Область техники
Настоящее изобретение относится к оптическому кодеру, который определяет позицию, и, в частности, к оптическому кодеру, который определяет позиционную информацию, относящуюся к фокусирующей линзе и трансфокатору, входящим в состав линзового устройства, например, фотоаппарата или видеокамеры.
Уровень техники
Традиционно, кодер используется для определения позиции станка или устройства автоматизированного производства (FA). Системы определения позиции для кодера можно грубо подразделить на инкрементную систему для измерения расстояния относительного перемещения и абсолютную систему для определения абсолютной позиции. Преимущество кодера, использующего инкрементную систему, состоит в более простой конфигурации, а его недостаток состоит в утрате позиционной информации при отключении питания и накоплении ошибок за счет внешнего шума. С другой стороны, кодер, использующий абсолютную систему, обычно имеет преимущество высокой точности, поскольку ошибки не накапливаются, и перемещение в исходную позицию не требуется даже при отключении питания.
Кодер, использующий абсолютную систему для определения абсолютной позиции, имеет конфигурацию, показанную на фиг. 14, например, рассмотренную в выложенной патентной заявке Японии № 2009-198318. Согласно этому примеру из малого количества дорожек шкалы можно получить больше информации, формируя совокупность модуляций, имеющих разные периоды, в шаблоне шкалы на одной дорожке.
При осуществлении анализа на основании традиционного примера изображение, принятое на поверхности датчика через шкалу, включающую в себя совокупность периодов модуляции, включает в себя ненужные пространственно-частотные компоненты, генерируемые посредством интерференции между дифрагировавшими световыми пучками, и ненужные пространственно-частотные компоненты, входящие в состав распределения коэффициента пропускания или распределения коэффициента отражения в шкале. Этот эффект приводит к отклонению от идеальной синусоидальной волны. Это отклонение приводит к ошибке в определении позиции при преобразовании синусоидальной волны в сигнал позиции посредством операции арктангенса.
Сущность изобретения
Настоящее изобретение относится к кодеру, способному определять множество данных из одной дорожки с высокой точностью.
Согласно аспекту настоящего изобретения оптический кодер включает в себя источник света, шкалу смещения, включающую в себя дорожку шкалы, имеющую распределение коэффициента пропускания или распределение коэффициента отражения, включающее в себя позиционную информацию, и матрицу светоприемных элементов, выполненную с возможностью приема светового потока, испускаемого из источника света и пропущенного или отраженного шкалой смещения, при этом распределение коэффициента пропускания или распределение коэффициента отражения, обеспеченное в дорожке шкалы, имеет первый период модуляции и второй период модуляции в направлении смещения шкалы, причем матрица светоприемных элементов предназначена для регистрации первой группы сигналов, включающей в себя два сигнала фазы, находящихся в противофазе друг с другом, в течение первого периода модуляции и второй группы сигналов, включающей в себя два сигнала фазы, находящихся в противофазе друг с другом, в течение второго периода модуляции, причем первая позиционная информация в течение первого периода модуляции определяется из первой группы сигналов, и вторая позиционная информация в течение второго периода модуляции определяется из второй группы сигналов, причем второй период модуляции является нечетнократным первого периода модуляции.
Согласно вышеописанной конфигурации можно уменьшить ненужные пространственно-частотные компоненты, генерируемые посредством интерференции между дифрагировавшими световыми пучками в изображении, принятом на светоприемной поверхности матрицы светоприемных элементов, и ненужные пространственно-частотные компоненты, входящие в состав распределения коэффициента пропускания или распределения коэффициента отражения на дорожке шкалы, и можно уменьшить ошибочные компоненты регистрируемой формы волны. Это позволяет определять позицию с высокой точностью.
Другие признаки и аспекты настоящего изобретения явствуют из нижеследующего подробного описания иллюстративных вариантов осуществления, приведенного со ссылками на прилагаемые чертежи.
Краткое описание чертежей
Прилагаемые чертежи, включенные в описание изобретения и составляющие его часть, демонстрируют иллюстративные варианты осуществления, признаки и аспекты изобретения и, совместно с описанием, призваны пояснять принципы изобретения.
Фиг. 1 - схема, поясняющая конфигурацию оптического кодера согласно первому иллюстративному варианту осуществления настоящего изобретения.
Фиг. 2A и 2B - конфигурация сенсорного блока 301, показанного на фиг. 1.
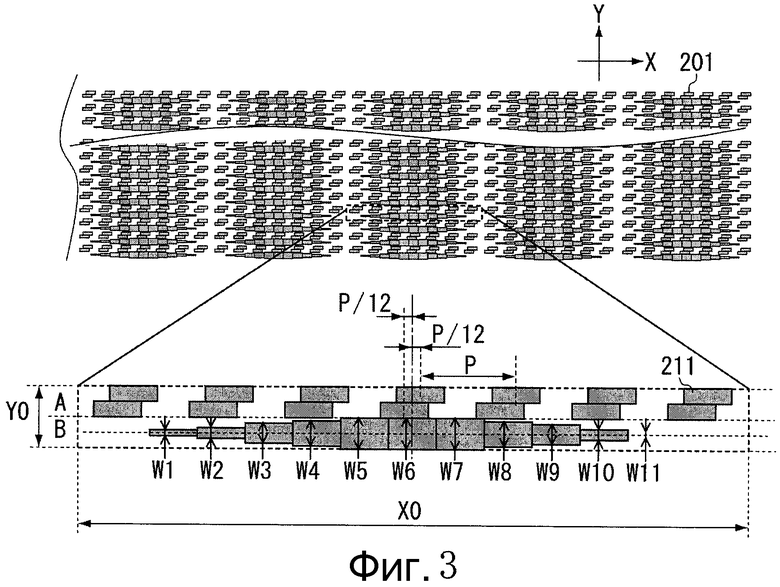
Фиг. 3 - вид сверху, демонстрирующий конфигурацию первой дорожки 201 в шкале 200, показанной на фиг. 2A и 2B.
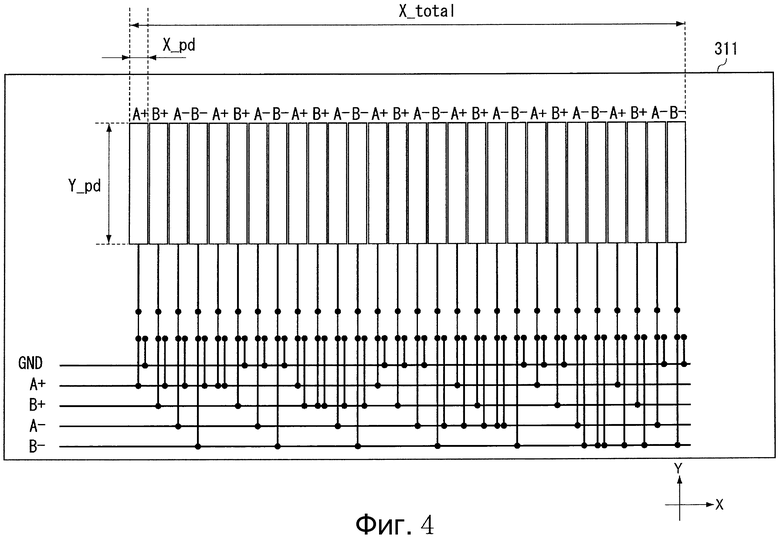
Фиг. 4 - вид сверху, демонстрирующий конфигурацию фотодиодной матрицы на светоприемной поверхности при обнаружении первой группы сигналов в первом иллюстративном варианте осуществления.
Фиг. 5 - вид сверху, демонстрирующий конфигурацию фотодиодной матрицы на светоприемной поверхности при обнаружении второй группы сигналов в первом иллюстративном варианте осуществления.
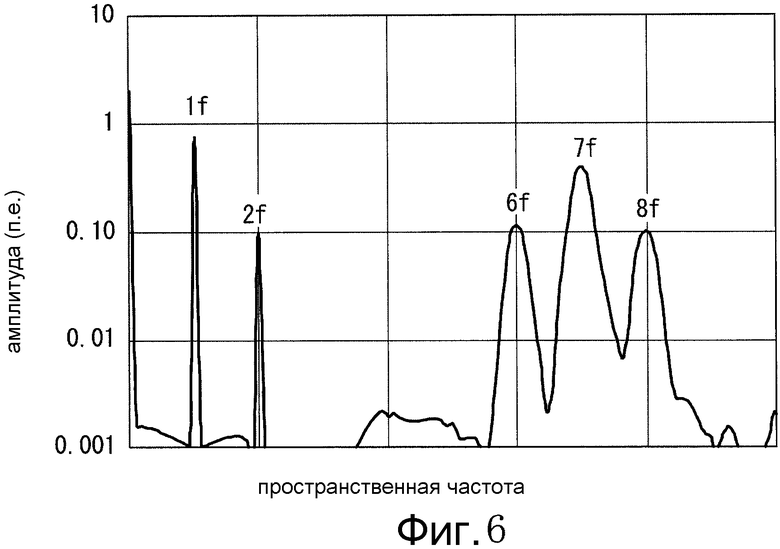
Фиг. 6 - пространственно-частотные компоненты, входящие в состав отраженного дифракционного изображения шкалы в первом иллюстративном варианте осуществления.
Фиг. 7 - гармонический компонент, входящий в состав синусоидального сигнала S (A) в первом иллюстративном варианте осуществления.
Фиг. 8 - операция инициализации оптического кодера согласно первому иллюстративному варианту осуществления.
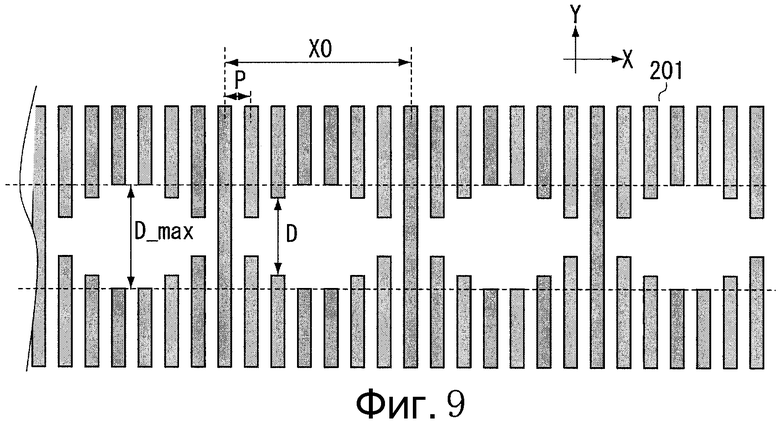
Фиг. 9 - шаблон шкалы согласно второму иллюстративному варианту осуществления.
Фиг. 10 - схема, поясняющая конфигурацию оптического кодера вращательного типа согласно третьему иллюстративному варианту осуществления настоящего изобретения.
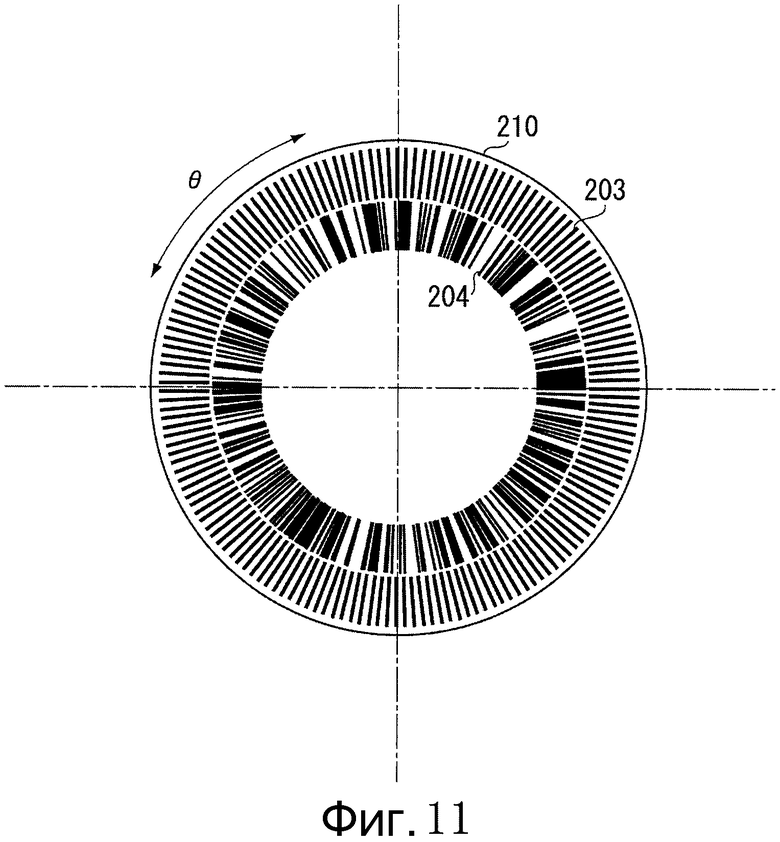
Фиг. 11 - конфигурация дорожек вращающейся шкалы смещения 210 согласно третьему иллюстративному варианту осуществления настоящего изобретения.
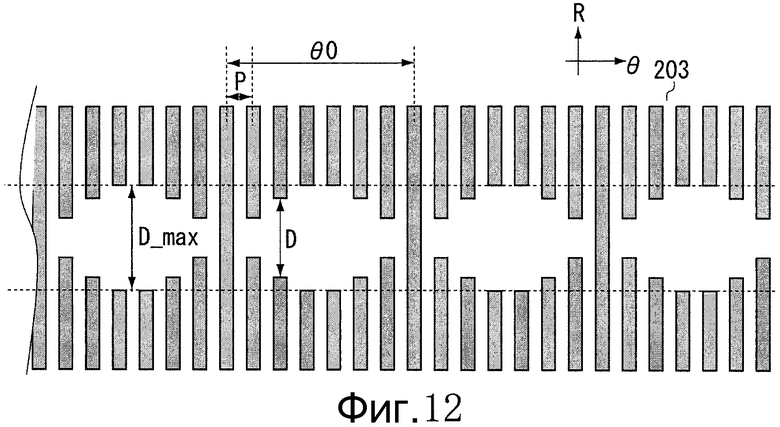
Фиг. 12 - увеличенный вид части радиальной дорожки 211.
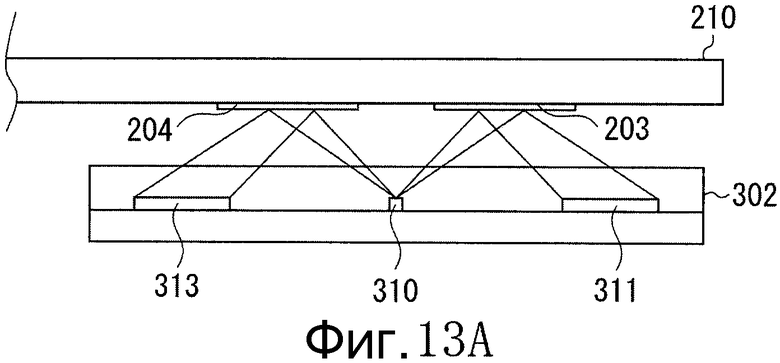
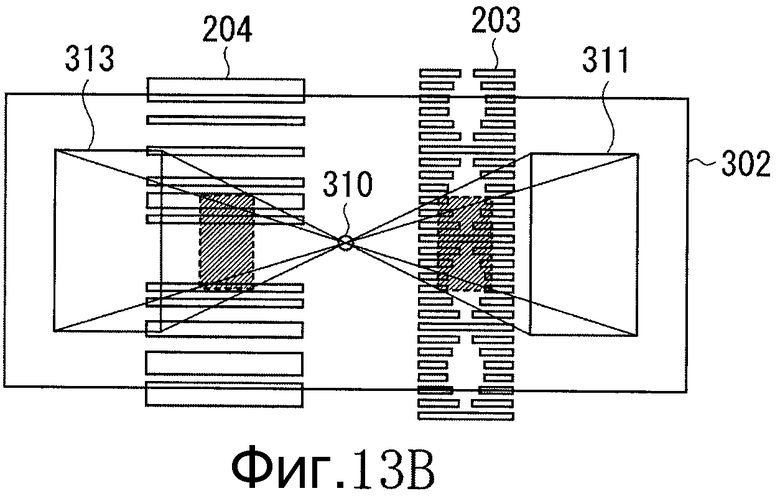
Фиг. 13A и 13B - конфигурация сенсорного блока 302, показанного на фиг. 10.
Фиг. 14 - схема, иллюстрирующая традиционный подход.
Описание вариантов осуществления
Различные иллюстративные варианты осуществления, признаки и аспекты изобретения будут подробно описаны ниже со ссылкой на чертежи.
На фиг. 1 показана конфигурация оптического кодера согласно первому иллюстративному варианту осуществления настоящего изобретения. Оптический кодер включает в себя шкалу 200 смещения, присоединенную к подвижной детали, сенсорный блок 301, присоединенный к неподвижной детали, схему 401 обработки сигналов, служащую в качестве блока управления, и запоминающее устройство 402. Схема 401 обработки сигналов, выступающая в роли блока управления, осуществляет интерполяционную обработку сигнала кодера, полученного от сенсорного блока 301, записывает сигнал в запоминающее устройство 402 и считывает его оттуда и выводит сигнал позиции.
На фиг. 2A и 2B показана конфигурация сенсорного блока 301, где на фиг. 2A показан вид сбоку, и на фиг. 2B показан вид сверху.
Сенсорный блок 301 представляет собой интегрированный сенсорный блок с возможностью приема и излучения света, в котором светодиод (СИД) 310, выступающий в роли источника света, и фотодиодные матрицы 311 и 312, выступающие в роли матриц светоприемных элементов, смонтированы в одном корпусе. Шкала 200 смещения имеет хромовую отражающую пленку, шаблонированную в виде двух щелевых дорожек, т.е. первой и второй щелевых дорожек 201 и 202 на ее стеклянной подложке.
Первая дорожка 201 и вторая дорожка 202 шкалы 200 смещения облучаются расходящимся световым потоком, испускаемым из СИД 310 в сенсорном блоке 301. Световые пучки, отраженные от первой дорожки 201 и второй дорожки 202, соответственно отражаются к фотодиодным матрицам 311 и 312 в сенсорном блоке 301. Распределения коэффициента отражения щелевых дорожек 201 и 202 соответственно принимаются как изображения, увеличенные в два раза (двукратно увеличенные изображения) на фотодиодных матрицах 311 и 312.
В частности, светло-темная картина (светло-темная интерференционная картина) формируется в направлении, в котором шкала смещается по светоприемным поверхностям фотодиодных матриц 311 и 312.
Световой поток, облучающий область, в которой сформирована хромовая отражающая пленка, отражается хромовой отражающей пленкой в направлении фотодиодных матриц 311 и 312 (светлая картина). Световой поток, облучающий область, в которой не сформирована хромовая отражающая пленка, не отражается в направлении фотодиодных матриц 311 и 312 (темная картина).
Световые потоки, принятые фотодиодными матрицами 311 и 312, соответственно преобразуются в электрические сигналы, и поступают в качестве сигналов кодера на схему 401 обработки сигналов, показанную на фиг. 1.
На фиг. 3 показан увеличенный вид части первой дорожки 201 шкалы 200 смещения. На первой дорожке 201 имеются шаблоны 211 единичных блоков, периодически расположенные на ней в направлении движения (в направлении оси X) и в направлении, перпендикулярном направлению движения (в направлении оси Y).
Направление движения (направление оси X) шаблона 211 единичных блоков задано как направление смещения шкалы или направление продольного измерения.
Шаблон 211 единичных блоков на первой дорожке 201 имеет ширину X0 в направлении оси X, равную 700 мкм, и имеет ширину Y0 в направлении оси Y, равную 50 мкм. Шаблон 211 единичных блоков включает в себя область (область A), включающую в себя строку первых шаблонов модуляции, расположенных эквидистантно с шагом P, равным 100 мкм, при ширине в направлении оси X 50 мкм, и область (область B), включающую в себя строку вторых шаблонов модуляции, имеющую период 700 мкм. Ширина области A в направлении оси Y, выступающая в роли первого периода модуляции, и ширина области B в направлении оси Y, выступающая в роли второго периода модуляции, равны 25 мкм.
Область A дополнительно разделена в направлении оси Y на участки шириной 12,5 мкм, и строки шаблона, соответственно, сдвинуты на ±(100/12) мкм в направлении оси X относительно центральной линии отсчета шаблона 211 единичных блоков. При такой конфигурации распределение интенсивности отраженного изображения шкалы интегрируется в области светоприемной поверхности, в результате чего тройной частотный компонент, имеющий частоту 100 мкм, подавляется, и отклонение из идеальной синусоидальной волны уменьшается.
Хотя в настоящем иллюстративном варианте осуществления предпринимаются меры только против тройного частотного компонента, настоящее изобретение этим не ограничивается. Можно применять многоступенчатый сдвиг или непрерывный сдвиг для подавления других частотных компонентов.
В области B располагается 11 отражательных шаблонов, имеющих ширину в направлении оси X, равную 50 мкм. Ширина в направлении оси Y отражательных шаблонов W1, W2, W3, W4, W5, W6, W7, W8, W9, W10 и W11 равна, соответственно, 5 мкм, 9 мкм, 16 мкм, 20 мкм, 25 мкм, 25 мкм, 25 мкм, 20 мкм, 16 мкм, 9 мкм и 5 мкм.
Аналогично, шаблон единичных блоков, имеющий позиционную информацию, относящуюся к шкале смещения, на второй дорожке 202 имеет ширину X0 в направлении оси X, равную 714,58333 мкм, и ширину Y0 в направлении оси Y, равную 50 мкм. Шаблон единичных блоков включает в себя область (область A), включающую в себя строку первых шаблонов модуляции, имеющих первую позиционную информацию, расположенных эквидистантно с шагом P, равным 102,08333 мкм при ширине в направлении оси X 51,041667 мкм, и область (область B), включающую в себя строку вторых шаблонов модуляции, имеющих вторую позиционную информацию, имеющих период 714,58333 мкм. Ширина области A в направлении оси Y, выступающая в роли первого периода модуляции, и ширина области B в направлении оси Y, выступающая в роли второго периода модуляции, равны 25 мкм.
Область A дополнительно разделена в направлении оси Y на участки шириной 12,5 мкм, и строки шаблона, соответственно, сдвинуты на ± (102,08333/12) мкм в направлении оси X относительно линии отсчета.
В области B располагается 11 отражательных шаблонов, имеющих ширину в направлении оси X, равную 51,041667 мкм. Ширина в направлении оси Y отражательных шаблонов W1, W2, W3, W4, W5, W6, W7, W8, W9, W10 и W11 равна, соответственно, 5 мкм, 9 мкм, 16 мкм, 20 мкм, 25 мкм, 25 мкм, 25 мкм, 20 мкм, 16 мкм, 9 мкм и 5 мкм.
На фиг. 4 и 5 показана конфигурация фотодиодной матрицы 311 на светоприемной поверхности. Выходной сигнал кодера будет описан ниже.
Конфигурация фотодиодной матрицы 312 аналогична конфигурации фотодиодной матрицы 311. В фотодиодной матрице 311 находится 28 фотодиодов с шагом 50 мкм в направлении оси X. Один из фотодиодов имеет ширину X_pd в направлении оси X, равную 50 мкм, и ширину Y_pd в направлении оси Y, равную 800 мкм. Полная ширина X_total фотодиодной матрицы 311 равна 1400 мкм (50×28).
Выход каждого фотодиода электрически соединен с четырьмя усилителями преобразования "ток-напряжение" (IV) следующего каскада через коммутационную схему. Выходные сигналы четырех усилителей IV-преобразования, соответственно, соответствуют четырем синусоидальным выходным сигналам с разными фазами S (A+), S (B+), S (A-) и S (B-). Коммутационная схема может переключать электрическое соединение в определенной временной последовательности в соответствии с входным сигналом извне.
Если входной сигнал находится на высоком уровне, шаг регистрации с шаблоном шкалы равен 100 мкм (период отраженного изображения 200 мкм), как показано на фиг. 4. Если входной сигнал находится на низком уровне, шаг регистрации с шаблоном шкалы равен 700 мкм (период отраженного изображения 1400 мкм), как показано на фиг. 5.
Комбинация первых электрических соединений и комбинация вторых электрических соединений переключаются в определенной временной последовательности, что позволяет упростить светоприемную поверхность и периферийную схему с использованием той же конфигурации.
В настоящем иллюстративном варианте осуществления одна непрерывная совокупная область матрицы в комбинации вторых электрических соединений равна ширине на светоприемной поверхности, соответствующей первому периоду модуляции матрицы светоприемных элементов. В частности, при шаге регистрации 700 мкм, четыре соседних фотодиода электрически соединены друг с другом. Таким образом, ширина 200 мкм, совпадающая с периодом отраженного изображения модуляционного компонента, имеющего период 100 мкм в шаблоне шкалы, интегрируется. Это позволяет уменьшить влияние модуляционного компонента, имеющего период 100 мкм, на выходной сигнал.
В настоящем иллюстративном варианте осуществления полная ширина матрицы светоприемных элементов, входящей в комбинацию первых электрических соединений, является целым кратным шага регистрации, с которым считывается второй период модуляции.
В частности, с шагом регистрации 100 мкм, полная ширина фотодиодов, относящихся к сигналу, составляет 1400 мкм, что совпадает с периодом отраженного изображения модуляционного компонента, имеющего период 700 мкм. Это позволяет уменьшить влияние модуляционного компонента, имеющего период 700 мкм, на изменение амплитуды выходного сигнала.
В частности управление матрицами 311 и 312 светоприемных элементов сводится к переключению комбинации первых электрических соединений для определения первой позиционной информации в течение первого периода модуляции и комбинации вторых электрических соединений для определения второй позиционной информации в течение второго периода модуляции. Первая группа сигналов регистрируется комбинацией первых электрических соединений (см. фиг. 4), и вторая группа сигналов регистрируется комбинацией вторых электрических соединений (см. фиг. 5).
Выходные синусоидальные волны с четырьмя разными фазами S (A+), S (B+), S (A-) и S (B-) имеют такие соотношения для каждого из шагов регистрации, что относительные фазы сигналов S (B+), S (A-), и S (B-) соответственно сдвинуты примерно на +90 градусов, +180 градусов и +270 градусов относительно фазы сигнала S (A+). Схема 401 обработки сигналов осуществляет следующие операции над выходными сигналами для генерации синусоидальных сигналов с двумя разными фазами S (A) и S (B), из которых удалены компоненты постоянного тока, после чего над сигналами выполняется операция арктангенса для получения сигналов фазы.
S (A)=S (A+)-S (A-)
S (B)=S (B+)-S (B-)
Матрица светоприемных элементов обнаружении предназначена для регистрации первой группы сигналов, включающей в себя два сигнала фазы S (A+) и S (A-), находящихся в противофазе друг с другом, в течение первого периода модуляции и второй группы сигналов, включающей в себя два сигнала фазы S (B+) и S (B-), находящихся в противофазе друг с другом, в течение второго периода модуляции.
Операция арктангенса означает операцию для вычисления фаз из двух синусоидальных волн с относительным сдвигом фазы 90 градусов, т.е. волны SIN и волны COS.
В настоящем иллюстративном варианте осуществления полная ширина матрицы светоприемных элементов, входящей в комбинацию первых электрических соединений, является целым кратным шага регистрации, с которым считывается второй период модуляции.
На фиг. 6 показаны пространственно-частотные компоненты, входящие в состав отраженного дифракционного изображения шкалы. Ненужные пространственно-частотные компоненты 2f, 6f и 8f генерируются посредством интерференции между дифрагировавшими световыми пучками помимо пространственно-частотного компонента 1f двукратно увеличенного изображения, имеющего период 700 мкм, и пространственно-частотного компонента 7f двукратно увеличенного изображения, имеющего период 100 мкм.
На фиг. 7 представлен результат вычисления гармонического компонента, входящего в состав синусоидального сигнала S (A), генерируемого при регистрации отраженного дифракционного изображения с шагом регистрации 700 мкм. Четыре соседних фотодиода интегрируются для подавления частотного компонента 7f. Далее, частотные компоненты 2f, 6f и 8f ликвидируются посредством операции S (A+)-S (A-). В результате, ненужные пространственно-частотные компоненты уменьшаются, и получается, по существу, идеальная синусоидальная волна.
Опишем механизм генерации каждого частотного компонента. Пространственная частота интерференционной полосы, обусловленной интерференцией между дифрагировавшими световыми пучками, определяется через разность углов дифракции дифрагировавших световых пучков, интерферирующих друг с другом. Пространственно-частотный компонент 1f генерируется посредством интерференции между световым пучком нулевого порядка и дифрагировавшими световыми пучками ± первого порядка с грубым периодом.
Пространственно-частотный компонент 7f генерируется посредством интерференции между световым пучком нулевого порядка и дифрагировавшими световыми пучками ± первого порядка с точным периодом. Пространственно-частотный компонент 2f генерируется посредством интерференции между дифрагировавшими световыми пучками ± первого порядка с грубым периодом.
Пространственно-частотный компонент 6f генерируется посредством интерференции между дифрагировавшим световым пучком + первого порядка (- первого порядка) с точным периодом и дифрагировавшим световым пучком + первого порядка (- первого порядка) с грубым периодом. Пространственно-частотный компонент 8f генерируется посредством интерференции между дифрагировавшим световым пучком + первого порядка (- первого порядка) с точным периодом и дифрагировавшим световым пучком - первого порядка (+ первого порядка) с грубым периодом.
Таким образом, ненужные пространственно-частотные компоненты, являющиеся причиной ошибок при интерполяционной обработке синусоидальной волны, генерируются как пространственно-частотные компоненты, соответствующие сумме и разности пространственных частот двукратно увеличенных изображений, имеющих точный период и грубый период.
В настоящем иллюстративном варианте осуществления первый, точный, период модуляции (точный период) является нечетным кратным второго, грубого, периода модуляции (грубого периода), благодаря чему ненужные пространственно-частотные компоненты, входящие в состав отраженного дифракционного изображения, могут быть четным гармоническим компонентом грубого пространственно-частотного компонента. Таким образом, ненужные пространственно-частотные компоненты можно совместно удалять посредством дифференциальной операции на последующем каскаде.
Хотя в настоящем иллюстративном варианте осуществления точный период модуляции (точный период) в семь раз больше грубого периода модуляции (грубого периода), он может превышать его в пять раз, девять раз и т.д., если он является нечетным кратным 2n+1 (n - натуральное число), для получения аналогичного эффекта.
Ниже описана процедура для определения абсолютной позиции.
Сигнал φ1 фазы на первой дорожке 201 и сигнал φ2 фазы на второй дорожке 202, которые генерируются, когда входной сигнал коммутационной схемы находится на высоком уровне (шаг регистрации 100 мкм), и сигнал φ1' фазы на первой дорожке 201 и сигнал φ2' фазы на второй дорожке 202, которые генерируются, когда входной сигнал коммутационной схемы находится на низком уровне (шаг регистрации 700 мкм), можно получить, принимая сигналы сразу после переключения входа коммутационной схемы, что позволяет получить сигналы фазы φ1, φ2, φ1' и φ2' в одной и той же позиции.
Хотя шкала 200 смещения движется с большой скоростью, синхронизация ослабевает. Однако в этом случае синхронизацию можно обеспечить, осуществляя получение несколько раз для определения среднего значения фазы. В частности выходные синусоидальные волны S (A+), S (A-), S (B+) и S (B-) получаются с шагом регистрации 100 мкм, и входной сигнал коммутационной схемы переходит с высокого уровня на низкий уровень.
Затем получаются выходные синусоидальные волны S (A+), S (A), S (B+) и S (B-) с шагом регистрации 700 мкм, входной сигнал коммутационной схемы переходит с низкого уровня на высокий уровень, и выходные синусоидальные волны S (A+), S (A-), S (B+) и S (B-) снова получаются с шагом регистрации 100 мкм. Интервалы между соответствующими моментами получения сделаны, по существу, постоянными. Синхронизацию между первыми сигналами фазы φ1 и φ2 и вторыми φ1' и φ2' сигналами фазы, вычисленными таким образом, можно улучшить, взяв первое и второе средние между сигналами φ1 и φ2 фазы.
Сигналы P1, P2, P3 и P4 фазы, имеющие разные периоды, генерируются посредством следующих операций из сигналов фазы φ1, φ2, φ1' и φ2'.
P1=φ1'-φ2'
P2=φ1-φ2
P3=φ1'
P4=φ1
Согласно фиг. 8 будет описана процедура для операции инициализации в настоящем иллюстративном варианте осуществления.
Прежде всего, шкала 200 смещения движется в заранее определенном направлении. Регистрируется первое прохождение через нуль сигнала P2 фазы после прохождения через нуль сигнала фазы P1, сразу после этого регистрируется первое прохождение через нуль сигнала P3 фазы, и сразу после этого регистрируется первое прохождение через нуль сигнала фазы P4. Прохождение через нуль сигнала P4 фазы задается как виртуальное начало отсчета.
В ходе операции инициализации схема 401 обработки сигналов, выступающая в роли блока управления, записывает сигналы P1, P2 и P3 фазы в начале отсчета, т.е. P1_offset, P2_offset и P3_offset в запоминающее устройство 402. Обработку инициализации можно осуществлять в любое время помимо, например, времени отгрузки кодера.
Ниже описана процедура синтеза сигнала абсолютной позиции из сигналов периода.
Сначала получаются промежуточные сигналы Q1 и Q2 посредством следующих операций:
Q1=Round [(P1-P1_offset)-(P2-P2_offset)/7]+(P2-P2_offset)/7
Q2=Round [Q1-(P3-P3_offset)/49]+(P3-P3_offset)/49,
где Round [] - это функция для осуществления обработки округления.
Затем сигнал абсолютной позиции S_abs получается следующим образом.
S_abs=Round [Q2-P4/343]+P4/343
Полученный таким образом сигнал абсолютной позиции S_abs выводится из схемы 401 обработки сигналов.
Хотя в настоящем иллюстративном варианте осуществления в порядке примера применяется линейная шкала, для получения аналогичного эффекта можно использовать вращающуюся шкалу. Хотя в настоящем иллюстративном варианте осуществления совокупность шагов регистрации реализована переключением комбинации светоприемных поверхностей для объединения в определенной временной последовательности, светоприемные поверхности, соответственно соответствующие шагам регистрации, можно обеспечивать по отдельности.
Хотя в настоящем иллюстративном варианте осуществления операция арктангенса для генерации сигналов фазы осуществляется на основе волны SIN и волны COS, настоящее изобретение этим не ограничивается. Например, для осуществления определения фазы можно соответственно генерировать три синусоидальные волны с разными фазами, сдвинутыми относительно друг друга на 120 градусов.
При получении синусоидальных сигналов, соответственно, посредством дифференциальных операций сигналов с инвертированной фазой можно использовать другие комбинации светоприемных поверхностей.
Как описано выше, оптический кодер, отвечающий настоящему иллюстративному варианту осуществления, позволяет определять позицию с высокой точностью при определении совокупности сигналов периода, сформированных на одной дорожке, поскольку форма волны, близкая к синусоидальной волне, также получается из любого из сигналов периода.
Хотя, согласно настоящему иллюстративному варианту осуществления, шкала отражательного типа, имеющая распределение коэффициента отражения, включающее в себя позиционную информацию, использует различие в отражательной способности отражателей, настоящее изобретение этим не ограничивается.
Хотя шкала 200 смещения отражательного типа, согласно настоящему иллюстративному варианту осуществления, имеет хромовую отражающую пленку, сформированную в его отражающей области, подлежащей измерению и наблюдению, настоящее изобретение этим не ограничивается.
В качестве конфигурации отражателя можно использовать алюминиевую отражающую пленку или металлическую отражающую деталь отражающей области, подлежащей измерению и наблюдению. Альтернативно, поверхность отражающей области может быть зеркальной поверхностью, а поверхность неотражающей области можно сделать шероховатой, чтобы она была рассеивающей поверхностью.
Хотя в настоящем иллюстративном варианте осуществления дорожки 201 и 202 шкалы относятся к отражательному типу, имея распределение коэффициента отражения, включающее в себя позиционную информацию, настоящее изобретение этим не ограничивается.
Дорожки шкалы согласно настоящему изобретению могут относиться к пропускающему типу, имея распределение коэффициента пропускания, включающее в себя позиционную информацию.
Второй иллюстративный вариант осуществления аналогичен первому иллюстративному варианту осуществления в конфигурации, отличной от шаблона линейной шкалы смещения, и описание других конфигураций и обработки сигналов не повторяется.
Матрицы 311 и 312 светоприемных элементов в настоящем иллюстративном варианте осуществления также предусмотрены для регистрации первой группы сигналов, включающей в себя два сигнала фазы S (A+) и S (A-), находящихся в противофазе друг с другом в течение первого периода модуляции, и второй группы сигналов, включающей в себя два сигнала фазы S (B+) и S (B-), находящихся в противофазе друг с другом в течение второго периода модуляции.
На фиг. 9 показан шаблон шкалы согласно второму иллюстративному варианту осуществления. Первая дорожка 201 имеет прорези отражающей пленки, расположенные эквидистантно с шагом P, равным 100 мкм, при ширине в направлении оси X 50 мкм. Первая дорожка 201 имеет в своем центре область без прорезей отражающей пленки. Расстояние D между прорезями отражающей пленки модулируется для каждых семи прорезей отражающей пленки (период модуляции X0). Максимальное расстояние D_max равно 200 мкм, и минимальное расстояние равно 0 мкм.
Вторая дорожка 202 имеет прорези отражающей пленки, расположенные эквидистантно с шагом P, равным 102,08333 мкм, при ширине в направлении оси X 51,041667 мкм. Вторая дорожка 202 имеет в своем центре область без прорезей отражающей пленки, по аналогии с первой дорожкой 201. Расстояние D между прорезями отражающей пленки модулируется для каждых семи прорезей отражающей пленки. Сенсорный блок 301 располагается так, чтобы всегда считывать диапазон, включающий в себя максимальное расстояние D_max. Остальные два расстояния равны, соответственно, 39,6 мкм и 128,6 мкм.
Четыре синусоидальных выходных сигнала с разными фазами, регистрируемые с шагом регистрации 700 мкм, включают в себя частотные компоненты 6f, 7f и 8f помимо частотного компонента 1f (период 700 мкм). Четыре соседних фотодиода интегрируются для подавления частотного компонента 7f. Кроме того, частотные компоненты 6f и 8f ликвидируются посредством операции S (A+)-S (A-). В результате можно получить синусоидальный выходной сигнал, гармоническая волна которого подавлена, аналогично первому иллюстративному варианту осуществления.
Опишем механизм генерации каждого частотного компонента. Отражающий шаблон шкалы проявляется в сигнале в виде амплитудной модуляции, имеющей тонкий период, модулированной с грубым периодом модуляции, с учетом кумулятивного эффекта в диапазоне чтения за счет ширины приема света фотодиода. В частности генерируются частотные компоненты 7f-1f и 7f+1f.
Таким образом, первый, точный, период модуляции (точный период) является нечетнократным второго, грубого, периода модуляции (грубого периода), благодаря чему ненужные пространственно-частотные компоненты, входящие в состав отраженного дифракционного изображения, могут быть четным гармоническим компонентом грубого пространственно-частотного компонента. Таким образом, ненужные пространственно-частотные компоненты можно совместно удалять посредством дифференциальной операции на следующем каскаде, как в первом иллюстративном варианте осуществления.
Хотя в настоящем иллюстративном варианте осуществления первый, точный, период модуляции (точный период) в семь раз больше второго, грубого, периода модуляции (грубого периода), он может превышать его в пять раз, девять раз и т.д., если он является нечетнократным 2n+1 (n - натуральное число).
На фиг. 10 показана конфигурация оптического кодера вращательного типа согласно третьему иллюстративному варианту осуществления.
Оптический кодер вращательного типа включает в себя вращающуюся шкалу 210 смещения, присоединенную к вращающейся подвижной детали, сенсорный блок 302, присоединенный к неподвижной детали, схему 401 обработки сигналов и запоминающее устройство 402. Схема 401 обработки сигналов осуществляет интерполяционную обработку сигнала кодера, полученного от сенсорного блока 302, записывает сигнал в запоминающее устройство 402 и считывает его оттуда, и выводит сигнал позиции.
На фиг. 11 показана конфигурация дорожек вращающейся шкалы 210 смещения в третьем иллюстративном варианте осуществления. Вращающаяся шкала 210 смещения включает в себя дорожку 204 последовательности максимальной длины (M), включающую в себя шаблон M-последовательности, имеющий позиционную информацию, относящуюся к шкале 210 смещения, и радиальную дорожку 203, имеющую позиционную информацию, относящуюся к шкале 210 смещения.
На фиг. 12 показан увеличенный вид части радиальной дорожки 203.
Радиальная дорожка 203 имеет прорези отражающей пленки, расположенные в ней с равным угловым шагом P. Радиальная дорожка 203 имеет в своем центре область без прорезей отражающей пленки. Расстояние D между прорезями отражающей пленки модулируется для каждых семи прорезей отражающей пленки (период модуляции θ0). Максимальное расстояние D_max равно 200 мкм, и минимальное расстояние равно 0 мкм. Сенсорный блок 302 располагается так, чтобы всегда считывать диапазон, включающий в себя максимальное расстояние D_max. Остальные два расстояния, соответственно, равны 39,6 мкм и 128,6 мкм.
На фиг. 13A и 13B показана конфигурация сенсорного блока 302, где на фиг. 13A показан вид сбоку, и на фиг. 13B показан вид сверху.
Сенсорный блок 302 представляет собой интегрированный сенсорный блок с возможностью приема и излучения света, в котором СИД 310, выступающий в роли источника света, фотодиодная матрица 311 и фотодиодная матрица М-последовательности 313 смонтированы в одном корпусе. Радиальная дорожка 203 и дорожка М-последовательности 204 на вращающейся шкале смещения 210, соответственно, облучаются расходящимися световыми потоками, испускаемыми СИД 310 в сенсорном блоке 302.
Световые потоки, отраженные радиальной дорожкой 203 и дорожкой М-последовательности 204, соответственно отражаются к фотодиодной матрице 311, выступающей в роли матрицы светоприемных элементов, и к фотодиодной матрице М-последовательности 313, выступающей в роли матрицы светоприемных элементов, в сенсорном блоке 302. Распределения коэффициента отражения на радиальной дорожке 203 и на дорожке 204 М-последовательности, соответственно, принимаются как двукратно увеличенные изображения на фотодиодной матрице 311 и фотодиодной матрице М-последовательности 313.
Фотодиодная матрица М-последовательности 313 имеет фотодиоды, ширина которых соответствует двукратно увеличенному изображению, имеющему минимальную линейную ширину M последовательности, размещенной в нем, что позволяет регистрировать M последовательность. Световые потоки, принятые фотодиодной матрицей 311 и фотодиодной матрицей М-последовательности 313, соответственно преобразуются в электрические сигналы, и поступают в качестве сигналов кодера на схему 401 обработки сигналов, показанную на фиг. 1.
Сигнал P1 высокого порядка получается из светового потока, отраженного от дорожки 204 М-последовательности. Сигнал фазы φ1' на радиальной дорожке 203, генерируемый, когда входной сигнал коммутационной схемы находится на низком уровне (шаг регистрации 700 мкм), получается как сигнал P2 промежуточного порядка. Сигнал φ1 фазы на радиальной дорожке 203, генерируемый, когда входной сигнал коммутационной схемы находится на высоком уровне (шаг регистрации 100 мкм), получается как сигнал P3 низкого порядка. Процедура для получения сигнала абсолютной позиции из сигналов P1, P2 и P3 аналогична соответствующей процедуре в первом иллюстративном варианте осуществления 1, и поэтому ее описание не повторяется.
Требование к точности определения абсолютной позиции, полученное благодаря дорожке 204 М-последовательности, снижается за счет генерации сигнала промежуточного порядка P2, что облегчает синтез сигнала абсолютной позиции. В настоящем иллюстративном варианте осуществления достаточно определить позицию с шагом около 700 мкм в направлении периметра. Эффект может иметь место даже, если вращающаяся шкала 210 смещения, например, смещена относительно центра вращения на несколько десятков микрон.
Как описано выше, даже на вращающейся шкале 210 смещения, сигнал промежуточного порядка и сигнал низкого порядка, имеющие мало ошибок интерполяции, также можно генерировать по аналогии с первым иллюстративным вариантом осуществления, что обеспечивает высокоточное определение позиции.
Хотя в настоящем иллюстративном варианте осуществления радиальная дорожка 203 и дорожка 204 М-последовательности относятся к отражательному типу, имея распределение коэффициента отражения, включающее в себя позиционную информацию, настоящее изобретение этим не ограничивается.
Радиальная дорожка 203 и дорожка 204 М-последовательности в настоящем иллюстративном варианте осуществления могут относиться к пропускающему типу, имея распределение коэффициента пропускания, включающее в себя позиционную информацию.
Оптический кодер, отвечающий настоящему изобретению, используется для определения позиционной информации, относящейся к фокусирующей линзе, и позиционной информации, относящейся к трансфокатору, которые входят в состав линзовых устройств, например, фотоаппарата и видеокамеры.
Оптический кодер, отвечающий настоящему изобретению, можно использовать для регистрации позиционной информации, относящейся к линейной шкале смещения или вращающейся шкале смещения, которые входят в состав лазерного принтера и копировального аппарата, где применяется электрофотографический процесс.
Хотя настоящее изобретение описано со ссылкой на иллюстративные варианты осуществления, следует понимать, что изобретение не ограничивается раскрытыми иллюстративными вариантами осуществления. Объем нижеследующей формулы изобретения должен соответствовать самой широкой интерпретации, охватывая все модификации, эквивалентные структуры и функции.







Изобретение относится к оптическому кодеру, предназначенному для определения, в частности, позиционной информации, относящейся к фокусирующей линзе и трансфокатору, входящих в состав линзового устройства. Оптический кодер, в котором распределение коэффициента пропускания или распределение коэффициента отражения, обеспеченное в дорожке шкалы на шкале смещения, имеет первый период модуляции и второй период модуляции в направлении смещения шкалы, матрица светоприемных элементов предназначена для регистрации первой группы сигналов, включающей в себя два сигнала фазы, находящихся в противофазе друг с другом, в течение первого периода модуляции и второй группы сигналов, включающей в себя два сигнала фазы, находящихся в противофазе друг с другом, в течение второго периода модуляции, причем первая позиционная информация в течение первого периода модуляции определяется из первой группы сигналов, и вторая позиционная информация в течение второго периода модуляции определяется из второй группы сигналов, причем второй период модуляции является нечетнократным первого периода модуляции. Технический результат - обеспечение уменьшения ошибочного компонента регистрируемой формы волны и определения позиционной информации с высокой точностью. 2 н. и 3 з.п. ф-лы, 14 ил.
1. Оптический кодер, содержащий:
источник света,
шкалу смещения, включающую в себя дорожку шкалы, имеющую распределение коэффициента пропускания или распределение коэффициента отражения, включающее в себя позиционную информацию, и
матрицу светоприемных элементов, выполненную с возможностью приема светового потока, испускаемого из источника света и пропущенного или отраженного шкалой смещения,
в котором распределение коэффициента пропускания или распределение коэффициента отражения, обеспеченное в дорожке шкалы, имеет первый период модуляции и второй период модуляции в направлении смещения шкалы,
причем матрица светоприемных элементов предназначена для регистрации первой группы сигналов, включающей в себя два сигнала фазы, находящихся в противофазе друг с другом, в течение первого периода модуляции и второй группы сигналов, включающей в себя два сигнала фазы, находящихся в противофазе друг с другом, в течение второго периода модуляции,
причем первая позиционная информация в течение первого периода модуляции определяется из первой группы сигналов, и вторая позиционная информация в течение второго периода модуляции определяется из второй группы сигналов, и
второй период модуляции является нечетным кратным первого периода модуляции.
2. Оптический кодер по п.1,
в котором управление матрицей светоприемных элементов осуществляется посредством комбинации первых электрических соединений для определения первой позиционной информации в течение первого периода модуляции и комбинации вторых электрических соединений для определения второй позиционной информации в течение второго периода модуляции,
причем первая группа сигналов регистрируется комбинацией первых электрических соединений, и вторая группа сигналов регистрируется комбинацией вторых электрических соединений.
3. Оптический кодер по п.1, в котором одна непрерывная совокупная область матрицы в комбинации вторых электрических соединений равна ширине на светоприемной поверхности, соответствующей первому периоду модуляции матрицы светоприемных элементов.
4. Оптический кодер по п.1, в котором полная ширина матрицы светоприемных элементов, входящей в комбинацию первых электрических соединений, является целым кратным шага регистрации, с которым считывается второй период модуляции.
5. Линзовое устройство, содержащее оптический кодер по п.1, в котором оптический кодер определяет позиционную информацию, относящуюся к фокусирующей линзе или трансфокатору.
| US 7348544 В2, 25.03.2008 | |||
| ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ПОВЕРХНОСТИ ОБЪЕКТОВ | 2001 |
|
RU2235973C2 |
| US 7399956 В2, 15.07.2008 | |||
| Цифровой преобразователь перемещения | 1988 |
|
SU1575311A1 |
| 0 |
|
SU330150A1 | |
| JP 4152652 B2, 17.09.2008. | |||

