ОБЛАСТЬ ТЕХНИКИ
Предлагаемое изобретение относится к головкам самонаведения и может быть использовано для формирования сигналов управления артиллерийскими снарядами и управляемыми ракетами.
УРОВЕНЬ ТЕХНИКИ
Известна пассивная инфракрасная головка самонаведения вращающейся ракеты (патент RU 2197709 на изобретение заявка: 2001109141/02 МПК F42B 15/01(2000.01) опубликован: 27.01.2003 Бюл. №3. Головка самонаведения содержит объектив, матрицу, электронный коммутатор, аналого-цифровой преобразователь АЦП, преобразователь координат элементов матрицы из полярной в декартову систему координат, оперативное запоминающее устройство (ОЗУ), селектор цели, усилитель, датчики моментов каналов курса и тангажа соответственно, корректируемый гироскоп, переключатель элементов матрицы, датчик угла крена ракеты, корпус ракеты, вращающийся ротор гироскопа, внутренняя рамка карданного подвеса, аппаратура управления ракетой.
Пассивная инфракрасная головка самонаведения работает следующим образом. Обзор фоноцелевой обстановки (ФЦО) в поле зрения объектива осуществляется посредством радиально-кругового сканирования матрицы, высокочувствительной в ИК области спектра. Такое сканирование обеспечивается за счет установки объектива и матрицы на внутренней рамке карданного подвеса корректируемого гироскопа, что обеспечивает передачу вращения ракеты по крену на матрицу. Продольный размер матрицы равен диаметру поля зрения объектива в фокальной плоскости изображения.
Сигналы теплового излучения цели и фона с каждого элемента матрицы последовательно (с первого номера до последнего) с помощью коммутатора передаются в аналого-цифровой преобразователь. Сцена изображения ФЦО представляется в полярной системе координат. Последовательность и необходимая частота съема информации с элементов матрицы в АЦП обеспечивается через коммутатор по сигналам с переключателя элементов матрицы, поступающим на второй вход коммутатора. Одновременно сигнал с переключателя поступает в преобразователь координат (положения) элементов матрицы из полярной в декартову систему координат. При этом производится преобразование координат элемента того же номера, с которого ведется съем информации. Переключатель элементов матрицы может быть выполнен, например, в виде задающего генератора и счетчика.
Преобразование координат каждого элемента матрицы из полярной в декартову (земную) систему координат для управления ракетой по курсу и тангажу осуществляется в преобразователе по известным формулам. Информация с каждого элемента матрицы после преобразования в АЦП в цифровой форме поступает на первый вход ОЗУ, на второй вход которого поступают сигналы о координатах этого же элемента в декартовой системе координат. В ОЗУ происходит запись информации о ФЦО с каждого элемента в прямоугольную матрицу, в которой координаты каждого элемента соответствуют декартовой системе координат. Обновление информации в ОЗУ происходит через каждые пол-оборота ракеты по крену.
Сцена изображения ФЦО с ОЗУ в декартовой системе координат передается в селектор цели.
В селекторе цели по определенным алгоритмам осуществляется захват и сопровождение цели по характерным признакам теплового излучения цели и фона и происходит сравнение этих признаков с заранее введенными признаками цели до пуска ракеты. С выхода селектора цели сигналы, пропорциональные угловому рассогласованию цели по курсу Uy и тангажу Uz относительно оптической оси объектива, после усилителя поступают соответственно на датчики моментов. Датчики создают коррекционные моменты, которые вызывают вынужденную прецессию гироскопа (внутренней рамки), что обеспечивает совмещение оптической оси объектива и центра матрицы с направлением на цель. Одновременно сигналы рассогласования поступают в аппаратуру управления ракетой, в соответствии с которыми она наводится на цель. Корректируемый гироскоп обеспечивает также стабилизацию матрицы при колебаниях ракеты по углам атаки и скольжения. Разгон ротора гироскопа до старта осуществляется, например, пружинным движителем. Вероятность выделения цели на фоне помех и захвата ее на максимальной дальности наведения определяет поле зрения головки самонаведения (ГСН). Снаряды с ГСН и большим полем зрения имеют более высокую вероятность корректного захвата и, следовательно, поражения цели. Рассмотрим оценку параметров ГСН на примере управляемой ракеты (УР) «Javelin». Противотанковый ракетный комплекс (ПТРК) «Javelin» предназначен для поражения бронетехники на дальности до 2500 м. Оператор осуществляет захват цели до пуска ракеты с помощью тепловизионной головки самонаведения (ТпГСН), работающей в диапазоне длин волн 8 (12 мкм, далее наведение на цель осуществляется автоматически. В управляемой ракете (УР) «Javelin» используется пассивная ТпГСН с матричным приемником излучения (МПИ) формата 64x64 элемента, с размером пикселя 61 мкм, на основе соединения кадмий-ртуть-теллур (КРТ) производства фирмы «Raytheon». Это обеспечивает всесуточность работы комплекса.
[Шилин А.А. Обзор пассивных оптических ГСН для поражения наземных тактических целей // Известия ТулГУ. Технические науки. 2014. Вып. 7]
При размере одной из сторон матричного приемника излучения А=64*61=3904 мкм=3,9 мм., и поля зрения ГСН составляющего ω=1°, фокусное расстояние оптической системы составит:

Большое фокусное расстояние оптической системы затрудняет реализацию ГСН при малых продольных размерах боеприпаса (беспилотного летательного аппарата), что является одним из недостатков ГСН с МПИ. Другим недостатком данного аналога являются трудности обнаружения (фиксации) слабых сигналов с приемника излучения при малом отношении сигнала к шуму приемника излучения.
Следующим аналогом является лазерная полуактивная головка самонаведения (патент RU №2473866 на изобретение заявка: 2011133762/28 МПК F42B 15/01 (2006.01) опубликован: 27.01.2013. Бюл. №3).
Лазерная полуактивная головка самонаведения содержит гирокоординатор, включающий квадрантный приемник излучения и обмотки управления магнитоэлектрического датчика момента, многоканальный усилитель, четыре сумматора, четыре компаратора, селектор импульсов, схему сумморазностной обработки, блок усилителей мощности, два устройства выборки-хранения, дифференцирующее устройство, два триггера, две схемы И, коммутатор сигналов и фильтр с соответствующими связями между указанными элементами.
Работает головка самонаведения следующим образом. При попадании отраженных от цели импульсов подсвета в поле зрения ГСН, на выходах многоэлементного фотоприемного устройства формируются импульсы напряжения, пропорциональные энергии излучения, попавшей на каждый чувствительный элемент. Импульсы с выхода фотоприемного устройства после усиления в блоке усилителей поступают на вход схемы обработки сигналов, формирующей выходные сигналы по соотношениям:
X=(a+в-c-d)/(a+в+c+d);
Y=(a-в-c+d)/(a+в+c+d),
где X, Y - сигнал, пропорциональный смещению пятна излучения относительно центра ФПУ по соответствующей оси координат,
а, в, с, d - уровни напряжения с соответствующего выхода ФПУ.
Эти сигналы поступают в усилитель мощности и используются для управления ракетой или снарядом.
Недостатком приведенного аналога, является сложность обработки сигналов от пикселей фоточувствительной матрицы, при малом отношении сигнала к шуму элементов фоточувствительной матрицы. Прототипом предлагаемого устройства является лазерная полуактивная головка самонаведения (патент RU №2476815 на изобретение заявка: 2011142552/28 МПК F42B 15/01 (2006.01) опубликован: 27.02.2013. Бюл. №6).
Лазерная полуактивная головка самонаведения содержит гирокоординатор, включающий многоэлементный приемник излучения и гироскоп с обмотками управления системы коррекции и блок обработки сигналов с многоэлементного приемника. Блок обработки сигналов включает в себя: два многоканальных усилителя, два блока компараторов, блок пиковых детекторов, две схемы сумморазностной обработки, блок усилителей мощности, блок триггеров, схему ИЛИ, селектор, генератор импульсов, таймер, два регистра, ключ, два блока счетчиков, две схемы И-ИЛИ, схему запрета, триггер и схему И с соответствующими связями.
Работает головка самонаведения (ГСН) следующим образом. При подаче питания на ГСН и отсутствии импульсов подсвета цели, обеспечиваемых задержкой времени включения прибора подсвета относительно времени подключения батарей питания, на выходах первого и второго многоканальных усилителей, формируются выходные сигналы, определяемые уровнем шумов соответствующих элементов ФПУ устройства. При заданном критическом соотношении СКО шума σш от величины порога соответствующего компаратора U0, когда еще возможна уверенная селекция импульсов подсвета, определяется соотношениями:

где σш - с. к.о шума;
Т - величина измерительного интервала (0,2-0,5 с);
U0 - величина порога соответствующего компаратора.
Количество импульсов, накопленное соответствующим счетчиком к концу измерительного интервала, определяется соотношением:
где f0 - тактовая частота генератора.
По окончании измерительного интервала в памяти хранятся номера каналов, соотношение порог/шум для которых ниже критического. При включении прибора подсвета и попадании отраженного от объекта импульса подсвета в поле зрения ГСН, на выходах ФПУ 1 формируются импульсы напряжения, пропорциональные энергии излучения, попавшей на каждую из чувствительных площадок ФПУ.
Токи, формируемые в обмотках управления блока обработки сигналов, рассчитываются по соотношениям:

где а, в, с, d - амплитуды импульсов с соответствующего центрального канала ФПУ;
Imax - величина тока при максимальной скорости автосопровождения.
При этом ротор гироскопа прецессирует в сторону уменьшения угла рассогласования между оптической осью ГСН и направлением на цель. Сигналы на выходах ГСН, используются для формирования сигналов управления снарядом или ракетой.
При наличии шумящего канала сигнал с его выхода блокируется и не запоминается пиковым детектором.
Наиболее общим случаем является работа селектора и формирование сигналов управления по сигналам с периферийных площадок. При этом первые импульсы лазерного излучения из-за рассеивания и ошибок наведения снаряда или ракеты попадают на одну из периферийных площадок, определяя тем самым состояние сигналов с блока обработки, которые поступают на обмотки управления системы коррекции для создания корректирующего момента гироскопа. Токи, формируемые в обмотках управления системы коррекции, определяются согласно соотношениям:
где А, В, С, D - наличие сигнала на соответствующей периферийной площадке фотоприемного устройства;
 - знаки логического умножения, сложения и инверсии;
- знаки логического умножения, сложения и инверсии;
I0 - фиксированное значение тока.
При вышеуказанных управляющих воздействиях гироскоп быстро прецессирует, перемещая пятно рассеяния на центральные площадки. При наличии шумящего периферийного канала направление прецессии сохраняется, а время перехода пятна рассеивания на центральные площадки увеличивается примерно на 20% при сохранении динамических характеристик ГСН.
Недостатком прототипа является малое поле зрения системы самонаведения на цель, а также трудности обнаружения (фиксации) слабых сигналов с приемника излучения при малом отношении сигнала к шуму фотоприемника. Технической задачей изобретения является упрощение устройства и увеличение поля зрения и точности наведения управляемого боеприпаса на цель, расширение спектрального диапазона анализируемых излучений от цели, а также возможность выделения сигнала с приемника излучения при его значительной зашумленности.
Сущность предлагаемого изобретения основана на том, что на оптической оси поляризационной головки самонаведения последовательно по ходу излучения от цели, размещены деполяризатор плоскости поляризации излучения от цели, квадрантный поляризатор, ротатор поляризации с модулем опорных сигналов поворота плоскости поляризации и одноэлементный приемник излучения от цели, при этом квадрантный поляризатор выполнен в виде совмещенных в одной плоскости четырех секторов, плоскости поляризации каждого из которых, ориентированы под углами 0°, 45°, 90°, 135°, к координатной оси Y системы самонаведения, а квадрантный поляризатор расположен в фокальной плоскости объектива, оптическая ось которого проходит через центр квадрантного поляризатора, выход одноэлементного приемника излучения соединен с сигнальными входами двух синхронных детекторов, причем входа опорных напряжений первого и второго синхронных детекторов, соединены с модулем опорных сигналов поворота плоскости поляризации ротатора формирующего синфазную cos2ωt и квадратурную sin2ωt составляющие, при этом выходные сигналы синхронных детекторов соединены через низкочастотные фильтры с системой наведения боеприпаса на цель по двум ортогональным координатам X и Y.
Новыми признаками, обладающими существенными отличиями оптической поляризационной головки самонаведения, с одноэлементным инфракрасным приемником излучения, является следующая совокупность действий:
1. В фокальной плоскости объектива установлен квадрантный поляризатор, состоящий из четырех секторов, совмещенных в одной плоскости, а плоскости поляризации секторов ориентированы под углами 0°, 45°, 90°, 135°, к координатной оси Y, системы наведения;
2. Габариты квадрантного поляризатора позволят обеспечить большой угол обзора головки самонаведения;
3. Прошедшее через поляризатор излучение принимается одним приемником излучения, который может работать в широком диапазоне спектра;
4. Синхронное детектирование сигнала с одного приемника излучения позволяет формировать управляющие воздействия системы наведения боеприпаса на цель по двум ортогональным координатам X и Y, при шуме приемника много большего чем сигнал;
5. Использование проволочных поляризаторов позволит работать в широком диапазоне спектра от 1 мкм. до 30 мкм.
Заявляемое устройство являются результатом научно исследовательской и экспериментальной работы.
Краткое описание фигур чертежа.
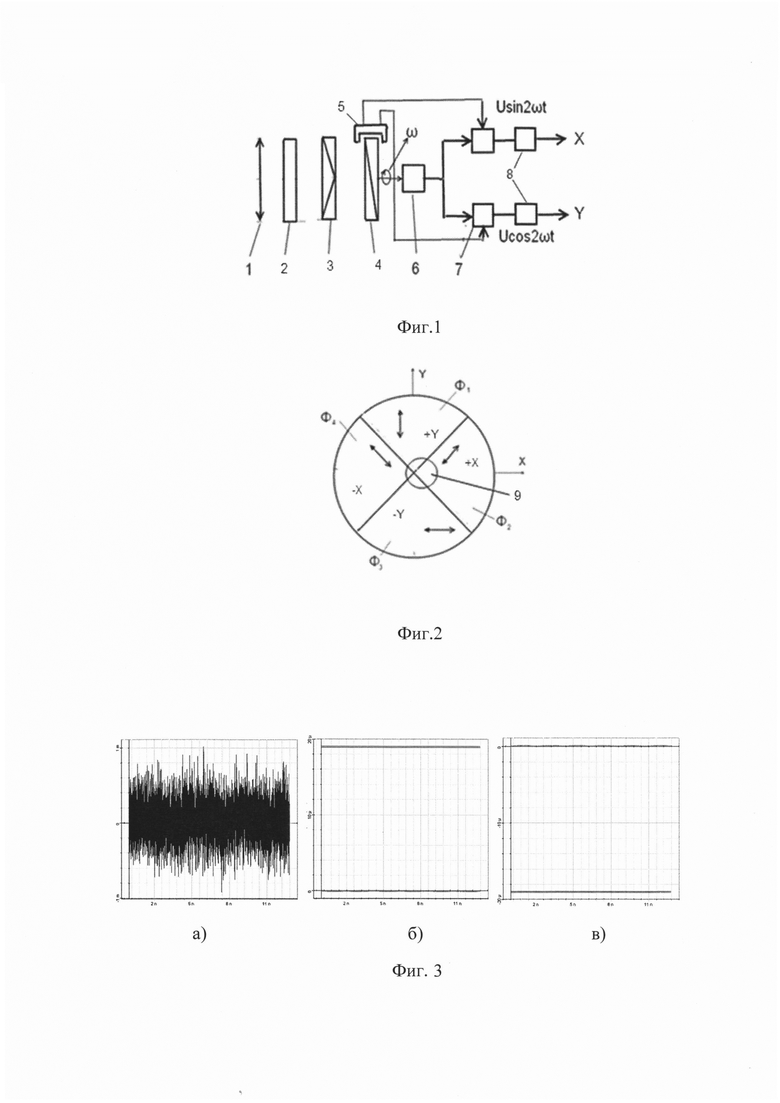
На фиг. 1 приведена функциональная схема заявляемой оптической поляризационной головки самонаведения, с одноэлементным инфракрасным приемником излучения.
На фиг. 2 приведен рисунок квадрантного поляризатора, с изображением цели 9.
На фиг. 3 приведены осциллограммы шума и сигнала с приемника излучения, а также сигнала после фильтра нижних частот.
Оптическая поляризационная головка самонаведения, с одноэлементным инфракрасным приемником излучения содержит (фиг. 1): объектив 1, деполяризатор плоскости поляризации излучения от цели 2, квадрантный поляризатор 3, ротатор поляризации 4, модуль опорных напряжений ротатора поляризации 5, одноэлементный приемник излучения 6, два синхронных детектора 7, два фильтра нижних частот 8. Оптическая поляризационная головка самонаведения, с одноэлементным инфракрасным приемником излучения, работает следующим образом. Излучение от цели, при помощи объектива 1, направляется через деполяризатор плоскости поляризации излучения от цели 2, на квадрантный поляризатор 3. Излучение от цели может быть частично поляризованным, что приведет к систематической погрешности наведения. Чтобы исключить систематическую погрешность наведения, излучение от цели деполяризуют. Прошедшее квадрантный поляризатор 3 излучение, через ротатор поляризации 4, направляют на одноэлементный приемник излучения 6. Поток излучения, прошедшего через ротатор поляризации 4, вращающийся с угловой скоростью ω, в соответствии с законом Малюса, изменяется по закону:

где Ф+Y, Ф-Y, Ф+Х, Ф-Х - потоки излучения, проходящие через сектора квадрантного поляризатора 3, плоскости поляризации которых, ориентированы под углами 0°, 45°, 90°, 135°, к координатной оси наведения Y, фиг.2. Как следует из соотношения (1), поток излучения, попадающий на приемник излучения 6, содержит постоянную и переменную составляющие. Информационной является переменная составляющая:

Принимая во внимание, что:

соотношение (2), перепишем в виде:

Переменная составляющая сигнала на выходе приемника излучения 7, будет:

где S- чувствительность приемника излучения 6.
Как следует из соотношения (4), сигнал с приемника излучения 6, содержит синфазную и квадратурную составляющие, которые выделяются двумя синхронными детекторами 7. Синфазная составляющая (Ф+Y - Ф-Y) cos2ωt несет информацию о смещении положения цели по координатной оси наведения Y, а квадратурная составляющая (Ф+Х - Ф-Х) sin2ωt о смещении положения цели по координатной оси наведения X. Индексы (+) и (-) показывают направление смещения потока излучения от цели по соответствующим осям, относительно центра секционного поляризатора. Поскольку частота сигнала точно равна опорной частоте, на выходах синхронного детектора будут составляющие с нулевой разностной частотой:
(Ф+Y - Ф-Y) - смещение положения цели по координатной оси наведения Y;
(Ф+Х - Ф-Х) - смещение положения цели по координатной оси наведения X.
Выход одноэлементного приемника излучения 6 соединен с сигнальными входами двух синхронных детекторов 7. Входы опорных напряжений синхронных детекторов 7, соединены с выходами модуля опорных напряжений ротатора поляризации 5, формирующих синфазную cos2ωt и квадратурную sin2ωt составляющие.
На выходах синхронных детекторов 7, будут присутствовать гармонические составляющие на суммарной и разностной частотах. Составляющая на суммарной частоте, блокируется фильтром нижних частот. Поскольку частота сигнала точно равна частоте опорного напряжения, модуля опорных напряжений ротатора поляризации 5, информационный сигнал будет иметь постоянную составляющую и на выход фильтра нижних частот 8, пройдет только эта постоянная составляющая.
Выходы синхронных детекторов 7, через фильтры нижних частот 8, поступают в систему наведения боеприпаса на цель по двум ортогональным координатам X и Y.
На фиг. 3 приведены осциллограммы:
а) сигнала и шума с выхода приемника излучения 6;
б) сигнала после синхронного детектирования и фильтра нижних частот 8, при положительном смещении изображения цели относительно центра квадрантного поляризатора + (Ф+Y - Ф-Y);
в) сигнала после синхронного детектирования и фильтра нижних частот 8, при отрицательном смещении изображения цели относительно центра квадрантного поляризатора - (Ф+Y - Ф-Y).
При этом шум приемника излучения в 10 раз превышает сигнал. Выходные сигналы управления с фильтров нижних частот 8, поступают в систему наведения боеприпаса на цель по двум ортогональным координатам Х и Y.
В предлагаемом решении, при диаметре квадрантного поляризатора 20 мм. и поля зрения ГСН ω=10°, фокусное расстояние оптической системы составит:

Таким образом, в предлагаемом решении, при увеличении поля зрения ГСН в 10 раз, фокусное расстояние оптической системы уменьшилось в два раза (по отношению к управляемой ракете (УР) «Javelin», где используется пассивная ТпГСН с матричным приемником излучения (МПИ) формата 64x64 элемента, с размером пикселя 61 мкм. и фокусном расстоянии оптической системы ƒ=224 мм.). При диаметрах квадрантного поляризатора 10 мм., или 5 мм. и поля зрения ГСН ω=10°, фокусное расстояние оптической системы составит ƒ=56,7 мм. или 28,3 мм., соответственно. Это позволит уменьшить массогабаритные параметры ГСН для их размещения на беспилотных летательных аппаратах и повысить вероятность поражения цели.
Заявляемая оптическая поляризационная головка самонаведения, с одноэлементным инфракрасным приемником излучения позволит обеспечить большой угол обзора головки самонаведения, формировать управляющие воздействия системы наведения боеприпаса на цель по двум ортогональным координатам X и Y, при шуме приемника излучения много большего чем сигнал, а также работать в широком диапазоне спектра видимого и ИК-излучения.
Для изготовления квадрантного поляризатора могут использоваться проволочные поляризаторы colorPol®, работающие в диапазоне излучений 2-30 мкм. и температур: от - 50°С до +400°С.
Ротатор поляризации может быть выполнен на основе бескорпусного электродвигателя JCM38*0,65, компании KUBO®, в полом роторе которого будет размещен проволочный анализатор. Двигатель типа JCM38*0,65 имеет: внешний диметр статора 38 мм., внутренний диаметр ротора 18 мм., длина статора 16,5 мм., длина ротора 8 мм., масса 64 г. Все остальные компоненты системы являются стандартными.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ УПРАВЛЕНИЯ БОЕПРИПАСОМ ОПТИЧЕСКОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ С ОДНОЭЛЕМЕНТНЫМ ИК-ПРИЕМНИКОМ | 2023 |
|
RU2822973C1 |
| ТЕПЛОВАЯ ГОЛОВКА САМОНАВЕДЕНИЯ РАКЕТЫ, НЕЧУВСТВИТЕЛЬНАЯ К ГЕНЕРАТОРАМ ИНФРАКРАСНЫХ ПУЛЬСИРУЮЩИХ ПОМЕХ | 2010 |
|
RU2419060C2 |
| ПАССИВНАЯ ИНФРАКРАСНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ | 2001 |
|
RU2197709C2 |
| ГИРОСКОПИЧЕСКОЕ СЛЕДЯЩЕЕ ЗА ЦЕЛЬЮ УСТРОЙСТВО САМОНАВОДЯЩЕЙСЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ РАКЕТЫ | 2009 |
|
RU2397435C1 |
| Комбинированная многоканальная головка самонаведения | 2017 |
|
RU2693028C2 |
| Способ оптико-электронного наведения и дистанционного подрыва управляемой ракеты и комплексированная система для его реализации | 2022 |
|
RU2791420C1 |
| СПОСОБ НАВЕДЕНИЯ ПРОТИВОКОРАБЕЛЬНОЙ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2771076C1 |
| СПОСОБ ВЫВОДА РАКЕТЫ В ЗОНУ ЗАХВАТА ЦЕЛИ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2013 |
|
RU2542691C1 |
| Способ вывода вращающейся по углу крена ракеты с гироскопом направления в зону захвата цели головкой самонаведения и система для его осуществления | 2017 |
|
RU2659622C1 |
| СПОСОБ ВЫВОДА ДАЛЬНОБОЙНОЙ РАКЕТЫ В ЗОНУ ЗАХВАТА ЦЕЛИ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И СИСТЕМА НАВЕДЕНИЯ ДАЛЬНОБОЙНОЙ РАКЕТЫ | 2015 |
|
RU2583347C1 |
Изобретение относится к области систем самонаведения и касается оптической поляризационной головки самонаведения. В головке последовательно размещены объектив, деполяризатор, квадрантный поляризатор, ротатор поляризации с модулем опорных сигналов и одноэлементный приемник излучения. Поляризатор выполнен в виде четырех секторов, плоскости поляризации которых ориентированы под углами 0°, 45°, 90°, 135° к оси Y головки самонаведения. Поляризатор расположен в фокальной плоскости объектива, оптическая ось которого проходит через центр поляризатора. Выход приемника излучения соединен с сигнальными входами двух синхронных детекторов. Входы опорных напряжений синхронных детекторов соединены с модулем опорных сигналов ротатора поляризации, формирующим синфазную cos 2ωt и квадратурную sin 2ωt составляющие. Выходные сигналы детекторов соединены через низкочастотные фильтры с управляющими сигналами системы наведения боеприпаса на цель. Технической результат заключается в упрощении устройства, увеличении поля зрения и точности наведения на цель, расширении спектрального диапазона анализируемых излучений, а также в обеспечении возможности выделения сигнала с приемника излучения при его значительной зашумленности. 3 ил.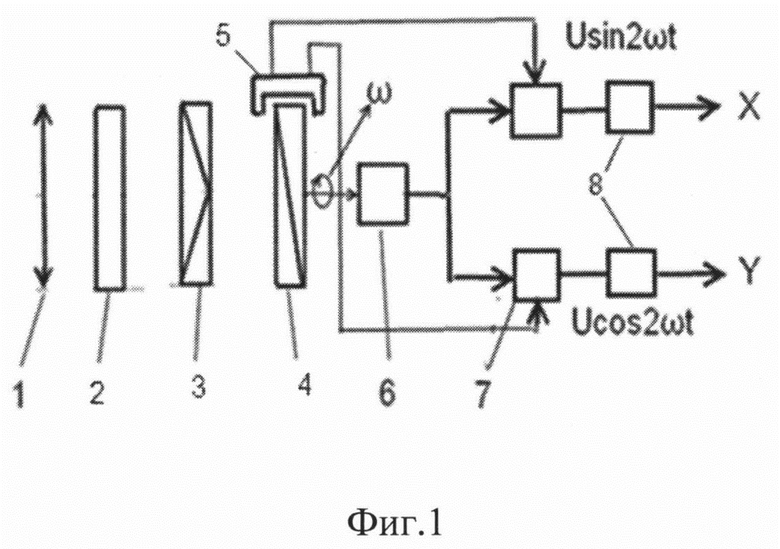
Оптическая поляризационная головка самонаведения с одноэлементным инфракрасным приемником излучения, содержащая оптико-электронное устройство и приемник излучения, отличающаяся тем, что на оптической оси поляризационной головки самонаведения последовательно по ходу излучения от цели размещены деполяризатор плоскости поляризации излучения от цели, квадрантный поляризатор, ротатор поляризации с модулем опорных сигналов поворота плоскости поляризации и одноэлементный приемник излучения от цели, при этом квадрантный поляризатор выполнен в виде совмещенных в одной плоскости четырех секторов, плоскости поляризации каждого из которых ориентированы под углами 0°, 45°, 90°, 135° к координатной оси Y системы самонаведения, а квадрантный поляризатор расположен в фокальной плоскости объектива, оптическая ось которого проходит через центр квадрантного поляризатора, выход одноэлементного приемника излучения соединен с сигнальными входами двух синхронных детекторов, причем входы опорных напряжений первого и второго синхронных детекторов соединены с модулем опорных напряжений ротатора поляризации, формирующим синфазную cos 2ωt и квадратурную sin 2ωt составляющие, при этом выходные сигналы синхронных детекторов соединены через низкочастотные фильтры с управляющими сигналами системы наведения боеприпаса на цель по двум ортогональным координатам X и Y.
| ЛАЗЕРНАЯ ПОЛУАКТИВНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2011 |
|
RU2476815C1 |
| ОПТИКО-ЭЛЕКТРОННЫЙ КООРДИНАТОР | 1995 |
|
RU2140659C1 |
| US 4967979 A1, 06.11.1990 | |||
| US 7183966 B1, 27.02.2007. | |||

