Область техники
Настоящее изобретение относится к силовому преобразователю с многоуровневым выходом напряжения, в частности к устройству для преобразования напряжения постоянного тока в напряжение переменного тока и наоборот, содержащему систему управления для управления преобразованием напряжения и содержащему, по меньшей мере, одну фазную цепь, в которой первый источник напряжения подключен последовательно между первой клеммой постоянного тока и первой клеммой переменного тока и в которой второй источник напряжения подключен последовательно между первой клеммой переменного тока и второй клеммой постоянного тока, причем каждый из источников напряжения содержит, по меньшей мере, первый и второй субмодули, соединенные последовательно, причем каждый субмодуль содержит, по меньшей мере, два электронных силовых переключателя, соединенных параллельно с, по меньшей мере, одним конденсатором.
Предшествующий уровень техники
Известные в технике многоуровневые преобразователи используются для снижения гармонических искажений в выходном сигнале преобразователей источников напряжения. Многоуровневый преобразователь - это преобразователь, где выходное напряжение или в случае многофазного преобразователя напряжения может находиться на нескольких дискретных уровнях.
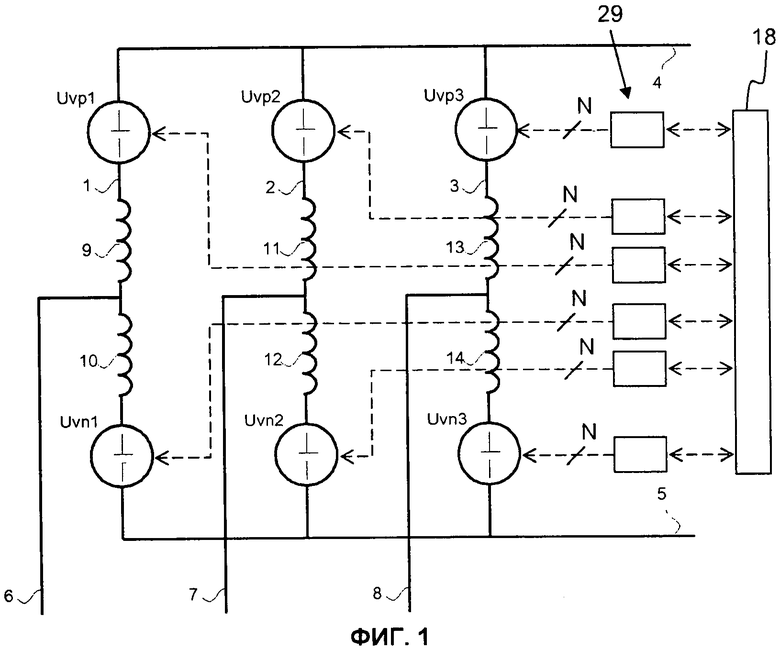
Из уровня техники известны различные системы и способы для управления преобразованием напряжения многоуровневого силового преобразователя. В DE 10103031, WO 2008/067784 и в докладе Marquardt и др.: “New Concept for High Voltage - Modular Multilevel Converter”, Power Electronics Specialists Conference (PESC), 2004, Аахен, Германия, раскрыта система управления для многоуровневого преобразователя, основная топология которого показана на фиг.1. Преобразователь представляет собой трехфазный преобразователь, имеющий три фазные цепи 1, 2 и 3. Каждая фазная цепь содержит два так называемых плеча, соединенных последовательно: положительное, верхнее плечо, подключенное к первой клемме 4 постоянного тока на положительном уровне напряжения, и отрицательное, нижнее плечо, подключенное ко второй клемме 5 постоянного тока на нулевом или отрицательном уровне напряжения. Каждое положительное плечо содержит последовательно соединенные верхний источник напряжения Uvpi и первый дроссель 9, 11 или 13, соответственно, и каждое отрицательное плечо содержит второй дроссель 10, 12 или 14, соответственно, и нижний источник напряжения Uvni, где i означает номер соответствующей фазной цепи. Средняя точка или точка соединения между первым и вторым дросселями каждой фазной цепи подключена к клемме 6, 7 или 8 переменного тока, соответственно. Все фазные цепи подключены параллельно друг другу и к двум клеммам 4 и 5 постоянного тока. Преобразование переменного тока в постоянный ток осуществляется путем надлежащего управления источниками напряжения Uvpi и Uvni фазных цепей с течением времени. В общем случае такой преобразователь может иметь любое количество P фазных цепей в зависимости от количества фаз, которое имеет напряжение переменного тока. Пример однофазного многоуровневого преобразователя можно найти в статье M. Glinka и R. Marquardt, “A new ac/ac multilevel converter family”, IEEE Transactions on Industrial Electronics, т. 52, № 3, июнь 2005 г., стр. 662-669.
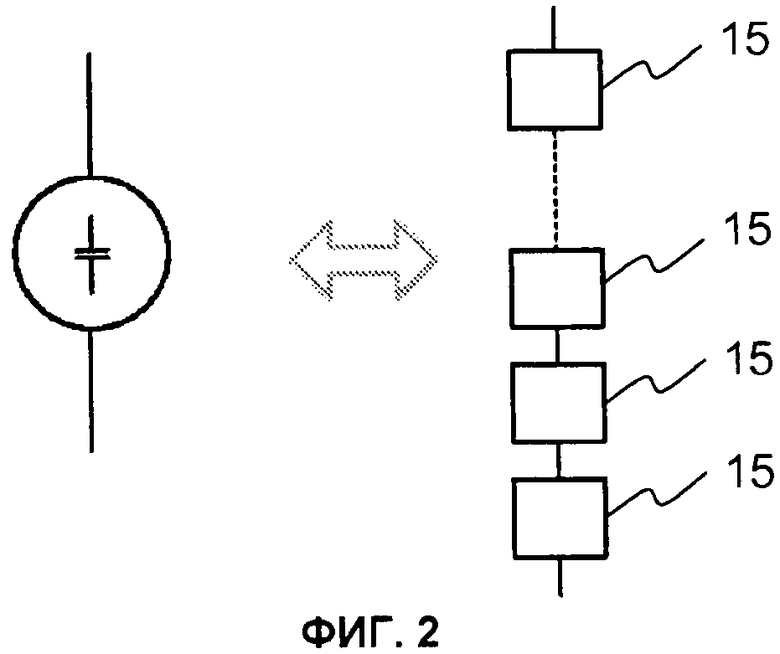
Общая схема источников напряжения Uvpi и Uvni, соответственно, каждого плеча, известная из вышеупомянутых источников информации, отвечающих уровню техники, представлена на фиг.2. Каждый источник напряжения выполнен в виде цепочки последовательно соединенных субмодулей 15, причем в одной цепочке содержится, по меньшей мере, два субмодуля 15. Суммарное количество цепочек соединенных субмодулей 15 на плечо ниже обозначено как N, где N больше 1, и может составлять несколько сотен.
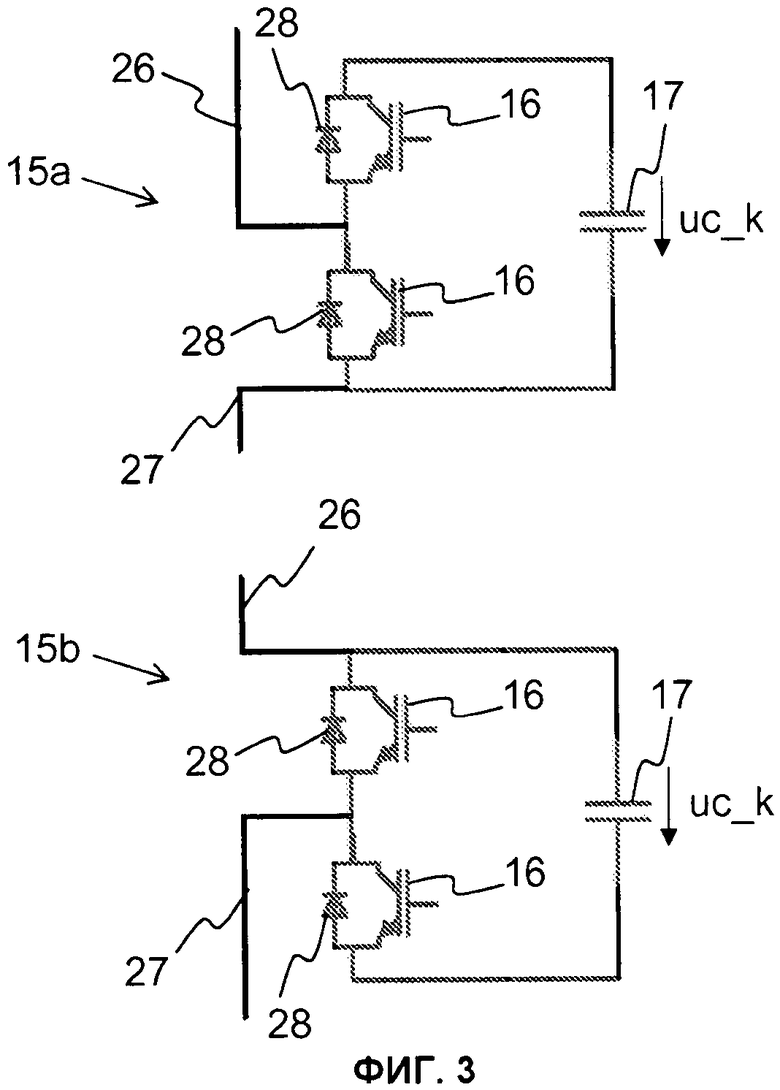
На фиг.3 показаны два разных варианта осуществления 15a и 15b субмодулей 15, известные из DE 10103031. В каждом источнике напряжения возможна любая комбинация субмодулей. Субмодули имеют вид коммутационных ячеек, каждая из которых содержит два последовательно соединенных полупроводниковых вентиля и большой конденсатор 17 постоянного тока, поддерживающий постоянное напряжение в целях накопления энергии. Каждый из двух вентилей снабжен безынерционным диодом 28, подключенным втречно-параллельно с электронным силовым переключателем 16 с возможностью управляемого открытия и закрытия, примером которого может быть транзистор, запираемый (GTO) тиристор или их последовательное и/или параллельное соединение. В зависимости от того какой из двух электронных силовых переключателей 16 открыт, соответствующий субмодуль 15 может находиться в одном из двух переключаемых состояний, при этом на выходные клеммы 26 и 27 подается нулевое напряжение в первом состоянии или мгновенное напряжение uc_k на конденсаторе во втором состоянии. Буква k обозначает номер субмодуля 15 в соответствующем плече фазной цепи, где 1≤k≤N. В результате два вентиля субмодуля 15 предназначены для подключения и отключения конденсатора 17 электрической цепи соответствующего плеча для обеспечения нужного преобразования между напряжениями переменного и постоянного тока, и также с возможностью регулировки среднего значения напряжения uc_k на конденсаторе 17.
Что касается управления известными многоуровневыми преобразователями, Glinka и др. предлагают осуществлять централизованное управление переключением электронных силовых переключателей для всех субмодулей конкретного плеча. Когда система управления определяет, что должно произойти событие переключения, для переключения выбирается субмодуль, в котором напряжение на конденсаторе максимально отклоняется от опорного напряжения при условии, что направление тока позволяет уменьшить отклонение. Это позволяет препятствовать отклонению напряжений на всех конденсаторах субмодулей от опорного напряжения.
В публикации WO 2008/067784 A1 раскрыта система управления для многоуровневого преобразователя согласно фиг.1, содержащая центральный блок управления 18 и плечевые блоки 29 управления, где количество плечевых блоков 29 управления равно суммарному количеству плеч преобразователя, т.е. 2·P=6. Центральный блок 18 управления управляет выходным током преобразователя путем определения опорных значений для каждого плечевого блока 29 управления в зависимости от разных измерений, например, тока и напряжения преобразователя. В соответствии с опорными значениями плеч плечевые блоки 29 управления осуществляют индивидуальные функции управления для переключения каждого из субмодулей 15 в соответствующем плече.
В статье Hirofumi Akagi и др. “Control and Performance of a Transformerless Cascade PWM STATCOM With Star Configuration”, IEEE Trans. on Industry Applications, т. 43, № 4, июль/август 2007, описан статический синхронный компенсатор (STATCOM), использующий трехфазный многоуровневый преобразователь с многокаскадными однофазными H-мостами в каждой фазе. Система управления STATCOM состоит из полностью цифровой схемы управления на основе одного DSP (цифровой сигнальный процессор) и трех FPGA (программируемая пользователем вентильная матрица). Три несущих сигнала сдвинуты по фазе на 2π/3 друг от друга для применения сдвинутых по фазе ШИМ к H-мостам каждой фазы. DSP регулярно посылает пару опорных напряжений на один из трех FPGA.
Краткое изложение существа изобретения
Задачей настоящего изобретения является создание силового преобразователя вышеописанного вида с упрощенной системой управления.
Эта задача решается посредством устройства по п. 1.
Вышеописанная система управления устройства для преобразования напряжения постоянного тока в напряжение переменного тока и наоборот содержит согласно изобретению центральный блок управления и, по меньшей мере, два подблока, причем центральный блок управления передает на каждый подблок опорное напряжение переменного тока и несущий сигнал переключения, и каждый подблок управляет переключением электронных силовых переключателей одного субмодуля согласно шаблону ШИМ таким образом, чтобы каждый раз, когда несущий сигнал переключения пересекает опорное напряжение переменного тока, то либо напряжение на конденсаторе, либо нулевое напряжение поступало бы на выходные клеммы соответствующего субмодуля.
Изобретение основано на понимании того факта, что известная система управления с центральным блоком управления и плечевыми блоками управления обладает тем недостатком, что каждый плечевой блок управления должен по отдельности управлять переключением всех его соответствующих субмодулей, т.е. для каждого субмодуля плечевой блок управления должен генерировать его собственные входные или опорные значения. Соответственно, для каждого субмодуля на плечевом блоке управления должны устанавливаться и выполняться индивидуальные функции управления, и при установке системы управления, требуется подключать каждый субмодуль к соответствующему интерфейсу на плечевом блоке управления.
В отличие от этого можно смоделировать систему управления на основании способа управления, как описано в патентной заявке PCT/EP2008/050120. Основной принцип этого способа управления состоит в осуществлении переключения субмодулей согласно широтно-импульсной модуляции (ШИМ) в распределенном режиме, а не в централизованном режиме, где один из двух сигналов, связанных с ШИМ, опорное напряжение переменного тока или несущий сигнал переключения распределен по времени.
Опорное напряжение переменного тока является опорным значением для каждого источника напряжения и, таким образом, для каждого плеча. Несущий сигнал переключения идентичен по форме для всех субмодулей каждого плеча. Центральный блок управления генерирует опорное напряжение переменного тока для каждого плеча, а также несущий сигнал переключения и передает их на подблоки управления или подблоки, причем каждый подблок связан с одним из субмодулей плеч. Подблоки сравнивают несущий сигнал переключения и опорное напряжение переменного тока и инициируют переключение и, таким образом, изменение состояния соответствующего субмодуля с первого состояния во второе состояние или наоборот, каждый раз, когда несущий сигнал переключения пересекает опорное напряжение переменного тока.
Необходимое распределение одного из двух сигналов, связанных с ШИМ, может осуществляться либо в центральном блоке управления, либо в каждом подблоке. Помимо возможной генерации индивидуальной задержки по времени, все функции генерации управления и переключения, осуществляемые подблоками, идентичны друг другу, поскольку каждый подблок осуществляет связь только с одним субмодулем, который идентичен всем остальным субмодулям. Соответственно, обеспечивается истинно модульная конструкция не только силового электронного оборудования, но и системы управления, что облегчает разработку функций управления и упрощает установку, особенно проводки, а также обслуживание и технический осмотр многоуровневого силового преобразователя.
Как отмечено выше, один из двух сигналов, связанных с ШИМ, должен распределяться по времени. Это делается таким образом, чтобы события переключения вентилей в субмодулях происходили последовательно для субмодулей в каждом плече. Задача состоит в том, чтобы препятствовать одновременному переключению вентилей двух или более ячеек. Необходимый задержанный по времени несущий сигнал переключения или опорное напряжение переменного тока для каждого из подблоков одного плеча может генерироваться центральным блоком управления в том смысле, что центральный блок управления должен передавать индивидуальные опорные сигналы на каждый из подблоков, что не позволяет в полной мере пользоваться выгодами модульной конструкции.
Вместо этого предпочтительно, чтобы центральный блок управления посылал одни и тот же несущий сигнал переключения и опорное напряжение переменного тока на все подблоки одного плеча, тем самым минимизируя объем данных, передаваемых центральным блоком управления. Низкая скорость передачи данных имеет преимущество в отношении как надежности связи, так и затрат.
Если одни и те же несущий сигнал переключения и опорное напряжение переменного тока передаются центральным блоком управления на одно плечо, каждый подблок может применять необходимую задержку по времени к одному из двух сигналов, связанных с ШИМ, по отдельности до сравнения сигналов друг с другом.
В предпочтительном варианте осуществления задержка по времени заранее задана для каждого подблока, таким образом, чтобы задержанные несущие сигналы переключения или опорные напряжения переменного тока, соответственно, всех подблоков были равномерно распределены по времени относительно друг друга. Было показано, что равномерное распределение по времени одного из двух сигналов дает гладкую кривую напряжения переменного тока на клеммах переменного тока силового преобразователя, с низкой чувствительностью к гармоникам и другим возмущениям, поступающим из сети напряжения переменного тока, подключенной к клеммам переменного тока.
Для равномерного распределения по времени задержку по времени предпочтительно выбирают как функцию фазового сдвига 2π/(pM) между соседними подблоками, где p - количество импульсов, заданное как период времени опорного напряжения переменного тока, деленное на период времени несущего сигнала переключения, и M - количество субмодулей на фазную цепь, M=2·N.
В качестве несущего сигнала переключения предпочтительно использовать пилообразный сигнал.
В дополнительном варианте осуществления изобретения каждый подблок прибавляет значение поправки к амплитуде опорного напряжения переменного тока до осуществления ШИМ, в особенности до осуществления сравнения двух сигналов, связанных с ШИМ. Значение поправки выбирается пропорциональным разности между мгновенным напряжением uc_k на конденсаторе и опорным напряжением uc_ref на конденсаторе. Это препятствует отклонению всех напряжений uc_k на конденсаторе субмодулей от их соответствующего опорного значения uc_ref. В результате среднее значение напряжения на конденсаторе поддерживается, по существу, на одном и том же заранее заданном уровне, что обеспечивает надежное и быстрое управление силовым преобразователем и, таким образом, еще более гладкую кривую напряжения переменного тока на клеммах переменного тока.
Дополнительного повышения качества кривой напряжения переменного тока на клеммах переменного тока можно добиться, когда каждый подблок отфильтровывает низкочастотные составляющие сигнала разности между мгновенным напряжением uc_k на конденсаторе и опорным напряжением uc_ref на конденсаторе до прибавления его к амплитуде опорного напряжения переменного тока.
В конкретном варианте осуществления центральный блок управления передает опорное напряжение uc_ref на конденсаторе на каждый подблок, что предпочтительно по причине простоты передачи одного и того же значения для всех подблоков одного плеча.
Дополнительно предусмотрено, что каждый подблок передает мгновенное напряжение uc_k соответствующего конденсатора на центральный блок управления. Центральный блок управления может обрабатывать все значения напряжения на конденсаторе и создавать информацию, которая представляет общее состояние накопления энергии силового преобразователя. На основании этой информации центральный блок управления может, помимо прочего, генерировать надлежащие опорное напряжение uc_ref на конденсаторе и опорное напряжение переменного тока для каждого плеча.
В дополнительных вариантах осуществления центральный блок управления и подблоки обмениваются дополнительными сигналами друг с другом. В одной конфигурации центральный блок управления передает на подблоки сигнал BLK порядка, который представляет собой логический сигнал, определяющий, разрешено ли переключение соответствующего субмодуля или определенных вентилей в субмодуле. Альтернативно сигнал BLK порядка может рассылаться на все подблоки одновременно, что приводит к одновременной блокировке всех электронных силовых переключателей в преобразователе. В этом случае и согласно одному из вышеозначенных вариантов осуществления центральный блок управления может передавать на все подблоки одного плеча преобразователя одни и те же данные, а именно опорное напряжение переменного тока и несущий сигнал переключения для этого плеча, а также идентичное опорное напряжение uc_ref на конденсаторе и идентичный сигнал BLK порядка. Это позволяет минимизировать трудовые и финансовые затраты на реализацию и обслуживание силового преобразователя.
В еще одном варианте осуществления подблоки могут передавать информацию статуса на центральный блок управления. Одна такая информация статуса может представлять собой в случае, когда каждый из электронных силовых переключателей содержит последовательное соединение полупроводниковых устройств, например, транзисторов или запираемых GTO транзисторов, величину nh_k, указывающую количество полупроводниковых устройств в соответствующем полупроводниковом силовом переключателе, которые все еще управляемы, т.е. работоспособны. Такой сигнал может использоваться центральным блоком управления для генерации информации об оставшейся возможности преобразования напряжения силового преобразователя и для регулировки значений опорного напряжения uc_ref на конденсаторе и опорного напряжения переменного тока, соответственно.
Другая предусмотренная информация статуса представляет собой сигнал FAIL_k указания отказа субмодуля, который представляет собой логический сигнал, указывающий отказ в соответствующем субмодуле. Этот сигнал FAIL_k центральный блок управления может быть использован для мониторинга состояния и защиты, например, для принятия решения, когда нужно запретить переключение определенных субмодулей, и, таким образом, когда активировать соответствующий сигнал BLK порядка.
Что касается физической реализации системы управления возможны разные подходы. Подблоки могут представлять собой, например, устройства, которые объединены с субмодулями, но также могут располагаться на удалении от соответствующего субмодуля и подключены к нему посредством оптоволоконного кабеля или другого подходящего соединения. Подблоки могут содержать для обработки данных цифровой сигнальный процессор (DSP), вентильную матрицу, программируемую пользователем (FPGA), специализированную интегральную схему (ASIC) или их комбинацию. Центральный блок управления может осуществлять связь с 2·N·P подблоками с использованием электронной схемы и/или оптоволоконных кабелей. Обычно используется цифровая сигнализация с последовательной и/или параллельной связью.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопроводительные чертежи, на которых:
фиг.1 изображает топологию преобразователя, известного из уровня техники;
фиг.2 изображает схему источников напряжения в фазных цепях преобразователя, показанного на фиг.1, согласно уровню техники;
фиг.3 изображает два разных варианта осуществления субмодулей в преобразователе, показанном на фиг.1 и 2;
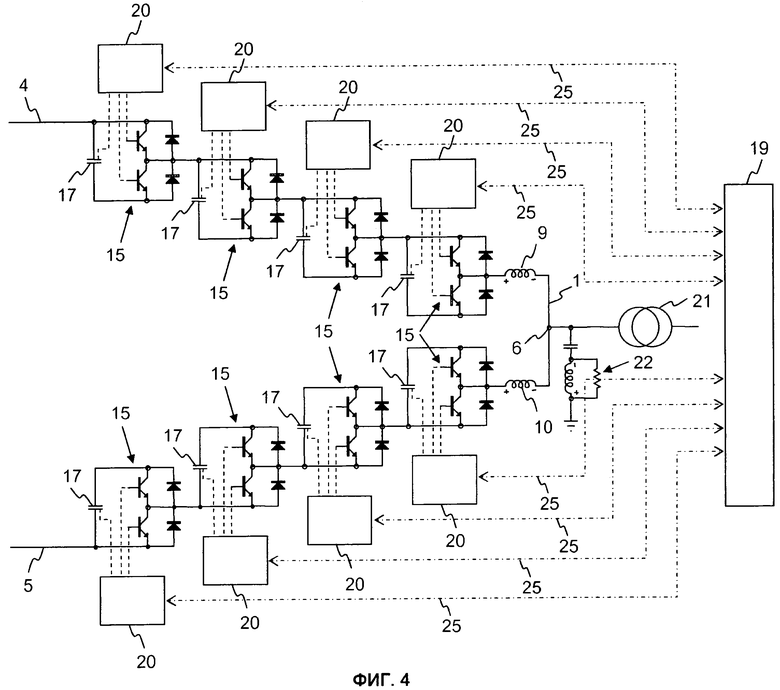
фиг.4 изображает одну фазную цепь преобразователя с распределенной системой управления согласно изобретению;
фиг.5 изображает принцип связи в распределенной системе управления, показанной на фиг.4;
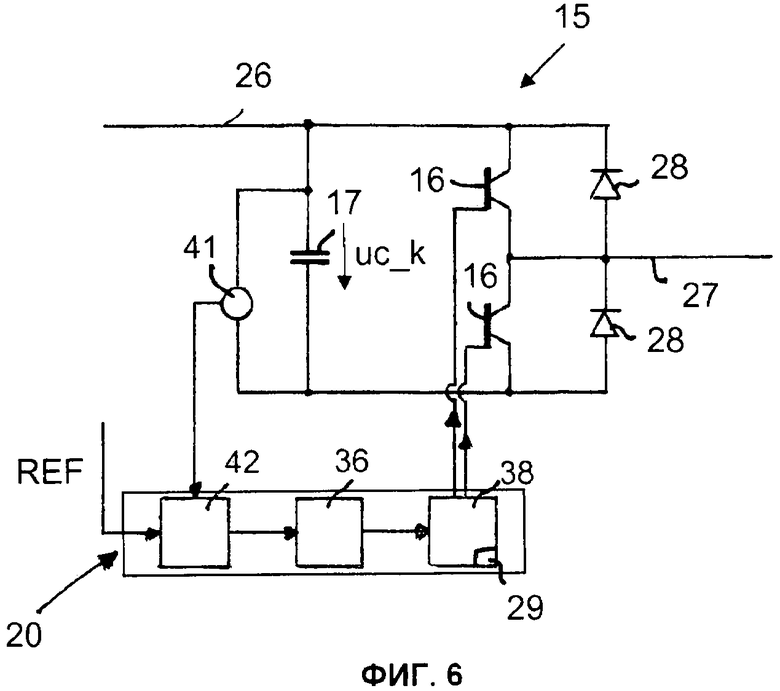
фиг.6 изображает подробную схему одного из подблоков, показанных на фиг.4;
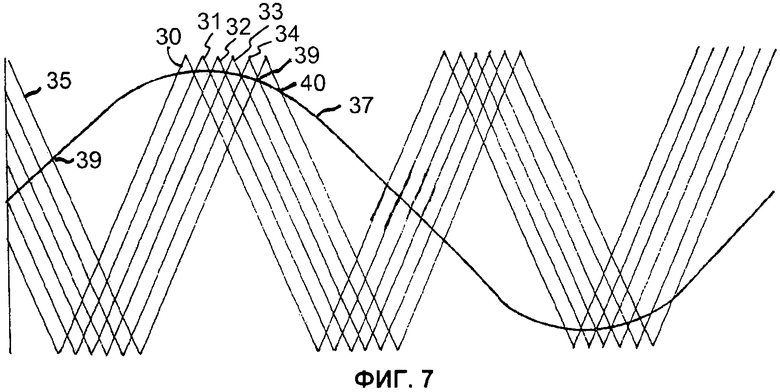
фиг.7 изображает индивидуальные несущие сигналы переключения для шести из шестнадцати электронных силовых переключателей фазной цепи, показанной на фиг.4;
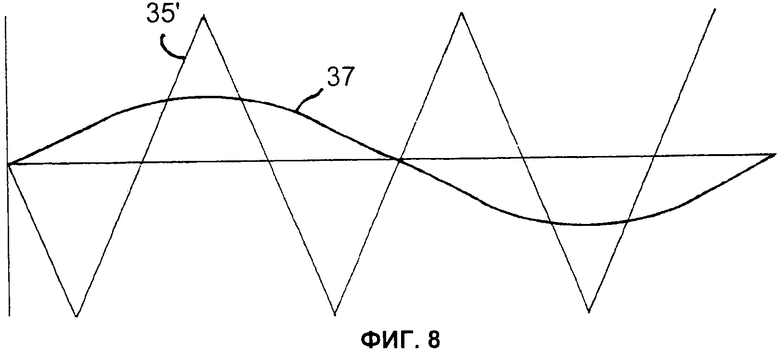
фиг.8 изображает диаграмму несущего сигнала переключения одного электронного силового переключателя и скорректированного опорного напряжения переменного тока для этого электронного силового переключателя.
Описание предпочтительных вариантов воплощения изобретения
Фиг.1-3 были объяснены выше в отношении структуры многоуровневого силового преобразователя и его системы управления согласно уровню техники.
Устройство для преобразования напряжения постоянного тока в напряжение переменного тока и наоборот согласно изобретению может содержать одну фазную цепь или несколько фазных цепей в зависимости от того сколько фаз имеет напряжение переменного тока. На фиг.4 показана одна фазная цепь 1 преобразователя согласно изобретению, где компоненты, описанные со ссылкой на фиг.1-3, имеют те же обозначения. В верхнем источнике напряжения верхнего плеча между первой клеммой 4 постоянного тока и первым дросселем 9 четыре субмодуля 15 типа 15b (см. фиг.3) соединены последовательно, и аналогичное последовательное соединение четырех субмодулей 15 типа 15b образует нижний источник напряжения нижнего плеча между вторым дросселем 10 и второй клеммой 5 постоянного тока. Соответственно, число N для показанной фазной цепи 1 равно 4 и число M равно 8. Верхний и нижний источники напряжения, соответственно, подключены через первый и второй дроссель, соответственно, к первой клемме 6 переменного тока. Трансформатор 21 и фильтрующее оборудование 22 показаны здесь на стороне переменного тока фазной цепи 1, т.е. напрямую подключенными к первой клемме 6 переменного тока.
Система управления для управления преобразованием напряжения преобразователя переменного тока в постоянный или наоборот, как показано, содержит центральный блок 19 управления и восемь подблоков 20, причем каждый из подблоков соответствует и подключен к одному из восьми субмодулей 15. На фиг.4 пунктирные линии схематически показывают, что подблоки 20 взаимодействуют, в частности, с электронными силовыми переключателями 16 и с конденсатором 17 соответствующего субмодуля 15. Между центральным блоком 19 управления и подблоками 15 штрихпунктирные соединительные линии 25 указывают передачу данных от центрального блока 19 управления на подблоки 15 и наоборот.
На фиг.5 показан общий принцип связи системы управления, принадлежащей верхнему плечу фазной цепи 1, показанной на фиг.4. Центральный блок 19 управления передает опорные данные REF через первую шину 24 данных на подблоки 20, и подблоки 20 возвращают данные CELL_k информации субмодуля, при N=4 и 1≤k≤N, через вторую шину 23 данных на центральный блок 19 управления. Первая и вторая шины 23 и 24 данных можно реализовать в виде отдельных однонаправленных шин или как общую двунаправленную шину, с использованием последовательных или параллельных протоколов связи. Для их физической реализации можно использовать электронную схему и/или оптоволоконные кабели.
В конкретном варианте осуществления изобретения опорные данные REF для верхнего плеча фазной цепи 1 содержат, помимо прочего, опорное напряжение ua_ref переменного тока и несущий сигнал s_sw переключения, которые идентичны для всех четырех подблоков 20 этого плеча. Несущий сигнал s_sw переключения согласно этому варианту осуществления является пилообразным сигналом. Каждый подблок 20 применяет задержку по времени к принятому несущему сигналу s_sw переключения, где задержка по времени равна фазовому сдвигу на 2π/pM между соседними подблоками 20, где p - количество импульсов, заданное как период времени опорного напряжения ua_ref переменного тока, деленный на период времени несущего сигнала s_sw переключения, и где M равно 8 в этом конкретном примере.
Кроме этого ua_ref и s_sw, опорные данные REF дополнительно содержат опорное напряжение uc_ref на конденсаторе для конденсатора 17 каждого субмодуля 15 и сигнал BLK порядка, который указывает, разрешено ли переключение соответствующего субмодуля 15, причем в этом конкретном варианте осуществления общее опорное напряжение uc_ref на конденсаторе и общий сигнал BLK порядка передается на все подблоки 20 плеча. Это значит, что передаются идентичные опорные данные REF, т.е. на первой шине данных 24 необходимо разместить только один пакет данных REF=[ua_ref; s_sw; uc_ref; BLK].
Каждые данные CELL_k информации субмодуля содержат мгновенное напряжение uc_k соответствующего конденсатора 17, которое измеряется датчиком и обрабатывается соответствующим подблоком 20. Подблок 20 использует принятое опорное напряжение uc_ref на конденсаторе и измеренное и, таким образом, мгновенное напряжение uc_k для определения значения поправки, пропорционального разности между мгновенным напряжением uc_k конденсатора 17 и опорным напряжением uc_ref на конденсаторе. Каждый подблок 20 прибавляет значение поправки к амплитуде опорного напряжения ua_ref переменного тока. После этого каждый подблок 20 использует задержанный несущий сигнал переключения и скорректированное опорное напряжение переменного тока для управления переключением электронных силовых переключателей 16 соответствующего субмодуля 15 согласно шаблону ШИМ, таким образом, чтобы каждый раз, когда задержанный несущий сигнал переключения пересекает скорректированное опорное напряжение переменного тока, на выходные клеммы 26 и 27 субмодуля 15 поступало либо напряжение на конденсаторе 17, либо нулевое напряжение.
Данные CELL_k информации субмодуля дополнительно содержат информацию статуса, а именно числа nh1_k и nh2_k, указывающие количество работоспособных полупроводниковых устройств в двух полупроводниковых силовых переключателях 16 субмодуля 15, и сигнал FAIL_k указания отказа субмодуля. Соответственно, пакет данных для каждого подблока 20, показанного на фиг.5, имеет следующий вид: CELL_k=[uc_k, nh1_k, nh2_k, FAIL_k].
Различные элементы каждого из подблоков 20, которые осуществляют вышеописанные функции управления, подробно показаны на фиг.6. Подблок 20 содержит первое средство 29, сконфигурированное для обеспечения индивидуального пилообразного напряжения 35 с задержкой по времени для управления электронными силовыми переключателями 16 субмодуля 15. Пилообразные напряжения для всех субмодулей 15 фазной цепи 1, показанной на фиг.4, идентичны, но равномерно распределены по времени относительно друг друга с вышеописанным фазовым сдвигом 2π/pM между соседними субмодулями 15. Рассматривая пилообразные напряжения в порядке субмодулей 15, начиная с самого верхнего субмодуля, который напрямую подключен к первой клемме 4 постоянного тока, и заканчивая самым нижним субмодулем, который напрямую подключен ко второй клемме 5 постоянного тока, можно видеть равномерное распределение по времени. Для упрощения иллюстрации, на фиг.7 показаны пилообразные напряжения 30-35 верхних шести из восьми субмодулей 15 фазной цепи 1.
Подблок 20, показанный на фиг.6, также содержит второе средство 36, сконфигурированное для генерации скорректированного опорного напряжения 37 переменного тока для соответствующего субмодуля 15 с той же частотой и фазой, что и у других субмодулей 15. Опорное переменное напряжение ua_ref имеет, таким образом, такую же частоту, что и напряжение на стороне переменного тока преобразователя, например, 50 Гц или 60 Гц. Подблок 20 дополнительно содержит средство 38 управления, сконфигурированное для управления соответствующим субмодулем 15 согласно шаблону ШИМ, таким образом, чтобы электронные силовые переключатели 16 переключались для смены состояния переключения с первого состояния ко второму состоянию и наоборот каждый раз, когда пилообразное напряжение 35 с задержкой по времени пересекает скорректированное опорное напряжение 37 переменного тока, как показано на фиг.7. Соответственно, в порядке примера, верхний электронный силовой переключатель 16 субмодуля 15 может открываться и нижний электронный силовой переключатель 16 может закрываться в точке пересечения 39 для обеспечения нулевого напряжения на клеммах 26, 27, до следующей точки 39 пересечения, в которой верхний электронный силовой переключатель 16 закрывается, и нижний электронный силовой переключатель 16 открывается для подачи напряжения uc_k на конденсаторе 17 между двумя клеммами 26, 27 до следующей точки пересечения 40, и т.д.
Подблок 20 принимает от датчика 41 измеренное напряжение uc_k на конденсаторе 17. Третье средство 42 подблока 20 предназначено для сравнения этого напряжения uc_k, которое является постоянным напряжением, с опорным напряжением uc_ref на конденсаторе, принятым в качестве одного из опорных сигналов REF от центрального блока 19 управления. Второе средство 36 сконфигурированно для вычисления значения смещения или поправки, зависящего от результата сравнения третьего средства 42 и для прибавления этого значения поправки к опорному напряжению ua_ref переменного тока, которое также принимается от центрального блока 19 управления. На практике это означает, что амплитуда опорного напряжения ua_ref переменного тока для единичного субмодуля 15 растет или падает, когда напряжение на конденсаторе 17, принадлежащем этому субмодулю, отклоняется от среднего напряжения на всех конденсаторах субмодулей фазной цепи 1.
На фиг.8 показано значительное снижение амплитуды опорного напряжения ua_ref переменного тока в подблоке 20, показанном на фиг.6, приводящее к скорректированному опорному напряжению 37' переменного тока. На фиг.8 дополнительно показано только индивидуальное пилообразное напряжение 35' для соответствующего субмодуля 15. Таким образом, шаблон ШИМ субмодуля 15, показанного на фиг.6, определяется точками пересечения кривых 35' и 37' на фиг.8, которые существенно отличаются от соответствующих точек пересечения на фиг.7. Оказалось, что этот способ индивидуальной регулировки опорного напряжения переменного тока для каждого субмодуля оказывает балансирующее влияние на постоянные напряжения на конденсаторах субмодулей, так что, если напряжение на конденсаторе субмодуля падает ниже среднего напряжения постоянной полярности всех конденсаторов, регулировка амплитуды опорного напряжения переменного тока приведет к увеличению напряжения на этом конденсаторе. Наоборот, если напряжение на конденсаторе превысит среднее значение, напряжение будет снижаться в результате коррекции амплитуды ua_ref.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОУРОВНЕВЫЙ СИЛОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 2015 |
|
RU2593393C1 |
| Одноячеечная структура с возможностью вложения для использования в системе преобразования энергии | 2015 |
|
RU2676752C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ ЧАСТОТЫ С МНОГОУРОВНЕВЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ И СПОСОБ УПРАВЛЕНИЯ ТАКИМ ПРЕОБРАЗОВАТЕЛЕМ | 2005 |
|
RU2289191C1 |
| Тяговый инвертор электрогрузовика | 2024 |
|
RU2825486C1 |
| Тяговый инвертор электромобильного транспорта | 2024 |
|
RU2824653C1 |
| Способ управления потенциалом нейтральной точки для однофазного преобразователя с фиксированной нейтральной точкой | 2015 |
|
RU2671839C2 |
| АКТИВНЫЙ ДЕМПФЕР | 2015 |
|
RU2703717C2 |
| СТАТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2012 |
|
RU2481691C1 |
| СТАТИЧЕСКИЙ МНОГОУРОВНЕВЫЙ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ ДЛЯ ПИТАНИЯ АСИНХРОННЫХ И СИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2005 |
|
RU2303851C1 |
| Источник бесперебойного питания | 2023 |
|
RU2803077C1 |
Изобретение относится к силовому преобразованию. Устройство для преобразования напряжения постоянного тока в напряжение переменного тока и наоборот содержит систему управления для управления преобразованием напряжения и, по меньшей мере, одну фазную цепь (1), в которой первый (Uvp1) источник напряжения подключен последовательно между первой клеммой (4) постоянного тока и первой клеммой (6) переменного тока и в которой второй (Uvn1) источник напряжения подключен последовательно между первой (6) клеммой переменного тока и второй клеммой (5) постоянного тока. Каждый из источников напряжения содержит, по меньшей мере, первый и второй субмодули (15), соединенные последовательно, причем каждый субмодуль (15) содержит, по меньшей мере, два электронных силовых переключателя (16), соединенные параллельно с, по меньшей мере, одним конденсатором (17). Система управления содержит центральный блок (19) управления и, по меньшей мере, два подблока (20), причем центральный блок (19) управления передает на каждый подблок (20) опорное напряжение (ua_ref) переменного тока и несущий сигнал (s_sw) переключения, и каждый подблок (20) управляет переключением электронных силовых переключателей (16) одного из субмодулей (15) согласно шаблону ШИМ таким образом, чтобы каждый раз, когда несущий сигнал (s_sw) переключения пересекает опорное напряжение (ua_ref) переменного тока, на выходные клеммы (26, 27) соответствующего субмодуля (15) поступало либо напряжение на конденсаторе (17), либо нулевое напряжение. Технический результат - минимизация объема данных передаваемых центральным блоком управления. 13 з.п. ф-лы, 8 ил.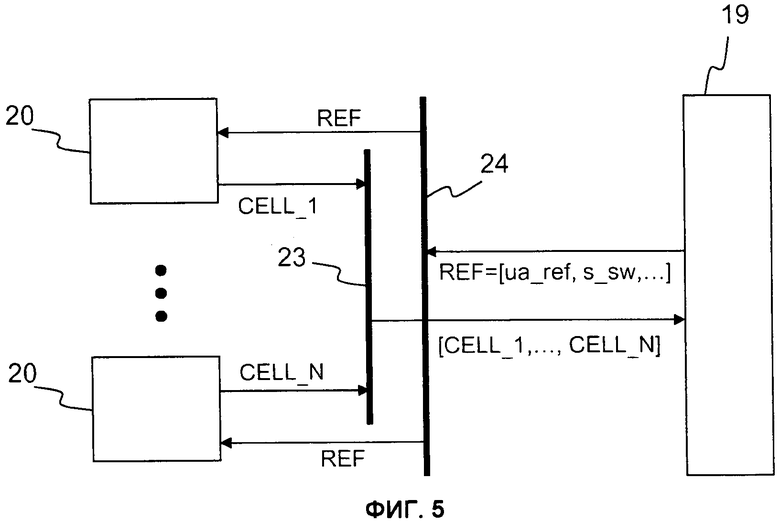
1. Устройство для преобразования напряжения постоянного тока в напряжение переменного тока и наоборот, содержащее систему управления для управления преобразованием напряжения и, по меньшей мере, одну фазную цепь (1), в которой первый (Uvp1) источник напряжения подключен последовательно между первой клеммой (4) постоянного тока и первой клеммой (6) переменного тока, и второй (Uvn1) источник напряжения подключен последовательно между первой клеммой (6) переменного тока и второй клеммой (5) постоянного тока, причем каждый из источников напряжения содержит, по меньшей мере, первый и второй субмодули (15), соединенные последовательно, причем каждый субмодуль (15) содержит, по меньшей мере, два электронных силовых переключателя (16), соединенных параллельно с, по меньшей мере, одним конденсатором (17), отличающееся тем, что
система управления содержит центральный блок (19) управления и столько же подблоков (20), сколько субмодулей (15), причем центральный блок (19) управления выполнен с возможностью передачи на каждый подблок (20) опорного напряжения (ua_ref) переменного тока и несущего сигнала (s_sw) переключения, при этом каждый подблок (20) выполнен с возможностью управления переключением электронных силовых переключателей (16) одного из субмодулей (15) согласно шаблону ШИМ, так чтобы каждый раз, когда несущий сигнал (s_sw) переключения пересекает опорное напряжение (ua_ref) переменного тока, инициировалось изменение состояния соответствующего субмодуля (15) с первого состояния во второе состояние или наоборот, причем на выходные клеммы (26, 27) соответствующего субмодуля (15) во втором состоянии подается напряжение на конденсаторе (17), а в первом состоянии подается нулевое напряжение, причем центральный блок (19) управления конфигурирован для передачи одинакового опорного напряжения (ua_ref) переменного тока и одинакового несущего сигнала (s_sw) переключения на все подблоки (20), принадлежащие одному и тому же источнику напряжения (Uvp1, Uvn1).
2. Устройство по п.1, в котором каждый подблок (20) конфигурирован для применения индивидуальной задержки по времени к несущему сигналу (s_sw) переключения до осуществления управления ШИМ.
3. Устройство по п.1, в котором каждый подблок (20) конфигурирован для применения индивидуальной задержки по времени к опорному напряжению (ua_ref) переменного тока до осуществления управления ШИМ.
4. Устройство по п.2 или 3, в котором задержка по времени заранее задана для каждого подблока (20), так чтобы задержанные несущие сигналы переключения или опорные напряжения переменного тока соответственно всех подблоков (20) были равномерно распределены по времени относительно друг друга.
5. Устройство по п.4, в котором задержка по времени равна фазовому сдвигу на 2π/(рМ) между соседними подблоками (20), где р - количество импульсов, заданное как период времени опорного напряжения (ua_ref) переменного тока, деленный на период времени несущего сигнала (s_sw) переключения, и М - количество субмодулей (15) на фазную цепь (1).
6. Устройство по п.1, в котором несущий сигнал (s_sw) переключения является пилообразным сигналом.
7. Устройство по п.1, в котором каждый подблок (20) конфигурирован для прибавления значения поправки к амплитуде опорного напряжения (ua_ref) переменного тока до осуществления ШИМ, причем значение поправки пропорционально разности между мгновенным напряжением (uc_k) на конденсаторе (17) и опорным напряжением (uc_ref) на конденсаторе.
8. Устройство по п.7, в котором каждый подблок (20) конфигурирован для отфильтровывания низкочастотных составляющих сигнала разности между мгновенным напряжением (uc_k) на конденсаторе (17) и опорным напряжением (uc_ref) на конденсаторе до его сложения с амплитудой опорного напряжения (ua_ref) переменного тока.
9. Устройство по п.8, в котором центральный блок (19) управления конфигурирован для передачи опорного напряжения (uc_ref) на конденсаторе на каждый подблок (20).
10. Устройство по любому из пп.7-9, в котором каждый подблок (20) конфигурирован для передачи мгновенного напряжения (uc_k) на своем соответствующем конденсаторе (17) на центральный блок (19) управления.
11. Устройство по п.1, в котором центральный блок (19) управления конфигурирован для передачи на подблоки (20) сигнала (BLK) порядка, определяющего, разрешено ли переключение, по меньшей мере, одного из электронных силовых переключателей (16).
12. Устройство по п.1, в котором подблоки (20) конфигурированы для передачи информации (nh_k, FAIL_k) статуса на центральный блок (19) управления.
13. Устройство по п.1, в котором каждый из подблоков (20) подключен к соответствующему субмодулю (15) через оптоволоконный кабель.
14. Устройство по п.1, в котором центральный блок (19) управления и подблоки (20) конфигурированы для осуществления связи друг с другом через последовательную или параллельную шину данных или через беспроводное соединение.
| МНОГОУРОВНЕВЫЙ ИНВЕРТОР НАПРЯЖЕНИЯ И СПОСОБ ЕГО УПРАВЛЕНИЯ | 2002 |
|
RU2259628C2 |
| US 7206211 B2, 17.04.2007 | |||
| JP 2007325480 A, 13.12.2007. | |||

