Предлагаемое изобретение относится к лазерным полуактивным головкам самонаведения (ГСН), используемым для формирования сигналов управления артиллерийскими управляемыми снарядами и ракетами.
Известна полуактивная головка самонаведения, патент №2208217 от 10.07.2003 г., содержащая гирокоординатор, включающий приемник излучения в виде многоэлементного фотоприемного устройства (ФПУ) и обмотки управления магнитоэлектрического датчика момента, последовательно соединенные блок усилителей, сумматор, первый компаратор и селектор, схему сумморазностной обработки, последовательно соединенные дифференцирующее устройство, второй компаратор и устройство выборки и хранения, блок усилителей мощности, подключенный выходами, являющимися выходами головки самонаведения, к обмоткам управления магнитоэлектрического датчика момента, выходы элементов ФПУ соединены со входами блока усилителей, выход схемы сумморазностной обработки соединен со входом усилителя мощности, выход селектора соединен со вторым входом первого компаратора, второй вход устройства выборки и хранения соединен с выходом блока усилителей, выход устройства выборки и хранения соединен со входом схемы сумморазностной обработки, вход дифференцирующего устройства соединен с выходом сумматора, а второй вход второго компаратора соединен с выходом селектора.
При попадании отраженного от объекта импульса подсвета в поле зрения ГСН на выходах фотоприемного устройства формируются импульсы напряжения, пропорциональные энергии излучения, попавшей на каждую из четырех чувствительных площадок ФПУ. Импульсы с выхода фотоприемного устройства после усиления в блоке усилителей поступают на вход четырехканального устройства выборки и хранения и на вход сумматора, где суммируются по амплитуде и поступают на вход первого компаратора, формирующего нормированный по амплитуде импульс, поступающий на вход селектора. При попадании на вход селектора подряд 3-5 импульсов на заранее выбранной частоте подсвета на выходе селектора формируется стробирующий импульс, разрешающий формирование сигналов первым и вторым компараторами, а следовательно, формирование на выходе устройства выборки-хранения напряжений, пропорциональных входным импульсам. Схема сумморазностной обработки вырабатывает сигнал рассогласования, поступающий через усилители мощности на обмотки управления магнитоэлектрического датчика момента гирокоординатора, обеспечивающего удержание пятна рассеяния от цели в центре ФПУ.
Недостатком описываемой ГСН является ее недостаточная точность формирования сигнала управления при постановке искусственных помех, так как любой оптический сигнал, превышающий уровень порога в стробируемом интервале, вносит искажения в команду управления снарядом, а следовательно, может привести к увеличению промаха.
Задачей предлагаемого изобретения является повышение точности измерения угловой скорости линии визирования цели и формируемых из нее сигналов управления ракетой или снарядом в условиях помех. Указанная задача достигается тем, что в лазерную полуактивную головку самонаведения, содержащую гирокоординатор, включающий многоэлементный приемник излучения и обмотки управления магнитоэлектрического датчика момента, последовательно соединенные многоканальный усилитель, первый сумматор, первый компаратор, селектор импульсов и второй компаратор, последовательно соединенные схему сумморазностной обработки и блок усилителей мощности, а также первое устройство выборки-хранения и дифференцирующее устройство, причем выходы чувствительных элементов приемника излучения соединены с входами многоканального усилителя, выход которого соединен с входом первого устройства выборки-хранения, первый и второй выходы блока усилителей мощности, являющиеся выходами головки самонаведения, соединены с одноименными входами обмоток управления магнитоэлектрического датчика момента, выход селектора соединен со вторым входом первого компаратора, вход дифференцирующего устройства соединен с выходом первого сумматора, а выход - со вторым входом второго компаратора, третьи входы первого и второго компараторов служат для подачи опорного напряжения, дополнительно введены последовательно соединенные первый триггер, первая схема И, второе устройство выборки-хранения, второй сумматор, третий компаратор, второй триггер, коммутатор сигналов, третий сумматор, фильтр и четвертый компаратор, а также вторая схема И и четвертый сумматор, причем первый вход второй схемы И соединен с вторым выходом первого триггера, вторые входы первой и второй схем И и первого триггера соединены с выходом второго компаратора, выход второй схемы И соединен с вторым входом первого устройства выборки-хранения, выход которого соединен с входом четвертого сумматора и вторым входом коммутатора сигналов, первый вход первого триггера соединен с выходом селектора, первый выход фильтра соединен с первым входом третьего компаратора, второй выход фильтра соединен с вторыми входами третьего и четвертого компараторов, второй вход второго триггера соединен со выходом четвертого компаратора, второй вход второго устройства выборки-хранения соединен с первым входом первого устройства выборки-хранения, выход коммутатора сигналов соединен с входом схемы сумморазностной обработки, а его третий вход - с выходом второго устройства выборки-хранения, выход четвертого сумматора соединен с третьим входом четвертого компаратора.
Предлагаемое изобретение пояснено графическим материалом. На фиг. приведена структурная схема, где:
1 - многоэлементное, например, квадрантное фотоприемное устройство (ФПУ);
2 - многоканальный усилитель, например, четырехканальный усилитель (БУ);
3, 13, 18, 20 - сумматоры (СМ1, CM4, CM2, СМ3);
4, 7, 14, 19 - компараторы (КМП1, КМП2, КМП4, КМП3);
5 - селектор (СЕЛ);
6 - дифференцирующее устройство (ДИФФ);
8, 22 - триггеры (T1, T2);
9, 10 - схемы И (И2, И1);
11, 12 - устройства выборки-хранения (УВХ1, УВХ2);
15 - фильтр (Ф);
16 - схема сумморазностной обработки (СРО);
17 - коммутатор сигналов (КС);
21 - блок усилителей мощности (УМ);
23 - обмотки управления магнитоэлектрического датчика момента (ОУ).
Работает головка самонаведения следующим образом. При попадании отраженных от цели импульсов подсвета в поле зрения ГСН, на выходах многоэлементного фотоприемного устройства 1 формируются импульсы напряжения, пропорциональные энергии излучения, попавшей на каждый чувствительный элемент. Импульсы с выхода фотоприемного устройства 1 после усиления в блоке усилителей 2 поступают на вход сумматора 3, где суммируются по амплитуде и поступают на вход первого компаратора 4, формирующего при превышении установленного порога нормированный по амплитуде импульс, поступающий на вход селектора 5. Для обеспечения помехозащищенности ГСН период импульсов подсвета назначается заранее и поддерживается с высокой точностью. При приеме первого импульса подсвета селектор 5 начинает формировать последовательность стробирующих импульсов с заданным периодом повторения, равным периоду повторения импульсов подсвета. Эти импульсы стробируют первый компаратор 4, разрешая поступление на вход селектора 5 только импульсов с периодом повторения, равным периоду импульсов подсвета. При попадании на вход селектора подряд 3-5 таких импульсов он переходит в режим слежения, на выходе селектора 5 формируются стробирующие импульсы, разрешающие дальнейшее формирование сигналов первым 4 и вторым 7 компараторами. Для осуществления процесса слежения за целью формируется сигнал управления ГСН, пропорциональный углу рассогласования между осью оптической системы и направлением на цель. Для этого импульсы с выхода блока усилителей 2 поступают на входы устройств выборки-хранения (УВХ) 11, 12, осуществляющих запоминание их амплитуды. Для правильной работы УВХ необходимо, чтобы спад управляющего импульса, переводящего его в режим хранения, совпадал с вершиной входного импульса, что достигается включением между первым сумматором 3 и вторым компаратором 7 дифференцирующего блока 6. При этом на выходе второго компаратора 7 во время стробирующего интервала формируется импульс выборки, фронт которого совпадает с началом фронта входного импульса и спадом, совпадающим с вершиной импульса. При отсутствии помех в поле зрения ГСН запоминание амплитуд импульсов производится только первым УВХ 11. Триггер 22 из-за отсутствия условий для появления логической 1 на установочном входе 1 находится в исходном состоянии, разрешая прохождение сигнала с выхода первого УВХ 11 через коммутатор сигналов 17 на вход схемы сумморазностной обработки 16, формирующей выходные сигналы по соотношениям:
Х=(a+в-с-d)/(a+в+c+d);
Y=(a-в-c+d)/(a+в+c+d),
где X, Y - сигнал, пропорциональный смещению пятна излучения относительно центра ФПУ по соответствующей оси координат,
a, в, c, d - уровни напряжения с соответствующего выхода ФПУ.
Эти сигналы поступают через усилитель мощности 21 в соответствующие обмотки управления координатора 23, осуществляя прецессию ротора гироскопа в сторону уменьшения угла рассогласования между осью оптической системы и направлением на цель. Сигналы на выходах усилителя мощности 21, являющихся выходами ГСН, используются для управления ракетой или снарядом.
Сигнал с выхода первого УВХ 11 через четвертый сумматор 13 поступает также на вход четвертого компаратора 14, который, как и третий компаратор 19, является двухпороговым - логическая единица формируется на его выходе в случае, если уровень напряжения, поступающего с четвертого сумматора 13, находится в интервале между нижним и верхним значениями пороговых напряжений, сформированных на входах 1 и 2. Пороговые напряжения формируются фильтром 15 по соотношениям:
Uпор1=Uф[1-K(t)];
Uпop2=Uф[1+K(t)],
где Uпор1, Uпор2 - нижнее и верхнее значение порогового напряжения,
Uф - фильтрованное значение уровня входного сигнала, определяемое по предыдущим его значениям,
K(t) - коэффициент, определяемый допустимым изменением величины входного сигнал из-за изменения дальности до цели и флюктуациями входного сигнала, являющийся функцией времени самонаведения. При этом величина K(t) на значительном удалении от цели определяется флюктуацией входного сигнала из-за изменения пропускания спектрального фильтра при различных углах визирования цели и изменения пропускания атмосферы.
Наличие логической единицы на выходе четвертого компаратора 14 свидетельствует о том, что первый принятый входной импульс соответствует по энергетике предшествующим импульсам, т.е. является полезным. В отсутствии помехи, т.е. второго импульса в стробе, этот импульс подтверждает исходное состояние триггера 22. При появлении в поле зрения ГСН помехового оптического сигнала в стробируемом селектором 5 интервале появляются два импульса. Амплитуда первого из них запоминается первым УВХ 11. По спаду импульса с выхода второго компаратора 7 триггер 8 устанавливается в состояние «1», подключая второй компаратор 7 к управляющему входу 1 второго УВХ 12. При появлении второго импульса в стробируемом интервале второе УВХ 12 осуществляет запоминание его амплитуды. Запомненные напряжения обоих УВХ 11, 12 через четвертый и второй сумматоры 13, 18 поступают на входы двухпороговых компараторов 14 и 19 соответственно. При появлении логической 1 на выходе третьего компаратора 19, означающей, что второй импульс является полезным, триггер 22 устанавливается в состояние логической 1, подключая выход второго УВХ 12 к входу схемы сумморазностной обработки 16 через коммутатор сигналов 17. В противном случае к входу сумморазностной обработки 16 подключается выход первого УВХ 11. Выбранный сигнал определяет угол рассогласования между осью оптической системы и направлением на цель, а через третий сумматор 20 поступает на вход фильтра 15 для последующего усреднения.
Помеха может привести к изменению точности слежения в случае, если она действует во время формирования стробирующего интервала. При этом в стробе появляется второй (помеховый) импульс. Для селекции полезного (своего) импульса от помехового (чужого) в схему полуактивной ГСН введен контроль величины энергии текущих импульсов относительно заведомо своих, принятых на начальном этапе подсвета, когда помеха еще не может быть поставлена вследствие неопределенности характеристик подсвета. При этом в разряд отсекаемых попадают импульсы как естественных помех, так и искусственно поставленных, так как воспроизвести ложный импульс подсвета, создающий облученность входного зрачка, равную облученности от своего импульса, технически невозможно из-за отсутствия данных по величинам коэффициентов отражения и ослабления излучения атмосферой.
ГСН выполнена с применением стандартных микросхем. Цифровая часть выполнена на микросхемах серии 533. Исходное состояние триггеров обеспечивается, например, импульсом сброса, формируемым по положительному фронту питания цифровых микросхем. Для реализации входных усилителей и устройств выборки-хранения используются микросхемы серии 1486, первый и второй компараторы серии 521СА1. Двухпороговые компараторы третий и четвертый - типа 521СА2. Схема включения в книге Алексеенко и др. Применение прецизионных аналоговых микросхем. - М.: Радио и связь, 1985, стр.160, 161. Остальные аналоговые блоки выполнены на операционных усилителях общего применения 140УД6, 544УД2, фотоприемное устройство - типа ФУЛ-113.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНАЯ ПОЛУАКТИВНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2010 |
|
RU2439477C1 |
| ЛАЗЕРНАЯ ПОЛУАКТИВНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2011 |
|
RU2476815C1 |
| ОПТИЧЕСКАЯ ПОЛЯРИЗАЦИОННАЯ ГОЛОВКА САМОНАВЕДЕНИЯ С ОДНОЭЛЕМЕНТНЫМ ИНФРАКРАСНЫМ ПРИЕМНИКОМ ИЗЛУЧЕНИЯ | 2023 |
|
RU2825219C1 |
| ЛАЗЕРНАЯ ПОЛУАКТИВНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2001 |
|
RU2208217C2 |
| ГОЛОВКА САМОНАВЕДЕНИЯ | 2009 |
|
RU2415375C1 |
| ГИРОСКОПИЧЕСКОЕ СЛЕДЯЩЕЕ ЗА ЦЕЛЬЮ УСТРОЙСТВО САМОНАВОДЯЩЕЙСЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ РАКЕТЫ | 2009 |
|
RU2397435C1 |
| ПОЛУАКТИВНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2016 |
|
RU2645046C1 |
| СПОСОБ СЕЛЕКЦИИ ИМПУЛЬСОВ И СЕЛЕКТОР ИМПУЛЬСОВ ПОЛУАКТИВНОЙ ГОЛОВКИ САМОНАВЕДЕНИЯ | 2013 |
|
RU2530225C1 |
| ЭЛЕКТРОННЫЙ БЛОК ДВУХКАНАЛЬНОЙ ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКИ САМОНАВЕДЕНИЯ | 2011 |
|
RU2478909C2 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ ВРАЩАЮЩИМСЯ ПО УГЛУ КРЕНА САМОНАВОДЯЩИМСЯ СНАРЯДОМ | 2011 |
|
RU2482426C1 |
Предлагаемое изобретение относится к головкам самонаведения и может быть использовано для формирования сигналов управления артиллерийскими снарядами и управляемыми ракетами. Лазерная полуактивная головка самонаведения содержит гирокоординатор, включающий многоэлементный приемник излучения и обмотки управления магнитоэлектрического датчика момента, многоканальный усилитель, четыре сумматора, четыре компаратора, селектор импульсов, схему сумморазностной обработки, блок усилителей мощности, два устройства выборки-хранения, дифференцирующее устройство, два триггера, две схемы И, коммутатор сигналов и фильтр с соответствующими связями между указанными элементами. Технический результат заключается в повышении точности наведения в условиях помех. 1 ил.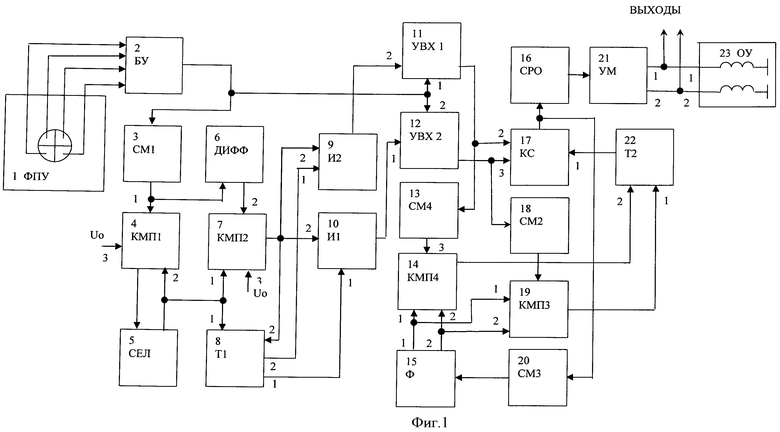
Лазерная полуактивная головка самонаведения, содержащая гирокоординатор, включающий многоэлементный приемник излучения и обмотки управления магнитоэлектрического датчика момента, последовательно соединенные многоканальный усилитель, первый сумматор, первый компаратор, селектор импульсов и второй компаратор, последовательно соединенные схему суммо-разностной обработки и блок усилителей мощности, а также первое устройство выборки-хранения и дифференцирующее устройство, причем выходы чувствительных элементов приемника излучения соединены с входами многоканального усилителя, выход которого соединен с первым входом первого устройства выборки-хранения, первый и второй выходы блока усилителей мощности, являющиеся выходами головки самонаведения, соединены с одноименными входами обмоток управления магнитоэлектрического датчика момента, выход селектора соединен со вторым входом первого компаратора, вход дифференцирующего устройства соединен с выходом первого сумматора, а выход - со вторым входом второго компаратора, третьи входы первого и второго компараторов служат для подачи опорного напряжения, отличающаяся тем, что в нее дополнительно введены последовательно соединенные первый триггер, первая схема И, второе устройство выборки-хранения, второй сумматор, третий компаратор, второй триггер, коммутатор сигналов, третий сумматор, фильтр и четвертый компаратор, а также вторая схема И и четвертый сумматор, причем первый вход второй схемы И соединен с вторым выходом первого триггера, вторые входы первой и второй схем И и первого триггера соединены с выходом второго компаратора, выход второй схемы И соединен с вторым входом первого устройства выборки-хранения, выход которого соединен с входом четвертого сумматора и вторым входом коммутатора сигналов, первый вход первого триггера соединен с выходом селектора, первый выход фильтра соединен с первым входом третьего компаратора, второй выход фильтра соединен с вторыми входами третьего и четвертого компараторов, второй вход второго триггера соединен с выходом четвертого компаратора, второй вход второго устройства выборки-хранения соединен с первым входом первого устройства выборки-хранения, выход коммутатора сигналов соединен с входом схемы суммо-разностной обработки, а его третий вход - с выходом второго устройства выборки-хранения, выход четвертого сумматора соединен с третьим входом четвертого компаратора.
| ЛАЗЕРНАЯ ПОЛУАКТИВНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2001 |
|
RU2208217C2 |
| ГОЛОВКА САМОНАВЕДЕНИЯ | 2009 |
|
RU2415375C1 |
| US 7659494 B2, 09.02.2010 | |||
| КИПЯТИЛЬНИК-СТЕРИЛИЗАТОР | 1925 |
|
SU3996A1 |
| US 7834300 B2, 16.11.2010. | |||

