Варианты осуществления, описанные в данном документе, относятся к стиральной машине и способу управления стиральной машиной, которая измеряет вес белья.
В основном, стиральная машина (обычно стиральная машина барабанного типа) включает в себя бак для воды, установленный в корпусе, для вмещения воды, содержащей моющее средство, т.е. вода с моющим средством, вращающийся бак, установленный с возможностью вращения в баке для воды, для стирки белья, и дверь, шарнирно соединенную с передней стороной корпуса, для открытия и закрытия отверстия, образованного на передней стороне корпуса. Белье загружают во вращающийся бак через отверстие корпуса, заданное количество воды с моющим средством подается в бак для воды, и вращающийся бак вращается и стирает белье.
Когда пользователь выбирает режим стирки, измеряется вес белья для определения количества воды для стирки, вода для стирки, достаточная для смачивания белья, подается в бак для воды вместе с моющим средством в соответствии с определенным количеством воды для стирки, и вращающийся бак вращается для выполнения режима стирки и режима сушки при быстром вращении.
При точном измерении веса белья количество воды, соответствующее измеренному весу белья, подается для стирки белья. Следовательно, используемое количество воды и мощности уменьшено, таким образом, уменьшается расход энергии.
В известном уровне техники белье во вращающемся баке используется в качестве инерционной нагрузки, и инерция рассчитывается для измерения веса белья. Например, заданное напряжение подается на электродвигатель для увеличения скорости вращающегося бака, и инерция рассчитывается с использованием изменения напряжения и скорости электродвигателя во время увеличения скорости вращающегося бака для измерения веса белья.
В данном способе измерения веса белья дополнительный датчик не требуется, таким образом, уменьшаются материальные затраты. Однако может произойти ошибка в измерении веса в соответствии с формой кривой напряжения. Кроме того, стиральные машины могут иметь разные отклонения, в результате чего ошибка может возникнуть во время измерения веса белья.
Аспектом вариантов осуществления является создание стиральной машины и способа управления стиральной машиной, в которой изменение изображения или изменение количества света на основании смещения объекта, которое изменяется в зависимости от веса белья, определяются для измерения веса белья, таким образом повышается надежность измерения веса белья.
Дополнительные аспекты вариантов осуществления будут изложены частично в нижеследующем описании и частично будут понятны из описания или могут быть изучены при осуществлении на практике вариантов осуществления.
В соответствии с одним аспектом вариантов осуществления стиральная машина включает в себя объект, смещение которого изменяется в зависимости от веса белья, сенсорный модуль для определения изображения, количества света или оптического изображения, изменяемых в зависимости от смещения объекта, и устройство управления для измерения веса белья на основании изменения изображения или изменения количества света.
Объектом может быть, по меньшей мере, или подвесная пружина для поддержания бака для воды, содержащего вращающийся бак в подвешенном состоянии, или бак для воды, или амортизатор для гашения вибрации, создаваемой баком для воды, или их сочетание.
Сенсорный модуль может включать в себя источник света для излучения света на объект, датчик изображения для приема света, отраженного от объекта, для создания изображения объекта и процессор обработки изображений для выполнения сравнения между опорным изображением, которым является изображение перед загрузкой белья во вращающийся бак, и текущим изображением, которым является изображение после загрузки белья во вращающийся бак, для определения изменения изображения объекта.
Процессор обработки изображений может устанавливать окно шаблона заданного размера на опорном изображении, рассчитывать значения коэффициента корреляции при перемещении окна шаблона относительно всего текущего изображения на заданное количество пикселей, рассчитывать величину смещения окна шаблона относительно положения, имеющего наибольшее значение коэффициента корреляции, и распознавать рассчитанную величину смещения в качестве величины изменения изображения объекта.
Если объектом является амортизатор, сенсорный модуль может быть расположен на амортизаторе для определения изменения изображения амортизатора в зависимости от смещения амортизатора.
Амортизатор может включать в себя цилиндр и поршень, установленный в цилиндре с возможностью движения вперед и назад, и сенсорный модуль может быть расположен на цилиндре или поршне для определения изменения изображения цилиндра или поршня в зависимости от смещения цилиндра или поршня.
Если объектом является бак для воды, сенсорный модуль может быть расположен на корпусе стиральной машины, соответствующем баку для воды, для определения изменения изображения бака для воды в зависимости от смещения бака для воды.
Сенсорный модуль может определять изменение изображения бака для воды в зависимости от вертикального смещения бака для воды.
Если объектом является подвесная пружина, сенсорный модуль может быть расположен на подвесной пружине для определения изменения изображения подвесной пружины в зависимости от смещения подвесной пружины.
Объектом может быть бак для воды, сенсорный модуль может включать в себя светоизлучающий узел для излучения света и светоприемный узел для приема света, излучаемого светоизлучающим узлом, причем сенсорный модуль располагается таким образом, что количество света, соответствующее смещению бака для воды, принимаемое светоприемным узлом, изменяется, и устройство управления может измерять вес белья на основании изменения количества света, принимаемого светоприемным узлом.
Светоизлучающий узел может включать в себя источник света и линзу для рассеивания света, излучаемого источником света, так что свет одновременно излучается на светоприемный узел.
Объектом может быть бак для воды, сенсорный модуль может включать в себя узел источника света для излучения света и датчик оптического изображения для приема света, излучаемого узлом источника света, причем сенсорный модуль располагается таким образом, что оптическое изображение, соответствующее смещению бака для воды, измеряемое датчиком оптического изображения, изменяется, и устройство управления может измерять вес белья на основании оптического изображения, определенного датчиком оптического изображения.
В соответствии с другим аспектом вариантов осуществления способ управления стиральной машиной, содержащей объект, смещение которого изменяется в зависимости от веса белья, включает в себя определение изменения изображения объекта в зависимости от смещения объекта и измерение веса белья на основании определенного изменения изображения объекта.
Предметом может быть, по меньшей мере, или подвесная пружина для поддержания бака для воды, содержащего вращающийся бак в подвешенном состоянии, или бак для воды, или амортизатор для гашения вибрации, создаваемой баком для воды, или их сочетания.
Определение изменения изображения объекта может включать в себя установку окна шаблона заданного размера на опорном изображении, которым является изображение перед загрузкой белья во вращающийся бак, расчет значений коэффициента корреляции при перемещении окна шаблона относительно всего текущего изображения, которым является изображение после загрузки белья во вращающийся бак, на произвольное количество пикселей, и расчет величины смещения окна шаблона относительно положения, имеющего наибольшее значение коэффициента корреляции.
Эти и/или другие аспекты вариантов осуществления станут очевидными и более понятными из нижеследующего описания вариантов осуществления вместе с сопроводительными чертежами, на которых:
фиг.1 - схематичный вид в разрезе сбоку, иллюстрирующий устройство стиральной машины барабанного типа в соответствии с вариантом осуществления;
фиг.2 - вид в разрезе спереди стиральной машины барабанного типа на фиг.1;
фиг.3 - вид, иллюстрирующий устройство амортизатора и сенсорного модуля на фиг.2;
фиг.4 - схематичный вид в разрезе спереди, иллюстрирующий устройство стиральной машины барабанного типа в соответствии с другим вариантом осуществления;
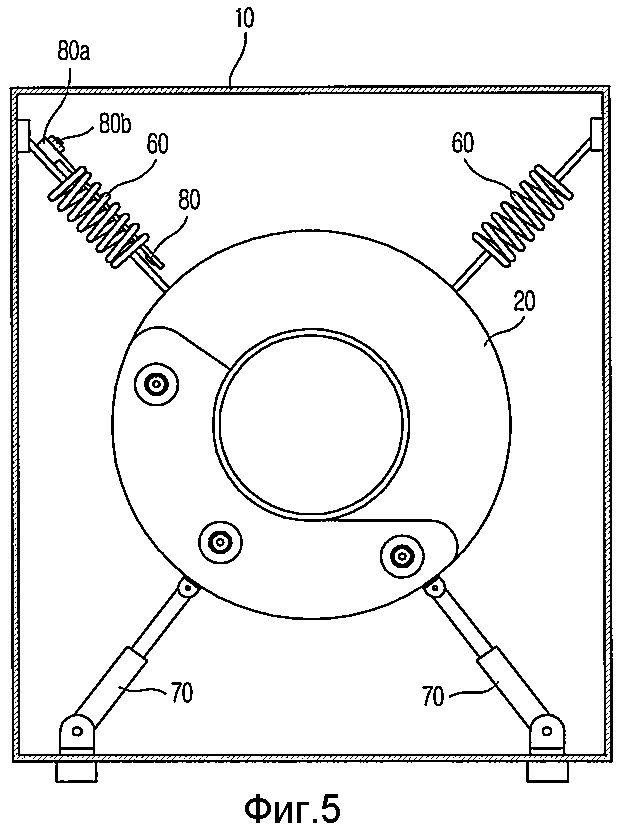
фиг.5 - схематичный вид в разрезе спереди, иллюстрирующий устройство стиральной машины барабанного типа в соответствии с другим вариантом осуществления;
фиг.6 - блок-схема управления сенсорного модуля, изображенного на фиг.3-5;
фиг.7 - структурная схема управления, иллюстрирующая процесс определения изменения изображения на основании смещения объекта, которое изменяется в зависимости от веса белья, в стиральной машине барабанного типа, изображенной на фиг.2, для измерения веса белья;
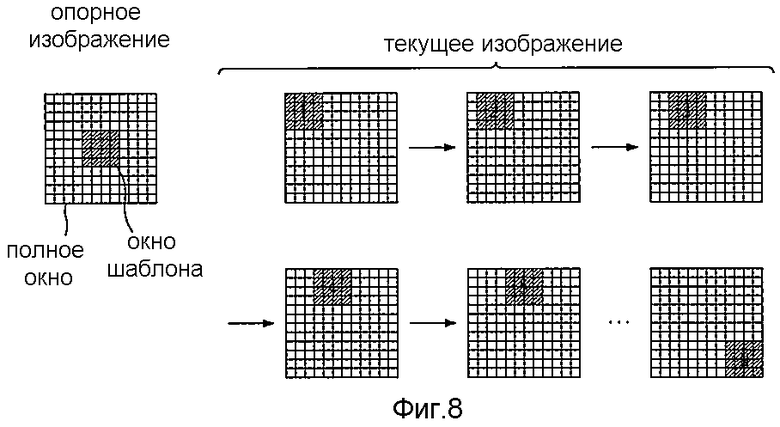
фиг.8 - вид, иллюстрирующий процесс создания пиксельной карты для определения коэффициента корреляции между опорным изображением и текущим изображением на фиг.7;
фиг.9 - схематичный вид в разрезе спереди, иллюстрирующий устройство стиральной машины барабанного типа в соответствии с другим вариантом осуществления;
фиг.10 - блок-схема управления сенсорного модуля, изображенного на фиг.9;
фиг.11 - структурная схема управления, иллюстрирующая процесс определения изменения количества света на основании высоты подъема бака для воды, которая изменяется в зависимости от веса белья, в стиральной машине барабанного типа, изображенной на фиг.9, для измерения веса белья;
фиг.12 - блок-схема управления стиральной машины барабанного типа в соответствии с другим вариантом осуществления; и
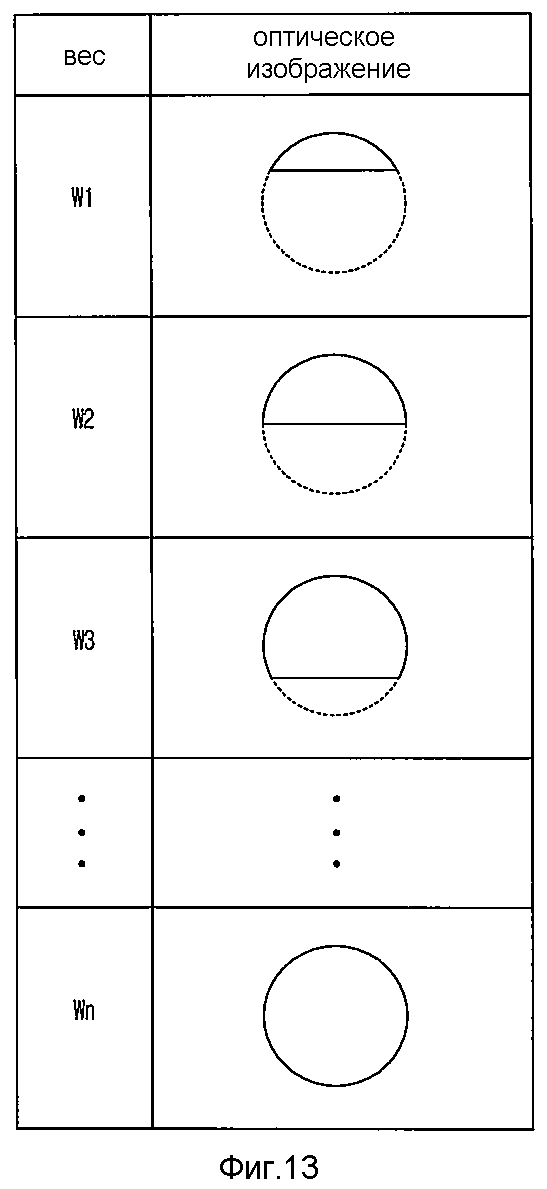
фиг.13 - вид, иллюстрирующий оптические изображения на основании веса белья, определяемые датчиком изображения на фиг.12.
Подробно будет сделана ссылка на варианты осуществления, примеры которых проиллюстрированы на сопроводительных чертежах, на которых подобные ссылочные позиции относятся к подобным элементам.
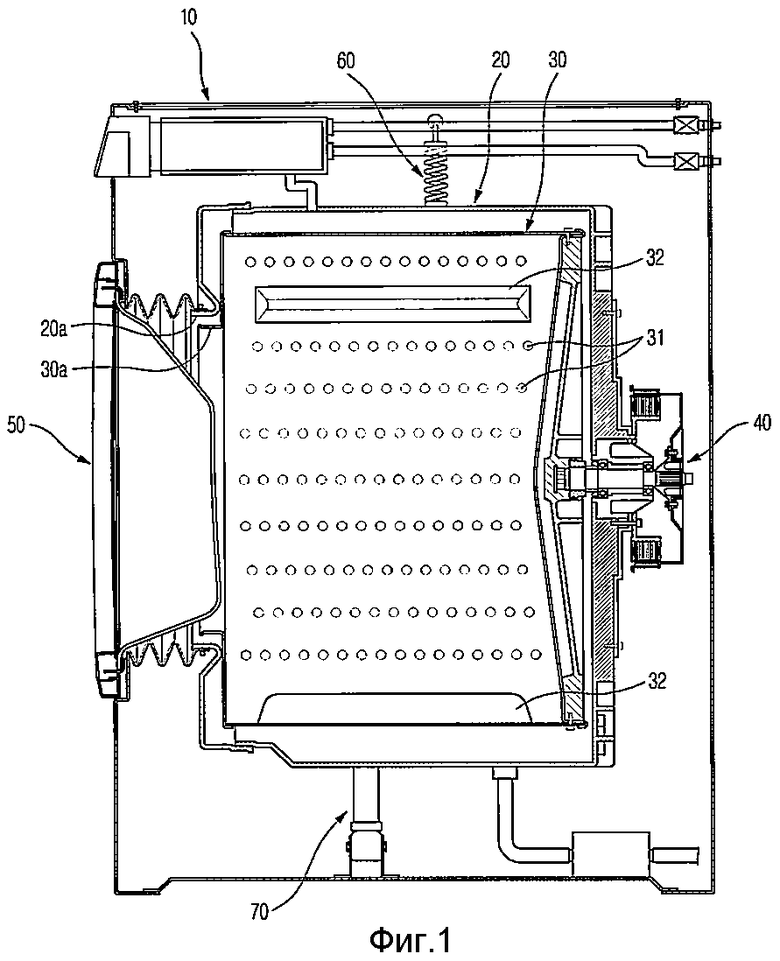
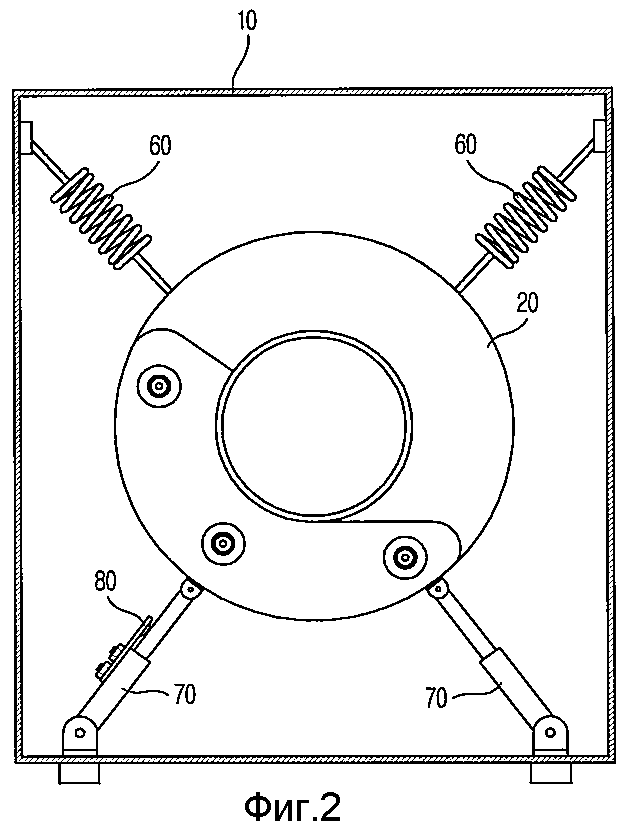
Фиг.1 - схематичный вид в разрезе сбоку, иллюстрирующий устройство стиральной машины барабанного типа в соответствии с вариантом осуществления, и фиг.2 - схематичный вид в разрезе спереди стиральной машины барабанного типа, изображенной на фиг.1.
Как показано на фиг.1 и 2, стиральная машина барабанного типа включает в себя коробчатый корпус 10, образующий ее внешний вид, бак 20 для воды, установленный в корпусе 10 для содержания воды, цилиндрический вращающийся бак 30, установленный с возможностью вращения в баке 20 для воды, причем вращающийся бак 30 содержит сквозные отверстия 31, через которые проходят вода и воздух, и приводной электродвигатель 40 для передачи вращающей силы вращающемуся баку 30, так что вращающийся бак 30 вращается для стирки и сушки при большой скорости белья во вращающемся баке 30.
Бак 20 для воды и вращающийся бак 30 частично открыты на своих передних центральных участках для образования впускных отверстий 20a и 30a, через которые загружают белье или выгружают белье из вращающегося бака 30. С передней стороной корпуса 10 шарнирно соединена дверь 50 для открытия и закрытия впускных отверстий 20a и 30a бака 20 для воды и вращающегося бака 30. На внутренней периферии вращающегося бака 30 расположены ребра 32 на заданном расстоянии друг от друга. Во время вращения вращающегося бака 30 в переменных направлениях белье поднимается и опускается за счет ребер 32, в результате чего белье стирается.
В данном варианте осуществления стиральная машина барабанного типа также включает в себя подвесные пружины 60 для упругого поддержания бака 20 для воды, в котором установлен вращающийся бак 30, и амортизаторы 70, расположенные под баком 20 для воды для гашения вибрации. Подвесные пружины 60 и амортизаторы 70 поддерживают с возможностью перемещения бак 20 для воды для предотвращения возникновения вибрации во время работы стиральной машины барабанного типа.
Каждый из амортизаторов 70 установлен на баке 20 для воды на одном своем конце и на нижней части корпуса 10 на своем другом конце для гашения вибрации, создаваемой баком 20 для воды во время вращения бака 20 для воды. То есть вибрация, создаваемая вращающимся баком во время вращения вращающегося бака, передается баку 20 для воды, в результате чего бак 20 для воды вибрирует во всех направлениях, например, назад и вперед, в поперечном направлении и вверх и вниз. Такая вибрация бака 20 для воды гасится подвесными пружинами 60 и амортизаторами 70. Сенсорный модуль 80 установлен на амортизаторе 70.
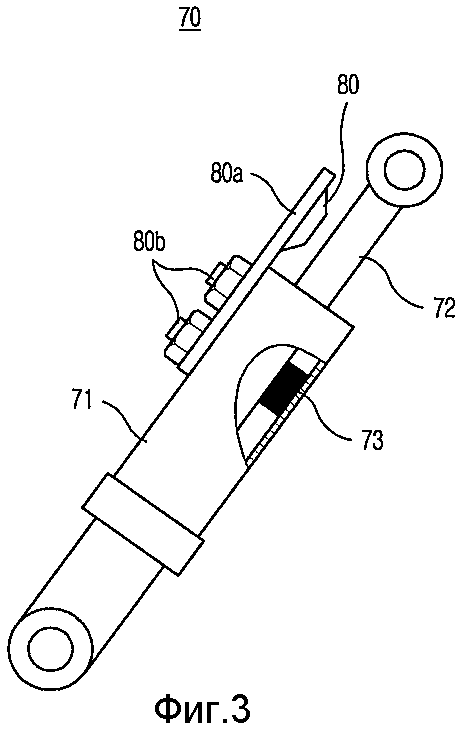
Фиг.3 - вид, иллюстрирующий устройство амортизатора и сенсорный модуль, изображенные на фиг.2.
Как показано на фиг.3, амортизатор 70 включает в себя цилиндр 71, один конец которого является открытым, а другой установлен на нижней части корпуса 10 стиральной машины, поршень 72, один конец которого установлен в цилиндре 71 с возможностью перемещения вперед и назад, а другой конец установлен на нижней части бака 20 для воды, и фрикционную накладку 73, одна основная поверхность которой установлена на поршне 72, а другая основная поверхность находится в плотном контакте с внутренней поверхностью цилиндра 71, так что фрикционная накладка 73 перемещается вперед и назад в цилиндре 71 вместе с поршнем 72 для гашения вибрации в результате трения между фрикционной накладкой 73 и цилиндром 71.
Следовательно, при передаче вибрации бака 20 для воды амортизатору фрикционная накладка 73 перемещается вдоль внутренней поверхности цилиндра 71 в соответствии с перемещением поршня 72 для гашения вибрации, передаваемой от бака 20 для воды, в результате трения между фрикционной накладкой 73 и цилиндром 71.
Кроме того, сенсорный модуль 80 установлен на амортизаторе 70 при помощи узла 80a и 80b крепления.
Узел 80a и 80b крепления включает в себя опорный элемент 80a для поддержания сенсорного модуля 80 и фиксирующие элементы 80b для закрепления опорного элемента 80a на цилиндре 71.
Одна сторона опорного элемента 80a закреплена на цилиндре 71 при помощи фиксирующих элементов 80b, а другая сторона опорного элемента 80a проходит от соответствующего конца цилиндра 71 на заданную длину в его продольном направлении.
Сенсорный модуль 80 установлен на выступающей части опорного элемента 80a, так что сенсорный модуль 80 расположен напротив поршня 72 на заданном расстоянии от поршня 72.
При загрузке белья во вращающийся бак 30 бак 20 для воды опускается в вертикальном направлении. При этом поршень 72 амортизатора 70 частично отводится в цилиндр 71. Чем тяжелее белье, тем глубже поршень 72 отводится в цилиндр 71.
Сенсорный модуль 80 определяет изображение поршня 72 перед загрузкой белья во вращающийся бак 30, то есть опорное изображение, и изображение поршня 72 после загрузки белья во вращающийся бак 30, то есть текущее изображение. Изменение изображения определяется при помощи корреляции между двумя изображениями. Вес белья измеряется на основании изменения изображения.
Сенсорный модуль 80 может быть установлен на баке 20 для воды, смещение которого изменяется в зависимости от веса белья, или на корпусе 10 напротив бака 20 для воды, или на соответствующей подвесной пружине 60 для определения изменения изображения на основании смещения подвесной пружины 60.
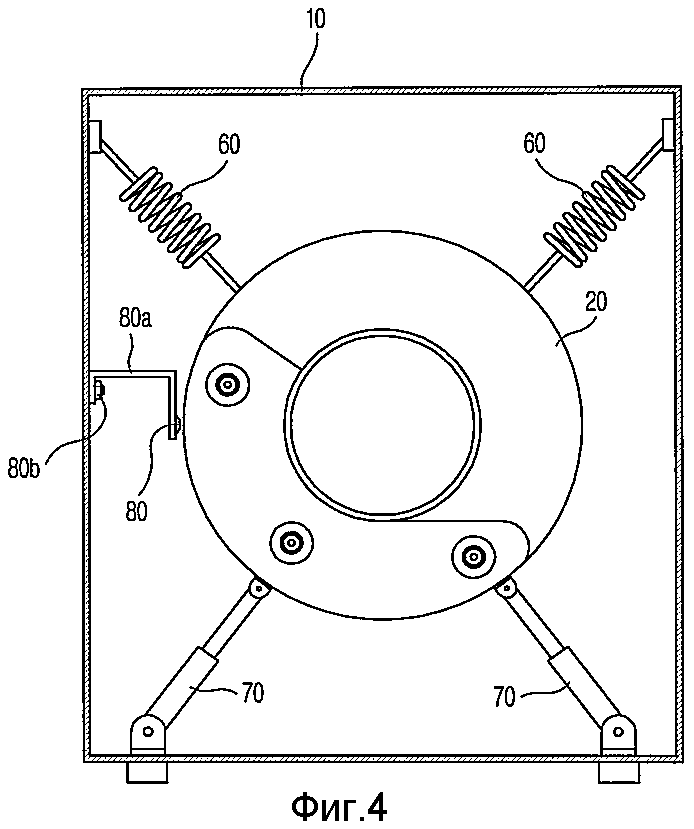
Как показано на фиг.4, сенсорный модуль 80 может быть установлен на узле 80a и 80b крепления, установленном на корпусе 10 таким образом, что узел 80a и 80b крепления располагается на заданном расстоянии от бака 20 для воды. Одна сторона опорного элемента 80a узла 80a и 80b крепления закреплена на корпусе 10 при помощи фиксирующего элемента 80b, а другая сторона опорного элемента 80a проходит от корпуса 10 по направлению к баку 20 для воды на заданную длину. Сенсорный модуль 80 установлен на участке опорного элемента 80a, расположенном рядом с положением напротив наружной периферии бака 20 для воды.
При загрузке белья во вращающийся бак 30 бак 20 для воды опускается в вертикальном направлении. Чем тяжелее белье, тем больше опускается бак 20 для воды.
Сенсорный модуль 80 определяет изменение изображения на основании смещения бака 20 для воды перед загрузкой белья во вращающийся бак 30 и после загрузки белья во вращающийся бак 30. Вес белья измеряется на основании изменения изображения.
Как показано на фиг.5, сенсорный модуль 80 может быть установлен на узле 80a и 80b крепления, соединенном с соответствующей подвесной пружиной 60. Опорный элемент 80a узла 80a и 80b крепления выполнен в форме консоли. Одна сторона опорного элемента 80a закреплена на участке подвесной пружины 60, расположенном рядом с соединением между подвесной пружиной 60 и корпусом 10, при помощи фиксирующего элемента 80b, а другая сторона опорного элемента 80a проходит через подвесную пружину 60 по направлению к баку 20 для воды. Сенсорный модуль 80 установлен на участке опорного элемента 80a, расположенном рядом с баком 20 для воды, так что сенсорный модуль 80 находится напротив подвесной пружины 60 на заданном расстоянии от подвесной пружины 60.
При загрузке белья во вращающийся бак 30 бак 20 для воды опускается в вертикальном направлении, в результате чего подвесная пружина 60 растягивается. Чем тяжелее белье, тем больше растягивается подвесная пружина 60.
Сенсорный модуль 80 определяет изменение изображения на основании смещения подвесной пружины 60 перед загрузкой белья во вращающийся бак 30 и после загрузки белья во вращающийся бак 30. Вес белья измеряется (или определяется) на основании изменения изображения.
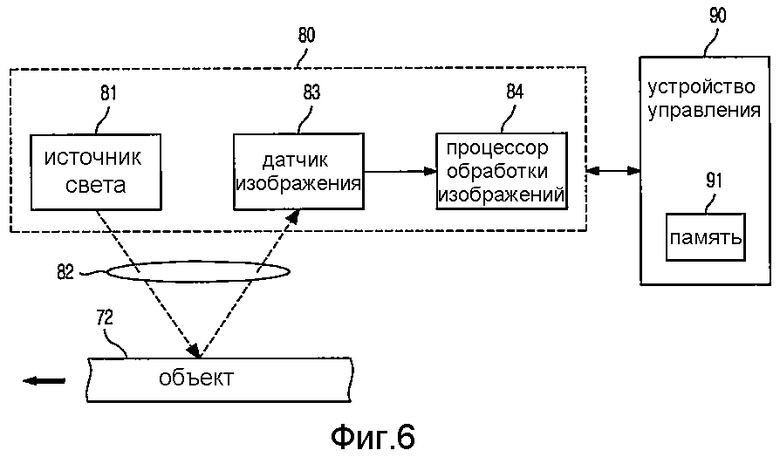
Фиг.6 - блок-схема управления сенсорного модуля, изображенного на фиг.3-5.
Как показано на фиг.6, сенсорный модуль 80 включает в себя источник 81 света, линзу 82, датчик 83 изображения и процессор 84 для обработки изображений.
Источник 81 света может состоять из светодиода или лазера. Свет, излучаемый источником света, направляется к объекту 72. Объектом 72 может быть амортизатор 70, бак 20 для воды или подвесная пружина 60, смещение которых изменяется в зависимости от веса белья.
Линза 82 регулирует направление света, излучаемого источником 81 света, так что свет направляется к объекту 72, и направление света, отраженного от объекта 72, так что свет направляется к датчику 83 изображения.
Датчик 83 изображения принимает свет, отраженный от объекта 72, для создания изображения объекта 72. Датчик 83 изображения может включать в себя, по меньшей мере, одно устройство с зарядовой связью или комплементарный полупроводниковый датчик со структурой металл-оксид. Датчик 83 изображения создает, например, двухмерное изображение объекта 72.
Процессор 84 обработки изображений рассчитывает смещение между двумя изображениями с использованием общего логарифма определения корреляции для сравнения двух изображений.
Источник 81 света и датчик 83 изображения включены в сенсорный модуль 80 для достижения конструктивного единства. Процессор 84 обработки изображений может также быть включен в сенсорный модуль 80, хотя процессор 84 обработки изображений расположен в другом положении.
Устройство 90 управления устанавливает связь с процессором 84 обработки изображений для приема изменения изображения между двумя изображениями с процессора 84 обработки изображений и считывает вес белья, соответствующий изменению изображения, из памяти 91 для измерения веса белья.
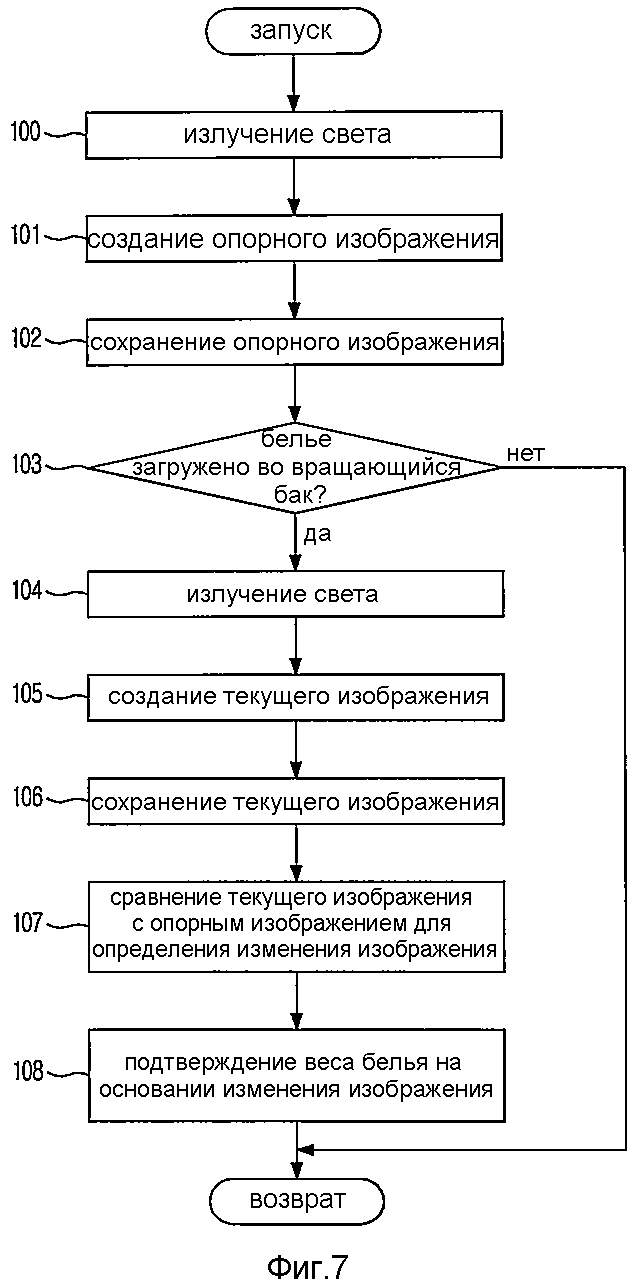
Фиг.7 - схема последовательности операций, иллюстрирующая процесс определения изменения изображения на основании смещения объекта, которое изменяется в зависимости от веса белья, для измерения веса белья.
Как показано на фиг.7 вместе с фиг.6, устройство 90 управления управляет сенсорным модулем 80 для создания (обнаружения) и сохранения изображения объекта 72 перед загрузкой белья во вращающийся бак 30.
После приема команды с устройства 90 управления сенсорный модуль 80 излучает свет на объект 72 при помощи источника 81 света. Свет, излучаемый источником 81 света, направляется к объекту 72 при помощи линзы 82. Свет, направленный к объекту 72, отражается от объекта 72 и принимается датчиком 83 изображения при помощи линзы 82.
Сенсорный модуль 80 создает (обнаруживает) изображение объекта 72 при помощи света, отраженного от объекта 72 и принятого датчиком 83 изображения (101).
Устройство 90 управления принимает изображение объекта 72 с сенсорного модуля 80 его сохранения в памяти 91 в качестве опорного изображения или сигнала объекта 72 (102). При этом изображение объекта 72 может быть сохранено в памяти (не показана) сенсорного модуля 80. Понятно, что операции 100-102 могут быть исключены. Опорное изображение объекта может быть сохранено при изготовлении или загрузке при помощи проводной или беспроводной сети.
Устройство 90 управления определяет, было ли загружено белье во вращающийся бак 30 (103). Определение относительно того, было ли загружено белье во вращающийся бак 30, может быть достигнуто на основании действия двери, датчика белья или команды пользователя.
После определения в операции 103, что белье не было загружено во вращающийся бак 30, устройство 90 управления возвращается к заданной программе.
С другой стороны, после определения в операции 103, что белье было загружено во вращающийся бак 30, устройство 90 управления управляет сенсорным модулем 80 для создания и сохранения изображения объекта 72. При этом, когда белье было загружено во вращающийся бак 30, объект 72 перемещается в направлении, указанном стрелкой на фиг.6, в соответствии с весом белья, в результате чего изображение объекта 72, созданное сенсорным модулем 80, изменяется.
В соответствии с командой устройства 90 управления сенсорный модуль 80 направляет свет на объект 72 при помощи источника 81 света (104). При этом свет, излучаемый источником 81 света, направляется на объект 72 при помощи линзы 82, и свет, направленный на объект 72, отражается от объекта 72 и принимается датчиком 83 изображения при помощи линзы 82.
Сенсорный модуль 80 создает (обнаруживает) изображение объекта 72 при помощи света, отраженного от объекта 72 и принятого датчиком 83 изображения (105).
Устройство 90 управления принимает изображение объекта 72 с сенсорного модуля 80 для сохранения его в памяти 91 в виде текущего изображения объекта 72 (106). При этом изображение объекта 72 может быть сохранено в памяти сенсорного модуля 80.
Устройство 90 управления определяет изменение изображения между опорным изображением и текущим изображением объекта 72 при помощи сенсорного модуля 80 (107). Процессор 84 обработки изображений сравнивает текущее изображение объекта 72 с опорным изображением объекта 72 для определения изменения изображения объекта 72. Понятно, что сенсорный модуль может обнаруживать сигнал от изображения и сохранять обнаруженный сигнал и сравнивать его с опорным сигналом.
Затем устройство 90 управления считывает вес белья, соответствующий изменению изображения между опорным изображением и текущим изображением объекта 72, из памяти 91 (такой как таблица, в которой приведены изменение и соответствующий вес), для измерения веса белья (108).
Как показано на фиг.8, изменение изображения на основании смещения объекта, которое изменяется в зависимости от веса белья, определяется при помощи сравнения опорного изображения с текущим изображением объекта 72. Изображение объекта перед загрузкой белья во вращающийся бак 30 устанавливается в качестве опорного изображения, на котором определяется окно шаблона. Окно шаблона является общей частью между опорным изображением и текущим изображением. При сравнении окна шаблона с текущим изображением пиксели в окне шаблона сравниваются с общим количеством пикселей входного кадра, хотя каждый пиксель в окне шаблона может сравниваться с ближайшим к нему пикселем.
В данном варианте осуществления окно шаблона (например, окно 4×4 пикселей) устанавливается на основании опорного изображения (например, изображение 12×12 пикселей), и окно шаблона перемещается относительно всего текущего изображения (например, изображение 12×12 пикселей) на произвольное количество пикселей (например, один пиксель) для определения коэффициента корреляции.
Сравнение между окном шаблона опорного изображения и первой областью текущего изображения выполняется для определения коэффициента корреляции, и сравнение между окном шаблона опорного изображения и второй областью текущего изображения выполняется для определения коэффициента корреляции. Этот процесс выполняется многократно до тех пор, пока не будет выполнено сравнение между окном шаблона опорного изображения и N-ной областью текущего изображения.
В положении с наиболее эффективной корреляцией создаются величины смещения по оси X и оси Y (величины изменения изображения). Величины смещения по оси X и оси Y могут включать в себя диапазон от значений координат (0, 0) объекта 72 перед загрузкой белья во вращающийся бак 30 до максимальных значений координат (n, n) объекта 72. Для сравнения, объект 72 перемещается прямолинейно, и, следовательно, величина смещения по оси X может быть создана в качестве эффективной величины. Максимальная величина n смещения определяется на основании размера всего окна текущего изображения и размера окна шаблона опорного изображения.
Полученная величина изменения изображения, обозначающая смещение объекта 72, передается в устройство 90 управления, которое использует величину изменения изображения для измерения веса белья.
Ниже будет описан процесс определения изменения количества света на основании высоты подъема бака для воды, которая изменяется в зависимости от веса белья, для измерения веса белья.
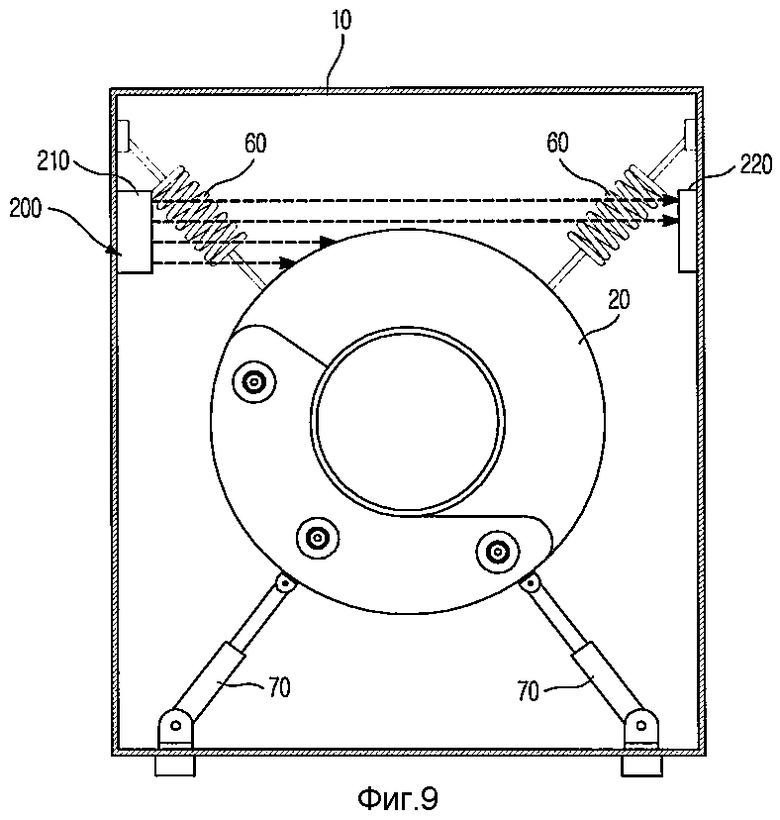
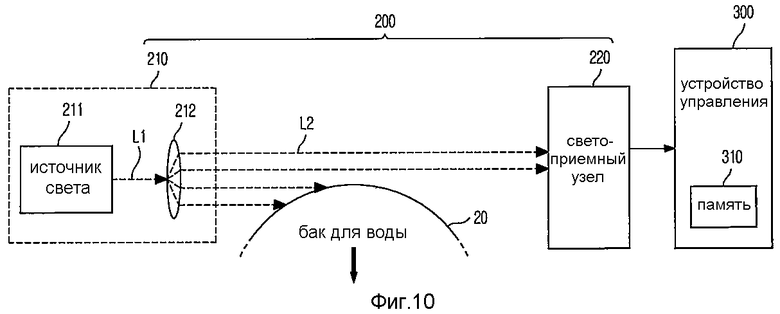
Фиг.9 - схематичный вид в разрезе спереди, иллюстрирующий устройство стиральной машины барабанного типа в соответствии с другим вариантом осуществления. Фиг.10 - блок-схема управления сенсорного модуля 200, изображенного на фиг.9.
Как показано на фиг.9, сенсорный модуль 200 включает в себя светоизлучающий узел 210 для излучения света и светоприемный узел 220 для приема света, излучаемого светоизлучающим узлом 210. Светоизлучающий узел 210 и светоприемный узел 220 установлены на стенке корпуса 10 таким образом, что светоизлучающий узел 210 и светоприемный узел 220 находятся напротив друг друга через бак 20 для воды. Светоизлучающий узел 210 и светоприемный узел 220 установлены в положениях, в которых количество света, излучаемое светоизлучающим узлом 219 и принимаемое светоприемным узлом 220, изменяется на основании высоты подъема бака для воды, обусловленной весом белья во вращающемся баке 30. Например, светоизлучающий узел 210 и светоприемный узел 220 могут быть установлены таким образом, что количество света, принимаемое светоприемным узлом 220, уменьшается, когда белье во вращающемся баке 30 является легким, и количество света, принимаемого светоприемным узлом 220, увеличивается, когда белье во вращающемся баке 30 является тяжелым.
Светоизлучающий узел 210 излучает свет в светоприемный узел 220 (см. пунктирные линии на фиг.9).
Перед загрузкой белья во вращающийся бак 30 бак 20 для воды частично перекрывает путь света между светоизлучающим узлом 210 и светоприемным узлом 220. Следовательно, некоторое количество света, излучаемого светоизлучающим узлом 210, не принимается светоприемным узлом 220, в результате чего количество света, принимаемого светоприемным узлом 220, уменьшается.
При загрузке белья во вращающийся бак 30 бак 20 для воды опускается в вертикальном направлении в соответствии с весом белья, в результате чего количество света, принимаемого светоприемным узлом 220, увеличивается. Чем тяжелее белье, тем больше опускается бак 20 для воды, в результате чего количество света, принимаемого светоприемным узлом 220, дополнительно увеличивается.
Таким образом, сенсорный модуль 80 определяет изменение количества света на основании высоты подъема бака 20 для воды перед загрузкой белья и после загрузки белья во вращающийся бак 30, и вес белья измеряется на основании изменения количества света.
Как показано на фиг.10, сенсорный модуль 200 включает в себя светоизлучающий узел 210 и светоприемный узел 220.
Светоизлучающий узел 210 включает в себя источник 211 света и линзу 212. Источник 211 света может состоять из светодиода или лазера. Однако он этим не ограничивается. Источник 211 света излучает свет. Линза 212 увеличивает путь света, излучаемого источником света 211. То есть линза 212 рассеивает свет L1, излучаемый источником 211 света таким образом, что множество лучей L2 света одновременно направляются на светоприемный узел 220. На месте линзы 212 может быть установлено множество источников 211 света в светоизлучающем узле 210 таким образом, что источники 211 света располагаются параллельно по отношению к светоприемному узлу 220. В этом случае светоизлучающий узел 210 и светоприемный узел 220 располагаются таким образом, что некоторое количество света, излучаемого светоизлучающим узлом 210, блокируется баком 20 для воды перед загрузкой белья во вращающийся бак 30 и, таким образом, не принимается светоприемным узлом 220.
Устройство 300 управления взаимодействует с сенсорным модулем 200 для приема данных о количестве света с светоприемного узла 220 и сравнивает полученные данные о количестве света с опорными данными о количестве света для измерения веса белья. Например, устройство 300 управления принимает величину интенсивности света со светоприемного узла 220, сравнивает полученную величину интенсивности света с заданной величиной для расчета значения разности интенсивностей света и считывает вес белья, соответствующий величине разности интенсивностей света, из памяти 310 для измерения веса белья. Память 310 предварительно сохраняет вес белья на основании величин разности интенсивностей света.
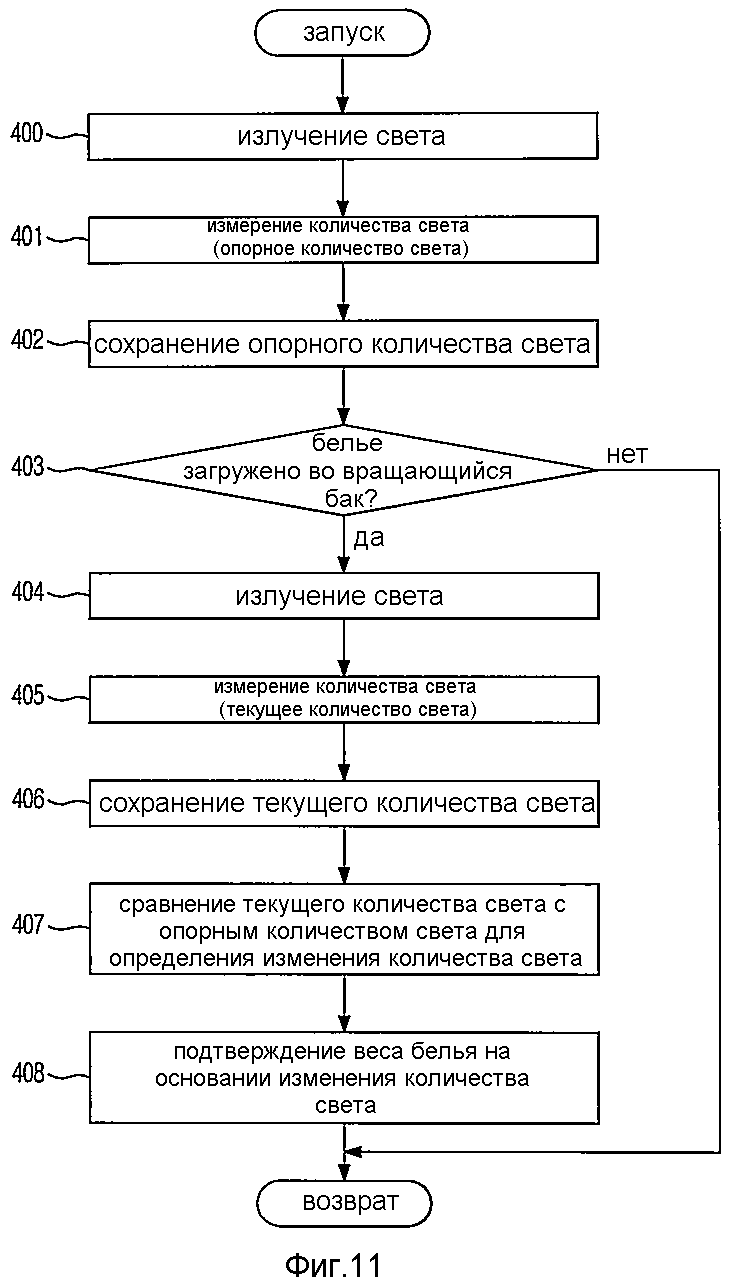
Фиг.11 - схема последовательности операций, иллюстрирующая процесс определения изменения количества света на основании высоты подъема бака для воды, которая изменяется в зависимости от веса белья, в стиральной машине барабанного типа, изображенной на фиг.9, для измерения веса белья.
Как показано на фиг.11 вместе с фиг.10, устройство 300 управления излучает свет при помощи светоизлучающего узла 210 сенсорного модуля 200 перед загрузкой белья во вращающийся бак 30 (400).
После излучения света устройство 300 управления измеряет количество света, полученного светоприемным узлом 220 сенсорного модуля 200, при помощи светоприемного узла 220 (401). При этом свет, излучаемый светоизлучающим узлом 210, блокируется баком 20 для воды и, таким образом, не принимается светоприемным узлом 220. Следовательно, оставшееся количество света, излучаемого светоизлучающим узлом 210, за исключением части света, блокируемой баком 20 для воды, принимается светоприемным узлом 220, в результате чего измеряется относительно небольшое количество света.
После измерения количества света устройство 300 управления сохраняет измеренное количество света в памяти 310 в качестве опорного значения количества света (402). Опорным количеством света является количество света, излучаемое светоизлучающим узлом и получаемое светоприемным узлом, когда белье не размещено во вращающемся баке 20. Понятно, что операции 401-402 могут быть исключены. Однако опорное количество света может быть предварительно сохранено или загружено с использованием проводной или беспроводной сети.
Устройство 300 управления определяет, было ли загружено белье во вращающийся бак 30 (403).
После определения в операции 403, что белье не было загружено во вращающийся бак 30, устройство 300 управления возвращается к заданной программе.
С другой стороны, после определения в операции 403, что белье было загружено во вращающийся бак 30, устройство 300 управления излучает свет при помощи светоизлучающего узла 210 сенсорного модуля 200 (404).
После излучения света устройство 300 управления измеряет количество света, полученное светоприемным узлом 220 сенсорного модуля 200, при помощи светоприемного узла 220 (405). При этом большее количество света принимается светоприемным узлом 220, чем перед загрузкой белья во вращающийся бак 30. Причина состоит в том, что при загрузке белья во вращающийся бак 30 бак 20 для воды опускается в направлении, указанном стрелкой на фиг.10 в соответствии с весом белья, в результате чего часть света, блокируемая баком 20 для воды, принимается светоприемным узлом 220. Чем тяжелее белье, тем больше количества света принимается светоприемным узлом 220.
После измерения количества света устройство 300 управления сохраняет измеренное количество света в памяти 310 в качестве текущей величины количества света (406).
Затем устройство 300 управления сравнивает текущее количество света с опорным количеством света, сохраненным в памяти 310, для определения изменения количества света (407).
Затем устройство 300 управления считывает вес белья, соответствующий измеренному количеству света, из памяти 310 для измерения веса белья (408).
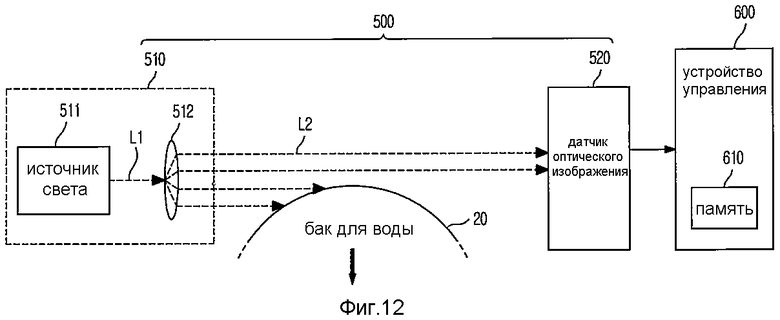
Фиг.12 - блок-схема управления стиральной машины барабанного типа, содержащей датчик оптического изображения, для определения изменения оптического изображения вместо приемного узла сенсорного модуля, которая является модификацией стиральной машины барабанного типа, изображенной на фиг.9. Фиг.13 - вид, иллюстрирующий оптические изображения на основании веса белья, определяемые датчиком оптического изображения на фиг.12.
Как показано на фиг.12, сенсорный модуль 500 включает в себя узел 510 источника света и датчик 520 оптического изображения.
Узел 510 источника света включает в себя источник 511 света и линзу 512. Источник 511 света может состоять из светодиода или лазера. Источник 511 света излучает свет. Линза 512 рассеивает свет, излучаемый источником 511 света таким образом, что рассеянный свет принимается датчиком 520 оптического изображения. Вместо линзы 512 может быть установлено множество источников 511 света.
Устройство 600 управления взаимодействует с сенсорным модулем 500 для приема оптического изображения с датчика 520 оптического изображения и считывает вес белья, соответствующий полученному оптическому изображению, из памяти 610 для измерения веса белья. Память 610 предварительно сохраняет вес белья на основании оптических изображений, которые являются формами светоизлучения узла источника света в соответствии с высотой подъема бака 20 для воды. Как показано на фиг.13, оптическое изображение, соответствующее высоте подъема бака 20 для воды, постепенно принимает форму круга при увеличении веса белья.
Как понятно из вышеприведенного описания, изменение изображения или изменение количества света на основании смещения объекта, которое изменяется в зависимости от веса белья, определяются для измерения веса белья, таким образом повышая надежность измерения веса белья.
Хотя было описано несколько вариантов осуществления, специалисты в данной области техники должны понимать, что возможны изменения в этих вариантах осуществления без отхода от принципов и сущности настоящего изобретения, объем которого определен в формуле изобретения и ее эквивалентах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТИРАЛЬНАЯ МАШИНА И ЕЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КОЛИЧЕСТВА БЕЛЬЯ | 2010 |
|
RU2466226C2 |
| БАЛАНСИР И СТИРАЛЬНАЯ МАШИНА, СОДЕРЖАЩАЯ ТАКОЙ БАЛАНСИР | 2013 |
|
RU2617380C2 |
| СТИРАЛЬНАЯ МАШИНА | 2014 |
|
RU2639265C2 |
| БАЛАНСИР И СТИРАЛЬНАЯ МАШИНА С ТАКИМ БАЛАНСИРОМ | 2014 |
|
RU2617377C2 |
| БАЛАНСИР И СТИРАЛЬНАЯ МАШИНА С ТАКИМ БАЛАНСИРОМ | 2014 |
|
RU2619027C2 |
| СИСТЕМА УПРАВЛЕНИЯ СТИРАЛЬНОЙ МАШИНОЙ И СПОСОБ УПРАВЛЕНИЯ СТИРАЛЬНОЙ МАШИНОЙ | 2014 |
|
RU2571263C2 |
| СТИРАЛЬНАЯ МАШИНА | 2012 |
|
RU2585711C2 |
| СТИРАЛЬНАЯ МАШИНА | 2016 |
|
RU2664818C1 |
| СТИРАЛЬНАЯ МАШИНА | 2009 |
|
RU2497991C2 |
| СТИРАЛЬНАЯ МАШИНА | 2002 |
|
RU2216615C1 |
Стиральная машина содержит объект, смещение которого изменяется в зависимости от веса белья, сенсорный модуль для определения изображения, количества света или оптического рисунка, изменяемых в зависимости от смещения объекта. Кроме того, стиральная машина содержит устройство управления для измерения веса белья на основании изменения изображения или изменения количества веса. В способе определяют изменение изображения объекта в зависимости от смещения объекта и измеряют вес белья на основании определенного изменения изображения объекта. Обеспечивается повышение надежности измерения веса белья и уменьшение расхода энергии. 2 н. и 13 з.п. ф-лы, 13 ил.
1. Стиральная машина, содержащая
объект, смещение которого изменяется в зависимости от веса белья;
сенсорный модуль для определения изображения, количества света или оптического рисунка, изменяемых в зависимости от смещения объекта; и устройство управления для измерения веса белья на основании изменения изображения или изменения количества света.
2. Стиральная машина по п.1, в которой объектом является, по меньшей мере, или подвесная пружина для поддержания бака для воды, содержащего вращающийся бак в подвешенном состоянии, или бак для воды, или амортизатор для гашения вибрации, создаваемой баком для воды, или их сочетания.
3. Стиральная машина по п.1, в которой сенсорный модуль содержит источник света для излучения света на объект, датчик изображения для приема света, отражаемого от объекта, для создания, распознавания изображения объекта, и процессор обработки изображений для выполнения сравнения между опорным изображением, которым является изображение перед загрузкой белья во вращающийся бак, и текущим изображением, которым является изображение после загрузки белья во вращающийся бак, для определения изменения изображения объекта.
4. Стиральная машина по п.3, в которой процессор обработки изображений устанавливает окно шаблона заданного размера на опорном изображении, рассчитывает значения коэффициента корреляции при перемещении окна шаблона относительно всего текущего изображения на произвольное количество пикселей, рассчитывает величину смещения окна шаблона относительно положения, имеющего наибольшее значение коэффициента корреляции, и распознает рассчитанную величину смещения в качестве величины изменения изображения объекта.
5. Стиральная машина по п.4, в которой, если объектом является амортизатор, сенсорный модуль расположен на амортизаторе для определения изменения изображения амортизатора в зависимости от смещения амортизатора.
6. Стиральная машина по п.5, в которой амортизатор содержит цилиндр и поршень, установленный в цилиндре с возможностью перемещения вперед и назад, и сенсорный модуль расположен на цилиндре или поршне для определения изменения изображения цилиндра или поршня в зависимости от смешения цилиндра или поршня.
7. Стиральная машина по п.4, в которой, если объектом является бак для воды, сенсорный модуль расположен на корпусе стиральной машины, соответствующем баку для воды, для определения изменения изображения бака для воды в зависимости от смещения бака для воды.
8. Стиральная машина по п.7, в которой сенсорный модуль определяет изменение изображения бака для воды в зависимости от вертикального смещения бака для воды.
9. Стиральная машина по п.4, в которой, если объектом является подвесная пружина, сенсорный модуль расположен на подвесной пружине для определения изменения изображения подвесной пружины в зависимости от смещения подвесной пружины.
10. Стиральная машина по п.1, в которой
объектом является бак для воды,
сенсорный модуль содержит светоизлучающий узел для излучения света и светоприемный узел для приема света, излучаемого светоизлучающим узлом, причем сенсорный модуль расположен таким образом, что количество света, соответствующее смещению бака для воды, принимаемое светоприемным узлом, изменяется, и устройство управления измеряет вес белья на основании изменения количества света, полученного светоприемным узлом.
11. Стиральная машина по п.10, в которой светоизлучающий узел содержит источник света для излучения света и линзу для рассеивания света, излучаемого источником света, так что свет одновременно направляется в светоприемный узел.
12. Стиральная машина по п.1, в которой
объектом является бак для воды,
сенсорный модуль содержит узел источника света для излучения света и датчик оптического изображения для приема света, излучаемого узлом источника света, причем сенсорный модуль расположен таким образом, что оптическое изображение, соответствующее смещению бака для воды, определяемое датчиком оптического изображения, изменяется, и устройство управления измеряет вес белья на основании оптического изображения, определенного датчиком оптического изображения.
13. Способ управления стиральной машиной, содержащей объект, смещение которого изменяется в зависимости от веса белья, причем согласно способу
определяют изменение изображения объекта в зависимости от смещения объекта; и
измеряют вес белья на основании определенного изменения изображения объекта.
14. Способ управления по п.13, согласно которому объектом является, по меньшей мере, или подвесная пружина для поддержания бака для воды, содержащего вращающийся бак в подвешенном состоянии, или бак для воды, или амортизатор для гашения вибрации, создаваемой баком для воды, или их сочетания.
15. Способ управления по п.14, согласно которому при определении изменения изображения объекта устанавливают окно шаблона заданного размера на опорном изображении, которое является изображением объекта перед загрузкой белья во вращающийся бак, рассчитывают значения коэффициента корреляции при перемещении окна шаблона относительно всего текущего изображения, которое является изображением после загрузки белья во вращающийся бак, на произвольное количество пикселей, и рассчитывают величину смещения окна шаблона относительно положения, имеющего наибольшее значение коэффициента корреляции.
| Способ скручивания чая | 1984 |
|
SU1243686A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| FR 2898912 А1, 28.09.2007 | |||
| Многоканальный сигнатурный анализатор | 1984 |
|
SU1167609A1 |
| RU 2008117471 A, 10.11.2009. | |||

