Изобретение относится к области автоматизации производственных технологических процессов и предназначено для контроля направления перемещения и положения металлических и неметаллических изделий и исполнительных механизмов технологического оборудования.
Известно устройство контроля направления перемещения и положения изделий (см. RU №2191346, кл. МПК7 G01B 7/00, опубликовано 20.10.2002), содержащее первый и второй чувствительные элементы, образующие чувствительный элемент устройства, генератор электрических колебаний, первый и второй пороговые элементы, первый и второй триггеры, блок установки в исходное состояние, выходную клемму. Но такое устройство имеет сравнительно сложную схему, что усложняет конструкцию, увеличивает трудоемкость на стадии производства и ухудшает его стоимостные характеристики. Наряду с этим данное устройство обладает ограниченными функциональными возможностями, так как в нем отсутствует возможность трансформирования его функциональных возможностей. Кроме того, в таком устройстве информация о контроле положения и перемещения изделий в прямом и обратном направлении содержится в одном информационном сигнале устройства, не разнесена по разным отдельным электрическим цепям и передается через одну выходную клемму, что ухудшает эксплуатационные характеристики устройства, так как при этом требуется применение дополнительных аппаратных и(или) программных средств для обработки информационного сигнала этого устройства, несущего по одному проводу совокупную информацию о контролируемых изделиях с целью разделения ее на отдельные информационные составляющие (контроль изделий в прямом направлении, контроль изделий в обратном направлении, контроль положения изделий), распределения их по раздельным электрическим цепям для нужд различных потребителей на объекте эксплуатации устройства.
Наиболее близким по технической сущности к предлагаемому решению является устройство контроля направления перемещения и положения изделий, содержащее первый и второй чувствительный элементы, образующие чувствительный элемент устройства, последовательно соединенные первые генератор электрических колебаний, детектор, пороговый элемент, последовательно соединенные вторые генератор электрических колебаний, детектор, пороговый элемент, а также блок установки в исходное состояние, первый и второй входы которого подключены к выходам соответственно первого и второго пороговых элементов, первый и второй триггеры, С-входы которых соединены с выходами соответствующих пороговых элементов, R-входы - с выходом блока установки в исходное состояние, а инверсные выходы первого и второго триггеров подключены к D-входам соответственно второго и первого триггеров, первую и вторую выходные клеммы, являющиеся соответственно первым и вторым выходами устройства (см. "Устройство для определения положения и направления перемещения контролируемого объекта". Информационный листок о научно-техническом достижении №84-6, Калужский межотраслевой территориальный центр научно-технической информации и пропаганды, 1984 г.).
Однако такое устройство обладает ограниченными функциональными возможностями, так как:
1) наряду с контролем направления перемещения и положения металлических контролируемых изделий не обеспечивает такой контроль неметаллических изделий, т.е. позволяет производить контроль ограниченной номенклатуры изделий. Этот недостаток обусловлен тем, что его первый и второй чувствительные элементы выполнены в виде чувствительных элементов индуктивного типа, обладающие чувствительностью только к металлическим изделиям, находящимся в зоне действия их электромагнитных полей;
2) в нем отсутствует возможность трансформирования его из устройства контроля направления перемещения изделий с двумя выходами в датчик контроля положения с одним выходом путем соединения его выходов между собой по схеме монтажное ИЛИ (т.е. в нем отсутствует возможность трансформирования его функциональных возможностей), так как его прямые выходы выполнены в виде выходов закрытого типа.
Решаемая задача изобретением - расширение функциональных возможностей устройства путем расширения номенклатуры контролируемых изделий и обеспечения трансформирования его функциональных возможностей.
Поставленная задача достигается тем, что в устройство контроля направления перемещения и положения изделий, содержащее первый и второй чувствительный элементы, образующие чувствительный элемент устройства, последовательно соединенные первые генератор электрических колебаний, детектор, пороговый элемент, последовательно соединенные вторые генератор электрических колебаний, детектор, пороговый элемент, а также блок установки в исходное состояние, первый и второй входы которого подключены к выходам соответственно первого и второго пороговых элементов, первый и второй триггеры, С-входы которых соединены с выходами соответствующих пороговых элементов, R-входы - с выходом блока установки в исходное состояние, инверсные выходы - с D-входами соответственно второго и первого триггеров, в него введены первый и второй блоки индикации, входы которых подключены к прямым выходам соответствующих триггеров, при этом каждый чувствительный элемент выполнен емкостным в виде металлической пластины любой геометрической формы, причем первый и второй чувствительные элементы установлены в одной плоскости вдоль прямой линии с зазором между их торцевыми поверхностями, обеспечивающим устранение взаимодействия электрического поля одного чувствительного элемента с другим чувствительным элементом, а первые плоские поверхности первого и второго чувствительных элементов подключены к входам соответствующих генераторов электрических колебаний, каждый из которых выполнен в виде мультивибратора, вместе с тем вторые плоские поверхности чувствительных элементов, направленные в одну сторону образуют чувствительную поверхность устройства, а прямые выходы первого и второго триггеров, являющиеся соответственно первым и вторым выходами устройства, выполнены в виде открытых выходов Н-типа, обеспечивающих трансформирование его из устройства контроля направления перемещения металлических и неметаллических изделий с двумя выходами в датчик контроля положения металлических и неметаллических изделий с одним выходом путем соединения между собой первого и второго выходов устройства.
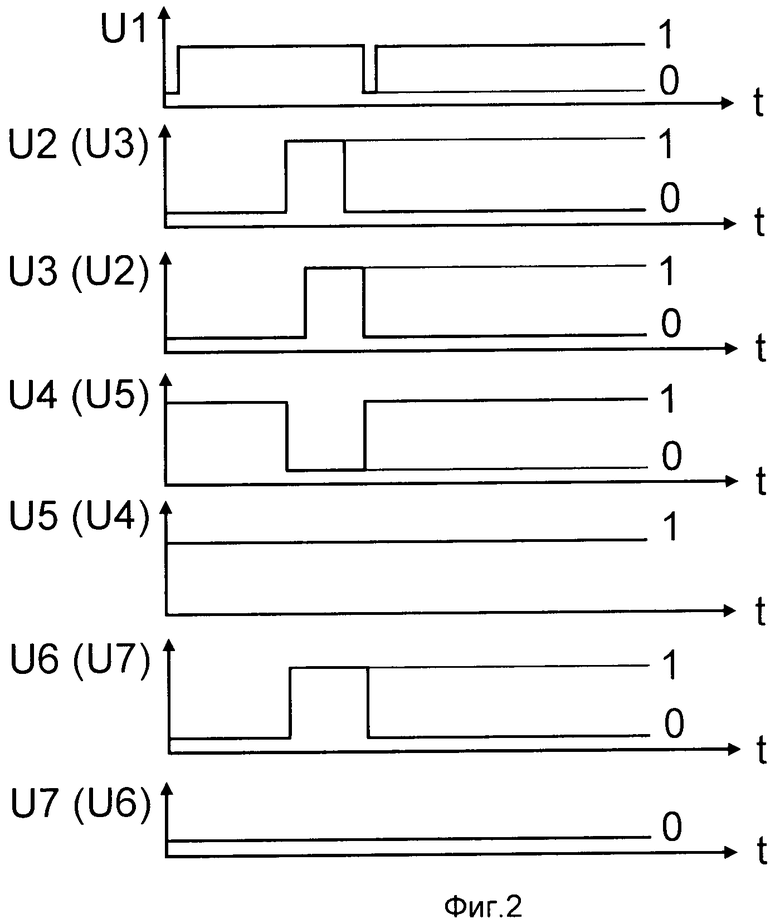
На фиг.1 представлена функциональная схема устройства; на фиг.2 - диаграммы напряжений, поясняющие работу устройства при срабатывании его от металлических и неметаллических изделий.
Устройство содержит (см. фиг.1) первый и второй чувствительные элементы 1, 2, последовательно соединенные первые генератор электрических колебаний 3, детектор 4, пороговый элемент 5, выполненный, например, по схеме триггера Шмитта, последовательно соединенные вторые генератор электрических колебаний 6, детектор 7, пороговый элемент 8, выполненный, например, по схеме триггера Шмитта, а также блок 9 установки в исходное состояние, первый и второй входы которого подключены к выходам соответственно первого и второго пороговых элементов 5 и 8, первый и второй триггеры 10, 11, С-входы которого соединены с выходами соответственно первого и второго пороговых элементов 5 и 8, R-входы - с выходом блока 9 установки в исходное состояние, инверсные выходы первого и второго триггеров 10 и 11 - с входами соответственно второго и первого триггеров 11 и 10, первый и второй блоки 12 и 13 индикации, входы которых подключены к прямым выходам соответственно первого и второго триггеров 10 и 11, первую и вторую выходные клеммы 14 и 15, подключенные к прямым выходам соответственно первого и второго триггеров 10 и 11 и являющиеся соответственно первым и вторым выходами устройства.
Прямые выходы триггеров 10, 11 выполнены в виде открытых выходов Н-типа (см. ГОСТ 2.743-91, таблица 4), например, на транзисторах р-n-р типа с открытыми коллекторами. Выполнение прямых выходов триггеров 10, 11 в виде открытых выходов Н-типа позволяет трансформировать устройство в другой тип устройства. Т.е. это позволяет трансформировать устройство с двумя выходами, обладающее функциональными возможностями устройства контроля направления перемещения контролируемых металлических и неметаллических изделий при радиальном их перемещении в датчик контроля положения металлических и неметаллических изделий с одним выходом при их радиальном и осевом перемещениях, что расширяет его функциональные возможности. Такое трансформирование осуществляется простым способом без изменения его схемы, конструкции и без дополнительных энергетических затрат путем соединения между собой выходных клемм 14 и 15 устройства. Причем прямые выходы триггеров 10, 11 выполнены с уровнями нагрузочной способности, обеспечивающими коммутацию подключаемых к ним нагрузок в виде управляющих обмоток электромагнитных пускателей и слаботочных электромагнитных реле. Кроме того, нагрузкой прямых выходов триггеров 10, 11 могут быть входы логических и аналоговых микросхем.
Каждый генератор 3 или 6 выполнен, например, в виде мультивибратора с подключенным к его входу емкостным чувствительным элементом, выполненного например, по схеме симметричного автогенератора прямоугольных импульсов на основе операционного усилителя (см книгу "Шило В.Л. Линейные интегральные схемы в радиоэлектронной аппаратуре. - М.: "Сов радио" 1974", с.155, рис.4.42, а).
Емкостной чувствительный элемент 1 (2), подключенный в цепи отрицательной обратной связи к инвертирующему входу операционного усилителя мультивибратора, является одной из обкладок частотозадающего "раскрытого конденсатора", второй обкладкой которого являются электрические цепи общей "земли" мультивибратора и устройства в целом, и служит емкостным чувствительным элементом мультивибратора (см. журнал "Радио", №10, 2002, с.38, рис.1, с.39, рис.3). При этом каждый емкостной чувствительный элемент 1 или 2 выполнен в виде металлической пластины. Между торцевыми поверхностями емкостных чувствительных элементов 1 и 2 имеется гарантированный зазор. Минимальная ширина этого зазора выбирается такой, чтобы исключить возможность взаимодействия электрического поля одного емкостного чувствительного элемента с торцевыми и плоскими поверхностями другого емкостного чувствительного элемента, наличие которого приводит к взаимным наводкам в электрических схемах генераторов 3, 6 и, как следствие, к нарушению устойчивости работы электрической схемы устройства. При этом емкостной чувствительный элемент 1 или 2 может быть выполнен различной геометрической формы, например, треугольной, квадратной, прямоугольной, пяти- или шестиугольной и другой формы, т.е. любой геометрической формы, которая обеспечивала бы размером своей площади образование при взаимодействии его с контролируемым изделием электрического конденсатора с необходимым значением электрической емкости, достаточной для возникновения режима генерации электрических колебаний мультивибратора. Причем первые плоские поверхности емкостных чувствительных элементов 1 и 2 подключены к входам соответственно генераторов 3 и 6, а вторые плоские поверхности емкостных чувствительных элементов 1 и 2, направленные в одну сторону, т.е. в сторону контролируемого изделия 16, образуют чувствительную поверхность устройства.
Расположение в пространстве емкостных чувствительных элементов 1, 2 в одной плоскости вдоль прямой линии и с зазором между их торцевыми поверхностями всегда обеспечивает при радиальном перемещении контролируемого изделия 16 по стрелке 17 (18) относительно чувствительного элемента устройства параллельно его чувствительной поверхности в пределах действия электрических полей 19 и 20 последовательное взаимодействие контролируемого изделия 16 с емкостным чувствительным элементом 2 (1) и с емкостным чувствительным элементом 1 (2). При этом:
1) происходит последовательно сначала взаимодействие металлического или неметаллического контролируемого изделия 16 с электрическим полем 19 (20), потом пересечение им электромагнитного поля 20 (19), оставаясь при этом в зоне действия электрического поля 19 (20), и затем, оставаясь в зоне действия электрического поля 20 (19), оно выходит из зоны действия электрического поля 19 (20) и, на последнем отрезке своего перемещения контролируемое изделие 16 выходит из зоны действия электрического поля 20 (19) и, следовательно, из зоны действия чувствительной поверхности устройства;
2) при пересечении контролируемым изделием 16 электрического поля 19 происходит на выходе порогового элемента 8 формирование импульса напряжения с уровнем логической "1" длительностью, равной длительности нахождения контролируемого изделия в электрическом поле 19 емкостного чувствительного элемента 2;
3) при пересечении контролируемым изделием 16 электрического поля 20 происходит на выходе порогового элемента 5 формирование импульса напряжения с уровнем логической "1" длительностью, равной длительности нахождения контролируемого изделия в электрическом поле 20 емкостного чувствительного элемента 1;
4) расстановка на временной оси сформированных таким образом импульсов всегда обеспечивает задержку импульса выходного напряжения U3 (U2) с уровнем логической "1" порогового элемента 5 (8) относительно импульса выходного напряжения U2 (U3) с уровнем логической "1" порогового элемента 8 (5) на время меньшее, чем длительность импульса напряжения U2 (U3) порогового элемента 8 (5).
Выполнение чувствительных 1, 2 устройства емкостными, соответствующее расположение их в пространстве и взаимодействие их в описанной выше последовательности с контролируемым изделием 16, а также соответствующая обработка предложенной схемой устройства выходных сигналов генераторов 3, 6 позволяют реализовать принцип действия устройства в режиме контроля направления перемещения металлических и неметаллических изделий и расширить номенклатуру контролируемых изделий, что в свою очередь расширяет функциональные возможности устройства.
Каждый детектор 4 или 7 выполнен, например, по схеме диодного пассивного преобразователя амплитудных значений переменного напряжения в постоянное с последовательным включением выпрямительного диода с выходной нагрузкой в виде параллельной RC - цепи (см книгу "Волгин Л.И. Измерительные преобразователи переменного напряжения в постоянное. М.: "Сов. радио", 1977”, с.174, рис.4.9, б).
Блоки 12, 13 предназначены для визуального контроля режимов работы устройства, определения направления перемещения и положения контролируемых изделий, а также для тестирования исправного состояния или отказов устройства. Кроме того, с помощью блоков 12, 13 производится визуальный контроль за подачей на внешние нагрузки (на фиг.1 не показаны) сигналов управления с прямых выходов соответственно триггера 10 и триггера 11.
Каждый блок 12, 13 индикации выполнен, например, на основе (см. фиг.1) последовательно соединенных резистора, подключенного первым выводом к прямому выходу триггера 10 или к прямому выходу триггера 11, и светодиода, катод которого подключен к общей "земле" схемы устройства.
При работе устройства в режиме контроля направления перемещения контролируемых изделий происходит засвечивание светодиода блока 13, когда контролируемое изделие 16 перемещается радиально в направлении по стрелке 17 или светодиода блока 12, когда перемещение его происходит радиально в направлении по стрелке 18. В случае отказа устройства при работе его в этом режиме оба светодиода в одном или обоих указанных направлениях перемещения контролируемого изделия 16 остаются в погашенном состоянии.
При работе устройства в режиме датчика контроля положения контролируемых изделий при радиальном перемещении их в направлении по стрелке 17 (18) или при осевом перемещении их в направлении по стрелке 26 происходит засвечивание обоих светодиодов блоков 12, 13, так как выходы устройства включены по схеме монтажное ИЛИ. В случае отказа устройства при работе его в этом режиме оба светодиода блоков 12, 13 не засвечиваются в одном или двух, или во всех трех указанных направлениях перемещения контролируемого изделия 16.
Блок 9 установки в исходное состояние выполнен, например, по схеме (см. фиг.1), содержащей логический элемент ИЛИ-НЕ 21, первый и второй входы которого являются соответственно первым и вторым входами блока 9, инвертор 22, вход которого соединен через конденсатор 23 с выходом логического элемента ИЛИ-НЕ 21, а его выход является выходом блока 9, резистор 24, диод 25, вывод катода которого и первый вывод резистора 24 подключены к входу инвертора 22, а вывод анода диода 25 и второй вывод резистора 24 соединены с общей "землей” блока 9. Блок 9 предназначен для установки триггеров 10, 11 и, следовательно, устройства в исходное состояние в момент подачи на него напряжения питания и в моменты появления заднего фронта импульса выходного напряжения U3 (U2) порогового элемента 5 (8).
Устройство работает следующим образом.
В момент подачи напряжения питания при нахождении контролируемого изделия 16 вне зоны чувствительной поверхности устройства (см. фиг.1) на выходе логического элемента 21 блока 9 устанавливается напряжение питания с уровнем логической "1". В результате происходит заряд конденсатора 23 через резистор 24 и формирование на резисторе 24 и входе инвертора 22 короткого импульса напряжения с уровнем логической "1". После чего на выходе инвертора 22 формируется короткий импульс напряжения U1 с уровнем логического "0" (см. фиг.2). Этот импульс устанавливает триггеры 10, 11 в исходное состояние, при котором на их прямых выходах, на входах блоков 12 и 13, на клеммах 14 и 15 устанавливаются соответственно напряжения U7 и U6 с уровнями логического "0", а на их инверсных выходах и D-входах устанавливаются соответственно напряжения U5 и U4 с уровнями логической "1". Светодиоды блоков 12 и 13 переходят в погашенное состояние. Вместе с тем генераторы 3, 6 переходят в заторможенное состояние, соответствующее режиму срыва генерации электрических колебаний, при котором на их выходах, на входах и выходах детекторов 4, 7, на входах пороговых элементов 5, 8 устанавливаются напряжения с уровнями логического "0". В результате пороговые элементы 5, 8 устанавливаются в такое состояние, при котором на их выходах устанавливаются соответственно напряжения U3 и U2 с уровнями логического "0", которые подаются соответственно на первый вход блока 9, С-вход триггера 10 и второй вход блока 9, С-вход триггера 11. После окончания заряда конденсатора блока 9 на его выходе и R-входах триггеров 10, 11 устанавливается напряжение U1 с уровнем логической "1".
Таким образом, после подачи напряжения питания устройство устанавливается в исходное состояние, при котором контролируемое изделие 16 находится за пределами зоны чувствительной поверхности устройства, на клеммах 14 и 15 устанавливаются соответственно напряжения U7 и U6 с уровнями логического "0", светодиоды блоков 12, 13 находятся в погашенном состоянии, и устройство готово к первому циклу контроля металлических или неметаллических изделий.
Далее рассмотрим работу предлагаемого устройства в режиме контроля направления перемещения и в режиме датчика контроля положения металлических и неметаллических изделий.
1. Работа устройства в режиме контроля направления перемещения металлических и неметаллических изделий.
Предварительно для определенности условно примем, что направление перемещения контролируемого изделия 16 по стрелке 17 будем считать прямым направлением, а перемещение его по стрелке 18 - обратным направлением.
При радиальном перемещении контролируемого изделия 16 в направлении, например, по стрелке 17 (18) оно последовательно входит в зоны действия электрических полей 19 (20) и 20 (19) соответственно емкостных чувствительных элементов 2 (1) и 1 (2) и образует с ними электрические конденсаторы. Значение электрической емкости образованных таким образом конденсаторов достигает такого уровня, при котором происходит возбуждение генераторов 6, 3 и переход их в режим генерации электрических колебаний. Амплитуды выходных импульсов генераторов 6 и 3 преобразуются соответственно детекторами 7 и 4 в постоянные напряжения с уровнями логической "1", которые превышают входные пороговые значения напряжений соответственно триггеров пороговых элементов 8 и 5. При этом последние переключаются в другие состояния, при которых на их выходах устанавливаются соответственно напряжения U2 и U3 с уровнями логической "1" (см. фиг.2), которые подаются соответственно на второй вход блока 9, С-вход триггера 11 и первый вход блока 9, С-вход триггера 10. При этом по переднему фронту импульса напряжения U2 (U3) происходит переключение триггера 11 (10) в другое состояние, при котором на его прямом выходе и клемме 15 (14) устанавливается напряжение U6 (U7) с уровнем логической "1", несущее информацию о контроле перемещения контролируемого изделия 16 в прямом (обратном) направлении. При этом на инверсном выходе триггера 11 (10) устанавливается напряжение U4 (U5) с уровнем логического "0", которое подается на D-вход триггера 10 (11). Причем по переднему фронту задержанного импульса напряжения U3 (U2) с уровнем логической "1" переключения триггера 10 (11) в другое состояние не происходит, и на его прямом выходе и клемме 14 (15) продолжает присутствовать напряжение U7 (U6) с уровнем логического "0", так как на его D - вход с инверсного выхода триггера 11 (10) подано напряжение U4 (U5) с уровнем логического "0", запрещающее его переключение. Далее при выходе контролируемого изделия 16 из зоны действия электрического поля 20 (19) емкостного чувствительного элемента 1 (2), т.е. за пределы чувствительной поверхности устройства, генератор 3 (6) переходит в режим срыва генерации электрических колебаний, т.е. в исходное состояние. В результате пороговый элемент 5 (8) переключается также в исходное состояние, при котором на его выходе, первом (втором) входе блока 9, С-входе триггера 10 (11) устанавливается напряжение U3 (U2) с уровнем логического "0". По заднему фронту импульса напряжения U3 (U2) на выходе блока 9 (см. фиг.2) происходит формирование короткого импульса напряжения U1 с уровнем логического "0", который подается на R-входы триггеров 10, 11 и устанавливает триггер 11 (10) в исходное состояние. На этом формирование импульса напряжения U6 (U7) с уровнем логической "1", несущего информацию о контроле перемещения изделия 16 в прямом (обратном) направлении, на прямом выходе триггера 11 (10) и клемме 15 (14) заканчивается, и устройство устанавливается в исходное состояние, которое описано выше после подачи напряжения питания на устройство. При повторном прохождении контролируемого изделия 16 относительно чувствительной поверхности устройства описанный выше в соответствии с диаграммами, приведенными на фиг.2, цикл контроля направления перемещения изделия 16 повторяется.
Следовательно, при радиальном перемещении металлического или неметаллического изделия в прямом направлении относительно чувствительной поверхности устройства на клемме 15 устройства отрабатывается потенциальный информационный сигнал напряжения U6 с уровнем логической "1", несущий информацию о перемещении контролируемого изделия в прямом направлении, а на его клемме 14 при этом присутствует напряжение U7 с уровнем логического "0". Работа устройства при этом описывается диаграммами U1-U7, приведенными на фиг.2. При радиальном перемещении металлического или неметаллического изделия в обратном направлении относительно чувствительной поверхности устройства на клемме 14 устройства отрабатывается потенциальный информационный сигнал напряжения U7 с уровнем логической "1", несущий информацию о перемещении контролируемого изделия в обратном направлении, а на его клемме 15 при этом присутствует напряжение U6 с уровнем логического "0". Работа устройства при этом описывается диаграммами U1, (U2)-(U7), приведенными на фиг.2.
2. Работа устройства в режиме датчика контроля положения металлических и неметаллических изделий.
В этом режиме выходные клеммы 14, 15 замкнуты между собой. Исходное состояние образованного таким образом датчика аналогично исходному состоянию устройства, описанному выше после подачи напряжения питания на устройство.
Устройство обеспечивает в этом режиме контроль положения металлических и неметаллических изделий при радиальном их перемещении по стрелке 17(18) и при осевом их перемещении по стрелке 26.
При радиальном перемещении контролируемого изделия 16 в направлении по стрелке 17 (18) (см фиг.1) в зону чувствительной поверхности устройства работа его описывается диаграммами U1-U7 [U1, (U2)-(U7)], приведенными на фиг.2. При этом на выходе образованного таким образом датчика отрабатывается информационный сигнал напряжения U6 (U7) с уровнем логической "1" и происходит засвечивание светодиодов блоков 12, 13 индикации на время, равное времени нахождения контролируемого изделия 16 в зоне действия чувствительной поверхности устройства.
При осевом перемещении контролируемого изделия 16 в направлении по стрелке 26 (см. фиг.2) в зону действия чувствительной поверхности устройства и обратно в исходное положение работа его описывается диаграммами U1-U7, приведенными на фиг.2, если электрические параметры серийного образца устройства на стадии производства настроены таким образом, что дальность действия электрического поля 19 емкостного чувствительного элемента 2 превышает дальность действия электрического поля 20 емкостного чувствительного элемента 1, или диаграммами [U1, (U2)-(U7)], приведенными на фиг.2, если при этом дальность действия электрического поля 20 емкостного чувствительного элемента 1 превышает дальность действия электрического поля 19 емкостного чувствительного элемента 2. При этом на выходе образованного таким образом датчика отрабатывается информационный сигнал напряжения U6 (U7) с уровнем логической "1", и происходит засвечивание светодиодов блоков 12, 13 индикации на время, равное времени нахождения контролируемого изделия 16 в зоне действия чувствительной поверхности устройства.
Таким образом, из описания схемы и работы устройства следует, что при радиальном перемещении металлического или неметаллического контролируемого изделия в направлении в зоны действия чувствительной поверхности устройства потенциальный информационный сигнал на его клемме 14 однозначно соответствует прохождению относительно чувствительной поверхности устройства контролируемого изделия в одном (прямом) направлении, а потенциальный информационный сигнал на клемме 15 - прохождению контролируемого изделия в другом (обратном) направлении, чем и обеспечивается идентификация (распознавание) направления перемещения контролируемых металлических и неметаллических изделий.
При соединении между собой клемм 14, 15 устройства происходит трансформирование его в датчик контроля положения металлических и неметаллических изделий с одним выходом. При этом соединенные между собой клеммы 14, 15 образуют выход датчика. При радиальном или осевом перемещениях относительно чувствительной поверхности образованного таким образом датчика контролируемого металлического или неметаллического изделия на его выходе отрабатывается потенциальный сигнал напряжения с уровнем логической "1", несущий информацию о контроле положения металлического или неметаллического изделия.
Таким образом, из описания схемы и работы устройства следует, что выполнение выходов первого и второго логических элементов И в виде открытых выходов Н-типа дополнительно расширяет его функциональные возможности путем трансформирования его в датчик контроля положения нагретых металлических и неметаллических изделий с одним выходом при радиальном и осевом их перемещениях, а выполнение чувствительных элементов емкостными дополнительно расширяет его функциональные возможности путем обеспечения идентификации направления перемещения как металлических, так и неметаллических изделий при радиальном перемещении их относительно чувствительной поверхности устройства.
Изобретение относится к области автоматизации производственных технологических процессов и предназначено для контроля направления перемещения и положения металлических и неметаллических изделий. Технический результат: расширение функциональных возможностей устройства. Сущность: при перемещении изделия в выбранном направлении относительно чувствительного элемента устройства, образованного первым и вторым емкостными чувствительными элементами, происходит его взаимодействие последовательно с электрическими полями первого и второго емкостных чувствительных элементов. При этом на первом выходе устройства отрабатывается потенциальный информационный сигнал с уровнем логической "1", несущий информацию о перемещении контролируемого изделия в прямом направлении. На втором выходе устройства при этом присутствует напряжение с уровнем логического "0". В случае перемещения изделия относительно чувствительного элемента в обратном направлении происходит его взаимодействие последовательно с электрическими полями второго и первого емкостных чувствительных элементов. В этом случае потенциальный информационный сигнал с уровнем логической "1", несущий информацию о перемещении контролируемого изделия в обратном направлении, отрабатывается только на втором выходе устройства. При этом на первом выходе устройства присутствует напряжение с уровнем логического "0". При соединении между собой первого и второго выходов устройства оно трансформируется в датчик контроля положения изделий с одним выходом при их радиальном и осевом перемещениях. 2 ил.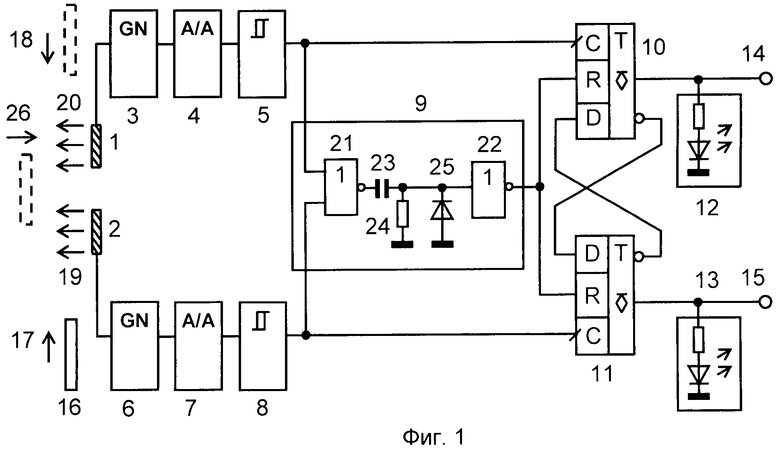
Устройство контроля направления перемещения и положения изделий, содержащее первый и второй чувствительный элементы, образующие чувствительный элемент устройства, последовательно соединенные первые генератор электрических колебаний, детектор, пороговый элемент, последовательно соединенные вторые генератор электрических колебаний, детектор, пороговый элемент, а также блок установки в исходное состояние, первый и второй входы которого подключены к выходам соответственно первого и второго пороговых элементов, первый и второй триггеры, С-входы которых соединены с выходами соответствующих пороговых элементов, R-входы - с выходом блока установки в исходное состояние, инверсные выходы - с D-входами соответственно второго и первого триггеров, отличающееся тем, что в него введены первый и второй блоки индикации, входы которых подключены к прямым выходам соответствующих триггеров, при этом каждый чувствительный элемент выполнен емкостным в виде металлической пластины любой геометрической формы, причем первый и второй чувствительные элементы установлены в одной плоскости вдоль прямой линии с зазором между их торцевыми поверхностями, обеспечивающим устранение взаимодействия электрического поля одного чувствительного элемента с другим чувствительным элементом, а первые плоские поверхности первого и второго чувствительных элементов подключены к входам соответствующих генераторов электрических колебаний, каждый из которых выполнен в виде мультивибратора, вместе с тем вторые плоские поверхности чувствительных элементов, направленные в одну сторону, образуют чувствительную поверхность устройства, а прямые выходы первого и второго триггеров, являющиеся соответственно первым и вторым выходами устройства, выполнены в виде открытых выходов Н-типа, обеспечивающих трансформирование его из устройства контроля направления перемещения металлических и неметаллических изделий с двумя выходами в датчик контроля положения металлических и неметаллических изделий с одним выходом путем соединения между собой первого и второго выходов устройства.
| УСТРОЙСТВО ИДЕНТИФИКАЦИИ И КОНТРОЛЯ ПОЛОЖЕНИЯ ИЗДЕЛИЙ | 2008 |
|
RU2384816C1 |
| RU 23444372 C1, 20.01.2009 | |||
| Бесконтактный сигнализатор положения | 1989 |
|
SU1693360A1 |
| US 20090219039 A1, 03.09.2009. | |||

