Область техники, к которой относится изобретение
Настоящее изобретение относится к системам и способам сканирования для ориентирования множества данных сканирования относительно базовых эталонных данных. Это изобретение имеет конкретную, хотя не исключительную, полезность для измерения поверхностей, где выравнивание множества данных сканирования относительно базовых эталонных данных является неизвестным. Оно также является релевантным для идентификации признаков во множестве данных сканирования поверхности посредством использования средства разбиения.
Всюду по описанию, если контекст не требует иначе, слово "содержать" или вариации, такие как "содержит" или "содержащий", будет пониматься как включающее в себя заявляемое целое или группу целых, но не исключающее какое-либо другое целое или группу целых.
Уровень техники
Последующее описание уровня техники предназначено, чтобы только способствовать пониманию настоящего изобретения. Это описание не является признанием или допущением, что что-либо из указанного материала является или было частью обычного общего знания как на дату приоритета этой заявки.
Заявитель ранее раскрыл систему для измерения и преобразования поверхности относительно эталонной поверхности в публикации WO 2007/000010. Система, среди прочего, обеспечивает использование сканера, чтобы собирать множество данных сканирования, и затем измерять и преобразовывать это множество данных сканирования относительно эталонной поверхности, что в описанных конкретных вариантах осуществления является внутренней поверхностью ротационного цилиндрического измельчителя. Как там раскрыто, несмотря на то, что сканер помещается настолько близко к центру измельчителя, насколько возможно, позиционирование никогда не будет точным. Соответственно, базовые эталонные данные и множество данных сканирования должны выравниваться с наибольшей степенью точности, которая является достижимой.
При измельчении минералов в добывающей промышленности раздробленная руда разделяется на куски и может затем направляться в ротационные цилиндрические измельчители. Ротация измельчителя вокруг своей оси побуждает куски руды рушиться под силой тяжести, таким образом, размельчая руду во все более мелкие части. В некоторые типы размельчающих измельчителей монтируют вторичные системы размельчения, такие как железные или стальные шары (шаровые измельчители), стальные стержни (стержневые измельчители) или кремневые гальки (галечные измельчители), которые способствуют процессу размельчения.
Точное измерение износа в измельчителе является особенно важным, так как стоимость некорректного прогнозирования, какие подкладки заменить, является большой. Если природа износа может быть идентифицирована точно, шаблоны износа могут также быть идентифицированы, чтобы оптимизировать работу измельчителя.
Другие измерения, такие как объем вторичной системы размельчения, размер ее компонентов и размер систем экранирования внутри разгрузочной конструкции, также являются трудными для измерения.
Текущие средства измерения объема шаровой загрузки достигаются с использованием мер ручной ленты, чтобы измерять расстояние от поверхности шаровой загрузки до некоторой оцененной продольной центральной оси и чтобы измерять диагональное расстояние через поверхность от одного угла до другого.
Эти измерения затем используются, чтобы вычислять объем с использованием простой геометрии. Проблема с этим способом заключается в том, что поверхность никогда не является идеально плоской и базовые эталонные данные не известны. Например, границы подкладок, покрытых шаровой загрузкой, являются плохо обозначенными. Если эталонная плоскость, выше которой находится поверхность шаровой загрузки, точно не известна, то вычисление объема шаровой загрузки будет неизбежно неточным.
Объем шаровой загрузки является важным фактором в достижении оптимального размельчения и выработки из измельчителя. Были получены сведения о том, что изменение, составляющее только 4% от оптимальной шаровой загрузки, уменьшает пропускную способность на 5%-10%. Повышение точности этого измерения будет улучшать уровень управления и производительности измельчителя.
Более того, нет известного способа определения того, какая пропорция оставшихся объектов в измельчителе может быть отнесена к размельчаемым материалам в противоположность объектам вторичной системы размельчения. Один способ измерения отношения стальных шаров к руде заключается в том, чтобы опорожнить измельчитель, разделить компоненты и взвесить их. Другой известный способ заключается в том, чтобы наблюдать общие массовые потоки руды, воды и шаров в измельчитель. Однако сложно разделять эти компоненты друг от друга в выходящих потоках, поэтому наилучшим достигаемым результатом является грубая оценка. Отношение шара к руде является очень важным для оптимальной производительности измельчителя. Если руды слишком много, то для шаров требуется больше времени, чтобы раздробить ее до надлежащего размера, и пропускная способность является ограниченной. Если слишком много шаров относительно руды, то имеется риск их воздействия на оголенные подкладки и значительного увеличения скорости изнашивания.
В случае измерения размера компонентов или объектов, которые составляют вторичную систему размельчения, оптимальный способ измерения их индивидуального размера отсутствует. Для шаровой системы размельчения единственным известным способом измерения размера этих шаров является физическое удаление их из измельчителя и, как упомянуто выше, их индивидуальное измерение. Это является непрактичным для работы с измельчителем вследствие значительного вытекающего в результате времени простоя.
Шары могут добавляться в измельчители ежесуточно и количество и размер являются критическим параметром производительности. Размер шаров является важным, так как по мере того, как шары изнашиваются и уменьшаются в размере, их сила воздействия уменьшается и они являются менее эффективными в разбивании пород. Обычно, если диаметр сферы уменьшен до его половины исходного размера, масса будет снижена на коэффициент 8. В этой точке стальной шар считается неэффективным и просто занимает ценное пространство в измельчителе, ограничивая выработку. Меньшие по размеру шары будут также вырабатывать более мелкий продукт, а конструкция системы высвобождения минерала на выходе из измельчителя является высокочувствительной к размеру размельченного продукта. Соответствие размера шара размеру продукта и управление этими параметрами являются часто критическими для получаемого в результате минерала.
В заключение, измерение размера системы экранирования, применяемой в измельчителе, является важным для оценки производительности измельчителя. Решетки, составляющие систему экранирования, сдерживают размельчающие агенты. По мере того как отверстия решетки будут изнашиваться, они будут пропускать более крупные размельчающие агенты и снижать эффективность процесса размельчения. Единственным известным способом измерения этих решеток является обеспечение вручную доступа к измельчителю и измерение каждого отдельного отверстия решетки. Обычно в каждом измельчителе имеется несколько сотен отверстий решетки. Из-за повторно совершаемых измерений вручную сотен решеток также высока возможность ошибки человека.
Раскрытие изобретения
Целью настоящего изобретения является устранение или преодоление, по меньшей мере, одной из вышеупомянутых проблем, связанных с измерением измельчителя предшествующего уровня техники, или, по меньшей мере, предоставление практичного выбора альтернативной системы для измерения измельчителя.
Однако в связи с вышеупомянутой задачей следует принять во внимание, что настоящее изобретение никоем образом не ограничивается исключительно применением для измерения подкладки измельчителя и может иметь другие применения, как описано в описании.
В соответствии с одним аспектом настоящего изобретения, обеспечивается система для ориентирования множества данных сканирования поверхности относительно базовых эталонных данных, содержащая генератор входного источника, выполненный с возможностью обеспечивать упомянутое множество данных сканирования; средство коррекции наклона для ориентирования упомянутого множества данных о точках относительно базовых эталонных данных и средство редактирования данных, чтобы фильтровать ложные данные о точках из накопленного множества данных о точках, при этом упомянутые базовые эталонные данные представляют, по меньшей мере, критические геометрические параметры базового эталона, при этом базовый эталон является, по существу, отличным от целевой поверхности.
Предпочтительно, упомянутые базовые эталонные данные содержат ключевые эталонные данные, чтобы описывать геометрию базового эталона.
Предпочтительно, целевая поверхность и базовый эталон указываются в их собственной соответствующей координатной системе.
Предпочтительно, базовый эталон представляет заключенное пространство.
Предпочтительно, заключенное пространство ограничено, по существу, цилиндрической оболочкой с противоположными концами.
Предпочтительно, базовый эталон дополнительно содержит критические параметры, определяющие местоположение центральной продольной оси оболочки, радиус оболочки и длину цилиндрической части оболочки.
Предпочтительно, средство редактирования данных дополнительно включает в себя средство разбиения, чтобы разбивать упомянутое множество данных о точках на дискретные сегменты, соответствующие разным геометрическим секциям упомянутой поверхности.
Предпочтительно, средство редактирования данных выполнено с возможностью работать до средства коррекции наклона.
Предпочтительно, средство редактирования данных включает в себя, по меньшей мере, один или более из следующих процессов: (i) структурный фильтр сканера, чтобы удалять точки, могущие быть отнесенными к любому поддерживающему средству, используемому, чтобы располагать, стабилизировать или защищать сканирующее средство; (ii) фильтр интенсивности, чтобы удалять любую точку в накопленное множество данных о точках выше порогового значения интенсивности; и (iii) диапазонный фильтр, чтобы удалять любую точку, меньшую чем минимальный или большую чем максимальный порог в накопленное множество данных о точках.
Предпочтительно, упомянутые базовые эталонные данные включают в себя переменные радиуса и длины, и при этом упомянутый диапазонный фильтр выводит порог из упомянутого радиуса и упомянутой длины.
Предпочтительно, средство коррекции наклона включает в себя средство ориентирования множества данных о точках, при этом упомянутое средство ориентирования множества данных о точках содержит: средство временного удаления точек для временного удаления точек, которые являются, по существу, продольно параллельными точкам, удаленным структурным фильтром сканера; средство величин ротации, чтобы вычислять величины ротации, применимые к множеству данных сканирования; процесс ротации множества данных сканирования и средство восстановления точек, в силу чего точки, удаленные средством временного удаления точек, восстанавливаются в накопленное множество данных о точках.
Предпочтительно, упомянутое средство ориентирования множества данных о точках включает в себя программную утилиту величин ротации, содержащую:
процесс параллельного перемещения, чтобы параллельно перемещать множество данных сканирования с использованием сокращения центра масс
 где
где  ; и
; и
процесс вычисления, чтобы определять величины ротации посредством разложения по собственным значениям ковариационной матрицы множества данных сканирования
Λ = MCMT,
где 
Предпочтительно, программная утилита величин ротации выполнена с возможностью ротации накопленного множества данных сканирования, при этом упомянутая программная утилита величин ротации содержит:
процесс ротации для ротации значений, так чтобы x-продольная, y-поперечная и z-высотная оси совпадали 
где M - это величина ротации, вычисленная упомянутым средством величин ротации.
Предпочтительно, средство коррекции наклона включает в себя программную утилиту коррекции наклона для определения и корректировки любого остаточного наклона в накопленное множество данных сканирования вокруг оси, содержащее:
процесс извлечения, чтобы извлекать временный набор точек (p) внутри набора ограничений:

процесс вычитания, чтобы вычитать среднюю x координату из временного набора точек:
 , где
, где 
формирование следующего 2D линейного уравнения для каждой точки в результирующем временном наборе точек:
вычисление наименьших квадратов, чтобы вычислять оценку наименьших квадратов наклона, m, как:
процесс вычисления угла ротации, чтобы вычислять угол φ ротации как:
φ = arctan(m)
процесс ротации накопленных точек сканирования для ротации накопленных данных точек сканирования:
 , где
, где
Предпочтительно, упомянутое средство разбиения включает в себя, по меньшей мере, один или более из следующих процессов: (i) средство сегментации противоположного конца, при этом упомянутое средство сегментации противоположного конца включает в себя, по меньшей мере, один или более из следующих процессов: a) средство сегментации плоского конца, чтобы сегментировать точки в накопленное множество данных о точках, когда упомянутые базовые эталонные данные обозначают, по существу, плоский конец; и b) средство сегментации конического конца, чтобы сегментировать точки в накопленное множество данных о точках, когда упомянутые базовые эталонные данные обозначают, по существу, конический конец; (ii) средство сегментации плавающих объектов, чтобы сегментировать точки в накопленное множество данных о точках, могущих быть отнесенными к объектам, которые нефиксированно соединены с упомянутой поверхностью; и (iii) средство сегментации внутренней части, чтобы сегментировать точки в накопленное множество данных о точках, могущих быть отнесенными к упомянутой цилиндрической оболочке.
Предпочтительно средство сегментации плоского конца и средство сегментации конического конца включает в себя программную утилиту сегментации концов, содержащее: процесс вычисления частоты, чтобы вычислять частоту каждой продольной координаты внутри накопленного множества данных о точках; процесс вычисления наибольшей частоты, чтобы определять наибольшую упомянутую частоту положительной и отрицательной продольных координат; процесс добавления порога, чтобы добавлять пороговое значение к упомянутым наибольшим отрицательному и положительному частотным значениям, и в силу чего упомянутое средство сегментации конического конца дополнительно содержит: процесс вычисления местоположений минимумов, чтобы сканировать упомянутые продольные координатные частоты, чтобы определять местоположения минимумов из упомянутых наибольших отрицательного и положительного частотных значений в направлении местоположения упомянутого сканера, процесс сегментации, чтобы сегментировать точки в накопленное множество данных о точках, могущих быть отнесенными к плоским концам, согласно упомянутым местоположениям минимумов; и в силу чего упомянутое средство сегментации конического конца использует наибольшие отрицательное и положительное частотные значения процесса вычисления местоположений минимумов, чтобы сегментировать точки в накопленное множество данных о точках, могущих быть отнесенными к коническим концам.
Предпочтительно, система дополнительно включает в себя средство измерения нефиксированно соединенного объема, чтобы измерять объем объектов, которые нефиксированно соединены с упомянутой поверхностью.
Предпочтительно, система дополнительно включает в себя средство измерения отверстий, чтобы измерять размер отверстий в упомянутой поверхности.
Предпочтительно, средство измерения нефиксированно соединенного объема дополнительно содержит средство различения шаров от руды, чтобы измерять отношение набора шаров к нешаровым материалам.
Предпочтительно, средство измерения нефиксированно соединенного объема дополнительно содержит средство измерения размера шаров, чтобы измерять размер набора шаров внутри цилиндрической оболочки.
Предпочтительно, упомянутое средство сегментации плавающих объектов включает в себя программную утилиту плавающих объектов, которая работает после того, как упомянутое средство сегментации противоположного конца повлияло на упомянутое множество данных сканирования, при этом упомянутая программная утилита плавающих объектов содержит:
процесс вычисления частоты радиуса, чтобы вычислять частоту каждого значения цилиндрического радиуса в накопленном множестве данных сканирования;
процесс определения пиковых значений, чтобы определять пиковое значение частот цилиндрических радиусов и точек сегментации на основе упомянутого пикового значения;
процесс подгонки сегментации, чтобы подгонять все сегментированные точки к плоскости посредством базирующегося на собственных значениях разложения;
процесс параллельного перемещения множества данных сканирования, чтобы параллельно перемещать множество данных сканирования из m точек в центр масс
 где
где 
процесс разложения по собственным значениям, чтобы определять разложение по собственным значениям ковариационной матрицы
Λ = MCMT,
где 
модель плоскости задается посредством ax+by+cz-d=0, где (a, b, c) - это элементы собственного вектора, соответствующего наименьшему собственному значению, и 
процесс вычисления остаточного отклонения, чтобы вычислять остаточное отклонение, v, от плоскости наилучшей подгонки для каждой точки:

процесс отбрасывания точек, чтобы отбрасывать точки выше плоскости на основе стандартного отклонения остатков.
Предпочтительно, упомянутое средство сегментации внутренней части включает в себя программную утилиту сегментации внутренней части, содержащую:
процесс уточнения центра масс, чтобы уточнять центр масс множества точек на продольной оси посредством вычисления среднего значения на любом конце упомянутой, по существу, цилиндрической оболочки с использованием равного количества точек
 так что
так что 
и
 так что
так что 
где - и + указывают на точки из левого и правого концов множества точек подкладки внутренней части, соответственно;
процесс параллельного перемещения множества данных сканирования, чтобы параллельно перемещать все множество данных сканирования посредством этих двух средств
 где
где  ;
;
процесс обозначения границ круга, чтобы обозначать границы круга на каждом конце упомянутой, по существу, цилиндрической оболочки, при этом упомянутый круг является кругом пересечения поверхности цилиндрической внутренней части упомянутых базовых эталонных данных и поверхности конического или плоского конца базовых эталонных данных;
процесс обозначения границ конуса, чтобы обозначать границы конуса с этим кругом как основу и вершину на стороне внутренней части круга, имеющего половину угла при вершине 45°;
процесс назначения точек, чтобы назначать каждую точку внутри конуса заданному концу упомянутой, по существу, цилиндрической оболочки и чтобы назначать каждую точку вне конуса упомянутой цилиндрической оболочке.
Предпочтительно, упомянутое средство сегментации внутренней части содержит процесс подгонки цилиндра, при этом упомянутый процесс подгонки цилиндра включает в себя программную утилиту подгонки цилиндра, которая работает после того, как упомянутое средство сегментации противоположного конца и упомянутое средство сегментации плавающих объектов повлияли на упомянутое множество данных сканирования, при этом упомянутая программная утилита подгонки цилиндра содержит:
процесс формирования уравнения, чтобы формировать следующее уравнение для каждой точки в накопленном множестве данных сканирования  , где вектор точки наблюдения задан посредством
, где вектор точки наблюдения задан посредством  , вектор положения цилиндра задан посредством
, вектор положения цилиндра задан посредством  и вектор оси цилиндра задан посредством
и вектор оси цилиндра задан посредством 
процесс добавления взвешенного ограничения, чтобы добавлять взвешенное ограничение a2 +b2 + c2 -1 = 0 и решение в параметрических наименьших квадратах
процесс параллельного перемещения положения цилиндра, чтобы параллельно перемещать все множество точек сканирования посредством вектора положения цилиндра 
процесс вычисления величин ротации, чтобы вычислять углы ротации, φ и κ
 и
и  и
и
процесс преобразования множества точек сканирования, чтобы преобразовывать все множество точек 
где M=R3(κ)R2(φ).
В соответствии с другим аспектом этого изобретения, обеспечивается система для идентификации признаков во множестве данных сканирования поверхности, содержащая генератор входного источника, выполненный с возможностью обеспечивать упомянутое множество данных сканирования; и средство разбиения, чтобы разбивать упомянутое множество данных о точках на дискретные сегменты, соответствующие разным геометрическим секциям упомянутой поверхности.
Предпочтительно, система дополнительно включает в себя средство измерения нефиксированно соединенного объема, чтобы измерять объем объектов, которые нефиксированно соединены с упомянутой поверхностью.
Предпочтительно, система дополнительно включает в себя средство измерения отверстий, чтобы измерять размер отверстий в упомянутой поверхности.
Предпочтительно, средство измерения нефиксированно соединенного объема дополнительно содержит средство различения шаров от руды, чтобы измерять отношение набора шаров к нешаровым материалам.
Предпочтительно, средство измерения нефиксированно соединенного объема дополнительно содержит средство измерения размера шаров, чтобы измерять размер набора шаров внутри цилиндрической оболочки.
В соответствии с дополнительным аспектом этого изобретения, обеспечивается способ для ориентирования множества данных сканирования поверхности относительно базовых эталонных данных согласно системе, описанной в предыдущем аспекте этого изобретения.
В соответствии с еще дополнительным аспектом этого изобретения, обеспечивается способ для идентификации признаков во множестве данных сканирования поверхности согласно системе, описанной в предыдущем аспекте этого изобретения.
Краткое описание чертежей
Сопровождающие чертежи иллюстрируют конкретные признаки конкретных вариантов осуществления наилучшего варианта осуществления настоящего изобретения, на которых изображено следующее.
Фиг. 1 показывает иллюстративный случай сбора множества данных сканирования с использованием генератора входного источника в форме лазерного сканера и узла стрелы.
Фиг. 2-7 показывают средство редактирования данных и компоненты процессоров преобразования программного обеспечения.
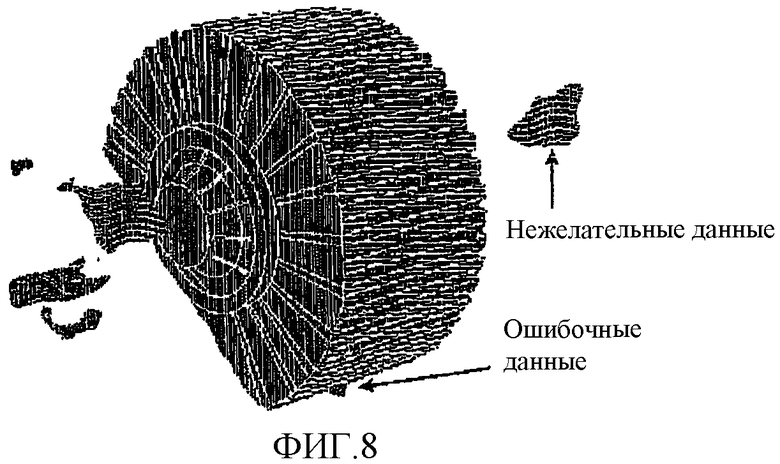
Фиг. 8 представляет 3D изображение, показывающее обычный набор точек в принятом множестве данных сканирования от сканера.
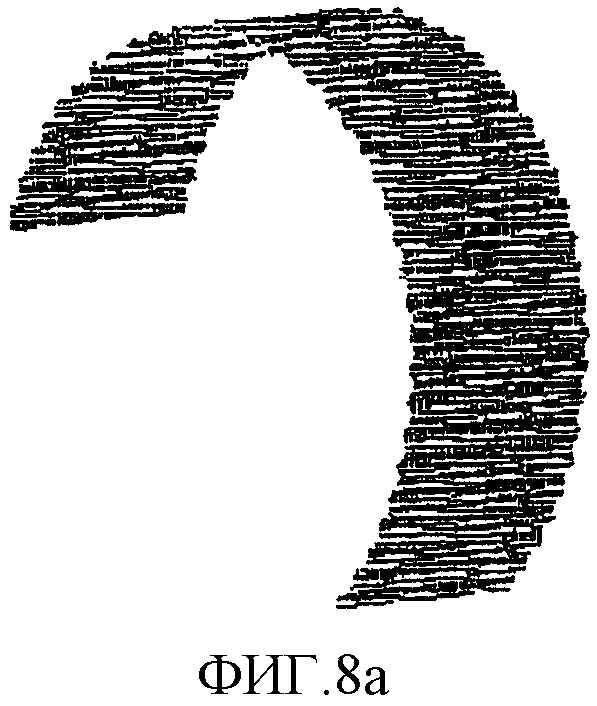
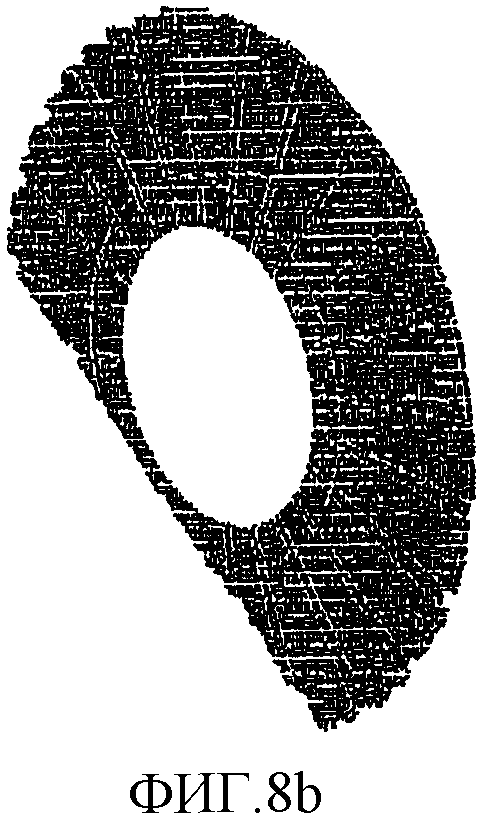
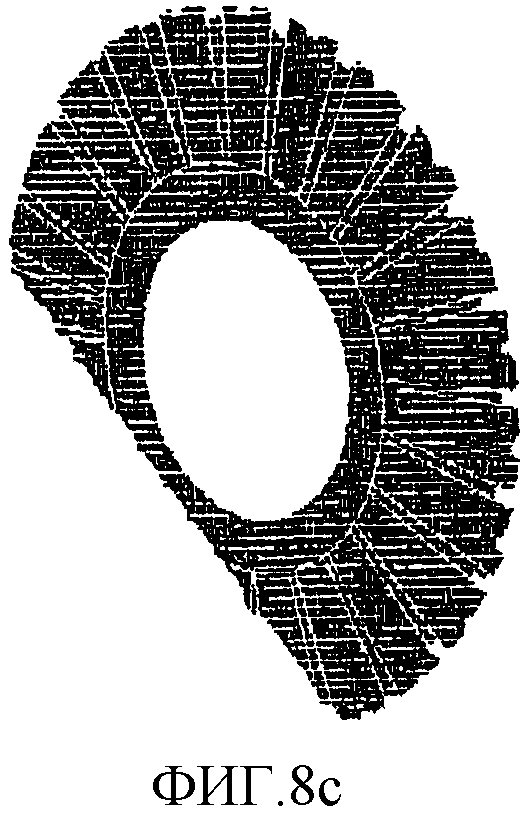
Фиг. 8a-8d представляют 3D изображения результирующего сегментированного вывода из средства редактирования данных.
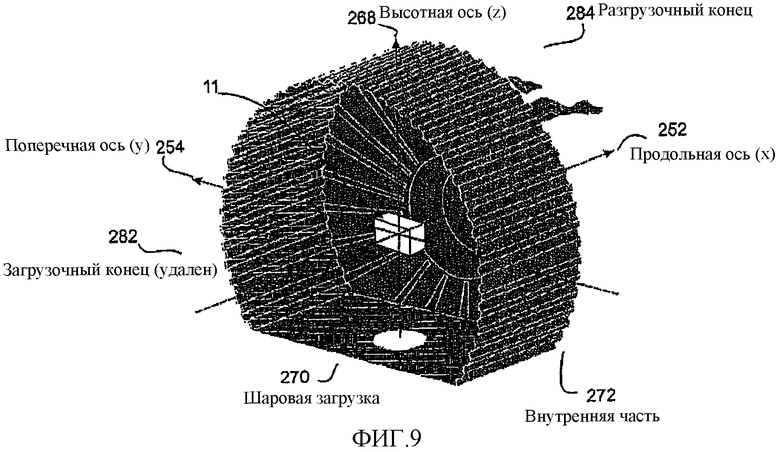
Фиг. 9 представляет вид в разрезе обычного измельчителя с лазерным сканером, помещенным приблизительно в его центре.
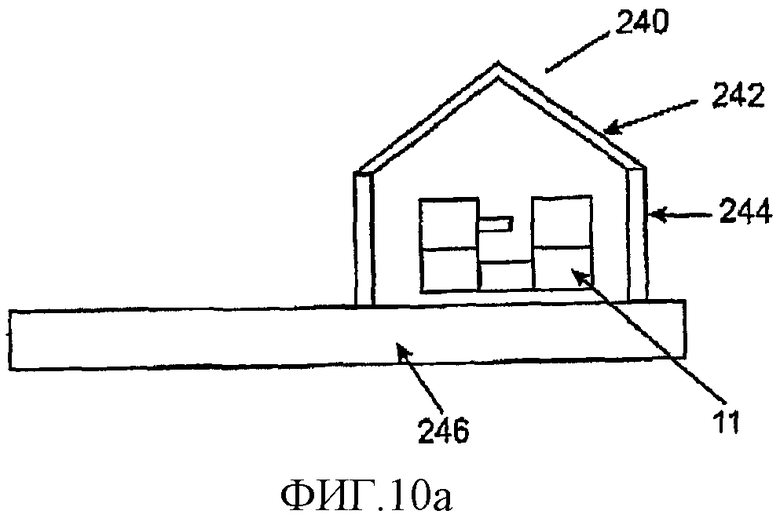
Фиг. 10a и 10b - это диаграммы, показывающие защитный кожух, используемый, чтобы укрывать лазерный сканер от случайно попадающего мусора в профиле и виде сверху соответственно.
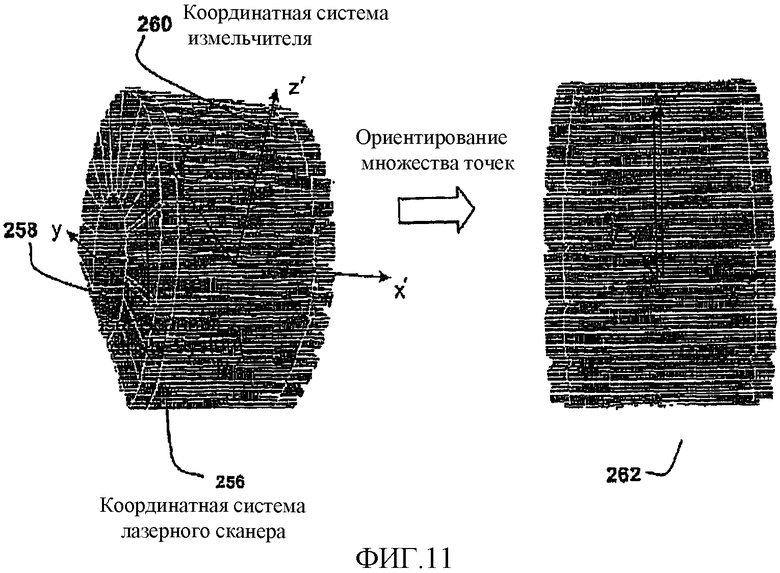
Фиг. 11 представляет визуальное изображение процесса выравнивания, используемого средством редактирования данных.
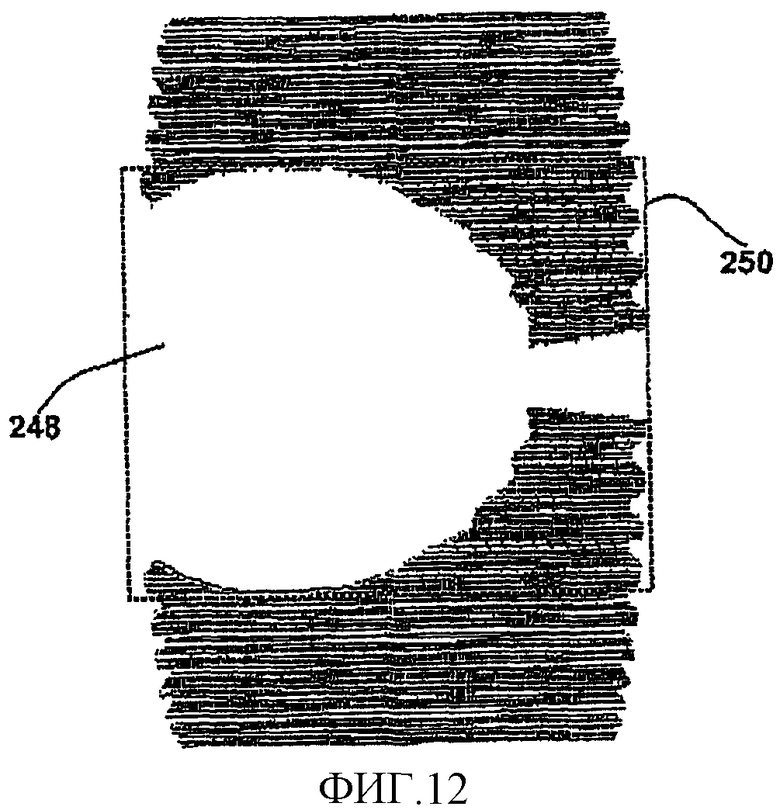
Фиг. 12 показывает удаленные точки в связи с защитным кожухом, и часть точек, удаленных для учета смещений в оценке ротации.
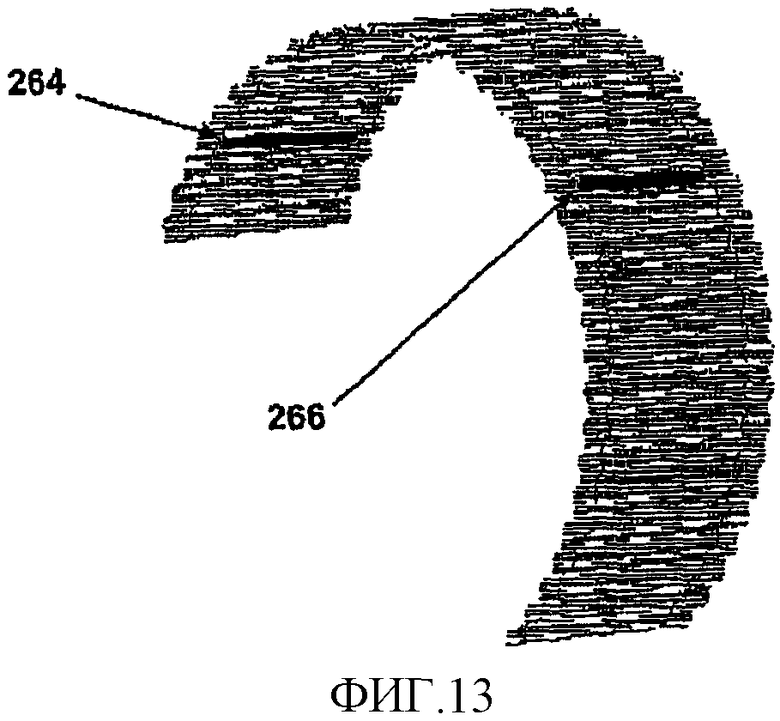
Фиг. 13 иллюстрирует способ определения и корректировки остаточного наклона вокруг поперечной и высотной осей.
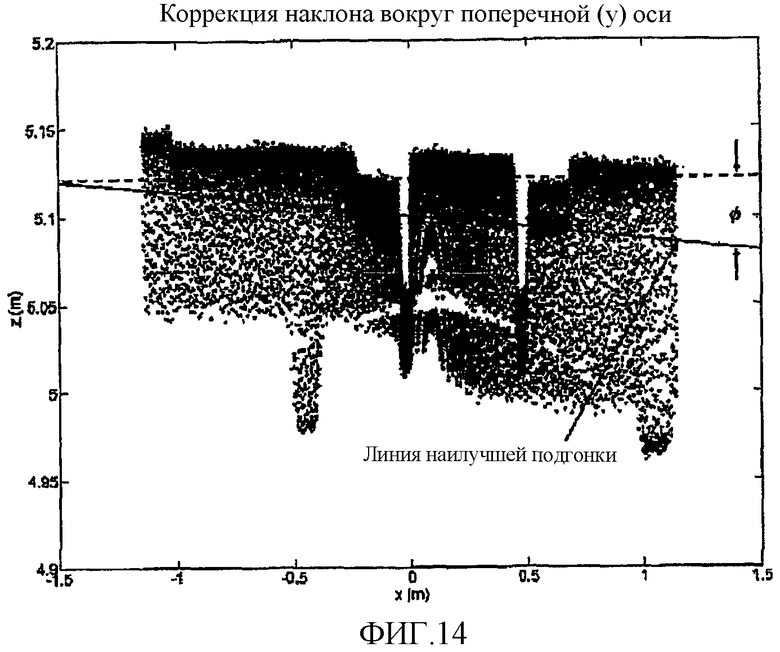
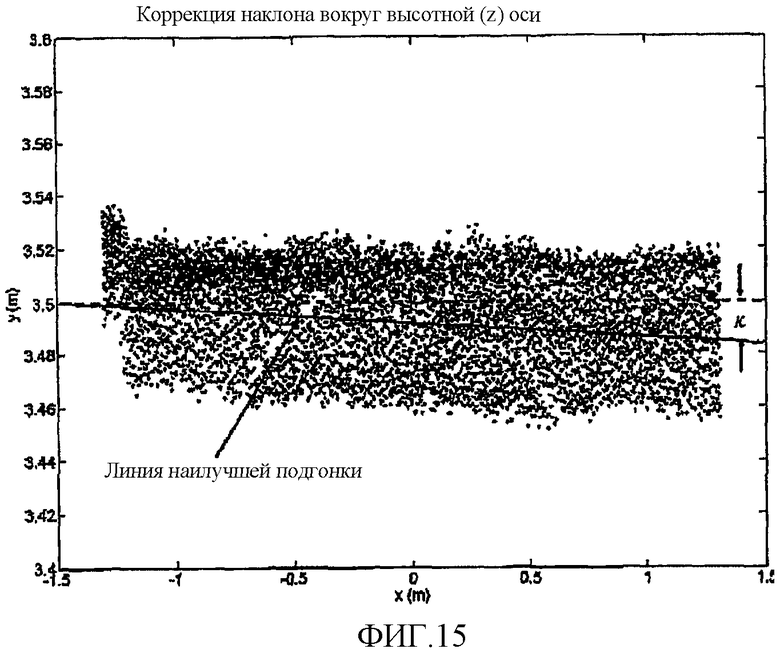
Фиг. 14 и 15 изображают данные о точках, используемые, чтобы корректировать наклон вокруг поперечной и высотной оси соответственно.
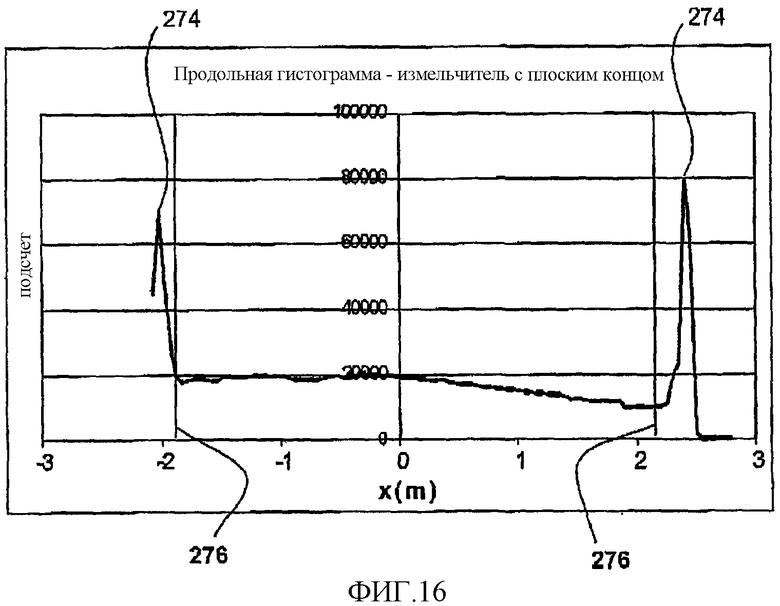
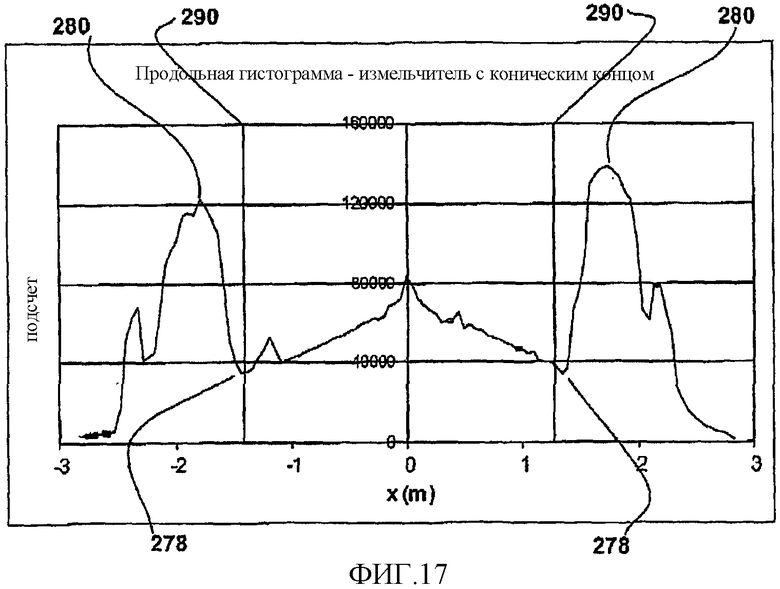
Фиг. 16 и 17 - это гистограммы, иллюстрирующие способ сегментации точек на конце измельчителя для измельчителя с плоским концом и измельчителя с коническим концом соответственно.
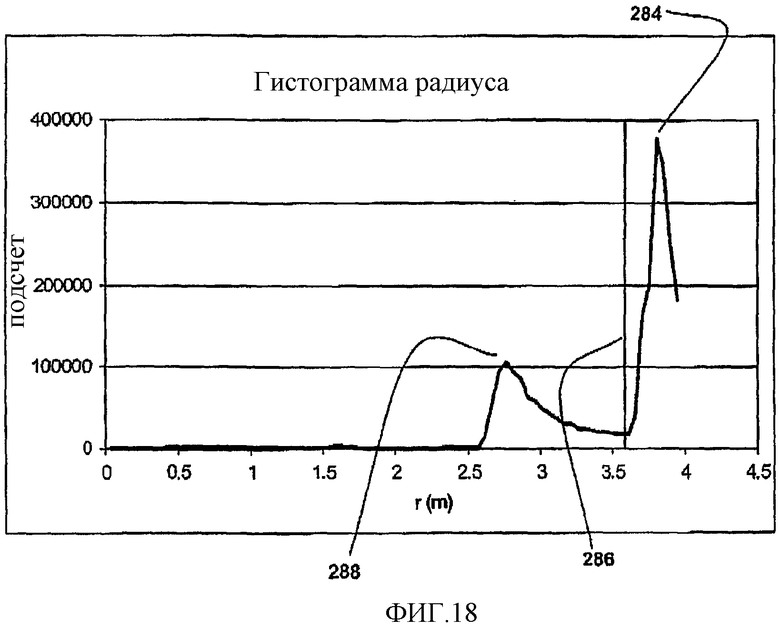
Фиг. 18 - это гистограмма, иллюстрирующая способ сегментации точек, могущих быть отнесенными к шаровой загрузке заданного измельчителя.
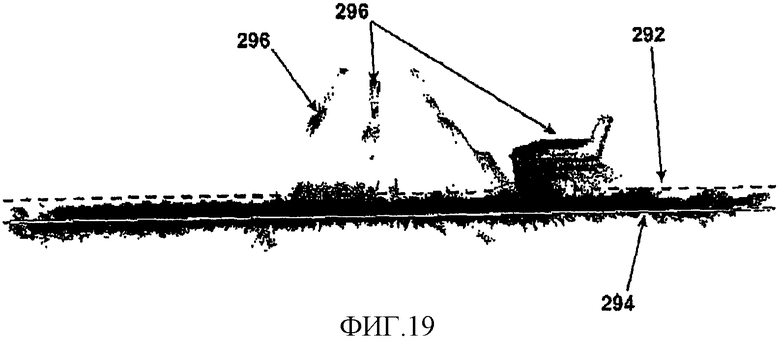
Фиг. 19 - это визуальное изображение способа подгонки точек шаровой загрузки к плоскости, чтобы удалять нежелательные точки данных.
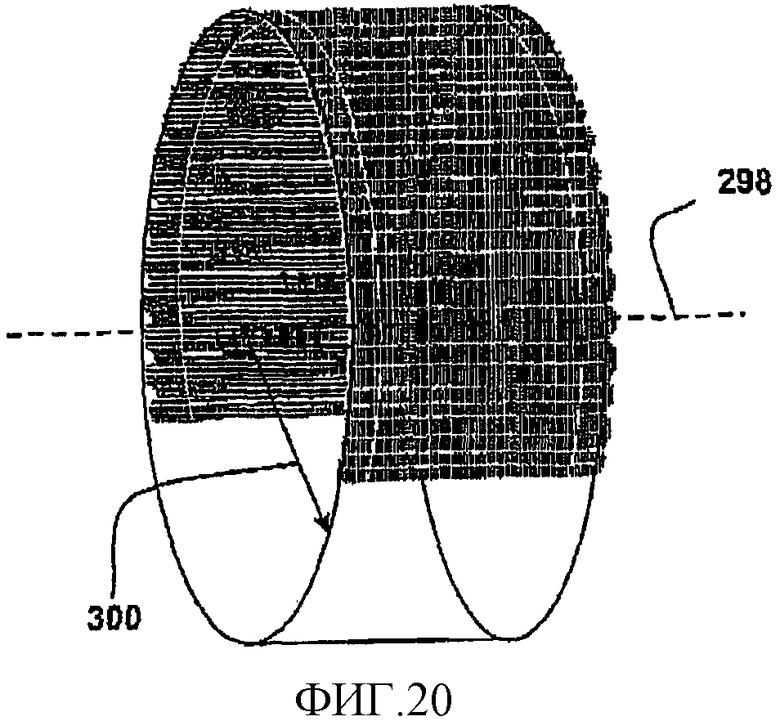
Фиг. 20 - это визуальное изображение процесса подгонки цилиндра ко всем точкам внутренней части, чтобы корректировать наклон и удалять эксцентриситеты во множестве данных сканирования.
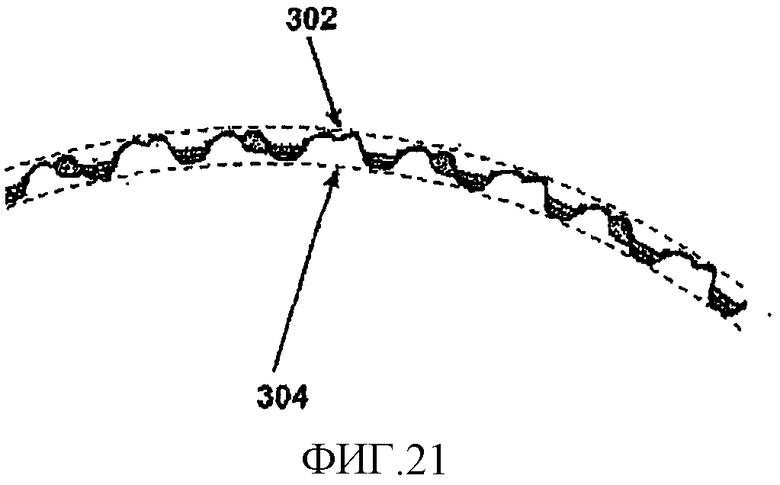
Фиг. 21 иллюстрирует способ тонкой сегментации концов внутренней части с использованием базирующихся на радиусе фильтрах.
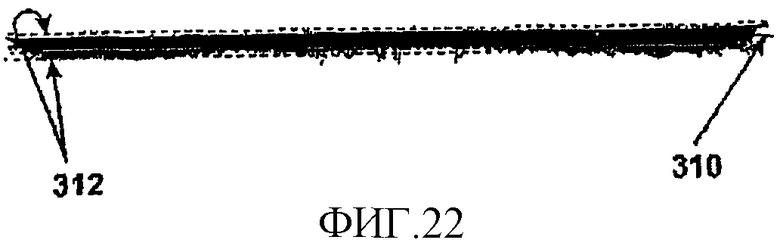
Фиг. 22 визуально изображает точки шаровой загрузки, которые подгоняются к плоскости, чтобы удалять нежелательные точки данных.
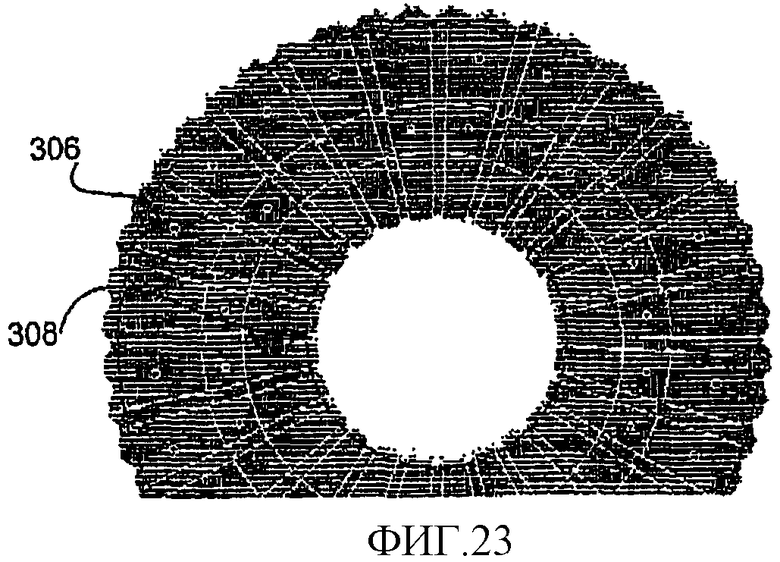
Фиг. 23 визуально изображает способ использования радиусов подкладки горловины и кольца, чтобы уточнять сегментирование точек данных.
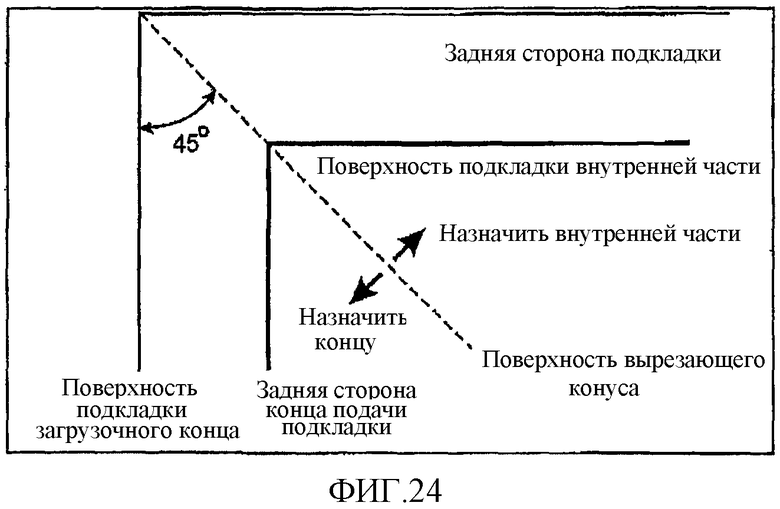
Фиг. 24 визуально изображает способ использования конической формы, чтобы дополнительно уточнять сегментацию точек между концами измельчителя и внутренней частью.
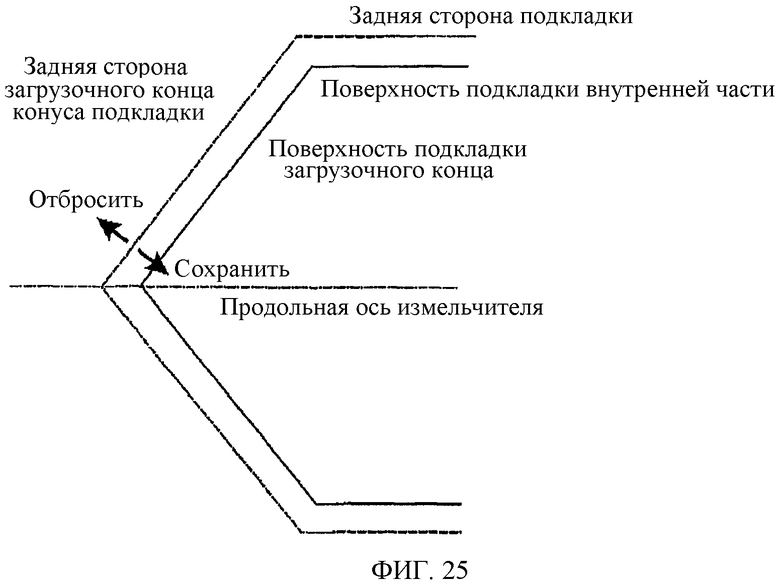
Фиг. 25 визуально изображает способ уточнения точек данных для измельчителя с коническим концом с использованием конуса поверхности задней стороны подкладки.
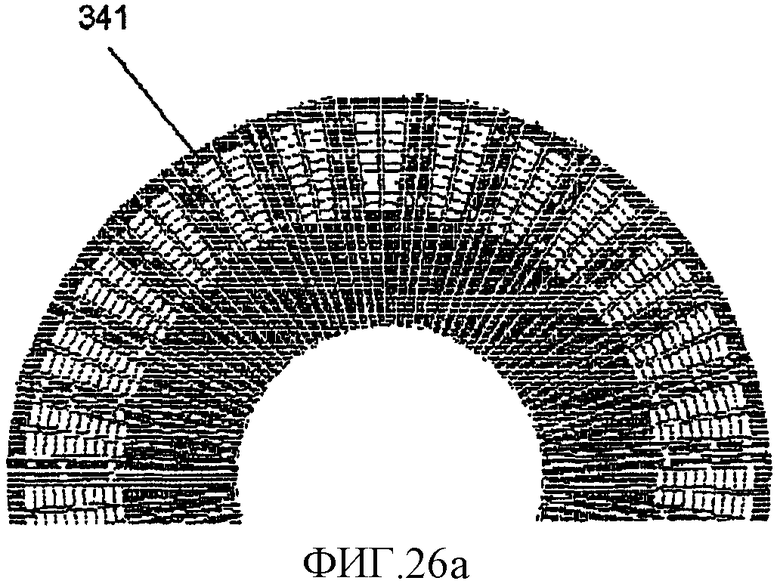
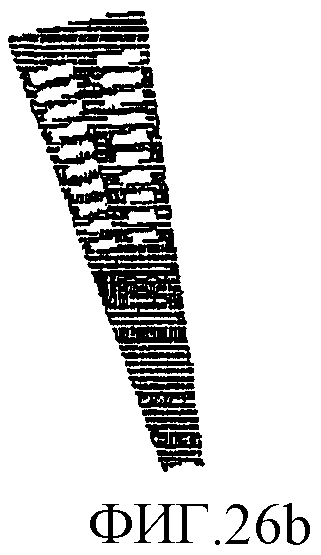
Фиг. 26a и 26b изображают подкладку на разгрузочном конце с отверстиями решетки, позволяющей проникновение раздробленной руды, и ее часть соответственно.
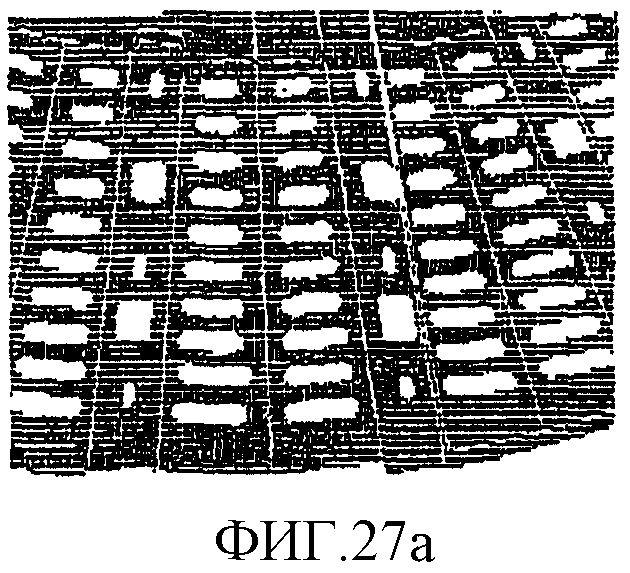
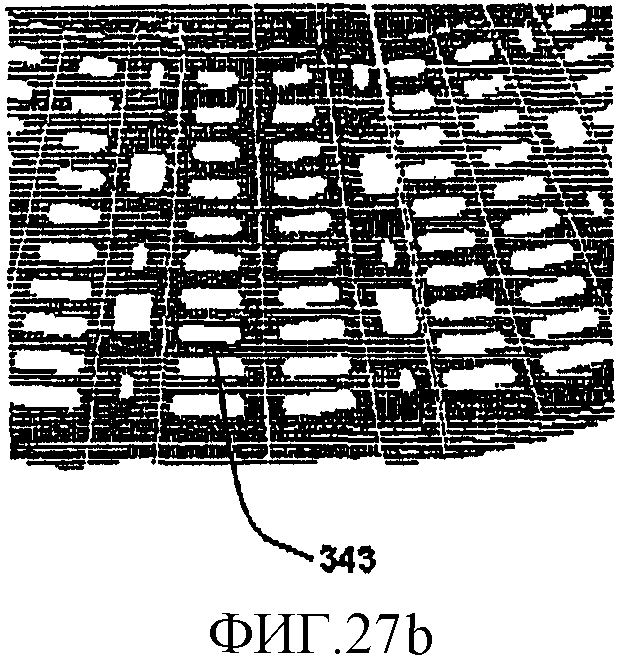
Фиг. 27a и 27b представляют сканирование множества точек части разгрузочного конца и такую же часть с обнаруженными краями для одного отверстия решетки.
Наилучший вариант (варианты) воплощения изобретения
Наилучший вариант воплощения изобретения будет теперь описан со ссылкой на один конкретный вариант его осуществления и несколько других альтернативных вариантов осуществления. В описании конкретного варианта осуществления дается ссылка на сопровождающие чертежи. Соответственно ссылочные позиции, указываемые здесь, используются на чертежах, чтобы показывать соответствующий признак, описанный в варианте осуществления.
Конкретный вариант осуществления направлен на измерение износа подкладок измельчителя в ротационном цилиндрическом измельчителе, используемом в измельчении минералов в добывающей промышленности.
Замена подкладок измельчителя является дорогостоящей, но необходимой задачей, связанной с работой ротационного цилиндрического измельчителя. Как раскрыто в WO 2007/000010 и приводится здесь со ссылкой на фиг. 1, генератор входного источника может быть выполнен в форме первого сбора множества данных сканирования с использованием лазерного сканера 11 из измельчителя, имеющего цилиндрическую оболочку 25, при этом оболочка имеет загрузочный конец 31 и разгрузочный конец 33. Множество данных сканирования может затем вторично сохраняться в базе данных или другом подходящем цифровом носителе информации. Процессор преобразования, формирующий часть системы обработки данных, затем осуществляет доступ ко множеству данных сканирования, генерируемому генератором входного источника, как должно быть понятно специалисту в данной области техники.
Базовые эталонные данные можно получать с помощью модели CAD измельчителя или с помощью сканирования внутренней оболочки без установленных подкладок, и таким образом указываются в своей собственной координатной системе, X-ось которой определена продольной осью измельчителя. Таким образом, базовые эталонные данные характеризуются ключевыми эталонными данными, содержащими критические параметры измельчителя, которые описывают геометрию базового эталона измельчителя, а именно радиус оболочки и длину цилиндрической части оболочки.
Для измельчителей с коническими, нежели плоскими, концами угол конуса относительно оси цилиндра и расстояние между вершинами загрузочного и разгрузочного концов также составляют ключевые эталонные данные.
Базовые эталонные данные для измельчителя, сохраненные в базе данных, затем сопоставляются с данными смещения, полученными из лазерного сканера, посредством процессора преобразования.
Причина для этого состоит в том, что координатная система данных смещения, полученных посредством лазерного сканера, указывается относительно эталонной точки лазерного сканера, тогда как базовые эталонные данные для измельчителя указываются в своей собственной координатной системе, относящейся к геометрии измельчителя. Поэтому, чтобы выводить точные данные смещения, показывающие толщину сегмента подкладки измельчителя в любой конкретной точке, необходимо сопоставить два набора данных. Соответственно, важным аспектом процессора преобразования является обеспечение этого сопоставления.
Так как лазерный сканер 11 собирает данные в почти сферическом поле обзора, множество исходных данных о точках также содержит ложные точки извне измельчителя, собираемые при прохождении лазерного луча через различные отверстия в загрузочном и разгрузочном концах. Эти нежелательные точки сначала отфильтровываются из накопленного множества данных о точках посредством средства редактирования данных, которое также формирует часть системы обработки данных.
Базовые эталонные данные обычно представляют, по существу, цилиндрическую оболочку с противоположными концами и упомянутыми критическими параметрами, включающими в себя местоположение центральной продольной оси оболочки; радиус оболочки и длину цилиндрической части оболочки.
Работа средства редактирования данных обрисована в виде блок-схемы последовательности операций на Фигурах 2-7. Блок-схема последовательности операций средства редактирования данных этого варианта осуществления начинается с Фигуры 2.
Визуальное изображение множества данных сканирования, вводимых в средство редактирования данных, и результирующий выход из этого средства предоставлены на Фигурах 8 и 8a-8d соответственно.
Средство редактирования данных использует программную утилиту преобразования координат, чтобы осуществлять создание сферической координаты для каждой точки в накопленном множестве данных о точках, при этом упомянутая программная утилита параллельного перемещения координат содержит процесс ротации, чтобы параллельно перемещать каждую точку. Программная утилита преобразования основывает свои вычисления на картезианских координатах для каждой упомянутой точки на этапе 245. Для каждой точки, сферическая координата вычисляется следующим образом:

Так как защитное укрытие 240 заграждает поле обзора сканера, точки множества данных сканирования, могущие быть отнесенными к этой структуре, должны изолироваться и удаляться на этапе 247. Это включает в себя как крышу укрытия, так и поддерживающие балки, используемые, чтобы поддерживать крышу укрытия. Структурный фильтр сканера применяется, чтобы изолировать и удалять эти точки. Один тип структурного фильтра сканера подразумевает использование способа изолирования и удаления точек сканирования защитного укрытия 240 на этапе 247 посредством определения горизонтального и вертикального угловых порогов, которые соответствуют геометрии защитного укрытия 240. С использованием сферических координат множества данных сканирования может затем использоваться следующий способ удаления ошибочных точек, могущих быть отнесенными к защитному укрытию 240 на этапе 247:

Следующие допуски удаляют точки из опор для крыши и применяются на основе угла горизонтального направления на этапе 247.
 (чтобы удалить точки рядом с θ=0°),
(чтобы удалить точки рядом с θ=0°),
 (чтобы удалить точки рядом с θ=180°).
(чтобы удалить точки рядом с θ=180°).
Переменная расстояния, измеренная лазерными сканерами, может быть неточной. Одна детерминанта точности - это интенсивность заданной точки. Чтобы улучшить точность результирующего множества данных сканирования, используется фильтр интенсивности. Один тип фильтра интенсивности - это удалять все точки, которые больше, чем определенное пользователем пороговое значение интенсивности на этапе 249
Средство редактирования данных также использует диапазонный фильтр, чтобы удалять точки, которые не находятся внутри определенного диапазона расстояния. Один тип диапазонного фильтра - это удалять точки внутри множества данных сканирования посредством сравнения измеренного диапазона с максимальным на этапе 251 и минимальным на этапе 253 порогом, выведенным из радиуса измельчителя и длины измельчителя базовых эталонных данных:
Система использует средство ориентирования множества данных о точках, чтобы улучшать точность процессов, описанных ниже. Во-первых, средство временного удаления точек используется в случае, когда было использовано защитное укрытие 240. Один тип средства временного удаления точек - это временно удалять сегмент множества данных сканирования на основе внешних периферийных границ точек, которые были ранее удалены, чтобы обеспечивать возможность для присутствия опор 244 укрытия в 247. В этом варианте осуществления, это достигается посредством временного удаления точек, которые являются, по существу, продольно-параллельными к точкам, которые были ранее удалены, чтобы обеспечивать возможность для присутствия опор 244 укрытия на этапе 247. Соответственно, все точки внутри определенного пользователем поперечного координатного диапазона временно удаляются:
Это учитывает смещения в средстве величин ротации на этапе 259, что иначе вызывается удаленными точками, чтобы обеспечивать возможность для присутствия опор 244 укрытия на этапе 247. Временное удаление точек средством временного удаления точек визуально изображено на Фигуре 12, которая обрисовывает вид сверху иллюстративного множества данных сканирования, когда защитное укрытие 240 было использовано, и точки, могущие быть отнесенными к этому защитному укрытию 248, удаленными на этапе 247. Точки, удаленные в связи с защитным укрытием 240, изображаются в круговой области 248. Область, которая ограничена, по существу, прямоугольной формой 250, представляет точки, которые временно удаляются в этом варианте осуществления.
Лазерный сканер 11 только приблизительно помещается в середину измельчителя, и поэтому продольный 252, поперечный 254 и высотный 268 размер также аппроксимируются. Соответственно, внутренняя координатная система лазерного сканера должна выравниваться с координатной системой измельчителя на этапе 263. Пример этого процесса выравнивания визуально изображен на фиг. 11. Со ссылкой на фиг. 11, множество начальных данных 256 сканирования указывается в координатной системе 258 лазерного сканера, которая произвольным образом размещается и ориентируется относительно координатной системы 260 измельчителя. Процесс ротации множества данных сканирования на этапе 263 используется, чтобы выравнивать координатные системы измельчителя и сканера. После того как процесс ротации множества данных сканирования на этапе 263 завершается, множество данных сканирования, по существу, выравниваются с координатной системой 262 измельчителя.
Для процесса ротации множества данных сканирования требуются величины ротации, чтобы выполнять ротацию. Средство величин ротации используется, чтобы вычислять величины ротации на этапе 263. В этом варианте осуществления, величины ротации включают в себя программную утилиту величин ротации, которая в первую очередь использует процесс параллельного перемещения, чтобы параллельно перемещать множество данных сканирования в центр масс на этапе 255 оставшихся данных
 где
где 
Величины ротации затем определяются посредством процесса вычисления с использованием разложения по собственным значениям ковариационной матрицы множества данных сканирования:
Λ = MCMT
где
Затем осуществляется ротация множества данных сканирования, включая временно удаленные точки на этапе 257, посредством процесса ротации множества данных сканирования на этапе 259, с использованием программной утилиты величин ротации, согласно величинам ротации, выработанным средством величин ротации, в силу чего процесс ротации обеспечивает, что x-продольная, y-поперечная и z-высотная оси совпадают:
После завершения процесса ротации множества данных сканирования на этапе 263, точки, временно удаленные на этапе 257, восстанавливаются во множество данных сканирования на этапе 261 с использованием средства восстановления точек. В этом варианте осуществления, точки, ранее размеченные средством временного удаления точек, восстанавливаются в накопленное множество данных о точках.
Другая итерация удаления нежелательных данных повторяется на этапе 265 согласно тому, превосходит ли продольная координата каждой заданной точки порог, выведенный из длины измельчителя, и, если применимо, угла конуса:
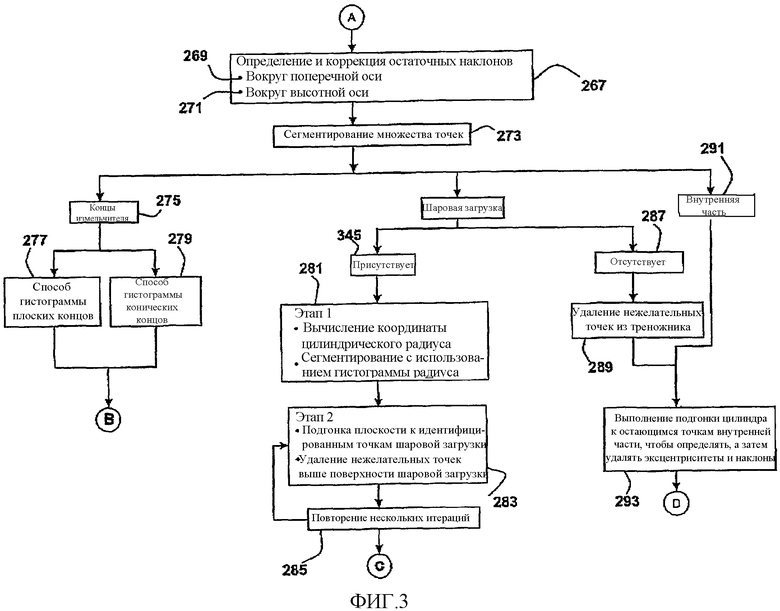
Следуя за второй итерацией удаления нежелательных данных на этапе 265, любые остаточные наклоны определяются и корректируются на этапе 267 с использованием средства коррекции наклона, которое включает в себя программную утилиту коррекции наклона. Программная утилита коррекции наклона на этапе 267 активизируется на множестве данных о точках вокруг поперечной на этапе 269 и высотной на этапе 271 осей.
Со ссылкой на фиг. 13, один тип средства коррекции наклона должен использовать способ определения и корректировки остаточного наклона вокруг поперечной оси на этапе 269 посредством, во-первых, изолирования узкого диапазона точек на вершине измельчителя 266, которые ориентированы параллельно продольной оси 252, с целью обеспечения того, чтобы эти точки находились, по существу, на одном уровне. Этот процесс может активизироваться следующим образом:
i. Процесс извлечения извлекает временный набор точек (p) 266 из внутренней части внутри следующих определяемых пользователем ограничений:

ii. Процесс вычитания вычитает среднюю x координату из извлеченного набора точек:
 ,
,
где 
iii. Для каждой точки в извлеченном наборе точек, формируют следующее 2D линейное уравнение:
iv. Калькулятор наименьших квадратов вычисляет оценку наименьших квадратов наклона, m, как
v. Процесс вычисления угла ротации вычисляет угол ротации, φ. Обеспечивается фигура, визуально изображающая обычную коррекцию наклона вокруг поперечной оси 254 на Фигуре 14. Угол φ ротации вычисляется следующим образом
φ = arctan(m)
vi. Затем в процессе ротации накопленного множества точек сканирования осуществляется ротация накопленного множества данных о точках сканирования:
 где
где 
Во-вторых, изолировать узкий диапазон точек на одной стороне измельчителя 264 на высоте центра масс, с целью обеспечения того, чтобы эти точки были, по существу, параллельными продольной оси 252. Этот процесс может активизироваться следующим образом:
i. Извлекают временный набор точек (p) 264 из внутренней части внутри следующих определяемых пользователем ограничений:

ii. Вычитают среднюю x координату из извлеченного набора точек:
 , где
, где 
iii. Для каждой точки в извлеченном наборе точек, формируют следующее 2D линейное уравнение:
iv. Вычисляют оценку наименьших квадратов наклона, m, как
v. Вычисляют угол ротации, κ. Обеспечивается фигура, визуально изображающая обычную коррекцию наклона вокруг высотной оси 268 на Фигуре 15. Угол κ ротации вычисляется следующим образом
κ = arctan(m)
vi. Затем осуществляют ротацию множества данных сканирования
где 
В текущем варианте осуществления средство разбиения назначает метки множеству данных сканирования на этапе 273 как принадлежащим либо концу измельчителя, либо шаровой загрузке на этапе 270, либо внутренней части на этапе 272.
Средство сегментирования противоположного конца используется, чтобы изолировать и помечать точки во множестве данных сканирования, могущих быть отнесенными к концу измельчителя на этапе 275, что использует программную утилиту сегментирования концов. Средство сегментирования противоположного конца отличается согласно тому, показывают ли базовые эталонные данные, что измельчитель имеет плоский или конический концы.
В случае плоского конца, используется средство сегментирования плоского конца. Средство сегментирования плоского конца на этапе 277 использует программную утилиту сегментирования концов, которая вычисляет частоту каждой продольной 252 координаты внутри накопленного множества данных сканирования с использованием процесса вычисления частоты. Эти данные могут представляться как гистограмма. Пример обычной гистограммы этой природы проиллюстрирован на Фигуре 16. Левый и правый пики представляют наибольшую упомянутую частоту положительной и отрицательной продольных координат 274. Находят расположение этих пиков, которые соответствуют концам измельчителя. Местоположения 274 пикового значения определяют, с добавлением или вычитанием предопределенного порогового значения посредством процесса добавления порога, пороги 276 для назначения точек либо загрузочному концу 282, либо разгрузочному концу 284. В этом варианте осуществления, левый пик определяет загрузочный конец:
и правый конец - разгрузочный конец:
В случае конического конца, средство сегментирования конического конца используется на этапе 279. В этом варианте осуществления, средство сегментирования конического конца использует процесс вычисления частоты программной утилиты сегментирования концов, чтобы вычислять частоту каждой продольной 252 координаты внутри накопленного множества данных сканирования. Эти данные могут также представляться как гистограмма. Пример обычной гистограммы этой природы иллюстрируется на Фигуре 17. Отрицательный и положительный пики упомянутых частот продольных координат вычисляются 280 посредством процесса вычисления наибольшей частоты.
Из этих отрицательного и положительного пиков 280, осуществляется внутренний поиск гистограммы посредством процесса вычисления местоположений минимумов, в направлении к местоположению сканера 11 для местоположений 278 минимумов, которые соответствуют тому, где конические концы пересекают внутреннюю часть.
Местоположения 278 минимумов, с добавлением или вычитанием порогового значения посредством процесса добавления порога, используются в процессе сегментирования, чтобы определять пороги 290 для назначения точек плоским концам. В этом варианте осуществления, левое минимальное местоположение определяет загрузочный конец:
и правое минимальное местоположение - разгрузочный конец:
С множеством данных сканирования, соответствующих концам измельчителя, сегментированным средством сегментирования противоположного конца на этапе 275, точки, представляющие шаровую загрузку 270, могут сегментироваться из данных о точках сканирования с использованием средства сегментирования плавающих объектов, которое включает в себя программную утилиту плавающих объектов, чтобы сегментировать точки в накопленном множестве данных о точках, могущих быть отнесенными к объектам, которые нефиксированно соединены с измельчителем. Если шаровая загрузка присутствует на этапе 345, средство редактирования данных выполнено с возможностью идентифицировать и сегментировать эту часть множества данных сканирования.
Чтобы идентифицировать точки шаровой загрузки 270, калькулятор частоты радиуса вычисляет частоту каждого значения цилиндрического радиуса, вычисляемого на этапе 281, где
Эта частота каждого цилиндрического радиуса может визуально изображаться посредством гистограммы. Пример обычной гистограммы этой природы проиллюстрирован на Фигуре 18. Наибольшая частота цилиндрических радиусов 284 представляет точки подкладки 272 внутренней части, как определяется процессом пиковых значений. Радиус в этом пиковом местоположении 284, с вычитанием определяемого пользователем допуска, используется как порог 286 для назначения точек шаровой загрузке:
В нашем примере гистограмма из Фигуры 18, второй выступ справа 288 содержит точки шаровой загрузки; меньшие выступы на левой стороне этого второго выступа 288 содержат точки из треножника, защитного укрытия 240 или его поддерживающей балки 246.
Со ссылкой на Фигуру 19, второй этап в сегментировании точек шаровой загрузки на этапе 283 включает в себя:
i. Использование процесса подгонки сегментирования, чтобы подгонять все точки шаровой загрузки 270 к плоскости посредством базирующегося на собственных значениях разложения. Разложение по собственным значениям является таким, как описано ранее:
процесс параллельного перемещения множества точек сканирования, чтобы параллельно перемещать все множество точек из m точек в центр масс:
 где
где 
процесс разложения по собственным значениям, чтобы определять разложение по собственным значениям ковариационной матрицы множества точек шаровой загрузки:
Λ = MCMT,
где
ii. Модель плоскости задается посредством ax+by+cz-d=0, где (a, b, c) - это элементы собственного вектора, соответствующего наименьшему собственному значению, и 
iii. Используют процесс вычисления остаточного отклонения, чтобы вычислять остаточное отклонение, v, от плоскости наилучшей подгонки для каждой точки 
iv. Используют процесс отбрасывания точек, чтобы отбрасывать точки выше плоскости 294, может затем отбрасываться. Отбрасываемыми точками являются теми остатками, которые в два раза больше стандартного отклонения остатков и выше плоскости 292, т.е. только внутренние резко отклоняющиеся значения:
где σ - это квадратный корень наименьшего собственного значения (отметим: знак vi является отрицательным для точек выше поверхности шаровой загрузки и положительным для точек ниже).
Этот второй этап 283 может затем повторяться для одной или более итераций на этапе 285, чтобы дополнительно уточнять набор данных шаровой загрузки. В этом варианте осуществления, процесс повторяется пять раз.
Процесс визуально изображен на Фигуре 19. В этом примере множество данных сегмента шаровой загрузки, фигура изображает:
i. точки из ножек треножника и нежелательные точки 296 данных;
ii. порог для удаления нежелательных внутренних точек 292 данных; и
iii. плоскость наилучшей подгонки к данным 294 шаровой загрузки.
Возвращаясь к блок-схеме последовательности операций средства редактирования данных на Фигуре 3, если шаровая загрузка не присутствует во множестве данных сканирования на этапе 287, точки 'треножника', если он использовался лазерным сканером 11, удаляются на этапе 289. В этом варианте осуществления, это достигается посредством удаления определенного конуса точек из под лазерного сканера 11, из множества данных сканирования:
После сегментирования концов измельчителя и точек шаровой загрузки из множества данных сканирования, оставшиеся данные - это точки, соответствующие внутренней части на этапе 291. Средство сегментирования внутренней части использует эти точки как основу своих вычислений, посредством использования программной утилиты сегментирования внутренней части.
В этом варианте осуществления, первый этап средства сегментирования внутренней части представляет собой удаление любого эксцентриситета в положении измельчителя и наклонов посредством использования процесса подгонки цилиндра. В этом варианте осуществления, процесс подгонки цилиндра подгоняет цилиндр ко всем точкам внутренней части на этапе 293, как показано на Фигуре 20. Данные затем преобразуются соответственно.
Процесс подгонки цилиндра проиллюстрирован на Фигуре 20 и включает в себя изображение оси 298 цилиндра наилучшей подгонки и радиус (r) 300 цилиндра наилучшей подгонки. Процесс подгонки цилиндра на этапе 293 включает в себя программную утилиту подгонки цилиндра с использованием следующего способа:
i. для каждой точки внутренней части, следующее уравнение формируется с использованием процесса формирования уравнения
где вектор точек наблюдения задается посредством 
вектор положения цилиндра задается посредством 
и вектор оси цилиндра задается посредством 
ii. процесс добавления взвешенного ограничения, чтобы добавлять взвешенное ограничение a2 + b2 + c2 -1 = 0 и решать в параметрических наименьших квадратах
iii. процесс параллельного перемещения положения цилиндра, чтобы параллельно перемещать все множество точек посредством вектора положения цилиндра 
iv. процесс вычисления величин ротации, чтобы вычислять углы ротации, φ и κ:
 и
и 
и процесс преобразования множества точек сканирования, чтобы преобразовывать все множество точек
где 
Следующий выполняемый этап - это грубое сегментирование внутренней части на этапе 295, в силу чего точки с цилиндрическим радиусом, меньшим чем допуск, удаляются.
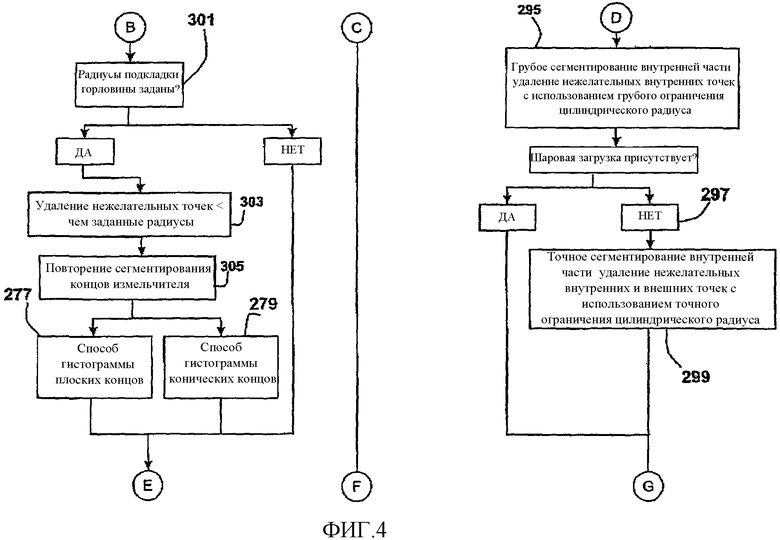
Возвращаясь к блок-схеме последовательности операций на Фигуре 4, если базовые эталонные данные включают в себя радиусы подкладки горловины на этапе 301, точки множества данных сканирования, сегментированные и размеченные как конец измельчителя с цилиндрическим радиусом, меньшим чем определенные радиусы подкладки горловины, удаляются на этапе 303:
Процесс сегментирования концов измельчителя из множества данных сканирования в концы измельчителя, основываясь либо на способе плоских концов на этапе 277, либо способе конических концов на этапе 279, повторяется на этапе 305. Вторая итерация является более точной вследствие преобразования множества данных сканирования в происходящем периоде, непосредственно после первой итерации сегментирования на этапе 275.
Возвращаясь к блок-схеме последовательности операций на Фигуре 4, если в измельчителе отсутствует шаровая загрузка на этапе 297, то точное сегментирование внутренней части может выполняться с использованием базирующегося на радиусе фильтра на этапе 299. Способ выполнения точного сегментирования в этом варианте осуществления включает в себя удаление любых оставшихся ложных точек, которые лежат либо внутри радиуса, представляющего минимальный радиус для подкладки, либо точек, которые лежат вне измельчителя
 или
или 
Это проиллюстрировано на Фигуре 21, в силу чего дуговые линии представляют порог радиуса задней стороны подкладки, чтобы удалять ошибочные и/или нежелательные данные вне измельчителя 302, и радиусный порог, чтобы удалять ошибочные и/или нежелательные данные внутри измельчителя 304.
Первый этап сегментирования точек внутренней части представляет собой удаление любого эксцентриситета в положении измельчителя и наклонов посредством подгонки цилиндра ко всем точкам внутренней части на этапе 293 и преобразования данных соответственно затем повторяется на этапе 307.
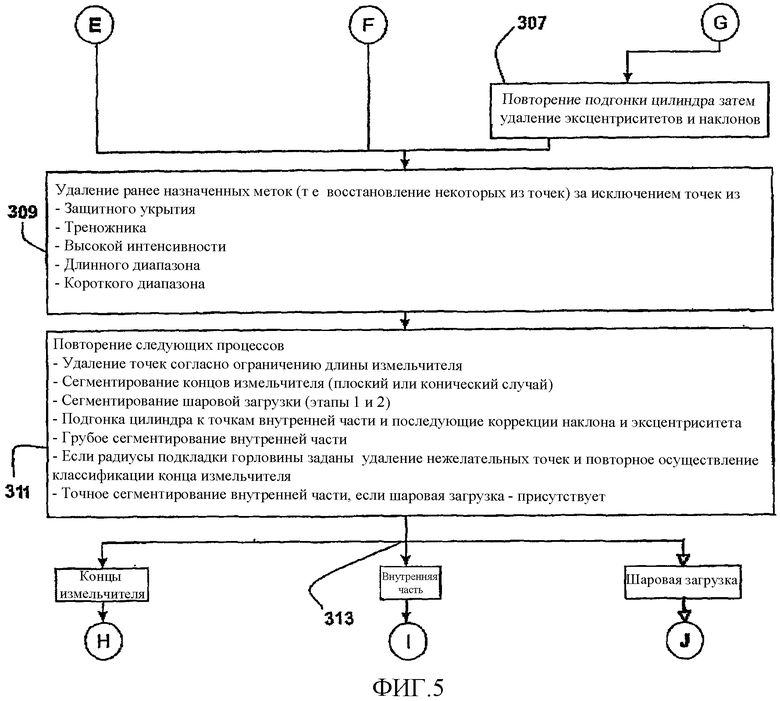
С множеством более точно ориентированных данных сканирования, точки, которые были ранее сегментированы, удалены или назначены меткой, восстанавливаются в единичный набор 309 множества данных сканирования, за исключением тех точек, которые ранее удалены в связи с:
i. защитным укрытием 240 на этапе 247;
ii. точками из ножек 296 треножника на этапе 289;
iii. пороговым значением интенсивности на этапе 249;
iv. определенным диапазоном расстояния, измеренный диапазон с максимальным на этапе 251 и минимальным на этапе 253 порогом, выведенным из радиуса измельчителя и длины измельчителя базовых эталонных данных.
Следующие ранее описанные этапы затем повторяются на этапе 311:
i. удаляют точки внутри множества данных сканирования посредством сравнения измеренного диапазона с максимальным на этапе 251 и минимальным на этапе 253 порогом, выведенным из радиуса измельчителя и длины измельчителя базовых эталонных данных;
ii. процесс пометки точек во множестве данных сканирования, могущих быть отнесенными к концу измельчителя на этапе 275;
iii. если шаровая загрузка присутствует, идентифицируют и сегментируют эту часть множества данных сканирования на этапе 345;
iv. удаляют любой эксцентриситет в положении измельчителя и наклоны посредством подгонки цилиндра ко всем точкам внутренней части и преобразования данных соответственно на этапе 293;
v. грубое сегментирование внутренней части на этапе 295, в силу чего точки с цилиндрическим радиусом, меньшим чем допуск, удаляются;
vi. если базовые эталонные данные включают в себя радиусы подкладки горловины на этапе 301:
a. точки множества данных сканирования, сегментированных и размеченных как конец измельчителя с цилиндрическим радиусом, меньшим чем определенный порог 308 радиуса подкладки горловины, удаляются на этапе 303; и
b. процесс сегментирования концов измельчителя из множества данных сканирования в концы измельчителя, на основе либо способа плоских концов на этапе 277, либо способа конических концов на этапе 279.
vii. если никакая шаровая загрузка не присутствует, выполняют точное сегментирование концов внутренней части с использованием базирующегося на радиусе фильтра на этапе 290.
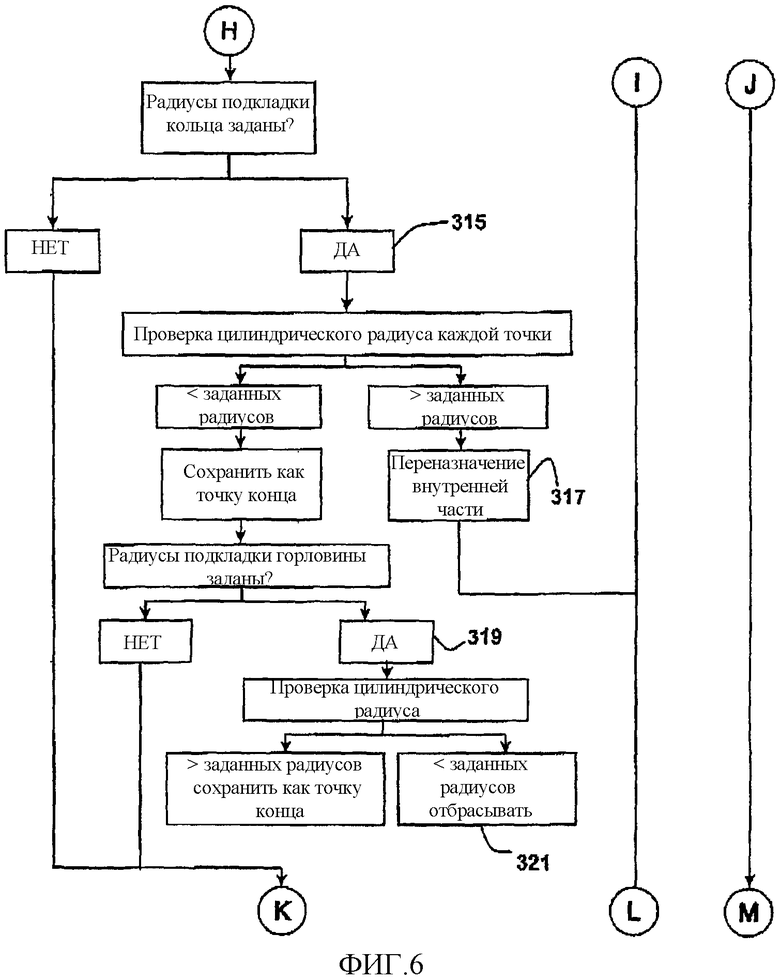
При завершении этих итераций, множества данных сканирования, поэтому, сегментируются в данные, могущие быть отнесенными к концам измельчителя, внутренней части и шаровой загрузке (если шаровая загрузка присутствует) на этапе 313. Возвращаясь к Фигуре 6, и со ссылкой на Фигуру 45, если базовые эталонные данные включают в себя радиусы подкладки кольца на этапе 315, точки в сегментировании конца измельчителя, которые больше, чем порог 306 радиуса подкладки кольца, переназначаются сегментированию точек внутренней части на этапе 317
Если базовые эталонные данные включают в себя радиусы подкладки горловины на этапе 319, точки, в сегментировании конца измельчителя, которые меньше, чем порог 308 радиуса подкладки горловины, удаляются из множества данных сканирования на этапе 321
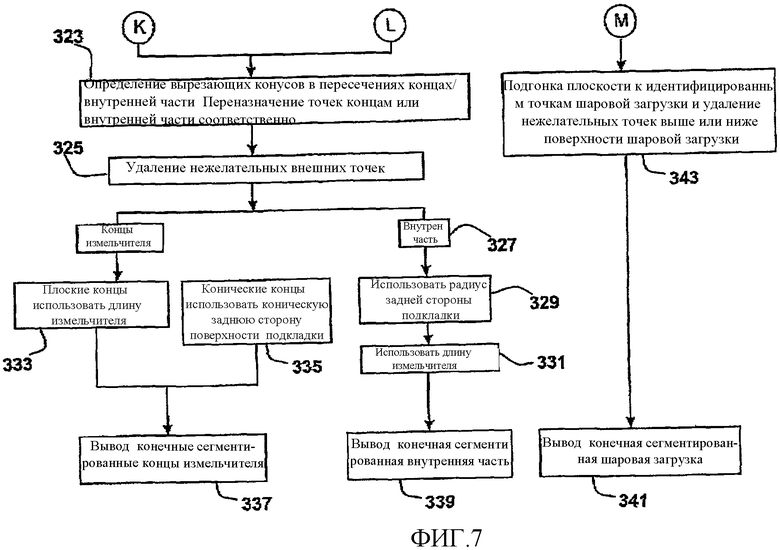
Со ссылкой на Фигуру 7, средство сегментирования внутренней части также включает в себя способ использования конической формы, чтобы дополнительно уточнять сегментирование точек между концами измельчителя и внутренней частью, обеспечивается на этапе 323. В этом варианте осуществления, этот способ дополнительного уточнения достигается посредством следующих этапов:
i. процесс уточнения центра масс, чтобы уточнять центр масс множества точек в продольном измерении посредством вычисления среднего значения в любом конце множества точек внутренней части с использованием равного количества точек (чтобы избегать смещения)
 так что
так что 
и
 так что
так что 
где - и + указывают на точки из левого и правого концов множества точек подкладки внутренней части, соответственно;
ii. процесс параллельного перемещения множества точек сканирования, чтобы параллельно перемещать все множество точек посредством этих двух средств
где 
iii. процесс определения круга, чтобы обозначать границы круга, который является кругом пересечения задней стороны линейной (BOL) цилиндрической поверхности внутренней части и поверхности BOL конического или плоского конца;
iv. процесс определения конуса, чтобы обозначать границы конуса с этим кругом как основу и вершину на стороне внутренней части круга, имеющего половину угла при вершине 45°. Визуальное изображение конуса этого типа обеспечивается на Фигуре 24;
v. процесс назначения точек, чтобы назначать точки внутри конуса заданному концу измельчителя; точки вне назначаются внутренней части.
После дополнительного уточнения сегментирования точек внутренней части и конца измельчителя множества данных сканирования, конечное удаление нежелательных внешних точек может выполняться на этапе 325.
Для сегментированных точек внутренней части на этапе 327, точки, чей цилиндрический радиус превосходит определенный BOL радиус, удаляются на этапе 329:
Точки, чье абсолютное значение продольной координаты превосходит половину определенной длины измельчителя, также удаляются на этапе 331:
 .
.
В случае измельчителя плоского конца, точки, чье абсолютное значение продольной координаты превосходит половину определенной длины измельчителя, удаляются на этапе 333:
В случае измельчителя с коническим концом, конструируют точку вершины, расположенную на половине известной длины измельчителя от центра измельчителя. От точки вершины, конструируют конус поверхности BOL с заданным углом по расчетным данным. Этот способ визуально изображен на Фигуре 25. Точки, принадлежащие концу измельчителя, но попадающие за пределы этого конуса, удаляются на этапе 335.
Если шаровая загрузка 282 присутствует, конечное уточнение выполняется на этапе 343. Со ссылкой на Фигуру 22, следующий процесс повторяется несколько раз:
i. Все точки шаровой загрузки подгоняются к плоскости 310 посредством базирующегося на собственных значениях разложения, как ранее описано на этапе 283;
ii. Резко отклоняющееся значение допуска, в 3 раза превышающее стандартное отклонение остатков, используется, чтобы удалять точки выше и ниже плоскости 312 наилучшей подгонки
Эти этапы 343 могут затем повторяться для одной или более итераций, чтобы дополнительно уточнять набор данных шаровой загрузки. В настоящем варианте осуществления процесс повторяется однократно.
Конечный выход из средства редактирования данных - это наборы точек, могущих быть отнесенными к концам измельчителя на этапе 337 (проиллюстрировано на Фигурах 8b и 8c), внутренней части на этапе 339 (проиллюстрировано на Фигуре 8a) и шаровой загрузки на этапе 341, если присутствует (проиллюстрировано на Фигуре 8d).
В случае измельчителя, использующего вторичную систему размельчения, объем тех объектов, которые нефиксированно соединены с поверхностью, может предпочтительно измеряться посредством обеспечения средства измерения нефиксированно соединенного объема. Два типа нефиксированно соединенных объектов, которые могут присутствовать в измельчителе, - это набор шаров и кусков руды, которые совместно составляют то, что указывается здесь как шаровая загрузка.
В таком случае, система обработки данных включает в себя средство измерения объема шаровой загрузки. Средство измерения объема шаровой загрузки работает на том принципе, что набор точек, представляющих поверхность шаровой загрузки, ранее полученной средством сегментирования данных, моделируется посредством многочлена подгонки наименьших квадратов или другой подходящей модели, представленной посредством функции f(X, Y, Z). Объем шаровой загрузки, VBC, затем измеряется посредством вычисления объемной разницы между поверхностью (f(XYZ)) и цилиндром наилучшей подгонки, c, между концами измельчителя, т.е.

Обрабатывающее программное обеспечение 19 также включает в себя средство различения шаров от руды, чтобы определять отношение шаров к руде. Согласно средству различения шаров от руды, каждая точка в наборе точек, представляющих поверхность шаровой загрузки, классифицируется как принадлежащая либо к шару, либо к куску руды посредством анализа кривизны. Для каждой точки в этом наборе определяется местоположение поднабора предопределенного количества точек, k, которые располагаются в ее непосредственной близлежащей области. Локальные меры кривизны, включая главные кривизны и изменение кривизны, вычисляются из этого поднабора. Точка помечается как принадлежащая шару, если ее главные кривизны равны внутри предопределенного допуска; иначе она принадлежит куску руды. Постоянное изменение кривизны внутри близлежащей области используется как дополнительный критерий для пометки.
Дополнительный анализ проводится посредством средства анализа шаров в каждой точке внутри ее близлежащей области из k точек так, чтобы группировать вместе смежные точки, принадлежащие к одной и той же метке (т.е. шар или руда). Изменение кривизны используется в этом анализе, чтобы идентифицировать границы между смежными шарами. Результат - это количество поднаборов данных, содержащих точки на индивидуальных шарах, и количество поднаборов данных, содержащих точки на кусках руды.
Эти результаты данных поднаборов используются, чтобы оценивать композицию вещества ниже сканирования поверхности, посредством факторизации расстояния между подкладкой и поверхностью шаровой загрузки, и геометрии измельчителя.
В альтернативном варианте осуществления более точная оценка достигается посредством использования множества данных верхней поверхности как основы анализа вероятной композиции оставшейся части шаровой загрузки ниже.
Система обработки данных также включает в себя средство измерений размера шаров, чтобы вычислять размер шаров в измельчителе. Для каждого из поднаборов шаровых точек размер шара может измеряться следующим образом. Наименьшие квадраты используются, чтобы подгонять данные поднабора к сфере, чья аналитическая модель задана посредством

где (Xi, Yi, Zi) - это координаты точки i, принадлежащей поднабору, (Xc, Yc, Zc) - это координаты центра сферы и R - это радиус сферы. R и (Xc, Yc, Zc) составляют параметры, которые должны быть оценены из данных поднабора.
Многие измельчители монтируются с ячейками загрузки или другими устройствами, которые измеряют полную массу, MT, измельчителя и его содержимого. Эта масса содержит массу подкладок, ML, массу шаровой загрузки, MBC, и массу других элементов измельчителя (подшипников, оболочки, болтов, и т.д.), ME:
Масса других элементов измельчителя, ME, является одним из известных расчетных параметров. Масса подкладок измельчителя вычисляется из плотности подкладки измельчителя, ρL, которая является одним из известных расчетных параметров, и объема подкладки измельчителя, VL:
Объем подкладки измельчителя вычисляется посредством интегрирования уже полученных измерений толщины подкладки по видимой поверхности измельчителя, которые могут быть неполными, в этом случае это умножается на соответствующий коэффициент, чтобы получить объем для полного измельчителя. Таким образом, масса шаровой загрузки может быть вычислена как

Масса шаровой загрузки дополнительно разлагается на массу руды, More, и массу шаров, Mballs,
 .
.
Плотности руды, ρore, и шаров, ρballs, являются известными расчетными параметрами, таким образом, масса шаровой загрузки может быть выражена как

Дополнительно, объем шаровой загрузки известен из средства измерения шаровой загрузки:
Таким образом, объемы руды и шаров могут определяться из этих двух уравнений и использоваться, чтобы вычислять отношение шара к руде.
Подкладка на разгрузочном конце содержит отверстия, чтобы обеспечивать возможность прохождения раздробленной руды. В некоторых измельчителях эти отверстия намного меньше, чем диаметр шаров, тогда как в других они намного больше (т.е. соизмеримы в размере с шарами) и их измерение является важным.
В этом случае, система обработки данных включает в себя средство измерения отверстий, чтобы измерять размер отверстий в поверхности измельчителя. Отверстия на разгрузочном конце могут располагаться в некотором количестве секторов, выходящих наружу из центра 341, как показано на Фигуре 26a.
Так как шаблон отверстий решетки повторяется вокруг разгрузочного конца, начальная обработка данных ограничивается до области, равной по угловой ширине одному сектору, как изображено на Фигуре 26b.
Края данных обнаруживаются внутри этого сектора с использованием анализа локальной кривизны, анализа собственных значений, анализа интенсивности или комбинации перечисленного. Все краевые точки, соответствующие одному конкретному отверстию решетки, собираются вместе как поднабор множества данных о точках. Фигура 27a показывает множество данных о сегментированных точках разгрузочного конца, и Фигура 27b показывает множество данных о тех же точках с обнаруженными краями для одного отверстия 343 решетки. Из этого поднабора вычисляются минимальная и максимальная ширины. Это повторяется для всех отверстий решетки в секторе. Процедура затем повторяется для всех отверстий в следующем секторе решетки.
Следует принять во внимание, что объем настоящего изобретения не ограничен конкретным вариантом осуществления, здесь описанным. Важно, что это изобретение не ограничено преобразованием и измерением толщины подкладок измельчителя в любом из доступных типов измельчителя. В самом деле, другие варианты осуществления могут предусматриваться с использованием таких же принципов, примененных к преобразованию и/или измерению смещения поверхности относительно эталона в других приложениях, таких как сосуды и структуры, особенно общие для промышленных установок.



Заявленное устройство относится к системам и способам сканирования для ориентирования множества данных сканирования относительно базовых эталонных данных. Заявленная система для ориентирования множества данных сканирования целевой поверхности относительно базовых эталонных данных содержит генератор входного источника, выполненный с возможностью обеспечивать упомянутое множество данных сканирования; средство коррекции наклона для ориентирования упомянутого множества данных о точках относительно базовых эталонных данных; и средство редактирования данных, чтобы фильтровать ложные данные о точках из накопленного множества данных о точках. При этом упомянутые базовые эталонные данные представляют, по меньшей мере, критические геометрические параметры базового эталона, при этом базовый эталон является, по существу, отличным от целевой поверхности. Технический результат - повышение точности. 2 н. и 22 з.п. ф-лы, 27 ил.
1. Система для ориентирования множества данных сканирования целевой поверхности относительно базовых эталонных данных, содержащая:
генератор входного источника, выполненный с возможностью обеспечивать упомянутое множество данных сканирования;
средство коррекции наклона для ориентирования упомянутого множества данных о точках относительно базовых эталонных данных; и
средство редактирования данных, чтобы фильтровать ложные данные о точках из накопленного множества данных о точках;
при этом упомянутые базовые эталонные данные представляют, по меньшей мере, критические геометрические параметры базового эталона, при этом базовый эталон является, по существу, отличным от целевой поверхности.
2. Система по п.1, в которой упомянутые базовые эталонные данные содержат ключевые эталонные данные, для того, чтобы описывать геометрию базового эталона.
3. Система по п.1, в которой целевая поверхность и базовый эталон указываются в их собственной соответствующей координатной системе.
4. Система по п.1, в которой базовый эталон представляет заключенное пространство.
5. Система по п.4, в которой заключенное пространство ограничено, по существу, цилиндрической оболочкой с противоположными концами.
6. Система по п.5, в которой базовый эталон дополнительно содержит критические параметры, обозначающие местоположение центральной продольной оси оболочки, радиус оболочки; и длину цилиндрической части оболочки.
7. Система по п.1, в которой упомянутое средство редактирования данных дополнительно включает в себя средство разбиения, чтобы разбивать упомянутое множество данных о точках на дискретные сегменты, соответствующие разным геометрически описанным секциям упомянутой поверхности.
8. Система по п.1, в которой упомянутое средство редактирования данных выполнено с возможностью работать до средства коррекции наклона.
9. Система по п.7, в которой упомянутое средство редактирования данных включает в себя, по меньшей мере, один или более из следующих процессов:
(i) структурный фильтр сканера, чтобы удалять точки, могущие быть отнесенными к любому поддерживающему средству, используемому, чтобы располагать, стабилизировать или защищать средство сканирования;
(ii) фильтр интенсивности, чтобы удалять любую точку в накопленном множестве данных о точках выше порогового значения интенсивности; и
(iii) диапазонный фильтр, чтобы удалять любую точку, меньшую, чем минимальный или большую, чем максимальный порог в накопленном множестве данных о точках.
10. Система по п.9, в которой упомянутые базовые эталонные данные включают в себя переменные радиуса и длины, и при этом упомянутый диапазонный фильтр выводит порог из упомянутого радиуса и упомянутой длины.
11. Система по п.1, в которой средство коррекции наклона включает в себя средство ориентирования множества данных о точках, при этом упомянутое средство ориентирования множества данных о точках содержит:
средство временного удаления точек для временного удаления точек, которые являются, по существу, продольно параллельными точкам, удаленным структурным фильтром сканера;
средство величин ротации, чтобы вычислять величины ротации, применяемые к множеству данных сканирования;
процесс ротации множества данных сканирования; и
средство восстановления точек, в силу чего точки, удаленные средством временного удаления точек, восстанавливаются в накопленное множество данных о точках.
12. Система по п.11, в которой упомянутое средство ориентирования множества данных о точках включает в себя программную утилиту величин ротации, содержащую:
процесс параллельного перемещения, чтобы параллельно перемещать множество данных сканирования с помощью сокращения центра масс
 где
где  ; и
; и
процесс вычисления, чтобы определять величины ротации посредством разложения по собственным значениям ковариационной матрицы множества данных сканирования
Λ=МСМT,
где 
13. Система по п.12, в которой программная утилита величин ротации выполнена с возможностью ротации накопленного множества данных сканирования, при этом упомянутая программная утилита величин ротации содержит:
процесс ротации для ротации значений таким образом, чтобы х-продольная, у-поперечная и z-высотная оси совпадали 
где М - это величина ротации, вычисленная упомянутым средством величин ротации.
14. Система по п.1, в которой средство коррекции наклона включает в себя программную утилиту коррекции наклона для определения и корректировки любого остаточного наклона в накопленном множестве данных сканирования вокруг оси, содержащая:
процесс извлечения, чтобы извлекать временный набор точек (р) внутри набора ограничений:
процесс вычитания, чтобы вычитать среднюю х координату из временного набора точек:
 где
где 
формирование следующего 2D линейного уравнения для каждой точки в результирующем временном наборе точек:
вычисление наименьших квадратов, чтобы вычислять оценку наименьших квадратов наклона, m, как:
процесс вычисления угла ротации, чтобы вычислять угол φ ротации как:
φ=arctan(m),
процесс ротации накопленных точек сканирования для ротации, накопленных данных о точках сканирования:
 где
где 
15. Система по п.7, в которой упомянутое средство разбиения включает в себя, по меньшей мере, один или более из следующих процессов.
(i) средство сегментирования противоположного конца, при этом упомянутое средство сегментирования противоположного конца включает в себя, по меньшей мере, один или более из следующих процессов:
a) средство сегментирования плоского конца, чтобы сегментировать точки в накопленное множество данных о точках, когда упомянутые базовые эталонные данные обозначают, по существу, плоский конец; и
b) средство сегментирования конического конца, чтобы сегментировать точки в накопленное множество данных о точках, когда упомянутые базовые эталонные данные обозначают, по существу, конический конец,
(ii) средство сегментирования плавающих объектов, чтобы сегментировать точки в накопленное множество данных о точках, могущих быть отнесенными к объектам, которые являются нефиксированно соединенными с упомянутой поверхностью; и
(iii) средство сегментирования внутренней части, чтобы сегментировать точки в накопленное множество данных о точках, могущих быть отнесенными к упомянутой цилиндрической оболочке.
16. Система по п.15, в которой упомянутое средство сегментирования плоского конца и средство сегментирования конического конца включает в себя программную утилиту сегментирования концов, содержащая:
процесс вычисления частоты, чтобы вычислять частоту каждой продольной координаты внутри накопленного множества данных о точках;
процесс вычисления наибольшей частоты, чтобы определять наибольшую упомянутую частоту положительной и отрицательной продольных координат;
процесс добавления порога, чтобы добавлять пороговое значение к упомянутым наибольшим отрицательному и положительному частотным значениям; и
в силу чего упомянутое средство сегментирования конического конца дополнительно содержит:
процесс вычисления местоположений минимумов, чтобы сканировать упомянутые продольные координатные частоты, чтобы определять местоположения минимумов из упомянутых наибольших отрицательного и положительного частотных значений в направлении местоположения упомянутого сканера;
процесс сегментирования, чтобы сегментировать точки в накопленное множество данных о точках, могущих быть отнесенными к плоским концам, согласно упомянутым местоположениям минимумов; и
в силу чего упомянутое средство сегментирования конического конца использует наибольшие отрицательное и положительное частотные значения процесса вычисления местоположений минимумов, чтобы сегментировать точки в накопленное множество данных о точках, могущих быть отнесенными к коническим концам.
17. Система по п.1, дополнительно включающая в себя средство измерения нефиксированно соединенного объема, чтобы измерять объем объектов, которые являются нефиксированно соединенными с упомянутой поверхностью.
18. Система по п.1, дополнительно включающая в себя средство измерения отверстий, чтобы измерять размер отверстий в упомянутой поверхности.
19. Система по п.17, в которой упомянутое средство измерения нефиксированно соединенного объема дополнительно содержит средство различения шаров от руды, чтобы измерять отношение набора шаров к нешаровым материалам.
20. Система по п.17, в которой упомянутое средство измерения нефиксированно соединенного объема дополнительно содержит средство измерения размера шаров, чтобы измерять размер набора шаров внутри цилиндрической оболочки.
21. Система по п.15, в которой упомянутое средство сегментирования плавающих объектов включает в себя программную утилиту плавающих объектов, которая работает после того, как упомянутое средство сегментирования противоположного конца повлияло на упомянутое множество данных сканирования, при этом упомянутая программная утилита плавающих объектов содержит:
процесс вычисления частоты радиуса, чтобы вычислять частоту каждого значения цилиндрического радиуса в накопленном множестве данных сканирования;
процесс определения пиковых значений, чтобы определять пиковое значение частот цилиндрических радиусов и точек сегментирования на основе упомянутого пикового значения;
процесс подгонки сегментирования, чтобы подгонять все сегментированные точки к плоскости посредством базирующегося на собственных значениях разложения;
процесс параллельного перемещения множества данных сканирования, чтобы параллельно перемещать множество данных сканирования из m точек в центр масс
 где
где 
процесс разложения по собственным значениям, чтобы определять разложение по собственным значениям ковариационной матрицы
Λ=МСМT,
где 
модель плоскости задается посредством ax+by+cz-d=0 где (а, b, с) - это элементы собственного вектора, соответствующего наименьшему собственному значению, и 
процесс вычисления остаточного отклонения, чтобы вычислять остаточное отклонение, v, от плоскости наилучшей подгонки для каждой точки
процесс отбрасывания точек, чтобы отбрасывать точки выше плоскости на основе стандартного отклонения остатков.
22. Система по п.15, в которой упомянутое средство сегментирования внутренней части включает в себя программную утилиту сегментирования внутренней части, содержащую:
процесс уточнения центра масс, чтобы уточнять центр масс множества точек на продольной оси посредством вычисления среднего значения на любом конце упомянутой, по существу, цилиндрической оболочки с использованием равного количества точек
 так что
так что 
и
 так что
так что 
где - и + указывают на точки из левого и правого концов множества точек подкладки внутренней части соответственно;
процесс параллельного перемещения множества данных сканирования, чтобы параллельно перемещать все множество данных сканирования посредством этих двух средств
 где
где  ;
;
процесс обозначения границ круга чтобы обозначать границы круга на каждом конце упомянутой, по существу, цилиндрической оболочки, при этом упомянутый круг является кругом пересечения поверхности цилиндрической внутренней части упомянутых базовых эталонных данных и поверхности конического или плоского конца базовых эталонных данных;
процесс обозначения границ конуса, чтобы обозначать границы конуса с этим кругом как основу и вершину на стороне внутренней части круга, имеющего половину угла при вершине 45°;
процесс назначения точек, чтобы назначать каждую точку внутри конуса заданному концу упомянутой, по существу, цилиндрической оболочки и чтобы назначать каждую точку вне конуса упомянутой цилиндрической оболочке.
23. Система по п.15, в которой упомянутое средство сегментирования внутренней части содержит процесс подгонки цилиндра, при этом упомянутый процесс подгонки цилиндра включает в себя программную утилиту подгонки цилиндра, которая работает после того, как упомянутое средство сегментирования противоположного конца и упомянутое средство сегментирования плавающих объектов повлияли на упомянутое множество данных сканирования, при этом упомянутая программная утилита подгонки цилиндра содержит:
процесс формирования уравнения, чтобы формировать следующее уравнение для каждой точки в накопленном множестве данных сканирования , где вектор точек наблюдения задан посредством  , вектор положения цилиндра задан посредством
, вектор положения цилиндра задан посредством  и вектор оси цилиндра задан посредством
и вектор оси цилиндра задан посредством
процесс добавления взвешенного ограничения, чтобы добавлять взвешенное ограничение a2+b2+c2-1=0 и решение в параметрических наименьших квадратах,
процесс параллельного перемещения положения цилиндра, чтобы параллельно перемещать все множество точек сканирования посредством вектора положения цилиндра 
процесс вычисления величин ротации, чтобы вычислять углы ротации, φ и к
 и
и  ; и
; и
процесс преобразования множества точек сканирования, чтобы преобразовывать все множество точек
 , где M=R3(к)R2(φ).
, где M=R3(к)R2(φ).
24. Способ ориентирования множества данных сканирования поверхности относительно базовых эталонных данных в соответствии с системой по любому из пп.1-23.
| US 2004001620 A1, 01.01.2004 | |||
| EP 1662228 A1, 31.05.2006 | |||
| СПОСОБ ПОЛУЧЕНИЯ ИЗОБРАЖЕНИЯ РАЗВЕРТКИ ПОВЕРХНОСТИ ДЕФОРМИРОВАННЫХ ЦИЛИНДРИЧЕСКИХ ОБЪЕКТОВ | 1999 |
|
RU2155378C1 |
| US 2002085757 A1, 04.07.2002 | |||
| DE 4237056 A1, 05.05.1994. | |||

