Изобретение относится к сфере управления дорожным движением на регулируемых перекрестках с оценкой уровня дорожной безопасности перекрестка по его конфликтной загрузке в зависимости от интенсивности транспортно-пешеходных потоков. В частности, изобретение может быть использовано там, где, по меньшей мере, по одной из улиц перекрестка с пересечением или с примыканием в каждом направлении имеется не менее чем трехполосное движение и выше, а по другой двухполосное движение и выше.
Из уровня техники известна система управления движением транспортно-пешеходными потоками на перекрестках при двухфазных и многофазных циклах разъезда транспортных средств (рис.3.3÷3.8, стр.43÷50. Кременец Ю.А., Печерский М.П., Афанасьев М.Б. Технические средства организации дорожного движения: Учебник для вузов. - М.: ИКЦ «Академкнига», 2005. - 279 с.).
Наиболее распространенная в практике двухфазная система управления движением разделяет во времени конфликтные пересечения в транспортно-пешеходных потоках (ТПП) («транспорт - транспорт» и «транспорт-пешеход») на две группы при допустимом уровне безопасности движения по «конфликтной загрузке». При такой системе управления в схемах организации движения повороты транспортных потоков (ТП) налево, направо и далее через пешеходные потоки (ПП) разрешены при наличии конфликтов в соответствии с порядком, предусмотренным Правилами дорожного движения Российской Федерации. Правовое разрешение указанных конфликтов нормируется в допустимых границах когда: интенсивность левоповоротного ТП через встречный ТП не превышает 120 авт./ч; интенсивность ПП на одном переходе не превышает 900 чел./ч, а интенсивность транспортных лево- и правоповоротного потоков не превышает 120 авт./ч. Недостатком известной системы управления движением на перекрестках является то, что она не исключает очаги повышенной аварийности для реальных условий движения на перекрестках, когда повышается их динамическая «конфликтная загрузка», то есть превышается нормируемая конфликтность в точках «просачивания» транспортных потоков - между собой и с пешеходными потоками.
Известна система управления движением на многополосных регулируемых перекрестках с многофазным разъездом транспортно-пешеходных потоков - с «просачиванием» и «без просачивания» (стр.9,10; стр.21-27; стр.61-76. Плотников А.М. Разработка схем организации движения транспортных и пешеходных потоков на регулируемых перекрестках. Учебное пособие для вузов. - СПб.: Нестор-История, 2010. - 110 с., 58 ил.). Копия ближайшего аналога приведена в Приложении к настоящему описанию заявки.
Эта система реализует многофазное светофорное регулирование транспортно-пешеходными потоками на многополосных перекрестках в вариантах: с «допустимым» и с «бесконфликтным» разделением конфликтующих транспортно-пешеходных потоков с использованием соответственно: трехфазной и четырехфазной схем организации движения (СОД).
Указанная система управления движением на многополосном перекрестке выбрана в качестве ближайшего аналога.
В известную систему управления движением на многополосном регулируемом перекрестке включены дорожный контроллер, транспортные светофоры с правой и левой дополнительными секциями, пешеходные светофоры, блоки особых предписаний направлений движения транспорта - «налево», «прямо» и «направо». Каждый дорожный знак особых предписаний направления движения по полосе из блока особых предписаний направлений движения транспорта установлен над каждой соответствующей полосой на подходах к стоп-линиям многополосного перекрестка. Число таких дорожных знаков определяется числом полос движения транспорта на каждом входе перекрестка. Число блоков особых предписаний направлений движения транспорта определяется числом входов регулируемого перекрестка, например: необходимо три блока для перекрестка с примыканием (т.е. «Т»-образного) и четыре блока для перекрестка с пересечением. Над всеми стоп-линиями могут быть установлены детекторы транспорта, например видеодетекторы, с охватом всех полос подъезда к регулируемому перекрестку через виртуальные рамки или магнитные рамки. Ближайший аналог решает однозначное разделение конфликтующих ТПП во времени в двух вариантах: первый с допустимым и второй с повышенным уровнем требований к дорожной безопасности. Первый вариант разрешает в пределах нормативных требований безопасности конфликтные маневры транспортных потоков между собой и с пешеходами (то есть «просачивание»), а второй - не разрешает конфликтные маневры на «просачивание» и реализует технологию концепции «нулевой смертности» - желаемый предел дорожной безопасности.
Недостатком ближайшего аналога является высокая длительность цикла светофорного регулирования, который ограничен «терпеливым ожиданием» в пределах 120 с для водителей и 40 с для пешеходов. Высокая длительность цикла светофорного регулирования ведет к транспортной задержке и снижению пропускной способности перекрестка в тех суточных временных диапазонах, где все лево- и правоповоротные потоки (или в определенных комбинациях) не превышают нормативный уровень допустимой безопасности.
В процессе проведенных информационных исследований не выявлены другие системы управления движением на многополосном регулируемом перекрестке, в котором каждая, по меньшей мере, одна дополнительная секция транспортного светофора снабжена узлом привода шторки, а блок особых предписаний направлений движения транспорта, предназначенных для каждой полосы, выполнен с возможностью изменения информационного предписания.
Задачей изобретения является разработка системы управления движением, обеспечивающей поддержание заданного уровня дорожной безопасности при максимальной средней пропускной способности регулируемого перекрестка.
Технический результат, определяющий решение поставленной задачи, заключается в обеспечении максимальной средней пропускной способности перекрестка при поддержании нормативного уровня требований к дорожной безопасности.
Технический результат достигается следующим образом.
Предлагается система управления движением на многополосных перекрестках, включающая дорожной контроллер, с которым соединены, по меньшей мере, три устройства управления движением по одному для каждого входа регулируемого перекрестка.
В каждое устройство управления движением включены транспортный светофор с, по меньшей мере, одной дополнительной секцией, по меньшей мере, один пешеходный светофор, детектор транспорта, которые соединены с дорожным контроллером, и блок особых предписаний направлений движения транспорта, предназначенных для каждой полосы.
В отличие от ближайшего аналога каждая, по меньшей мере, одна дополнительная секция каждого транспортного светофора снабжена и соединена с узлом привода шторки, соединенным с дорожным контроллером.
Все блоки особых предписаний направлений движения транспорта, предназначенных для каждой полосы, выполнены с возможностью изменения информационного предписания и соединены с дорожным контроллером.
Совокупность перечисленных отличительных признаков от ближайшего аналога достаточна для достижения указанного технического результата.
На фигуре 1 представлена система управления движением на многополосном перекрестке.
Принцип действия изобретения иллюстрируется и поясняется фигурами 2-8, где изображены:
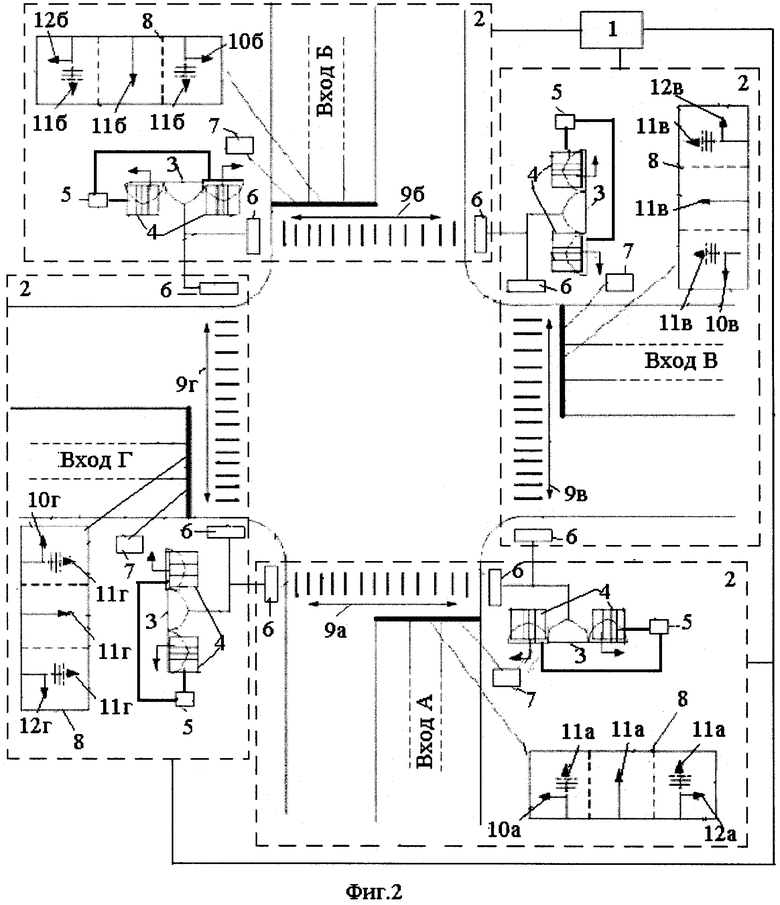
на фигуре 2 - план и оснащение системы управления на многополосном перекрестке с пересечением двух улиц;
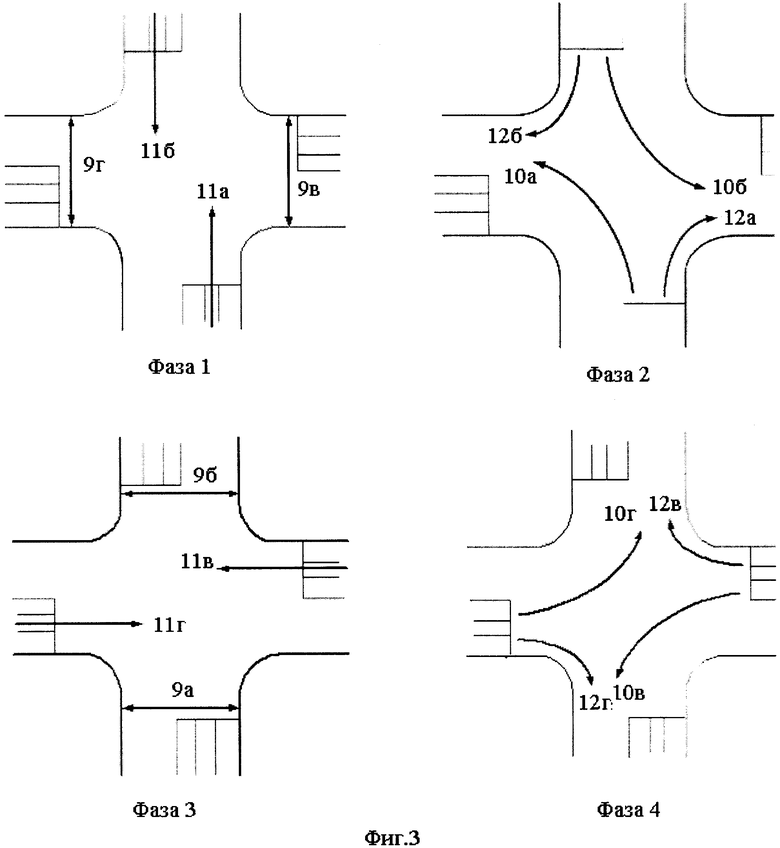
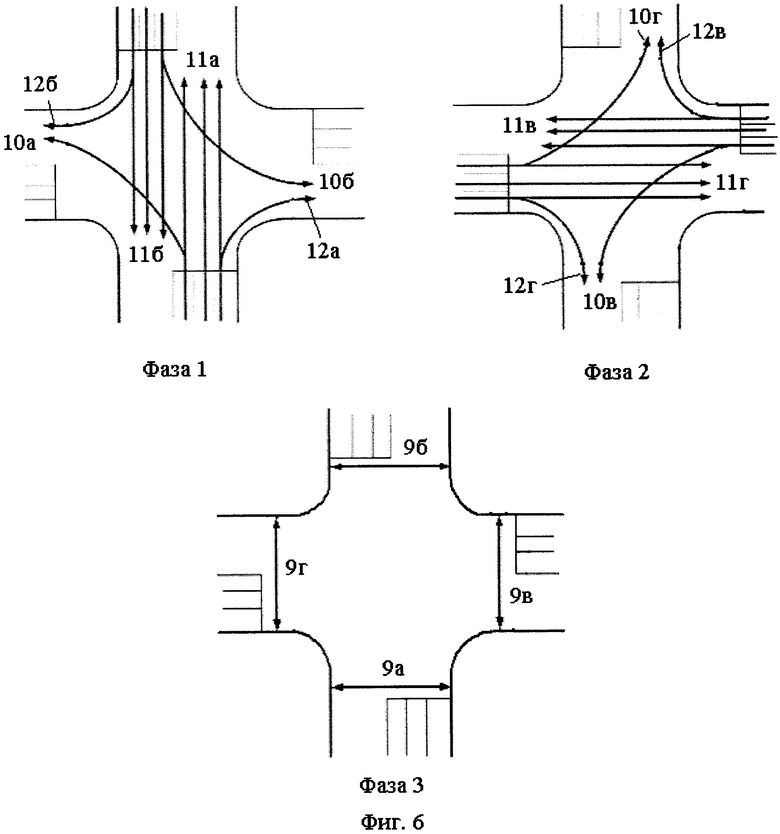
на фигуре 3 - четырехфазная СОД с пофазным принципом управления без просачивания, далее программа №1, которая реализует технологию концепции «нулевой смертности», где отсутствует конфликтная загрузка R=0, а длительность цикла светофорной сигнализации Тц=127 с;
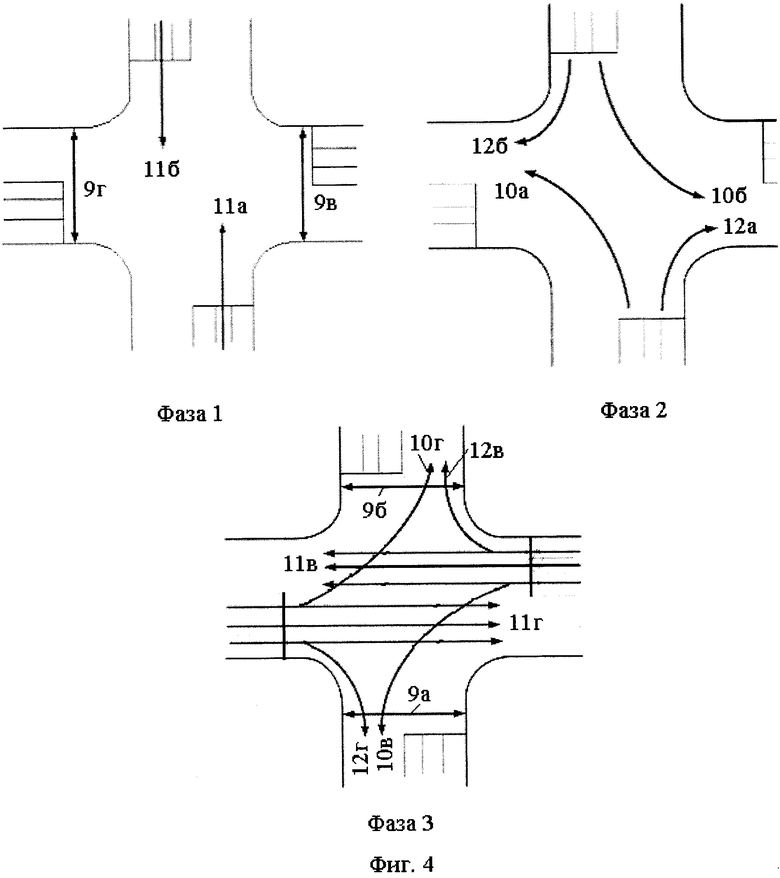
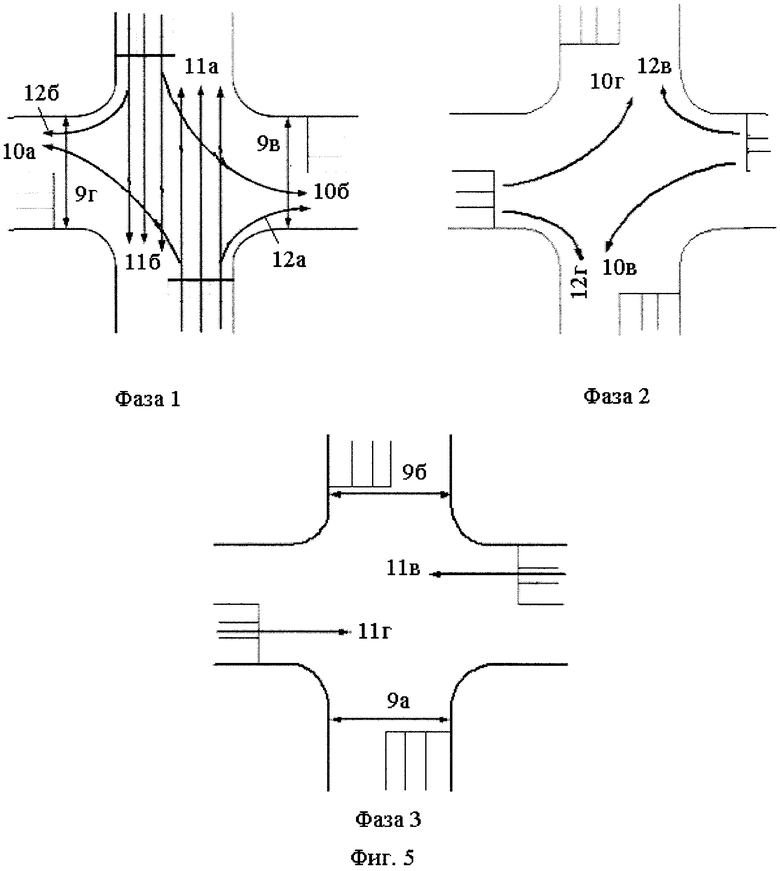
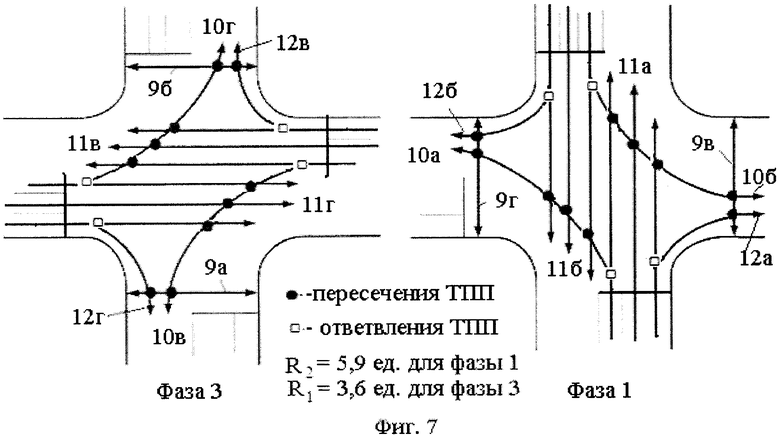
на фигурах 4 и 5 - трехфазная СОД с пофазным принципом управления с просачиванием при одинаковой длительности цикла светофорной сигнализации Тц=95 с, но различных численных значениях величин конфликтной загрузки, далее для фиг.4 программа №2 вариант 1 - R1=3,6 ед. (см. фиг.7 фаза 3), а для фиг.5 программа №3 вариант 2 - R2=5,9 ед. (см. фиг.7 фаза 1);
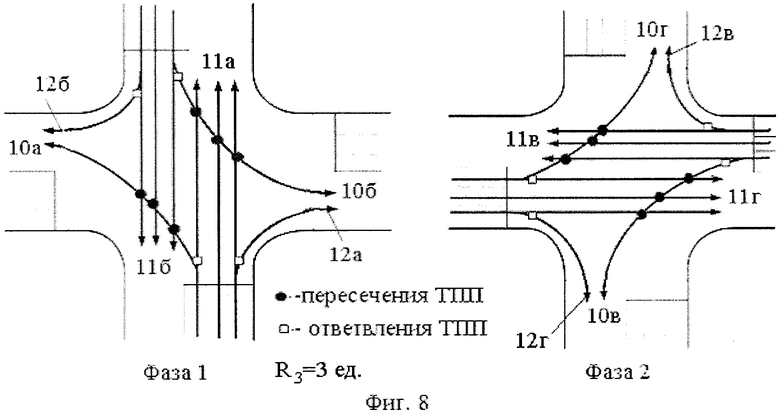
на фигуре 6 - трехфазная СОД с пофазным принципом управления с просачиванием только в транспортных потоках и с нулевой смертностью для пешеходных потоков, далее программа №4 с длительностью цикла светофорной сигнализации Тц=86 с и величиной конфликтной загрузки R3=3 ед. (см. фиг.8);
на фигуре 7 - схемы фаз с конфликтной загрузкой, по которым рассчитаны значения конфликтных загрузок регулируемого перекрестка соответственно для программ: №2 вариант 1 - R1=3,6 ед. фаза 3 (см. фиг.4) и №3 вариант 2 R2=5,9 ед. фаза 1 (см. фиг.5);
на фигуре 8 - схемы фаз 1 и 2 с конфликтной загрузкой, по которым рассчитана конфликтная загрузка R=3 ед. для программы №4 (см. фиг.6), а фаза 3 для пешеходов бесконфликтная.
Все расчеты численных значений Тц и R для упомянутых выше программ №1-№4 произведены априорно по статистике пиковых интенсивностей для ТПП примера перекрестка и записаны в память библиотеки жестких календарных программ дорожного контроллера заранее до начала работы.
Изобретение (фиг.1) включает дорожный контроллер 1 и, по меньшей мере, три устройства управления движением 2 по одному для каждого входа регулируемого перекрестка. В каждое устройство управления движением 2 включены транспортный светофор 3 с, по меньшей мере, одной дополнительной секцией 4 (правого/левого поворота транспорта), которая снабжена узлом привода шторки 5, и, по меньшей мере, один пешеходный светофор 6, детектор транспорта 7, блок особых предписаний направлений движения транспорта, предназначенных для каждой полосы 8, который выполнен с возможностью изменения информационного предписания. Дорожный контроллер 1 электрически соединен с транспортным светофором 3 с, по меньшей мере, одной дополнительной секцией 4 и с, по меньшей мере, одним пешеходным светофором 6, детектором транспорта 7, узлом привода шторки 5 и блоком особых предписаний направлений движения транспорта, предназначенных для каждой полосы 8, выполненным с возможностью изменения информационного предписания. Каждый узел привода шторки 5 соединен с соответствующей дополнительной секцией 4 транспортного светофора 3.
Система управления движением на многополосных перекрестках работает следующим образом.
Работа изобретения рассмотрена на конкретном примере (фиг.2) многополосного перекрестка с пересечением двух улиц. Система состоит из дорожного контроллера 1 (далее ДК 1), который соединен с четырьмя устройствами управления движением 2 (УУД 2).
Каждое из четырех УУД 2 управляет движением транспортно-пешеходных потоков (ТПП) на отдельных входах перекрестка: Вход А, Вход Б, Вход В и Вход Г, каждый вход с тремя размеченными полосами движения для въезда транспорта на перекресток или остановки у стоп-линий (жирная черта разметки) до пешеходных переходов типа «зебра». Все направления движения транспортно-пешеходных потоков, показанные на фигурах 2-8, пронумерованы с 9 по 12 с присвоением им буквенных индексов в соответствии с их привязкой к входам перекрестка, а именно: для движения пешеходных потоков приняты обозначения 9а, 9б, 9в и 9г, а для движения транспортных потоков приняты группы обозначений по трем полосам с соответствующими индексами (10а, 11а, 12а), (10б, 11б, 12б), (10в, 11в, 12в) и (10г, 11г, 12г), которые показаны на каждом блоке особых предписаний направлений движения транспорта, предназначенных для каждой полосы, выполнены с возможностью изменения информационного предписания 8 (УДЗ 8), подвешены соответственно над каждой полосой движения транспорта на растяжках или опорах перед каждой стоп-линией соответствующего входа перекрестка.
Электрические линии связи дорожного контроллера 1 с каждым элементом, входящим в устройство управления движением 2, на фиг.2 не показаны, чтобы не усложнять чертеж фиг.2.
Штриховые линии на всех прямых направлениях предписаний движения транспортных потоков (11а, 11б, 11в, 11г) для крайних входных полос налево (10а, 10б, 10в, 10г) и направо (12а, 12б, 12в, 12г) на УДЗ 8 фиг.2 условно указывают на изменение предписания - одновременно на прямые движения с поворотными или только на поворотные движения.
Каждое УУД 2 состоит из узла привода шторок 5 (ПШ 5), транспортного светофора 3 с правой и левой дополнительными секциями 4 (Т.1.пл) - по ГОСТ Р 52282-2004, где штриховкой на дополнительных секциях 4 условно показаны шторки черного цвета для закрытия и открытия соответствующих правой и левой дополнительных секций транспортных светофоров 3 Т.1.пл, с целью соответствующего перевода его в другой тип транспортных светофоров 3 (T.1) - по ГОСТ Р 52282-2004, без правых и левых дополнительных секций 4 и наоборот, пешеходного светофора 6 (П.1) - по ГОСТ Р 52282-2004, с соответствующими дублерами 6, детектора транспорта 7 (ДТ 7), для получения данных о численной интенсивности транспортных средств по каждой выделенной полосе движения в виде текущей (и интегральной) информации и передачи ее в ДК 1, блок особых предписаний направлений движения транспорта, предназначенных для каждой полосы, выполнен с возможностью изменения информационного предписания 8 (УДЗ 8), в котором дорожные знаки направления движения по полосе способны менять направления движения транспорта в каждой полосе в номенклатурном диапазоне своего типа 5.15.2 - по ГОСТ Р 52290-2004.
Например, в рассматриваемом примере на фигурах 2-8:
вид УДЗ 8 Вход А «налево 10а - прямо 11а», «прямо 11а», «прямо 1la - направо 12а» меняет информационное предписание в вид УДЗ 8 Вход А «налево 10а», «прямо 11а», «направо 12а»;
вид УДЗ 8 Вход Б «налево 10б - прямо 11б», «прямо 11б», «прямо 11б - направо 12б» меняет информационное предписание в вид УДЗ 8 Вход Б «налево 10б», «прямо 11б», «направо 12б»;
вид УДЗ 8 Вход В «налево 10в - прямо 11в», «прямо 11в», «прямо 11в - направо 12в» меняет информационное предписание в вид УДЗ 8 Вход В «налево 10в», «прямо 11в», «направо 12в»;
вид УДЗ 8 Вход Г «налево 10г - прямо 11г», «прямо 11г», «прямо 11г - направо 12г» меняет информационное предписание в вид УДЗ 8 Вход Г «налево 10г», «прямо 11г», «направо 12г» и наоборот. При этом одновременно все транспортные светофоры 3 из типа T.1, где все дополнительные секции 4 закрыты черными шторками, соответственно переходят в тип Т.1.пл, где все дополнительные секции 4 открыты и наоборот.
Началом работы системы управления движением на многополосном перекрестке (фиг.2) считается включение источника питания, в том числе и после аварийных ситуаций, когда светофорное регулирование транспортно-пешеходных потоков (ТПП) на перекрестке идет по программе №1 (фиг.3). То есть всегда первоначальное управление перекрестком происходит по технологии концепции «нулевой смертности». В этом случае все УДЗ 8 Вход А «налево 10а», «прямо 11а», «направо 12а» - УДЗ 8 Вход Г «налево 10г», «прямо 11г», «направо 12г» имеют однозначные направления движения транспорта и черные шторки перед каждой дополнительной секцией 4 транспортных светофоров 3 Т.1.пл (Вход А) - Т.1.пл (Вход Г) открыты командами от соответствующих ПШ 5 Вход А - ПШ 5 Вход Г. В пояснительном примере программа №1 (фиг.3), управляющая перекрестком, имеет длительность цикла светофорной сигнализации Тц=127 с и конфликтную загрузку R=0, которые записаны в память библиотеки жестких календарных программ дорожного контроллера 1 заранее до начала работы. Аналогично в память ДК 1 записаны и другие программы управления перекрестком №2 вариант 1 (фиг.4), №3 вариант 2 (фиг.5), №4 (фиг.6) и №5 (желтое мигание). Длительности цикла и конфликтные загрузки для указанных программ рассчитаны аналогично для примера статистики пиковых интенсивностей и граничных нормативных интенсивностей транспортных лево- и правоповоротных потоков 120 авт./ч и имеют следующие значения для алгоритмов программ: №2 вариант 1 (фиг.4) и №3 вариант 2 (фиг.5), имеющих одинаковую Тц=95с, но разные R1=3,6 ед. (фиг.7 фаза 3) и R2=5,9 ед. (фиг.7 фаза 1); №4 (фиг.6) Тц=86 с, а R3=3 ед. (фиг.8). Дополнительная программа №5 имеет режим желтого мигания с частотой 1 Гц. Это так называемый ночной режим, он включается и выключается по таймеру, размещенном в ДК 1.
С включением питания ДК 1 работает по программе №1 (фиг.3) в режиме реального времени в течение 3-5 циклов светофорной сигнализации. За это время детекторы транспорта ДТ 7 Вход А - ДТ 7 Вход Г измеряют на каждой входной полосе перекрестка интенсивность транспортных средств и передают в ДК 1. Он анализирует, по каким направлениям интенсивность лево- (10а, 10б, 10в, 10г) и правоповоротных (12а, 12б, 12в, 12г) транспортных средств соответствует (не соответствует) нормативной интенсивности движения. В зависимости от результата анализа ДК 1 адаптивно выбирает одну из библиотечных программ №2 (фиг.4), №3 (фиг.5), №4 (фиг.6). Например, на всех поворотных направлениях движения (10а, 10б, 10в, 10г и 12а, 12б, 12в, 12г) число транспортных средств не превышает 120 авт./ч, тогда ДК 1 проводит корректное переключение с программы №1 (фиг.3) на программу №4 (фиг.6) через сигнализацию «кругом красный» в течение временного интервала, равного длительности промежуточного такта 4 с, для пояснительного примера. За это время в дорожном контроллере 1 идет замена исходной программы №1 (фиг.3, где Тц=127 с и R=0) на программу №4 (фиг.6, где Тц=86 с и R=3 ед.). Одновременно ДК 1 дает сигналы на приводы шторок ПШ 5 Вход А - ПШ 5 Вход Г для закрытия черными шторками всех дополнительных секций 4 в транспортных светофорах 3 типа Т.1.пл (Вход А) - Т.1.пл (Вход Г), что переводит их соответственно в тип T.1 (Вход А) - T.1 (Вход Г). Одновременно с закрытием черных шторок ДК 1 дает команды на синхронную замену всех соответствующих направлений движения транспорта УДЗ 8 Вход А «налево 10а», «прямо 11а», «направо 12а» - УДЗ 8 Вход Г «налево 10г», «прямо 11г», «направо 12г» на соответствующие в УДЗ 8 Вход А «налево 10а - прямо 11а», «прямо 11а», «прямо 11а - направо 12а» - УДЗ 8 Вход Г «налево 10г - прямо 11г», «прямо 11г», «прямо 11г - направо 12г». Переход с программы №4 (фиг.6) на программу №2 вариант 1 (фиг.4, где Тц=95 с и R1=3,4 ед.) происходит после обнаружения ДТ 7 Вход А или ДТ 7 Вход Б превышения нормируемого порога (более 120 авт./ч) в любом из поворотных направлений движения (фиг.2) УДЗ 8 Вход А «налево 10а», «направо 12а» или в УДЗ 8 Вход Б «налево 10б», «направо 12б», и подачи сигнала об этом в ДК 1. Последний синхронно и соответственно переключает через приводы шторок ПШ 5 Вход А и ПШ 5 Вход Б два транспортных светофора 3 типа T.1 (Вход А) и T.1 (Вход Б) в тип Т.1.пл (Вход А) и Т.1.пл (Вход Б) путем открытия соответствующих черных шторок у правой и левой дополнительных секций 4 и синхронно изменяет направления движения транспорта в каждом из двух УДЗ 8 Вход А «налево 10а - прямо 11а», «прямо 11а», «прямо 11а - направо 12а» и УДЗ 8 Вход Б «налево 10б - прямо 11б», «прямо 11б», «прямо 11б - направо 12б» на соответствующие УДЗ 8 Вход А «налево 10а», «прямо 11а», «направо 12а» и УДЗ 8 Вход Б «налево 10б», «прямо 11б», «направо 12б». Аналогичен переход и с программы №4 (фиг.6) на программу №3 (фиг.5) вариант 2, но только после обнаружения ДТ 7 Вход В или ДТ 7 Вход Г превышения нормируемого порога (более 120 авт./ч) в любом из поворотных направлений движения (фиг.2) в УДЗ 8 Вход В «налево 10в», «направо 12в» или в УДЗ 8 Вход Г «налево 10г», «направо 12г» и выдачи сигнала об этом в ДК 1. Последний синхронно переключает через приводы шторок ПШ 5 Вход В и ПШ 5 Вход Г два транспортных светофора 3 из типа T.1 (Вход В), T.1 (Вход Г) в тип Т.1.пл (Вход В), Т.1.пл (Вход Г) через открытие соответствующих черных шторок у правой и левой дополнительных секций 4, а также изменяет направления движения транспорта в каждом из двух блоков в УДЗ 8 Вход В «налево 10в - прямо 11в», «прямо 11в», «прямо 11в - направо 12в» и в УДЗ 8 Вход Г «налево 10г - прямо 11г», «прямо 11г», «прямо 11г - направо 12г» на соответствующие в УДЗ 8 Вход В «налево 10в», «прямо 11в», «направо 12в» и в УДЗ 8 Вход Г «налево 10г», «прямо 11г», «направо 12».
В случае переключения регулируемого перекрестка в программу №5 из любой другой программы по таймеру или в ситуациях перегорания двух красных сигналов одновременно (основного и дублера) в транспортных 3 или пешеходных 6 светофорах в любом направлении, запрограммированном в ДК 1 на «контроль красных», то ДК 1 переводит все транспортные светофоры 3 в тип T.1 (Вход А) - T.1 (Вход Г), а все УДЗ 8 Вход А - УДЗ 8 Вход Г вне зависимости от их исходного состояния в вид УДЗ 8 Вход А «налево 10а-прямо 11а», «прямо 11а», «прямо 11а-направо 12а» - УДЗ 8 Вход Г «налево 10г - прямо 11г», «прямо 11г», «прямо 11г - направо 12г».
Переключения программ, из приведенных выше вариантов программ, в любой последовательности или обратные переключения, в том числе и с дополнительной программы №5 - дорожный контроллер 1 производит через сигнализацию «кругом красный» в течение временного интервала с длительностью промежуточного такта.
Существующие промышленные технологии и применяемые материалы позволяют организовать серийное производство предлагаемого изобретения для «Т»-образных (с примыканием) перекрестков и с пересечением улиц, в частности, если хотя бы одна из улиц имеет три полосы движения и более, а другая не менее двух полос и более во встречных направлениях движения.
Таким образом, предложенная система управления движением на многополосных перекрестках позволяет обеспечить достижение максимальной средней пропускной способности перекрестка при поддержании нормативного уровня требований к дорожной безопасности.
Изобретение относится к управлению движением на регулируемых перекрестках. Система управления движением на многополосных перекрестках содержит, по меньшей мере, три устройства управления движением. Каждое устройство содержит транспортный светофор с, по меньшей мере, одной дополнительной секцией и, по меньшей мере, один пешеходный светофор, а также детектор транспорта и блок особых предписаний направлений движения транспорта, которые соединены с дорожным контроллером. По меньшей мере, одна дополнительная секция транспортного светофора снабжена узлом привода шторки, а блок особых предписаний выполнен с возможностью изменения информационного предписания. Узел привода шторки соединен с дорожным контроллером и с, по меньшей мере, одной дополнительной секцией транспортного светофора. Решение направлено на повышение пропускной способности перекрестка. 8 ил.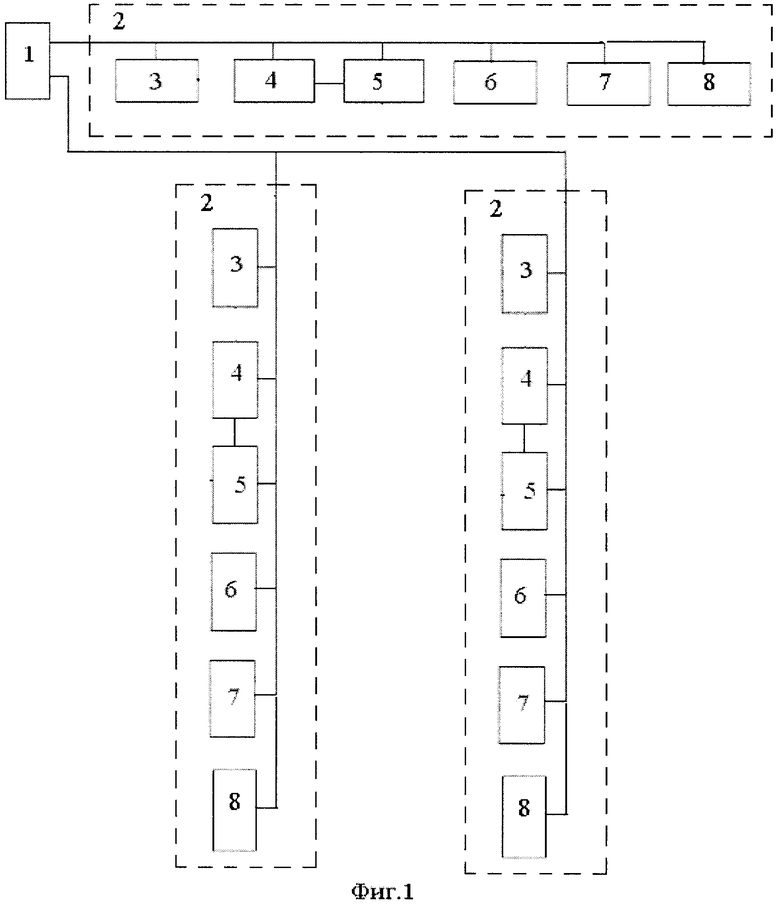
Система управления движением на многополосных перекрестках, включающая, по меньшей мере, три устройства управления движением по одному для каждого входа транспорта регулируемого перекрестка, в каждое из которых включены транспортный светофор с, по меньшей мере, одной дополнительной секцией и, по меньшей мере, один пешеходный светофор, детектор транспорта, которые соединены с дорожным контроллером и блок особых предписаний направлений движения транспорта, предназначенных для каждой полосы, отличающаяся тем, что каждая, по меньшей мере, одна дополнительная секция транспортного светофора снабжена узлом привода шторки, а блок особых предписаний направлений движения транспорта, предназначенных для каждой полосы, выполнен с возможностью изменения информационного предписания, при этом узел привода шторки и блок особых предписаний направлений движения транспорта, предназначенных для каждой полосы, соединены с дорожным контроллером, а узел привода шторки соединен с, по меньшей мере, одной дополнительной секцией транспортного светофора.
| ПЛОТНИКОВ A.M | |||
| РАЗРАБОТКА СХЕМ ОРГАНИЗАЦИИ ДВИЖЕНИЯ ТРАНСПОРТНЫХ И ПЕШЕХОДНЫХ ПОТОКОВ НА РЕГУЛИРУЕМЫХ ПЕРЕКРЕСТКАХ | |||
| - СПб.: НЕСТОР-ИСТОРИЯ, 2010, 110 с | |||
| СИСТЕМЫ ОРГАНИЗАЦИИ И УПРАВЛЕНИЯ БЕЗОПАСНОСТЬЮ ДОРОЖНОГО ДВИЖЕНИЯ | |||
| СБОРНИК ДОКЛАДОВ И СТАТЕЙ | |||
| - СПб.: ГОС.АРХИТ.-СТРОИТ | |||
| УН-Т, СЕНТЯБРЬ 2008, 136 с | |||
| СПРАВОЧНИК ПО БЕЗОПАСНОСТИ ДОРОЖНОГО ДВИЖЕНИЯ |

