Область изобретения
Настоящее изобретение относится к накопителям на дисках для записи данных, в частности к записи информации, определяющей местоположение дорожки на дисках для хранения данных.
Накопители на дисках для записи данных предпочтительны при хранении в памяти больших объемов данных для компьютерных систем. Данные хранятся как ряд переходов магнитного поля на поверхности магнитного носителя записи. Переходы формируются на указанной поверхности магнитным преобразователем, обычно называемым магнитной записывающей головкой. Преобразователь преобразует электрическую энергию в магнитное поле, полярность которого переключается согласно информации, которую следует записать. Магнитное поле обеспечивает сохранение намагниченности на носителе после удаления поля. Данные хранятся как двоичная информация в форме изменений полярности, или переходах, сохраняющихся в магнитной среде. Преобразователь, используемый с магнитным носителем записи, может также действовать как детектор для обнаружения данных, запомненных в виде магнитных переходов. Преобразователь воспринимает магнитное поле намагниченной среды. Считанное преобразователем магнитное поле преобразовывается в электрический сигнал, который изменяется в зависимости от полярности магнитного поля. Затем данные, содержащиеся в электрическом сигнале, декодируются. Процесс введения преобразователем данных на носитель записи называется записью данных на носителе. Процесс детектирования преобразователем ранее записанных на носителе данных называется считыванием данных с носителя. В общем случае, системы для хранения данных на магнитном носителе и их восстановления могут использовать одиночный преобразователь для считывания и записи данных, или они могут использовать два преобразователя для считывания и записи соответственно.
Носитель записи имеет форму диска, причем данные обычно записываются на обеих поверхностях. Может быть предусмотрено множество дисков для увеличения суммарной емкости памяти дисковода. Центральное отверстие в носителе обычно представляет собой втулку, с помощью которой носитель записи прикрепляется к двигателю посредством вала шпинделя, вращающего носитель записи. Головка перемещается над поверхностью носителя посредством движения воздуха, создаваемого при вращении диска. Высота перемещения головки должна быть достаточно большой для снижения до минимума вероятности контактирования головки и диска, что могло бы привести к нарушению целостности данных, но одновременно достаточно малой, чтобы магнитное поле, формируемое преобразователем записи, обеспечивало установление магнитных переходов на поверхности носителя записи так, чтобы магнитное поле, сформированное в носителе записи, могло быть считано преобразователем.
Головка размещается в непосредственной близости от поверхности записи и позиционируется над желательной дорожкой данных рычагом исполнительного механизма, к которому она прикреплена с помощью элемента подвески. Рычаг исполнительного механизма (привода) головок перемещает головку радиально относительно поверхности носителя записи из положения вблизи втулки (внутренний диаметр) в положение вблизи края диска (внешний диаметр). Данные обычно записаны на поверхности носителя между внутренним и внешним диаметрами в форме последовательных концентрических дорожек. Ширина дорожки обычно немного превышает ширину преобразователя записи. Концентрические дорожки могут быть подразделены на один или больше секторов.
Головка должна точно устанавливаться над требуемой дорожкой данных при считывании или записи данных. Позиционирование головки обычно выполняется посредством сервоконтроллера исполнительного механизма позиционирования головок, управляющего приводом звуковой катушки, присоединенным к рычагу исполнительного механизма. Сервоконтроллер позиционирования исполнительного механизма использует предварительно записанную информацию позиционирования головки, а также информацию идентификации дорожки и сектора, для перемещения головки от одной дорожки до другой в процессе поиска желательной дорожки и позиционирования головки над центром требуемой дорожки и в соответствующем секторе вдоль этой дорожки. Информация позиционирования и идентификации предварительно записывается на одной или более поверхностей дисков и представляет собой распределения намагниченности, которые изменяются как в радиальном направлении, так и по окружности, чтобы обеспечивать сервоконтроллеру позиционирования исполнительного механизма обратную связь, указывающую текущее положение головки относительно желательной дорожки и сектора.
В зависимости от архитектуры позиционирования дорожек дисковода, информация позиционирования может быть предварительно записана на одной поверхности дисковода с множеством дисковых поверхностей, что обычно определяется как сервосистема со специализированной поверхностью, или на множестве радиальных участков на каждой из дисковых поверхностей, что обычно определяется как сервосистема с встроенным сектором. Дисковод, использующий сервосистему со специализированной поверхностью, устанавливает привод головок, используя информацию, предварительно записанную на отслеживаемой поверхности; положение информационных головок механически приводится приводом головок в позицию следящей головки. Дисковод, использующий сервосистему с встроенным сектором, устанавливает привод головок, используя информацию, предварительно записанную на конкретной поверхности данных, считываемой информационной головкой. В некоторых дисководах используется комбинация двух архитектур. Архитектура сервосистемы с встроенным сектором является предпочтительной для дисководов, имеющих более высокое значение шага дорожки, ввиду меньшей чувствительности в этом случае к механическим и тепловым возмущениям, которые воздействуют на точность позиционирования информационной головки.
Информационная головка должна точно позиционироваться относительно желательной дорожки данных и сектора данных прежде, чем данные пользователя смогут быть записаны или считаны из дисковода. Система позиционирования привода головок осуществляет это путем считывания предварительно записанной информации позиционирования и идентификации и ее использования для изменения положения привода головок. Информация позиционирования и идентификации закодирована на дисковой поверхности в форме некоторого распределения переходов намагниченности, точно определенных по размеру и расстояниям между ними, образующих шаблон для сервосистемы, записанных с высокой точностью как в радиальном направлении, так и по окружности. Для обеспечения требуемой точности позиционирования головок при осуществлении операций считывания и записи данных, эти шаблоны для сервосистемы должны быть записаны с точностью в радиальном направлении такой, чтобы декодируемая позиция в радиальном направлении могла определяться с точностью в пределах малой доли ширины дорожки данных.
Кроме того, точность записи этих шаблонов в направлении по окружности должна быть такой, чтобы относительное позиционирование по окружности от дорожки к дорожке шаблона сервосистемы могло сохранять соответственно малое значение; в наиболее сложных методах кодирования сервосистемы это может потребовать, чтобы относительное позиционирование в направлении по окружности от дорожки к дорожке индивидуальных магнитных переходов сохранялось в пределах малой доли интервала между записанными переходами в указанном направлении.
Эти точно позиционированные шаблоны сервосистемы могут быть записаны на дисковые поверхности до установки дисков в дисковод или после того, как диски будут установлены в дисковод, с использованием процедуры, определяемой как запись шаблона для сервосистемы (сервозапись). В любом случае, требуемая точность радиального позиционирования в процессе сервозаписи обычно обеспечивается с использованием внешнего, управляемого лазерным интерферометром поворотного или линейного исполнительного механизма, механически связанного с дисководом. Требуемая точность позиционирования в направлении по окружности и воспроизводимость от дорожки к дорожке обеспечивается с использованием тактирующей головки (головки синхронизации), устанавливаемой над дисковой поверхностью. Тактирующая головка считывает переходы, разнесенные на приблизительно одинаковые интервалы, предварительно записанные на дорожке на дисковой поверхности. Временное дрожание в сигнале считывания тактирующей головки обычно снижается путем обработки сигнала с использованием узкополосной системы фазовой синхронизации.
Как только соответствующая информация синхронизации дорожки установлена, процедура сервозаписи состоит в позиционировании рычага внешнего исполнительного механизма в последовательных радиальных положениях и записи соответствующих магнитных переходов в множестве позиций в направлении по окружности. Этот процесс чрезвычайно чувствителен к вибрации, вследствие чего должен использоваться большой дорогостоящий гранитный стол для стабилизации дисковода. Процесс также чрезвычайно чувствителен к изменениям температуры окружающей среды, ввиду крупных размеров электромеханической системы, используемый для позиционирования исполнительного механизма. Чтобы минимизировать такие возмущения, процедура обычно выполняется в помещении с контролируемой температурой. Для обеспечения механической связи с исполнительным механизмом и введения дополнительной тактирующей головки в дисковод, дисковод должен оставаться открытым (или предусматривать наличие требуемых отверстий) и негерметизированным в течение указанной процедуры, что требует использования внешней среды с высокой степенью чистоты. Кроме того, последняя процедура сборки, осуществляемая после процесса сервозаписи, может обусловить деформацию основной платы дисковода при присоединении накрывающей платы, что может вызвать наклон вала шпинделя и оси привода головок и ввести рассогласование между шаблонами для сервосистемы на различных дисках. Таким образом, ввиду вышеуказанных причин, процесс сервозаписи является дорогостоящим и подвержен влиянию ошибок.
Последние разработки в области сервозаписи были направлены на решение некоторых из указанных выше проблем. Поворотное кодирующее устройство на полупроводниковом лазере используется для формирования эталонной информации позиционирования. Такой поворотный кодер соединен с рычагом исполнительного механизма посредством поворотной оси вне дисковода. Механическая связь между поворотным кодером и этой осью вращения используется для обеспечения целостности соединения. Опорный синхросигнал генерируется с использованием диска с шаблоном, прикрепленного к части вала шпинделя, выступающей наружу дисковода. Диск с шаблоном имеет светлые и темные сектора, которые отражают падающий свет с различной интенсивностью. Продетектированная комбинация интенсивностей используется для формирования синхросигнала.
Хотя система сервозаписи с поворотным кодером устраняет необходимость использования чистого производственного помещения и гранитного стола, однако она обладает некоторыми собственными недостатками. Во-первых, механическая связь, требуемая между поворотным кодером на полупроводниковом лазере и рычагом исполнительного механизма, дополнительно увеличивает стоимость дисковода и сложность процесса сервозаписи, а также ограничивает достижимую точность. Во-вторых, для вывода вовне вала шпинделя с целью формирования опорного синхросигнала, требуется двойная герметизированная опора, что вновь увеличивает стоимость дисковода. В-третьих, опорный синхросигнал, сформированный диском с шаблоном, недостаточно точен для использования в дисководе с высокой плотностью записи.
В патенте Японии JP-A-4351766 раскрыт дисковод жесткого диска, обеспечивающий повышение точности записи и увеличение скорости записи за счет использования дифрагированного света, формируемого дифракционной решеткой, предусмотренной в подвижном элементе, перемещаемом заодно вместе с головкой, вне корпуса, чтобы устранить проблему излишнего нагружения головки и изменения ее состояния между записью и использованием. Свет, дифрагированный дифракционной решеткой, предусмотренной на рычаге головки, поступает к внешней оптической системе корпуса, что позволяет устранить проблему, подобную приложению избыточной нагрузки к головке и изменению ее состояния между записью и использованием. Часть 1а апертуры корпуса закрыта светопрозрачным материалом для сохранения воздушной герметизации и исключения изменения состояния между однократной записью шаблона для сервосистемы и использованием, вследствие необходимости открытия и закрытия крышки. Дифракционная решетка свободно прикрепляется и снимается и может использоваться многократно, не требуя оптической системы для определения положения головки, например, отражательного типа. Таким образом, возможно использование не обязательно в условиях чистого производственного помещения; кроме того, стоимость уменьшается, точность записи улучшается и быстродействие записи увеличивается. В патенте Японии JP-A-4351767 описано устройство для записи сигнала сервосистемы, позволяющее улучшить точность записи и увеличить быстродействие записи путем обнаружения положения дифракционной решетки, предусмотренной на рычаге головки, оптической системой и управления головкой на основе продетектированного сигнала этой оптической системы для записи сигнала сервосистемы и исключения избыточной нагрузки на головку и изменения условий использования. Рычаг головки снабжен дифракционной решеткой, а корпус имеет часть 1a апертуры, закрытую светопрозрачным материалом для сохранения воздушной герметизации. Оптическая система для обнаружения положения имеет источник света и оптические средства обнаружения, обеспечивая определение положения головки с использованием отраженного от дифракционной решетки света. Устройство записи сигнала сервосистемы и контроллер используют этот сигнал обнаружения для управления двигателем и приводом звуковой катушки (катушки линейного электропривода), причем устройство записи записывает сигнал сервопривода на диске посредством головки. Тем самым решается проблема, вызванная приложением избыточной нагрузки к головке и изменением условий при записи и использовании, точность записи улучшается и быстродействие записи повышается.
Таким образом, существовала не удовлетворенная ранее потребность в системе сервозаписи, которая не требует вмешательства в конструкцию, применения механической связи с приводом головок или шпинделем вращающегося диска и обеспечивает достаточную эффективность при использовании в современных накопителях с высокой плотностью записи данных на дисках. Настоящее изобретение направлено на удовлетворение этой потребности.
Сущность изобретения
Согласно изобретению, предлагается система сервозаписи, которая использует полупроводниковые лазеры, размещенные вне дисковода, и отражательные дифракционные решетки, прикрепленные внутри дисковода, для выработки сигналов точного позиционирования. Один лазер излучает луч, направленный через светопрозрачное окно, к дифракционной решетке, присоединенной к рычагу привода головок, в то время как второй лазер излучает луч, направленный через светопрозрачное окно, к дифракционной решетке, присоединенной к валу шпинделя. Дифракционные картины, отраженные от дифракционных решеток, направляются к оптическим детектирующим элементам, которые преобразуют их в электрические сигналы. Сигнал из оптической системы привода головок принимается электронными средствами декодирования положения привода головок, которые преобразуют его в сигнал позиционирования привода головок. Сигнал из оптической системы вала шпинделя, т. е. сигнал синхронизации, принимается электронными средствами детектирования синхросигнала записи, которые преобразуют его в опорный синхросигнал. Сигнал позиционирования и опорный синхросигнал используются для определения положения рычага привода головок и пакета дисков. Затем электронные средства принимают эти сигналы и используют их, чтобы координировать позиционирование рычага привода головок с записью информации сервосистемы на поверхностях дисков.
Система сервозаписи, соответствующая изобретению, включает две основные подсистемы: подсистему позиционирования привода головок и подсистему синхронизации записи. Подсистема позиционирования привода головок содержит полупроводниковый лазер и дифракционную решетку, присоединенную к рычагу привода головок, вместе с оптическими элементами восстановления, которые компенсируют изменения в оптическом пути, и оптическими элементами детектирования, которые измеряют разности фаз в дифракционной картине, отраженной от дифракционной решетки. Подсистема позиционирования привода головок также содержит электронные средства декодирования сигнала положения привода головок, которые получают измеренные разности фаз и преобразуют их в сигнал положения рычага привода головок. В предпочтительном варианте осуществления электронные средства декодирования сигнала положения привода головок содержит электронные средства грубого декодирования, которые обеспечивают сигнал грубого положения привода головок, и электронные средства точного декодирования, которые вырабатывают сигнал точного положения привода головок. Сигналы грубого и точного положения привода головок затем объединяются для определения положения рычага привода головок.
Подсистема синхронизации записи содержит второй полупроводниковый лазер и дифракционную решетку, присоединенную к валу шпинделя, а также оптические элементы восстановления, которые компенсируют изменения в оптическом пути, и оптические элементы детектирования, которые измеряют разности фаз в дифракционной картине, отраженной от дифракционной решетки. Подсистема синхронизации записи также включает электронные средства детектирования синхросигналов записи, которые получают измеренные разности фаз и преобразуют их в опорный синхросигнал. В предпочтительном варианте осуществления электронные средства детектирования синхросигнала записи включает электронные средства обнаружения необработанного синхросигнала, а также электронные средства корректировки синхронизации, которые компенсируют ошибку центрирования дифракционной решетки по отношению к центру вращения вала шпинделя. В другом варианте осуществления подсистема синхронизации записи может быть выполнена с использованием сдвоенной оптической системы полупроводниковых лазеров и оптических элементов детектирования, установленных соответственно на противоположных сторонах, если дифракционная решетка центрирована относительно каждой из этих систем. Электронные средства смешения используются для объединения двух опорных синхросигналов для формирования опорного синхросигнала, в котором скомпенсирована ошибка центрирования дифракционной решетки.
С помощью полупроводниковых лазеров, установленных вне дисковода, наряду с оптическими и электронными средствами детектирования и вычисления точной информации позиционирования, представленное изобретение обеспечивает систему сервозаписи, которая не требует вмешательства в конструкцию, использования какой-либо механической связи с приводом головок или шпинделем вращающегося диска и обеспечивает точность позиционирования, требуемую для использования в дисководах с высокой плотностью записи на дисках. Единственные элементы системы, установленные внутри корпуса дисковода, радиальные дифракционные решетки, имеют малый вес и недороги; они могут прикрепляться в процесса производства до герметизации дисковода и оставаться в дисководе после завершения сервозаписи.
Краткое описание чертежей
Фиг. 1a иллюстрирует в форме блок-схемы функциональные компоненты системы сервозаписи, соответствующей настоящему изобретению.
Фиг. 1b иллюстрирует в схематичном виде размещение дифракционных решеток в накопителе на дисках для записи данных, согласно настоящему изобретению.
Фиг. 2a иллюстрирует в форме блок-схемы подсистему позиционирования привода головок, соответствующую настоящему изобретению.
Фиг. 2b иллюстрирует линейную дифракционную решетку для использования с подсистемой позиционирования привода головок.
Фиг. 2c иллюстрирует радиальную дифракционную решетку для использования в подсистеме позиционирования привода головок.
Фиг. 3 иллюстрирует вид в сечении датчика положения привода головок для использования с линейной дифракционной решеткой согласно изобретению.
Фиг. 4 иллюстрирует вид в сечении датчика положения привода головок для использования с радиальной дифракционной решеткой согласно изобретению.
Фиг. 5a иллюстрирует в графической форме выходные аналоговые сигналы фотодетекторов датчика положения привода головок.
Фиг. 5b иллюстрирует в графической форме входной сигнал квадратурного счетчика циклов.
Фиг. 5с иллюстрирует в графической форме информацию точного позиционирования, используемую датчиком положения привода головок.
Фиг. 6 иллюстрирует в форме блок-схемы электронные средства декодирования положения привода головок, используемые в системе сервозаписи согласно настоящему изобретению.
Фиг. 7a иллюстрирует в форме блок-схемы подсистему синхронизации записи согласно настоящему изобретению.
Фиг. 7b иллюстрирует радиальную дифракционную решетку для использования в подсистеме синхронизации записи.
Фиг. 8 иллюстрирует вид в сечении датчика опорного синхросигнала для использования с радиальной дифракционной решеткой согласно изобретению.
Фиг. 9 иллюстрирует в форме блок-схемы электронные средства детектирования синхросигналов записи для системы сервозаписи согласно настоящему изобретению.
Фиг. 10 иллюстрирует временные диаграммы сигналов, формируемых квадратурным генератором пилообразного сигнала.
Фиг. 11 иллюстрирует в форме блок-схемы альтернативный вариант осуществления подсистемы синхронизации записи, использующую две оптических головки синхронизации и электронный смеситель.
Фиг. 12 иллюстрирует вид в сечении оптических средств реконструкции волнового фронта для использования с линейной дифракционной решеткой.
Фиг. 13 иллюстрирует вид в сечении оптических средств реконструкции волнового фронта для использования с радиальной дифракционной решеткой.
Фиг. 14 иллюстрирует вид в сечении компрессора луча для использования с оптическими средствами реконструкции волнового фронта.
Детальное описание вариантов осуществления изобретения
1. Система сервозаписи
На фиг. 1a показана блок-схема, иллюстрирующая систему сервозаписи согласно настоящему изобретению при использовании с накопителями на дисках (дисководами) для записи данных. Дисковод 102 содержит корпус 103 с пакетом дисков на шпинделе, включающим один или более дисков 104, вал 106 шпинделя и двигатель 108 шпинделя. Дисковод 102 также включает контроллер 110 скорости шпинделя, усилитель считывания/записи 144, оптически прозрачные окна 122 и 132, расположенные в корпусе 103 над дифракционными решетками 120a и 130, соответственно, и привод головок, который включает в себя одну или более магнитных головок записи 112, поворотный рычаг 114 привода головок (который также включает в себя необходимый узел подвески), ось поворота 116 рычага привода головок (иногда также называемую "E-блоком" или "E-пластиной") и двигатель 118 звуковой катушки.
Корпус 103 окружает высокоточные хрупкие компоненты дисковода и защищает их от загрязнения и возможных повреждений. Он обычно включает в себя основание и крышку (не показаны) хотя возможны и различные другие эквивалентные конфигурации. Часто двигатель 108 шпинделя дисковода устанавливается в основании и, таким образом, образует единую конструкцию с защитным корпусом 103. Следует отметить, что все эти незначительные изменения охватываются примером осуществления, показанным на фиг. 1a и описанным выше, так же как и заявленным изобретением.
На фиг. 1b показан вид сверху внутрь дисковода 102, иллюстрирующий размещение и позиционирование различных компонентов, включая дифракционные решетки, используемые в процессе сервозаписи. Он содержит один или более дисков 104 вышеупомянутого пакета на шпинделе дисковода, поворотный рычаг 114 привода головок, ось вращения 116 рычага привода головок, и двигатель 118 звуковой катушки вышеописанного привода головок, упоры. 150 и 151 привода головок, дифракционную решетку 120a привода головок и дифракционную решетку 130 синхронизации записи. Следует отметить, что в то время как дифракционные решетки присоединены к приводу головок и к пакету шпинделя, однако ни подсистема позиционирования привода головок, ни подсистема синхронизации записи не требует никакого дополнительного механического присоединения к приводу головок или пакету шпинделя. Только оптическая и электрическая связь используется для обмена данными между подсистемой позиционирования привода головок и приводом головок и между подсистемой синхронизации записи и пакетом шпинделя дисковода. В этом состоит отличие изобретения от предшествующего уровня техники, где оптические кодеры механически присоединяются к пакету шпинделя дисковода и к приводу головок. Также следует отметить, что в то время как дифракционная решетка привода головок показана присоединенной к приводу головок, она, как вариант, может присоединяться к любому конструктивному элементу привода головок, например к маленькому фланцу или иному выступу. Кроме того, одна или обе дифракционные решетки могут присоединяться временно для целей сервозаписи, а затем удаляться. В некоторых случаях, это может допускать выбор дифракционных решеток из более широкого их класса, чем это было бы возможно в противном случае (ввиду ограничений по размеру, весу, и стоимости), если бы они должны были оставаться в дисководе постоянно.
Как показано на фиг. 1a, система сервозаписи включает подсистему позиционирования привода, подсистему синхронизации записи, контроллер сервозаписи 140 и генератор 142 шаблонов синхрозаписи, которые взаимодействуют для обеспечения записи точно позиционированных (как по радиусу, так и по окружности) магнитных переходов в виде конкретных распределений на одной или более поверхностях дисков для точного кодирования информации позиционирования сервосистемы. Подсистема позиционирования привода головок включает в себя оптический датчик 124 положения привода головок, дифракционную решетку 120a, оптическое окно 122, систему декодирования 126 сигнала датчика положения привода головок, контроллер 128 положения привода головок, двигатель 118 звуковой катушки привода головок и рычаг 114 привода головок, которые точно устанавливают одну или более магнитных головок записи 112 радиально над соответствующими поверхностями 104 диска, на которые нужно осуществить сервозапись. Подсистема синхронизации записи включает в себя оптический датчик 134 синхросигнала, дифракционную решетку 130, оптическое окно 132 и электронные средства 136 обработки синхросигнала записи, которые генерируют точный сигнал синхронизации записи и сигнал синхронизации индекса диска, который "синхронизирован по фазе" с дисковой поверхностью (поверхностями).
Надежные механические средства крепления (не показаны) используется для фиксации положения дисковода 102, оптического датчика 124 положения привода головок и оптического датчика 134 синхросигнала относительно друг друга. Механические средства крепления также изолированы от внешних механических и тепловых возмущений, которые могли бы ухудшить точность записанных распределений намагниченности. Эти средства крепления могут выполняться с использованием многих известных компонентов в соответствии с хорошо известными принципами инженерного проектирования и не требуют детального описания. Следует отметить, однако, что гранитный стол такой, как требуется в предшествующем уровне техники, нет необходимости использовать для обеспечения гарантированной точности записи.
В процессе функционирования контроллер 140 сервозаписи управляет контроллером 128 положения привода головок для позиционирования привода 114 головок и связанных с ним головок записи 112 в желательном радиальном положении на дисковой поверхности, где должны быть записаны упоминавшиеся магнитные распределения (шаблоны для сервосистемы). Контроллер 140 сервозаписи также управляет генератором 142 шаблонов записи 142, усилителем считывания/записи 144 и одной или более магнитных головок для записи требуемого распределения магнитных переходов на одной или более поверхностях дисков. Точные радиальные положения записанных магнитных переходов управляются подсистемой позиционирования привода головок, которая формирует сигналы требуемого радиального положения привода головок, используемые для точного позиционирования головки записи. Точные положения по окружности записанных магнитных переходов управляются подсистемой записи синхросигнала, которая формирует требуемые сигналы синхронизации и дисковые индексные сигналы, используемые для точной синхронизации комбинации данных, запомненной в генераторе шаблонов 142.
Контроллер 140 сервозаписи вместе с подсистемой синхронизации записи и усилителем считывания/записи 144 осуществляет последовательный выбор магнитной головки записи и, тем самым, дисковой поверхности, на которую следует осуществить запись шаблона для сервосистемы. Одна или более поверхностей дисков может быть использована для сервозаписи в течение любого заданного поворота диска. Процесс повторяется для множества последовательных радиальных позиций, пока необходимое множество магнитных переходов не будет записано на одной или более дисковых поверхностей. Таким способом осуществляется точная запись в радиальном направлении и по окружности магнитных шаблонов, как это требуется для кодирования информации позиционирования для сервосистемы.
Следует отметить, что при соответствующем выборе формы дифракционной решетки 120a привода головок, настоящее изобретение одинаково применимо для дисководов, использующих поворотные приводы головок, линейные приводы головок, или приводы головок, которые формируют комбинацию линейного и радиального движения, такие как приводы с пластинчатой пружиной, выполненные с использованием параллелограммной конструкции.
Информация позиционирования для сервосистемы, упомянутая выше, может быть закодирована с использованием любого из методов, хорошо известных в уровне техники. Например, номер дорожки может быть закодирован с использованием кода Грея, а информация точного позиционирования следящей системы может быть закодирована с использованием квадратурных импульсных комбинаций. Весь процесс сервозаписи может выполняться на полностью собранном и герметизированном дисководе, не требуя высокой чистоты производственного помещения, так как требуется только оптический и электрический доступ к дисководу 102. Не требуется никакая механическая связь или физический доступ к двигателю шпинделя или рычагу привода головок. Также, компактность оптического датчика положения привода головок, оптического датчика синхросигнала записи и конструкция современного дисковода делают процедуру сервозаписи менее чувствительной к механическим и тепловым возмущениям и более простой относительно стандартных методов сервозаписи.
II. Подсистема позиционирования привода головок
На фиг. 2a показана подсистема позиционирования привода головок согласно настоящему изобретению, включающая в себя оптический датчик 124 положения привода головок, состоящий из полупроводникового лазерного источника 200, дефлектора 206 лазерного луча и оптических средств детектирования 202 и 204, а также дифракционную решетку 120a, оптическое окно 122, систему декодирования 126 сигнала датчика положения привода головок, контроллер 128 положения привода головок, двигатель звуковой катушки 118 привода головок и рычаг 114 привода головок.
Как будет более детально описано ниже, подсистема может быть использована как с линейной, так и с радиальной дифракционной решеткой в позиции 120a путем изменения конструкции оптического датчика 124 положения привода.
А. Оптический датчик положения
Оптический датчик 124 положения привода использует источник света 200 на полупроводниковом лазере. В общем случае полупроводниковые лазеры обнаруживают дрейф длины волны в зависимости от времени и температуры, что ограничивает возможности их использования в классических интерферометрах определения расстояния. Однако датчик положения привода в настоящем изобретении нечувствителен к дрейфу длины волны, так как измерение положения дифракционной решетки определяется шагом строки дифракционной решетки и изменением относительной фазы между лазерными лучами +1 и -1 порядков дифракции. Кроме того, в противоположность обычным лазерным интерферометрическим системам измерения положения, которые используют луч двухчастотного источника для разрешения неоднозначности по направлению движения, настоящее изобретение использует только луч одночастотного лазера для определения направления движения.
Плоская отражательная дифракционная решетка 120a может быть как линейной, так и радиальной, в зависимости от конструкции датчика 124 положения привода. Линейная дифракционная решетка, схематично показанная на фиг. 2b, имеет параллельные дифракционные линии с постоянным шагом и глубиной. Дифракционная решетка 120a, в общем случае в форме углового сегмента, достаточно широка для соответствия диаметру лучей лазера, поступающих из датчика 124 положения привода, и имеет достаточную длину доя соответствия углу качания привода головок. Дифракционная решетка поворачивается вокруг точки 230, которая совпадает с центром вращения оси привода головок. На фиг.2a дифракционная решетка показана присоединенной к рычагу 114 привода головок на стороне магнитной головки оси поворота 116 привода головок, но может размещаться на стороне звуковой катушки или в каком-либо ином месте на приводе головок с тем же результатом.
Радиальная дифракционная решетка, показанная схематично на фиг. 2c, имеет радиальные дифракционные линии, которые сходятся в точке 230, совпадающей с центром вращения оси 116 привода головок. Линейная дифракционная решетка имеет шаг, приблизительно равный удвоенной длине волны лазерного луча, и глубину, приблизительно равную 1/4 длины волны лазерного луча. Аналогично, радиальная дифракционная решетка в радиальном положении, где лазерный луч падает на ее поверхность, имеет шаг, приблизительно равный удвоенной длине волны лазерного луча, и глубину, приблизительно равную 1/4 длины волны лазерного луча. Чтобы максимизировать эффективность оптического датчика положения, глубина дифракционной решетки и цикл режима работы выбирается так, чтобы минимизировать интенсивность отражения сигнала 0-го порядка и максимизировать интенсивность отражений сигнала 1-го порядка. Шаг дифракционной решетка выбирается так, чтобы обеспечивать угол пучка 1-го порядка дифракции, который достаточно велик для адекватного отделения луча 1-го порядка дифракции от падающего лазерного луча и недостаточно велик для того, чтобы воздействовать на способность отделения луча 1-го порядка дифракции от лучей более высоких порядков дифракции.
Точные эталонные дифракционные решетки, имеющие желательные характеристики могут изготавливаться рядом известных методов, включая голографию, фотолитографию, литографию электронным пучком, травление электронным пучком и штриховальной машиной. Соответственно тонкие, дешевые и точные копии дифракционных решеток, имеющие желательный размер и форму, могут производиться в массовых масштабах с помощью ряда известных методов, включая 2P- фотополимеризацию, эпоксидное дублирование, формование и тиснение на ряде материалов подложки, например на металле, стекле, пластмассе и полимерах. Копируемые дифракционные решетки изготавливаются высокоотражающими на желательной длине волны лазерного луча с использованием известных методов, например нанесением соответствующей тонкой металлической пленки или нанесением одного или более диэлектрических слоев, имеющих соответствующую толщину и диэлектрическую постоянную. Чтобы минимизировать потенциальные отрицательные влияния на эффективность привода головок, вызванные добавляемой массой дифракционной решетки, выгодно использовать маленькую дифракционную решетку и выбирать подложку с низкой плотностью или даже предпочтительно наносить дифракционную решетку непосредственно на поверхность привода головок, как показано в фиг. 1b.
На фиг. 3 показан схематичный вид в сечении, иллюстрирующий детальную конструкцию датчика 124 положения привода для использования с линейной дифракционной решеткой согласно настоящему изобретению. Конструкция включает полупроводниковый лазер 200, коллиматорную линзу 304, поляризатор 306, поляризационный делитель луча 308 и четвертьволновую пластину 309, которые образуют источник лазерного пучка: сферические линзы 320 и 326, поляризаторы 322 и 328, зеркала 324 и 330, которые образуют два 1X телескопа; а также четвертьволновую пластину 311, неполяризационный 50% делитель луча 310, поляризаторы 312 и 316 и фотодетекторы 314 и 318, которые образуют оптические средства детектирования. Что касается полупроводникового лазера 200, следует отметить, что полупроводниковый лазер предпочтителен вследствие его благоприятных характеристик стоимости и габаритов, однако могут использоваться и другие типы лазеров.
При функционировании датчика 124 положения привода, полупроводниковый лазер 200 излучает главным образом линейно поляризованный лазерный световой пучок, который собирается и коллимируется коллиматорной линзой 304. Поляризатор 306 передает предпочтительно р-поляризованный пучок, а поляризационный делитель 308 направляет результирующий лазерный луч к линейной дифракционной решетке 120b через четвертьволновую пластину 309. Четвертьволновая пластина 309 преобразовывает линейно поляризованный лазерный луч в лазерный луч с круговой поляризацией. Результирующий лазерный луч падает на дифракционную решетку 120b по нормали и дифрагируется. Дифракционная решетка 120b выполнена так, чтобы дифрагировать основную часть луча с образованием лучей +1 и -1 порядка дифракции. Дифракционная решетка 120b размещается в плоскости, ортогональной к входному лазерному лучу, причем строки дифракционной решетки ориентированы так, что дифрагированные лазерные лучи +1 и -1 порядков дифракции направляются на линзы 320 и 326 соответственно. Угол θ луча 1-ого порядка дифракции может вычисляться из уравнения sin θ = +(-d)λ, где d - шаг дифракционной решетки и λ - лазерная длина волны.
Сферическая линза 320, поляризатор 322 и зеркало 324 образуют оптические средства типа 1X телескопа для восстановления лазерного луча для дифрагированного луча +1 порядка дифракции; 1X телескоп будет подробно описан ниже. В принципе, луч +1-го порядка дифракции фокусируется на зеркале 324 через поляризатор 322 сферической линзой 320 и отражается обратно на дифракционную решетку 120b как повторно коллимированный луч. Функцией поляризатора 322 является передача только p-поляризованной части луча +1-го порядка дифракции. Аналогично, сферическая линза 326, поляризатор 320 и зеркало 330 образуют оптические средства типа 1X телескопа для восстановления луча -1-го порядка дифракции. Луч -1-го порядка дифракции фокусируется на зеркале 330 через поляризатор 328 сферической линзой 326 и отражается обратно к дифракционной решетке 120b как повторно коллимированный луч. Функция поляризатора 320 состоит в передаче только s-поляризованной части луча -1-го порядка дифракции. Зеркала 324, 330, поляризаторы 322, 328 и линзы 320, 326 устанавливаются и юстируются так, что возвращенные лучи +1-го и -1-го порядков перекрываются на дифракционной решетке 120b в положении, смещенном относительно места падения лазерного луча на дифракционную решетку, так что два луча коллинеарны от дифракционной решетки до оптических средств детектирования, и аберрации результирующего волнового фронта минимизируются.
Эти коллимированные лучи +1-го и -1-го порядков дифрации, возвращенные к дифракционной решетке 120b, дифрагируются нормально к ее поверхности в направлении четвертьволновой пластины 311. Четвертьволновая пластина 311, неполяризационный 50% делитель луча 310, поляризаторы 312 и 316 и фотодетекторы 314 и 310 образуют оптические средства, детектирующие результирующие лазерные лучи. Четветьволновая пластина 311 преобразует p- поляризованный лазерный луч +1-го порядка дифракции и s- поляризованный лазерный луч -1-го порядка дифракции в лазерные лучи правой и левой поляризации соответственно. Результирующий лазерный луч эквивалентен линейно поляризованному лазерному лучу с направлением поляризации, определенным относительной разностью фаз между дифрагированными лазерными лучами +1-го и -1-го порядков дифракции.
Половина результирующего лазерного луча проходит через неполяризационный делитель луча 310, пластину поляризатора 316 и падает на фотодетекторе 318. Фотодетектор 318 измеряет интенсивность лазерного луча, переданного через пластину поляризатора 316. Другая половина результирующего лазерного луча отражается неполяризационным делителем луча 310, проходит через пластину поляризатора 312 и падает на фотодетектор 314. Фотодетектор 314 измеряет интенсивность лазерного луча, переданного через пластину поляризатора 312.
Перемещение дифракционной решетки 120b в плоскости, ортогональной к входному лазерному лучу, приводит к тому, что фаза дифрагированного лазерного луча +1-го порядка дифракции опережает или запаздывает относительно фазы дифрагированного лазерного луча -1-го порядка дифракции. Опережение или запаздывание фазы определяется направлением движения. Разность фаз между лазерными лучами +1-го и -1-го порядка дифракции прямо порциональна смещению дифракционной решетки в пределах цикла сигнала.
Фотодетекторы 314 и 318 генерируют сигналы электрического тока, которые изменяются синусоидально в зависимости от смещения дифракционной решетки 120b. Две пластины поляризатора 312 и 316 выравниваются так, чтобы их направления поляризации были повернуты на 45 градусов относительно плоскости, ортогональной падающему лазерному лучу. Это приводит к сдвигу электрической фазы приблизительно на 90 градусов между сигналами двух фотодетекторов, который используется для определения направления перемещения дифракционной решетки 120b. Сравниваемая амплитуда, квадратурные сигналы электрического тока декодируются для определения положения дифракционной решетки и направления перемещения.
Датчик 124 положения привода может использоваться для обнаружения перемещения дифракционной решетки 120b в плоскости, параллельной ее поверхности, имеющей компонент, ортогональный к линиям дифракционной решетки. Когда дифракционная решетка 120b перемещается прямолинейно, как в случае, если она присоединена к линейному приводу головок, лазерные лучи, падающие на линзы 320 и 326, стационарны. Однако, когда дифракционная решетка 120b перемещается, описывая дугу, как в случае, если она присоединена к поворотному приводу головок, лазерные лучи, падающие на линзы 320 и 326, также описывают дуги в соответствующих им плоскостям. Следовательно, лазерные лучи, переданные к зеркалам 324 и 330, также описывают дуги в соответствующих им плоскостям. 1X телескопы компенсируют результирующие изменения в оптическом пути дифрагированных лазерных лучей для сохранения коллинеарности результирующих лазерных лучей, направленных к оптическим средствам детектирования. Максимальная угловая длина дуги и, таким образом, максимальный возможный угол поворота привода головок определяется диаметром компонентов, образующих два 1X телескопа, качеством волнового фронта результирующего лазерного луча, падающего на оптические средства детектирования, и размером дифракционной решетки. На практике качество волнового фронта результирующего лазерного луча определяется прежде всего конструкцией линз 320 и 326 и качеством волнового фронта исходного лазерного луча.
Стабильность лазерного луча полупроводниковых лазеров, как известно, чувствительна даже к малым отражениям лазерного луча, попадающим обратно в оптический резонатор. Для минимизации интенсивности лазерного луча, отраженного обратно к лазеру, согласно предложенному изобретению, все поверхности оптических компонентов имеют противоотражающее покрытие. Кроме того, поляризатор 306, поляризационный делитель луча 308 и четвертьволновая пластина 309 функционируют так, чтобы дополнительно изолировать лазер от лазерного луча 0-го порядка, отраженного от поверхности дифракционной решетки. Противоотражающие покрытия также служат для оптимизации отношения сигнал/шум электрических сигналов, формируемых фотодетекторами, усиливая интенсивность продетектированного лазерного луча и минимизируя интенсивность паразитных лазерных лучей, отраженных от различных оптических компонентов. В предпочтительном варианте осуществления используется коллимированный лазерный луч с относительно большим диаметром (от 0,5 мм до 5 мм) в конструкции оптического датчика 124 положения привода для того, чтобы облегчить юстировку оптических компонентов, максимизировать коллинеарность лазерных лучей +1-го и -1-го порядков дифракции, возвращаемых к оптическим средствам детектирования, уменьшить чувствительность к разъюстировке компонентов и уменьшить чувствительность к дефектам дифракционной решетки. Допуска оптической головки привода по отношению к дефектам дифракционной решетки уменьшают стоимость дифракционной решетки, обеспечивают возможность более широкого выбора подходящих методов копирования при изготовлении и увеличивают выход годных изделий.
На фиг. 4 представлена схема, иллюстрирующая конструкцию датчика 124 положения привода для использования с радиальной дифракционной решеткой 120c, согласно настоящему изобретению. Конструкция и принцип работы аналогичны описанным выше для датчика положения привода в случае линейной дифракционной решетки, за исключением того, что плоские зеркала 324 и 330 заменены призмами 424 и 430 и линейная дифракционная решетка 120a заменена радиальной дифракционной решеткой 120c. Дифрагированные лазерные лучи +1-го и -1-го порядка дифракции, падающие на призмы 424 и 430, соответственно, являются стационарными, когда радиальная дифракционная решетка описывает дугу, при условии, что дифракционные линии радиальной дифракционной решетки сходятся точно в точке непосредственно над центром вращения 116 поворотного привода головок.
Принципиально важно, чтобы точка, в который сходятся дифракционные линии решетки, была коллинеарной с осью вращения привода головок, чтобы 1X телескопы адекватно компенсировали оптические аберрации. Эквивалентным образом ориентация плоскости, определяемой двумя 1X телескопами, должна быть ортогональна к линиям радиальной дифракционной решетки, освещаемой падающим лазерным лучом. Если ошибка юстировки между осью поворота привода головок и точкой, в которой сходятся радиальные дифракционные линии, становится недопустимо большой при повороте радиальной дифракционной решетки, то может быть использована электромеханическая система для поддержания оптической головки ортогонально радиальным дифракционным линиям, обеспечивая тем самым достижение требуемой ориентации.
В. Электронные средства декодирования сигнала датчика положения привода головок
Электронные средства 126 (фиг. 1) декодирования сигнала оптического датчика положения привода включают в себя электронные средства детектирования сигнала, электронные средства декодирования и используют определенный алгоритм декодирования. На фиг.5a представлено изменение во времени синусоидальных сигналов на входе электронных средств декодирования сигнала оптического датчика положения привода. Вертикальная ось указанной временной зависимости соответствует сигналу электрического тока; горизонтальная ось - шкале положений дифракционной решетки. Сигналы электрического тока 520 и 521 вырабатываются фотодетекторами 314 и 318 при использовании линейной дифракционной решетки для определения положения привода головок, или фотодетекторами 414 и 410 при использовании радиальной дифракционной решетки для определения положения привода головок. Сигналы электрического тока проходят один полный цикл, когда дифракционная решетка перемещается на расстояние равное 1/4 шага дифракционной решетки. Сигналы электрического тока полностью описываются амплитудами Aq и Ap, смещениями по постоянному току (DC-смещениями) Bq и Bp и фазовым углом Φ.
Вследствие допусков на оптические компоненты и юстировку, соответствующие параметры для двух сигналов в общем имеют сравнимую величину, но не идентичны, а фазовый угол Φ приблизительно равен 90 градусов. Кроме того, параметры, описывающие форму волны сигнала, будут в некоторой степени зависеть от положения дифракционной решетки вследствие вариаций эффективности дифракционной решетки по пространству, изменений качества волнового фронта и отклонений от коллинеарности дифрагированных лучей +1-го и -1-го порядка дифракции, возвращаемых к фотодетекторам. Большинство из этих эффектов представлены до некоторой степени в используемой на практике экономичной конструкции. Оптический датчик положения привода и дифракционная решетка разработаны так, чтобы минимизировать изменения параметров, обусловленные положением дифракционной решетки, при максимизации экономичности и эффективности конструкции. Электронные средства декодирования сигнала положения привода головок, в свою очередь, разработаны так, чтобы обеспечивать компенсацию неидеальных сигналов, вырабатываемых используемыми на практике конструкциями дифракционных решеток и оптическими головками привода головок.
На фиг. 6 представлена блок-схема, иллюстрирующая электронные средства декодирования сигналов оптического датчика привода головок. Они включают в себя фотодетекторы 314 и 318, усилители 602 и 652, суммирующие усилители 604 и 654, аналого-цифровые преобразователи (АЦП) 608 и 658, детекторы смещения 610 и 660, цифровые делители 616 и 666, цифровые сумматоры 618 и 668, память с произвольным доступом (ОЗУ) 622 и 672, цифро-аналоговые преобразователи (ЦАП) 620 и 670, квадратурный счетчик 674 и блок обработки 678.
В процессе функционирования, сигнал электрического тока низкого уровня 520, выработанный фотодетектором 314, усиливается усилителем 652.
Полученный сигнал с усилителя 652 суммируется с сигналом 690 в суммирующем усилителе 654 и затем преобразуется в цифровую форму в АЦП 658. Сигнал 690 компенсации ухода DC-смещения имеет амплитуду, которая компенсирует уход DC-смещения Bq. Аналогично, сигнал 521 электрического тока низкого уровня, формируемый фотодетектором 318, усиливается усилителем 602. Полученный сигнал суммируется с сигналом 692 в суммирующем усилителе 604 и затем преобразуется цифровую форму в АЦП 608. Сигнал 692 компенсации ухода DC-смещения имеет амплитуду, которая компенсирует уходы DC-смещения Bq. Усилители 604 и 654 включают фильтры нижних частот с частотой отсечки, выбранной для обеспечения ослабления высокочастотного шума и пропускания требуемой ширины полосы частот сигнала. Сигналы 680 и 682, дискретизированные с помощью АЦП 608 и 650, являются корректными представлениями сигналов электрического тока 520 и 521 соответственно, в которых исключены уходы DC-смещения. Результирующие сигналы 680 и 682 показаны графически на фиг.5c и обозначены q и p соответственно. Сигнал q представлен графически на горизонтальной оси, а сигнал p - на вертикальной оси. Сигналы p и q описывают эллипс 534, по мере того как дифракционная решетка 120a перемещается на расстояние, равное 1/4 шага дифракционной решетки. Эллипс описывается в направлении по часовой стрелке или против часовой стрелки, в зависимости от направления перемещения дифракционной решетки. Это позволяет использовать квадратурный реверсивный счетчик для отсчета числа полных циклов эллипса с учетом направления вращения.
Грубое декодированное значение положения получают, отслеживая число и знак полных вращений эллипса. Эта величина измеряется электронными средствами грубого декодирования, которые в предпочтительном варианте осуществления включают в себя квадратурный счетчик 674 и суммирующие усилители 654 и 604 (фиг. 6). Квадратурный счетчик 674 получает входной сигнал от суммирующих усилителей 654 и 604 в форме прямоугольных сигналов 522 и 523, которые синхронизированы по фазе с сигналами 520 и 521 соответственно. Эти прямоугольные сигналы схематично представлены на фиг. 5b. Квадратурный счетчик 674 использует фронты прямоугольных сигналов 522 и 523 для отсчитывания общего числа и знака полных вращений эллипса. Полученное счетчиком значение обеспечивает грубое определение положения дифракционной решетки относительно произвольного начального положения. Частота отсечки фильтров нижних частот в усилителях 654 и 604 установлена так, чтобы ослаблять высокочастотный шум и передавать полосу частот, требуемую для квадратурного счетчика 674. Частота отсечки определяется из требуемой максимальной скорости дифракционной решетки и шага дифракционной решетки. Что касается вышеописанной предпочтительной реализации электронных средств грубого декодирования положения, то следует отметить, что возможны различные другие варианты осуществления, включая основанные на программном обеспечении, которые должны рассматриваться как охватываемые настоящим изобретением.
Точное декодированное значение положения определяется измерением фазового угла между p и q сигналами. Для специального случая, в котором сигналы 600 и 682 имеют равную максимальную амплитуду и фазовый угол Φ между ними точно равен 90 градусов, кривая 534, описываемая p и q сигналами, представляет собой круг. В этом специальном случае точное декодированное значение положения x, в момент t вычисляется из выражения: (1)
(1)
где мгновенное значение угла θ(t) вычисляется с использованием выражения: (2)
(2)
Для более общего случая, когда кривая 534, описываемая p и q сигналами, представляет собой эллипс, угол θ(t) определяется с использованием более общего алгоритма декодирования, учитывающего надлежащим образом форму, ориентацию и любые остаточные DC-смещения для эллипса. В общем, p(t) и q(t) сигналы могут быть выражены следующим образом: (3)
(3)
Уравнение (3) может быть преобразовано в уравнение (4), представленное ниже.
 (4)
(4)
Параметры сp, сq, dp, bp, и bq в уравнении (4) определяются следующим образом: (5)
(5) (6)
(6)
При любом заданном положении дифракционной решетки параметры наилучшего приближения эллипса сp, сq, dp, bp, и bq определяются следующим образом. Множество точек данных (pi, qi) на эллипсе фиксируются добавлением псевдослучайного сигнала к положению дифракционной решетки, чтобы сформировать один или более эллипсов. Точки (pi, qi) измеренных данных затем итеративно подставляются в уравнение (4) и в уравнение (7), представленное ниже.
 (7)
(7)
Параметры эллипса для наилучшего приближения, наряду с мгновенными измеренными значениями p(t) и q(t), используются микропроцессором 670 для декодирования мгновенного точного положения дифракционной решетки согласно уравнениям (1), (2) и (4). Микропроцессор 678 определяет положение дифракционной решетки в момент времени t путем комбинирования грубого значения положения, полученного из квадратурного счетчика 674, и точного значения положения, определенного вышеописанным алгоритмом точного декодирования, так, чтобы соответствующим образом учитывать неоднозначность, которая имеет место вблизи точек переключения квадратурного счетчика. Комбинирование точного декодированного значения и значения положение, полученного квадратурным счетчиком, обеспечивает получение единого числа, определяющего положение, следующим образом. Счетчик получает приращение на 4 отсчета для каждого полного цикла P и Q сигналов. Это изменение происходит при каждом пересечении нуля P и Q сигналами. Точное декодированное значение положения разбивает один цикл P и Q сигналов на 2N частей. N обычно выбирается в пределах от 6 до 12, чтобы обеспечивать достаточный диапазон и разрешающую способность. Точное положение, таким образом, представляется N-разрядным числом. Старшие 2 бита точного значения положения и младшие 2 бита отсчета квадратурного счетчика являются одними и теми же, если отсутствует перекос временной диаграммы сигнала или амплитудное смещение между значением счетчика и декодированным точным положением. Однако перекос временной диаграммы или амплитудное смещение могут иметь место, если значение счетчика и декодированное точное положение получены отдельно из P и Q сигналов, как это требуется для обеспечения эффективной в стоимостном отношении реализации. Квадранты определены на фиг. 5c. В первом квадранте два самых младших бита счетчика и два старших бита точного декодированного значения имеют значение 00. Во втором квадранте эти биты имеют значение 01, в то время как в третьем и четвертом квадрантах они имеют значение 10 и 11 соответственно. На границах квадрантов счетчик и точный декодер могут вырабатывать различные значения для двух перекрывающихся битов. Эта неоднозначность разрешается комбинированием отсчета счетчика и точного значения положения согласно следующему правилу:
1) Вычесть 2 из значения счетчика;
2) Сдвинуть полученные в результате биты влево на N-2 позиций, где N определяется как указано выше;
3) Добавить точное декодированное значение положения к результату шага 2;
4) Установить самые младшие N битов результата шага 3 в 0;
5) Заменить самые младшие N битов на точное декодированное значение положения.
Результирующее положение дифракционной решетки используется контроллером 128 положения привода головок (фиг. 1) совместно со звуковой катушкой привода для позиционирования в радиальном направлении одной или более магнитных головок записи 112 над соответствующими поверхностями дисков.
Показанные на фиг. 6 электронные средства точного декодирования выполняют вычисления, описанные выше. В предпочтительном варианте осуществления электронные средства точного декодирования включают в себя суммирующие усилители 604 и 654, АЦП 608 и 658, детекторы смещения 610 и 660, делители 616 и 666, ОЗУ 622 и 672, сумматоры 618 и 668, ЦАП 620 и 670 и квадратурный счетчик 674. Сигнал 690, требуемый для компенсации уходов DC-смещения Bq, обеспечивается ЦАП 670.
Амплитуда требуемого сигнала в функции положения дифракционной решетки обеспечивается ОЗУ 672 с использованием предварительно определенных значений. Квадратурный счетчик 674 служит для адресации соответствующей ячейки памяти в ОЗУ 672, чтобы содержащееся в ней значение могло быть передано на ЦАП 670. Аналогично, сигнал 692, требуемый для компенсации ухода DC-смещения Вp, обеспечивается ЦАП 620 с использованием предварительно определенного значения, хранящегося в ОЗУ 622. ОЗУ 622 также адресуется квадратурным счетчиком 674.
Значения, хранящиеся в ОЗУ 672 и 622, соответствующие амплитудам сигналов 690 и 692 в функции положения дифракционной решетки, получены при перемещении дифракционной решетки 120a из одного начального крайнего положения в другое крайнее положение. Дифракционная решетка сначала устанавливается в начальное крайнее положение контроллером 128 следящей системы привода головок, работающим согласованно с звуковой катушкой 118 привода и приводом 114 головок. Начальное крайнее положение может определяться одним из упоров, обычно имеющихся в современных дисководах. Путем приложения соответствующего электрического возбуждения к звуковой катушке 118 осуществляется циклическое перемещение дифракционной решетки. Амплитуда сигнала положения такова, что один или более циклов синусоидального сигнала электрического тока генерируются фотодетекторами 314 и 318. При управлении от микропроцессора 670, АЦП 658 осуществляет дискретизацию результирующего сигнала 680. Частота дискретизации устанавливается несколько выше частоты результирующего сигнала 680, чтобы гарантировать, что максимальные и минимальные амплитуды будут точно фиксироваться детектором смещения 660. Детектор смещения усредняет максимальные и минимальные значения для определения значения B'q DC-смещения электрического тока. Часть результирующего значения DC-смещения B'q передается на сумматор 668 делителем 666. Значение сумматора сохраняется в ОЗУ 672 и передается на ЦАП 670. ЦАП генерирует сигнал 690, который, в свою очередь, уменьшает значение DC-смещения сигнала 680. Этот процесс повторяется при управлении от микропроцессора 678 до тех пор, пока DC-смещение сигнала 680 не уменьшится до значения, близкого к нулю. Результирующее значение сумматора сохраняется в ОЗУ 672.
Аналогично и одновременно с вышеупомянутой последовательностью, микропроцессор 678 управляет работой АЦП 608 при дискретизации результирующего сигнала 682. Максимальные и минимальные амплитуды сигнала 682 точно фиксируются детектором смещения 610. Детектор смещения усредняет максимальные и минимальные значения для определения значения B'p DC-смещения. Часть результирующего значения Bp DC-смещения передается на сумматор 618 делителем 616. Текущее значение сумматора сохраняется в ОЗУ 622 и передается на ЦАП 620. ЦАП генерирует сигнал 692, который, в свою очередь, уменьшает значение DC-смещения сигнала 682. Этот процесс повторяется при управлении от микропроцессора 678 до тех пор, пока DC-смещение сигнала 682 также не уменьшится до значения, близкого к нулю. Результирующее значение сумматора сохраняется в ОЗУ 622. Использование делителей 666 и 616 гарантирует асимптотическое приближение к корректным значениям сигналов смещения 690 и 692, соответственно, даже в присутствии ошибок усиления, которые могут иметь место в АЦП 658 и 608 и в ЦАП 670 и 620.
Квадратурный счетчик 674 полностью функционален, как только DC-смещения в выходных сигналах суммирующих усилителей 654 и 604 будут скомпенсированы с использованием вышеописанной процедуры. Квадратурный счетчик 674 может затем обеспечивать грубый сигнал положения для микропроцессора 670 и абсолютную адресацию памяти для ОЗУ 672 и ОЗУ 622. При управлении следящей системой с низким усилением и использовании только грубого сигнала положения с квадратурного счетчика 674 контроллер 128 следящей системы привода головок, работающий согласованно со звуковой катушкой 118 и приводом 114, постепенно перемещает дифракционную решетку из начального крайнего положения в другое крайнее положение. В процессе перемещения, микропроцессор 678, с помощью квадратурного счетчика 674, осуществляет управление АЦП 658 и детектором смещения 660 для измерения мгновенное значения смещения B'q сигнала 680. Сигнал B'q делится делителем 666 и добавляется к предыдущему значению сумматора, сохраненному в сумматоре 668. Результирующее значение сумматора используется ЦАП 670 для формирования сигнала 690, который добавляется в суммирующем усилителе 654 к выходному сигналу усилителя 652. Значение сумматора также сохраняется в ОЗУ 672 в адресе памяти, определенном значением квадратурного счетчика. Таким образом, значение сумматора, требуемое для компенсации DC-смещения в сигнале 520, сохраняется в ОЗУ 672 для каждого желательного положения дифракционной решетки.
Аналогично и одновременно с вышеописанным процессом, значение сумматора, требуемое для компенсации DC-смещения в сигнале 521, сохраняется в ОЗУ 622 для каждого желательного положения дифракционной решетки, что обеспечивается микропроцессором 678, квадратурным счетчиком 674, АЦП 608, детектором смещения 610, делителем 616, сумматором 618, ЦАП 620 и ОЗУ 622. Значения Bq и Bp уходов DC-смещения, как ожидается, изменяются постепенно в узком диапазоне в зависимости от изменения положения дифракционной решетки вследствие: а) ожидаемых малых амплитудных изменений и больших пространственно-частотных изменений эффективности дифракционной решетки; b) ожидаемого постепенного изменения эффективности детектирования оптического датчика положения при переносе дифракционной решетки; и с) того, что проектируемая зона падения лазерного луча на дифракционную решетку существенно превышает общую зону освещенных дефектов в любом данном положении дифракционной решетки. Постепенное изменение значений DC-смещения может использоваться для улучшения отношения сигнал/шум значений Bp и Bq, сохраняемых в ОЗУ 622 и ОЗУ 672 соответственно, приводя к тому, что значение N в делителях 666 и 616 на фиг.6 превышает 1. Это обеспечивает сохранение текущих усредненных значений в ОЗУ 622 и 672 и таким образом уменьшает чувствительность к шумам.
Что касается вышеописанной предпочтительной реализации электронных средств, то следует отметить, что возможны различные иные варианты осуществления, которые должны рассматриваться как охватываемые настоящим изобретением. Например, компенсация смещения может выполняться программным обеспечением, а не только аппаратными средствами, в то время как вся функция декодирования может выполняться аппаратными средствами.
III. Подсистема синхронизации записи
Подсистема синхронизации записи, показанная схематично на фиг.7a, включает в себя оптический датчик синхросигнала 134, состоящий из полупроводникового лазерного источника 700, дефлектора 706 лазерного луча и оптических средств детектирования 702 и 704, а также дифракционную решетку 130, оптическое окно 132 и электронные средства 136 обработки сигнала синхронизации записи. Плоская дифракционная решетка 130, показанная на фиг.7b, имеет форму кольца, имеющего ширину, достаточную для помещения на нем диаметра лазерного луча, и допуск на центрирование по отношению к центру вращения втулки шпинделя дисковода. Дифракционные линии решетки сходятся к центру кольца. Радиальная дифракционная решетка в радиальном положении, где лазерный луч падает на ее поверхность, имеет шаг, приблизительно равный удвоенной длине волны лазерного луча, и глубину, приблизительно равную 1/4 длины волны лазерного луча. Чтобы максимизировать эффективность оптического датчика синхросигнала записи, шаг дифракционной решетки и глубина предпочтительно выбираются так, чтобы оптимизировать и выравнять эффективность 1-ого порядка дифракционной картины для p-поляризованного и s-поляризованного лазерных лучей и минимизировать дифракционную эффективность для всех других порядков дифракции. Выгодно использовать малую дифракционную решетку и выбирать подложку с низкой плотностью или даже предпочтительно воспроизводить дифракционную решетку непосредственно на поверхности втулки шпинделя дисковода. Подсистема генерирует точный сигнал синхронизации записи и сигнал синхронизации индекса диска, который "синхронизирован по фазе" с дисковой поверхностью. Общее число циклов синхросигнала на оборот определяется числом линий радиальной дифракционной решетки. Электронные средства детектирования спроектированы так, что любые дополнительные импульсы или отсутствующие импульсы, обусловленные дефектами дифракционной решетки и/или шумом электронных средств, компенсируются. Точные положения по окружности записанных магнитных меток, сформированных системой сервозаписи, контролируются системой синхронизации записи, которая вырабатывает требуемый синхросигнал и индексный сигнал диска, используемые для того, чтобы точно синхронизировать комбинацию данных, хранящуюся в генераторе шаблонов 142.
А. Оптический датчик синхросигнала записи
На фиг. 8 показан вид в сечении, иллюстрирующий детальную конструкцию оптического датчика 134 синхросигнала записи, предназначенного для использования с радиальной дифракционной решеткой для генерирования синхросигнала записи, согласно настоящему изобретению.
Система измерения включает полупроводниковый лазера 700, линзу коллиматора 804, поляризаторы 822 и 824, поляризационный делитель луча 806, сферические линзы 808, 814, и 820, фотодетектор 826, четвертьволновые пластины 810 и 816, уголковые отражатели 812 и 818 и радиальную дифракционную решетку 130. В процессе функционирования лазерный луч, сформированный лазерным диодом 700, проходит через коллиматор 804, поляризатор 822 и поляризационный делитель луча 806. Поляризатор 822 и поляризационный делитель луча 806 блокируют любой S-поляризованный компонент и пропускают P-поляризованный компонент к линзе 820. Результирующий луч является существенно сфокусированным (в пределах приблизительно 5%) линзой 820 в пятно 830 на радиальной дифракционной решетке 130. В предпочтительном варианте осуществления луч, падающий на линзу 820, смещен от оптической оси линзы 820 приблизительно 1,5 мм, поэтому луч 0-го порядка, отраженный дифракционной решеткой, смещен приблизительно на 3 мм относительно падающего лазерного луча после того, как он пройдет назад через линзу 820. В результате, его можно легко блокировать, не допуская его возврата к лазерному диоду 802, тем самым решая известную проблему чувствительности лазерных диодов к свету, возвращенному обратно в их резонаторы. P-поляризованный луч 0-го порядка, отраженный от дифракционной решетки, пропускается поляризационным делителем луча 806 и не отражается к фотодетектору 826, чтобы не ухудшать его характеристики.
Дифрагированные лазерные лучи +1-го и -1-го порядков дифракции распространяются от дифракционной решетки в направлении соответствующих оптических средств восстановления волнового фронта. В частности, результирующий лазерный луч +1-го порядка дифракции проходит через сферическую линзу 808, которая коллимирует его, затем проходит через четвертьволновую пластину 810, отражается обратно уголковым отражателем 812 и снова проходит последовательно через четвертьволновую пластину 810 и линзу 808. Линза 808 в основном фокусирует результирующий луч на дифракционной решетке в виде пятна 830. Результирующий луч дифрагируется дифракционной решеткой 130 и направляется к линзе 820. Линза 820 повторно коллимирует луч и направляет его к поляризационному делителю луча 806. Аналогично, результирующий лазерный луч -1-го порядка дифракции проходит через сферическую линзу 814, которая коллимирует его, затем проходит через четвертьволновую пластину 816, отражается обратно уголковым отражателем 818 и снова проходит последовательно через четвертьволновую пластину 816 и линзу 814. Линза 814 в основном фокусирует результирующий луч на дифракционной решетке в виде пятна 830, обеспечивая его перекрытие с лучом +1-го порядка, также сфокусированным в пятно 830 другим набором оптических средств. Результирующий луч дифрагируется дифракционной решеткой 130 в направлении к линзе 820. Линза 820 повторно коллимирует луч и направляет это к поляризационному делителю луча 806.
Оптическая юстировка оптических компонентов такова, что результирующие дифрагированные лучи +1-го и -1-го порядков дифракции совпадают и являются коллинеарными. Четвертьволновые пластины 810 и 816 служат для преобразования результирующего луча в s-поляризованный. Объединенный лазерный луч формирует интерференционные полосы, интенсивность которых изменяется при повороте радиальной дифракционной решетки. Поляризационный делитель луча 806 направляет объединенные лучи к поляризатору 824 и затем к фотодетектору 826. Поляризатор 824 служит для увеличения возможностей ослабления поляризационным делителем луча 806 p-поляризованного светового луча при пропускании s-поляризованного светового луча к фотодетектору 826. Электрические сигналы, выработанные фотодетектором 826, представляют собой синусоидальную функцию времени и синхронизированы по отношению к дифракционным линиям на радиальной дифракционной решетке и, следовательно, к вращению шпинделя. Поворот дифракционной решетки на шаг в одну линию приводит к 4 полным циклам электрического сигнала. Результирующий сигнал затем обрабатывается для формирования высокоточного и воспроизводимого синхросигнала записи, который является синхронизированным с вращением шпинделя.
В. Электронные средства детектирования
Мгновенная частота необработанного синхросигнала записи далее называемого необработанным синхросигналом, вырабатываемая на выходе фотодетектора 826, определяется мгновенной скоростью вращения шпинделя и средним шагом радиальной дифракционной решетки, освещаемой лазерным лучом из головки записи опорного синхросигнала записи. Ошибка центрирования радиальной дифракционной решетки 130 относительно оси вращения шпинделя модулирует средний радиальный шаг дифракционной решетки, освещенной лазерным лучом, и, тем самым, мгновенную частоту необработанного синхросигнала. Результирующая модуляция является синусоидальной с частотой, равной частоте вращения шпинделя. Амплитуда определяется ошибкой центрирования дифракционной решетки, а фаза определяется направлением ошибки центрирования дифракционной решетки относительно положения оптической головки записи опорного синхросигнала. И величина и фаза частотной модуляции повторяются для каждого оборота шпинделя. Например, в дифракционной решетке радиуса 10 мм ошибка центрирования в 1%, вследствие разъюстировки на 100 мкм дифракционной решетки, приводит к тому, что амплитуда необработанного синхросигнала имеет 1% частотную модуляцию. Необработанная частота синхросигнала также модулируется любыми регулярными и нерегулярными биениями шпинделя, а также любой неоднородностью по окружности в шаге линий дифракционной решетки.
Кроме электронного шума, вышеупомянутые эффекты объединяются и вносят дополнительную регулярную и нерегулярную ошибку в необработанный синхросигнал. За счет надлежащих процедур проектирования и изготовления шпинделя и дифракционной решетки их вклад в ошибку может быть соответственно уменьшен. Однако, в большинстве практических применениях было бы экономически непрактичным соответственно уменьшать долю ошибки, обусловленной неточным центрированием дифракционной решетки. Таким образом, настоящее изобретение обеспечивает два подхода, которые значительно уменьшают регулярную модуляцию необработанного синхросигнала, обусловленную ошибкой центрирования дифракционной решетки. Первый подход основывается на использовании электронных средств, которые точно измеряют повторяющуюся амплитуду и фазу модуляции необработанного синхросигнала и электронным путем компенсируют их; второй подход основан на использовании двух оптических головок записи синхросигнала, установленных на противоположных сторонах дифракционной решетки, но номинально на одном и том же радиусе дифракционной решетки для генерирования двух необработанных синхросигналов. Эти два синхросигнала смешиваются электронным путем для выработки скомпенсированного опорного синхросигнала записи, далее называемого скомпенсированным синхросигналом.
Электронные средства детектирования и компенсации необработанного синхросигнала для реализации первого подхода показаны в форме блок-схемы на фиг. 9. Электронные средства детектирования необработанного синхросигнала включают в себя фотодетектор 826, полосовой усилитель с автоматической регулировкой усиления (АРУ) 900, генератор 901 прямоугольного колебания, фазовый детектор 902, фильтр 904, управляемый напряжением генератор (УНГ) 906 и цифровой делитель 907. Амплитуда и фаза частотной модуляции, обусловленной ошибкой центрирования дифракционной решетки, измеряется с использованием этих электронных средств вместе со средствами измерения. Электронные средства измерений включают в себя аналого-цифровой преобразователь (АЦП) 930, детектор краев 926, цифровой счетчик 928, генератор адресов 929 ОЗУ и блок обработки 932. Компенсация необработанного синхросигнала выполняется электронными средствами детектирования необработанного синхросигнала вместе с квадратурным генератором корректировок синхронизации с использованием информации, хранящейся в ОЗУ 934. Квадратурный генератор корректировок синхронизации включает в себя детектор края 926, цифровой счетчик 928, генератор адреса 929 ОЗУ, ОЗУ 934, блок обработки 932, квадратурный генератор пилообразного сигнала 900, пиковые детекторы 910 и 920, умножающие ЦАП 912 и 922, компараторы 914 и 924 и селектор импульсов 916. Генератор скомпенсированного синхросигнала записи включает в себя фазовый детектор 940, фильтр 942, УНГ 944 и цифровой делитель 946.
В процессе функционирования необработанный синхросигнал с фотодетектора 826 поступает на усилитель 900. Усилитель 900 осуществляет полосовую фильтрацию и автоматическую регулировку усиления сигнала перед его подачей на генератор 901 прямоугольного колебания. Ширина полосы частот полосового фильтра может быть относительно узка, так как требуемая информация опорного синхросигнала записи содержится в компоненте на основной частоте. Желательная ширина полосы частот полосового фильтра прежде всего определяется ожидаемой ошибкой центрирования дифракционной решетки и изменениями скорости вращения (об/мин) шпинделя. Автоматическая регулировка усиления компенсирует любые изменения по окружности эффективности дифракционной решетки, которые в противном случае отрицательно воздействовали бы на характеристики генератора прямоугольного колебания 901 и затем на фазовый детектор 902. Генератор прямоугольного колебания 901, фазовый детектор 902, фильтр 904 и УНГ 906 совместно функционируют как классическая цепь фазовой синхронизации для генерирования необработанного синхросигнала, синхронизированного с дифракционными линиями на дифракционной решетке 130. Цепь фазовой синхронизации также обеспечивает снижение влияния электронного шума и компенсацию любых пропусков или дополнительных пересечений нуля, возникающих в выходном сигнале усилителя 900. Дефекты дифракционной решетки, например, могут привести к пропускам или дополнительным пересечениям нуля, которые обусловят то, что индексный счетчик будет несинхронизирован с шпинделем диска.
Необработанный синхросигнал из УНГ 906 точно синхронизируется с линиями дифракционной решетки и с вращением шпинделя. Дрожание временной диаграммы необработанного синхросигнала очень мало, благодаря высокому отношению сигнал/шум электрического сигнала с фотодетектора 826 и благодаря ослаблению влияния шумов и дефектов дифракционной решетки, обеспечиваемому электронными средствами детектирования необработанного синхросигнала. Если необходимо, частота необработанного синхросигнала может быть разделена и/или умножена внутренними или внешними электронными средствами детектирования необработанного синхросигнала с использованием известных методов.
Величина и фаза частотной модуляции необработанного синхросигнала измеряются следующим образом. Края переходов необработанного синхросигнала детектируются детектором края 926 и рассчитываются цифровым счетчиком 928. В частности, цифровой счетчик 928 вырабатывает стационарный индекс шпинделя, отсчитывая общее число переходов за полный оборот шпинделя. Общее число переходов на полный оборот шпинделя определяется числом линий дифракционной решетки и любым делением или умножением, выполняемым в электронных средствах детектирования необработанного синхросигнала. Измеренные данные краев переходов также передаются на АЦП 930 и на генератор 929 адреса ОЗУ. АЦП 930 использует края переходов для определения временной диаграммы обнаружения данных, в то время как генератор адресов 929 ОЗУ использует их для определения соответствующих адресов данных для ОЗУ 934. Для конкретного оборота шпинделя мгновенный входной сигнал УНГ 906 и, тем самым, мгновенная выходная частота цифрового делителя 907 синхронно дискретизируется с помощью АЦП 930 и передается на блок обработки 932 для запоминания и обработки.
Блок обработки 932 использует данные, полученные для множества полных оборотов шпинделя, для вычисления наилучшей оценки амплитуды и фазы частотной модуляции, обусловленной ошибкой эксцентричности дифракционной решетки. Вычисления выполняются с использованием статистических принципов, хорошо известных в уровне техники и не требующих детального описания. Число полных оборотов шпинделя, а также число выборок данных для конкретного оборота шпинделя выбираются так, чтобы компенсировать любые изменения шпинделя и усреднять шумы. Блок обработки 932 использует наилучшую оценку амплитуды и фазы для вычисления синхронных корректировок временной диаграммы, требуемых для каждого цикла необработанного синхросигнала, чтобы компенсировать ошибку центрирования дифракционной решетки. Соответствующее представление синхронных корректировок временной диаграммы сохраняется в ОЗУ 934, которое адресуется с использованием генератора адреса 929 ОЗУ. Значение, сохраненное в ОЗУ 934, используется затем для осуществления мгновенных корректировок временной диаграммы с использованием квадратурного генератора корректировок временной диаграммы.
Функции квадратурного генератора корректировки временной диаграммы выполняются квадратурным генератором пилообразного сигнала 908, пиковыми детекторами 910 и 920, умножающими ЦАП 912 и 922 и компараторами 914 и 924. Квадратурный пилообразный генератор 908 генерирует квадратурные пилообразные сигналы, синхронные с необработанным синхросигналом с цифрового делителя 907. Необработанный синхросигнал 1000, квадратурные пилообразные сигналы 1010 и 1040, а также выходные сигналы компараторов 914 и 924, 1001 и 1002, соответственно, показаны в форме временной диаграммы на фиг. 10. Выходной сигнал ЦАП 912 для последовательных циклов сигнала 1010 показан схематично горизонтальными линиями 1020, 1021 и 1022. Компаратор 914 вырабатывает сигнал 1001, содержащий последовательные импульсы 1030, 1031 и 1032, когда амплитуда пилообразного равна заранее установленным выходным сигналам 1020, 1021 и 1022 соответственно ЦАП 912. Аналогично, выходной сигнал ЦАП 922 для последовательных циклов сигнала 1040 показан схематично горизонтальными линиями 1050, 1051 и 1052. Компаратор 924 вырабатывает сигнал 1002, содержащий последовательные импульсы 1060, 1061 и 1062, когда амплитуда пилообразного сигнала равна предварительно установленным выходным сигналам 1050, 1051 и 1052 умножающего ЦАП 922. В примере, показанном схематично на фиг. 10, необработанный синхросигнал имеет период из 16 блоков, в то время как выходной сигнал компаратора имеет период из 18 блоков. Аналогично, при соответствующем выборе выходных последовательных значений ЦАП 912 и 922 выходные значения компараторов 914 и 924 могут иметь период меньший, чем необработанный синхросигнал. Таким образом, путем программирования соответствующей последовательности значений в ОЗУ 934 период импульсов сигналов 1001 и 1002 может поддерживаться постоянным при изменении периода необработанного синхросигнала при вращении шпинделя.
Выходное значение ЦАП 912 для каждого цикла необработанного синхросигнала определяется цифровым значением, хранящимся в ОЗУ 934, и нормируется пиковым значением предыдущего цикла пилообразного сигнала с выхода пикового детектора 910. Аналогично, выходное значение ЦАП 922 для каждого цикла необработанного синхросигнала определяется цифровым значением, хранящимся в ОЗУ 934, и нормируется пиковым значением предыдущего цикла пилообразного сигнала с использованием выходного сигнала пикового детектора 920. Нормировка, обеспечиваемая ЦАП 912 и 922, пиковыми детекторами 910 и 920, гарантирует то, что изменения амплитуды пилообразного сигнала, вызванные изменениями частоты необработанного синхросигнала, компенсируются от цикла к циклу. Путем синхронного изменения значения выходного значения ОЗУ 934 при управлении от генератора адресов 929 ОЗУ выходные импульсы компараторов 914 и 924 могут позиционироваться где угодно между началом и концом данного цикла пилообразного сигнала. Таким образом, положение импульса относительно сигналов 1001 и 1002 может непрерывно и предсказуемо перемещаться внутри цикла пилообразного сигнала и от цикла к циклу для компенсации изменений частоты вследствие ошибки центрирования дифракционной решетки.
В принципе, любой из сигналов 1001 или 1002 может обеспечить скомпенсированный синхросигнал, если пилообразный сигнал генератора 908 достаточно близок к идеальному, то есть если пилообразный сигнал генератора 908 имеет время перехода от максимума к нулю много меньше, чем желательный минимальный интервал задержки, и высоко линеен во всем диапазоне. Однако, это требование привело бы к излишнему увеличению требований к эффективности и к повышению стоимости компонентов, используемых для осуществления генератора пилообразного сигнала, а также к усложнению его конструкции. В соответствии с изобретением, требование выбора определенного времени перехода, а также требование линейности во всем диапазоне значительно ослабляются при использовании квадратурного генератора и соответствующем выборе сигнала 1001 или 1002 с помощью селектора импульсов 916. Единственное принципиальное требование, сохраняющееся для квадратурного генератора, состоит в том, что центральные части сигналов должны быть линейными, а их крутизна наклонов - хорошо согласованной. Эти требования могут быть удовлетворены эффективным и экономичным способом при использовании методов, хорошо известных в данной области техники. Скомпенсированный синхросигнал вырабатывается селектором импульсов 916 и цепью фазовой синхронизации, включающей в себя фазовый детектор, фильтр 942, УНГ 944 и цифровой делитель 946.
В типовых применениях цепи фазовой синхронизации линейность УНГ 906 может не быть принципиально важным фактором. Однако в контексте настоящего изобретения линейность УНГ 906 весьма важна, так как на этом основано точное измерение величины и фазы частотной модуляции необработанного синхросигнала. Характеристики преобразования напряжения в частоту, осуществляемого УНГ, измеряются путем подачи на генератор 901 прямоугольного колебания поочередно двух или более сигналов, имеющих точно известные частоты, которые охватывают желательный рабочий диапазон. Входные частоты могут вырабатываться, например, тактовым генератором с кварцевой стабилизацией. На входе УНГ 906 берется множество выборок для каждой входной частоты с использованием АЦП 930. Полученные значения выборок подгоняются к прямой линии для вычисления характеристик преобразования напряжения в частоту в соответствии с методами проектирования, известными в данной области техники.
Второй метод осуществления детектирования и компенсации необработанного синхросигнала, иллюстрируемый с помощью фиг. 11, использует две раздельные тактирующие головки, позиционированные с разнесением на 180 градусов (на противоположных сторонах от центра дифракционной решетки). Подсистема синхросигнала записи, согласно этому методу, включает в себя оптические головки синхронизации 1150 и 1100, дифракционную решетку 130, электронные средства детектирования необработанного синхросигнала 1130 и 1140, смеситель синхросигнала записи 1160 и детектор скомпенсированного синхросигнала записи 1170. Оптическая головка синхронизации 1100 включает в себя полупроводниковый лазер 1103, поляризационный делитель луча 1102 и фотодетектор 1104. Аналогично, оптическая головка синхронизации 1150 включает в себя полупроводниковый лазер 1152, поляризационный делитель луча 1153 и фотодетектор 1154. Схема конструкции оптических головок синхронизации в целом показана на фиг. 8, описанной выше. Каждая головка связана с соответствующими электронными средствами детектирования синхросигнала. Построение схемы электронных средств детектирования синхросигнала 1130 и 1140 эквивалентно схеме, показанной на фиг. 9, и включает в себя усилитель 900, генератор 901 прямоугольного колебания, фазовый детектор 902, фильтр 904 и УНГ 906. Два синхронизированных необработанных синхросигнала дифракционной решетки, выработанных электронными средствами детектирования синхросигнала 1130 и 1140, объединяются в смесителе 1160, формируя выходной сигнал:
cos(f1)•cos(f2)= 0,5[cos(f1+f2)+ cos(f1-f2)].
Детектор скомпенсированного синхросигнала записи 1170 удаляет составляющую разностной частоты с использованием фильтра верхних частот и обрабатывает оставшуюся составляющую суммарной частоты для формирования составного синхросигнала записи. Благодаря компенсации, осуществленной в отношении вышеупомянутых комбинаций, результирующий составной синхросигнал не имеет ошибки по частоте первого порядка, обусловленной ошибкой центрирования дифракционной решетки. Величина оставшейся составляющей второго порядка намного ниже составляющей первого порядка, ввиду пропорциональности квадрату ошибки центрирования. Для наихудшего случая 1% ошибки центрирования дифракционной решетки, этот метод дает в результате максимальную ошибку 0,01% в результирующей частоте скомпенсированного опорного синхросигнала записи, которая является адекватной для большинства систем сервозаписи.
В некоторых системах может не требоваться полная коррекция частоты опорного синхросигнала. Во многих случаях лишь небольшой объем информации требуется для синхронной записи. Например, при записи шаблонов секторов для сервосистемы на диске для записи данных, любой одиночный отслеживаемый сервосистемой сектор записывается с синхронным тактовым сигналом для обеспечения юстировки от дорожки к дорожке, но требование синхронизации между секторами, отслеживаемыми сервосистемой, может быть ослаблено. В этом случае может быть достаточно гарантировать, чтобы время между секторами сервосистемы было скорректировано, без реальной корректировки частоты опорного тактового сигнала. Опорный тактовый сигнал с кварцевой стабилизацией может быть использован для калибровки длины сектора, измеряемой с использованием скомпенсированного синхросигнал записи, обеспечивая, таким образом, формирование секторов одинаковой длины. Точность калибровки должна быть только соразмерной с точностью управления скоростью вращения шпинделя, которая при необходимости сама может быть улучшена путем усреднения данных, полученных для множества оборотов шпинделя.
IV. Оптические средства восстановления волнового фронта
Отражательные дифракционные решетки, входящие в состав датчика положения привода и опорного генератора синхросигнала записи, описанных выше, обеспечивают формирование линейно и радиально расположенных дифракционных картин соответственно. По мере поворота дифракционной решетки относительно падающего светового луча фаза отраженных дифракционных картин получает сдвиг относительно фазы падающих лучей. Этот сдвиг фазы, измеряемый соответствующими фотодетекторами, обеспечивает основу для точного определения положения привода головок и опорного синхросигнала записи.
Проблема, связанная с использованием дифракционной картины, полученной с использованием линейной дифракционной решетки с поворотным приводом головок, широко распространенным в современных дисководах, состоит в том, что дифрагированный лазерный луч вращается относительно падающего лазерного луча при вращении привода головок относительно оси вращения. При проектировании оптической системы необходимо учитывать поворот привода головок, который может быть в пределах до +/- 20 градусов. С другой стороны, дифрагированный лазерный луч не вращается, если используется радиальная дифракционная решетка вместо линейной дифракционной решетки. Однако проблема, связанная с радиальной дифракционной решеткой, состоит в заметной аберрации волнового фронта дифракционной картины, обусловленная переменным шагом линий дифракционной решетки под действием падающего лазерного луча. В типовой оптической системе, дифракционные картины "+" и "-" порядков отражаются обратно к пятну на дифракционной решетке, рядом с падающим лазерным лучом источника, и затем дифрагируют по нормали к поверхности дифракционной решетки по направлению к фотодетекторам для детектирования фазы. Объединенные дифракционные картины "+" и "-" порядков результирующего лазерного луча проявляют существенные аберрации волнового фронта. Это приводит к недостаточному контрасту дифракционной картины, что ухудшает эффективность системы определения положения. Это также приводит к тому, что система детектирования весьма чувствительна к разъюстировке оптических средств относительно дифракционной решетки, так как два результирующих лазерных луча с заметной аберрацией должны поддерживаться точно коллинеарными при повороте дифракционной решетки.
В предшествующем уровне техники не известны конструкции, совместимые с высокими значениями углов поворота в горизонтальной плоскости, которые являются следствием вращения линейной дифракционной решетки. В известном уровне техники, относящемся к определению углового положения с помощью радиальной дифракционной решетки, либо не корректировались аберрации результирующего волнового фронта в дифракционных картинах, либо свет фокусировался на щели с использованием цилиндрической линзы, присоединенной к поверхности дифракционной решетки для минимизации аберраций, либо лазерный луч, подверженный аберрациям, повторно коллимировался с использованием сложной оптической системы. Второй подход имеет серьезные недостатки, связанные со значительным увеличением веса и стоимости дифракционной решетки, а также с наличием весьма малого полезного диапазона, что делает его неэффективным для использования в дисководе, как описано в предыдущих разделах. Последний подход использует цилиндрическую линзу для удаления астигматизма в волновом фронте, подверженном аберрациям. Более конкретно, для дифрагированного лазерного луча "+" порядка при таком подходе используется клиновидная призма для отклонения лазерного луча, пара цилиндрических линз для коррекции аберрации, оптический кубик для отражения результирующего лазерного луча, вторая клиновидная призма для повторного отклонения лазерного луча, вторая пара цилиндрических линз для преобразования светового пучка в сопряженный волновой фронт перед возвращением результирующего лазерного луча к дифракционной решетке. Юстировка двух клиновидных призм, двух наборов цилиндрических линз и оптического кубика-отражателя, требуемая для возврата коллимированного дифрагированного луча "+" порядка к дифракционной решетке в необходимом положении и с соответствующим углом, в лучшем случае весьма затруднительна. Юстировка второго набора идентичных оптических элементов для дифрагированного луча "-" порядка таким образом, чтобы результирующий лазерный луч, возвращенный к дифракционной решетке, был коллимированным, а также коллинеарным и совпадающим с дифрагированным лучом "+" порядка, была бы чрезвычайно трудной. В любом случае, даже если юстировку можно было выполнить, было бы очень трудно сохранять все оптические компоненты надлежащим образом отъюстированными в процессе обычного обращения и использования. Этот подход, таким образом, весьма непривлекателен для практических применений, вследствие большого количества оптических компонентов, сложности механических средств, требуемых для юстировки оптических компонентов, и трудностей в осуществлении и сохранении соответствующей юстировки.
Еще один известный метод, обеспечивающий уменьшение оптических аберраций волнового фронта, вызванных радиальной дифракционной решеткой, предусматривает использование лазерного луча очень малого диаметра, падающего на радиальную дифракционную решетку. Однако, для большинства практических применений уменьшение диаметра лазерного луча нежелательно, потому что система детектирования становится очень чувствительной к дефектам дифракционной решетки, которые неизбежно присутствуют в дешевых дифракционных решетках массового производства.
В данном разделе рассматриваются оптические средства восстановления волнового фронта, соответствующие настоящему изобретению, которые направлены на решение вышеупомянутых оптических проблем и обеспечивают возможность оптической системе измерения точно измерять относительное положение как для линейной, так и для радиальной дифракционных решеток. Оптические средства восстановления компенсируют переменный угол поворота в горизонтальной плоскости, обусловленный линейной дифракционной решеткой, а также аберрации оптического волнового фронта, вызванные радиальной дифракционной решеткой. Конструкция оптических средств восстановления для линейной дифракционной решетки имеет ограниченный угловой диапазон, определенный практически используемыми оптическими компонентами, в то время как конструкция оптических средств восстановления для радиальной дифракционной решетки имеет полный 360-градусный угловой диапазон.
Оптические средства восстановления волнового фронта для линейной дифракционной решетки включают в себя первую сферическую линзу и первое плоское отражающее зеркало, размещенное на одной стороне относительно падающего лазерного луча, и вторую сферическую линзу и второе плоское отражающее зеркало, размещенное на противоположной стороне относительно падающего лазерного луча. Плоское отражающее зеркало может иметь переднюю отражающую поверхность или заднюю отражающую поверхность. Первая сферическая линза и плоское отражающее зеркало принимают дифрагированный лазерный луч "+" порядка от линейной дифракционной решетки, в то время как вторая сферическая линза и плоское отражающее зеркало принимают дифрагированный лазерный луч "-" порядка. В свою очередь, они направляют соответствующие лазерные лучи обратно к дифракционной решетке так, что они являются коллимированными и совпадающими. Оптические средства восстановления волнового фронта отъюстирваны так, что после второй дифракции на дифракционной решетке результирующие лазерные лучи коллинеарны и параллельны, но, возможно, смещены относительно падающего лазерного луча источника. Пространственное разнесение результирующего лазерного луча относительно падающего лазерного луча источника помогает осуществлению процесса детектирования, как описано в предыдущих разделах. Схема такова, что результирующие лазерные лучи остаются коллинеарными в пределах большого значения угла поворота дифракционной решетки. Допустимый угол поворота определяется прежде всего оптической апертурой линз и размерами зеркал. Эта схема весьма привлекательна для практических применений вследствие малого числа оптических компонентов, низкой сложности механических средств юстировки оптических компонентов и простоты осуществления и сохранения соответствующей юстировки.
Оптические средства восстановления волнового фронта для радиальной дифракционной решетки подобны описанным выше для линейной дифракционной решетки, за исключением того, что плоские зеркала заменены прямоугольными призмами или прямоугольными зеркалами (две плоские отражающие поверхности ориентированы ортогонально одна другой). Оптические средства восстановления волнового фронта включают в себя первую сферическую линзу и первый уголковый (прямоугольный) отражатель, размещенный по одну сторону относительно падающего лазерного луча, и вторую сферическую линзу и второй уголковый отражатель, размещенный на противоположной стороне относительно падающего лазерного луча. Первая сферическая линза и первый уголковый отражатель принимают дифрагированный лазерный луч "+" порядка от радиальной дифракционной решетки, в то время как вторая сферическая линза и второй уголковый отражатель принимают дифрагированный лазерный луч "-" порядка. В свою очередь, они направляют соответствующие лазерные лучи обратно к дифракционной решетке так, что они являются коллимированными и совпадающими. Оптические средства отъюстированы так, что после второй дифракции на дифракционной решетке результирующие лазерные лучи коллинеарны и параллельны, но, возможно, смещены относительно падающего лазерного луча источника. Пространственное разнесение результирующего лазерного луча относительно падающего лазерного луча вновь помогает осуществлению процесса детектирования. Схема такова, что результирующие лазерные лучи остаются коллинеарными по мере поворота дифракционной решетки при условии, что дифракционная решетка поворачивается вокруг оси, размещенной в точке, где сходятся линии радиальной дифракционной решетки. Эта схема обеспечивает полную коррекцию аберраций волнового фронта, вводимых радиальной дифракционной решеткой, и весьма привлекательна для практических применений, вследствие малого числа оптических компонентов, низкой сложности механических средств юстировки оптических компонентов, допусков на разъюстировку дифракционной решетки и простоты осуществления и сохранения соответствующей юстировки.
На фиг. 12 показано схематичное представление оптической системы измерения, разработанной для использования с линейной дифракционной решеткой в качестве метрики, называемой далее "линейная головка", характеризующей собой оптические средства восстановления волнового фронта типа - 1X телескопа. Оптическая головка 1202 включает в себя лазерный источник света 1204 и детектор 1206. Отражательная дифракционная решетка 208 имеет линейную дифракционную картину на ее верхней поверхности 1210 и присоединяется нижней поверхностью 1212 к приводу головок или пакету на шпинделе, как описано выше. Оптические средства восстановления волнового фронта включают в себя сферическую линзу 1214 и плоское отражающее зеркало 1216, расположенные на оптической оси 1226, и сферическую линзу 1220 и плоское отражающее зеркало 1222, расположенные на оптической оси 1228.
Геометрия оптических средств восстановления волнового фронта устанавливается для создания эффекта телескопа кратностью - 1. В частности, центры сферической линзы 1214 и плоского зеркального отражателя 1216 размещены на номинальной средней линии пути дифрагированного луча, обозначенной как оптическая ось 1226. Сферическая линза 1214 установлена на расстоянии f средней точки между пятнами 1230 и 1232 на дифракционной решетке 1208, измеряемом вдоль оптической оси 1226. Расстояние f установлено равным фокальной длине сферической линзы 1214. Дополнительно, плоский зеркальный отражатель 1216 установлен на расстоянии f от сферической линзы 1214, измеряемом вдоль оптической оси 1226. Подобно сферической линзе 1214 и плоскому зеркальному отражателю 1216, сферическая линза 1220 и плоский зеркальный отражатель 1222 размещены с приращениями расстояния, равными одной фокальной длине сферической линзы 1220, от дифракционной решетки 1208, с их центрами на номинальной средней линии пути дифрагированного луча, обозначенной как оптическая ось 1228.
В процессе функционирования, лазерный луч от лазерного источника 1204 падает на линейную дифракционную решетку 1208 по нормали в пятно 1230. Результирующие дифрагированные лазерные лучи "+" и "-" порядков дифракции распространяются в направлении соответствующих оптических средств восстановления волнового фронта. В частности, результирующий дифрагированный лазерный луч "+" порядка проходит через сферическую линзу 1220, фокусируется на плоском зеркале 1222 и отражается обратно через линзу 1220, которая повторно коллимирует луч и направляет его на дифракционную решетку 1208 в пятно 1232. Дифракционная решетка, в свою очередь, дифрагирует результирующие лучи в направлении детектора 1206. Вышеописанная конструкция и размещение плоского зеркала 1222 и линзы 1220 гарантируют, что результирующий луч параллелен, но смещен по положению относительно лазерного луча источника. Одновременно, дифрагированный лазерный луч "-" порядка дифракции проходит через сферическую линзу 1214, фокусируется на плоском зеркале 1216 и отражается обратно через линзу 1214, которая повторно коллимирует луч и направляет его на дифракционную решетку 1208 в пятно 1232. Дифракционная решетка, в свою очередь, дифрагирует результирующие лучи в направлении детектора 1206. Вышеописанная конструкция и размещение плоского зеркала 1216 и линзы 1214 гарантируют, что результирующий луч совпадает и коллинеарен с дифрагированным лучом "+" порядка и также направляется к детектору 1206. Два результирующих волновых фронта "+" и "-" порядка объединяются в полностью восстановленный коллимированный световой пучок, который распространяется в направлении детектора 1206.
Вышеописанная конструкция делает оптические средства восстановления нечувствительными к вращению дифракционной решетки в горизонтальной плоскости относительно оптической головки. Это, в свою очередь, устраняет потребность точной юстировки при установке линейной дифракционной решетки на приводе головок и при позиционировании оптической головки относительно дисковода для использования при измерении положения привода головок. Для дисководов, использующих поворотные приводы головок, такая конструкция обеспечивает средство точного измерения положения поворотного привода головок, использующего линейную дифракционную решетку. На практике, оптические средства восстановления, показанные на фиг. 12, могут быть использованы с линейными дифракционными решетками, имеющими определенный диапазон значений шага дифракционных линий, и может обеспечивать нечувствительность к углу вращения в горизонтальной плоскости приблизительно до +/- 20 градусов. Допустимый угол поворота в горизонтальной плоскости ограничивается числовой апертурой, характеристикой "плоского поля" и телецентричностью линз 1214 и 1220, а также размером зеркал 1216 и 1222. Характеристики схемы чувствительны к изменениям в поляризационных состояниях, вызванными оптическими компонентами, так как оптический метод детектирования базируется на традиционном "одиночастотном интерферометре" или "интерферометре с круговой поляризацией". Таким образом, предпочтительно выбирать оптические компоненты, которые сохраняют состояния поляризации лазерного луча.
На фиг. 13 показана схема, иллюстрирующая оптическую систему измерения, включающую в себя оптические средства восстановления волнового фронта для использования с радиальной дифракционной решеткой, называемую здесь "радиальной головкой". Этот вариант осуществления использует радиальную дифракционную решетку в качестве средства измерения. Схема подобна показанной на фиг. 12, за исключением того, что плоские зеркальные отражатели 1216 и 1222 заменены на уголковые отражатели 1316 и 1322. Уголковые отражатели 1316 и 1322 включают в себя взаимно ортогональные грани, обозначенные 1318 и 1324 соответственно.
В процессе функционирования, лазерный луч, исходящий от лазерного источника 1304, падает на радиальную дифракционную решетку 1308 по нормали, в пятно 1330. Результирующие дифрагированные лазерные лучи "+" и "-" порядков распространяются в направлении соответствующих оптических средств восстановления волнового фронта. В частности, результирующий дифрагированный лазерный луч "+" порядка проходит через сферическую линзу 1320, которая изменяет подверженный аберрациям результирующий волновой фронт от пятна 1330 на дифракционной решетке в преобразованный по Фурье волновой фронт, направленный к уголковому отражателю 1322. Уголковый отражатель 1322 изменяет направление распространения луча на обратное и переворачивает изображение относительно кромки взаимно ортогональных граней. Затем луч снова проходит через сферическую линзу 1320, которая еще раз осуществляет Фурье- преобразование волнового фронта и формирует пятно 1332 на радиальной дифракционной решетке 1308. Двойное преобразование Фурье луча, распространяющегося от пятна 1330, с последующим отражением сигнала и поворотом относительно оси уголкового отражателя 1322, вырабатывает пятно 1332 луча, волновой фронт которого идентичен волновому фронту луча у пятна 1330, за исключением того, что направления распространия противоположны. Поскольку дифрагированный луч, распространяющийся от пятна 1330 на дифракционной решетке, имеет волновой фронт, который является антисимметричным относительно радиального направления дифракционной решетки, возвращенный луч, формирующий пятно 1332, имеет волновой фронт, который является комплексно сопряженным волновому фронту в пятне 1330.
Одновременно, дифрагированный лазерный луч "-" порядка проходит через сферическую линзу 1314 и уголковый отражатель 1316, которые аналогично трансформируют подверженный аберрациям волновой фронт и изменяют направление результирующего лазерного луча с формированием пятна 1332. Два результирующих волновых фронта "+" и "-" порядков дифракции повторно дифрагируют и объединяются с образованием полностью восстановленного коллимированного светового пучка, распространяющегося в направлении детектора 1306 оптической головки 1302. Так как аберрации антисимметричны относительно радиальной линии, проходящей через центр дифракционной решетки, и дифракционные линии пересекают два пятна, сформированных лучами, действие оптических средств восстановления волнового фронта должно обеспечивать фазосопряженную оптическую систему для волновых фронтов, антисимметричных относительно поперечной оси. Поскольку луч, возвращенный к дифракционной решетке в пятне 1332, имеет волновой фронт, сопряженный относительно волнового фронта луча, распространяющегося от пятна 1330 на дифракционной решетке, луч, возвращающийся к детектору 1306, становится вновь коллимированным после того, как второй раз дифрагируется на дифракционной решетке.
Как в случае с линейной головкой, принципиально важным является воздействие оптических компонентов на поляризационные состояния лучей, поскольку оптическая схема детектирования для радиальной головки та же самая, что и для линейной головки. Это дополнительно усложняется тем обстоятельством, то типовые отражающие покрытия, используемые для уголковых отражателей, не сохраняют поляризационные состояния. Однако эту проблему относительно просто решить за счет применения общеизвестного покрытия с поворотом фазы на 270 градусов для внутренних отражений в прямоугольной призме. Например, покрытие с вращением поляризации на 270 градусов для лазерной длины волны 780 нм может быть получено с применением следующей последовательности тонкопленочных покрытий на поверхностях ортогональных граней призмы из стекла ВК-7: 23,45 нм TiO2, 245,60 нм MgF2, 16,60 нм TiO2, 121,11 нм MgF2. Путем размещения этого покрытия на двух взаимно ортогональных гранях призмы и использования гипотенузной грани призмы в качестве входной грани уголкового отражателя, поляризационные состояния падающего светового луча получают сдвиг фазы на 270 градусов каждый раз, когда световой луч падает на грань с покрытием. После прохождения светового пучка через такой уголковый отражатель, поляризационное состояние получает сдвиг фазы на 540 градусов, что эквивалентно изменению на 180 градусов поляризационного состояния, вследствие периодического характера поляризационных состояний. Результирующий поворот на 180 градусов поляризационного состояния не нарушает процесс детектирования сигнала в настоящем изобретении, так как он просто изменяет направление вращения круговой поляризации световых пучков (левое на правое или правое на левое).
Оптические средства восстановления волнового фронта, соответствующие настоящему изобретению, могут легко адаптироваться для изменения размера и разнесения двух пятен луча на отражательной дифракционной решетке. Например, если требуются более близко расположенные лучи меньшего диаметра на поверхности дифракционной решетки, чем вырабатываемые и детектируемые блоком лазера и детектора, то можно использовать компрессор луча. Компрессор луча помещается на центральной оси между блоком лазера и детектора и дифракционной решеткой. Различные конструкции компрессора лазерного луча, известные из уровня техники, применимы в настоящем изобретении. Возможный пример показан схематично на фиг. 14 где компрессор луча 1400 включает в себя две линзы 1401 и 1402, разделенные расстоянием, равным сумме их соответственных фокальных длин f1 и f2. Диаметр пятна d и расстояние между пятнами h уменьшены на коэффициент γ , который является отношением фокальных длин линз 1401 и 1402. А именно,  где h1, d1 и h2, d2 представляют расстояние между пучками и диаметр пучка соответственно до и после того, как компрессор луча помещается между блоком лазера и детектора 1202 и дифракционной решеткой 1208 линейной головки, показанной схематично на фиг. 12, или между блоком лазера и детектора 1302 и дифракционной решеткой 1308 радиальной головки, показанной схематично на фиг. 13. Для конкретной конструкции оптической головки и ее размеров использование компрессора луча позволяет адаптировать настоящее изобретение к различным размерам дифракционных решеток и, тем самым, к различным размерам дисководов.
где h1, d1 и h2, d2 представляют расстояние между пучками и диаметр пучка соответственно до и после того, как компрессор луча помещается между блоком лазера и детектора 1202 и дифракционной решеткой 1208 линейной головки, показанной схематично на фиг. 12, или между блоком лазера и детектора 1302 и дифракционной решеткой 1308 радиальной головки, показанной схематично на фиг. 13. Для конкретной конструкции оптической головки и ее размеров использование компрессора луча позволяет адаптировать настоящее изобретение к различным размерам дифракционных решеток и, тем самым, к различным размерам дисководов.
V. Выводы
Кроме вышеописанного применения для записи шаблонов сервосистемы, система сервозаписи, соответствующая настоящему изобретению, может также использоваться для контроля качества и точности информации сервосистемы, записанной на диске, путем анализа сигналов считывания с магнитных головок записи 112 и электронных средства записи/считывания 144. Проверка может проводиться в процессе сервозаписи или после его завершения. Подсистема позиционирования привода головок может также использоваться для определения положения привода головок (или проверки качество) в дисководе с линейным приводом головок, в этом случае используется дифракционная решетка в форме прямоугольной полосы.
В более общем случае, настоящее изобретение может быть использовано для измерения и управления в системах позиционирования иных, чем используемые в дисководах, например, в системах регистрации, используемых в инструментальных средствах экспонирования в фотолитографии, в системах позиционирования манипуляторов роботов, в станках с числовым программным управлением, в линейных или поворотных платформах и фактически в любых других механических устройствах, приводимых в движение.
Хотя изобретение было описано и проиллюстрировано в отношении его предпочтительного варианта осуществления, специалистам в данной области техники должно быть ясно, что могут быть внесены изменения в упомянутое описание и иллюстрации в отношении формы и деталей, без изменения сущности изобретения. Соответственно, настоящее изобретение следует рассматривать как охватывающее все модификации и видоизменения, определяемые формулой изобретения.
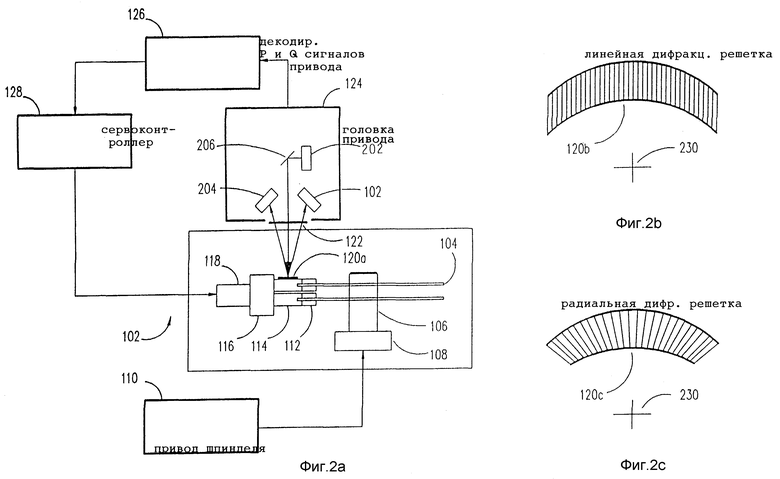
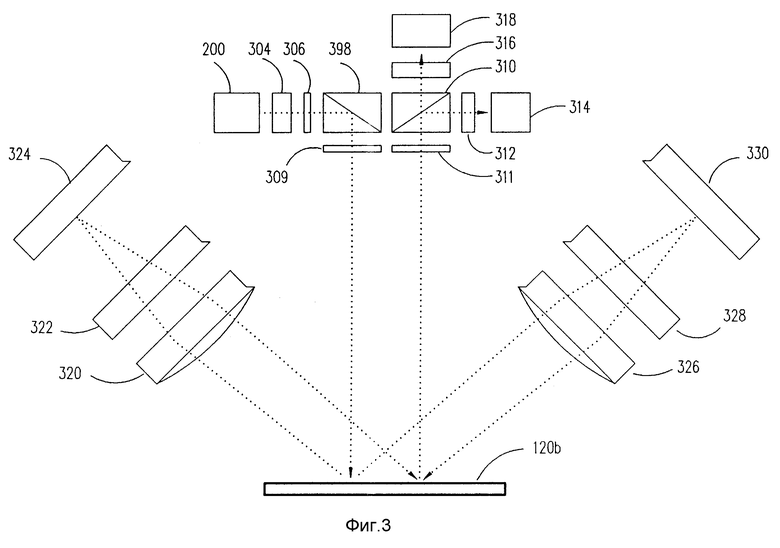
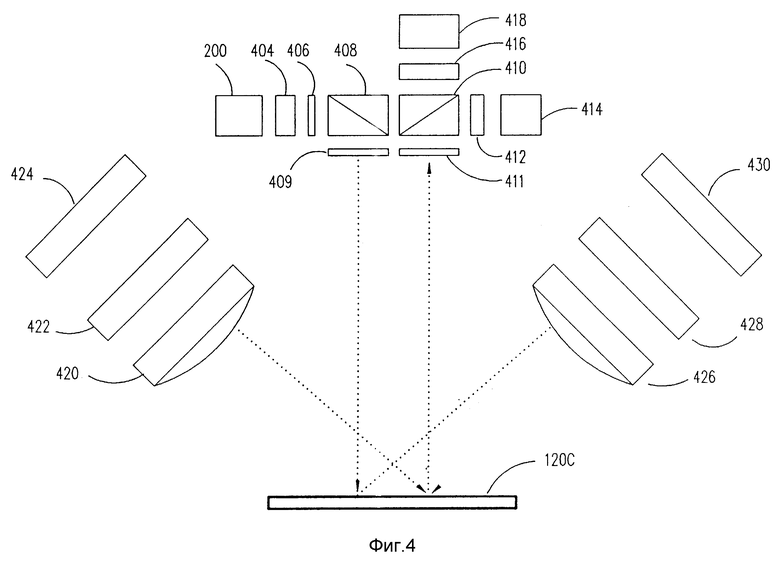
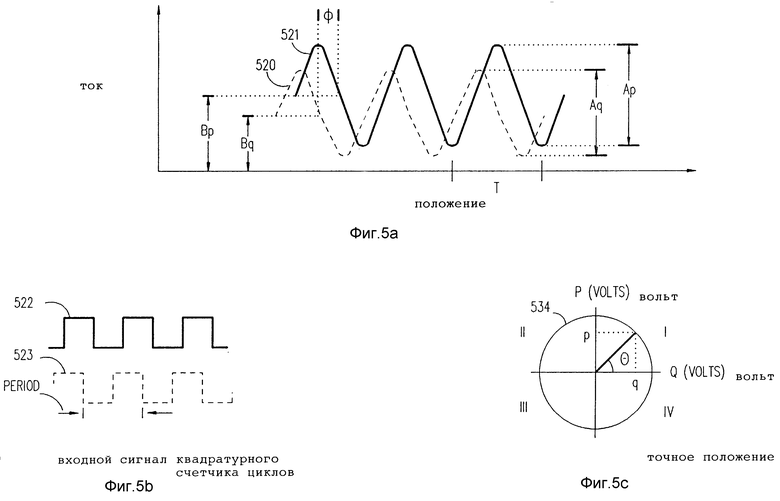
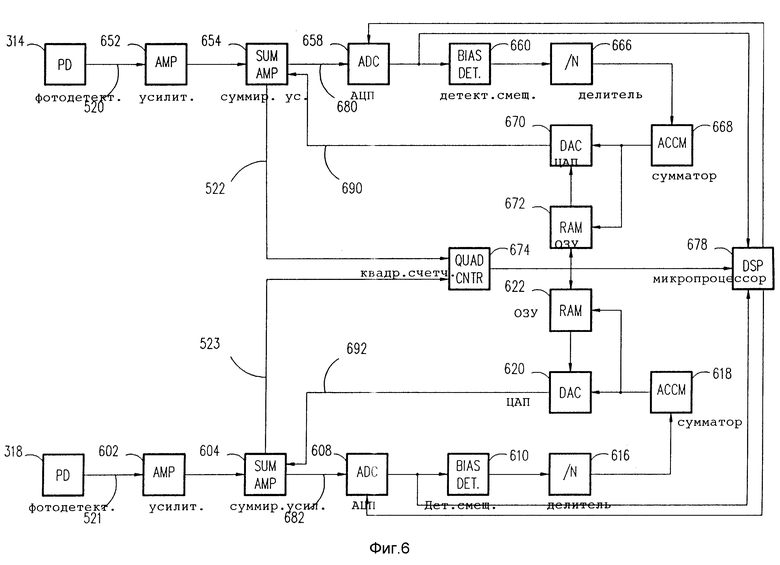
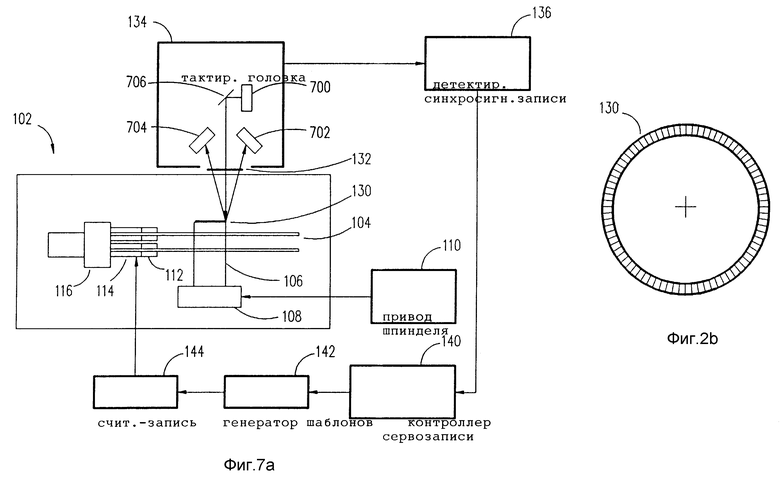
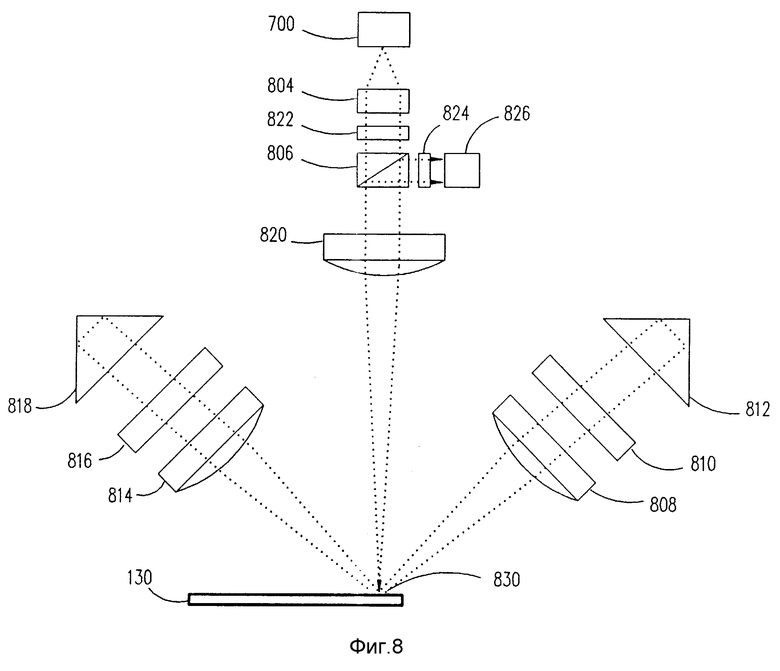
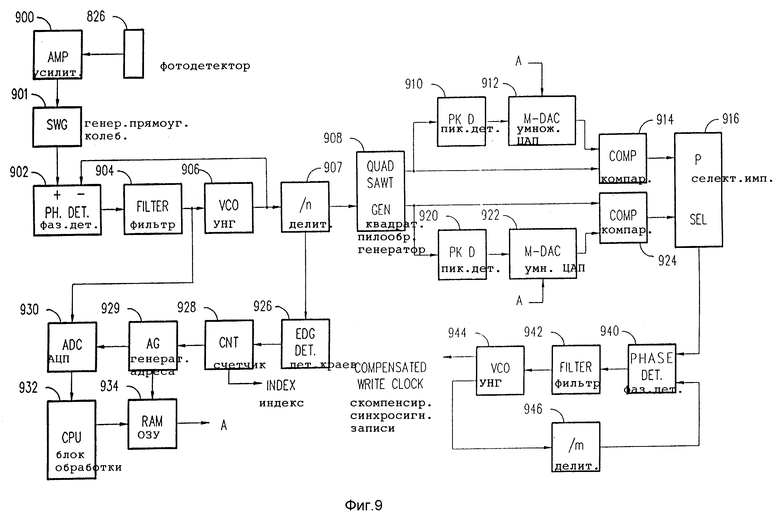
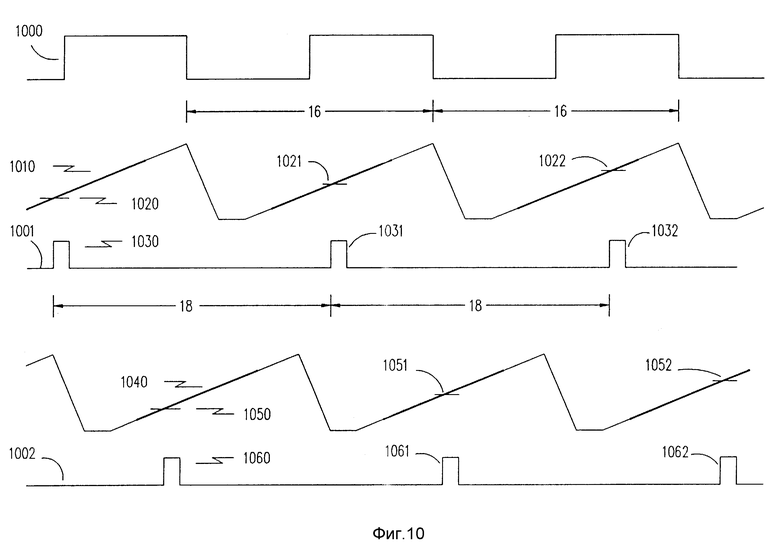
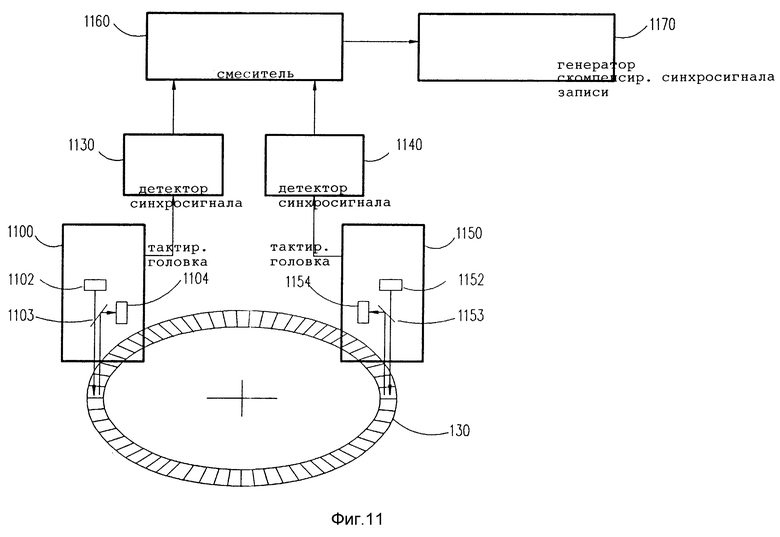
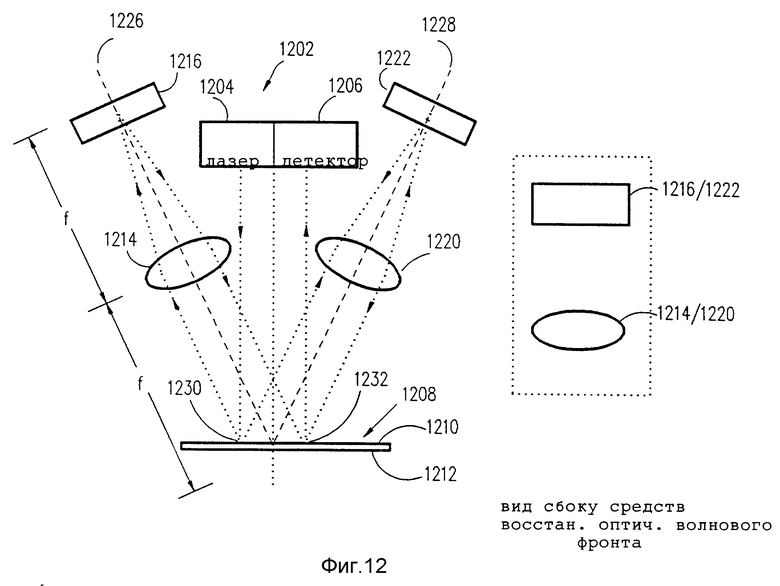
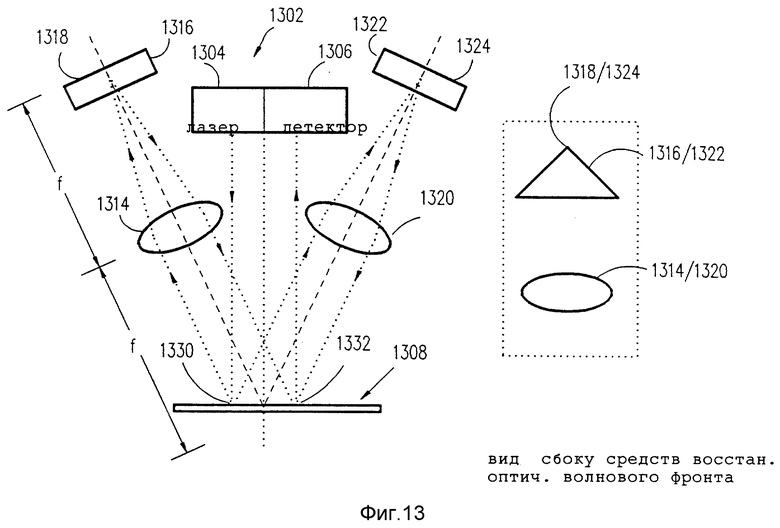
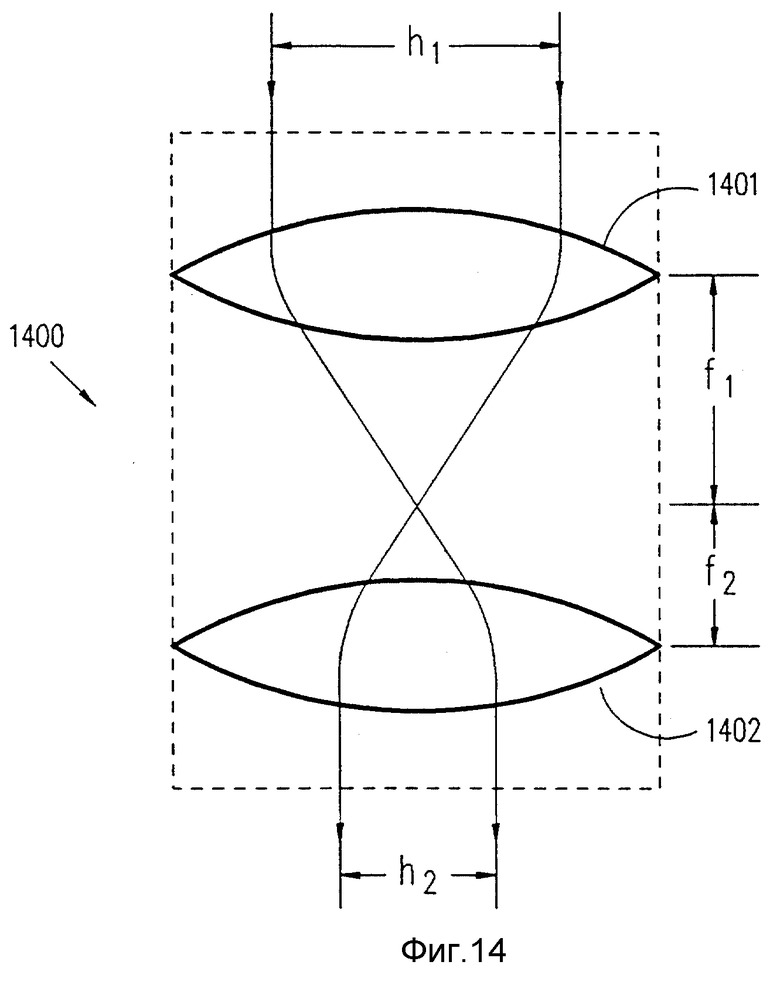
Система сервозаписи может использоваться в накопителях на дисках для записи информации. Система сервозаписи измеряет положение привода головок и формирует опорный синхросигнал с использованием полупроводниковых лазеров. Внутренние опорные сигналы для определения положения обеспечиваются отражательными дифракционными решетками, прикрепленными к рычагу привода головок и втулке шпинделя дисковода. Оптические средства восстановления волнового фронта обеспечивает коррекцию аберраций в дифракционной решетке. Оптические датчики воспринимают дифференциальные изменения в дифракционных картинах, создаваемых дифракционными решетками, исключая чувствительность к дрейфу частоты. Электронные средства декодирования преобразуют данные оптических датчиков в сигналы измерения положения привода. Электронные средства управления возбуждают двигатель линейного привода в дисководе, позиционирующий преобразователь записи в требуемое положение для записи сервоинформации, обеспечиваемой генератором шаблонов сервосистемы. Прозрачные окна в крышке узла, содержащего головку и диск, позволяют сервосистеме осуществлять запись в дисководах в полностью собранном и герметизированном состоянии. Система не требует вмешательства в конструкцию накопителя. Обеспечена эффективность при использовании в накопителях с высокой плотностью записи. 3 с. и 5 з.п. ф-лы, 20 ил.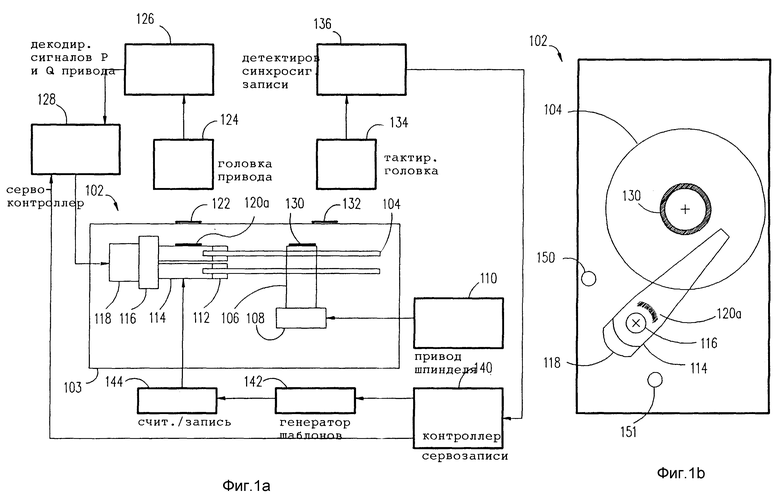
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Устройство для позиционирования головок записи-воспроизведения | 1984 |
|
SU1247936A2 |
| Устройство для магнитной записи на дисках | 1978 |
|
SU734804A1 |

