесенным покрытием, обрезанный до размера 2,54×5,08 см (1×2 дюйма), был помещен на область надреза. С помощью пальцев на область кровотечения в течение 1 минуты оказывали давление. Через 1 минуту давление снимали и изучали ткань на предмет кровотечения и просачивания жидкости. По результатам исследования места разреза образцом субстрата с нанесенным покрытием удалось остановить кровотечение. Основа прилегала к ткани, окружающей место кровотечения. В течение 5 минут наблюдения утечки крови не наблюдалось.
Пример 7
Было желательно продемонстрировать влияние различных плотностей суспензии на эффективность удержания твердых веществ и однородность покрытия при использовании контактной головки, соответствующей реализации настоящего изобретения. Также было желательно определить, может ли контактная головка, соответствующая реализации настоящего изобретения, применяться для нанесения покрытия на субстрат из нетканого материала.
Были приготовлены суспензии порошков фибриногена и тромбина в HFE7000 с массовой долей твердых веществ в растворителе 6%, 8% и 12%. На предварительно взвешенные образцы из нетканого материала размером 10,16×10,16 см (4×4 дюйма) были нанесены покрытия из приготовленных суспензий с применением контактной головки, соответствующей реализации настоящего изобретения. Более конкретно, образец субстрата помещали в приемный лоток, после чего захватывали и поднимали контактной головкой так, чтобы субстрат сохранял ровное положение. Суспензию заливали в лоток и субстрат опускали и сбрасывали в суспензию. В ходе операции по опусканию субстрат перемещали до высоты успокоения, удерживали на ней в течение времени успокоения, составлявшего 2-5 секунд, после чего опускали в положение освобождения и отпускали в приемный лоток. Образцы с нанесенным покрытием оценивали на предмет количества задержанных твердых веществ и на визуальную равномерность. Делались цифровые фотографии образцов. Изображение каждого образца анализировали на равномерность покрытия субстрата биологическими порошками. Для данного анализа каждое изображение делили на шестнадцать участков и каждому участку присваивали оценку качества покрытия с использованием полуколичественной шкалы со значениями 1, 3, 7 и 13, где значения 1 и 13 были присвоены самому низкому и самому высокому качеству покрытия для каждого участка, соответственно. В результате суммирования баллов по отдельным участкам получали общую оценку равномерности покрытия для каждого образца, причем максимально возможному уровню равномерности в данной шкале соответствовало значение 208. При массовой доле твердых веществ 6% среднее значение визуальной оценки составило 207, а эффективность удержания 94,7%; при массовой доле твердых веществ 8% среднее значение визуальной оценки составило 201, а эффективность удержания 98,5%; при массовой доле твердых веществ 12% среднее значение визуальной оценки составило 190, а эффективность удержания 96,8%. Общая оценка равномерности для всех образцов показана в таблице 4. Как видно, однородность покрытия при увеличении плотности суспензии снижается незначительно.
Влияние плотности суспензии на удержание твердых веществ и на однородность покрытия
(массовая доля твердого вещества в растворителе, %)
Пример 8
Было желательно продемонстрировать влияние разной плотности суспензии, времени успокоения и высоты успокоения на эффективность удержания твердых веществ и равномерность покрытия на нетканом субстрате малых размеров. Также было желательно определить, может ли контактная головка, соответствующая реализации настоящего изобретения, применяться для нанесения покрытия на субстрат из нетканого материала.
Были приготовлены суспензии биологических порошков, состоящих в основном из альбумина, в HFE7000 с массовой долей твердых веществ в растворителе 6%, 7%, 8%, 9% и 10%. На предварительно взвешенные образцы из нетканого материала размером 2,54×2,54 см (1×1 дюйм) были нанесены покрытия из приготовленных суспензий с применением контактной головки, соответствующей реализации настоящего изобретения. Образец субстрата помещали в приемный лоток, после чего захватывали и поднимали контактной головкой так, чтобы субстрат сохранял ровное положение. Суспензию заливали в приемный лоток, и субстрат опускали и сбрасывали в суспензию. В ходе операции по опусканию субстрат перемещали до заданной высоты успокоения (таблице 5), удерживали на ней в течение заданного времени успокоения (таблица 5), после чего опускали в положение освобождения и сбрасывали в приемный лоток. Образцы с нанесенным покрытием анализировали на предмет количества задержанных твердых веществ и на визуальную равномерность. Делали цифровые фотографии каждого образца. На каждом изображении анализировали равномерность покрытия субстрата биологическими порошками с использованием полуколичественной шкалы со значениями 1, 3, 7 и 13, где значения 1 и 13 были присвоены самому низкому и самому высокому качеству покрытия для каждого участка, соответственно. В целом, по мере увеличения плотности суспензии величина удержания твердых веществ снижалась, за исключением плотности суспензии 10% по массе, при которой наблюдалось более высокое значение удержания твердых веществ, чем при плотности 9% по массе.
Влияние плотности суспензии, времени успокоения и высоты успокоения на удержание твердых веществ и на равномерность покрытия
(массовая доля твердого вещества в растворителе, %)
в баллах



Контактная головка для захвата пористого субстрата имеет по меньшей мере два набора штырей, каждый из которых включает множество штырей, организованных как совокупность параллельных рядов штырей, расположенных под заданным углом, причем штыри соседних рядов расположены так, что углы наклона штырей в ряду обратно симметричны углам наклона штырей в соседнем ряду штырей. Штыри одного ряда при их выдвигании движутся все вместе в одном направлении, которое определяется углом наклона этого ряда штырей, а соседние ряды штырей при выдвигании движутся в противоположных продольных направлениях относительно друг друга. Наборы штырей могут синхронно выдвигаться и втягиваться с использованием одного силового привода. Изобретение обеспечивает равномерное нанесение жидкости и эффективное ее использование. 4 н. и 16 з.п. ф-лы, 8 пр., 5 табл., 22 ил.
1. Контактная головка для захвата пористого субстрата без его деформации или повреждения, включающая:
(a) по меньшей мере два набора штырей, где каждый набор штырей включает совокупность штырей, расположенных в множестве параллельных рядов штырей под определенным углом штыря, причем штыри соседних рядов расположены так, что углы наклона штырей в ряду обратно симметричны углам наклона штырей в соседнем ряду; и
(b) при этом штыри одного ряда при их выдвигании движутся все вместе в одном направлении, которое определяется углом наклона ряда штырей, а соседние ряды штырей при выдвигании движутся в противоположных продольных направлениях относительно друг друга; и
(c) при этом наборы штырей расположены так, что они выдвигаются на практически одинаковое расстояние из нижней поверхности контактной головки; и
(d) при этом наборы штырей могут синхронно выдвигаться и втягиваться с использованием одного силового привода;
при этом контактная головка дополнительно содержит матрицу датчиков, обеспечивающую возможность определять, что субстрат захвачен и поднят равномерно.
2. Контактная головка по п.1, в которой каждый набор штырей имеет четыре параллельных ряда штырей.
3. Контактная головка по п.1, в которой угол наклона штырей находится в диапазоне от 15 до 45°.
4. Контактная головка по п.3, в которой угол наклона штырей составляет 28°.
5. Контактная головка по п.1, в которой каждый ряд штырей включает пять штырей.
6. Контактная головка по п.1, в которой концы соседних рядов штырей смещены друг относительно друга и концы штырей перемежающихся рядов штырей выровнены относительно друг друга.
7. Захватывающая конструкция для зацепления поверхности субстрата, включающая:
(a) накрывающую пластину;
(b) монтажный блок штырей, выполненный с возможностью вставки в накрывающую пластину и приема пары приводных педалей таким образом, чтобы педали могли перемещаться между оттянутым положением и положением захвата; и
(c) множество держателей штырей, из поверхностей которых выдается множество штырей, причем множество держателей штырей установлено на приводных педалях таким образом, чтобы штыри были направлены в сторону накрывающей пластины и чтобы движение держателей штырей контролировалось при помощи приводных педалей,
d) при этом совокупность штырей выдвигается из поверхности накрывающей пластины, когда приводные педали находятся в положении захвата, что позволяет штырям захватить поверхность субстрата;
(е) и при этом штыри оттягиваются от поверхности накрывающей пластины, когда приводные педали находятся в оттянутом положении, что позволяет штырям освободить поверхность субстрата;
при этом захватывающая конструкция дополнительно содержит матрицу датчиков, обеспечивающую возможность определять, что субстрат захвачен и поднят равномерно.
8. Захватывающая конструкция по п.7, в которой накрывающая пластина имеет углубление для установки монтажного блока штырей.
9. Захватывающая конструкция по п.8, в которой углубление имеет множество прорезей, проделанных в дне этого углубления для выдвигания через них штырей, если приводные педали находятся в положении захвата.
10. Захватывающая конструкция по п.7, в которой движущая сила, перемещающая приводные педали между положением захвата и оттянутым положением, обеспечивается одним силовым приводом.
11. Захватывающая конструкция по п.7, включающая множество монтажных блоков штырей, при этом накрывающие пластины имеют множество углублений для приема множества монтажных блоков штырей.
12. Захватывающая конструкция по п.7, в которой монтажный блок штырей и пара приводных педалей выполнены с возможностью двигаться, скользя друг относительно друга, в результате чего пара приводных педалей перемещается между положением захвата и оттянутым положением.
13. Захватывающая конструкция по п.7, включающая четыре держателя штырей.
14. Захватывающая конструкция по п.7, включающая пять штырей на одном держателе.
15. Захватывающая конструкция по п.7, в которой совокупность штырей, выдающихся из поверхности держателей, установлена под углом.
16. Способ захвата и освобождения пористого субстрата, включающий:
(а) обеспечение устройства, имеющего платформу для размещения пористого субстрата, где упомянутое устройство имеет также контактную головку, включающую по меньшей мере два набора штырей, которые могут синхронно выдвигаться и втягиваться одним силовым приводом, и каждый набор штырей включает совокупность штырей, организованных в множество параллельных рядов штырей, расположенных под заданным углом, причем штыри соседних рядов расположены так, что углы наклона штырей в ряду обратно симметричны углам наклона штырей в соседнем ряду штырей;
(b) размещение субстрата на платформе устройства;
(c) опускание контактной головки в положение захвата;
(d) выдвигание наборов штырей контактной головки для захвата поверхности субстрата без повреждения или деформации указанного субстрата;
(e) проверку захвата субстрата с помощью матрицы датчиков контактной головки;
(f) подъем захваченного субстрата с платформы субстрата;
(g) проверку равномерности подъема субстрата с помощью матрицы датчиков;
(h) опускание контактной головки с захваченным субстратом в положение освобождения и
(i) втягивание наборов штырей контактной головки для освобождения субстрата.
17. Способ по п.16, в котором положение для захвата определяют на основе длины выдвижения штырей из контактной головки и толщиной субстрата.
18. Способ нанесения равномерного покрытия из жидкости на поверхность пористого субстрата, включающий:
(а) обеспечение устройства, имеющего платформу для размещения пористого субстрата, находящегося в резервуаре для покрытия, причем упомянутое устройство также имеет контактную головку с матрицей датчиков и множеством выдвигаемых и втягиваемых штырей для осуществления захвата, удержания и освобождения субстрата равномерно в резервуар для покрытия, причем множество штырей в упомянутой головке организовано как совокупность параллельных рядов штырей, расположенных под заданным углом, причем штыри соседних рядов расположены так, что углы наклона штырей в ряду обратно симметричны углам наклона штырей в соседнем ряду;
(b) размещение резервуара, содержащего субстрат, на платформе устройства;
(c) выдвигание штырей контактной головки для захвата поверхности субстрата;
(d) подъем захваченного субстрата из резервуара для покрытия;
(e) проверка равномерности захвата субстрата с помощью матрицы датчиков;
(f) налив жидкого покрытия в пустой резервуар для покрытия;
(g) после налива жидкого покрытия в резервуар опускание равномерно захваченного субстрата в положение освобождения и
(h) втягивание штырей контактной головки для освобождения субстрата равномерно в резервуар, что позволяет добиться равномерного нанесения покрытия на поверхность субстрата.
19. Способ по п.18, в котором пористый субстрат состоит из гибкой матрицы материала, изготовленной из окисленной регенерированной целлюлозной основы материала с включенными волокнами полиглактина 910.
20. Способ по п.19, в котором жидкое покрытие состоит из суспензии, полученной при суспендировании человеческого фибриногена и человеческого тромбина в гидрофторэфирном растворителе.
| US 5114132 A1, 19.05.1992 | |||
| Манипулятор изделий в установках для детонационного напыления покрытий | 1986 |
|
SU1315030A1 |
| Подвеска для крепления изделий на конвейере | 1986 |
|
SU1386318A1 |
| Подвеска для крепления изделий | 1985 |
|
SU1344426A1 |
| DE 3907104 A1, 06.09.1990. | |||

