Область техники, к которой относится изобретение
Настоящее изобретение в одном его аспекте относится к импульсно-силовой ручной машине с приводом от двигателя и новым ударным механизмом.
В других аспектах настоящее изобретение относится к ручной машине, в частности к импульсной резьбозавертывающей машине (например, к импульсному шуруповерту или гайковерту) с электронным управлением, создающей на выходе вращающую движущую силу.
Уровень техники
В импульсно-силовой ручной машине двигатель как источник мощности приводит в движение ударно-вращательный механизм для обеспечения вращения наковальни и нанесения по ней ударов, таким образом, прерывисто передавая рабочему инструменту ручной машины энергию вращательных, или тангенциальных, ударов (ударов, наносимых в направлении вращения, т.е. в окружном направлении) для выполнения рабочей операции, такой как заворачивание крепежного элемента (крепежного изделия) с целью образования резьбового соединения. В качестве двигателя таких машин широкое применение нашел бесщеточный электрический двигатель постоянного тока. Бесщеточный электрический двигатель постоянного тока является, например, двигателем постоянного тока без электрических щеток (используемых для коммутации). В таком двигателе со стороны статора используются катушки (обмотки), а со стороны ротора - магниты (постоянные магниты), и вращение ротора происходит в результате последовательной подачи на заданные катушки электрической энергии, выдаваемой инверторной схемой. Инверторная схема построена на полевых транзисторах (ПТ) и высокомощных выходных транзисторах, таких как биполярные транзисторы с изолированным затвором (БТИЗ, англ. сокр. IGBT), и питается большим током. Бесщеточный электрический двигатель постоянного тока имеет отличные моментные характеристики по сравнению со щеточным электрическим двигателем постоянного тока и способен заворачивать шуруп, саморез, болт и т.д. в материал основы или в ответную резьбу с большей силой.
В публикации JP-2009-072888-A раскрыта импульсно-силовая ручная машина с использованием бесщеточного электрического двигателя постоянного тока. Раскрытая в публикации JP-2009-072888-A импульсно-силовая ручная машина имеет ударный механизм, работающий при непрерывном вращении ротора двигателя. Когда к шпинделю через передаточный механизм (редуктор) прикладывается крутящий момент, ударник, установленный подвижно в направлении вращения вала шпинделя с возможностью его зацепления, вращается и приводит во вращение наковальню, в которую он упирается. Ударник и наковальня имеют по две молотковые выпуклые части (кулачки), которые расположены, соответственно, симметрично друг другу в двух местах в плоскости вращения, причем эти выпуклые части расположены, в направлении вращения, в местах зацепления зубчатых колес, и вращение силы удара передается за счет сцепления между выпуклыми частями ударника и наковальни. Ударник установлен по скользящей посадке с возможностью осевого перемещения относительно шпинделя в кольцевой области, окружающей шпиндель, а во внутренней периферийной поверхности ударника имеется V-образная криволинейная канавка в форме перевернутого "V" (практически треугольной формы). В наружной периферийной поверхности шпинделя выполнена V-образная криволинейная канавка, проходящая в осевом направлении, и ударник приводится во вращение посредством шариков (стальных шариков), установленных между криволинейной канавкой шпинделя и внутренней периферийной криволинейной канавкой ударника.
В обычном передаточном механизме шпиндель и ударник удерживаются относительно друг друга шариками, расположенными в криволинейных канавках, а ударник выполнен таким образом, чтобы он мог отводиться от шпинделя назад в осевом направлении под действием пружины, расположенной на его заднем конце. В результате увеличивается количество деталей шпинделя и ударника и требуется высокая точность сопряжения шпинделя с ударником, что приводит к увеличению производственных затрат.
Между тем, в импульсно-силовой ручной машине обычной конструкции для отключения ударного механизма (т.е. для работы в безударном режиме) необходимо иметь, например, механизм для управления отводом ударника от шпинделя. Импульсно-силовая ручная машина по публикации JP-2009-072888-A не может использоваться в так называемом режиме сверления. Далее, даже если режим сверления реализован (предусмотрен управляемый отвод ударника от шпинделя), то для срабатывания механизма защиты за счет прерывания передачи мощности при достижении заданного крутящего момента затяжки необходимо отдельно предусмотреть механизм электронной предохранительной муфты, а реализация в импульсно-силовой ручной машине режима сверления и режима сверления с задействованием электронной предохранительной муфты ведет к увеличению стоимости.
Далее, в публикации JP-2009-072888-A подаваемая в двигатель электрическая энергия привода является постоянной вне зависимости от состояния рабочего инструмента в отношении нагрузки на него при нанесении ударов ударником. Соответственно, нанесение ударов при заворачивании крепежного элемента выполняется с высоким крутящим моментом даже при легкой нагрузке. В результате в двигатель подается излишняя электрическая энергия, и происходит бесполезное расходование энергии. Кроме того, это чревато так называемым срывом рабочего инструмента с головки крепежного элемента, когда шуруп или саморез при его заворачивании в ударном режиме с высоким крутящим моментом углубляется чрезмерно, и рабочий инструмент срывается с головки шурупа или самореза.
Обычная ручная машина, как правило, имеет двигатель, ударник, приводимый во вращение от двигателя, и наковальню, к которой при ее столкновении с ударником прикладывается крутящий момент (см., например, публикацию JP-2008-307664-A). При приложении переданного наковальне крутящего момента к рабочему инструменту последний выполняет работу по заворачиванию шурупа, самореза, болта и т.п. В такой ручной машине при столкновении ведущего выступа, предусмотренного на ударнике, и ведомого выступа, предусмотренного на наковальне, крутящий момент прикладывается к наковальне и передается на рабочий инструмент.
Однако в обычной ручной машине ведущий выступ сталкивается с ведомым выступом в состоянии, когда он разогнался под действием двигателя. Поэтому возникает проблема увеличения силы удара при столкновении ведущего и ведомого выступов и, соответственно, увеличения крутящего момента заворачивания. В частности, при дотяжке уже затянутого шурупа, самореза, болта и т.п., поскольку к крепежному элементу (изделию) уже был приложен крутящий момент затяжки, момент затяжки из-за удара при столкновении ведущего и ведомого выступов может стать чрезмерно высоким. Таким образом, цель изобретения заключается в создании ручной машины с возможностью предотвращения приложения к крепежному элементу крутящего момента, превышающего заданное значение.
Среди обычных ручных машин известна ручная машина, в которой после определения достижения заданного крутящего момента подача электрической энергии в двигатель автоматически прекращается. Хотя подобная продукция уже предлагается на рынке, прекращение подачи электрической энергии в двигатель происходит, например, при приложении тянущего усилия к сетевому шнуру питания в случае питания ручной машины от сети, или при падении остаточного заряда аккумуляторной батареи ниже заданного уровня в случае использования заряжаемой аккумуляторной батареи, но не при достижении заданных крутящих моментов. Поэтому при достижении ручной машиной заданного крутящего момента необходимо, чтобы это событие отчетливо воспринималось оператором.
Однако в случае обычной ручной машины ее работа продолжается до тех пор, пока оператор не снимет свой палец с клавиши пускового выключателя. Таким образом, имеет место бесполезное расходование энергии, а также повышение температуры двигателя. Особенно в сравнении с нормальной (безударной) работой ручной машины (ротор двигателя вращается непрерывно в одном направлении) при работе ручной машины в прерывистом режиме нормальное вращение ротора двигателя и его остановка повторяются. Таким образом, потребление энергии и повышение температуры аккумуляторной батареи становятся заметными. Таким образом, цель изобретения заключается в создании ручной машины, которая при достижении заданного крутящего момента обеспечивала бы легкость восприятия этого события оператором. Другой целью изобретения является создание ручной машины, препятствующей бесполезному расходованию электрической энергии и обеспечивающей высокую точность регулирования крутящего момента, а также легкость восприятия события достижения заданного крутящего момента.
Оператор может ввести рабочий инструмент ручной машины в сопряжение с шурупом, саморезом, болтом и т.п. и нажать на клавишу пускового включателя, начав заворачивание крепежного элемента. Когда оператор заворачивает болт в элемент с уже имеющейся резьбой, сопротивление заворачиванию мало, и ток при заворачивании болта имеет низкое значение, но в момент посадки болта (его заворачивания до упора) значение тока резко возрастает и сразу превышает пороговое значение.
Даже если в подобном случае двигатель выключить, отпустив клавишу пускового выключателя, остановка вращения запоздает из инерции двигателя, и болт затянется с крутящим моментом, равным или большим требуемого значения. Таким образом, цель изобретения заключается в создании ручной машины, способной выдавать точно заданный крутящий момент.
В обычной ручной машине известна конструкция, в которой по наковальне в заданном направлении бьет ударник, вращающийся в указанном заданном направлении (см., например, публикацию JP-2008-307664-A).
Однако если нажать на клавишу пускового выключателя обычной ручной машины в состоянии, когда в момент пуска двигателя сопряжение между шлицем шурупа или саморезом и рабочим инструментом является неплотным, рабочий инструмент может выйти из зацепления с шурупом или саморезом, и головка соответствующего крепежного элемента может быть повреждена. Таким образом, цель изобретения заключается в создании ручной машины, способной предотвращать выход рабочего инструмента из зацепления с крепежным элементом.
В обычной ручной машине управление двигателем осуществляется независимо от температуры объекта, расположенного в корпусе ручной машины (см., например, публикацию JP-2010-058186-А).
В обычной ручной машине двигатель приводится в действие без учета выделения тепла объектом, расположенным в корпусе ручной машины. Поэтому, например, если окружающая температура низка, в этом случае вязкость смазки в редукторе изменяется, смазка густеет, и значение тока в двигателе увеличивается. Поэтому подаваемую в двигатель электрическую энергию необходимо изменять в зависимости от того, является ли окружающая температура низкой или высокой.
Кроме того, если окружающая температура высока, переключающие элементы, предназначенные для подачи электрической энергии на катушки двигателя, выделяя тепло, могут выйти из строя. Поэтому необходимо предотвращать чрезмерное повышение температуры переключающих элементов. Цель изобретения заключается в создании ручной машины, приспособленной для изменения способа управления двигателем в соответствии с температурой расположенного в корпусе объекта.
В обычной ручной машине известна конструкция, в которой по наковальне в заданном направлении бьет ударник, вращающийся в указанном заданном направлении (см., например, публикацию JP-2008-307664-A).
Между тем заявителем была разработана импульсная резьбозавертывающая машина с электронным управлением, выполненная с возможностью приведения ударника в нормальное и обратное вращения, в результате которого ударник бьет по наковальне. Однако в разработанной заявителем импульсной резьбозавертывающей машине с электронным управлением рабочий инструмент может выйти из сопряжения (зацепления) с шурупом, саморезом, болтом и т.п., что может привести к повреждению головки соответствующего крепежного элемента. Кроме того, реакция крепежного элемента при его посадке, т.е. по окончании его заворачивания, создает рывок, действующий на ручную машину в направлении, обратном направлению вращения, и оператор ручной машины испытывает дискомфорт. Таким образом, цель изобретения заключается в создании ручной машины, обеспечивающей уменьшение силы реакции (противодействия затяжке) со стороны крепежного элемента.
Обычная ручная машина приспособлена для вращения крепежного элемента посредством выходного вала. Управление двигателем остается неизменным даже при использовании различных крепежных элементов (см., например, публикацию JP-2008-307664-A).
Однако с помощью обычной ручной машины заворачивание крепежных элементов в соответствии с их типом является затруднительным. В частности, при заворачивании шурупа или самореза подобный крепежный элемент необходимо затягивать даже после посадки, а управление двигателем должно обеспечивать передачу на рабочий инструмент высокого крутящего момента. Если же заворачиваемым крепежным элементом является болт, его после посадки дополнительно завернуть невозможно. Таким образом, если длительность импульсов нормального вращения велика, реакция болта создает усилие, действующее на ударную резьбозавертывающую машину в направлении, обратном направлению вращения, и оператор испытывает дискомфорт. Соответственно, цель изобретения заключается в создании ручной машины, способной распознавать вид заворачиваемого крепежного элемента. В такой ручной машине управление двигателем при работе с различными крепежными элементами может варьироваться.
В электрической ударной резьбозавертывающей машине, являющейся примером обычной ручной машины, вал двигателя вращается в заданном направлении вращения для приведения ударника во вращение в указанном заданном направлении, а также для приведения наковальни во вращение в указанном заданном направлении (см., например, публикацию JP-2008-307664-А).
В обычной ручной машине управление двигателем осуществляется независимо от температуры расположенного в корпусе объекта. Дополнительно, как вариант осуществления изобретения, в ручной машине ротор двигателя совершает нормальное вращение или обратное вращение, выделение тепла двигателем увеличивается. Таким образом, в ручной машине, в которой выделение тепла двигателем становится большим, температура двигателя может чрезмерно повыситься, если управление двигателем осуществляется независимо от температуры двигателя. Цель изобретения заключается в создании ручной машины с возможностью управления двигателем в соответствии с температурой объекта, расположенного в корпусе ручной машины. В подобной ручной машине чрезмерные повышения температуры объекта, расположенного в корпусе ручной машины, случаются редко.
В обычной ручной машине известна конструкция, в которой по наковальне в заданном направлении бьет ударник, вращающийся в указанном заданном направлении (см., например, публикацию JP-2008-307664-A).
Между тем, заявителем была разработана импульсная резьбозавертывающая машина с электронным управлением, выполненная с возможностью приведения ударника в нормальное и обратное вращение, в результате которого ударник бьет по наковальне. Однако в разработанной заявителем импульсной резьбозавертывающей машине с электронным управлением при большом времени нормального вращения во время работы с высокой нагрузкой реакция ударной резьбозавертывающей машины также увеличивается, и оператор испытывает повышенный дискомфорт. Таким образом, цель изобретения заключается в создании ручной машины, которая была бы удобной в использовании.
Раскрытие изобретения
Одной целью изобретения является создание импульсно-силовой ручной машины с простым ударным механизмом, образованным ударником и наковальней.
Другой целью изобретения является создание импульсно-силовой ручной машины, в которой ударник и наковальня при заворачивании крепежного элемента поворачивались бы относительно друг друга на угол менее 360°, за счет разработки соответствующего способа управления двигателем.
В соответствии с пунктом 1 формулы настоящего изобретения предлагается импульсно-силовая ручная машина, содержащая двигатель, приводимый в действие в прерывистом режиме, соединенный с двигателем ударник, наковальню, ударяемую ударником для сообщения вращения/ударов рабочему инструменту, и блок управления, управляющий вращением ротора двигателя путем переключения подаваемого в двигатель управляющего импульса в соответствии с нагрузкой, приложенной к рабочему инструменту.
В соответствии с пунктом 2 формулы настоящего изобретения в предлагаемой импульсно-силовой ручной машине может быть предусмотрена возможность переключения блоком управления управляющего импульса на основании частоты вращения ротора двигателя.
В соответствии с пунктом 3 формулы настоящего изобретения в предлагаемой импульсно-силовой ручной машине может быть предусмотрена возможность переключения блоком управления управляющего импульса на основании изменения управляющего тока, поступающего в двигатель.
В соответствии с пунктом 4 формулы настоящего изобретения в предлагаемой импульсно-силовой ручной машине может быть предусмотрена возможность изменения блоком управления времени (продолжительности) выдачи управляющего импульса в соответствии с нагрузкой на рабочий инструмент.
В соответствии с пунктом 5 формулы настоящего изобретения в предлагаемой импульсно-силовой ручной машине может быть предусмотрена возможность изменения блоком управления эффективного значения управляющего импульса в соответствии с нагрузкой на рабочий инструмент.
В соответствии с пунктом 6 формулы настоящего изобретения в предлагаемой импульсно-силовой ручной машине может быть предусмотрена возможность изменения блоком управления максимального значения управляющего импульса в соответствии с нагрузкой на рабочий инструмент.
В соответствии с пунктом 7 формулы настоящего изобретения в предлагаемой импульсно-силовой ручной машине прерывистый режим приведения в действие двигателя может включать в себя: первый прерывистый режим привода, в котором двигатель приводится только в нормальное вращение, и второй прерывистый режим привода, в котором двигатель приводится в нормальное вращение и в обратное вращение.
В соответствии с пунктом 8 формулы настоящего изобретения в предлагаемой импульсно-силовой ручной машине может быть предусмотрена возможность подачи блоком управления управляющего импульса в двигатель с чередованием участков, на которых управляющий ток в двигатель подается и не подается.
В соответствии с пунктом 1 формулы изобретения, поскольку двигатель приводится в действие в прерывистом режиме, а блок управления переключает подаваемый в двигатель управляющий импульс в соответствии с состоянием по нагрузке, приложенной к рабочему инструменту, это позволяет предотвращать бесполезное расходование электрической энергии, когда нагрузка, приложенная к рабочему инструменту, невелика. Далее, это позволяет исключить такое явление, как срыв рабочего инструмента с головки крепежного элемента, когда рабочий инструмент отделяется от головки шурупа, самореза, болта и т.п. из-за привода рабочего инструмента высокой электрической энергией во время работы при легкой нагрузке.
В соответствии с пунктом 2 формулы изобретения, поскольку блок управления переключает управляющий импульс на основании частоты вращения ротора двигателя, управление переключением управляющего импульса может выполняться с использованием датчика частоты вращения, который обычно включается в состав схем управления. Соответственно, это обеспечивает упрощение и/или удешевление компоновки блока управления.
В соответствии с пунктом 3 формулы изобретения, поскольку блок управления переключает управляющий импульс на основании изменения управляющего тока, поступающего в двигатель, управление переключением управляющего импульса может выполняться с использованием датчика тока, который обычно включается в состав схем управления. Соответственно, это обеспечивает упрощение и/или удешевление компоновки блока управления.
В соответствии с пунктом 4 формулы изобретения, поскольку блок управления изменяет время выдачи управляющего импульса в соответствии с состоянием рабочего инструмента по нагрузке, крутящий момент во время ударов можно регулировать, уменьшая подаваемый в двигатель пиковый ток. Таким образом, не нужно увеличивать переключающий элемент, используемый для работы инверторной схемы.
В соответствии с пунктом 5 формулы изобретения, поскольку блок управления изменяет время выдачи управляющего импульса в соответствии с состоянием рабочего инструмента по нагрузке, переключающий элемент в инверторной схеме может быть защищен от избыточного тока.
В соответствии с пунктом 6 формулы изобретения, поскольку блок управления изменяет максимальное значение управляющего импульса в соответствии с состоянием рабочего инструмента по нагрузке, это позволяет исключить бесполезное расходование электрической энергии, когда нагрузка, приложенная к рабочему инструменту, невелика.
В соответствии с пунктом 7 формулы изобретения, поскольку предусмотрено два различных прерывистых режима привода, включающих в себя прерывистый режим, в котором двигатель приводится только в нормальное вращение, и прерывистый режим, в котором двигатель приводится в нормальное и обратное вращения, в первом из двух указанных прерывистых режимов (только нормальное вращение) заворачивание крепежного элемента может выполняться на высокой скорости меньшим крутящим моментом, а во втором из двух указанных прерывистых режимов (нормальное вращение и обратное вращение) крепежный элемент может быть надежно завернут более высоким крутящим моментом.
В соответствии с пунктом 8 формулы изобретения, поскольку блок управления подает управляющий импульс в двигатель с чередованием участков, на которых управляющий ток в двигатель подается и не подается, для реализации прерывистого режима привода может использоваться обычная инверторная схема.
Для достижения указанной выше цели в изобретении предлагается импульсная резьбозавертывающая машина с электронным управлением, содержащая приводимый во вращение двигатель, ударник, вращаемый движущей силой, передаваемой ему от двигателя, наковальню, установленную отдельно от ударника и приводимую ударником во вращение заодно с ним, держатель рабочего инструмента, способный удерживать рабочий инструмент и передавать ему вращение наковальни, устройство электропитания, снабжающее двигатель электрической энергией привода, и блок управления, управляющий устройством электропитания таким образом, чтобы прекращать подачу электрической энергии привода в двигатель в случае, если электрический ток, поступающий в двигатель в состоянии подачи электрической энергии привода, увеличился до заданного значения. Блок управления управляет устройством электропитания таким образом, чтобы перед подачей электрической энергии привода подавать в двигатель электрическую энергию для плавного пуска двигателя, меньшую по сравнению с электрической энергией привода, чтобы устройство электропитания начинало подавать электрическую энергию привода в состоянии, когда ударник и наковальня приведены в контакт друг с другом.
Благодаря такому решению, ударник и наковальня приводятся в контакт друг с другом путем подачи в двигатель электрической энергии для его плавного пуска, прежде чем будет подана электрическая энергия привода. Таким образом можно предотвратить ударное приложение к крепежному элементу крутящего момента, превышающего заданное значение.
Кроме того, в изобретении предлагается ручная машина, содержащая двигатель, служащий источником мощности, ударник, соединенный с двигателем и приводимый им во вращение, и наковальню, установленную с возможностью вращения относительно ударника, причем двигатель способен подавать на ударник первую мощность, обеспечивающую совместное вращение ударника и наковальни (когда наковальня вращается заодно с ударником, ведомая им), и вторую мощность, меньшую первой мощности. Вторая мощность подается на ударник в начале пуска двигателя, а первая мощность подается на ударник после подачи второй мощности.
Благодаря такому решению, поскольку на ударник подается мощность плавного пуска, это предотвращает столкновение ударника и наковальни с сильным ударом. Таким образом, предотвращается создание высокого крутящего момента, обусловленного ударом между ударником и наковальней. Поэтому заворачивание крепежного элемента путем приложения к нему рабочим инструментом крутящего момента, превышающего заданное значение, случается редко.
Кроме того, в изобретении предлагается ручная машина, содержащая электрический двигатель, ударник, соединенный с электрическим двигателем, и наковальню, установленную с возможностью вращения относительно ударника, причем в двигатель может подаваться первая электрическая энергия и вторая электрическая энергия, меньшая первой электрической энергии. Вторая электрическая энергия подается в электрический двигатель в начале пуска двигателя, а первая электрическая энергия подается в электрический двигатель после подачи второй электрической энергии.
Благодаря такому решению, поскольку в двигатель подается напряжение нормального вращения для плавного пуска, это предотвращает столкновение ударника и наковальни с сильным ударом. Таким образом, предотвращается создание высокого крутящего момента, обусловленного ударом между ударником и наковальней. Поэтому заворачивание крепежного элемента путем приложения к нему рабочим инструментом крутящего момента, превышающего заданное значение, случается редко.
В предпочтительном варианте осуществления изобретения ударник способен наносить удары по наковальне.
Предпочтительно прекращать подачу в двигатель электрической энергии при обнаружении подачи в двигатель заданной электрической энергии.
Поскольку благодаря такому решению подача электрической энергии в двигатель прекращается автоматически, крутящий момент затяжки крепежного элемента может создаваться с высокой точностью. Таким образом, благодаря синергетическому с плавным пуском эффекту можно получить точный крутящий момент затяжки.
В предпочтительном варианте осуществления изобретения время, в течение которого подается вторая электрическая энергия, превышает время, проходящее до вхождения наковальни и ударника в контакт друг с другом.
Благодаря применению подобной конструкции для того, чтобы сделать время плавного пуска превышающим время, проходящее до вхождения ударника и наковальни в контакт друг с другом, ударник и наковальня успевают войти в контакт друг с другом в течение времени плавного пуска. Таким образом, предотвращается сильный удар ударника по наковальне. Это позволяет уменьшить силу удара при столкновении наковальни и ударника. Если время плавного пуска меньше времени, проходящего до вхождения ударника и наковальни в контакт друг с другом, ударник ускоряется и бьет по наковальне, и на наковальню от ударника передается сильный удар.
В предпочтительном варианте осуществления изобретения ручная машина также имеет пусковой выключатель, обеспечивающий подачу в двигатель электрической энергии и возможность изменения подаваемого в двигатель количества электрической энергии, и чтобы вторая электрическая энергия была меньше заданного значения вне зависимости от степени нажатия на клавишу пускового выключателя.
В предпочтительном варианте осуществления изобретения количество подаваемой в двигатель электрической энергии можно изменять путем изменения коэффициента заполнения широтно-импульсно-модулированного сигнала (ШИМ-сигнал).
В предпочтительном варианте осуществления изобретения в течение заданного времени вторая электрическая энергия меньше заданного значения.
Изобретение также позволяет создать ручную машину, не допускающую приложение к крепежному элементу крутящего момента, превышающего заданное значение.
Для достижения этой цели в изобретении предлагается импульсная резьбозавертывающая машина с электронным управлением, содержащая двигатель, приводимый в нормальное и обратное вращения, ударник, вращаемый в направлении нормального или обратного вращения движущей силой, передаваемой ему от двигателя, наковальню, установленную отдельно от ударника и приводимую ударником в нормальное вращение заодно с ним, держатель рабочего инструмента, способный удерживать рабочий инструмент и передавать ему вращение наковальни, устройство электропитания, способное подавать в двигатель электрическую энергию нормального вращения для приведения ударника во вращение, электрическую энергию нормального вращения для имитации срабатывания предохранительной муфты, меньшую, чем электрическая энергия нормального вращения для приведения ударника во вращение, и электрическую энергию обратного вращения для имитации срабатывания предохранительной муфты, имеющую меньшее абсолютное значение, чем электрическая энергия нормального вращения для приведения ударника во вращение, и блок управления, управляющий устройством электропитания с возможностью попеременного включения подачи в двигатель электрической энергии нормального и обратного вращений для имитации срабатывания предохранительной муфты с переводом двигателя в режим имитации проскальзывания предохранительной муфты ("трещотки") в случае, если при подаче в двигатель электрической энергии нормального вращения для приведения ударника во вращение поступающий в двигатель электрический ток увеличился до заданного значения, и с прекращением имитации проскальзывания предохранительной муфты по истечении заданного времени с момента начала имитации проскальзывания предохранительной муфты.
Благодаря такому решению, поскольку имитация проскальзывания предохранительной муфты прекращается по истечении заданного времени с момента ее начала, это позволяет уменьшить потребление энергии и повышение температуры.
Кроме того, в изобретении предлагается ручная машина, содержащая двигатель и вращаемый двигателем выходной вал. Если электрическая энергия, подаваемая в двигатель для вращения выходного вала в направлении нормального вращения, достигла первого значения, может начаться прерывистая подача в двигатель электрической энергии, имеющей второе значение, меньшее первого значения электрической энергии.
Благодаря такому решению вторая электрическая энергия меньше, чем первая электрическая энергия. Таким образом, при подаче второй электрической энергии затяжки/ослабления крепежного элемента практически не происходит. Это позволяет получать крутящий момент с высокой точностью.
В предпочтительном варианте осуществления изобретения подача в двигатель электрической энергии, имеющей второе значение, автоматически прекращается спустя заданное время.
Благодаря такому решению, поскольку двигатель останавливается автоматически, это препятствует излишнему расходованию электрической энергии.
При подаче в двигатель электрической энергии, имеющей второе значение, предпочтительно обеспечить возможность вращения ротора двигателя в направлении нормального вращения и в направлении обратного вращения.
Благодаря такому решению, при вращении ротора двигателя в направлении нормального вращения и в направлении обратного вращения крепежный элемент практически не затягивается и не ослабляется. Поэтому крутящий момент затяжки может быть получен с высокой точностью. Если электрическая энергия, имеющая второе значение, подается только для нормального вращения, крепежный элемент может затягиваться.
Изобретение также позволяет создать ручную машину, которая при достижении заданного крутящего момента обеспечивает четкое восприятие этого события оператором. Кроме того, изобретение также позволяет создать ручную машину, которая, обеспечивая четкость восприятия вышеупомянутого события, препятствует бесполезному расходованию электрической энергии и способствует получению крутящего момента с высокой точностью.
Для достижения этой цели в изобретении предлагается импульсная резьбозавертывающая машина с электронным управлением, содержащая двигатель, приводимый в нормальное и обратное вращения, ударник, вращаемый в направлении нормального или обратного вращения движущей силой, передаваемой ему от двигателя, наковальню, установленную отдельно от ударника и приводимую ударником в нормальное вращение заодно с ним, держатель рабочего инструмента, способный удерживать рабочий инструмент и передавать ему вращение наковальни, устройство электропитания, снабжающее двигатель электрической энергией нормального вращения или обратного вращения, и блок управления, управляющий устройством электропитания таким образом, чтобы подавать в двигатель электрическую энергию обратного вращения, если скорость увеличения электрического тока при увеличении самого электрического тока, поступающего в двигатель при подаче в него электрической энергии нормального вращения, до заданного значения стала больше или равна заданному значению.
Благодаря такому решению при повышении электрического тока, поступающего в двигатель, до заданного значения в двигатель подается электрическая энергия обратного вращения. Таким образом, даже при заворачивании такого крепежного элемента, как болт, когда крутящий момент резко возрастает непосредственно перед достижением заданного крутящего момента затяжки крепежного элемента, изобретение позволяет избежать создания крутящего момента, обусловленного силой инерции, и обеспечивает приложение точно заданного крутящего момента.
Кроме того, в изобретении предлагается ручная машина, содержащая двигатель и вращаемый двигателем выходной вал. Если ток нормального вращения, подаваемый в двигатель для вращения выходного вала в одном направлении, больше или равен заданному значению, в двигатель подается ток обратного вращения для вращения выходного вала в направлении, противоположном указанному выше направлению.
Благодаря такому решению, поскольку при достижении током нормального вращения заданного значения в двигатель подается ток обратного вращения, изобретение позволяет избежать чрезмерной затяжки крепежного элемента, обусловленной инерцией вращения при подаче тока нормального вращения. Таким образом, достигается приложение точно заданного крутящего момента.
Кроме того, в изобретении предлагается ручная машина, содержащая двигатель и вращаемый двигателем выходной вал. Если скорость увеличения электрического тока, подаваемого в двигатель для вращения выходного вала в одном направлении, (увеличение тока в единицу времени) больше или равна заданному значению, в двигатель подается ток обратного вращения для вращения выходного вала в направлении, противоположном указанному выше направлению.
Благодаря такому решению, при достижении скоростью увеличения тока нормального вращения заданного значения в двигатель подается ток обратного вращения, изобретение позволяет избежать чрезмерной затяжки крепежного элемента, обусловленной инерцией вращения при подаче тока нормального вращения. Таким образом, достигается приложение точно заданного крутящего момента.
Изобретение также позволяет создать ручную машину с возможностью выдачи точно заданного крутящего момента.
Для достижения этой цели в изобретении предлагается импульсная резьбозавертывающая машина с электронным управлением, содержащая двигатель, приводимый в нормальное и обратное вращения, ударник, вращаемый в направлении нормального или обратного вращения движущей силой, передаваемой ему от двигателя, наковальню, установленную отдельно от ударника и приводимую во вращение крутящим моментом, прикладываемым к ней ударником при его вращении в направлении нормального вращения, держатель рабочего инструмента, способный удерживать рабочий инструмент и передавать ему вращение наковальни, устройство электропитания, подающее в двигатель электрическую энергию нормального вращения для приведения ударника во вращение или электрическую энергию обратного вращения для сопряжения рабочего инструмента с крепежным элементом, и блок управления, управляющий устройством электропитания, таким образом, с обеспечением подачи в двигатель электрической энергии обратного вращения для сопряжения рабочего инструмента с крепежным элементом таким образом, чтобы до подачи электрической энергии нормального вращения для приведения ударника во вращение поворачивать ударник в направлении обратного вращения с ударом по наковальне.
Благодаря такому решению перед подачей электрической энергии нормального вращения для приведения ударника во вращение ударник поворачивается в направлении обратного вращения и ударяет по наковальне путем подачи электрической энергии обратного вращения для сопряжения рабочего инструмента с крепежным элементом в двигатель. Таким образом, даже если сопряжение между крепежным элементом и рабочим инструментом является недостаточным, крепежный элемент и рабочий инструмент могут плотно подгоняться друг к другу, что позволяет избегать срыва рабочего инструмента с крепежного элемента во время работы.
Кроме того, в изобретении предлагается ручная машина, содержащая двигатель, ударник, приводимый во вращение от двигателя, и наковальню, ударяемую ударником. Наковальня поворачивается в направлении обратного вращения, прежде чем ударник ударит по ней в направлении нормального вращения.
Благодаря такому решению, поворот наковальни в направлении обратного вращения обеспечивает плотность сопряжения наковальни с крепежным элементом. Поэтому случаи повреждения крепежного элемента наковальней редки. Соответственно, это позволяет повысить долговечность крепежного элемента.
Кроме того, в изобретении предлагается ручная машина, содержащая двигатель, ударник, приводимый во вращение от двигателя, и наковальню, ударяемую ударником. Ударник и наковальня входят в контакт друг с другом в направлении обратного вращения, прежде чем ударник ударит по наковальне в направлении нормального вращения.
Благодаря такому решению, поскольку наковальня получает толчок и поворачивается в направлении обратного вращения, это обеспечивает плотность сопряжения наковальни с крепежным элементом. Поэтому случаи повреждения крепежного элемента наковальней редки. Соответственно, это позволяет повысить долговечность крепежного элемента.
В предпочтительном варианте осуществления изобретения наковальней удерживается рабочий инструмент.
Кроме того, в изобретении предлагается ручная машина, содержащая двигатель и приводимый им во вращение держатель рабочего инструмента. Держатель рабочего инструмента выполнен таким образом, чтобы до его поворота в направлении нормального вращения поворачиваться в направлении обратного вращения.
Изобретение также позволяет создать ручную машину, препятствующую срыву рабочего инструмента с крепежного элемента.
Для достижения этой цели в изобретении предлагается импульсная резьбозавертывающая машина с электронным управлением, содержащая приводимый во вращение двигатель, переключающие элементы для питания двигателя энергией, редуктор, подключенный к двигателю для изменения скорости вращения, снимаемого с ротора двигателя, ударник, вращаемый движущей силой, прикладываемой к нему посредством редуктора от двигателя, наковальню, установленную отдельно от ударника и приводимую во вращение крутящим моментом, прикладываемым к ней ударником при его вращении, держатель рабочего инструмента, способный удерживать рабочий инструмент и передавать ему вращение наковальни, устройство электропитания, подающее в двигатель электрическую энергию привода, блок управления, управляющий устройством электропитания таким образом, чтобы изменять величину электрической энергии привода в случае увеличения электрического тока, поступающего в двигатель при подаче электрической энергии привода, до заданного порогового значения, датчик температуры, регистрирующий температуру переключающих элементов, и средство изменения порогового значения, изменяющее пороговое значение на основании температуры переключающих элементов.
Благодаря такому решению, путем изменения порогового значения с учетом изменения температуры в соответствующей ситуации можно изменять режим нанесения ударов.
Кроме того, в изобретении предлагается ручная машина, содержащая двигатель, выходное звено, приводимое в движение от двигателя, и корпус, вмещающий в себя двигатель. Ручная машина снабжена датчиком температуры, способным определять температуру расположенного в корпусе объекта, а способ управления двигателем может изменяться в соответствии со значением сигнала на выходе датчика температуры.
Благодаря такому решению можно избегать чрезмерного выделения тепла расположенным в корпусе объектом. Поэтому случаи выхода из строя или повреждения расположенного в корпусе объекта из-за перегрева редки.
Кроме того, в изобретении предлагается ручная машина, содержащая узел электропривода, выходное звено, приводимое в движение от двигателя, и корпус, вмещающий в себя двигатель. Ручная машина снабжена датчиком температуры, способным определять температуру узла электропривода, а способ управления узлом электропривода может изменяться в соответствии со значением сигнала на выходе датчика температуры.
Благодаря такому решению можно избегать чрезмерного выделения тепла узлом электропривода. Поэтому случаи выхода из строя или повреждения узла электропривода из-за перегрева редки.
В предпочтительном варианте осуществления изобретения узел электропривода имеет монтажную плату, на которой расположены переключающие элементы и преобразователи температуры.
Благодаря такому решению регистрации температуры переключающих элементов, подверженных воздействию выделяемого тепла в особенной степени, посредством монтажной платы, можно осуществлять управление таким образом, чтобы препятствовать выделению тепла переключающими элементами. Поэтому вероятность выхода из строя переключающих элементов практически отсутствует.
Изобретение также позволяет создать ручную машину с возможностью изменения способа управления двигателем в соответствии с температурой расположенного в корпусе объекта.
Для достижения этой цели в изобретении предлагается импульсная резьбозавертывающая машина с электронным управлением, содержащая двигатель, приводимый в нормальное и обратное вращения, ударник, вращаемый в направлении нормального или обратного вращения движущей силой, передаваемой ему от двигателя, наковальню, установленную отдельно от ударника с возможностью удара по ней ударника и ее поворота в направлении нормального вращения за счет вращения ударника, получившего путь ускорения путем его поворота в направлении обратного вращения, держатель рабочего инструмента, способный удерживать рабочий инструмент и передавать ему вращение наковальни, устройство электропитания, осуществляющее переключение между подачей в двигатель электрической энергии нормального вращения и электрической энергии обратного вращения по первому циклу, и блок управления, управляющий устройством электропитания таким образом, что переключение между подачей электрической энергии нормального вращения и электрической энергии обратного вращения осуществляется по второму циклу, более короткому, чем первый цикл, если скорость увеличения электрического тока при повышении самого электрического тока, поступающего в двигатель при подаче в него электрической энергии нормального вращения и электрической энергии обратного вращения, до заданного значения стала больше или равна заданному значению.
Благодаря такому решению, если скорость увеличения электрического тока при повышении самого электрического тока, поступающего в двигатель, до заданного значения стала больше или равна заданному значению, шуруп или саморез (резьбовой крепежный элемент для заворачивания в дерево или подобные материалы) считается завернутым, и переключение подачи электрической энергии нормального вращения и электрической энергии обратного вращения переходит на короткий цикл. Таким образом, можно уменьшить возникающую впоследствии силу реакции со стороны заворачиваемого элемента.
Кроме того, в изобретении предлагается ручная машина, содержащая двигатель, ударник, приводимый во вращение от двигателя, и наковальню, ударяемую ударником. Если электрический ток, поступающий в двигатель, меньше или равен заданному значению, ударник наносит удары по наковальне с первым интервалом, а если подаваемый в двигатель электрический ток больше или равен заданному значению, ударник наносит удары по наковальне со вторым интервалом, меньшим первого интервала.
Благодаря такому решению, если электрический ток больше или равен заданному значению, крутящий момент также больше или равен заданному значению, а если крутящий момент больше или равен заданному значению, интервал нанесения ударов сокращается. Поэтому поскольку при увеличении крутящего момента частота нанесения ударов повышается, производительность труда оператора увеличивается. Если бы удары по наковальне не наносились со вторым интервалом, сила реакции (противодействия заворачиванию) была бы большой. Соответственно, вращение крепежного элемента начало бы замедляться и его скорость стала бы низкой. Это привело бы к уменьшению производительности труда оператора.
Кроме того, в изобретении предлагается ручная машина, содержащая двигатель, ударник, приводимый во вращение от двигателя, и наковальню, ударяемую ударником. Если электрический ток, поступающий в двигатель, меньше или равен заданному значению, ударник наносит удары по наковальне с первым интервалом, а если подаваемый в двигатель электрический ток больше или равен заданному значению, ударник наносит удары по наковальне со вторым интервалом, меньшим первого интервала.
Кроме того, в другом аспекте изобретения в изобретении предлагается ручная машина, содержащая двигатель и выходной вал, приводимый во вращение от двигателя. При этом завершение заворачивания определяется по электрическому току, проходящему в двигателе.
Изобретение также позволяет создать ручную машину, обеспечивающую уменьшение силы реакции со стороны заворачиваемого элемента.
Для достижения этой цели в изобретении предлагается, согласно пункту 10 его формулы, импульсная резьбозавертывающая машина с электронным управлением, содержащая двигатель, приводимый в нормальное и обратное вращения, ударник, вращаемый в направлении нормального или обратного вращения движущей силой, передаваемой ему от двигателя, наковальню, установленную отдельно от ударника и вращаемую крутящим моментом, прикладываемым к ней при вращении ударника в направлении нормального вращения, держатель рабочего инструмента, способный удерживать рабочий инструмент и передавать ему вращение наковальни, устройство электропитания, снабжающее двигатель электрической энергией нормального вращения или обратного вращения, и блок управления, управляющий устройством электропитания таким образом, что в течение заданного периода времени в двигатель подается электрическая энергия нормального вращения для вращения наковальни заодно с ударником, а по истечении заданного периода времени в двигатель подается электрическая энергия обратного вращения, а также управляющий устройством электропитания таким образом, что переключение между подачей электрической энергии нормального вращения и электрической энергии обратного вращения осуществляется по первому циклу переключения, если электрический ток, поступающий в двигатель при подаче электрической энергии обратного вращения, больше или равен первому заданному значению, и по второму циклу переключения, если указанный электрический ток, поступающий в двигатель при подаче электрической энергии обратного вращения, меньше первого заданного значения.
Благодаря такому решению цикл переключения электрической энергии нормального вращения и электрической энергии обратного вращения изменяется в соответствии с электрическим током, поступающим в двигатель при подаче электрической энергии обратного вращения. Например, если поступающий в двигатель электрический ток велик, может быть определено, что крепежный элемент может быть идентифицирован как шуруп или саморез, а если электрический ток мал, крепежный элемент может быть идентифицирован как болт. Таким образом, переключение между подачей электрической энергии нормального вращения и электрической энергии обратного вращения может осуществляться по циклу, подходящему для каждого конкретного крепежного элемента, и процесс заворачивания может выполняться соответствующим образом согласно типу крепежного элемента.
Дополнительно, согласно пункту 9 формулы настоящего изобретения предлагается ручная машина, содержащая двигатель и выходной вал, приводимый во вращение от двигателя в направлении нормального вращения. В предлагаемой ручной машине способ управления двигателем автоматически меняется в соответствии со значением тока, проходящего при выдаче сигнала на реверсирование двигателя.
Благодаря такому решению, поскольку крепежный элемент, вращаемый выходным валом, может быть идентифицирован в соответствии со значением тока, когда выходной вал вращается в направлении обратного вращения, необходимо лишь регистрировать выходное значение тока. Соответственно, поскольку регистрировать другие параметры не требуется, это позволяет получить недорогую электрическую ручную машину.
Изобретение также позволяет создать ручную машину, обеспечивающую возможность определения типа крепежного элемента.
Для достижения этой цели в изобретении предлагается, согласно пункту 11 его формулы, импульсная резьбозавертывающая машина с электронным управлением, содержащая двигатель, приводимый в нормальное и обратное вращения, ударник, вращаемый в направлении нормального или обратного вращения движущей силой, передаваемой ему от двигателя, наковальню, установленную отдельно от ударника с возможностью удара по ней ударника и ее поворота в направлении нормального вращения за счет вращения ударника, получившего путь ускорения путем его поворота в направлении обратного вращения, держатель рабочего инструмента, способный удерживать рабочий инструмент и передавать ему вращение наковальни, устройство электропитания, попеременно включающее подачу в двигатель электрической энергии нормального вращения и электрической энергии обратного вращения по первому циклу, датчик температуры, регистрирующий температуру двигателя, и блок управления, управляющий устройством электропитания таким образом, что при повышении температуры двигателя до заданного значения переключение между подачей электрической энергии нормального вращения и электрической энергии обратного вращения осуществляется по второму циклу, более длительному, чем первый цикл.
Благодаря такому решению переключение между подачей электрической энергии нормального вращения и электрической энергии обратного вращения осуществляется по второму циклу, более длительному, чем первый цикл, при повышении температуры двигателя до заданного значения. Таким образом, можно уменьшить выделение тепла во время такого переключения и повысить долговечность импульсной резьбозавертывающей машины в целом.
Кроме того, в изобретении предлагается ручная машина, содержащая двигатель, выходное звено, приводимое в движение от двигателя, корпус, вмещающий в себя двигатель, и датчик температуры, способный регистрировать температуру расположенного в корпусе объекта. Способ управления двигателем меняется в соответствии со значением сигнала на выходе датчика температуры.
Благодаря такому решению, поскольку значение подаваемой в двигатель электрической энергии может изменяться в соответствии с температурой расположенного в корпусе объекта, изобретение позволяет предотвратить повышение температуры расположенного в корпусе объекта до слишком высоких значений. Это предохраняет расположенный в корпусе объект от повреждений, связанных с высокой температурой.
Кроме того, в изобретении предлагается ручная машина, содержащая узел электропривода, выходное звено, приводимое в движение от двигателя, корпус, вмещающий в себя узел электропривода, и датчик температуры, способный регистрировать температуру узла электропривода. Значение электрической энергии, подаваемой в узел электропривода, меняется в соответствии со значением сигнала на выходе датчика температуры.
Благодаря такому решению, поскольку значение электрической энергии, подаваемой в двигатель, может изменяться в соответствии с температурой узла электропривода, изобретение позволяет предотвратить повышение температуры узла электропривода до слишком высоких значений. Это предохраняет узел электропривода от повреждений, связанных с высокой температурой.
В предпочтительном варианте осуществления изобретения ударник соединен с узлом электропривода, а наковальня установлена с возможностью нанесения по ней ударов ударником, причем если сигнал на выходе датчика температуры имеет первое значение, то ударник наносит удары по наковальне с первым интервалом, а если сигнал на выходе датчика температуры имеет второе значение, большее первого значения, то ударник наносит удары по наковальне со вторым интервалом, большим первого интервала.
Благодаря такому решению при высокой температуре нагрузка уменьшается. Таким образом, если температура узла электропривода высока, повышение температуры узла электропривода не допускается. Поэтому случаи повреждения узла электропривода при чрезмерном повышении температуры узла электропривода редки.
Кроме того, в другом аспекте изобретения предлагается ручная машина, содержащая двигатель, приводимый в действие в прерывистом режиме, выходное звено, приводимое в движение от двигателя, корпус, вмещающий в себя двигатель, и датчик температуры, способный регистрировать температуру расположенного в корпусе объекта. Цикл прерывистого приведения двигателя в действие изменяется в соответствии со значением сигнала на выходе датчика температуры.
Изобретение также позволяет создать ручную машину, обеспечивающую возможность управления двигателем в соответствии с температурой расположенного в корпусе объекта.
Для достижения этой цели в изобретении предлагается, согласно пункту 12 его формулы, импульсная резьбозавертывающая машина с электронным управлением, содержащая двигатель, приводимый в нормальное и обратное вращения, ударник, вращаемый в направлении нормального или обратного вращения движущей силой, передаваемой ему от двигателя, наковальню, установленную с возможностью удара по ней ударника и ее поворота в направлении нормального вращения за счет вращения ударника, получившего путь ускорения путем его поворота в направлении обратного вращения, держатель рабочего инструмента, способный удерживать рабочий инструмент и передавать ему вращение наковальни, устройство электропитания, попеременно включающее подачу в двигатель электрической энергии нормального вращения и электрической энергии обратного вращения, и блок управления, управляющий устройством электропитания таким образом, что с увеличением поступающего в двигатель электрического тока увеличивается отношение периода времени, в течение которого подается электрическая энергия обратного вращения, к периоду времени, в течение которого подается электрическая энергия нормального вращения.
Благодаря такому решению, отношение периода обратного вращения к периоду нормального вращения возрастает с увеличением поступающего в двигатель электрического тока. Таким образом, можно уменьшить силу противодействия со стороны заворачиваемого элемента и создать удобную в использовании импульсно-силовую ручную машину.
В соответствии с пунктом 13 формулы настоящего изобретения предпочтителен вариант, в котором на первой стадии, когда поступающий в двигатель электрический ток увеличивается до заданного значения, блок управления управляет устройством электропитания в первом режиме, в котором период нормального вращения, в течение которого подается электрическая энергия нормального вращения, уменьшается, а на второй стадии, когда поступающий в двигатель электрический ток превысил заданное значение, блок управления управляет устройством электропитания во втором режиме, в котором период обратного вращения, в течение которого подается электрическая энергия обратного вращения, увеличивается.
Благодаря такому решению, если поступающий в двигатель электрический ток меньше или равен заданному значению, заворачивание выполняется в первом режиме, в котором преимущественно используется усилие нажима, а если электрический ток больше заданного значения, заворачивание выполняется во втором режиме, в котором преимущественно используется сила ударов. Таким образом, затягивание может выполняться в режиме, наиболее подходящем для крепежного элемента.
В соответствии с пунктом 14 формулы настоящего изобретения предпочтителен вариант, в котором блок управления на второй стадии способен выбирать один из нескольких вторых режимов с различными отношениями периодов подачи электрической энергии обратного и нормального вращений.
Благодаря такому решению даже при резком увеличении электрического тока, поступающего в двигатель, затягивание может выполняться в подходящем ударном режиме.
В соответствии с пунктом 15 формулы настоящего изобретения предпочтителен вариант, в котором среди нескольких вторых режимов с различными отношениями периодов подачи электрической энергии обратного и нормального вращений блок управления на второй стадии разрешает только переключение во второй режим с долгим периодом обратного вращения из второго режима с коротким периодом обратного вращения.
Такое решение позволяет исключить резкое изменение тактильного ощущения реакции машины.
В соответствии с пунктом 16 формулы настоящего изобретения предпочтителен вариант, в котором среди нескольких вторых режимов с различными отношениями периодов подачи электрической энергии обратного и нормального вращений блок управления на второй стадии разрешает только переключение во второй режим, соседний по длительности, периода обратного вращения.
Такое решение также позволяет исключить резкое изменение тактильного ощущения реакции машины.
Кроме того, в изобретении предлагается, согласно пункту 17 его формулы, ручная машина, содержащая двигатель, приводимый в действие в прерывистом режиме, ударник, приводимый в движение двигателем, и наковальню, ударяемую ударником. При этом время, в течение которого ударник приводится в нормальное вращение, постепенно уменьшается.
Благодаря такому решению, поскольку время, в течение которого ударник приводится в нормальное вращение, постепенно уменьшается, интервал нанесения ударником ударов может уменьшаться в соответствии с нагрузкой, которая постепенно возрастает. Поэтому сила реакции, ощущаемая оператором, уменьшается, и изобретение позволяет получить ручную машину, которая практически не срывается с головки крепежного элемента и обеспечивает высокую производительность.
Кроме того, в изобретении предлагается, согласно пункту 18 его формулы, ручная машина, содержащая двигатель, приводимый в действие в прерывистом режиме, ударник, приводимый в движение двигателем, и наковальню, ударяемую ударником. При этом время, в течение которого ударник приводится в обратное вращение, постепенно увеличивается.
Благодаря такому решению, поскольку время, в течение которого ударник приводится в обратное вращение, постепенно увеличивается, угловое расстояние, проходимое ударником в результате его обратного вращения, может увеличиваться в соответствии с углом поворота наковальни под действием ударов ударника, уменьшающимся соответственно постепенному увеличению нагрузки. Этим увеличивается интервал ускорения ударника. Соответственно, ударник будет надежно получать достаточное ускорение для удара по наковальне, и наковальня будет эффективно работать в ударном режиме. Это позволяет получить ручную машину с высокой производительностью.
Кроме того, в изобретении предлагается, согласно пункту 19 его формулы, ручная машина, содержащая двигатель, приводимый в действие в прерывистом режиме, ударник, приводимый в движение двигателем, наковальню, ударяемую ударником, и регистрирующее средство, способное регистрировать значение электрического тока, поступающего в двигатель. При этом для поступающего в двигатель тока задано первое значение, второе значение, превышающее первое значение, и третье значение, превышающее второе значение. Управление двигателем может осуществляться в первом режиме по первому значению тока, во втором режиме по второму значению тока и в третьем режиме по третьему значению тока. Если регистрирующее средство двигателя зарегистрировало первое значение тока, а непосредственно после регистрации первого значения тока - третье значение тока, то после управления в первом режиме управление осуществляется во втором режиме.
Благодаря такому решению, даже при резком изменении значения тока (например, даже если ток изменился с первого до третьего значения), резкой смены режимов не происходит (режим меняется с первого на второй, не перескакивая на третий). Таким образом, у оператора не будет возникать ощущения дискомфорта в связи со сменой режима. Это позволяет получить ручную машину, удобную в работе.
Кроме того, в изобретении предлагается, согласно пункту 20 его формулы, ручная машина, содержащая двигатель, приводимый в действие в прерывистом режиме, ударник, приводимый в движение двигателем, наковальню, ударяемую ударником, и регистрирующее средство, способное регистрировать значение электрического тока, поступающего в двигатель. При этом для поступающего в двигатель тока задано первое значение и второе значение, превышающее первое значение. Управление двигателем осуществляется в первом режиме по первому значению тока и во втором режиме по второму значению тока. После управления в первом режиме управление осуществляется не в первом режиме, а во втором режиме.
Благодаря такому решению, даже если во время заворачивания резьбового крепежного элемента происходит уменьшение нагрузки, схема подачи напряжения, т.е. форма сигнала напряжения, не меняется на режим легкой нагрузки. Таким образом, двигатель постепенно переводится на режим тяжелой нагрузки. Поэтому режимы легкой нагрузки и тяжелой нагрузки не повторяются. Это позволяет получить ручную машину, дающую оператору ощущение удобства работы.
В соответствии с пунктом 21 формулы настоящего изобретения, в предпочтительном варианте его осуществления для поступающего в двигатель тока задано третье значение, превышающее второе значение тока, причем управление двигателем осуществляется в третьем режиме по третьему значению тока, а после управления во втором режиме управление осуществляется во втором режиме или в третьем режиме.
Кроме того, в изобретении предлагается, согласно пункту 22 его формулы, ручная машина, содержащая двигатель, приводимый в действие в прерывистом режиме, ударник, приводимый в движение двигателем, наковальню, ударяемую ударником, и регистрирующее средство, способное регистрировать значение электрического тока, поступающего в двигатель. При этом для поступающего в двигатель тока задано первое значение, второе значение, превышающее первое значение, и третье значение, превышающее второе значение. Управление двигателем осуществляется в первом режиме по первому значению тока, во втором режиме по второму значению тока и в третьем режиме по третьему значению тока. Управление в третьем режиме осуществляется после первого режима, если зарегистрировано первое значение тока и зарегистрировано третье значение тока.
Благодаря такому решению, если обнаружено увеличение значения тока и нагрузки, работа может выполняться по нагрузке путем перехода в режим, соответствующий нагрузке. Это позволяет получить ручную машину с высокой эффективностью работы.
Кроме того, в другом аспекте изобретения предлагается, согласно пункту 23 формулы изобретения, ручная машина, содержащая двигатель, приводимый в действие в прерывистом режиме, ударник, приводимый в движение двигателем, и наковальню, ударяемую ударником. При этом способ управления двигателем может автоматически меняться.
В соответствии с пунктом 24 формулы настоящего изобретения в предпочтительном варианте его осуществления способ управления двигателем автоматически меняется в соответствии с нагрузкой на двигатель.
В соответствии с пунктом 25 формулы настоящего изобретения в предпочтительном варианте его осуществления нагрузка на двигатель представлена электрическим током, создаваемым в двигателе.
В соответствии с пунктом 26 формулы настоящего изобретения в предпочтительном варианте его осуществления способ управления двигателем автоматически меняется в соответствии с количеством времени.
Изобретение также позволяет создать ручную машину, поведение которой во время работы хорошо ощущается оператором.
Краткое описание чертежей
Указанные выше и другие цели изобретения и его новые особенности выявляются ниже в подробном описании осуществления изобретения, поясняемом чертежами, на которых показано:
на фиг.1 - продольный разрез импульсно-силовой ручной машины 1, относящейся к одному варианту осуществления изобретения,
на фиг.2 - внешний вид импульсно-силовой ручной машины 1 в указанном варианте осуществления изобретения,
на фиг.3 - вид в увеличенном масштабе показанного на фиг.1 ударного механизма 40 и его окружения,
на фиг.4 - вид вентилятора 18 охлаждения, показанного на фиг.1,
на фиг.5 - функциональная схема системы управления двигателем импульсно-силовой ручной машины, относящейся к указанному выше варианту осуществления изобретения,
на фиг.6 - ударник 151 и наковальня 156, относящиеся к базовой конструкции (второй вариант осуществления изобретения),
на фиг.7 - шесть стадий работы ударного механизма, содержащего ударник 151 и наковальню 156, показанные на фиг.6,
на фиг.8 - ударник 41 и наковальня 46, показанные на фиг.1,
на фиг.9 - ударник 41 и наковальня 46, показанные на фиг.1 и изображенные в других ракурсах,
на фиг.10 - работа ударного механизма, содержащего ударник 41 и наковальню 46, показанные на фиг.8 и 9,
на фиг.11 - графики, показывающие характер изменения пускового сигнала во время работы импульсно-силовой ручной машиной 1, управляющего сигнала на выходе инверторной схемы, скорости вращения ротора двигателя 3 и силы удара ударника 41 по наковальне 46,
на фиг.12 - алгоритм управления двигателем 3, относящийся к указанному выше варианту осуществления изобретения,
на фиг.13 - графики, показывающие изменения во времени подаваемого в двигатель тока и частоты вращения ротора двигателя в импульсном режиме (1) и импульсном режиме (2),
на фиг.14 - алгоритм управления двигателем в импульсном режиме (1), относящийся к указанному выше варианту осуществления изобретения,
на фиг.15 - графики, иллюстрирующие зависимость от времени частоты вращения ротора двигателя 3 и значения подаваемого в двигатель 3 тока,
на фиг.16 - алгоритм управления двигателем в импульсном режиме (2), относящийся к указанному выше варианту осуществления изобретения,
на фиг.17 - продольный разрез импульсной резьбозавертывающей машины с электронным управлением, относящейся к третьему варианту осуществления изобретения,
на фиг.18 - блок-схема управления импульсной резьбозавертывающей машиной с электронным управлением, относящейся к третьему варианту осуществления изобретения,
на фиг.19 - процесс ударного взаимодействия ударника и наковальни импульсной резьбозавертывающей машины с электронным управлением, относящейся к третьему варианту осуществления изобретения,
на фиг.20 - процесс управления двигателем импульсной резьбозавертывающей машины с электронным управлением, относящейся к третьему варианту осуществления изобретения, в режиме сверления,
на фиг.21 - процесс управления двигателем импульсной резьбозавертывающей машины с электронным управлением, относящейся к третьему варианту осуществления изобретения, при заворачивании болта в режиме электронной предохранительной муфты,
на фиг.22 - процесс управления двигателем импульсной резьбозавертывающей машины с электронным управлением, относящейся к третьему варианту осуществления изобретения, при заворачивании шурупа или самореза в режиме электронной предохранительной муфты,
на фиг.23 - процесс управления двигателем импульсной резьбозавертывающей машины с электронным управлением, относящейся к третьему варианту осуществления изобретения, при заворачивании болта в импульсном режиме,
на фиг.24 - процесс управления двигателем импульсной резьбозавертывающей машины с электронным управлением, относящейся к третьему варианту осуществления изобретения, при заворачивании шурупа или самореза в импульсном режиме без переключения во второй импульсный режим,
на фиг.25 - процесс управления двигателем импульсной резьбозавертывающей машины с электронным управлением, относящейся к третьему варианту осуществления изобретения, при заворачивании шурупа или самореза в импульсном режиме с переключением во второй импульсный режим,
на фиг.26 - блок-схема алгоритма управления двигателем импульсной резьбозавертывающей машины с электронным управлением, относящейся к третьему варианту осуществления изобретения, при заворачивании крепежного элемента в режиме электронной предохранительной муфты,
на фиг.27 - блок-схема алгоритма управления двигателем импульсной резьбозавертывающей машины с электронным управлением, относящейся к третьему варианту осуществления изобретения, при заворачивании крепежного элемента в импульсном режиме,
на фиг.28 - изменение порогового значения во время заворачивания шурупа или самореза при работе импульсной резьбозавертывающей машины с электронным управлением, относящейся к четвертому варианту осуществления изобретения, в режиме электронной предохранительной муфты,
на фиг.29 - изменение порогового значения во время заворачивания шурупа или самореза при работе импульсной резьбозавертывающей машины с электронным управлением, относящейся к четвертому варианту осуществления изобретения, в импульсном режиме,
на фиг.30 - изменение цикла включения нормального вращения и обратного вращения во время заворачивания шурупа или самореза при работе импульсной резьбозавертывающей машины с электронным управлением, относящейся к пятому варианту осуществления изобретения, в импульсном режиме,
на фиг.31 - блок-схема модифицированного алгоритма управления двигателем импульсной резьбозавертывающей машины с электронным управлением, относящейся к указанному варианту осуществления изобретения,
на фиг.32 - продольный разрез импульсной резьбозавертывающей машины с электронным управлением, относящейся к шестому варианту осуществления изобретения,
на фиг.33 - положения ударника и наковальни импульсной резьбозавертывающей машины с электронным управлением, относящейся к шестому варианту осуществления изобретения, в процессе их взаимодействия,
на фиг.34 - блок-схема алгоритма управления двигателем импульсной резьбозавертывающей машины с электронным управлением, относящейся к шестому варианту осуществления изобретения, при выворачивании шурупа или самореза в импульсном режиме.
Описание вариантов осуществления изобретения
Ниже со ссылками на чертежи рассматриваются варианты осуществления изобретения. В приведенном ниже описании вертикальное направление ("вверх-вниз"), продольное направление ("вперед-назад") и поперечное направление ("вправо-влево") соответствуют направлениям, показанным на фиг.1 и 2.
На фиг.1 показана импульсно-силовая, в частности импульсная резьбозавертывающая, ручная машина 1 в одном варианте осуществления изобретения. В изображенной импульсно-силовой ручной машине 1 ударный механизм 40 приводится в движение посредством заряжаемой аккумуляторной батареи 30 как источника электрической энергии и двигателя 3 как источника механической мощности и сообщает вращение и удары наковальне 46 как выходному валу для непрерывной передачи крутящего момента или передачи энергии периодических ударов на рабочий инструмент (на чертеже не показан), такой как насадка (бита, головка) шуруповерта или гайковерта, с обеспечением выполнения операции, такой как сборка резьбового соединения путем заворачивания шурупа, болта или гайки.
Двигатель 3 представляет собой бесщеточный электрический двигатель постоянного тока и расположен в трубчатой основной части 6а корпуса 6, 5, имеющего в боковой проекции в целом Т-образную форму. Корпус 6 разделен на два практически симметричных элемента: правый и левый, которые соединяются несколькими винтами. Например, один из правого и левого элементов корпуса 6 (в рассматриваемом варианте осуществления изобретения - левый элемент) выполнен с несколькими приливами 20 под винты, а другой (в рассматриваемом варианте осуществления изобретения - правый) выполнен с несколькими отверстиями под винты (на чертеже не показаны). В основной (горизонтально ориентированной) части 6а корпуса расположен вал 19 двигателя 3, установленный с возможностью вращения в подшипниках 17b на заднем конце и в подшипниках 17а, поддерживающих вал в его средней части. У задней стороны двигателя 3 расположена плата, на которой смонтировано шесть переключающих элементов 10, и двигатель 3 приводится во вращение посредством инверторного управления этими переключающими элементами 10. Для определения углового положения ротора 3а на передней стороне платы 7 смонтирован датчик 58 углового положения, такой как датчик Холла или интегральная схема Холла (магнитоуправляемая интегральная схема).
Корпус 6 имеет рукояточную часть 6b, проходящую почти перпендикулярно основной части 6а корпуса и выполненную за одно целое с ней. Вверху рукояточной части 6b корпуса предусмотрен пусковой выключатель 8 и переключатель 14 направления вращения (нормальное/обратное вращение). Клавиша (гашетка или курок) 8а пускового выключателя 8 поджата пружиной (на чертеже не показанной) таким образом, чтобы выступать из рукояточной части 6b корпуса. Внизу рукояточной части 6b размещена плата 9 управления для управления скоростью двигателя 3 (частотой вращения его ротора) посредством клавиши 8а пускового выключателя. Внизу рукояточной части 6b находится держатель 6с аккумуляторной батареи, на котором съемным образом установлена аккумуляторная батарея 30 с несколькими никель-водородными или литий-ионными гальваническими элементами.
Спереди двигателя 3 на его валу 19 установлен вентилятор 18 охлаждения, вращающийся синхронно с валом. Вентилятор 18 охлаждения всасывает воздух через впускные отверстия 26а и 26b, предусмотренные сзади основной части 6а корпуса. Всасываемый воздух выбрасывается из корпуса 6 наружу через несколько щелей 26с (см. фиг.2), выполненных в основной части 6а корпуса вдоль периферии вентилятора 18 охлаждения радиально снаружи от него.
Ударный механизм 40 включает в себя наковальню 46 и ударник 41. Ударник 41 установлен таким образом, чтобы соединять оси нескольких сателлитов планетарного редуктора 21. В отличие от конструкции обычного ударного механизма, широко используемого в настоящее время, ударник 41 не имеет кулачкового механизма, включающего в себя шпиндель, пружину, криволинейную канавку, шарики и т.д. Наковальня 46 и ударник 41 соединены между собой посредством соединительной оси 41а и соединительной выемки 46f, выполненных вокруг их центров вращения таким образом, чтобы их относительное вращение было возможно лишь менее чем на один оборот. На переднем конце наковальни 46 за одно целое с ней выполнен участок выходного вала для установки рабочего инструмента (на чертеже не показан) с гнездом 46а, имеющим в поперечном сечении, глядя в осевом направлении, шестиугольную форму. Задняя сторона наковальни 46 сопряжена с соединительной осью 41а ударника 41 и зафиксирована вокруг осевого центра металлическим подшипником 16а с возможностью вращения относительно картера 5. Подробно форма наковальни 46 и ударника 41 описывается ниже.
Картер 5 выполнен цельным и металлическим, предназначен для размещения ударного механизма 40 и планетарного редуктора 21 и установлен на передней стороне корпуса 6. Наружная периферийная сторона картера 5 снабжена покрытием 11 из полимерного материала для уменьшения теплопередачи, поглощения ударов и т.д. На конце наковальни 46 расположены втулка 15 и шарики 24 для съемного крепления рабочего инструмента. Втулка 15 охватывает пружину 15а, шайбу 15b и стопорное кольцо 15с.
При нажатии на клавишу 8а и пуске двигателя 3 скорость вращения ротора двигателя 3 понижается планетарным редуктором 21, и ударник 41 вращается с частотой вращения, уменьшенной по отношению к частоте вращения ротора двигателя 3 соответственно передаточному числу редуктора. При вращении ударника 41 крутящий момент с него передается наковальне 46, и наковальня 46 начинает вращаться с той же скоростью, что и ударник 41. Когда сила, приложенная к наковальне 46, становится большой за счет силы реакции (т.е. противодействия, или сопротивления, заворачиванию), воспринимаемой от рабочего инструмента, блок управления определяет нарастание силы реакции и приводит ударник 41 в движение непрерывно или прерывисто, изменяя режим привода ударника 41, прежде чем двигатель 3 успеет остановиться.
На фиг.2 показан внешний вид импульсно-силовой ручной машины 1, изображенной на фиг.1. Корпус 6 имеет три части 6а, 6b и 6с, причем в основной части 6а корпуса вдоль периферии вентилятора 18 охлаждения радиально снаружи от него выполнены щели 26с для выпуска охлаждающего воздуха. На верхней лицевой стороне держателя 6 с аккумуляторной батареи предусмотрена панель 31 управления. На панели 31 управления расположены кнопки управления различными операциями, сигнальные лампы и т.д.; например, на панели 31 управления расположены выключатель для включения/выключения светодиодного источника света 12 и кнопка для проверки остаточного количества заряда аккумуляторной батареи. На боковой стороне держателя 6с аккумуляторной батареи предусмотрен переключатель (тумблер) 32, предназначенный, например, для переключения режима привода (режим сверления и ударный режим) двигателя 3. Нажатие на переключатель 32 обеспечивает попеременное включение режима сверления и ударного режима.
Аккумуляторная батарея 30 имеет кнопки 30А расфиксации, расположенные на ней с правой и левой сторон и позволяющие отсоединять аккумуляторную батарею 30 от ее держателя 6с, сдвигая аккумуляторную батарею 30 вперед при одновременном нажатии на кнопки 30А расфиксации. На правой или на левой стороне держателя 6с аккумуляторной батареи съемным образом закреплена металлическая скоба 33 для крепления ручной машины на поясе оператора. Хотя на фиг.2 скоба 33 для крепления на поясе оператора изображена установленной с левой стороны импульсно-силовой ручной машины 1, ее можно снять оттуда и закрепить с правой стороны. Через задний конец держателя 6с аккумуляторной батареи пропущен и закреплен петлей ремешок 34.
На фиг.3 приведен местный вид в увеличенном масштабе показанного на фиг.1 ударного механизма 40 и его окружения. Редуктор 21 выполнен в виде планетарного редуктора. К концу вала 19 двигателя 3 присоединено солнечное зубчатое колесо 21а, действующее таким образом в качестве ведущего (входного) звена планетарного механизма, а внутри кольцевого зубчатого колеса 21d, зафиксированного на основной части 6а корпуса, вращаются несколько сателлитов 21b. Оси 21с сателлитов 21b неподвижно связаны между собой ударником 41, действующим в качестве водила. Ударник 41, являясь ведомым (выходным) звеном планетарного редуктора 21, вращается в том же направлении, что и вал двигателя 3, с понижением скорости относительно вала двигателя соответственно установленному передаточному числу редуктора. Это передаточное число редуктора задается исходя из таких факторов, как тип заворачиваемого крепежного элемента (шуруп/саморез или болт), выходная мощность двигателя 3 и требуемый крутящий момент затяжки. В рассматриваемом варианте осуществления изобретения передаточное число редуктора задано с таким расчетом, чтобы частота вращения ударника 41 составляла примерно от 1/8 до 1/15 частоты вращения ротора двигателя 3.
Внутри основной части 6а корпуса с внутренней периферийной стороны двух приливов 20 под винты предусмотрен внутренний корпус 22. Внутренний корпус 22 изготовлен цельным, путем формования из синтетической смолы, такой как пластмасса. С задней стороны внутреннего корпуса выполнена цилиндрическая часть, удерживающая подшипник 17а, в котором с возможностью вращения установлен вал 19 двигателя 3. С передней стороны внутреннего корпуса 22А предусмотрена ступенчатая цилиндрическая часть, имеющая два различных диаметра. На участке меньшего диаметра расположен шариковый подшипник 16b, а на участке большего диаметра в ступенчатую цилиндрическую часть вставлена спереди часть кольцевого зубчатого колеса 21d. Поскольку кольцевое зубчатое колесо 21d установлено на внутреннем корпусе 22 с фиксацией от проворачивания, а внутренний корпус 22 сам прикреплен к основной части 6а корпуса 6 с фиксацией от проворачивания относительно него, кольцевое зубчатое колесо 21d зафиксировано в окружном направлении. Наружная периферийная часть кольцевого зубчатого колеса 21d имеет выступ, в основном определяющий наружный диаметр, и между этим выступом и внутренним корпусом 22 установлено уплотнительное кольцо 23 круглого сечения. На вращающиеся части ударника 41 и наковальни 46 нанесена смазка (на чертеже не показана), а уплотнительное кольцо 23 круглого сечения обеспечивает уплотнение зазора, чтобы смазка не просачивалась в сторону внутреннего корпуса 22.
В рассматриваемом варианте осуществления изобретения ударник 41 действует в качестве водила, удерживающего оси 21с сателлитов 21b. Таким образом, задний конец ударника 41 проходит до внутренней периферийной стороны подшипника 16b. Задняя внутренняя периферийная часть ударника 41 расположена в цилиндрическом внутреннем пространстве, вмещающем в себя солнечное зубчатое колесо 21а, закрепленное на валу 19 двигателя 3. Спереди ударника 41 вокруг его центральной оси выполнена соединительная ось 41а, выступающая вперед в осевом направлении, и эта соединительная ось 41а входит в цилиндрическую соединительную выемку 46f, выполненную сзади наковальни 46 вокруг ее центральной оси. Соединительная ось 41а и соединительная выемка 46f сопряжены друг с другом по скользящей посадке с возможностью их вращения относительно друг друга.
На фиг.4 показан вентилятор 18 охлаждения. Вентилятор 18 охлаждения изготовлен цельным, путем формования из синтетической смолы, такой как пластмасса. По центру вращения вентилятора охлаждения выполнены сквозное отверстие 18а, через которое проходит вал 19, цилиндрическая часть 18b, удерживающая вентилятор на заданном расстоянии от ротора 3а и охватывающая вал 19 на заданном расстоянии в осевом направлении, а снаружи цилиндрической части 18b по периферии выполнена группа пластин 18с. Спереди и сзади каждой пластины 18с выполнена одна кольцевая часть вентилятора, и воздух, всасываемый в осевом направлении сзади (независимо от направления вращения вентилятора 18 охлаждения), выбрасывается наружу в окружном направлении из отверстий 18d, выполненных снаружи по периферии вентилятора охлаждения. Поскольку вентилятор 18 охлаждения работает по принципу так называемого центробежного вентилятора, соединен с валом 19 двигателя 3 непосредственно, без задействования планетарного редуктора 21, и вращается с частотой вращения, достаточно высокой по сравнению с частотой вращения ударника 41, внутренние компоненты могут обдуваться достаточным объемом воздуха.
Далее со ссылкой на фиг.5 описывается устройство и работа системы управления двигателем. На фиг.5 показана функциональная схема системы управления двигателем. В рассматриваемом варианте осуществления изобретения двигатель 3 представляет собой трехфазный бесщеточный электрический двигатель постоянного тока. Этот бесщеточный электрический двигатель постоянного тока относится к типу двигателей с так называемым внутренним ротором и имеет ротор 3а, содержащий постоянные магниты (магниты) с несколькими (в рассматриваемом варианте осуществления изобретения - двумя) наборами полюсов N-S, статор 3b, состоящий из трехфазных обмоток U, V и W статора, включенных по схеме звезды, и трех датчиков 58 углового положения (датчиков Холла), распределенных в окружном направлении с заданным интервалом, например, расположенных через каждые 60°, для регистрации углового положения ротора 3а. На основании сигналов регистрации положения ротора, поступающих от датчиков 58 углового положения, осуществляется управление направлением и временем подачи электрической энергии на обмотки U, V и W статора, в результате чего происходит вращение ротора двигателя 3. Датчики 58 углового положения расположены на плате 7 напротив постоянных магнитов 3с ротора 3а.
Электронные элементы, смонтированные на плате 7, включают в себя шесть переключающих элементов Q1-Q6, таких как полевые транзисторы (ПТ), включенные по трехфазной мостовой схеме. Соответствующие затворы шести переключающих элементов Q1-Q6, включенных по мостовой схеме, соединены со схемой 53 вывода управляющих сигналов, смонтированной на плате 9 управления, а соответствующие стоки/истоки шести переключающих элементов Q1-Q6 соединены с обмотками U, V и W статора, включенными по схеме звезды. Таким образом, шесть переключающих элементов Q1-Q6 выполняют операции переключения по сигналам управления переключающими элементами (управляющим сигналам, таким как сигналы Н4, Н5 и Н6), поступающим из схемы 53 вывода управляющих сигналов, и подают на обмотки U, V и W статора электрическую энергию в виде напряжений Vu, Vv и Vw трех фаз (фаз U, V и W), получаемую из приложенного к инверторной схеме 52 напряжения постоянного тока аккумуляторной батареи 30.
Среди сигналов управления переключающими элементами (сигналы трех фаз), управляющих выдачей шестью переключающими элементами Q1-Q6 соответствующих сигналов, управляющие сигналы, подаваемые на три переключающих элемента Q4, Q5 и Q6, расположенных со стороны отрицательного полюса источника питания, вырабатываются в виде широтно-импульсно-модулированных сигналов (ШИМ-сигналов) Н4, Н5 и Н6, причем ширина импульсов (коэффициент заполнения, или скважность) ШИМ-сигналов изменяется вычислительным устройством 51, смонтированным на плате 9 управления, на основании сигнала регистрации степени нажатия (хода) клавиши 8а пускового выключателя 8, посредством которой регулируется величина подаваемой в двигатель 3 мощности и осуществляется управление пуском/остановом двигателя 3 и скоростью вращения его ротора.
ШИМ-сигналы подаются либо на переключающие элементы Q1-Q3 инверторной схемы 52, расположенные со стороны положительного полюса источника питания, либо на переключающие элементы Q4-Q6 инверторной схемы 52, расположенные со стороны отрицательного полюса источника питания, а управление подачей электрической энергии, получаемой из напряжения постоянного тока аккумуляторной батареи 30, на обмотки U, V и W статора осуществляется путем переключения с высокой скоростью переключающих элементов Q1-Q3 или переключающих элементов Q4-Q6. В рассматриваемом варианте осуществления изобретения ШИМ-сигналы подаются на переключающие элементы Q4-Q6, расположенные со стороны отрицательного полюса источника питания. Таким образом, управление скоростью вращения ротора двигателя 3 может осуществляться путем управления шириной импульсов ШИМ-сигналов с обеспечением регулирования электрической энергии, подаваемой на каждую из обмоток U, V и W статора.
Импульсно-силовая ручная машина 1 имеет переключатель 14 направления вращения для переключения направления вращения ротора двигателя 3 между прямым и обратным вращениями. Когда схема 62 задания направления вращения обнаруживает изменение положения переключателя 14 направления вращения, она передает в вычислительное устройство 51 управляющий сигнал на переключение направления вращения ротора двигателя. Вычислительное устройство 51 содержит центральный процессор (ЦП) для выдачи управляющих сигналов в результате обработки данных обрабатывающей программой, постоянное запоминающее устройство (ПЗУ) для хранения обрабатывающей программы или данных управления, оперативное запоминающее устройство (ОЗУ) для временного хранения данных, таймер и т.д., хотя эти элементы на чертеже не показаны.
Схема 53 вывода управляющих сигналов формирует управляющий сигнал для попеременного переключения заданных переключающих элементов Q1-Q6 на основании выходных сигналов схемы 62 задания направления вращения и схемы 54 регистрации углового положения ротора и выдает управляющий сигнал в схему 53 вывода управляющих сигналов. Это обеспечивает попеременную подачу электрической энергии на заданные обмоточные провода обмоток U, V и W статора и вращение ротора 3а в заданном направлении вращения. В этом случае управляющие сигналы, подаваемые на переключающие элементы Q4-Q6, расположенные со стороны отрицательного полюса источника питания, выдаются в виде широтно-импульсно-модулированных (ШИМ) сигналов на основании выходного управляющего сигнала схемы 61 задания подаваемого напряжения. Значение тока, подаваемого в двигатель 3, измеряется схемой 59 регистрации тока и регулируется в качестве заданной электрической энергии привода посредством обратной связи по току с вычислительным устройством 51. ШИМ-сигналы могут подаваться и на переключающие элементы Q1-Q3, расположенные со стороны положительного полюса источника питания.
С блоком 50 управления, смонтированным на плате 9 управления, связан датчик 56 силы удара, определяющий величину создаваемого в наковальне 46 удара, и выходной сигнал этого датчика вводится в вычислительное устройство 51 через схему 57 регистрации силы удара. Датчик 56 силы удара может быть выполнен в виде присоединенного к наковальне 46 тензометра и т.д., и когда заворачивание завершено с нормальным крутящим моментом затяжки, двигатель 3 может быть автоматически остановлен посредством выходного сигнала датчика 56 силы удара.
Далее, перед рассмотрением работы ударного механизма в составе ударника 41 и наковальни 46, относящихся к рассматриваемому варианту осуществления изобретения, ниже со ссылкой на фиг.6 и 7 описывается базовая конструкция ударника и наковальни и принцип их ударного взаимодействия. На фиг.6 показаны ударник 151 и наковальня 156, относящиеся к базовой конструкции (второй вариант осуществления изобретения). Ударник 151 выполнен с набором выступающих частей, т.е. с выступающей частью 152 и выступающей частью 153, которые выдаются из цилиндрической основной части 151b корпуса ударника в осевом направлении. Спереди по центру основной части 151b корпуса ударника выполнена соединительная ось 151а, входящая в соединительную выемку (на чертеже не показана), выполненную в наковальне 156 сзади, в результате чего ударник 151 и наковальня 156 соединены между собой с возможностью вращения относительно друг друга на заданный угол, меньший одного оборота (меньший 360°). Выступающая часть 152 ударника действует в качестве кулачка и имеет плоские ударяющие поверхности 152а и 152b, выполненные с обеих сторон в окружном направлении. Ударник 151 также имеет балансировочную выступающую часть 153 для уравновешивания выступающей части 152 при вращении. Поскольку выступающая часть 153 действует в качестве противовеса для обеспечения балансировки ударника, она не имеет ударяющей поверхности.
С задней стороны основной части 151b корпуса ударника выполнена дисковая часть 151с, соединенная с основной частью посредством перемычки 151d. Пространство между основной частью 151b корпуса ударника и дисковой частью 151с предусмотрено для размещения сателлита 21b планетарного редуктора 21, а в дисковой части 151с выполнено сквозное отверстие 151f под ось 21с сателлита 21b. Хотя это на чертеже и не показано, отверстие под ось 21с сателлита 21b выполнено также в основной части 151b корпуса ударника со стороны, обращенной к дисковой части 151с.
Наковальня 156 выполнена с гнездом 156а, предназначенным для установки рабочего инструмента со стороны переднего торца цилиндрической основной части 156b корпуса наковальни, а с задней стороны основной части 156b корпуса наковальни выполнены две выступающие части 157 и 158, выдающиеся из основной части 156b корпуса наковальни радиально наружу. Выступающая часть 157 наковальни представляет собой кулачок, имеющий ударяемые поверхности 157а и 157b, а выступающая часть 158 наковальни представляет собой противовес и не имеет ударяемой поверхности. Поскольку выступающая часть 157 наковальни рассчитана на то, чтобы сталкиваться с выступающей частью 152 ударника, ее наружный диаметр равен наружному диаметру выступающей части 152 ударника. Обе выступающие части 153 и 158, которые действуют лишь в качестве противовесов, выполнены таким образом, чтобы не задевать друг за друга и не сталкиваться с какими бы то ни было деталями. Для того чтобы сделать угол возможного поворота ударника 151 и наковальни 156 относительно друг друга как можно большим (но менее одного оборота), выступающие части 153 и 158 выполнены с малой радиальной толщиной для увеличения их окружной протяженности с целью уравновешивания выступающих частей 152 и 157 во время вращения. Благодаря выбору большого угла относительного поворота выступающих частей достигается большая протяженность пути ускорения, или разгона, ударника перед его столкновением с наковальней, что позволяет наносить удары со значительной энергией.
На фиг.7 показано шесть стадий одного цикла вращательных движений ударника 151 и его взаимодействия с наковальней 156 во время работы ручной машины. Плоскость сечения на фиг.7 перпендикулярна осевому направлению и проходит через ударяющую поверхность 152а (фиг.6). В состоянии, показанном на фиг.7(1), пока воспринимаемый от рабочего инструмента крутящий момент заворачивания мал, наковальня 156 вращается против часовой стрелки, толкаемая ударником 151. Когда же крутящий момент заворачивания станет большим, и дальнейшее вращение наковальни за счет одной лишь толкающей силы со стороны ударника 151 станет невозможным, поскольку ударник 151 упрется в наковальню 156, выполняется реверс двигателя 3 для поворота ударника 151 в обратном (по отношению к направлению заворачивания) направлении по стрелке 161. За счет выполняемого в показанном на чертеже (1) состоянии реверса двигателя 3, сопровождающегося поворотом выступающей части 152 ударника 151 в направлении стрелки 161, и дальнейшего обратного вращения ротора двигателя 3 выступающая часть 152 ударника поворачивается с ускорением в направлении стрелки 162, проходя мимо наружной периферийной стороны выступающей части 158 наковальни, как показано на чертеже (2). Аналогичным образом, наружный диаметр Ra1 выступающей части 158 наковальни меньше внутреннего диаметра Rh1 выступающей части 152 ударника, и поэтому эти две выступающие части не сталкиваются друг с другом. Наружный диаметр Ra2 выступающей части 157 наковальни меньше внутреннего диаметра Rh2 выступающей части 153 ударника, и поэтому эти две выступающие части не сталкиваются друг с другом. При таком взаимном положении выступающих частей ударника и наковальни угол поворота ударника 151 и наковальни 156 относительно друг друга может превышать 180°, что позволяет обеспечить достаточный угол обратного поворота ударника 151 относительно наковальни 156.
При дальнейшем обратном вращении ударника 151 и достижении им показанного на фиг.7(3) положения (положения остановки ударника после его обратного вращения, или отвода), как показано стрелкой 163а, вращение ротора двигателя 3 приостанавливается на заданный период времени, после чего начинается вращение ротора двигателя 3 в направлении стрелки 163b (направление нормального вращения). При вращении ударника 151 в направлении обратного вращения важно надежно остановить ударник 151 в положении его остановки, чтобы он не столкнулся с наковальней 156. Хотя положение остановки ударника 151, находящееся до достижения положения, в котором ударник сталкивается с наковальней 156, задается произвольно, желательно, чтобы положение остановки ударника находилось на как можно большем удалении в соответствии с требуемым крутящим моментом затяжки. Положение остановки ударника после его отвода не требуется каждый раз задавать одинаковым, и в начальной стадии заворачивания угол поворота при обратном вращении может задаваться малым, а по мере затягивания резьбового соединения угол поворота при обратном вращении может задаваться большим. Если задавать положение остановки ударника изменяющимся таким образом, то, поскольку время, затрачиваемое на обратное вращение ударника, можно свести к минимуму, удар по наковальне может совершаться быстро за малый отрезок времени.
Затем ударнику 151 сообщается ускорение, и он, проходя в направлении стрелки 164 через положение, показанное на фиг.7(4), сталкивается в состоянии ускорения ударяющей поверхностью 152а своей выступающей части 152 с ударяемой поверхностью 157а наковальни 156 в положении, показанном на фиг.7(5). В результате этого столкновения наковальне 156 передается высокий момент, и наковальня 156 поворачивается в направлении, показанном стрелкой 166. В положении, показанном на фиг.7(6), как ударник 151, так и наковальня 156 повернулись на заданный угол из положения, показанного на фиг.7(1), а заворачиваемый крепежный элемент затянулся с требуемым крутящим моментом затяжки за счет повторения процесса, начинающегося в состоянии, показанном на фиг.7(1), и заканчивающегося в состоянии, показанном на фиг.7(5).
Как показано выше, при использовании ударника 151 и наковальни 156, относящихся ко второму варианту осуществления изобретения, импульсно-силовая ручная машина может быть реализована с простой конструкцией ударного механизма, образованного ударником 151 и наковальней 156, за счет использования режима привода с реверсированием двигателя 3 и приведением его ротора в обратное вращение. В случае ударного механизма такой конструкции двигатель также может работать в режиме сверления при соответствующем выборе режима приведения двигателя 3 в действие. Например, в режиме сверления ударник может приводиться во вращение, следуя за наковальней 156, как показано на фиг.7(6), просто за счет вращения ротора двигателя 3 из положения, показанного на фиг.7(5), для вращения ударника 151 в направлении нормального вращения. Таким образом, повторяя эту стадию, можно заворачивать крепежные элементы, такие как шурупы или болты, на высокой скорости при малом крутящем моменте затяжки.
В импульсно-силовой ручной машине 1, относящейся к рассматриваемому варианту осуществления изобретения, в качестве двигателя 3 используется бесщеточный электрический двигатель постоянного тока. Таким образом, путем вычисления значения тока, поступающего в двигатель 3 из схемы 59 регистрации тока (см. фиг.5), регистрации состояния, когда значение тока стало больше заданного значения, и остановки двигателя 3 посредством вычислительного устройства 51 можно электронными средствами реализовать так называемый механизм электронной предохранительной муфты (ограничения крутящего момента), в котором подача электроэнергии прерывается после затягивания крепежного элемента с заданным крутящим моментом. Соответственно, в импульсно-силовой ручной машине 1, относящейся к рассматриваемому варианту осуществления изобретения, механизм электронной предохранительной муфты также может быть реализован во время работы в режиме сверления, и ударный механизм с простой конструкцией позволяет реализовать многорежимную резьбозавертывающую ручную машину, имеющую режим сверления без задействования электронной предохранительной муфты, режим сверления с задействованием электронной предохранительной муфты и ударный режим.
Далее, со ссылкой на фиг.8 и 9 подробно рассматривается конструкция ударного механизма 40, показанного на фиг.1 и 2. На фиг.8 изображены ударник 41 и наковальня 46, относящиеся к первому варианту осуществления изобретения, причем ударник 41 изображен вполоборота спереди, а наковальня 46 - вполоборота сзади. На фиг.9 изображены ударник 41 и наковальня 46, причем ударник 41 изображен вполоборота сзади, а наковальня 46 - вполоборота спереди. Ударник 41 выполнен с двумя радиально вытянутыми частями 41с и 41d, выступающими в радиальном направлении из цилиндрической основной части 41b корпуса ударника. Хотя радиально вытянутые части 41d и 41с выполнены с соответствующими выступающими частями, выдающимися в осевом направлении, эта конструкция отличается от базовой конструкции (второй вариант осуществления изобретения), показанной на фиг.6, тем, что в радиально вытянутых частях 41d и 41с выполнены, соответственно, набор кулачковых частей и набор балансировочных частей.
Внешняя периферийная часть радиально вытянутой части 41с имеет форму веера, и из внешней периферийной части выдается вперед в осевом направлении выступающая часть 42. Веерообразная часть и выступающая часть 42 ударника действуют как в качестве кулачковой части (кулачка), так и в качестве балансировочной части. С обеих сторон выступающей части 42 ударника в окружном направлении выполнены ударяющие поверхности 42а и 42b. Обе ударяющие поверхности 42а и 42b выполнены плоскими и расположены под небольшим углом друг к другу, чтобы эффективно контактировать с ударяемыми поверхностями наковальни 46 (которая описывается ниже) всей своей площадью. Радиально вытянутая часть 41d также выполнена с веерообразной внешней периферийной частью, и масса этой веерообразной части увеличивается от центра ввиду ее формы. В результате радиально вытянутая часть хорошо действует в качестве балансировочной части. Далее, примерно посредине радиально вытянутой части 41d в радиальном направлении выполнена выступающая часть 43, выдающаяся вперед в осевом направлении. Выступающая часть 43 ударника действует в качестве кулачковой части (кулачка), и с обеих сторон этой выступающей части в окружном направлении выполнены ударяющие поверхности 43а и 43b. Обе ударяющие поверхности 43а и 43b выполнены плоскими и расположены под небольшим углом друг к другу, чтобы эффективно контактировать с ударяемыми поверхностями наковальни 46 (которая описывается ниже) всей своей площадью.
По центру основной части 41b корпуса ударника с передней стороны выполнена соединительная ось 41а, вставляемая в соединительную выемку 46f наковальни 46. С задней стороны основной части 41b корпуса ударника выполнены две дисковые части 44а и 44b и перемычки 44с, которые соединяют указанные дисковые части в двух местах в окружном направлении, что позволяет ударнику действовать в качестве водила планетарного редуктора. В двух местах дисковых частей 44а и 44b в окружном направлении выполнены соответствующие сквозные отверстия 44d, между дисковыми частями 44а и 44b расположены два сателлита 21b планетарного редуктора (см. фиг.3), а оси 21с (см. фиг.3) сателлитов 21b установлены в сквозных отверстиях 44d. С задней стороны дисковой части 44b выполнена цилиндрическая часть 44е, проходящая в осевом направлении в форме цилиндра. Своей наружной периферийной стороной цилиндрическая часть 44е удерживается внутри подшипника 16b. В полости 44f, находящейся внутри цилиндрической части 44е, расположено солнечное зубчатое колесо 21а (см. фиг.3). Как с точки зрения прочности, так и с точки зрения веса ударник 41 и наковальню 46, показанные на фиг.8 и 9, предпочтительно изготавливать цельными из металла.
Наковальня 46 выполнена с двумя радиально вытянутыми частями 46с и 46d, выступающими в радиальном направлении из цилиндрической основной части 46b корпуса наковальни. По внешней периферии радиально вытянутой части 46с выполнена выступающая часть 47, выдающаяся в осевом направлении назад. С обеих сторон выступающей части 47 наковальни в окружном направлении выполнены ударяемые поверхности 47а и 47b. Другая выступающая часть 48 наковальни, выдающаяся в осевом направлении назад, выполнена в корневой части (вокруг радиального центра) радиально вытянутой части 46d. С обеих сторон выступающей части 48 наковальни в окружном направлении выполнены ударяемые поверхности 48а и 48b. Когда ударник 41 вращается в направлении нормального вращения (направление вращения при заворачивании/затягивании винта, шурупа и т.д.), ударяющая поверхность 42а прилегает к ударяемой поверхности 47а, и одновременно ударяющая поверхность 43а прилегает к ударяемой поверхности 48а. Когда ударник 41 вращается в направлении обратного вращения (направление вращения при ослаблении или выворачивании винта, шурупа и т.д.), ударяющая поверхность 42b прилегает к ударяемой поверхности 47b, и одновременно ударяющая поверхность 43b прилегает к ударяемой поверхности 48b. Выступающие части 42, 43, 47 и 48 выполнены таким образом, чтобы одновременно соприкасаться в двух местах.
Таким образом, поскольку в случае показанных на фиг.8 и 9 ударника 41 и наковальни 46 удары по наковальне наносятся в двух местах, симметричных относительно осевого центра вращения, при нанесении ударов механизм хорошо уравновешен, и во время работы в ударном режиме импульсно-силовая ручная машина 1 практически не вибрирует. Поскольку ударяющие поверхности предусмотрены соответственно с обеих сторон выступающей части в окружном направлении, работа в ударном режиме возможна не только при нормальном вращении рабочего инструмента, но и при его обратном вращении, что позволяет создать легкую в использовании импульсно-силовую ручную машину. Поскольку ударник 41 бьет по наковальне 46 только в окружном направлении и не бьет по наковальне 46 в осевом направлении вперед, рабочий инструмент не оказывает излишнего давления на заворачиваемый крепежный элемент, что является преимуществом при заворачивании в древесину шурупов, саморезов и т.п.
Далее со ссылкой на фиг.10 рассматривается процесс работы ударного механизма, образованного ударником 41 и наковальней 46, показанными на фиг.8 и 9. В основном этот процесс аналогичен рассмотренному на фиг.7, а отличие заключается в том, что во время работы в ударном режиме удары наносятся ударяющими поверхностями не в одном месте, а одновременно в двух местах, расположенных по существу осесимметрично. На фиг.10 показано поперечное сечение плоскостью А-А, показанной на фиг.3. На фиг.10 показано взаимное положение выступающих частей 42 и 43, выдающихся из ударника 41 в осевом направлении, и выступающих частей 47 и 48, выдающихся из наковальни 46 в осевом направлении. Направлением вращения наковальни 47 при заворачивании крепежного элемента (при нормальном вращении) является направление против часовой стрелки.
На фиг.10(1) показано состояние, когда ударник 41 вращается в направлении обратного вращения для достижения максимально отведенного положения относительно наковальни 46 (эквивалентного состоянию, показанному на фиг.7(3)). Из этого состояния ударник 41 ускоряется в направлении стрелки 91 (в направлении нормального вращения), чтобы ударить по наковальне 46. Затем, как показано на фиг.10(2), выступающая часть 42 ударника проходит мимо наружной периферийной стороны выступающей части 48 наковальни, и одновременно выступающая часть 43 ударника проходит мимо внутренней периферийной стороны выступающей части 47 наковальни. Для того чтобы две выступающие части могли проходить мимо друг друга, внутренний диаметр RH2 выступающей части 42 ударника больше наружного диаметра RA1 выступающей части 48 наковальни, и поэтому эти выступающие части не сталкиваются друг с другом. Аналогичным образом, наружный диаметр RH1 выступающей части 43 ударника меньше внутреннего диаметра RA2 выступающей части 47 наковальни, и поэтому эти две выступающие части не сталкиваются друг с другом. При таком взаимном положении выступающих частей ударника и наковальни угол поворота ударника 41 и наковальни 46 относительно друг друга может превышать 180°, что позволяет обеспечить достаточный угол обратного поворота ударника 41 относительно наковальни 46, и этот угол обратного поворота может быть расположен на участке ускорения ударника 41, предшествующего удару ударника 41 по наковальне 46.
Далее, когда ударник 41 вращается в направлении нормального вращения с переходом в состояние, показанное на фиг.10(3), ударяющая поверхность 42а выступающей части 42 ударника сталкивается с ударяемой поверхностью 47а выступающей части 47 наковальни. Одновременно ударяющая поверхность 43а выступающей части 43 ударника сталкивается с ударяемой поверхностью 48а выступающей части 48 наковальни. Благодаря тому, что столкновение выступающих частей ударника и наковальни происходит в двух местах, противоположных друг другу относительно оси вращения, при нанесении ударов достигается хорошая уравновешенность ударника относительно наковальни 46. В результате этих ударов, как показано на фиг.10(4), наковальня 46 поворачивается в направлении стрелки 94, и за счет этого поворота происходит заворачивание крепежного элемента. Ударник 41 имеет выступающую часть 42, которая является одиночным выступом на своем радиальном уровне (ограниченном изнутри радиусом RH2 и снаружи радиусом RH3), и выступающую часть 43, которая является третьим одиночным выступом на своем радиальном уровне (ограниченном снаружи радиусом RH1). Наковальня 46 имеет выступающую часть 47, которая является одиночным выступом на своем радиальном уровне (ограниченном изнутри радиусом RA2 и снаружи радиусом RA3), и выступающую часть 48, которая является одиночным выступом на своем радиальном уровне (ограниченном снаружи радиусом RA1).
Далее рассматривается способ управления работой импульсно-силовой ручной машины 1, относящейся к рассматриваемому варианту осуществления изобретения. У импульсно-силовой ручной машины 1, относящейся к рассматриваемому варианту осуществления изобретения, наковальня 46 и ударник 41 выполнены с возможностью их поворота относительно друг друга на угол менее 360°. Поскольку ударник 41 не может повернуться относительно наковальни 46 более чем на один оборот, управление вращением также является однозначно определяемым по угловому положению в пределах оборота. На фиг.11 показаны: пусковой сигнал во время работы импульсно-силовой ручной машины 1, управляющий сигнал на выходе инверторной схемы, скорость вращения ротора двигателя 3 и сила удара, наносимого ударником 41 по наковальне 46. По оси абсцисс для соответствующих графиков отложено время (все графики приведены в едином масштабе времени).
В импульсно-силовой ручной машине 1, относящейся к рассматриваемому варианту осуществления изобретения, в случае заворачивания крепежного элемента в ударном режиме вначале заворачивание крепежного элемента выполняется на высокой скорости в режиме сверления, затем, если обнаружено, что потребный крутящий момент стал большим, заворачивание крепежного элемента продолжается путем переключения на ударный, или импульсный, режим (1), а если потребный крутящий момент стал еще больше, то заворачивание крепежного элемента выполняется путем переключения на ударный режим (2). В режиме сверления, длящемся от момента времени T1 до момента времени Т2, показанных на фиг.11, блок 50 управления управляет двигателем 3 на основании заданной частоты вращения. Поэтому двигатель 3 ускоряется, пока его ротор не достигнет заданной частоты вращения, показанной стрелкой 85а. После этого скорость вращения ротора двигателя 3, из-за нарастания силы реакции, действующей со стороны присоединенного к наковальне 46 рабочего инструмента, постепенно уменьшается до уровня, обозначенного стрелкой 85b. Таким образом, уменьшение скорости вращения выявляется путем регистрации значения тока, подаваемого в двигатель 3, и в момент времени Т2 выполняется переключение вращательного привода в импульсный режим (1).
Импульсный режим (1) - это режим, в котором двигатель 3 приводится в действие не непрерывно, а прерывисто, и приводится в действие импульсами, с многократным повторением последовательности "пауза→приведение в нормальное вращение". Выражение "приводится в действие импульсами" означает здесь управление приводом посредством импульсной подачи отпирающего сигнала в инверторную схему 52 и, соответственно, импульсной подачи в двигатель 3 управляющего тока, вызывающей импульсные изменения частоты вращения или крутящего момента на валу двигателя 3. Такая пульсация создается повторением цикла включения/отключения управляющего тока с большим периодом (например, с частотой, примерно составляющей от нескольких десятков герц до ста и нескольких десятков герц), например, путем отключения подаваемого в двигатель управляющего тока в период с момента времени Т2 до момента времени t21 (пауза), включения управляющего тока для приведение двигателя в действие в период с момента времени Т21 до момента времени Т3 (привод), отключения управляющего тока в период с момента времени Т3 до момента времени Т31 (пауза) и включения управляющего тока в период с момента времени Т31 до момента времени Т4. Хотя для управления частотой вращения ротора двигателя 3 при включенной подаче управляющего тока выполняется ШИМ-управление, период пульсации тока достаточно мал по сравнению с периодом (обычно несколько килогерц) управления посредством коэффициента заполнения импульсов.
В показанном на фиг.11 примере после того как в момент времени Т2 подача управляющего тока в двигатель 3 была приостановлена на заданный период времени, а скорость вращения ротора двигателя 3 уменьшилась до уровня, обозначенного стрелкой 85b, блок управления 51 (см. фиг.5) посылает управляющий сигнал 83а в схему 53 вывода управляющих сигналов, тем самым обеспечивая подачу в двигатель 3 пульсирующего управляющего тока (управляющего импульса) для ускорения двигателя. Такое управление двигателем во время его ускорения означает подачу импульсов необязательно при коэффициенте заполнения импульсов 100%, но и при коэффициенте заполнения импульсов, меньшем 100%. Затем поступает показанный стрелкой 88а сигнал силы удара, проходящий в результате сильного столкновения ударника 41 с наковальней 46 при скорости, показанной стрелкой 85с. При поступлении сигнала силы удара подача управляющего тока в двигатель 3 приостанавливается на заданный период времени, и скорость вращения ротора двигателя уменьшается снова, до уровня, обозначенного стрелкой 85d. После этого блок управления 51 посылает в схему 53 вывода управляющих сигналов управляющий сигнал 83b, тем самым ускоряя двигатель 3. Затем поступает показанный стрелкой 88b сигнал силы удара, проходящий в результате сильного столкновения ударника 41 с наковальней 46 при скорости, показанной стрелкой 85е. В импульсном режиме (1) описанная выше последовательность "пауза→приведение в нормальное вращение" для реализации прерывистого приведения двигателя 3 в действие повторяется один или несколько раз. Если обнаружено, что для заворачивания крепежного элемента требуется еще более высокий крутящий момент, выполняется переключение вращательного привода в импульсный режим (2). Определение того, необходим ли для заворачивания крепежного элемента еще более высокий крутящий момент, может осуществляться, например, по частоте вращения ротора двигателя 3 до или после соответствующего стрелке 85е момента времени, когда поступает сигнал силы удара, показанный стрелкой 88b.
Хотя импульсный режим (2) также предусматривает прерывистое приведение двигателя 3 в действие, т.е. приведение в движение импульсами, аналогично импульсному режиму (1), в этом случае двигатель приводится в действие путем многократного повторения иной последовательности, а именно: "пауза→приведение в обратное вращение →пауза (остановка)→приведение в нормальное вращение". То есть при работе ручной машины в импульсном режиме (2) для сообщения ротору двигателя 3 не только нормального вращения, но и обратного вращения ударник 41 ускоряется в направлении нормального вращения, чтобы сильно столкнуться с наковальней 46, лишь после поворота ударника 41 в направлении обратного вращения на достаточное угловое расстояние относительно наковальни 46. Подобная схема сообщения ударнику 41 движения позволяет создавать на наковальне 46 высокий крутящий момент заворачивания крепежного элемента.
В примере, показанном на фиг.11, когда в момент времени Т4 выполняется переключение в импульсный режим (2), приведение двигателя 3 в действие временно останавливается, а затем ротор двигателя 3 начинает вращаться в направлении обратного вращения за счет посылки в схему 53 вывода управляющих сигналов управляющего сигнала 84а в отрицательном направлении. При выполнении нормального вращения или обратного вращения это нормальное или обратное вращение реализуется путем смены формы каждого управляющего сигнала (сигнал включения/отключения питания двигателя), выдаваемого схемой 53 вывода управляющих сигналов в каждый из переключающих элементов Q1-Q6. Если ротор двигателя 3 повернулся в направлении обратного вращения на заданный угол, подача управляющего тока в двигатель 3 временно прекращается с последующим началом приведения ротора двигателя в нормальное вращение. Для этого в схему 53 вывода управляющих сигналов посылается управляющий сигнал 84b в положительном направлении. В случае вращательного привода с помощью инверторной схемы 52 управляющий сигнал не переключается на плюсовую или минусовую сторону. Управляющий сигнал классифицируется как действующий в направлении "плюс" или "минус" и схематически представлен на фиг.11, что обеспечивает простоту понимания того, вращается ли ротор двигателя, и если да, то в каком направлении.
Ударник 41 сталкивается с наковальней 46 в момент времени, когда скорость вращения ротора двигателя 3 достигла максимального значения (стрелка 86с). В результате этого столкновения создается крутящий момент 89а на заворачивание крепежного элемента, значительно более высокий, чем крутящие моменты 88а, 88b, создаваемые в импульсном режиме (1). При подобном столкновении частота вращения ротора двигателя 3 уменьшается с уровня, обозначенного стрелкой 86с, до уровня, обозначенного стрелкой 86d. Кроме того, в момент обнаружения обозначенного стрелкой 89а столкновения ударника с наковальней управление двигателем может предусматривать прекращение подачи управляющего сигнала в двигатель 3. В этом случае, если крепежным элементом является болт, гайка и т.д., уменьшается отдача от удара, передаваемая на руку пользователя. Если же в рассматриваемом варианте осуществления изобретения управляющий ток подается в двигатель 3 даже после столкновения ударника с наковальней, ощущаемая пользователем сила реакции мала по сравнению с режимом сверления, и подходит для работы в условиях средней нагрузки. Таким образом, скорость заворачивания крепежного элемента может быть увеличена, а потребление энергии может быть снижено по сравнению с мощным импульсным режимом. После этого аналогичным образом выполняется заворачивание крепежного элемента высоким крутящим моментом, для чего заданное количество раз повторяется последовательность "пауза→приведение в обратное вращение→пауза (остановка)→приведение в нормальное вращение", и при отпускании пользователем в момент времени Т7 клавиши пускового выключателя двигатель 3 останавливается, и операция по заворачиванию крепежного элемента завершается. Помимо снятия пользователем управляющего воздействия с пускового выключателя двигатель 3 также может быть остановлен в случае, если вычислительное устройство 51 по выходному сигналу датчика 56 силы удара (см. фиг.5) определит, что заворачивание крепежного элемента завершено с заданным крутящим моментом затяжки.
Как указано выше, в рассматриваемом варианте осуществления изобретения в начальной стадии заворачивания крепежного элемента, когда для этого требуется лишь небольшой крутящий момент, вращательный привод работает в режиме сверления, затем при увеличении потребного крутящего момента заворачивание крепежного элемента выполняется в ударном режиме (1) путем прерывистого приведения ротора двигателя во вращение только в направлении нормального вращения, и в заключительной стадии заворачивания ручная машина работает в ударном режиме (2) с прерывистым приведением двигателя 3 в действие в направлениях нормального и обратного вращений. Кроме того, заворачивание крепежного элемента может выполняться с использованием ударного режима (1) и ударного режима (2). Также можно использовать управляющее воздействие для перевода машины из режима сверления сразу в ударный режим (2), минуя ударный режим (1). Поскольку в ударном режиме (2) ротор двигателя попеременно вращается в направлениях нормального и обратного вращений, скорость заворачивания крепежного элемента становится значительно меньше, чем в режиме сверления или в ударном режиме (1). Когда скорость заворачивания крепежного элемента таким образом резко уменьшается, у оператора при переходе ручной машины в ударный режим возникает сильное, по сравнению с импульсно-силовой ручной машиной, имеющей обычный ударно-вращательный механизм, ощущение дискомфорта. Таким образом, при переходе из режима сверления в ударный режим (2) наличие между ними промежуточного ударного режима (1) позволяет сделать тактильные ощущения пользователя естественными. Например, как можно дольше заворачивая крепежный элемент в режиме сверления или в ударном режиме (1), можно обеспечить сокращение длительности операции заворачивания крепежного элемента.
Далее, со ссылкой на фиг.12-16 описывается процесс управления импульсно-силовой ручной машиной 1 в рассматриваемом варианте осуществления изобретения. На фиг.12 показана блок-схема алгоритма управления импульсно-силовой ручной машиной 1 в рассматриваемом варианте осуществления изобретения. До начала пользователем работы импульсно-силовая ручная машина 1 определяет (шаг 101), выбран ли посредством переключателя 32 ударный режим (см. фиг.2). Если ударный режим выбран, процесс управления переходит к шагу 102, а если ударный режим не выбран, т.е. в случае выбора обычного режима сверления, процесс управления переходит к шагу 110.
В ударном (импульсном) режиме вычислительное устройство 51 определяет, включен ли пусковой выключатель 8. Если пусковой выключатель включен (клавиша 8а нажата), как показано на фиг.11, двигатель 3 запускается в режиме сверления (шаг 103), и в соответствии со степенью нажатия клавиши 8а пускового выключателя начинается ШИМ-управление инверторной схемой 52 (шаг 104). Затем вращение ротора двигателя 3 ускоряется с одновременным контролем подаваемого в двигатель 3 пикового тока на предмет непревышения им верхнего предела р. Далее, по истечении заданного времени (t миллисекунд) после пуска двигателя посредством выходного сигнала схемы 59 регистрации тока (см. фиг.5) регистрируется значение I тока, подаваемого в двигатель 3 (шаг 106). Если зарегистрированное значение I тока не превышает заданного значения (р1 ампер), процесс возвращается к шагу 104, а если значение тока превысило заданное значение (р1 ампер), процесс переходит к шагу 108 (шаг 107). Затем определяется (шаг 108), превышает ли зарегистрированное значение I тока второе заданное значение (р2 ампер).
Если на шаге 108 зарегистрированное значение I тока не превышает р2 ампер, т.е. если выполнено условие р1<I<р2, процесс управления после выполнения алгоритма импульсного режима (1), показанного на фиг.14, переходит к шагу 109 (шаг 120). Если же зарегистрированное значение I тока превышает р2 ампер, процесс управления переходит к шагу 109 сразу, без выполнения алгоритма импульсного режима (1). На шаге 109 определяется, находится ли пусковой выключатель 8 во включенном состоянии. Если пусковой выключатель выключен, процесс управления возвращается к шагу 101. Если же пусковой выключатель остается включенным, процесс управления возвращается к шагу 101 после выполнения алгоритма импульсного режима (2), показанного на фиг.16.
Если на шаге 101 выбран режим сверления, выполняется этот режим сверления (шаг 110), причем управление двигателем в режиме сверления осуществляется таким же образом, что и управление на шагах 102-107. Затем, при регистрации управляющего тока, вызывающего срабатывание электронной предохранительной муфты, или состояния перегрузки по току, непосредственно предшествующего блокировке двигателя 3, в качестве тока р1 на шаге 107, с соответствующей остановкой двигателя 3 (шаг 111), работа в режиме сверления завершается, и процесс управления возвращается к шагу 101.
Ниже со ссылкой на фиг.13 описывается процесс переключения режимов, происходящий на шагах 107 и 108. На верхних графиках показано изменение частоты вращения ротора двигателя 3 с течением времени, а на нижних графиках показано изменение значения подаваемого в двигатель 3 тока с течением времени, причем верхние и нижние графики выполнены в едином масштабе времени. Как показано на левых графиках, при нажатии на клавишу пускового выключателя в момент времени TA (эквивалентном шагу 102 на фиг.12) двигатель 3 запускается и ускоряется, как показано стрелкой 113а. Во время этого ускорения выполняется стабилизация тока с ограничением тока максимальным значением р, как показано стрелкой 114а. Когда частота вращения ротора двигателя 3 достигла заданного значения (стрелка 113b), ток, стабилизированный во время ускорения, начинает вести себя обычным образом, как показано стрелкой 114b. Соответственно, значение тока уменьшается. После этого при увеличении силы реакции, воспринимаемой от крепежного элемента, такого как шуруп, болт и т.д., по мере его заворачивания, частота вращения ротора двигателя 3 постепенно уменьшается, как показано стрелкой 113с, а значение подаваемого в двигатель 3 тока увеличивается. Затем, по истечении t миллисекунд после пуска двигателя 3 определяется значение тока. Если выполнено условие р1<I<р2, как показано стрелкой 114с, процесс на шаге 120 переходит на управление двигателем в импульсном режиме (1), рассматриваемом ниже.
Как показано на правых графиках, при нажатии на клавишу пускового выключателя в момент времени TB (эквивалентном шагу 102 на фиг.12) двигатель 3 запускается и ускоряется, как показано стрелкой 115а. Во время этого ускорения выполняется стабилизация тока с ограничением тока максимальным значением р, как показано стрелкой 116а. Когда частота вращения ротора двигателя 3 достигает заданного значения (стрелка 115b), ток во время ускорения начинает вести себя обычным образом, как показано стрелкой 116b. Таким образом, значение тока уменьшается. После этого при увеличении силы реакции, воспринимаемой от крепежного элемента, такого как шуруп, болт и т.д., по мере его заворачивания, частота вращения ротора двигателя 3 постепенно уменьшается, как показано стрелкой 115с, а значение подаваемого в двигатель 3 тока увеличивается. В данном примере сила реакции, воспринимаемая от крепежного элемента, увеличилась быстро. Таким образом, как показано стрелкой 115с, частота вращения ротора двигателя 3 сильно уменьшается, а интенсивность нарастания значения тока велика. Тогда, поскольку значение тока по истечении t миллисекунд с момента пуска двигателя 3 удовлетворяет условию р2<I, как показано стрелкой 116с, процесс на шаге 140 переходит на управление двигателем в импульсном режиме (2), рассматриваемом ниже со ссылкой на фиг.16.
Обычно при заворачивании шурупа, болта и т.п. предполагается, что крутящий момент его затяжки часто непостоянен из-за отклонений от номинальной точности механической обработки подобного крепежного элемента (шурупа или болта), состояния затягиваемого крепежного элемента, изменчивости свойств материала, таких как сучковатость, структура дерева и т.д. Поэтому крепежный элемент может быть затянут одним ударом непосредственно перед завершением процесса заворачивания, выполняемого только в режиме сверления. В подобном случае, при пропуске заворачивания в ударном режиме (1) и переключении на заворачивание в режиме сверления (2) с более высоким крутящим моментом затяжки, операция заворачивания крепежного элемента может быть эффективно завершена за короткое время.
Далее со ссылкой на фиг.14 описывается алгоритм управления импульсно-силовой ручной машиной в импульсном режиме (1). Если процесс управления ручной машиной переключился в импульсный режим (1), то сначала, по истечении заданного периода паузы, пиковый ток ограничивается таким образом, чтобы он был меньше или равен предельному значению р3 ампер (шаг 121), а ротор двигателя 3 в течение заданного периода времени, т.е. Т миллисекунд, приводится во вращение путем подачи в двигатель тока нормального вращения (шаг 122). Затем по истечении времени Т миллисекунд регистрируется частота вращения N1n [об/мин] ротора двигателя 3 (n=1, 2,…) (шаг 123). Далее подаваемый в двигатель 3 управляющий ток отключается, и измеряется время t1n, прошедшее до понижения частоты вращения ротора двигателя 3 от N1n до N2n (=N1n/2). Затем получают значение времени t2n, определяемое как t2n=X-t1n, в течение этого времени t2n в двигатель 3 подается ток нормального вращения (шаг 126), и пиковый ток удерживается меньшим или равным р3 ампер, с обеспечением ускорения ротора двигателя 3. Затем для переключения в импульсный режим (2) определяется, является ли частота вращения N1(n+1) ротора двигателя 3 по истечении времени t2n меньшей или равной пороговой частоте вращения Rth. Если частота вращения ротора двигателя меньше или равна значению Rth, алгоритм управления в импульсном режиме (1) завершается, и процесс выполнения операций управления возвращается к шагу 120, показанному на фиг.12, а если частота вращения ротора двигателя больше или равна Rth, процесс выполнения операций управления возвращается к шагу 124 (шаг 128).
На фиг.15 показаны изменение частоты вращения ротора двигателя 3 с течением времени и изменение значения подаваемого в двигатель 3 тока с течением времени при выполнении алгоритма управления, показанного на фиг.14. Сначала в течение отрезка времени Т в двигатель 3 подается управляющий ток 132. Поскольку подача управляющего тока осуществляется с ограничением пикового тока таким образом, чтобы ток был меньше или равен р3 ампер, ток во время ускорения ограничивается, как показано стрелкой 132а, а затем значение тока уменьшается, как показано стрелкой 132b, в то время как частота вращения ротора двигателя 3 увеличивается. В момент времени T1, когда в результате соответствующего измерения установлено, что частота вращения ротора двигателя 3 достигла значения N11, вычисляется частота вращения N21, с которой начнется вращение ротора двигателя 3, для чего используется выражение N21=N11/2. Частота вращения N11 составляет, например, 10000 об/мин. После того как частота вращения ротора двигателя 3 уменьшилась до значения N21, в двигатель подается управляющий ток 133, и двигатель 3 ускоряется снова. Время t2n, в течение которого происходит подача управляющего тока 133, определяется по выражению t2n=X-t1n. Аналогично, хотя в циклах 2Х и 3Х управление осуществляется так же, с увеличением силы реакции (противодействия, или сопротивления, заворачиванию) интенсивность повышения частоты вращения ротора двигателя 3 уменьшается, и в момент времени 4Х частота вращения N14 станет меньшей или равной пороговой частоте вращения Rth. В этот момент времени выполнение импульсного режима (1) завершается, и процесс управления переключается на импульсный режим (2).
Далее, со ссылкой на фиг.16 описывается алгоритм управления импульсно-силовой ручной машиной в импульсном режиме (2). Сначала отключается подаваемый в двигатель 3 управляющий ток, и в течение 5 миллисекунд система управления двигателем находится в состоянии ожидания (шаг 141). Далее, в двигатель 3 подается ток обратного вращения для раскрутки его ротора до частоты вращения -3000 об/мин (шаг 142). Знак "минус" означает здесь, что ротор двигателя 3 в этом случае вращается в направлении, обратном направлению рабочего вращения с частотой 3000 об/мин. Далее, если частота вращения ротора двигателя 3 достигла -3000 об/мин, подаваемый в двигатель 3 ток отключается, и в течение 5 миллисекунд система управления двигателем находится в состоянии ожидания (шаг 143). Причина нахождения в состоянии ожидания в течение 5 миллисекунд заключается в том, что при резком реверсировании двигателя 3 корпус импульсно-силовой ручной машины может дернуться. Кроме того, это также связано с тем, что во время такого ожидания потребление электрической энергии отсутствует, а значит достигается экономия энергии. Далее, для привода двигателя 3 в направлении нормального вращения включается ток нормального вращения (шаг 144). Спустя 95 миллисекунд после включения тока нормального вращения подаваемый в двигатель 3 ток отключается. Однако до отключения этого тока ударник 41 успеет столкнуться с наковальней 46 (ударить по ней), создав на рабочем инструменте высокий крутящий момент заворачивания (шаг 145). После этого определяется, находится ли пусковой выключатель во включенном состоянии (нажата ли его клавиша). Если пусковой выключатель находится в выключенном состоянии (клавиша отпущена), вращение ротора двигателя 3 останавливается, управление двигателем в импульсном режиме (2) завершается, и процесс выполнения операций управления возвращается к шагу 140, показанному на фиг.12 (шаги 147 и 148). На шаге 147, если пусковой выключатель 8 находится во включенном состоянии, процесс выполнения операций управления возвращается к шагу 141 (шаг 147).
Рассмотренный выше вариант осуществления изобретения обеспечивает эффективное заворачивание крепежного элемента путем приведения двигателя в непрерывное вращение, прерывистое вращение только в направлении нормального вращения и прерывистое вращение в направлениях нормального и обратного вращений и с использованием ударника и наковальни, установленных с возможностью поворота относительно друг друга менее чем на один оборот. Далее, благодаря простоте конструктивного оформления ударника и наковальни достигается возможность миниатюризации и удешевления предлагаемой в изобретении импульсно-силовой ручной машины.
Хотя изобретение было описано выше на примере представленных на чертежах вариантов его осуществления, возможности осуществления изобретения этими выше вариантами не ограничиваются и могут предусматривать внесение в эти варианты различных изменений, не выходящих за рамки сущности изобретения и изобретательского замысла. Например, в качестве примера двигателя был приведен бесщеточный электрический двигатель постоянного тока, но изобретение не ограничивается применением такого двигателя, а допускает использование других видов двигателей, которые могут приводиться в действие в направлениях нормального и обратного вращений.
Далее, наковальня и ударник могут иметь любую подходящую форму. Необходимо лишь конструктивными мерами исключить возможность непрерывного вращения наковальни и ударника относительно друг друга (возможность их вращения с обгоном друг друга), обеспечить заданный угол их поворота относительно друг друга, меньший 360°, и сформировать на ударнике ударяющую поверхность, а на наковальне - ударяемую поверхность. Например, выступающие части ударника и наковальни могут быть выполнены таким образом, чтобы выдаваться не в осевом направлении, а в окружном направлении. Далее, выступающие части ударника и наковальни необязательно должны быть выпуклыми наружу и необязательно должны образовывать ударяющую поверхность и ударяемую поверхность заданной формы, эти выступающие части могут выдаваться внутрь ударника или наковальни (в виде выемок). Ударяющая поверхность и ударяемая поверхность необязательно должны быть плоскими, а могут иметь искривленную форму или другие формы, удобные с точки зрения формообразования ударяющей поверхности или ударяемой поверхности.
Ниже со ссылкой на фиг.17-29 в качестве примера ручной машины, относящейся к одному варианту осуществления изобретения, рассматривается импульсная резьбозавертывающая машина 1001 с электронным управлением (ударный/импульсный шуруповерт/гайковерт). Импульсная резьбозавертывающая машина 1001 с электронным управлением, изображенная на фиг.17, имеет корпус 1002, двигатель 1003, ведущую часть 1004 передаточного механизма, наковальню 1005 и выключающее устройство 1006. Корпус 1002 выполнен из полимерного материала, образует внешнюю оболочку импульсной резьбозавертывающей машины 1001 с электронным управлением и имеет основную часть 1021 по существу трубчатой формы и рукояточную часть 1022, выходящую из основной части корпуса.
Как показано на фиг.17, внутри основной части 1021 корпуса находится двигатель 1003, установленный таким образом, что продольное направление основной части корпуса совпадает с осевым направлением двигателя 1003, а ведущая часть 1004 передаточного механизма и ведомая часть 1005 передаточного механизма установлены по оси двигателя 1003 со стороны его одного из его торцов. В приведенном ниже описании направление, параллельное осевому направлению двигателя 1003, определено как продольное направление (направление "вперед-назад"), причем направление от двигателя 1003 к ударнику 1004 и наковальне 1005 соответствует направлению вперед. Определено также вертикальное направление (направление "вверх-вниз"), в котором рукояточная часть 1022 корпуса выступает из основной части 1021 корпуса, причем выступает она вниз, а направление, перпендикулярное продольному направлению, определено как поперечное направление (направление "вправо-влево").
С передней стороны внутри основной части 1021 корпуса расположен картер 1023 передаточного механизма, в котором установлены ведущая часть 1004 передаточного механизма и ведомая часть 1005 передаточного механизма. Картер 1023 передаточного механизма изготовлен из металла и выполнен по существу в форме воронки, диаметр которой постепенно уменьшается в направлении вперед, и обращен своим воронкообразным концом вперед. Передняя концевая часть картера ударного механизма выполнена с отверстием 1023а, через которое вперед выступает описываемый ниже держатель 1051 рабочего инструмента, а у внутренней стенки, ограничивающей отверстие 1023а, предусмотрена металлическая опора, поддерживающая наковальню 1005 с возможностью вращения.
В основной части 1021 корпуса имеется источник света 1002А, расположенный рядом с отверстием 1023а снизу картера 1023 передаточного механизма. Источник света 1002А выполнен и установлен с возможностью подсветки рабочей зоны вокруг переднего конца насадки, представляющей собой рабочий инструмент и на чертеже не показанной, когда насадка установлена на описываемом ниже держателе 1051 рабочего инструмента или вставлена в него. Дополнительно в основной части 1021 корпуса ниже источника света 1002А расположено колесико 1002В, представляющее собой вращающийся орган управления. Благодаря тому, что источник света 1002А встроен в основную часть 1021 корпуса, отсутствует необходимость в применении отдельного держателя для крепления источника света 1002А, а источник света 1002А зафиксирован просто и надежно. Кроме того, как источник света 1002А, так и колесико 1002В расположены в поперечном направлении, практически посредине основной части 1021 корпуса. Также основная часть 1021 корпуса выполнена с впускным и выпускным отверстиями (на чертеже не показаны), через которые окружающий воздух всасывается в основную часть 1021 корпуса и выбрасывается из нее описываемым ниже вентилятором 1032.
Рукояточная часть 1022 корпуса проходит книзу, выступая из середины основной части 1021 корпуса и отклоняясь назад, и выполнена за одно целое с основной частью 1021 корпуса. В рукояточной части 1022 корпуса смонтировано выключающее устройство 1006, на конце которого, глядя в направлении протяженности рукояточной части, съемным образом установлена аккумуляторная батарея 1024, снабжающая двигатель 1003 электрической энергией. Спереди в корневой области рукояточной части 1022 корпуса, рядом с основной частью 1021 корпуса, расположена клавиша пускового выключателя 1025, нажимаемая оператором. Кроме того, клавиша пускового выключателя 1025 расположена рядом с колесиком 1002В и под ним. Следовательно, нажимать на клавишу пускового выключателя 1025 и поворачивать колесико 1002В можно одним пальцем. Вращая колесико 1002В, можно включать режим сверления, режим электронной предохранительной муфты и импульсный режим, которые описываются ниже.
Сверху на основной части 1021 корпуса в ее задней области расположен дисплей 1026. Дисплей 1026 показывает, какой именно режим выбран из числа режима сверления, режима электронной предохранительной муфты и импульсного режима, которые описываются ниже.
Как показано на фиг.17, двигатель 1003 представляет собой бесщеточный электрический двигатель, содержащий ротор 1003А, часть которого представляет собой выходной вал 1031, и статор 1003В, расположенный внутри основной части 1021 корпуса вокруг ротора 1003А таким образом, что осевое направление выходного вала 1031 совпадает с продольным направлением. Выходной вал 1031 выступает из ротора 1003А вперед и назад, и установлен с возможностью вращения своими выступающими частями на подшипниках в основной части 1021 корпуса. На выступающем вперед участке выходного вала 1031 соосно с ротором двигателя установлен вентилятор 1032 с возможностью вращения вместе с выходным валом 1031. Также на крайнем спереди выступающем участке выходного вала предусмотрена шестерня 1031А, установленная соосно с выходным валом 1031 с возможностью вращения вместе с ним.
Ведущая часть 1004 передаточного механизма включает в себя редуктор 1041 и ударник 1042 и смонтирована в картере 1023 передаточного механизма спереди двигателя 1003. Редуктор 1041 имеет две планетарных ступени 1041В и 1041C с одним общим кольцевым зубчатым колесом 1041А. Кольцевое зубчатое колесо 1041А установлено внутри картера 1023 передаточного механизма и зафиксировано относительно основной части 1021 корпуса. Одна планетарная ступень 1041В расположена внутри кольцевого зубчатого колеса 1041А, находясь своими сателлитами в зацеплении с кольцевым зубчатым колесом 1041А, а шестерня 1031А используется в качестве солнечного зубчатого колеса. Вторая планетарная ступень 1041C расположена спереди первой планетарной ступенью 1041В внутри кольцевого зубчатого колеса 1041А, находясь своими сателлитами в зацеплении с кольцевым зубчатым колесом 1041А, а выходной вал первой планетарной ступени 1041В используется в качестве солнечного зубчатого колеса второй планетарной ступени.
Ударник 1042 выполнен на передней поверхности водила планетарной ступени 1041C и имеет первый ведущий выступ 1042А, выдающийся вперед и расположенный со смещением от центра вращения водила планетарной ступени 1041C, и второй ведущий выступ 1042В, расположенный с противоположной первому ведущему выступу 1042А стороны водила планетарной ступени 1041C относительно центра вращения этого водила (фиг.19).
Ведомая часть 1005 передаточного механизма включает в себя держатель 1051 рабочего инструмента и наковальню 1052 и расположена спереди от ведущей части 1004 передаточного механизма. Держатель 1051 рабочего инструмента выполнен цилиндрическим и установлен с возможностью вращения посредством металлической опоры 1023А в отверстии 1023а картера 1023 передаточного механизма. Кроме того, держатель 1051 рабочего инструмента имеет гнездо 1051а, выполненное со стороны переднего торца в направлении назад под вставляемую в это гнездо отверстие насадку, или биту, т.е. рабочий инструмент (на чертеже не показан), и снабжен втулкой 1051А, удерживающей насадку (на чертеже не показан) на переднем концевом участке.
Наковальня 1052 выполнена за одно целое с держателем 1051 рабочего инструмента, располагаясь внутри картера 1023 передаточного механизма за держателем 1051 рабочего инструмента, и имеет первый ведомый выступ 1052А, выдающийся назад и расположенный со смещением от центра вращения держателя 1051 рабочего инструмента, и второй ведомый выступ 1052В, расположенный с противоположной первому ведомому выступу 1052А стороны держателя 1051 рабочего инструмента относительно центра вращения последнего. Когда ударник 1042 вращается, первый ведущий выступ 1042 ударника и первый ведомый выступ 1052А наковальни сталкиваются друг с другом, и одновременно при столкновении второго ведущего выступа 1042В ударника и второго ведомого выступа 1052В наковальни крутящий момент с ударника 1042 передается на наковальню 1052. Более подробно взаимодействие ударника и наковальни описывается ниже.
Выключающее устройство 1006 содержит плату 1061, пусковой выключатель 1062, монтажную плату 1063 и соединяющие их провода. Плата 1061 расположена в рукояточной части 1022 корпуса рядом с аккумуляторной батареей 1024, соединена с аккумуляторной батареей 1024 и соединена с источником света 1002А, колесиком 1002В, пусковым выключателем 1062, монтажной платой 1063 и дисплеем 1026.
Далее, со ссылкой на фиг.18 рассматривается устройство системы управления двигателем 1003. В рассматриваемом варианте осуществления изобретения двигатель 1003 представляет собой трехфазный бесщеточный электрический двигатель постоянного тока. Ротор 1003А этого бесщеточного электрического двигателя постоянного тока содержит постоянные магниты с несколькими (в рассматриваемом варианте осуществления изобретения - двумя) наборами полюсов N-S, а статор 1003В содержит трехфазные обмотки U, V и W статора, включенные по схеме звезды. Для регистрации углового положения ротора 1003А используются датчики 1064 углового положения (датчики Холла), распределенные на плате 1061 в окружном направлении ротора 1003А с заданным интервалом, например, расположенные через каждые 60°. На основании сигналов регистрации положения ротора, поступающих от датчиков 1064 углового положения, осуществляется управление направлением и временем подачи электрической энергии на обмотки U, V и W статора, в результате чего происходит вращение ротора двигателя 1003. Датчики 1064 углового положения расположены на монтажной плате 1063 напротив постоянных магнитов 1003С ротора 1003А.
Электронные элементы, смонтированные на монтажной плате 1063, включают в себя шесть переключающих элементов Q1001-Q1006, таких как полевые транзисторы (ПТ), включенные по трехфазной мостовой схеме. Соответствующие затворы шести переключающих элементов Q1001-Q1006, включенных по мостовой схеме, соединены со схемой 1065 вывода управляющих сигналов, смонтированной на плате 1061 управления, а соответствующие стоки или соответствующие истоки шести переключающих элементов Q1001-Q1006 соединены с обмотками U, V и W статора, включенными по схеме звезды. Таким образом, шесть переключающих элементов Q1001-Q1006 выполняют операции переключения по сигналам управления переключающими элементами (управляющим сигналам, таким как сигналы Н4, Н5 и Н6), поступающим из схемы 1065 вывода управляющих сигналов, и подают на обмотки U, V и W статора электрическую энергию в виде напряжений Vu, Vv и Vw трех фаз (фаз U, V и W), получаемую из приложенного к инверторной схеме 1066 напряжения постоянного тока аккумуляторной батареи 1024.
Среди сигналов управления переключающими элементами (сигналы трех фаз), управляющих выдачей шестью переключающими элементами Q1001-Q1006 соответствующих сигналов, управляющие сигналы, подаваемые на три переключающих элемента Q1004, Q1005 и Q1006, расположенных со стороны отрицательного полюса источника питания, вырабатываются в виде широтно-импульсно-модулированных сигналов (ШИМ-сигналов) Н4, Н5 и Н6, причем ширина импульсов (коэффициент заполнения, или скважность) ШИМ-сигналов изменяется вычислительным устройством 1067, смонтированным на плате 1061, на основании сигнала определения степени нажатия (хода) клавиши пускового выключателя 1025, посредством которой регулируется величина подаваемой в двигатель 1003 мощности и осуществляется управление пуском/остановом двигателя 1003 и скоростью вращения его ротора.
ШИМ-сигналы подаются либо на переключающие элементы Q1001-Q1003 инверторной схемы 1066, расположенные со стороны положительного полюса источника питания, либо на переключающие элементы Q1004-Q1006 инверторной схемы 1066, расположенные со стороны отрицательного полюса источника питания, а управление подачей электрической энергии, получаемой из напряжения постоянного тока аккумуляторной батареи 1024, на обмотки U, V и W статора осуществляется путем переключения с высокой скоростью переключающих элементов Q1001-Q1003 или переключающих элементов Q1004-Q1006. В рассматриваемом варианте осуществления изобретения ШИМ-сигналы подаются на переключающие элементы Q1004-Q1006, расположенные со стороны отрицательного полюса источника питания. Таким образом, управление скоростью вращения ротора двигателя 1003 может осуществляться путем управления шириной импульсов ШИМ-сигналов с обеспечением регулирования электрической энергии, подаваемой на каждую из обмоток U, V и W статора.
Блок 1072 управления смонтирован на плате 1061 и имеет схему 1065 вывода управляющих сигналов, вычислительное устройство 1067, схему 1071 регистрации тока, схему 1076 регистрации нажатия клавиши пускового выключателя, схему 1070 задания подаваемого напряжения, схему 1068 задания направления вращения, схему 1069 регистрации углового положения ротора, схему 1075 регистрации частоты вращения и схему 1074 регистрации силы удара. Вычислительное устройство 1067 содержит центральный процессор (ЦП) для выдачи управляющих сигналов в результате обработки данных обрабатывающей программой, постоянное запоминающее устройство (ПЗУ) для хранения обрабатывающей программы или данных управления, оперативное запоминающее устройство (ОЗУ) для временного хранения данных, таймер и т.д., хотя эти элементы на чертеже не показаны. Вычислительное устройство 1067 формирует управляющий сигнал для попеременного переключения заданных переключающих элементов Q1001-Q1006 на основании выходных сигналов схемы 1068 задания направления вращения и схемы 1069 регистрации углового положения ротора и выдает управляющий сигнал в схему 1065 вывода управляющих сигналов. Это обеспечивает попеременную подачу электрической энергии на заданные обмоточные провода обмоток U, V и W статора и вращение ротора 1003А в заданном направлении вращения. В этом случае управляющие сигналы, подаваемые на переключающие элементы Q1004-Q1006, расположенные со стороны отрицательного полюса источника питания, выдаются в виде широтно-импульсно-модулированных (ШИМ) сигналов на основании выходного управляющего сигнала схемы 1070 задания подаваемого напряжения. Значение тока, подаваемого в двигатель 1003, измеряется схемой 1071 регистрации тока и регулируется в качестве заданной электрической энергии привода посредством обратной связи по току с вычислительным устройством 1067. ШИМ-сигналы могут подаваться и на переключающие элементы Q1001-Q1003, расположенные со стороны положительного полюса источника питания.
Импульсная резьбозавертывающая машина 1001 с электронным управлением имеет переключатель направления вращения (на чертеже не показан), предназначенный для переключения направления вращения ротора двигателя 1003 между нормальным и обратным направлениями. Когда схема 1068 задания направления вращения обнаруживает изменение положения переключателя направления вращения (на чертеже не показанного), направление вращения ротора двигателя 1003, она передает в вычислительное устройство 1067 управляющий сигнал на переключение направления вращения ротора двигателя. С блоком 1072 управления связан датчик 1073 силы удара, определяющий величину создаваемого в наковальне 1052 удара, и выходной сигнал этого датчика вводится в вычислительное устройство 1067 через схему 1074 регистрации силы удара.
На фиг.19 приведен вид в разрезе при взгляде на плоскость сечения в направлении III, обозначенном на фиг.17, и показаны взаимное положение и взаимодействие ударника 1042 и наковальни 1052 во время работы импульсной резьбозавертывающей машины 1001 с электронным управлением. На фиг.19(1) показано состояние, когда первый ведущий выступ 1042А и первый ведомый выступ 1052А входят в контакт друг с другом, и одновременно второй ведущий выступ 1042В и второй ведомый выступ 1052В входят в контакт друг с другом. Наружный диаметр RH3 первого ведущего выступа 1042А и наружный диаметр RA3 первого ведомого выступа 1052А равны друг другу. Из этого состояния ударник 1042 вращается в направлении по часовой стрелке, показанном на фиг.19, и переходит в состояние, показанное на фиг.19(2). Поскольку внутренний диаметр RH2 первого ведущего выступа 1042А больше наружного диаметра RA1 второго ведомого выступа 1052В, первый ведущий выступ 1042А и второй ведомый выступ 1052В не входят в контакт друг с другом. Аналогичным образом, поскольку наружный диаметр RH1 второго ведущего выступа 1042В меньше внутреннего диаметра RA2 первого ведомого выступа 1052А, второй ведущий выступ 1042В и первый ведомый выступ 1052А не входят в контакт друг с другом. Затем, когда ударник 1042 повернулся, дойдя до положения, показанного на фиг.19(3), двигатель 1003 реверсируется, т.е. начинает обратное вращение, и ударник 1042 вращается в направлении против часовой стрелки. В положении, показанном на фиг.19(3), ударник 1042 в результате указанного обратного вращения достиг максимально отведенного положения относительно наковальни 1052. Затем в результате нормального вращения ротора двигателя 1003 ударник 1042 поворачивается, как показано на фиг.19(5), проходя через состояние, показанное на фиг.19(4), таким образом, что первый ведущий выступ 1042А и первый ведомый выступ 1052А сталкиваются друг с другом, и одновременно второй ведущий выступ 1042В и второй ведомый выступ 1052В сталкиваются друг с другом. В результате удара ударника по наковальне в момент этого столкновения, как показано на фиг.19(6), наковальня 1052 поворачивается в направлении против часовой стрелки.
Как указано выше, два ведущих выступа, предусмотренных на ударнике 1042, сталкиваются с двумя ведомыми выступами, предусмотренными на наковальне 1052, в местах, симметричных относительно осевого центра вращения. Благодаря этому при нанесении ударов механизм хорошо уравновешен, и во время работы в ударном режиме импульсная резьбозавертывающая машина 1001 с электронным управлением практически не вибрирует.
Кроме того, поскольку внутренний диаметр RH2 первого ведущего выступа 1042А больше наружного диаметра RA1 второго ведомого выступа 1052В, а наружный диаметр RH1 второго ведущего выступа 1042В меньше внутреннего диаметра RA2 первого ведомого выступа 1052А, угол поворота ударника 1042 и наковальни 1052 относительно друг друга может превышать 180°. Это позволяет обеспечить достаточный угол обратного поворота ударника 1042 относительно наковальни 1052 и достаточное угловое расстояние для ускорения ударника.
Кроме того, первый ведущий выступ 1042А и второй ведущий выступ 1042В способны сталкиваться с первым ведомым выступом 1052А и вторым ведомым выступом 1052В с обеих сторон в окружном направлении. Таким образом, работа в ударном режиме возможна не только при нормальном вращении рабочего инструмента, но и при его обратном вращении. Это позволяет создать легкую в использовании импульсно-силовую ручную машину. Далее, при ударе ударника 1042 по наковальне 1052 последняя не испытывает удара в осевом направлении (вперед). Таким образом, предотвращается давление рабочего инструмента на заворачиваемый крепежный элемент, что является преимуществом при заворачивании в древесину шурупов или саморезов.
Далее со ссылкой на фиг.20-25 рассматриваются режимы работы, используемые в импульсной резьбозавертывающей машине с электронным управлением в рассматриваемом варианте ее выполнения. В рассматриваемом варианте импульсная резьбозавертывающая машина с электронным управлением имеет три режима работы, а именно режим сверления, режим электронной предохранительной муфты и импульсный режим.
Режим сверления представляет собой режим, в котором ударник 1042 и наковальня 1052 вращаются вместе, как единое целое, и используется преимущественно в случае заворачивания шурупов или саморезов. При этом поступающий в двигатель 1003 электрический ток нарастает по мере заворачивания, как это показано на фиг.20.
Режим электронной предохранительной муфты, показанный на фиг.21 и 22, представляет собой режим, предусматривающий останов двигателя 1003 в случае, если электрический ток, поступавший в двигатель 1003 в состоянии, когда ударник 1042 и наковальня 1052 вращались, как единое целое, увеличился до заданного значения (т.е. достигнут заданный крутящий момент), и этот режим используется преимущественно в случаях, когда крепежный элемент важно завернуть точно с заданным крутящим моментом затяжки, например, при заворачивании крепежных элементов, которые после затяжки видны снаружи. Кроме того, хотя это также описывается ниже, при работе ручной машины в режиме электронной предохранительной муфты предусмотрена возможность обратного вращения ротора двигателя 1003 для имитации проскальзывания предохранительной муфты, в обиходе называемой "трещоткой" и представляющей собой, в частности, пружинно-кулачковую или пружинно-шариковую муфту (после срабатывания электронной предохранительной муфты), а при заворачивании шурупа или самореза предусмотрена возможность обратного вращения ротора двигателя 1003 с целью предупреждения срыва шлица шурупа (см. фиг.22).
Импульсный режим, иллюстрируемый на фиг.23-25, предусматривает попеременное переключение двигателя 1003 между нормальным и обратным вращениями, т.е. чередование вращения ротора двигателя 1003 в направлениях нормального и обратного вращений, с переходом на заворачивание крепежного элемента ударами в случае, когда электрический ток, поступавший в двигатель 1003 в состоянии, когда ударник 1042 и наковальня 1052 вращались вместе, увеличился до заданного значения (достигнут заданный крутящий момент), причем импульсный режим преимущественно используется, например, при заворачивании длинного шурупа в месте, где головка шурупа не будет видна снаружи. Таким образом, обеспечивается высокая сила затяжки и одновременно уменьшение силы отдачи от затягиваемого крепежного элемента.
Далее описывается функционирование блока 1072 управления при выполнении предлагаемой в изобретении импульсной резьбозавертывающей машиной с электронным управлением работы по затягиванию крепежного элемента. При этом, поскольку в режиме сверления какие-либо особые операции управления не предусмотрены, описание режима сверления не приводится. Кроме того, в приведенном ниже описании при определении событий и управляющих воздействий на основании электрического тока не учитывается пусковой ток. Также не учитываются скачки значения электрического тока, имеющие место при подаче электрического тока для перевода двигателя на нормальное вращение. Этот связано с тем, например, что скачок значения электрического тока, возникающий при подаче тока нормального вращения, как это показано на фиг.22-25, не вносит вклада в заворачивание шурупа или болта. Исключить из учета такие скачки электрического тока можно, предусмотрев время нечувствительности, составляющее, например, около 20 мс.
Сначала, со ссылкой на фиг.21, 22 и 26, будет рассмотрен случай, когда в качестве режима работы ручной машины установлен режим электронной предохранительной муфты.
На фиг.21 показан процесс управления двигателем при работе резьбозавертывающей машины в режиме электронной предохранительной муфты для заворачивания крепежного элемента, такого как болт (в дальнейшем - болт), на фиг.22 показан процесс управления двигателем при работе резьбозавертывающей машины в режиме электронной предохранительной муфты для заворачивания крепежного элемента, такого как шуруп или саморез, а на фиг.26 приведена блок-схема, иллюстрирующая алгоритм управления двигателем при заворачивании крепежного элемента в режиме электронной предохранительной муфты.
Представленный на фиг.26 алгоритм начинается с нажатия на клавишу пускового выключателя, а завершается работа по заворачиванию крепежного элемента в режиме электронной предохранительной муфты, предусмотренном рассматриваемым вариантом осуществления изобретения, определением того, что достигнут заданный крутящий момент, на основании увеличения поступающего в двигатель 1003 электрического тока до заданного значения Т (см. фиг.21 и 22).
При нажатии на клавишу пускового выключателя блок 1072 управления сначала подает в двигатель 1003 напряжение обратного вращения для подготовки к работе и сопряжения рабочего инструмента с крепежным элементом (в частности вхождения жала насадки в шлиц головки шурупа), при этом ударник 1042 поворачивается в направлении обратного вращения и слегка сталкивается с наковальней 1052 (момент времени t1 на фиг.21 и 22 и шаг S1601 на фиг.26). В рассматриваемом варианте осуществления изобретения напряжение обратного вращения для подготовки к работе задано равным 5,5 В, а длительность подачи напряжения обратного вращения для подготовки к работе задана равной 200 мс. Это позволяет обеспечить надежное сцепление между крепежным элементом и рабочим инструментом.
После нажатия на клавишу пускового выключателя ударник 1042 и наковальня 1052 могут отделиться друг от друга. В этом состоянии, когда в двигатель 1003 течет электрический ток, ударник 1042 бьет по наковальне 1052. Между тем, в режиме электронной предохранительной муфты подача тока в двигатель 1003 прекращается при повышении поступающего в двигатель 1003 электрического тока до заданного значения (достижении заданного крутящего момента) в том случае, если ударник 1042 и наковальня 1052 вращаются вместе, как единое целое. В случае же, когда по наковальне 1052 может быть нанесен удар, момент, превышающий заданное значение, может быть приложен к крепежному элементу просто за счет нанесения удара. Подобная проблема становится особенно выраженной при выполнении усиленного затягивания или дотяжки ранее затянутого шурупа или иного аналогичного крепежного элемента.
Соответственно, в режиме электронной предохранительной муфты, после выполнения шага S1601, в двигатель 1003 в течение первого периода времени подается напряжение нормального вращения для плавного пуска с целью приведения ударника 1042 в контакт с наковальней 1052 без вращения наковальни 1052 (плавный пуск) (отрезок времени t2 на фиг.21 и 22 и шаг S1602 на фиг.26). В рассматриваемом варианте осуществления изобретения напряжение нормального вращения для плавного пуска задано равным 1,5 В, а длительность подачи напряжения нормального вращения для плавного пуска задана равной 800 мс. Дополнительно, в рассматриваемом варианте осуществления изобретения существует возможность расхождения ударника 1042 и наковальни 1052 друг от друга примерно на 315°. Таким образом, вышеупомянутый первый период времени задается с таким расчетом, чтобы двигатель 1003 при подаче на него напряжения нормального вращения для плавного пуска повернул ударник 1042 на 315°.
Затем в двигатель 1003 подается напряжение нормального вращения для заворачивания крепежного элемента (момент времени t3 на фиг.21 и 22 и шаг S1603 на фиг.26), и определяется, превысил ли электрический ток, поступающий в двигатель 1003, пороговое значение а (шаг S1604). В рассматриваемом варианте осуществления изобретения напряжение нормального вращения для заворачивания задано равным 14,4 В, а пороговое значение а представляет собой значение тока на заключительной стадии заворачивания шурупа или самореза, находящееся в диапазоне, при котором проворачивания шурупа или срыва его шлица не происходит, и в рассматриваемом варианте осуществления изобретения это значение задано равным 15 А.
Если поступающий в двигатель 1003 электрический ток больше порогового значения а (момент времени t4 на фиг.21 и фиг.22 и шаг S1604: "да" на фиг.26), то определяется, превышает ли скорость увеличения электрического тока пороговое значение b (шаг S1605). Скорость увеличения электрического тока может быть вычислена, например, согласно выражению: (A(Tr+t)-A(Tr))/A(Tr), как в случае фиг.21. В этом выражении переменная t представляет время, прошедшее с определенного момента времени Tr. Кроме того, скорость увеличения электрического тока может быть вычислена согласно выражению: (A(N+1)-A(N))/A(N), как в случае фиг.22. В данном выражении N - это максимальное значение электрического тока при подаче определенного импульса тока нормального вращения, a N+1 - максимальное значение электрического тока при подаче следующего импульса тока нормального вращения. Например, в случае фиг.22, пороговое значение b, определенное по выражению (A(N+1)-A(N))/A(N), задано равным 20%.
Обычно при заворачивании болта, как показано на фиг.21, поступающий в двигатель 1003 электрический ток резко увеличивается на заключительной стадии заворачивания. В отличие от работы с болтами в случае заворачивания шурупа или самореза, как показано на фиг.22, электрический ток увеличивается постепенно.
Соответственно, если при превышении поступающим в двигатель 1003 электрическим током порогового значения а скорость увеличения электрического тока была больше порогового значения b, блок 1072 управления определяет, что крепежным элементом является болт, а если в этом случае скорость увеличения электрического тока была меньше или равна пороговому значению b, блок управления определяет, что крепежным элементом является шуруп или саморез.
В случае, когда скорость увеличения электрического тока больше порогового значения b, крепежный элемент представляет собой болт, шпильку и т.п., в отношении которого можно не учитывать возможность срыва шлица. Таким образом, когда значение электрического тока впоследствии увеличилось до заданного значения Т (момент времени t5 на фиг.21 и шаг S1606: "да" на фиг.26), приложение крутящего момента к болту прекращается. Однако, как указано выше, в случае заворачивания болта электрический ток при его затяжке резко увеличивается. Таким образом, если просто прервать подачу напряжения нормального вращения, на болт может по-прежнему действовать крутящий момент, обусловленный силой инерции. Поэтому в рассматриваемом варианте осуществления изобретения с целью прекращения приложения к болту крутящего момента в двигатель 1003 для его торможения подается напряжение обратного вращения (момент времени t5 на фиг.21 и шаг S1607 на фиг.26). В рассматриваемом варианте осуществления изобретения длительность подачи напряжения обратного вращения для торможения задана равной 5 мс.
Затем для имитации проскальзывания предохранительной муфты (срабатывания "трещотки") в двигатель 1003 попеременно подается напряжение нормального вращения и напряжение обратного вращения (отрезок времени t7 на фиг.21 и 22 и шаг S1608 на фиг.26). В рассматриваемом варианте осуществления изобретения длительность подачи напряжения нормального вращения и напряжения обратного вращения для имитации проскальзывания предохранительной муфты задана равной 1000 мс (одна секунда). Имитация проскальзывания предохранительной муфты означает в данном случае, что при достижении требуемого крутящего момента, определяемого по заданному значению тока, эта имитация предусмотрена как функция сообщения оператору о вышеупомянутом событии. Хотя двигатель фактически работать не перестал, его работа в режиме имитации проскальзывания предохранительной муфты служит средством сообщения оператору о том, что работа двигателя по заворачиванию крепежного элемента остановлена.
Когда в режиме имитации проскальзывания предохранительной муфты в двигатель подается напряжение обратного вращения, ударник 1042 отделяется от наковальни 1052, а когда в режиме имитации проскальзывания предохранительной муфты подается напряжение нормального вращения, ударник 1042 ударяет по наковальне 1052. Однако напряжение нормального вращения и напряжение обратного вращения в режиме имитации проскальзывания предохранительной муфты задано таким (например, равным 2 В), что усилие заворачивания к крепежному элементу не прикладывается, а раздается лишь звук ударов. Благодаря такой имитации проскальзывания предохранительной муфты пользователь может определить, что заворачивание крепежного элемента завершилось.
С другой стороны, поскольку в случае, если скорость увеличения электрического тока меньше или равна пороговому значению b, крепежным элементом является шуруп или саморез, в отношении которого необходимо учитывать возможность срыва шлица, то затем в двигатель 1003 с заданными интервалами относительно моментов подачи напряжения на заворачивание подаются импульсы напряжения обратного вращения для предупреждения срыва шлица (момент времени t5 на фиг.22 и шаг S1609a на фиг.26). Возможность срыва шлица шурупа или самореза связана с тем, что при нарушении плотной посадки крестового жала рабочего инструмента (насадки) в крестовом шлице, имеющемся в головке шурупа или самореза, это крестовое жало будет нагружать крестовый шлиц шурупа неравномерно, вследствие чего крестовый шлиц может сорваться. За счет подачи импульсов напряжения обратного вращения наковальня поворачивается в направлении обратного вращения для предупреждения срыва шлица. Благодаря обратному вращению наковальни крестовое жало присоединенного к наковальне рабочего инструмента и крестовый шлиц шурупа или самореза плотно сопрягаются друг с другом. При этом напряжение обратного вращения для предупреждения срыва шлица подается не с целью увеличения пути ускорения для ударника 1042 для его удара по наковальне 1052, а для сообщения наковальне 1052 ударником 1042 обратного вращения в такой степени, чтобы наковальня 1052 приложила к шурупу крутящий момент обратного вращения. В рассматриваемом варианте осуществления изобретения напряжение обратного вращения для предупреждения срыва шлица задано равным 14,4 В.
Затем, когда электрический ток увеличился до заданного значения Т (момент времени t6 на фиг.22 и шаг S1610a: "да" на фиг.26), в двигатель 1003 попеременно подаются напряжение нормального вращения и напряжение обратного вращения для имитации проскальзывания предохранительной муфты (ниже именуемые напряжениями для имитации проскальзывания предохранительной муфты), в результате чего двигатель начинает работать в режиме имитации проскальзывания предохранительной муфты (момент времени t7 на фиг.22 и шаг S1608 на фиг.26), что указывает пользователю на завершение заворачивания крепежного элемента.
Наконец, по истечении заданного времени (шаг S1609: да) с момента подачи напряжения для имитации проскальзывания предохранительной муфты (шаг S1610) подача указанного напряжения прекращается.
Далее со ссылкой на фиг.23-25 и фиг.27 рассматривается случай перевода работы двигателя в импульсный режим.
На фиг.23 иллюстрируется процесс управления двигателем при заворачивании болта в импульсном режиме, на фиг.24 иллюстрируется процесс управления двигателем в случае, если при заворачивании шурупа или самореза в импульсном режиме переключение во второй импульсный режим, который описывается ниже, не осуществляется, на фиг.25 иллюстрируется процесс управления двигателем в случае, если при заворачивании шурупа или самореза в импульсном режиме переключение во второй импульсный режим, который описывается ниже, осуществляется, а на фиг.27 представлена блок-схема алгоритма управления двигателем при заворачивании крепежного элемента в импульсном режиме.
Кроме того, алгоритм управления на показанной на фиг.27 блок-схеме также запускается нажатием на клавишу пускового выключателя аналогично тому, как это предусмотрено в режиме электронной предохранительной муфты.
При нажатии клавиши пускового выключателя блок 1072 управления сначала подает в двигатель 1003 напряжение обратного вращения для сопряжения рабочего инструмента с крепежным элементом аналогично управлению в режиме электронной предохранительной муфты (момент времени t1 на фиг.23-25 и шаг S1701 на фиг.27). С другой стороны, в импульсном режиме точности крутящего момента не придается большого значения. Поэтому в импульсном режиме шаг алгоритма, эквивалентный шагу S1602 (плавный пуск) в режиме электронной предохранительной муфты, пропускается.
Затем подается то же напряжение нормального вращения для заворачивания крепежного элемента, что и в режиме электронной предохранительной муфты (момент времени t2 на фиг.23-25 и шаг S1702 на фиг.27), и определяется, превысил ли поступающий в двигатель 1003 электрический ток пороговое значение с (шаг S1703).
В рассматриваемом случае, когда крепежным элементом является шуруп или саморез, нагрузка (электрический ток) увеличивается от момента начала заворачивания постепенно. В случае же болта нагрузка повышается слегка лишь в начале заворачивания и возрастает резко при достижении определенной степени заворачивания. Поведение прикладываемой нагрузки в случае болта таково, что сила реакции, воспринимаемая со стороны крепежных элементов, образующих резьбовую пару, становится больше, чем сила противодействия, воспринимаемая со стороны заворачиваемого элемента в случае шурупа или самореза. Соответственно, в случае болта со стороны образующих резьбовую пару крепежных элементов воспринимается сила, помогающая напряжению обратного вращения. Таким образом, когда в двигатель 1003 подается напряжение обратного вращения для поворота крепежного элемента на выворачивание, в двигатель 1003 течет ток обратного вращения, абсолютное значение которого меньше, чем в случае шурупа или самореза. В рассматриваемом варианте осуществления изобретения, когда речь идет о болте, для электрического тока вблизи начала увеличения нагрузки задано пороговое значение с (составляющее, например, 15 А).
Если поступающий в двигатель 1003 электрический ток превысил это пороговое значение с, в двигатель 1003 подается напряжение обратного вращения (момент времени t3 на фиг.23-25 и шаг S1704 на фиг.27) для распознавания вида крепежного элемента. Значение напряжения обратного вращения для распознавания вида крепежного элемента задается с таким расчетом (например, 14,4 В), чтобы при повороте в направлении обратного вращения ударник 1042 не ударял по наковальне 1052.
Затем блок 1072 управления определяет, превышает ли абсолютное значение электрического тока, поступающего в двигатель 1003 при подаче напряжения обратного вращения для распознавания вида крепежного элемента, пороговое значение d (шаг S1705), и если абсолютное значение электрического тока больше порогового значения d (фиг.24 и 25), блок управления делает вывод, что заворачиваемым крепежным элементом является шуруп или саморез, а если абсолютное значение электрического тока меньше или равно пороговому значению d (фиг.23), блок управления делает вывод, что заворачиваемым крепежным элементом является болт, и управляет двигателем 1003 таким образом, чтобы осуществлять заворачивание ударами в соответствии с распознанным видом крепежного элемента. В рассматриваемом варианте осуществления изобретения пороговое значение d задано равным 20 А.
В частности, заворачивание крепежного элемента ударами выполняется путем чередования подачи в двигатель 1003 напряжения нормального вращения и напряжения обратного вращения. Вместе с тем в рассматриваемом варианте осуществления изобретения напряжение нормального вращения и напряжение обратного вращения подаются в двигатель 1003 попеременно таким образом, чтобы отношение периода времени, в течение которого подается напряжение обратного вращения (ниже именуемого периодом обратного вращения), к периоду времени, в течение которого подается напряжение нормального вращения (ниже именуемому периодом нормального вращения), увеличивалось пропорционально величине нагрузки.
Кроме того, в случае если заворачивание за счет нажима на крепежный элемент становится трудным, обычно осуществляется переход на заворачивание ударами. Однако с точки зрения удобства для пользователя предпочтительно, чтобы этот переход проходил постепенно. Соответственно, в рассматриваемом варианте осуществления изобретения в первом импульсном режиме выполняется заворачивание ударами, преимущественно использующее усилие нажима, а во втором импульсном режиме выполняется заворачивание ударами, преимущественно использующее силу ударов.
В частности, в первом импульсном режиме к крепежному элементу в течение длительного периода нормального вращения прикладывается усилие нажима. С другой стороны, во втором импульсном режиме по мере увеличения нагрузки постепенно увеличивается период обратного вращения, а энергия ударов прикладывается при постепенном сокращении периода нормального вращения. Кроме того, в рассматриваемом варианте осуществления изобретения в первом импульсном режиме с целью уменьшения силы противодействия со стороны заворачиваемого элемента период нормального вращения постепенно сокращается, тогда как период обратного вращения с увеличением нагрузки остается постоянным.
Возвращаясь к блок-схеме на фиг.27, на ней поясняется переключение в первый импульсный режим и во второй импульсный режим.
Сначала рассматривается переключение в первый импульсный режим и во второй импульсный режим, если абсолютное значение поступающего в двигатель 1003 электрического тока больше порогового значения d (шаг S1705: да), т.е. если заворачиваемым крепежным элементом является шуруп или саморез.
В этом случае блок 1072 управления сначала подает в двигатель 1003 напряжение для работы в первом импульсном режиме, т.е. заворачивание ударами с преимущественным использованием усилия нажима (момент времени t5 на фиг.24 и 25 и шаги S1706a-S1706c на фиг.27). В частности, подача напряжения в двигатель 1003 (шаг S1706a) выполняется по следующей схеме: пауза (5 мс)→напряжение обратного вращения (15 мс)→пауза (5 мс)→напряжение нормального вращения (300 мс), образующей один цикл. По истечении заданного времени подача напряжения в двигатель 1003 (шаг S1706b) выполняется по следующей схеме: пауза (5 мс)→напряжение обратного вращения (15 мс)→пауза (5 мс)→напряжение нормального вращения (200 мс), образующей один цикл. Далее, по истечении заданного времени подача напряжения в двигатель 1003 (шаг S1706c) выполняется по следующей схеме: пауза (5 мс)→напряжение обратного вращения (15 мс)→пауза (5 мс)→напряжение нормального вращения (100 мс), образующей один цикл.
Затем блок 1072 управления определяет, превышает ли электрический ток, поступающий в двигатель 1003 при подаче напряжения для работы в первом импульсном режиме, пороговое значение е (шаг S1707). Пороговое значение е предусмотрено для распознавания необходимости переключения во второй импульсный режим и в рассматриваемом варианте осуществления изобретения задано равным 75 А.
Если электрический ток, поступающий в двигатель 1003 при подаче напряжения (напряжения нормального вращения) для работы в первом импульсном режиме, меньше или равен пороговому значению е (шаг S1707: нет), шаги S1706a-S1706c и S1707 повторяются. Кроме того, при увеличении количества раз (циклов) подачи напряжения для работы в первом импульсном режиме нагрузка возрастает, и сила противодействия со стороны заворачиваемого элемента увеличивается. Поэтому для уменьшения силы противодействия со стороны заворачиваемого элемента напряжение для работы в первом импульсном режиме подается таким образом, чтобы период нормального вращения постепенно уменьшался, а период обратного вращения оставался постоянным. В рассматриваемом варианте осуществления изобретения период нормального вращения уменьшается дискретно по схеме: 300 мс→200 мс→100 мс.
Если же электрический ток, поступающий в двигатель 1003 при подаче напряжения (напряжения нормального вращения) для работы в первом импульсном режиме, стал больше порогового значения е (момент времени t6 на фиг.24 и 25 и шаг S1707: "да" на фиг.27), сначала определяется, превышает ли скорость увеличения электрического тока, вызванного подачей напряжения для работы в первом импульсном режиме (напряжения нормального вращения), пороговое значение f (шаг S1708). Пороговое значение f предусмотрено для определения того, сел ли шуруп или саморез головкой на материал основы, и в рассматриваемом варианте осуществления изобретения задано равным 4%.
Если скорость увеличения электрического тока больше порогового значения f (шаг S1708: да на фиг.24 и 27), шуруп или саморез считается севшим головкой на материал основы до упора. Таким образом, для уменьшения последующей силы противодействия в двигатель 1003 подается напряжение для посадки шурупа или самореза (момент времени t11 на фиг.24 и шаг S1709 на фиг.27). Кроме того, в рассматриваемом варианте осуществления изобретения подача напряжения для посадки повторяется по следующей схеме: пауза (5 мс)→напряжение обратного вращения (15 мс)→пауза (5 мс)→напряжение нормального вращения (40 мс), образующей один цикл.
С другой стороны, если скорость увеличения электрического тока меньше или равна пороговому значению f (шаг S1708: нет), это означает высокую нагрузку, несмотря на то, что шуруп или саморез еще не посажен. Поэтому усилие заворачивания, преимущественно обусловленное усилием нажима и создаваемое напряжением, подаваемым для работы в первом импульсном режиме, рассматривается как недостаточное. Соответственно, после этого будет выполнено переключение во второй импульсный режим.
В рассматриваемом варианте осуществления изобретения второй импульсный режим включает в себя пять подрежимов (подрежимы 1-5) с соответственно пятью разными напряжениями (напряжения 1-5), предназначенными для работы во втором импульсном режиме. Что касается напряжений 1-5 для работы во втором импульсном режиме, в этом порядке (от первого к пятому) период обратного вращения увеличивается, а период нормального вращения уменьшается. В частности, один цикл: пауза (5 мс)→напряжение обратного вращения (15 мс)→пауза (5 мс)→напряжение нормального вращения (75 мс) выполняется при первом напряжении для работы во втором импульсном режиме, один цикл: пауза (7 мс)→напряжение обратного вращения (18 мс)→пауза (10 мс)→напряжение нормального вращения (65 мс) выполняется при втором напряжении для работы во втором импульсном режиме, один цикл: пауза (9 мс)→напряжение обратного вращения (20 мс)→пауза (12 мс)→напряжение нормального вращения (59 мс) выполняется при третьем напряжении для работы во втором импульсном режиме, один цикл: пауза (11 мс)→напряжение обратного вращения (23 мс)→пауза (13 мс)→напряжение нормального вращения (53 мс) выполняется при четвертом напряжении для работы во втором импульсном режиме, и один цикл: пауза (15 мс)→напряжение обратного вращения (25 мс)→пауза (15 мс)→напряжение нормального вращения (45 мс) выполняется при пятом напряжении для работы во втором импульсном режиме.
Если на шаге S1708 (шаг S1708: нет) определена необходимость переключения во второй импульсный режим, сначала определяется, превышает ли электрический ток, поступающий в двигатель 1003 при подаче напряжения нормального вращения, относящегося к напряжению для работы в первом импульсном режиме (во время падения), пороговое значение g1 (шаг S1710). Пороговое значение g1 предусмотрено для определения того, должно ли в двигатель 1003 подаваться напряжение для работы во втором импульсном режиме, более высокое, чем первое напряжение для работы во втором импульсном режиме, и в рассматриваемом варианте осуществления изобретения это пороговое значение задано равным 76 А. Кроме того, ниже по тексту электрический ток, поступающий в двигатель 1003 при подаче напряжения нормального вращения, относящегося к каждому напряжению, предусмотренному для работы в импульсном режиме, единообразно именуется опорным током.
Если опорный ток больше порогового значения g1 (шаг S1710: да), то определяется, превышает ли электрический ток пороговое значение g2 (шаг S1711). Пороговое значение g2 предусмотрено для определения того, должно ли в двигатель 1003 подаваться напряжение для работы во втором импульсном режиме, более высокое, чем второе напряжение для работы во втором импульсном режиме, и в рассматриваемом варианте осуществления изобретения это пороговое значение задано равным 77 А.
Если электрический ток больше порогового значения g2 (шаг S1711: да), то определяется, превышает ли электрический ток пороговое значение g3 (шаг 51712). Пороговое значение g3 предусмотрено для определения того, должно ли в двигатель 1003 подаваться напряжение для работы во втором импульсном режиме, более высокое, чем третье напряжение для работы во втором импульсном режиме, и в рассматриваемом варианте осуществления изобретения это пороговое значение задано равным 79 А.
Если электрический ток больше порогового значения g3 (шаг S1712: да), то определяется, превышает ли электрический ток пороговое значение g4 (шаг S1713). Пороговое значение g4 предусмотрено для определения того, должно ли в двигатель 1003 подаваться напряжение для работы во втором импульсном режиме, более высокое, чем четвертое напряжение для работы во втором импульсном режиме, и в рассматриваемом варианте осуществления изобретения это пороговое значение задано равным 80 А.
Итак, описанным выше образом на основании электрического тока, поступающего в двигатель 1003 при подаче напряжения (напряжения нормального вращения) для работы в первом импульсном режиме, сначала определяется, какое именно напряжение для работы во втором импульсном режиме должно подаваться в двигатель 1003, и затем в двигатель 1003 подается это определенное напряжение для работы во втором импульсном режиме.
В частности, если электрический ток меньше или равен пороговому значению g1 (шаг S1710: нет), в двигатель 1003 подается первое напряжение для работы во втором импульсном режиме (шаг S1714); если электрический ток больше порогового значения g1 и меньше или равен пороговому значению g2 (шаг S1711: нет), в двигатель 1003 подается второе напряжение для работы во втором импульсном режиме (шаг S1715); если электрический ток больше порогового значения g2 и меньше или равен пороговому значению g3 (шаг S1712: нет), в двигатель 1003 подается третье напряжение для работы во втором импульсном режиме (шаг S1716); если электрический ток больше порогового значения g3 и меньше или равен пороговому значению g4 (шаг S1713: нет), в двигатель 1003 подается четвертое напряжение для работы во втором импульсном режиме (шаг S1717); и если электрический ток больше порогового значения g4 (шаг S1713: да), в двигатель 1003 подается пятое напряжение для работы во втором импульсном режиме (шаг S1718).
После подачи (шаг S1714) первого напряжения для работы во втором импульсном режиме затем определяется, превышает ли электрический ток, поступающий в двигатель 1003 при подаче первого напряжения (напряжения нормального вращения) для работы во втором импульсном режиме, пороговое значение g1 (шаг S1719).
Если электрический ток меньше или равен пороговому значению g1 (шаг S1719: нет), выполнение алгоритма возвращается к шагу S1707, на котором снова определяется, какое из двух напряжений: напряжения для работы в первом импульсном режиме и первого напряжения для работы во втором импульсном режиме, должно подаваться в двигатель 1003. Если же электрический ток больше порогового значения g1 (шаг S1719: да), в двигатель 1003 подается второе напряжение для работы во втором импульсном режиме (шаг S1715).
После подачи (шаг S1715) второго напряжения для работы во втором импульсном режиме затем определяется, превышает ли электрический ток, поступающий в двигатель 1003 при подаче второго напряжения (напряжения нормального вращения) для работы во втором импульсном режиме, пороговое значение g2 (шаг S1720).
Если электрический ток меньше или равен пороговому значению g2 (шаг S1720: нет), выполнение алгоритма возвращается к шагу S1710, на котором снова определяется, какое из двух напряжений: первого и второго напряжений для работы во втором импульсном режиме, должно подаваться в двигатель 1003. Если же электрический ток больше порогового значения g2 (шаг S1720: да), в двигатель 1003 подается третье напряжение для работы во втором импульсном режиме (шаг S1716).
После подачи (шаг S1716) третьего напряжения для работы во втором импульсном режиме затем определяется, превышает ли электрический ток, поступающий в двигатель 1003 при подаче третьего напряжения (напряжения нормального вращения) для работы во втором импульсном режиме, пороговое значение g3 (шаг S1721).
Если электрический ток меньше или равен пороговому значению g3 (шаг S1721: нет), выполнение алгоритма возвращается к шагу S1711, на котором снова определяется, какое из двух напряжений: второго и третьего напряжений для работы во втором импульсном режиме, должно подаваться в двигатель 1003. Если электрический ток больше порогового значения g3 (шаг S1721: да), в двигатель 1003 подается четвертое напряжение для работы во втором импульсном режиме (шаг S1717).
После подачи (шаг S1717) четвертого напряжения для работы во втором импульсном режиме затем определяется, превышает ли электрический ток, поступающий в двигатель 1003 при подаче четвертого напряжения (напряжения нормального вращения) для работы во втором импульсном режиме, пороговое значение g4 (шаг S1722).
Если электрический ток меньше или равен пороговому значению g4 (шаг S1722: нет), выполнение алгоритма возвращается к шагу S1712, на котором снова определяется, какое из двух напряжений: третьего и четвертого напряжений для работы во втором импульсном режиме, должно подаваться в двигатель 1003. Если электрический ток больше порогового значения g4 (шаг S1722: да), в двигатель 1003 подается пятое напряжение для работы во втором импульсном режиме (шаг S1718).
После подачи (шаг S1718) пятого напряжения для работы во втором импульсном режиме затем определяется, превышает ли электрический ток, поступающий в двигатель 1003 при подаче пятого напряжения (напряжения нормального вращения) для работы во втором импульсном режиме, пороговое значение g5 (шаг S1723). Пороговое значение g5 предусмотрено для определения того, должно ли в двигатель 1003 подаваться пятое напряжение для работы во втором импульсном режиме, и в рассматриваемом варианте осуществления изобретения это пороговое значение задано равным 82 А.
Если электрический ток меньше или равен пороговому значению g5 (шаг S1723: нет), выполнение алгоритма возвращается к шагу S1713, на котором снова определяется, какое из двух напряжений: четвертого и пятого напряжений для работы во втором импульсном режиме, должно подаваться в двигатель 1003. Если электрический ток больше порогового значения g5 (шаг S1723: да), в двигатель подается пятое напряжение для работы во втором импульсном режиме 1003 (шаг S1718).
С другой стороны, если абсолютное значение поступающего в двигатель 1003 электрического тока меньше или равно пороговому значению d (шаг S1705: нет), т.е. если заворачиваемым крепежным элементом является болт, то при затягивании предпочтительно не требуется прикладывать усилие нажима, а нанесение ударов предпочтительно осуществлять в режиме, в котором сила противодействия (сопротивления) заворачиванию максимально уменьшена. Соответственно, в этом случае в двигатель 1003 подается сразу пятое напряжение для работы во втором импульсном режиме без прохождения через первый импульсный режим и подачи напряжений с первого по четвертое для работы во втором импульсном режиме (шаг S1718).
Таким образом, в импульсной резьбозавертывающей машине с электронным управлением при работе в импульсном режиме, соответствующем рассматриваемому варианту осуществления изобретения, с увеличением поступающего в двигатель 1003 электрического тока (нагрузки) отношение периода обратного вращения к периоду нормального вращения увеличивается (уменьшение периода нормального вращения в первом импульсном режиме (шаг S1706 на фиг.27), переключение из первого импульсного режима во второй импульсный режим (шаг S1707 на фиг.27) и переключение между пятью напряжениями второго импульсного режима (шаги S1719-S1722 на фиг.27)). Соответственно, это позволяет уменьшить силу противодействия заворачиванию со стороны элемента, в который заворачивается крепежный элемент, и создать удобную в использовании ручную импульсно-силовую машину.
Кроме того, в импульсной резьбозавертывающей машине 1001 с электронным управлением при работе в импульсном режиме, соответствующем рассматриваемому варианту осуществления изобретения, заворачивание выполняется в первом импульсном режиме, преимущественно использующем усилие нажима, если при заворачивании шурупа или самореза поступающий в двигатель 1003 электрический ток меньше или равен пороговому значению е. Соответственно, если электрический ток больше порогового значения е, заворачивание выполняется во втором импульсном режиме, преимущественно использующем энергию ударов (шаг S1707 на фиг.27). Таким образом, изобретение позволяет выполнять заворачивание в режиме, наиболее подходящем для шурупа или самореза.
Кроме того, в импульсной резьбозавертывающей машине 1001 с электронным управлением при работе в импульсном режиме, соответствующем рассматриваемому варианту осуществления изобретения, в двигатель 1003 подается напряжение обратного вращения для распознавания вида крепежного элемента (шаг S1704 на фиг.27). Если в этом случае электрический ток, поступающий в двигатель 1003, больше порогового значения d, крепежный элемент идентифицируется как шуруп или саморез, а если электрический ток меньше порогового значения d, крепежный элемент идентифицируется как болт. При этом выполнение алгоритма переходит на режимы, подходящие для соответствующих случаев, т.е. видов крепежных элементов (шаг S1705 на фиг.27). Таким образом, изобретение позволяет выполнять заворачивание оптимальным образом, в соответствии с видом крепежных элементов.
Кроме того, в импульсной резьбозавертывающей машине 1001 с электронным управлением при работе в импульсном режиме, соответствующем рассматриваемому варианту осуществления изобретения, если скорость увеличения электрического тока при увеличении самого электрического тока, поступающего в двигатель 1003, до порогового значения е, больше или равна пороговому значению f (шаг S1708: "да" на фиг.27), шуруп или саморез считается севшим головкой на материал основы, и в двигатель 1003 подается напряжение для посадки (затяжки) при сокращении цикла переключения электрической энергии нормального вращения и электрической энергии обратного вращения. Это позволяет уменьшить возникающую затем силу противодействия со стороны элемента, в который заворачивается крепежный элемент, и вместе с тем тактильные ощущения оператора при работе ручной машины будут такими же, что и в случае обычной импульсной резьбозавертывающей машины с электронным управлением, у которой интервал нанесения ударов сокращается по мере заворачивания крепежного элемента.
Кроме того, в импульсной резьбозавертывающей машине 1001 с электронным управлением при работе в импульсном режиме, соответствующем рассматриваемому варианту осуществления изобретения, предусмотрено переключение из первого импульсного режима в оптимальный второй импульсный режим в соответствии с поступающим в двигатель 1003 электрическим током (шаги S1710-S1713 на фиг.27). Таким образом, даже если электрический ток, поступающий в двигатель 1003, резко увеличился, изобретение позволяет выполнять заворачивание в подходящем ударном режиме.
Кроме того, в импульсной резьбозавертывающей машине с электронным управлением при работе в импульсном режиме, соответствующем рассматриваемому варианту осуществления изобретения, переключение подрежимов 1-5 во втором импульсном режиме возможно только между подрежимами, где циклы включения нормального вращения и обратного вращения соседствуют во времени друг с другом (шаги S1719-S1723 на фиг.27). Таким образом, изобретение позволяет предотвратить резкое изменение тактильных ощущений оператора.
Кроме того, в импульсной резьбозавертывающей машине 1001 с электронным управлением в рассматриваемом варианте осуществления изобретения до подачи напряжения нормального вращения для заворачивания крепежного элемента ударник 1042 поворачивается в направлении обратного вращения, путем подачи в двигатель напряжения обратного вращения, и ударяет по наковальне 1052 для сопряжения рабочего инструмента с крепежным элементом в двигатель 1003 (шаг S 1601 на фиг.26). Таким образом, даже если сопряжение между крепежным элементом и рабочим инструментом недостаточно, крепежный элемент и рабочий инструмент могут быть плотно пригнаны друг к другу, что позволяет предотвратить срыв рабочего инструмента с крепежного элемента во время работы.
Кроме того, в импульсной резьбозавертывающей машине 1001 с электронным управлением в режиме электронной предохранительной муфты, предусмотренном рассматриваемым вариантом осуществления изобретения, до подачи напряжения нормального вращения для заворачивания крепежного элемента ударник 1042 и наковальня 1052 приводятся в контакт друг с другом путем подачи напряжения нормального вращения для плавного пуска (шаг S1601 на фиг.26 и шаг S1701 на фиг.27). Таким образом, изобретение позволяет предотвратить приложение к крепежному элементу вследствие удара крутящего момента, превышающего заданный крутящий момент.
Кроме того, в импульсной резьбозавертывающей машине 1001 с электронным управлением в режиме электронной предохранительной муфты, предусмотренном рассматриваемым вариантом осуществления изобретения, имитация проскальзывания предохранительной муфты прекращается по истечении заданного времени с момента ее начала (шаги S1609 и S1610 на фиг.26). Таким образом, изобретение позволяет уменьшить потребление энергии и повышение температуры.
Кроме того, в импульсной резьбозавертывающей машине 1001 с электронным управлением, предусмотренной рассматриваемым вариантом осуществления изобретения, после затяжки болта и достижения заданного крутящего момента в двигатель 1003 подается напряжение обратного вращения для торможения (шаг S1607 на фиг.26). Таким образом, даже если крепежный элемент, такой как болт, при заворачивании которого крутящий момент резко увеличивается непосредственно перед достижением заданного крутящего момента затяжки, изобретение позволяет предотвратить создание крутящего момента, обусловленного силой инерции, и обеспечивает приложение точно заданного крутящего момента.
Далее со ссылкой на фиг.28 и 29 рассматривается импульсная резьбозавертывающая машина 1201 с электронным управлением, соответствующая четвертому варианту осуществления изобретения.
В третьем варианте осуществления изобретения предусматривается изменение параметров ударно-вращательного режима при увеличении электрического тока или иного аналогичного показателя до определенного порогового значения, но без учета изменения температуры. Однако, например, поскольку в холодных условиях вязкость смазки в редукторе 1041 низка, поступающий в двигатель 1003 электрический ток возрастает по сравнению с обычными условиями. В этом случае электрический ток, поступающий в двигатель 1003, может превысить пороговое значение, и параметры ударно-вращательного режима могут изменяться самопроизвольно, независимо от законов их регулирования.
Соответственно, рассматриваемый вариант осуществления изобретения характеризуется изменением порогового значения с учетом изменения температуры. В частности, на монтажной плате 1063 предусмотрен датчик температуры, а блок 1072 управления изменяет каждое пороговое значение на основании температуры, регистрируемой датчиком температуры.
На фиг.28 иллюстрируется изменение порогового значения при заворачивании шурупа или самореза в режиме электронной предохранительной муфты, а на фиг.29 иллюстрируется изменение порогового значения при заворачивании шурупа или самореза в импульсном режиме.
Блок 1072 управления, например, как показано на фиг.28, устанавливает пороговое значение а' тока и заданное значение Т' тока, достижение которых инициирует подачу напряжения обратного вращения для предупреждения срыва шлица при низкой температуре, более высокими по сравнению с пороговым значением а тока и заданным значением Т тока, достижение которых инициирует подачу напряжения обратного вращения для предупреждения срыва шлица при комнатной температуре, и, как показано на фиг.29, устанавливает пороговое значение с' для переключения в первый импульсный режим и пороговое значение е' для переключения во второй импульсный режим при низкой температуре более высокими, чем пороговое значение с для переключения в первый импульсный режим и пороговое значение е для переключения во второй импульсный режим при комнатной температуре.
Изменяя таким образом пороговое значение с учетом изменения температуры, можно изменять параметры ударно-вращательного режима в соответствующей ситуации. Кроме того, изменять можно не только вышеупомянутое пороговое значение, но и любые другие пороговые значения, Кроме того, датчик температуры может располагаться и в иных местах, нежели у двигателя 1003.
Далее со ссылкой на фиг.14 рассматривается импульсная резьбозавертывающая машина 1301 с электронным управлением, соответствующая пятому варианту осуществления изобретения.
В четвертом варианте осуществления изобретения упор делается на удобство работы ручной машины, для чего изменяется пороговое значение тока. В рассматриваемом же варианте осуществления изобретения упор делается на обеспечение долговечности импульсной резьбозавертывающей машины 1201 с электронным управлением, для чего изменяется цикл включения нормального вращения и обратного вращения.
В частности, в рассматриваемом варианте осуществления изобретения двигатель 1003 оснащен, аналогично четвертому варианту, датчиком температуры, и блок 1072 управления изменяет цикл включения нормального вращения и обратного вращения на основании температуры, регистрируемой датчиком температуры. Кроме того, в этом случае датчик температуры также может располагаться в иных местах, нежели у двигателя 1003.
На фиг.30 иллюстрируется изменение цикла включения нормального вращения и обратного вращения при заворачивании шурупа или самореза в импульсном режиме.
Блок 1072 управления, например, как показано на фиг.30, устанавливает цикл переключения периода нормального вращения и периода обратного вращения в первом импульсном режиме при высокой температуре более длительным по сравнению с циклом переключения периода нормального вращения и периода обратного вращения в первом импульсном режиме при комнатной температуре. Это позволяет уменьшить выделение тепла, имеющее место при таких переключениях, и избежать повреждений, обусловленных высокой температурой полевых транзисторов импульсной резьбозавертывающей машины 1301 с электронным управлением. Кроме того, это позволяет предохранить от повреждений, связанных с перегревом, пусковую обмотку, и повысить долговечность импульсной резьбозавертывающей машины 1301 с электронным управлением в целом.
Далее со ссылкой на фиг.16 и 17 рассматривается импульсная резьбозавертывающая машина 1401 с электронным управлением, соответствующая шестому варианту осуществления изобретения. В этом варианте компоненты машины, соответствующие компонентам импульсной резьбозавертывающей машины 1001 с электронным управлением в третьем варианте осуществления изобретения, обозначены теми же номерами позиций, и их описание не приводится.
Как показано на фиг.32, импульсная резьбозавертывающая машина 1401 с электронным управлением содержит ударник 1442 и наковальню 1452. В импульсной резьбозавертывающей машине 1001 с электронным управлением, соответствующей третьему варианту осуществления изобретения, угловое расстояние между ударником 1042 и наковальней 1052 в направлении вращения задано примерно равным 315°. В импульсной резьбозавертывающей машине 1401 с электронным управлением, соответствующей шестому варианту осуществления изобретения, это угловое расстояние между ударником 1442 и наковальней 1452 в направлении вращения задано примерно равным 135°.
На фиг.33 в разрезе при взгляде в направлении показанной на фиг.32 стрелки XVII показаны взаимные положения ударника 1442 и наковальни 1452 во время работы импульсной резьбозавертывающей машины 1401 с электронным управлением. Обратное вращение выполняется до отвода ударника 1442 из показанного фиг.33(1) положения контакта ударника 1442 и наковальни 1452 в максимально удаленное от наковальни 1452 положение, показанное на фиг.33(3), с прохождением положения, показанного на фиг.33(2). Затем ротор двигателя 1003 начинает нормальное вращение, ударник 1442 и наковальня 1452 сталкиваются друг с другом (фиг.33(5)) и наковальня 1452 от удара поворачивается на фиг.33 против часовой стрелки (фиг.33(6)).
Для управления работой импульсной резьбозавертывающей машины 1401 с электронным управлением, соответствующей шестому варианту осуществления изобретения, могут использоваться значения напряжений, токов, периодов подачи напряжения и пауз и прочих переменных т.д., используемые в третьем варианте осуществления изобретения и измененные соответствующим образом.
Кроме того, возможности выполнения импульсной резьбозавертывающей машины с электронным управлением изобретения не ограничиваются описанными выше вариантами осуществления изобретения и допускают внесение в эти варианты различных модификаций и усовершенствований в пределах определяемого формулой изобретения объема охраны.
Например, что касается описанных выше вариантов осуществления изобретения, при переключении между подрежимами 1-5 второго импульсного режима также учтена возможность выполнения алгоритма с возвратом к напряжению для работы во втором импульсном режиме, находящемуся на одну ступень выше (шаги S1719-S1722: "нет" на фиг.27), т.е. к предыдущему напряжению. Вместе с тем, как показано на фиг.31, удобство работы оператора достигается при управлении двигателем, исключающем возврат к предыдущему напряжению для работы во втором импульсном режиме. Кроме того, хотя в рассмотренных выше вариантах осуществления изобретения описано управление двигателем при заворачивании резьбового крепежного элемента, такого как шуруп, саморез или болт, положенная в основу изобретения идея также может использоваться применительно к ослаблению затяжки или выворачиванию крепежного элемента. В частности, как показано на блок-схеме, приведенной на фиг.34, при выворачивании шурупа, самореза или подобного крепежного элемента подача напряжения начинается во втором импульсном режиме с пятого напряжения при наибольшем периоде обратного вращения, и по мере того, как электрический ток становится меньшим или равным соответствующему пороговому значению, значение пятого напряжения для работы во втором импульсном режиме постепенно изменяется до значения первого напряжения. Благодаря этому комфортность тактильных ощущений оператора также обеспечивается при выворачивании шурупа, самореза или подобного крепежного элемента.
Кроме того, в описанных выше вариантах осуществления изобретения распознавание вида крепежного элемента осуществляется на основании электрического тока, поступающего в двигатель 1003 после подачи напряжения обратного вращения для распознавания вида крепежного элемента (шаг S1705 на фиг.27). Вместе с тем, распознавание вида крепежного элемента также может выполняться на основании частоты вращения ротора двигателя 1003 или иного параметра.
Далее, в описанных выше вариантах осуществления изобретения на шагах S1719-S1722 блок-схемы на фиг.27 используются те же пороговые значения g1-g4, что и на шагах S1710-S1713. Вместе с тем, могут использоваться и отличные от них значения.
Кроме того, в описанных выше вариантах осуществления изобретения в конструкции импульсной резьбозавертывающей машины с электронным управлением предусмотрена только одна наковальня 1052. Этим достигается разведение наковальни 1052 и ударника 1042 друг от друга на максимальный угол 360°. Вместе с тем, между наковальней и ударником может быть предусмотрена, например, еще одна наковальня. Это позволяет сократить необходимое (для поворота ударника) время при подаче напряжения обратного вращения для сопряжения рабочего инструмента с крепежным элементом (шаг S1601 на фиг.26 и шаг S1701 на фиг.27) или при подаче напряжения нормального вращения для плавного пуска (шаг S1602 на фиг.26).
Кроме того, в описанных выше вариантах осуществления изобретения ударник 1042 и наковальня 1052 приводятся в контакт друг с другом путем подачи напряжения нормального вращения для плавного пуска. Вместе с тем, могут использоваться и иные приемы, обеспечивающие постоянство исходного взаимного положения ударника 1042 и наковальни 1052, даже если ударник и наковальня необязательно приведены в контакт друг с другом.
Кроме того, хотя предлагаемая в изобретении ручная машина выполнена таким образом, что ударник приводится в нормальное вращение или в обратное вращение, такая конструкция не является обязательной. Например, можно допустить возможность выполнения ручной машины таким образом, чтобы нанесение ударов по наковальне осуществлялось путем приведения ударника в непрерывное нормальное вращение. Хотя в предлагаемой в изобретении ручной машине ударник приводится в движение электрическим двигателем, питающимся от заряжаемой аккумуляторной батареи, ударник может приводиться в движение и от иных, нежели электрический двигатель, источников энергии. В качестве примера можно назвать такой источник энергии, как двигатель внутреннего сгорания, либо электрический двигатель может приводиться в действие от топливного элемента или солнечного фотоэлемента.
Промышленная применимость
Согласно одному аспекту изобретения предложена импульсно-силовая ручная машина, в которой реализована простая конструкция ударного механизма, образованного ударником и наковальней.
Согласно другому аспекту изобретения предложена импульсно-силовая ручная машина, в которой ударник и наковальня при заворачивании крепежного элемента способны поворачиваться относительно друг друга на угол менее 360° за счет разработки соответствующего способа управления двигателем.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИМПУЛЬСНО-СИЛОВАЯ РУЧНАЯ МАШИНА | 2010 |
|
RU2534322C2 |
| ЭЛЕКТРОИНСТРУМЕНТ | 2015 |
|
RU2676194C2 |
| ГИДРОИМПУЛЬСНАЯ РУЧНАЯ МАШИНА | 2009 |
|
RU2472610C2 |
| Ручная резьбозавертывающая машина | 1980 |
|
SU944912A1 |
| ВРАЩАЮЩИЙСЯ УДАРНЫЙ ИНСТРУМЕНТ | 2010 |
|
RU2510324C2 |
| Гайковерт | 1967 |
|
SU265007A1 |
| Шуруповерт | 1982 |
|
SU1162584A1 |
| ИМПУЛЬСНО-СИЛОВАЯ РУЧНАЯ МАШИНА | 2013 |
|
RU2620399C2 |
| Система управления и передачи вращательного момента на винт(ы) в беспилотных летательных аппаратах (БПЛА), стартер-генератор, плата управления стартером-генератором и амортизатор для этой системы | 2020 |
|
RU2741136C1 |
| ЭЛЕКТРОИНСТРУМЕНТ | 2012 |
|
RU2584606C2 |
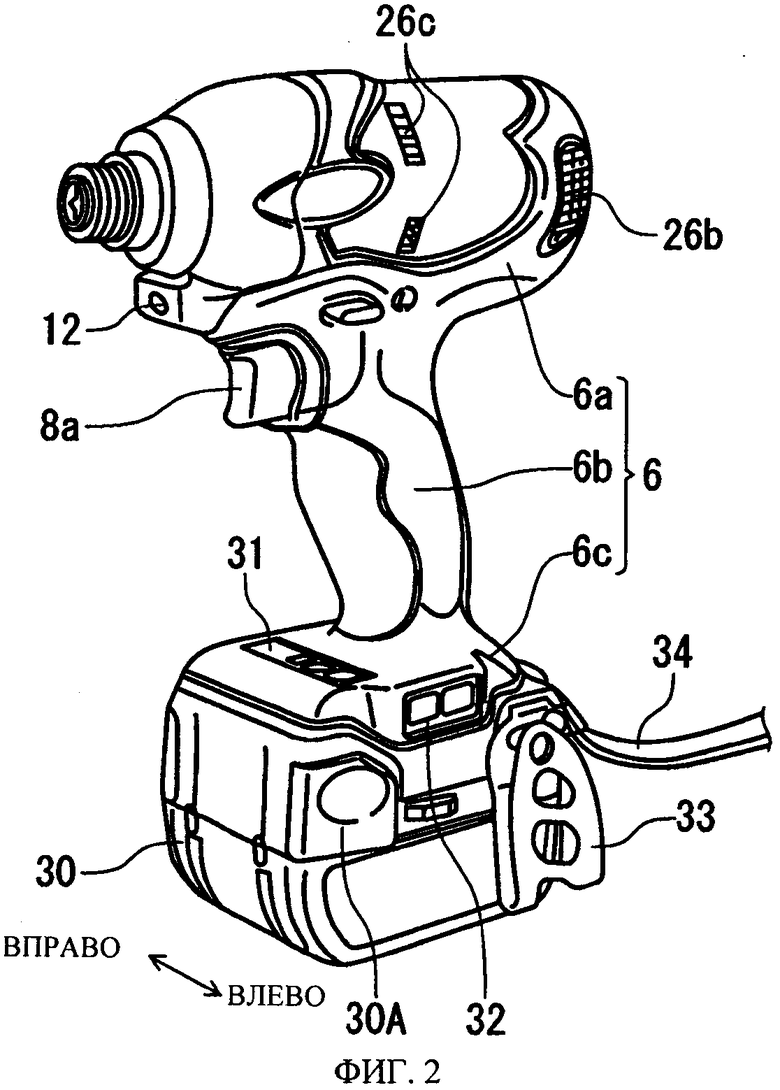









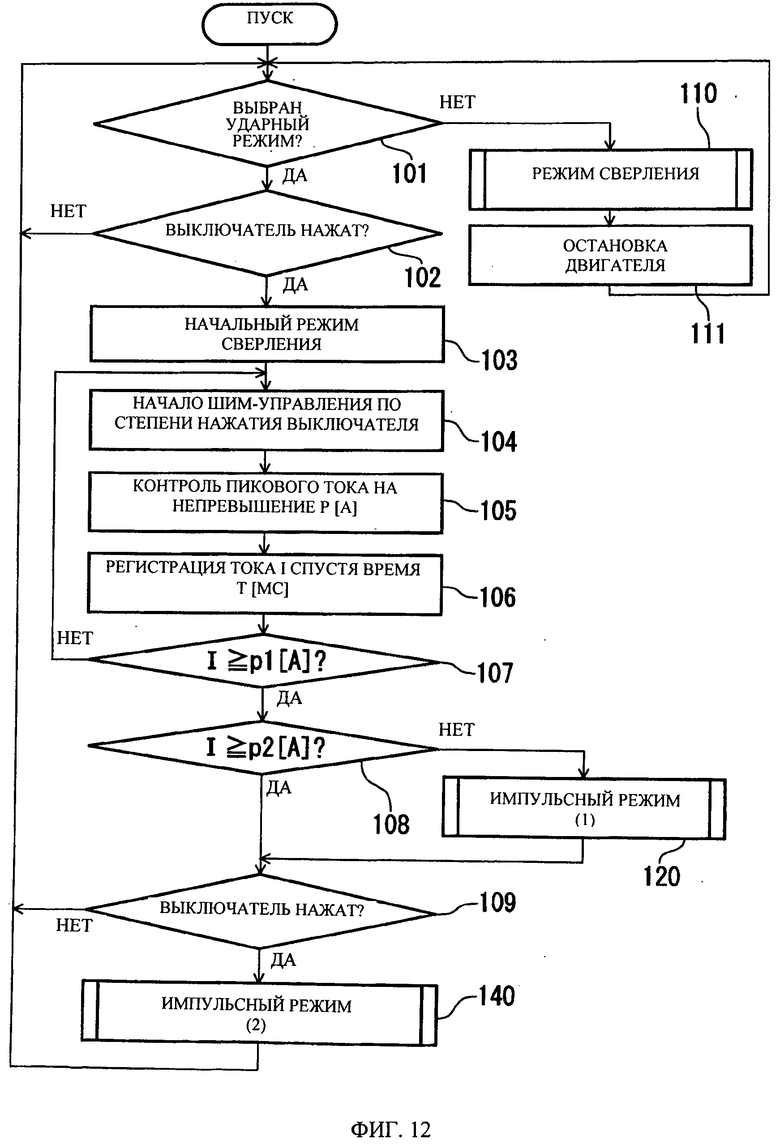



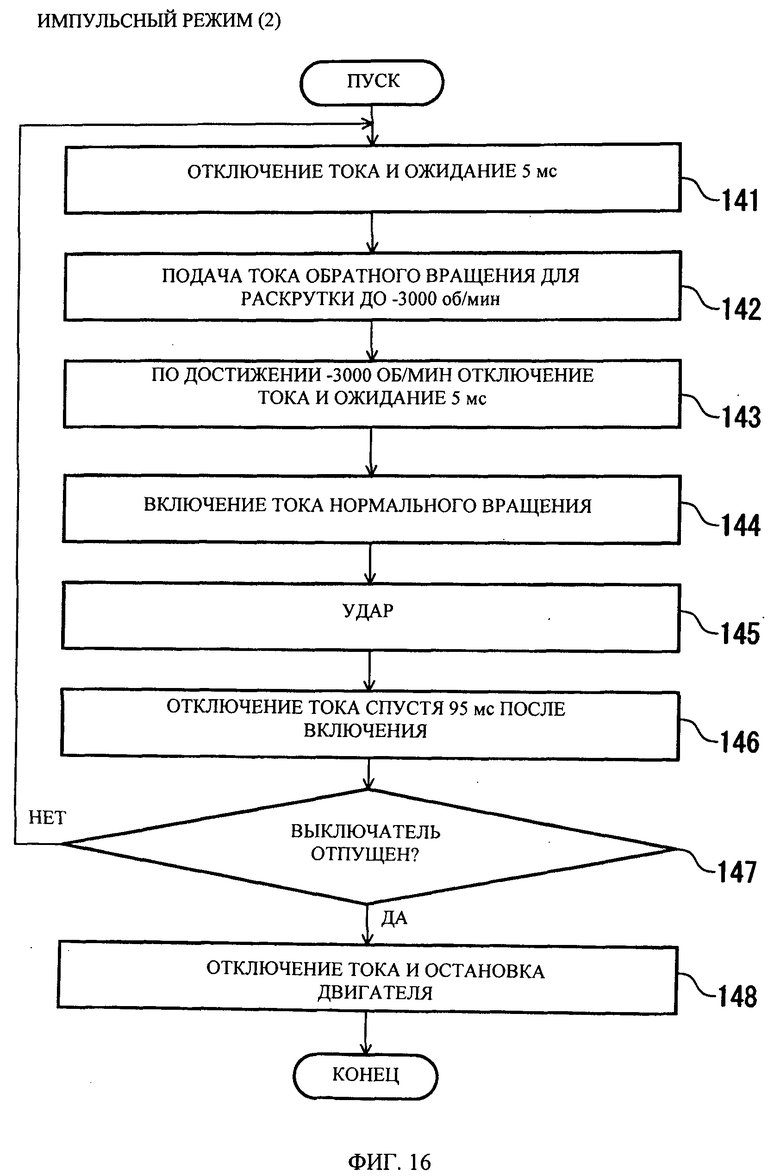
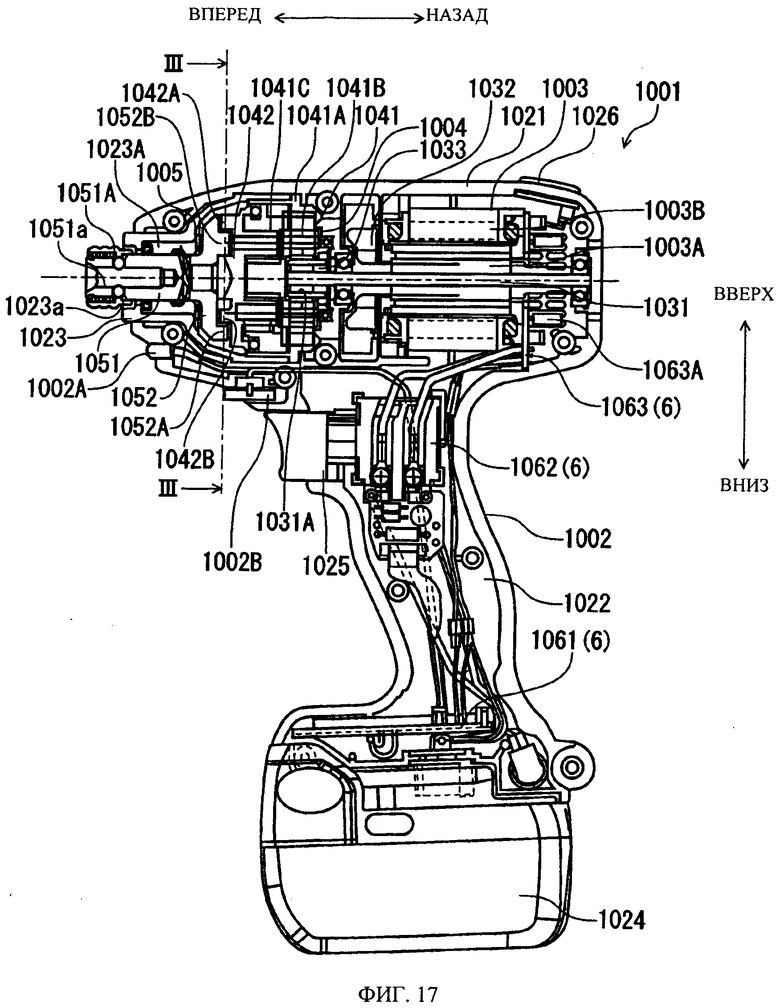

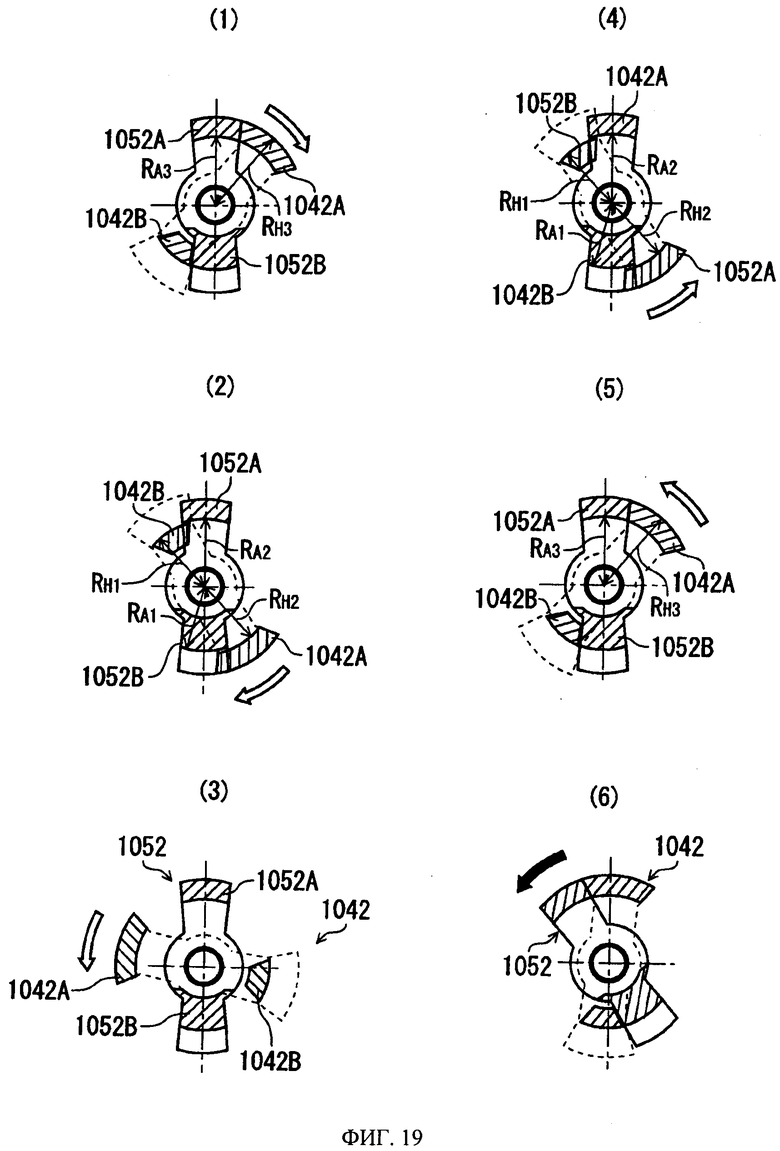
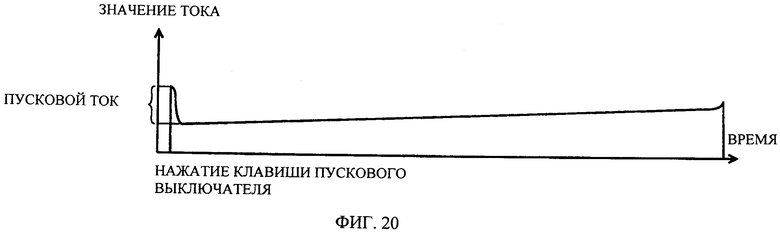






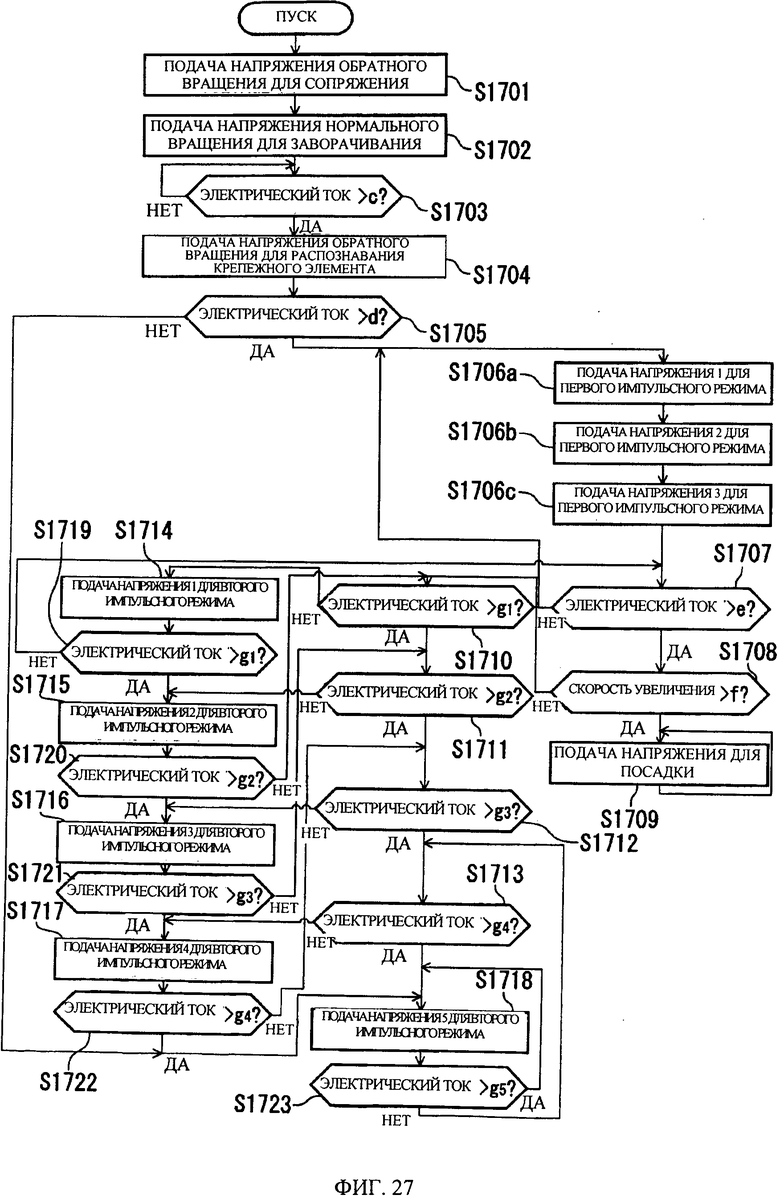
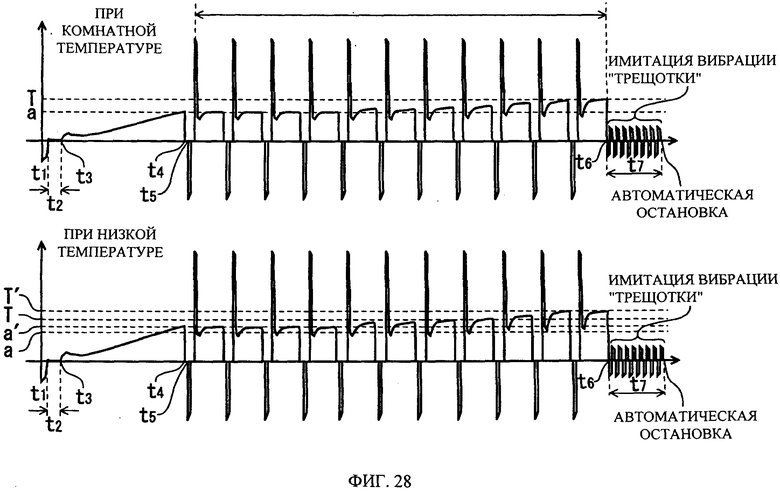

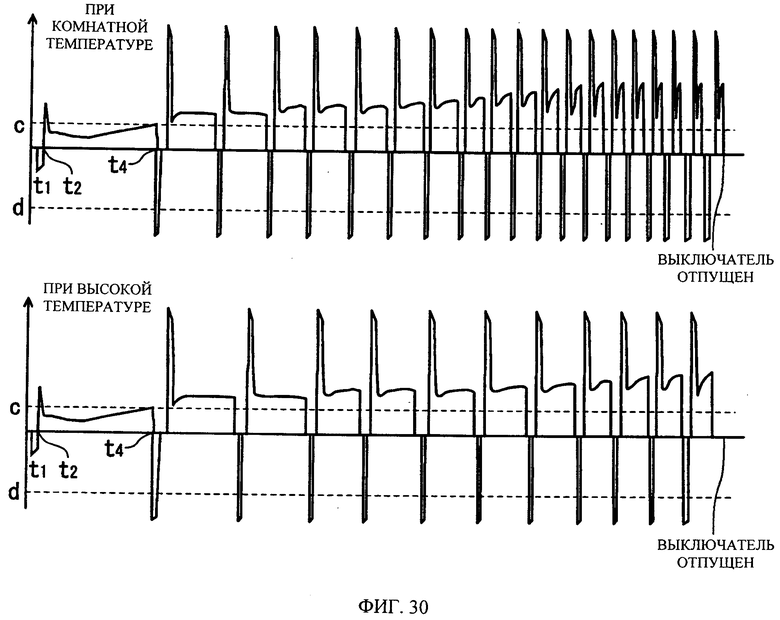


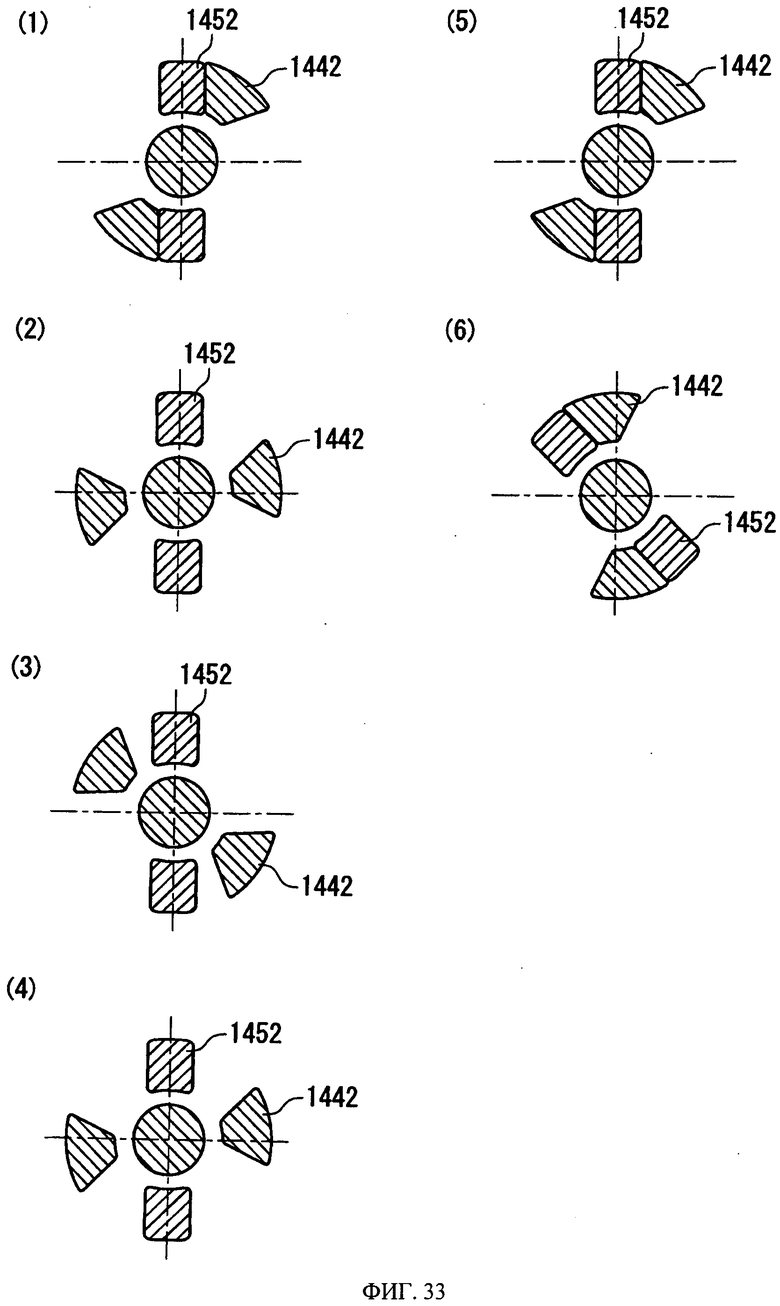

Изобретение относится к импульсно-силовой ручной машине. Ручная машина содержит двигатель, приводимый в действие в прерывистом режиме, соединенный с двигателем ударник, наковальню, ударяемую ударником для сообщения вращения/ударов рабочему инструменту, и блок управления. Блок управления управляет вращением ротора двигателя путем переключения подаваемого в двигатель управляющего импульса в соответствии с нагрузкой, приложенной к рабочему инструменту. Управляющий импульс имеет первый участок, на котором управляющий ток подается в двигатель, и второй участок, на котором управляющий ток в двигатель не подается. При этом блок управления изменяет время выдачи первого участка или второго участка управляющего импульса в соответствии с нагрузкой на рабочий инструмент. В результате улучшается управление двигателем при изменении нагрузки на рабочий инструмент. 24 з.п. ф-лы, 34 ил.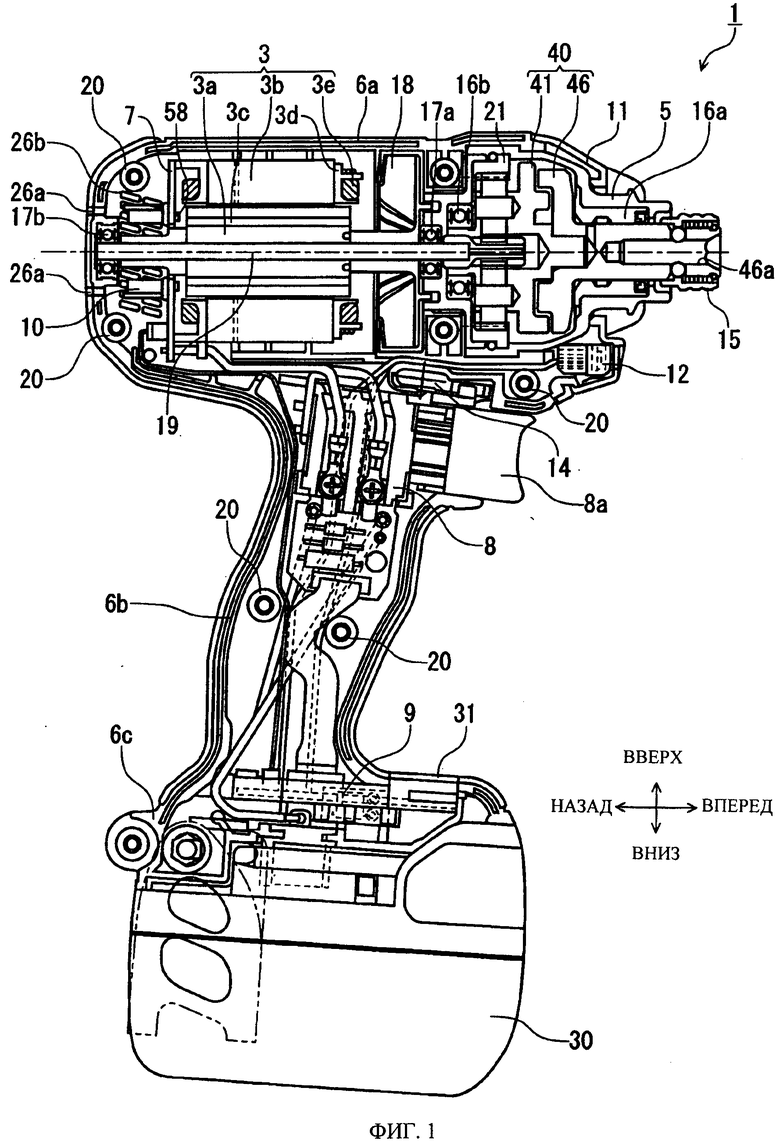
1. Импульсно-силовая ручная машина, содержащая:
- двигатель, приводимый в действие в прерывистом режиме,
- соединенный с двигателем ударник,
- наковальню, ударяемую ударником для сообщения вращения/ударов рабочему инструменту, и
- блок управления, управляющий вращением ротора двигателя путем переключения подаваемого в двигатель управляющего импульса в соответствии с нагрузкой, приложенной к рабочему инструменту,
причем управляющий импульс имеет первый участок, на котором управляющий ток подается в двигатель, и второй участок, на котором управляющий ток в двигатель не подается, а блок управления выполнен с возможностью изменения времени выдачи первого участка или второго участка управляющего импульса в соответствии с нагрузкой на рабочий инструмент.
2. Импульсно-силовая ручная машина по п.1, в которой блок управления переключает управляющий импульс на основании частоты вращения ротора двигателя.
3. Импульсно-силовая ручная машина по п.1, в которой блок управления переключает управляющий импульс на основании изменения управляющего тока, поступающего в двигатель.
4. Импульсно-силовая ручная машина по п.1, в которой блок управления изменяет время выдачи следующего управляющего импульса в соответствии с нагрузкой во время приведения в действие двигателя.
5. Импульсно-силовая ручная машина по п.2, в которой блок управления изменяет эффективное значение управляющего импульса в соответствии с нагрузкой на рабочий инструмент.
6. Импульсно-силовая ручная машина по п.2, в которой блок управления изменяет максимальное значение управляющего импульса в соответствии с нагрузкой на рабочий инструмент.
7. Импульсно-силовая ручная машина по п.1, в которой прерывистый режим приведения в действие двигателя включает в себя:
- первый прерывистый режим привода, в котором двигатель приводится только в нормальное вращение, и
- второй прерывистый режим привода, в котором двигатель приводится в нормальное вращение и в обратное вращение.
8. Импульсно-силовая ручная машина по п.1, содержащая выходной вал, приводимый во вращение от двигателя в направлении нормального вращения, причем способ управления двигателем автоматически меняется в соответствии со значением тока, проходящего при выдаче сигнала на реверсирование двигателя.
9. Импульсно-силовая ручная машина по п.8, в которой
- ударник установлен с возможностью его вращения в направлении нормального или обратного вращения движущей силой, передаваемой ему от двигателя;
- наковальня установлена отдельно от ударника с возможностью ее вращения крутящим моментом, прикладываемым к ней при вращении ударника в направлении нормального вращения;
причем импульсно-силовая ручная машина также содержит:
- держатель рабочего инструмента, способный удерживать рабочий инструмент и передавать ему вращение наковальни;
- устройство электропитания, снабжающее двигатель электрической энергией нормального вращения или обратного вращения;
причем блок управления выполнен с возможностью управления устройством электропитания таким образом, что в течение заданного периода времени в двигатель подается электрическая энергия нормального вращения для вращения наковальни заодно с ударником, а по истечении заданного периода времени в двигатель подается электрическая энергия обратного вращения, а также управления устройством электропитания таким образом, что переключение между подачей электрической энергии нормального вращения и электрической энергии обратного вращения осуществляется по первому циклу переключения, если электрический ток, поступающий в двигатель при подаче электрической энергии обратного вращения, больше или равен первому заданному значению, и по второму циклу переключения, если указанный электрический ток меньше первого заданного значения.
10. Импульсно-силовая ручная машина по п.8, в которой:
- ударник установлен с возможностью его вращения в направлении нормального или обратного вращения движущей силой, передаваемой ему от двигателя;
- наковальня установлена отдельно от ударника с возможностью удара по ней ударника и ее поворота в направлении нормального вращения за счет вращения ударника, получившего путь для ускорения путем его поворота в направлении обратного вращения;
причем импульсно-силовая ручная машина также содержит:
- держатель рабочего инструмента, способный удерживать рабочий инструмент и передавать ему вращение наковальни;
- датчик температуры, регистрирующий температуру двигателя; и
- устройство электропитания, попеременно включающее подачу в двигатель электрической энергии нормального вращения и электрической энергии обратного вращения;
причем блок управления выполнен с возможностью управления устройством электропитания таким образом, что до достижения температурой двигателя заданного значения переключение между подачей электрической энергии нормального вращения и электрической энергией обратного вращения осуществляется по первому циклу, а при повышении температуры двигателя до заданного значения переключение между подачей электрической энергии нормального вращения и электрической энергии обратного вращения осуществляется по второму циклу, более длительному, чем первый цикл.
11. Импульсно-силовая ручная машина по п.1, в которой:
- двигатель выполнен с возможностью его приведения в нормальное и обратное вращения;
- ударник установлен с возможностью вращения в направлении нормального или обратного вращения движущей силой, передаваемой ему от двигателя;
- наковальня установлена с возможностью удара по ней ударника и ее поворота в направлении нормального вращения за счет вращения ударника, получившего путь для ускорения путем его поворота в направлении обратного вращения;
причем импульсно-силовая ручная машина также содержит:
- держатель рабочего инструмента, способный удерживать рабочий инструмент и передавать ему вращение наковальни;
- устройство электропитания, попеременно включающее подачу в двигатель электрической энергии нормального вращения и электрической энергии обратного вращения;
причем блок управления выполнен с возможностью управления устройством электропитания таким образом, что с увеличением поступающего в двигатель электрического тока увеличивается отношение периода времени, в течение которого подается электрическая энергия обратного вращения, к периоду времени, в течение которого подается электрическая энергия нормального вращения.
12. Импульсно-силовая ручная машина по п.11, в которой на первой стадии, когда поступающий в двигатель электрический ток увеличивается до заданного значения, блок управления управляет устройством электропитания в первом режиме, в котором период нормального вращения, в течение которого подается электрическая энергия нормального вращения, уменьшается, а на второй стадии, когда поступающий в двигатель электрический ток превысил заданное значение, блок управления управляет устройством электропитания во втором режиме, в котором период обратного вращения, в течение которого подается электрическая энергия обратного вращения, увеличивается.
13. Импульсно-силовая ручная машина по п.12, в которой блок управления на второй стадии способен выбирать один из нескольких вторых режимов с различными отношениями периодов подачи электрической энергии обратного и нормального вращений.
14. Импульсно-силовая ручная машина по п.13, в которой среди нескольких вторых режимов с различными отношениями периодов подачи электрической энергии обратного и нормального вращений блок управления на второй стадии разрешает только переключение во второй режим с более долгим периодом обратного вращения из второго режима с более коротким периодом обратного вращения.
15. Импульсно-силовая ручная машина по п.13, в которой среди нескольких вторых режимов с различными отношениями периодов подачи электрической энергии обратного и нормального вращений блок управления на второй стадии разрешает только переключение во второй режим, соседний по длительности, периода обратного вращения.
16. Импульсно-силовая ручная машина по п.1, в которой двигатель выполнен с возможностью его приведения в нормальное вращение и в обратное вращение, причем время, в течение которого ударник приводится в нормальное вращение, постепенно уменьшается.
17. Импульсно-силовая ручная машина по п.16, в которой время, в течение которого ударник приводится в обратное вращение, постепенно увеличивается.
18. Импульсно-силовая ручная машина по п.16, содержащая регистрирующее средство, способное регистрировать значение электрического тока, поступающего в двигатель, причем:
- для поступающего в двигатель тока задано первое значение, второе значение, превышающее первое значение, и третье значение, превышающее второе значение,
- управление двигателем осуществляется в первом режиме по первому значению тока, во втором режиме по второму значению тока и в третьем режиме по третьему значению тока, и
- если регистрирующее средство двигателя зарегистрировало первое значение тока, а непосредственно после регистрации первого значения тока - третье значение тока, то после управления в первом режиме управление осуществляется во втором режиме.
19. Импульсно-силовая ручная машина по п.16, содержащая регистрирующее средство, способное регистрировать значение электрического тока, поступающего в двигатель, причем:
- для поступающего в двигатель тока задано первое значение и второе значение, превышающее первое значение,
- управление двигателем осуществляется в первом режиме по первому значению тока и во втором режиме по второму значению тока, и
- после управления в первом режиме управление осуществляется не в первом режиме, а во втором режиме.
20. Импульсно-силовая ручная машина по п.19, в которой для поступающего в двигатель тока задано третье значение, превышающее второе значение тока, причем:
- управление двигателем осуществляется в третьем режиме по третьему значению тока, и
- после управления во втором режиме управление осуществляется во втором режиме или в третьем режиме.
21. Импульсно-силовая ручная машина по п.16, содержащая регистрирующее средство, способное регистрировать значение электрического тока, поступающего в двигатель, причем:
- для поступающего в двигатель тока задано первое значение, второе значение, превышающее первое значение, и третье значение, превышающее второе значение, и
- управление двигателем осуществляется в первом режиме по первому значению тока, во втором режиме по второму значению тока и в третьем режиме по третьему значению тока, и
- управление в третьем режиме осуществляется после первого режима, если зарегистрировано первое значение тока, а затем зарегистрировано третье значение тока.
22. Импульсно-силовая ручная машина по п.16, выполненная с возможностью автоматического изменения способа управления двигателем.
23. Импульсно-силовая ручная машина по п.22, в которой способ управления двигателем автоматически меняется в соответствии с нагрузкой на двигатель.
24. Импульсно-силовая ручная машина по п.22, в которой нагрузка на двигатель представлена электрическим током, создаваемым в двигателе.
25. Импульсно-силовая ручная машина по п.22, в которой способ управления двигателем автоматически меняется в соответствии с количеством времени.
| ГИГИЕНИЧЕСКАЯ ПРОКЛАДКА, ВКЛЮЧАЮЩАЯ В СЕБЯ ЧУВСТВИТЕЛЬНЫЙ К ВЛАГЕ СТАБИЛИЗИРУЮЩИЙ СЛОЙ | 2007 |
|
RU2441670C2 |
| Гравитационный смеситель | 1988 |
|
SU1595651A1 |
| УДАРНО-ВРАЩАТЕЛЬНЫЙ МЕХАНИЗМ | 1992 |
|
RU2062691C1 |
| Ударный гайковерт | 1981 |
|
SU1046081A1 |

