Изобретение относится к технологической машине с приводом от двигателя, прежде всего к ручной машине, содержащей ведущий вал, приводимый в движение узлом привода, и рабочий, или ведомый, вал для установки рабочего инструмента.
В публикации DE 102004050798 A1 описана ручная машина с рабочим (ведомым) валом, который приводится в колебательное движение и на котором установлен рабочий инструмент, совершающий возвратно-вращательное движение, благодаря чему этот рабочий инструмент может применяться как для шлифования, так и для резания. Рабочий вал с установленным на нем рабочим инструментом приводится в движение эксцентриковым соединительным устройством (передаточным механизмом), которое получает движение от электрического двигателя. При этом вал электрического двигателя приводит в движение эксцентриковый диск, с которым входит в зацепление рычаг, жестко соединенный с рабочим валом, так что вращательное движение эксцентрикового диска вызывает колебательное движение рычага, а значит, и рабочего вала.
В подобных приводных механизмах необходимо обращать внимание на то, чтобы при передаче движения между валом двигателя и рабочим валом не возникали недопустимо высокие усилия в одном из валов или соединительном устройстве для передачи движения. Между всеми элементами конструкции, участвующими в передаче движения, должен существовать лишь сравнительно небольшой зазор для предотвращения быстрого износа, который может быстро нарастать в результате соударений между деталями, передающими движение, в случае слишком большого зазора. С другой стороны, в случае слишком малого зазора, что может иметь место, например, при слишком сильном натяге, существует опасность вызванного трением перегрева подшипников качения, находящихся под действием высокой динамической нагрузки.
Из публикации EP 0351179 A1 известна аккумуляторная дрель, имеющая приводной электродвигатель для привода рабочего вала (шпинделя). Вал электродвигателя расположен соосно с рабочим валом, для их соединения предусмотрен редуктор.
В публикации GB 2413300 A описана электрическая дрель, у которой вал электродвигателя проходит параллельно рабочему валу. Вал двигателя посредством муфты сцепления соединен с соосно расположенным промежуточным валом, установленным в двух подшипниках в корпусе с возможностью вращения. Вращательное движение промежуточного вала преобразуется посредством механической передачи во вращательное движение рабочего вала.
В основу изобретения положена задача создания с использованием простых конструктивных мероприятий технологической машины с приводом от двигателя и с рабочим инструментом вращательного действия, которая отличалась бы малой подверженностью изнашиванию и малым тепловыделением.
В соответствии с изобретением эта задача решается признаками пункта 1 формулы изобретения. Целесообразные варианты осуществления изобретения приведены в зависимых пунктах формулы изобретения.
Технологическая машина с приводом от двигателя, которой является, в частности, ручная машина с рабочим инструментом, совершающим колебательное (маятниковое) возвратно-вращательное движение, содержит узел привода, ведущий вал, приводимый в движение узлом привода, и ведомый, или рабочий, вал, на котором установлен рабочий инструмент, причем вращательное движение ведущего вала передается на рабочий вал посредством соединительного устройства. В предлагаемой в изобретении технологической машине ведущий вал установлен с возможностью вращения в двух подшипниках (обеспечивающих вращение опорах) в корпусе технологической машины, а соединительное устройство сопряжено с ведущим валом, т.е. взаимодействует с ним, на участке между двумя подшипниками. Такая конструкция имеет то преимущество, что ведущий вал может быть установлен в опорах корпуса технологической машины очень жестко, что позволяет передавать действующие на ведущий вал силы посредством стабильных и прочных подшипников на корпус технологической машины. Узел привода должен передавать на ведущий вал только крутящий момент без поперечных усилий. В варианте осуществления, где в качестве узла привода используется электрический двигатель, это осуществляется, в частности, таким образом, что ротор или вал якоря электрического двигателя устанавливается соосно с ведущим валом и соединяется с последним напрямую или через соединительный элемент. Изгибающие моменты, которые могут возникать вследствие взаимодействия между узлом привода и ведущим валом, с одной стороны, и рабочим валом и ведущим валом - с другой стороны, уже не воспринимаются ведущим валом, а передаются через оба подшипника ведущего вала на корпус технологической машины.
Оба подшипника ведущего вала, посредством которых он опирается на корпус, обеспечивают установку практически без люфтов, благодаря чему уменьшается износ в течение длительного периода эксплуатации. Вместе с тем, высокая степень прецизионности установки ведущего вала способствует поддержанию на низком уровне трения, что, кроме прочего, снижает опасность значительного выделения тепла и перегрева.
Другое преимущество заключается в снижении вибрации двигателя, поскольку приводной двигатель должен передавать на ведущий вал только крутящий момент практически без поперечных усилий. Этим, кроме того, обеспечивается возможность использования более компактных приводных узлов, что выражается в уменьшении потребления тока и увеличении срока службы аккумуляторной батареи.
В предлагаемой в изобретении технологической машине ведущий и рабочий валы расположены под углом друг к другу, а в корпусе технологической машины выполнено гнездо (чашеобразная опора) для размещения (установки) подшипника и торцевой части ведущего вала, расположенное между ведущим и рабочим валами.
В предпочтительном варианте осуществления изобретения ведущий и рабочий валы расположены под углом 90° друг к другу.
Это гнездо выполнено за одно целое с корпусом, так что силы, действующие в гнезде, передаются непосредственно на стенки корпуса. Благодаря тому, что гнездо расположено между ведущим и рабочим валами, достигается компактность конструктивного исполнения технологической машины, поскольку гнездо может быть расположено рядом с соединительным устройством для передачи движения между ведущим и рабочим валами, что не требует дополнительного конструктивного (монтажного) пространства.
В качестве узла привода используется, прежде всего, электрический двигатель, хотя возможным является также применение альтернативных приводных узлов, например гидравлических или пневматических. В случае электрического двигателя корпус последнего опирается со стороны ротора на корпус технологической машины, поскольку соединение между ротором электрического двигателя и ведущим валом служит исключительно для передачи крутящего момента, а не для обеспечения опоры для электрического двигателя. Эта опора, напротив, реализуется посредством опорного элемента между корпусами электрического двигателя и технологической машины.
Ротор узла привода может быть соединен с ведущим валом различными способами. Возможно применение как разъемного, так и неразъемного соединения, причем неразъемное соединение может быть выполнено как прессовое, а разъемное - в предпочтительном варианте - как соединение с геометрическим замыканием. Подобное соединение с геометрическим замыканием достигается, например, с помощью соединительного элемента, устанавливаемого на ротор узла привода и в целесообразном варианте вдвигаемого в профилированное отверстие в торце ведущего вала. Соединительное устройство между ведущим и рабочим валами в предпочтительном варианте выполнено в виде эксцентрикового соединительного устройства, посредством которого вращение ведущего вала преобразуется в колебательное возвратно-вращательное движение рабочего вала. Для этого эксцентриковое соединительное устройство в целесообразном варианте включает в себя соединительный элемент и эксцентрик, причем последний установлен на один из валов и взаимодействует с соединительным элементом, соединенным с другим валом. В качестве эксцентрика можно использовать, в частности, эксцентриковый кулачок, а соединительный элемент может быть выполнен, например, вильчатым и охватывать эксцентрик зубцами вилки.
Другие преимущества изобретения и целесообразные варианты его осуществления раскрыты в формуле изобретения, приведенном ниже в описании и на чертежах, на которых показано:
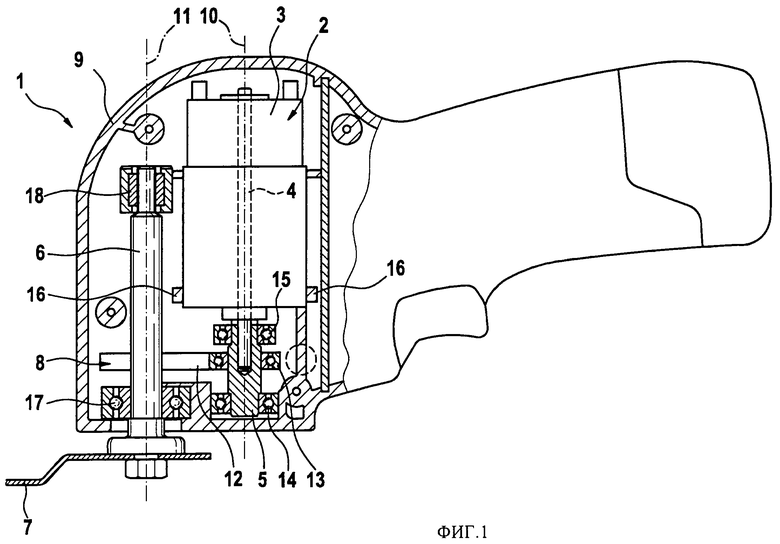
на фиг.1 - вид в разрезе ручной машины, рабочий инструмент которой совершает колебательное возвратно-вращательное движение для пиления и/или шлифования, с электрическим приводным двигателем, ротор которого приводит в движение ведущий вал, соосно установленный с возможностью вращения независимо от ротора в двух подшипниках в корпусе, причем ведомый (рабочий) вал расположен параллельно ротору и ведущему валу,
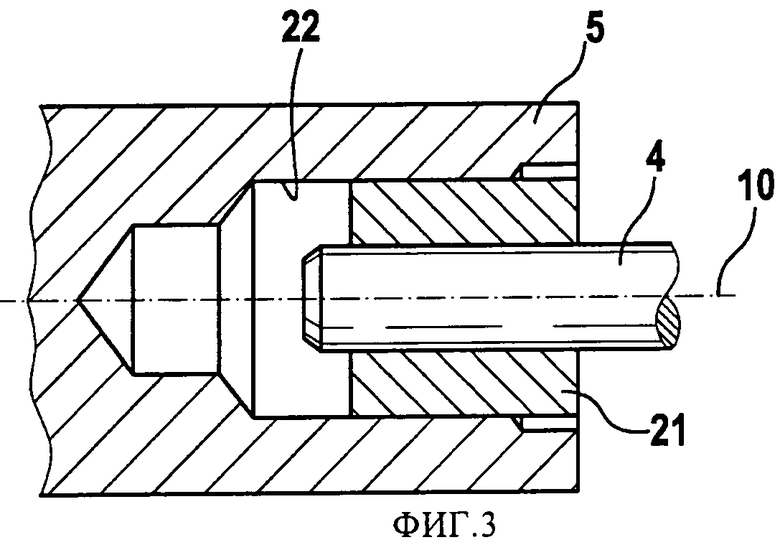
на фиг.2 - альтернативный вариант выполнения ручной машины, в котором ротор приводного двигателя и ведущий вал расположены под углом 90° к рабочему валу, причем ведущий вал связан с ротором через соединительный элемент с возможностью вращения вместе с ротором,
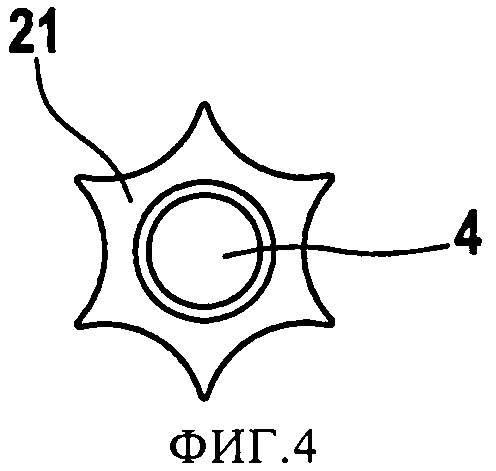
на фиг.3 - увеличенное изображение соединения ротора и ведущего вала посредством соединительного элемента,
на фиг.4 - вид сверху соединительного элемента.
Одинаковые элементы конструкции обозначены одинаковыми номерами позиций.
Изображенная на фиг.1 ручная машина 1 содержит в качестве узла привода электрический приводной двигатель 2, который расположен в корпусе 9 технологической машины и ротор 4 которого приводит во вращение соосно расположенный ведущий вал 5. Рабочий инструмент 7 жестко, с фиксацией от проворачивания, установлен на рабочем валу 6, расположенном параллельно ротору 4 и ведущему валу 5; номерами 10 и 11 обозначены параллельные друг другу оси вращения ротора 4 (или ведущего вала 5) и рабочего вала 6. Вращательное движение ведущего вала 5, которое он получает от ротора 4 приводного двигателя 2, преобразуется посредством эксцентрикового соединительного устройства (передаточного механизма) 8 в колебательное возвратно-вращательное движение рабочего вала 6. Это эксцентриковое соединительное устройство 8, расположенное между рабочим валом 6 и ведущим валом 5, включает в себя вилку 12, жестко, с фиксацией от проворачивания, установленную на рабочем валу 6, а также эксцентриковый кулачок 13, жестко, с фиксацией от проворачивания, установленный на ведущем валу 5. Вилка 12 имеет зубцы, охватывающие эксцентриковый кулачок 13 и прилегающие к контуру последнего. Таким образом, при вращении ведущего вала 5 вилка 12, отслеживая эксцентрический относительно оси вращения 10 контур эксцентрикового кулачка, передает циклическое изменение профиля на рабочий вал 6, который в результате совершает колебательное возвратно-вращательное движение.
Для максимально возможного исключения воздействия изгибающих усилий на ведущий вал 5 последний установлен (с возможностью вращения и независимо от ротора 4 электрического приводного двигателя 2) в двух подшипниках 14 и 15 в корпусе. Ротор 4 передает на ведущий вал 5 исключительно крутящий момент привода для вращения вокруг оси 10 без каких-либо других (или без существенных) моментов или усилий. Поскольку корпус электрического двигателя 2 не опирается на корпус технологической машины через ведущий вал 5, эта опора реализуется посредством дополнительных опорных элементов 16, воздействующих на корпус двигателя.
Для снижения нагрузок, действующих на ведущий вал 5, соединительное устройство 8 сопряжено с последним (взаимодействует с ним) на участке между подшипниками 14 и 15. Это реализуется расположением на этом участке промежутке эксцентрикового кулачка 13 как конструктивного элемента эксцентрикового соединительного устройства 8.
Кроме того, для получения максимально компактной конструкции предусмотрено, что рабочий вал 6 проходит в область корпуса электрического приводного двигателя 2, так что один участок рабочего вала 6 расположен параллельно корпусу двигателя. Рабочий вал 6 установлен с возможностью вращения в двух подшипниках 17 и 18 в корпусе, причем соседний с рабочим инструментом 7 первый подшипник 17 расположен на одном уровне с подшипником 14 ведущего вала 5 и параллельно ему, а второй подшипник 18 рабочего вала 6 располагается рядом с корпусом электрического приводного двигателя. Вилка 12 эксцентрикового соединительного устройства 8 примыкает к рабочему валу 6 на участке между подшипниками 17 и 18.
В примере осуществления на фиг.2 ручная машина также оснащена рабочим инструментом, совершающим колебательное возвратно-вращательное движение на рабочем валу 6, но в отличие от вышеописанного примера осуществления рабочий вал 6 располагается под углом 90° к ведущему валу 5, приводимому в движение ротором 4 электрического приводного двигателя 2. Ведущий вал 5 и в этом случае установлен с возможностью вращения в двух подшипниках 14 и 15 в корпусе 9а, являющемся съемной частью корпуса 9 технологической машины. Подшипник 14 установлен в гнезде 19, выполненном как единое целое с корпусом 9а. Это гнездо 19, в которое входит торцевая часть ведущего вала 5, находится в промежуточном пространстве между рабочим валом 6 и ведущим валом 5. Гнездо 19 ответвляется от участка корпуса, в котором расположен второй подшипник 18 рабочего вала 6.
Ведущий вал 5 с установленным на нем эксцентриковым кулачком 13 как составной частью эксцентрикового соединительного устройства может быть выполнен (вместе с подшипником 15 и контропорой 20, устанавливаемой в корпусе) в виде предварительно изготовленного модуля, который вставляется в корпус ручной машины как единое целое. В еще одном предпочтительном варианте осуществления ведущий вал с эксцентриковым кулачком 13 и подшипником 15, а также контропорой 20 соединяется с ротором электрического приводного двигателя 2 запрессовкой, таким образом образуя с последним единый модуль, который можно предварительно изготовить и вставить в корпус, причем требуется лишь ввести торцевую часть ведущего вала 5 в гнездо 19 и неподвижно соединить контропору 20 с корпусом. Кроме этого, корпус статора 3 электрического приводного двигателя 2 удерживается на корпусе 9 посредством опорных элементов 16.
На фиг.3 изображен фрагмент соединения ротора и ведущего вала 5. В данном варианте осуществления соединение реализуется посредством геометрического замыкания в окружном направлении и является разъемным в осевом направлении. Для этого предусмотрен соединительный элемент 21, надеваемый на ротор 4 и, как показано на фиг.4, имеющий звездообразный профиль. Этот соединительный элемент 21 вдвигается в отверстие 22, которое выполнено в осевом направлении с торцевой стороны в ведущем валу 5 и соответствующим образом спрофилировано, чтобы образовать геометрическое замыкание в направлении вращения.
В альтернативном варианте осуществления изобретения соединительный элемент располагается на торцевой части ведущего вала и вставляется в отверстие соответствующего профиля в торцевой части ротора 4.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕХНОЛОГИЧЕСКАЯ МАШИНА С ПРИВОДОМ ОТ ДВИГАТЕЛЯ | 2008 |
|
RU2484939C2 |
| РУЧНАЯ МАШИНА ДЛЯ РАБОЧИХ ИНСТРУМЕНТОВ УДАРНОГО ДЕЙСТВИЯ | 2008 |
|
RU2518020C2 |
| ТЕХНОЛОГИЧЕСКАЯ МАШИНА, ПРЕЖДЕ ВСЕГО ЭЛЕКТРИЧЕСКАЯ ТЕХНОЛОГИЧЕСКАЯ МАШИНА | 2011 |
|
RU2590426C2 |
| ЭЛЕКТРИЧЕСКАЯ РУЧНАЯ МАШИНА ДЛЯ СВЕРЛЕНИЯ В УДАРНО-ВРАЩАТЕЛЬНОМ РЕЖИМЕ ИЛИ ДОЛБЛЕНИЯ | 2007 |
|
RU2455144C2 |
| ИМПУЛЬСНО-СИЛОВАЯ РУЧНАЯ МАШИНА | 2013 |
|
RU2620399C2 |
| СИСТЕМА ПОДКЛЮЧЕНИЯ ПРИВОДНОГО ИСТОЧНИКА ДЛЯ ОСНАЩЕННОГО ПРИКРЕПЛЯЮЩИМСЯ УСТРОЙСТВОМ ЭЛЕКТРИЧЕСКОГО ПРИВОДНОГО ИНСТРУМЕНТА | 2011 |
|
RU2563614C2 |
| ПРИВОДНАЯ СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2530207C2 |
| ОБЪЕМНАЯ РОТОРНАЯ МАШИНА | 2004 |
|
RU2273739C2 |
| МНОГОСКОРОСТНОЙ ПЕРЕДАТОЧНЫЙ МЕХАНИЗМ И ТЕХНОЛОГИЧЕСКАЯ МАШИНА | 2008 |
|
RU2483862C2 |
| ИМПУЛЬСНО-СИЛОВАЯ РУЧНАЯ МАШИНА | 2010 |
|
RU2532790C2 |
Изобретение представляет собой ручную технологическую машину с приводом от двигателя, содержащую рабочий инструмент вращательного действия, ведущий вал и рабочий, на котором установлен рабочий инструмент. Вращательное движение ведущего вала передается на рабочий вал посредством соединительного устройства. Ведущий вал установлен с возможностью вращения в подшипниках в корпусе технологической машины, причем соединительное устройство сопряжено с ведущим валом на участке между двумя подшипниками. Обеспечивается снижение изнашивания и малое тепловыделение. 6 з.п. ф-лы, 4 ил.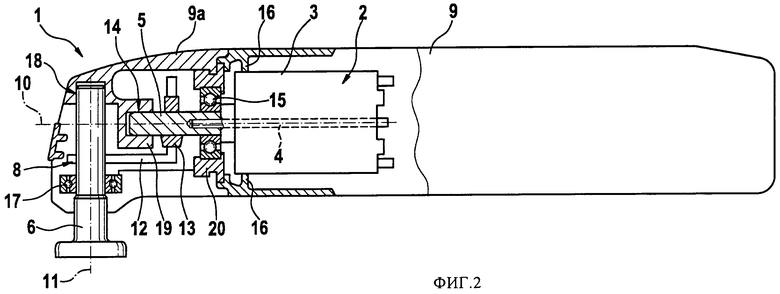
1. Технологическая машина с приводом от двигателя, прежде всего ручная машина (1), содержащая рабочий инструмент (7) вращательного действия, ведущий вал (5), приводимый в движение узлом (2) привода, и ведомый, или рабочий, вал (6), на котором установлен рабочий инструмент (7), причем вращательное движение ведущего вала (5) передается на рабочий вал (6) посредством соединительного устройства (8), ведущий вал (5) установлен с возможностью вращения в двух подшипниках (14, 15) в корпусе (9) технологической машины (1), а соединительное устройство (8) сопряжено с ведущим валом (5) на участке между двумя подшипниками (14, 15), отличающаяся тем, что ведущий (5) и рабочий (6) валы расположены под углом друг к другу, а в корпусе (9) технологической машины (1) выполнено гнездо (19) для размещения подшипника (14) и торцевой части ведущего вала (5), расположенное между ведущим (5) и рабочим (6) валами.
2. Технологическая машина по п.1, отличающаяся тем, что ведущий (5) и рабочий (6) валы расположены под углом 90° друг к другу.
3. Технологическая машина по п.1, отличающаяся тем, что узел (2) привода выполнен в виде электрического двигателя, ротор (4) которого приводит в движение ведущий вал (5).
4. Технологическая машина по п.3, отличающаяся тем, что корпус электрического двигателя (2) опирается со стороны ротора (4) на корпус (9) технологической машины.
5. Технологическая машина по п.3, отличающаяся тем, что ротор (4) узла (2) привода соединен с ведущим валом (5) разъемным образом.
6. Технологическая машина по п.3, отличающаяся тем, что ротор (4) узла (2) привода соединен с ведущим валом (5) посредством геометрического замыкания.
7. Технологическая машина по п.3, отличающаяся тем, что ротор (4) узла (2) привода соединен с ведущим валом (5) посредством соединительного элемента (21).
| ШИРОКОПОЛОСНЫЙ ЦИФРОВОЙ АВТОКОМПЕНСАЦИОННЫЙФАЗОМЕТРГ'" t^'^''^''9'li-i:^ | 0 |
|
SU351179A1 |
| СПОСОБ КОДИРОВАНИЯ ПАПИЛЛЯРНОГО УЗОРА | 2008 |
|
RU2413300C2 |
| DE 3811828 A1, 26.10.1989 | |||
| US 4031622 A, 28.06.1977 | |||
| Секция штрековой крепи | 1988 |
|
SU1610033A1 |

