Фиг Л
Изобретение относится к измерительной технике и может быть использовано для сигнализации положения движущихся объектов в устройствах автоматики и телемеханики.
Цель изобретения - повышение помехоустойчивости .
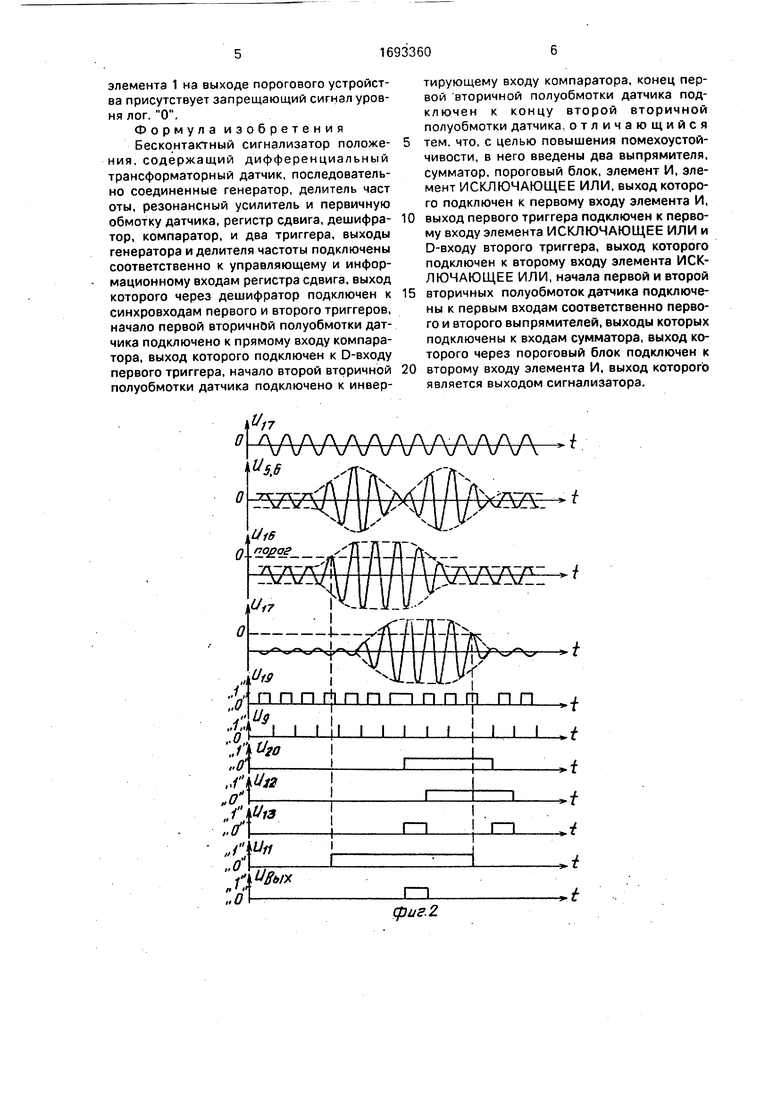
На фиг.1 изображена блок-схема сигнализатора; на фиг.2 - временная диаграмма работы сигнализатора.
Сигнализатор содержит датчик 1, в состав которого входят якорь 2, сердечник 3, первичная обмотка 4, вторичные полуобмотки 5 и 6, резонансный усилитель 7, регистр 8 сдвига, дешифратор 9, генератор 10, пороговый блок 11, триггер 12, элемент ИСКЛЮЧАЮЩЕЕ ИЛИ 13, элемент И 14, делитель 15 частоты, выпрямители 16 и 17, сумматор 18, компаратор 19 и триггер 20.
Выход триггера 20 подключен к первому входу элемента 13 ИСКЛЮЧАЮЩЕЕ ИЛИ 13 и D-входу триггера 12, выход которого подключен к второму входу элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 13, выход которого подключен к первому входу элемента И 14, выход которого является выходом устройства.
Сигнализатор работает следующим образом.
При протекании переменного тока через обмотку 4 чувствительного элемента 1 в обмотках 5 и 6, расположенных на крайних стержнях Ш-образного сердечника 3, индуцируются электродвижущие силы (ЭДС). При приближении подвижного объекта (не показан) и, следовательно, связанного с ним якоря 2 к Ш-образному сердечнику 3, якорь 2 магнитного чувствительного элемента располагается таким образом, что уменьшает воздушный зазор между магни- топроводами,на которых, например, расположены обмотка 5 и обмотка 4, при этом увеличивается ЭДС в обмотке 5 (Us). 8 этом случае на вход фазочувствительного компаратора 19 поступает сигнал, фаза которого определяется фазой ЭДС обмотки 5 (Us). При дальнейшем движении подвижного объекта якорь 2 чувствительного элемента 1 располагается таким образом, что уменьшаться воздушный зазор между магнито- проводами, на которых расположены обмотки 6 и 4, при этом увеличивается ЭДС в обмотке 6 (Ue). В определенный момент движения подвижного объекта якорь 2 чувствительного элемента 1 принимает такое положение, что ЭДС обмотки 6 (Ue) превышает ЭДС обмотки 5 (Us), фаза сигнала на первом входе компаратора 7 изменяется на 180°. При этом положительная полуволна сигнала на первом входе компаратора совпадает с положительным фронтом сигнала на выходе дешифратора 9 (Ug). В момент изменния фазы сигнала на первом входе компаратора 19 и поступления на второй его
вход положительного фронта сигнала от дешифратора происходит,изменение уровня логического сигнала на выходе триггера 20, что вызываетизменение уровня логического сигнала на выходе элемента ИСКЛЮЧАЮ0 ЩЕЕИЛИ13(и1з).
На выходе элемента И 14 (ивых) появляется сигнал, фиксирующий момент изменения фазы при прохождении якоря 2 над Ш-образным сердечником 3. После измене5 ния уровня логического сигнала на выходе триггера 20 (U2o) при поступлении следующего импульса с выхода дешифратора 9 на вход синхронизации триггера 12 происходит изменение уровня логического сигнала
0 на его выходе (Ui2), что вызывает изменение уровня логического сигнала на выходе элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 13 (Ui3), и закончится формирование выходного сигнала. У чувствительного элемента 1 имеется лож5 ное состояние изменения фазы выходного сигнала, что обусловлено некоторой несимметричностью обмоток 5 и 6, вызванной погрешностями при их изготовлении. Ложное состояние изменения фазы может возник0 нуть, например, при дальнейшем движении подвижного объекта, связанного с якорем 2. В этом случае якорь 2 проходит рабочую зону чувствительного элемента, т.е. зону, где якорь 2 находится над магнитопровода5 ми обмоток 5 и (или) 6 и при удалении его от Ш-образного сердечника 3 может возникнуть момент изменения фазы выходного сигнала, если остаточная ЭДС обмотки 5 больше остаточной ЭДС обмотки 6.
0 Под остаточной ЭДС понимается ЭДС, наводимая в обмотке на крайнем стержне сердечника 3 при достаточном удалении якоря 2, когда его влиянием можно пренебречь. Указанное изменение фазы выходного
5 сигнала чувствительного элемента 1 вызывает изменение уровня логического сигнала на выходе триггеров 20 и 12 и элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 13 но при этом на выходе элемента И 14 появляется сигнал,
0 так как на выходе порогового устройства 11 сигнал (Un), запрещающий формирование сигнала на выходе элемента И 14 (ивых.). При нахождении якоря 2 в рабочей зоне чувствительного элемента 1 величина ЭДС обмоток
5 5 и 6 (Us, Ue) значительно превышает остаточные ЭДС этих обмоток, поэтому пороговый блок 11 формирует на своем выходе сигнал лог. Т, т.е. сигнал разрешения формирования сигнала на выходе элемента И 14 (ивых.). Вне рабочей зоны чувствительного
элемента 1 на выходе порогового устройства присутствует запрещающий сигнал уровня лог. О.
Формула изобретения Бесконтактный сигнализатор положе- ния, содержащий дифференциальный трансформаторный датчик, последовательно соединенные генератор, делитель част оты, резонансный усилитель и первичную обмотку датчика, регистр сдвига, дешифра- тор, компаратор, и два триггера, выходы генератора и делителя частоты подключены соответственно к управляющему и информационному входам регистра сдвига, выход которого через дешифратор подключен к синхровходам первого и второго триггеров, начало первой вторичной полуобмотки датчика подключено к прямому входу компаратора, выход которого подключен к D-входу первого триггера, начало второй вторичной полуобмотки датчика подключено к инвертирующему входу компаратора, конец первой вторичной полуобмотки датчика подключен к концу второй вторичной полуобмотки датчика отличающийся тем. что, с целью повышения помехоустойчивости, в него введены два выпрямителя, сумматор, пороговый блок, элемент И, элемент ИСКЛЮЧАЮЩЕЕ ИЛИ, выход которого подключен к первому входу элемента И, выход первого триггера подключен к первому входу элемента ИСКЛЮЧАЮЩЕЕ ИЛИ и D-входу второго триггера, выход которого подключен к второму входу элемента ИСКЛЮЧАЮЩЕЕ ИЛИ, начала первой и второй вторичных полуобмоток датчика подключены к первым входам соответственно первого и второго выпрямителей, выходы которых подключены к входам сумматора, выход которого через пороговый блок подключен к второму входу элемента И, выход которого является выходом сигнализатора.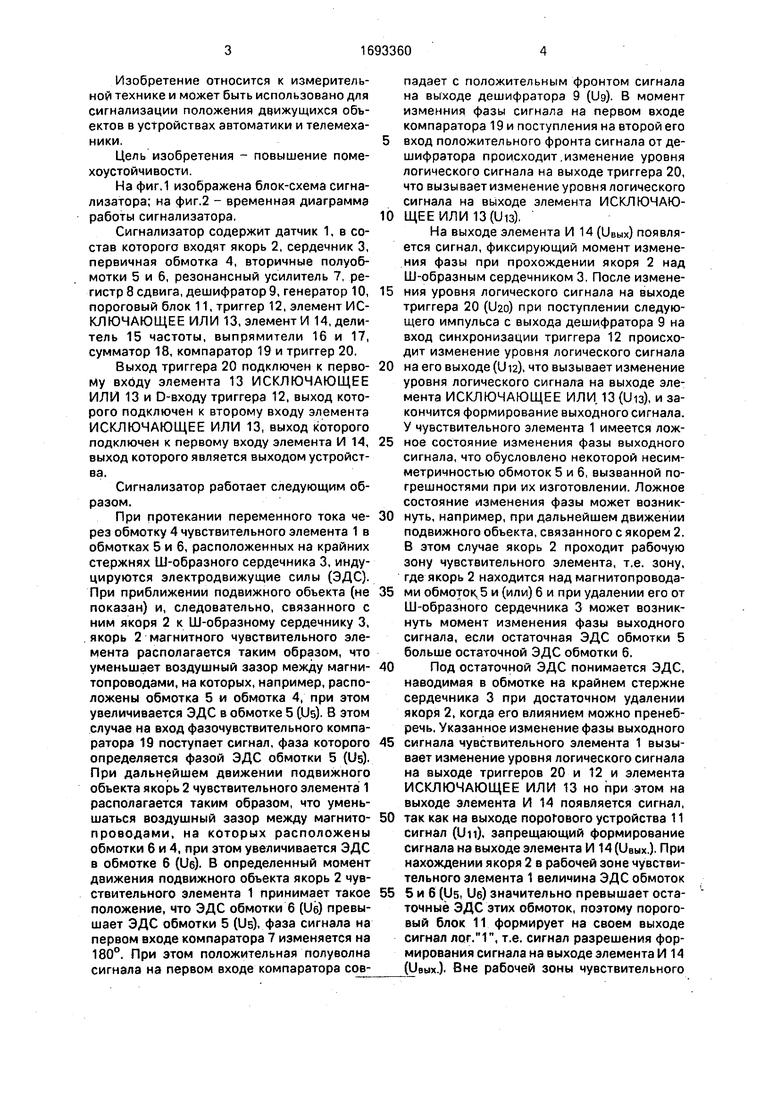
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесконтактный сигнализатор положения | 1988 |
|
SU1551970A1 |
| Способ пуска синхронной машины | 1990 |
|
SU1757073A1 |
| Устройство для управления однофазным автономным инвертором | 1987 |
|
SU1615845A1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ВОЗБУЖДЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА С ВНЕШНЕЙ ФОРСИРОВКОЙ | 2019 |
|
RU2723989C1 |
| Двухтактный преобразователь напряжения | 1980 |
|
SU982161A1 |
| СИСТЕМА ВОЗДУЖДЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА С ВНЕШНЕЙ ФОРСИРОВКОЙ | 2012 |
|
RU2510698C1 |
| Реверсивный вентильный электродвигатель с регулируемым торможением | 1985 |
|
SU1283928A1 |
| СИСТЕМА ВОЗБУЖДЕНИЯ СИНХРОННОГО ГЕНЕРАТОРА С ФОРСИРОВКОЙ И КОРРЕКТОРОМ ПАРАЛЛЕЛЬНОЙ РАБОТЫ | 2023 |
|
RU2811685C1 |
| Вентильный электропривод | 1989 |
|
SU1746482A1 |
| Преобразователь постоянного напряжения | 1981 |
|
SU1056390A1 |
Изобретение относится к измерительной технике и может быть использовано для сигнализации положения движущихся объектов в устройствах автоматики и телемеханики. С целью повышения помехоустойчивости в сигнализатор, содержащий датчик 1, компаратор 19, триггеры 12, 20, введены выпрямители 16, 17, сумматор 18, пороговый блок 11, которые обеспечивают формирование истинного выходного сигнала элемента И 14 независимо от помехи, сигнал которой формирует на входе сумматора 18 слагаемые противоположного знака.2 ил.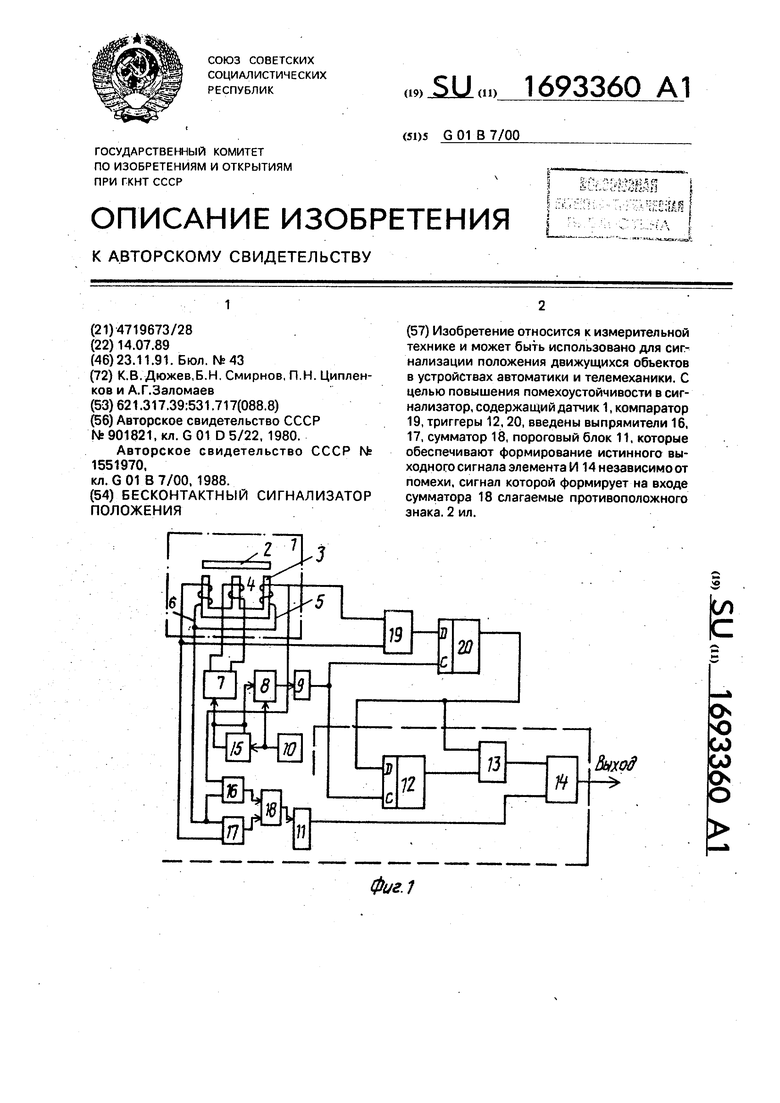
| Бесконтактный датчик положения | 1980 |
|
SU901821A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Бесконтактный сигнализатор положения | 1988 |
|
SU1551970A1 |
