Предлагаемые устройство и способ относятся к области электротехники и могут быть использованы в частотно-регулируемых приводах с электродвигателями, связанными с исполнительными органами механотронных систем.
Известно устройство для управления инвертором с широтно-импульсной модуляцией, содержащее инвертор, блок выделения пульсаций, модулятор, датчики амплитудного значения входного и выходного напряжений, блок обнаружения перегрузки, задатчик параметров, блок аналого-цифрового преобразования, микропроцессор и формирователь сигналов управления (пол. модель РФ №12304, кл. Н 02 М 5/42, 1999). Указанное устройство имеет невысокую надежность из-за невозможности анализа предаварийной ситуации или возникновения неисправностей и не может быть использовано для средних и высоких значений напряжения промышленных сетей.
Известно устройство преобразования частоты с элементами управления для средних и высоких промышленных напряжений, содержащее питающий трансформатор переменного тока, выходы которого подключенны к силовым блокам, образующим три последовательных ряда повышения напряжения на фазы нагрузки (патент Германии №19832225, кл. Н 02 М 5/22, 2003). В нем сделана попытка унифицировать отдельные элементы управления для использования их в сетях высоких напряжений. Указанное устройство также имеет невысокую надежность в случае возникновения неисправностей, хотя бы в одном силовом блоке.
Известно устройство для управления пребразователем частоты с испозованием многоуровневого инвертора и способ управления (патент США №6166513, Н 02 Р 7/36, 2000). Указанное устройство содержит питающий 3-х фазный трансформатор, выходные обмотки которого подключены со сдвигом фазы к рядам силовых блоков, образующим фазы питания нагрузки, схему управления с элементами оптоэлектроники, причем каждый силовой блок содержит дублирующий регенеративный узел. В указанном устройстве решается задача повышения надежности преобразования частоты достаточно сложными аппаратурными средствами, причем быстродействие системы недостаточно.
Известно устройство для управления преобразователем частоты с многоуровневым инвертором напряжения, содержащее входной силовой трансформатор и ряды силовых блоков на каждой фазе нагрузки (Европейский патент №1311058, Н 02 М 5/453, 2003). Каждый силовой блок устройства содержит выпрямитель, активный фильтр входных гармоник, промежуточный разделительный емкостной фильтр и трехточечный регулятор переменного тока и в этих силовых блоках решается задача уменьшения влияния пиковых напряжений на работоспособность устройства. Однако надежность преобразования остается невысокой из-за сложности элементной базы устройства, также как и невысоким является быстродействие системы управления.
Наиболее близкими техническими решениями к предлагаемым являются устройство для управления преобразователем частоты с многоуровневым широтно-имульсным инвертором напряжения и способ управления (патент США №5625545, Н 02 М 7/515, 1997), в которых решается задача уменьшения влияния на процесс преобразования частоты таких факторов как пульсация входного тока, образование высших гармоник в элементах силовых блоков, а также повышение надежности за счет шунтирования неисправного силового блока байпасной цепью.
Недостатками указанных технических решений являются отсутствие возможности промежуточного контроля состояния системы управления, сложность конструктивного выполнения шунтирующей цепи, невысокие помехозащищенность и быстродействие устройства.
Техническим результатом предлагаемых технических решений является устраненение или существенное уменьшение указанных выше недостатков, в том числе, расширение фунциональных возможностей за счет обеспечения промежуточного контроля состояния системы управления с одновременным повышением быстродействия, надежности и упрощения конструкции устройства.
Достижение указанного технического результата в известном устройстве для управления преобразователем частоты с многоуровневым инвертором напряжения, содержащем входной трансформатор питания, выходные обмотки которого подключены к соответствующим силовым блокам, включенным, по меньшей мере, по одному в соответствующий ряд на каждую фазу питания трехфазного электродвигателя переменного тока, а также включающую в себя оптоволоконную линию передачи данных схему обработки информационных сигналов посредством компьютера или интерфейса управления, особенностью изобретательского замысла является то, что схема обработки информационных сигналов и формирования сигналов управления содержит три оптоволоконных концентратора, соответствующих рядам силовых блоков по фазам питания электродвигателя, формирователь сигналов состояния выходного напряжения многоуровневого инвертора, сигнальную панель, главную панель управления, блок оперативного контроля работы преобразователя частоты, интерфейс управления, формирователи сигналов управления работой преобразователя частоты и выходном токе многоуровневого инвертора напряжения, а также блок логической обработки сигналов и управления, при этом выходы с каждого ряда силовых блоков фаз питания электродвигателя подключены раздельно к входам формирователя сигналов состояния выходного напряжения многоуровневого инвертора, соответствующие выходы которого подключены к входам сигнальной панели, другие входы которой подключены, соответственно, к формирователям сигналов управления работой преобразователя частоты и выходном токе многоуровневого инвертора напряжения, а выход - к входу блока оперативного контроля работы преобразователя частоты, связанного соответствующими портами с центральным компьютером управления, интерфейсом управления, главной панелью управления и блоком логической обработки сигналов и управления, причем каждый силовой блок снабжен информационным оптоволоконным разъемом, все силовые блоки рядов, соответствующих фазам питания электродвигателя, подключены своими информационными оптоволоконными разъемами к соответствующим оптоволоконным концентраторам, подключенным к главной панели управления, связанной информационными шинами с сигнальной панелью и блоком логической обработки сигналов и управления, снабженным разъемами для связи с сигналами датчиков технологических параметров и центральным компьютером управления.
Кроме того, каждый силовой блок может состоять из последовательно включенных вентильного коммутатора, содержащего неуправляемый вентильный мост, выполненный на шести диодах, к входу которого подключена трехфазная сеть питающего трансформатора, буферной цепи, подключенной к выходу вентильного моста и состоящей, по меньшей мере, из двух последовательно включенных емкостей, каждая из которых зашунтирована своим балансировочным сопротивлением, однофазного автономного инвертора напряжения с широтно-импульсной модуляцией в виде управляемого моста, выполненного на четырех биполярных транзисторах с изолированными затворами и четырех, включенных встречно-параллельно этим транзисторам, диодах, а также байпасного вентильного моста, выполненного на четырех диодах, одна клемма входа которого подключена к точке последовательного соединения первого и третьего транзистора управляемого моста, другая - к точке последовательного соединения второго и четвертого транзисторов управляемого моста, а к выходным клеммам байпасного вентильного моста подключен управляемый тиристор, управляющий вход которого подведен к информационному оптоволоконному разъему через блок согласования, с которым связаны также затворы транзисторов.
Указанный технический результат в известном способе управления преобразователем частоты с многоуровневым инвертором напряжения, включающем формирование выходного напряжения каждой фазы многоуровневого инвертора напряжения в виде ступенчатой синусоиды путем сложения волн напряжения ряда включенных последовательно силовых блоков, к каждому из которых подведено трехфазное питание от входного трансформатора, вторичные обмотки которого предварительно разделены на три группы с числом обмоток в группе, равным количеству силовых блоков в ряду и между соседними обмотками группы установлен постоянный сдвиг фаз, управление частотой выходного напряжения многоуровневого инвертора напряжений, осуществляя изменение ширины импульса фазы выхода каждого силового блока, путем подачи управляющего сигнала на открытие транзисторов в противоположных плечах управляемого моста каждого силового блока для получения максимальных положительного и отрицательного напряжений выхода или на открытие транзисторов в смежных плечах управляемого моста - для получения напряжения выхода, равного нулю, а также обеспечение обхода дефектного силового блока выходным нагрузочным током, в случае возникновения неисправности этого силового блока, путем включения управляемого тиристора байпасного моста, достигается тем, что при возникновении неисправности дефектного силового блока одновременно подают сигналы на открытие транзисторов в смежных плечах управляемых мостов и управляемые тиристоры байпасных мостов этого дефектного силового блока и двух других силовых блоков, занимающих такие же по счету от начала соответствующего ряда позиции в рядах последовательно включенных силовых блоков формирования выходных напряжений двух других фаз многоуровневого инвертора напряжений, причем момент одновременной подачи сигналов на открытие транзисторов в смежных плечах управляемых мостов и управляемые тиристоры байпасных мостов дефектного силового блока и соответствующих ему двух других блоков в двух других рядах силовых блоков определяют на основании сравнения информационных сигналов с выхода каждого ряда силовых блоков и соответствующих им информационных сигналов с каждого соответствующего этим рядам оптоволоконного концентратора.
Реализация и осуществление устройства и способа поясняется чертежами.
На фиг.1 представлена блок-схема предлагаемого устройства для управления преобразователем частоты с многоуровневым инвертором напряжения;
на фиг.2 - принципиальная схема силового блока с встроенным байпасным вентильным мостом;
на фиг.3 представлен график входного тока;
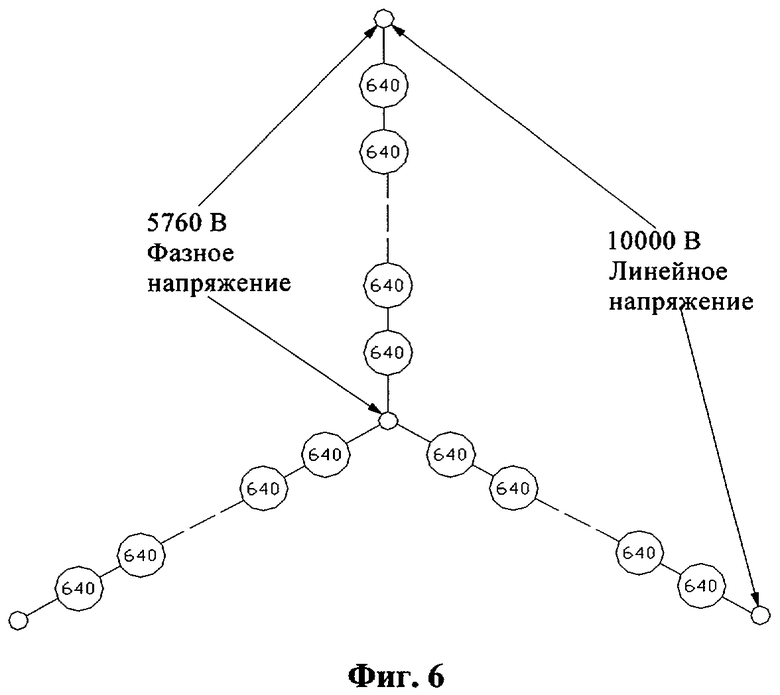
на фиг.4, 5, 6 показаны схемы сложения напряжения преобразователя частоты, соответственно, на 6 кВ,3 кВ и 10 кВ;
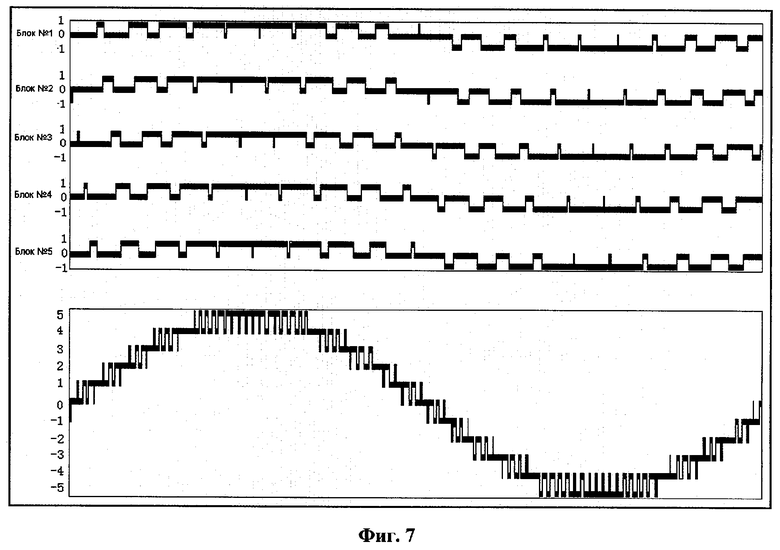
на фиг.7 представлены графики выходов с силовых блоков преобразователя частоты на 6 кВ и график их сложения на отдельной выходной фазе;
на фиг.8, 9 представлены графики выходного напряжения и выходного тока.
Устройство для управления преобразователем частоты с многоуровневым инвертором напряжения содержит входной трансформатор питания 1, выходные обмотки 2 которого подключены к соответствующим силовым блокам 3, включенным в соответствующий ряд на каждую фазу 4 питания трехфазного электродвигателя 5. Оптоволоконная линия 6 передачи данных каждого силового блока связывает его посредством информационного оптоволоконного разъема 27 с одним из трех оптоволоконных концентраторов 7А, 7В или 7С, соответствующих рядам силовых блоков по фазам питания электродвигателя. Помимо этого устройство управления включает формирователь сигналов состояния выходного напряжения многоуровневого инвертора 8 (делитель напряжения), сигнальную панель 9, главную панель управления 10, блок оперативного контроля работы преобразователя частоты 11 (системный компьютер), интерфейс управления 28, формирователи сигналов управления работой преобразователя частоты (не показаны), связанных с сигнальной панелью 9 линиями связи 12 и 13, соответственно, формирователи сигнала о выходном токе 14, а также блок логической обработки сигналов и управления 15. Выходы с каждого ряда силовых блоков фаз питания электродвигателя подключены раздельно ко входам формирователя сигналов состояния выходного напряжения многоуровневого инвертора (делителя напряжения). Его соответствующие выходы подключены ко входам сигнальной панели 9. На другие ее входы подключены, соответственно, линии связи 12 и 13 с формирователей сигналов напряжений и токов управления работой преобразователя частоты и линии связи с формирователей сигнала 14 о выходном токе многоуровневого инвертора напряжения. Выход сигнальной панели подключен к входу блока оперативного контроля работы преобразователя частоты, являющегося по существу системным компьютером и связанного соответствующими портами с центральным компьютером управления, интерфейсом управления, главной панелью управления и блоком логической обработки сигналов и управления. Блок логической обработки сигналов и управления имеет разъемы для связи с сигналами датчиков технологических параметров (не показаны) и центральным (главным) компьютером управления, а главная панель управления имеет двунаправленную связь с каждым из трех оптоволоконных концентраторов.
Каждый силовой блок состоит из последовательно включенных вентильного коммутатора 16, содержащего неуправляемый вентильный мост, выполненный на шести диодах, к входу которого подключена трехфазная сеть питающего трансформатора, буферной цепи 17, подключенной к выходу вентильного моста и состоящей из последовательно включенных емкостей 18, каждая из которых зашунтирована своим балансировочным сопротивлением 19, однофазного автономного инвертора напряжения 20 в виде управляемого моста, выполненного на четырех биполярных транзисторах Q1, Q2, Q3, Q4 с изолированными затворами и четырех, включенных встречно-параллельно этим транзисторам, диодах 21, а также байпасного вентильного моста 22, выполненного на четырех диодах, одна клемма 23 входа которого подключена к точке последовательного соединения первого Q1 и третьего Q3 транзистора управляемого моста, другая клемма входа 24 - к точке последовательного соединения второго Q2 и четвертого Q4 транзисторов управляемого моста, а к выходным клеммам 25 байпасного вентильного моста подключен управляемый тиристор 26, управляющий вход которого подведен к информационному оптоволоконному разъему 27 через блок согласования (не показан), с которым связаны также затворы транзисторов Q1, Q2, Q3, Q4.
Устройство работает следующим образом.
Оптоволоконный концентратор по оптоволоконным линиям посылает сигналы силовым блокам, причем каждый концентратор работает с рядом силовых блоков одной фазы. Оптоволоконные концентраторы периодически посылают силовым блокам сигнал о ширине импульса (PWM) или режиме работы. Получив сигнал силовой блок сразу формирует внутренние команды и сигналы о требуемом состоянии, кроме того силовые блоки направляют в оптоволоконные концентраторы сигнал с кодом неисправности. В совокупности все это значительно повышает быстродействие преобразователя частоты.
Сигнальная панель собирает сигналы о входящих на преобразователь частоты напряжении и токе, а также о напряжении и токе на выходе преобразователя частоты, и, кроме того, обрабатывает сигнал управления, фильтрует его и рассылает. Разосланный сигнал используется для управления преобразователем частоты, защиты от неисправностей, в том числе, силовых блоков, а так же он предоставляет данные блоку оперативного контроля работы преобразователя частоты (системному компьютеру).
В главной панели управления использованы высокоскоростные чипсеты, которые отвечают за все функции управления двигателем. Для регулирования частоты напряжения на трех фазах используется векторное управление. Параметры для работы преобразователя частоты сообщаются через RS232 порт с системным компьютером и порт обмена данными с блоком логической обработки сигналов управления. Главная панель управления содержит программную модель электродвигателя, которая совместно с обратной связью по току (посредством формирователей сигналов о выходном токе и сигнальной панели) и обратной связью по напряжению (посредством формирователя сигналов состояния выходного напряжения многоуровневого инвертора и сигнальной панели) осуществляет векторное управление электродвигателем.
В системный компьютер для удобства работы встроен интерфейс на базе WINDOWS NT, который позволяет собирать информацию о работе преобразователя частоты, обрабатывать ее и поддерживать связь с другими системами. Пребразователь частоты может управляться центральным (главным) компьютером или же может входить в сеть управления. Сигнал управления от сигнальной панели или интерфейса управления собирается в 32 канальном высокоскоростном концентраторе данных, затем рассчитываются параметры работы преобразователя частоты: ток, напряжение, мощность, коэффициент мощности, тут также осуществляется функция вывода данных и графиков для оператора, а также обеспечивается защита двигателя от перегрузки и превышения тока, подается команда на срабатывание соответствующей сигнализации. Связь с главной панелью управления осуществляется через порт RS232, связь с блоком логической обработки сигналов и управления (далее PLC) - через порт RS485, тем самым обеспечивается оперативный контроль над работой преобразователя частоты.
PLC служит для логической обработки сигналов управления работой преобразователя частоты и преобразования их в управляющие сигналы коммутации IGBT транзисторов внутри преобразователя частоты, а так же сигналов при работе оператора на месте через главную панель управления с интерфейсом управления и сигналов о состоянии преобразователя частоты, что расширяет функциональные возможности преобразователя частоты. PLC имеет 2 входных аналоговых канала и 2 выходных аналоговых канала и дискретные входы/выходы, количество которых определяется конкретной задачей и используются они для ввода/вывода информации. Данные по вводу служат для обработки контрольных параметров работы (поток, давление) или для задания данных при работе в режиме управления от внешнего задатчика. Параметры по выходу могут быть такие как: частота работы преобразователя, ток, напряжение, мощность, коэффициент мощности. PLC также может выполнять функции PID регулятора (работа в закрытом режиме).
Схема силового блока показана на фиг.2. Входные цепи R, S, Т подключаются к низкому трехфазному напряжению вторичной обмотки трансформатора. Напряжение с трансформатора через диодный трехфазный выпрямитель заряжает конденсаторы. Накопленная электрическая энергия конденсаторов расходуется однофазным мостом, состоящим из IGBT транзисторов Q1-Q4, для формирования напряжения ШИМ на выходах L1-L2.
Силовой блок по оптоволоконному кабелю получает сигнал на открывание и закрывание IGBT транзисторов Q1-Q4 и, используя метод векторного управления (PWM), формирует ширину импульса выходного напряжения одной фазы. Каждая фаза имеет только 3 возможных значения выходного напряжения: при открытых Q1 и Q4 выходное напряжение L1 и L2 соответствует 1; при открытых Q2 и Q3 выходное напряжение L1 и L2 соответствует 1; при открытых Q1 и Q2 или Q3 и Q4 выходное напряжение L1 и L2 соответствует 0. График выходного напряжения показан на фиг.8.
Силовые блоки имеют встроенную шунтирующую байпасную цепь. При возникновении неисправностей в каком-либо силовом блоке, например:
выгорание предохранителя, неисправность или перегрев IGBT, при которых не возможно дальнейшее продолжение работы, на данном силовом блоке и 2 других блоках, работающих с ним в одной группе (в двух других фазах) в целях обеспечения дальнейшей работоспособности автоматически включаются байпасные цепи. При этом Q1-Q2 блокируют выход, управляемый тиристор К открывается и подается сигнал о включении байпасной цепи. При включении этой цепи силового блока, поскольку в этом случае количество силовых блоков на фазу меньше положенного, снижается номинальное выходное напряжение. Однако, если преобразователь частоты работает на низкой частоте, для 6 кВ ниже 40 Гц, для 10 кВ ниже 43,7 Гц, преобразователь частоты автоматически повышает выходное напряжение работающих силовых блоков и тем самым обеспечивает необходимые выходные значения.
Для нагрузки типа вентиляторов и насосов мощность на валу прямо пропорциональна кубу скорости, так при включении байпасной цепи одного силового блока на 6 кВ максимальная выходная мощность может быть 80%, а частота соответственно ниже 46,4 Гц, в этих условиях преобразователь частоты может обеспечивать необходимые выходные параметры. На самом деле при выборе преобразователя частоты рекомендуется делать некоторый запас, таким образом, частота может быть выше. При большой нагрузке, если преобразователь частоты (ПЧ) не может обеспечить необходимые показатели на выходе при включении байпасной цепи силового блока, то система автоматически снижает частоту работы до уровня, при котором значение выходного тока будет находиться в разрешенных пределах (номинальных значениях).
Особенности включения байпасной цепи одного силового блока отражены в таблице 1.
В конструктивном исполнении каждый силовой блок имеет отдельную панель управления и драйвера. Драйвер служит для управления IGBT и управляемым тиристором байпасной цепи силового блока. Панель управления через информационный оптоволоконный разъем связана с оптоволоконным концентратором одной из фаз системы посредством оптоволоконного кабеля. Оптоволоконный кабель является единственным каналом связи между главной панелью управления и силовым блоком, тем самым достигается абсолютная электрическая развязка силового блока от главной панели управления системы.
В преобразователе частоты могут быть выбраны режимы управления на месте или удаленный, при этом режимы задания параметров подразделяются на числовой, по напряжению (в диапазоне 0-10 В) или по току (в диапазоне 4-20 мА).
Кроме того, может быть выбран режим задания параметров из центра управления (от центрального компьютера).
Одновременно выбирают функцию обратной связи при изменении параметров.
Ввод управления и обратная связь управления идет через один и тот же PLC - блок, поэтому сигнал ввода управления и обратной связи управления должен быть одинаковым, либо оба сигнала по напряжению, либо оба сигнала по току.
При выборе закрытого режима работы для задания параметров PID регулятора блок PLC использует формулы расчетов, приводимые ниже:
Мn(выходной)=МРn(пропорционально)+MIn(интеграл)+MDn(дифференциальный коэффициент)
MPn=KC·(SPn-PVn)
MIn=КC·ТS/TI·(SPn-PVn)+MX
MDn=KC·TD/TS·(PVn-1-PVn),
где
Мn - выходное значение при расчете для примера n;
МРn - пропорциональное значение при расчете для примера n;
MIn - интегральное значение при расчете для примера n;
MX - интегральные значения при расчете для примеров n-1 (прежнее интегральное значение), сумма всех предыдущих интегральных значений. Каждый раз при расчете MIn данный параметр обновляется.
MDn - интегральное значение при расчете для примера n;
SPn - заданное значение контрольного параметра при расчете для примера n;
PVn - переменная при расчете для примера n, т.е. реальное значение контрольного параметра;
PVn-1 - переменная при расчете для примера n, дифференциальный коэффициент для дальнейших расчетов, необходимо сохранять переменную. При расчете первого значения PVn-1=PVn.
КC - пропорциональный коэффициент, определяющий погрешность выходных значений - разность значения контрольного параметра и ожидаемого значения (SPn-PVn), т.е это показатель чувствительности системы. При увеличении абсолютного значения данного коэффициента можно повысить скорость регулирования скорости, но если он будет слишком большим, мощность системы из-за постоянного регулирования будет резко изменять свои значения.
Значение этого коэффициента может быть положительным, отрицательным и 0. Если при положительных значениях интегрального и дифференциального коэффициентов значение пропорционального коэффициента положительное, то преобразователь частоты настраивается по прямому регулированию. То есть, если заданное значение выше значения системы (feedback), то увеличивается частота регулирования, если меньше - частота уменьшается. При отрицательном значении коэффициента преобразователь частоты работает по обратному регулированию. То есть, если заданное значение выше значения системы, то частота уменьшается, если меньше - увеличивается.
Если пропорциональное регулирование не требуется, то значение коэффициента следует выставить 0. В этом случае PID регулятор при расчетах интегрального и дифференциального коэффициентов будет использовать 1 как значение по умолчанию.
TS - интервал расчета данных PID регулятором, единица измерения - сек. Должно быть положительным, не может быть отрицательным либо 0. По умолчанию установлено 0,1 сек.
TI - интегральный коэффициент - константа времени интеграла PID регулятора, единица измерения - сек. Может быть положительным, отрицательным, но не 0.
При увеличении абсолютного значения данного параметра быстрота изменения скорости будет снижаться. Если нет необходимости в интегральном регулировании, то интегральный коэффициент необходимо выставить равным бесконечности.
TD - дифференциальный коэффициент - константа времени дифференциала PID регулятора, единица измерения - сек. Может быть положительным, отрицательным и 0. Обычно положительна.
При отсутствии необходимости в дифференциальном регулировании, данный коэффициент необходимо задать как 0.
Что касается интегрального и дифференциального управления при пропорциональном коэффициента, равном 0, то при положительном времени интегрального и дифференциального коэффициентов осуществляется прямое управление преобразователем частоты, если отрицательное - обратное.
При работе в закрытом режиме по умолчанию выставляют значение контрольного параметра (давление воздуха, поток). Обычно при работе системы в закрытом режиме ожидаемое значение контрольного параметра не меняют, например, при необходимости выравнивания системы на уровне какого-либо конкретного значения температуры или давления, оператор задает ожидаемое значение.
При работе системы в закрытом режиме оператор может задавать параметры непосредственно из главного меню интерфейса пользователя.
Для обеспечения процесса управления посредством интерфейса пользователя, оператор может задавать функции, вводить данные, отображать графики входа и выхода, просматривать записи о работе преобразователя частоты, анализировать неисправности. Оператор может непосредственно запускать двигатель, задавать частоту работы, медленно останавливать двигатель, самостоятельно останавливать его, восстанавливать первоначальные настройки, в том числе, при управлении с обратной связью.
Если задание данных устанавливается при использовании программной модели электродвигателя, то частота или управляемое заданное значение сообщается управляющим сигналом моделирования.
При возникновении неисправностей преобразователь частоты автоматически входит в состояние защиты от неисправностей, при котором блокируется включение основного питания и запуска электродвигателя. Если неисправности устранены, преобразователь частоты можно вернуть в исходное состояние, т.е. вывести его из состояния защиты, при этом он переходит в нормальное исходное состояние.
При необходимости возможен просмотр записей о неисправностях на настоящий момент и о случавшихся ранее. В памяти максимально может храниться информация о 100 случаях возникновения неисправностей.
В случае работы с включением байпасных цепей одной или двух групп преобразователь частоты находится в работоспособном состоянии, а причину неисправностей в одном или двух силовых блоках и место их возникновения можно узнать в записях о неисправностях.
В преобразователе частоты реализован принцип переменный-прямой-переменный ток с одним входным силовым трансформатором. Преобразование из постоянного в переменный ток выполнено в силовых блоках на IGBT транзисторах.
Входной трансформатор первичной обмотки (соединение звездой) подключен к трехфазной сети 3, 6 или 10 кВ. Так как силовые блоки подключены последовательно, то повышение напряжения происходит методом сложения волн. На фиг.4 показана схема сложения для 6 кВ.
Трансформатор изготовлен в сухом исполнении, имеет воздушное охлаждение, обладает продолжительным ресурсом и не требует обслуживания. Вторичные обмотки соединены по схеме треугольник, для того чтобы обеспечить каждый силовой блок трехфазным питанием. Каждая группа вторичных обмоток отличается фазовым смещением трансформируемого напряжения. Сдвиг фазы напряжения на последующей группе вторичных обмоток относительно фазы напряжения на предыдущей группе вторичных обмоток определяется результатом деления 60 угловых градусов на количество групп вторичных обмоток (или количество силовых блоков в ряду). Такое техническое решение позволяет уменьшить влияние преобразователя частоты на питающую сеть, так как многопульсная (3 кВ - 18-кратная пульсность; 6 кВ - 30-кратная пульсность; 10 кВ - 54-кратная пульсность) схема выпрямления переменного тока формирует более сглаженную характеристику потребляемого тока из сети.
На фиг.3 показан график входного тока в преобразователе частоты на 6 кВ (все 5 силовых блоков включены последовательно), максимальное значение тока 120 А.
Выход преобразователя частоты образуется последовательным сложением нескольких 3-фазных входов и однофазных выходов низкого напряжения. Например, при последовательном сложении 5 силовых блоков, имеющих номинальное выходное напряжение 690 В получаем 3450 В на фазу.
Подключившись к выходам звездой, получаем источник питания для электродвигателя с возможностью изменять частоту. На фиг.5, 6 показаны схемы сложения напряжений для ПЧ 3 и 10 кВ соответственно.
На фиг.7 показаны графики пяти силовых блоков по 690 В АС, соединенных последовательно, и график отдельной фазы. Импульс соседних силовых блоков отстает по времени только на 1/5 интервалов между переключениями транзистора, соединив силовые блоки последовательно, и применив метод сложения на выходе фазы получаем 5-0--5 всего 11 уровней напряжения ШИМ. С увеличением уровней напряжения ШИМ понижается напряжение на каждом уровне и тем самым снижается разрушительное воздействие на изоляцию электродвигателя du/dt, кроме того существенно снижаются колебания напряжения на выходе. На фиг.8 показан график Uab 6 кВ преобразователя частоты с 5 силовыми блоками, пиковое напряжение 8,5 кВ. Поскольку имеется фильтр напряжения, то график тока более важен, на фиг.9 показан график тока Ia, пиковый ток 130 А. Увеличение количества уровня напряжения ШИМ позволило существенно улучшить выходные характеристики преобразователя частоты, график выходного тока практически приближается к синусоиде.
Предлагаемые устройство и способ обеспечивают устранение или существенное уменьшение недостатков указанных в обзоре уровня техники аналогов, в том числе, расширение функциональных возможностей за счет обеспечения промежуточного контроля состояния системы управления с одновременным повышением быстродействия, надежности и упрощения конструкции устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ САМОДИАГНОСТИКИ ВЫСОКОВОЛЬТНОГО ПРЕОБРАЗОВАТЕЛЯ ЧАСТОТЫ | 2013 |
|
RU2548015C2 |
| ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ЭЛЕКТРОПРИВОД С ЭКСТРЕМАЛЬНЫМ РЕЖИМОМ РАБОТЫ | 2013 |
|
RU2540319C2 |
| МНОГОУРОВНЕВЫЙ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ С ДИФФЕРЕНЦИРОВАННЫМИ НАПРЯЖЕНИЯМИ УРОВНЕЙ И БАЙПАСНЫМИ ПОЛУПРОВОДНИКОВЫМИ КЛЮЧАМИ | 2012 |
|
RU2510769C1 |
| Вентильный электропривод | 1989 |
|
SU1746482A1 |
| ИСТОЧНИК ПИТАНИЯ ТОКОМ ОБМОТОК РАЗМАГНИЧИВАНИЯ | 2023 |
|
RU2808773C1 |
| ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕННОГО НАПРЯЖЕНИЯ | 2011 |
|
RU2475922C1 |
| Способ повышения надёжности работы электропривода с многоуровневым инвертором | 2020 |
|
RU2743196C1 |
| СТАТИЧЕСКИЙ МНОГОУРОВНЕВЫЙ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ ДЛЯ ПИТАНИЯ АСИНХРОННЫХ И СИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2005 |
|
RU2303851C1 |
| СТАТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТЫ, НАПРЯЖЕНИЯ И ФАЗЫ | 2006 |
|
RU2311717C1 |
| СТАНЦИЯ УПРАВЛЕНИЯ ПОГРУЖНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2012 |
|
RU2507418C1 |






Предлагаемые устройство и способ относятся к области электротехники и могут быть использованы в частотно-регулируемых приводах с электродвигателями, связанными с исполнительными органами механотронных систем. Сущность технического решения заключается в том, что устройство для управления преобразователем частоты с многоуровневым инвертором напряжения дополнительно содержит три оптоволоконных концентратора, соответствующих рядам силовых блоков по фазам питания электродвигателя, формирователь сигналов состояния выходного напряжения многоуровневого инвертора, сигнальную панель, главную панель управления, блок оперативного контроля работы преобразователя частоты, интерфейс управления, формирователи сигналов управления работой преобразователя частоты и выходном токе многоуровневого инвертора напряжения, а также блок логической обработки сигналов и управления, при этом выходы с каждого ряда силовых блоков фаз питания электродвигателя подключены раздельно к входам формирователя сигналов состояния выходного напряжения многоуровневого инвертора, соответствующие выходы которого подключены ко входам сигнальной панели, другие входы которой подключены, соответственно, к формирователям сигналов управления работой преобразователя частоты и выходном токе многоуровневого инвертора напряжения, а выход - к входу блока оперативного контроля работы преобразователя частоты, связанного соответствующими портами с центральным компьютером управления, интерфейсом управления, главной панелью управления и блоком логической обработки сигналов и управления, причем каждый силовой блок снабжен информационным оптоволоконным разъемом, все силовые блоки рядов, соответствующих фазам питания электродвигателя, подключены своими информационными оптоволоконными разъемами к соответствующим оптоволоконным концентраторам, подключенным к главной панели управления, связанной информационными шинами с сигнальной панелью и блоком логической обработки сигналов и управления, снабженным разъемами для связи с сигналами датчиков технологических параметров и центральным компьютером управления. При этом каждый силовой блок включает в себя встроенный в силовой блок байпасный вентильный мост, управляющий вход которого подведен к информационному оптоволоконному разъему через блок согласования, с которым связаны также затворы транзисторов силового блока. Особенностью способа управления является одновременная подача сигналов на открытие транзисторов в смежных плечах управляемых мостов и управляемые тиристоры байпасных мостов дефектного силового блока и двух других силовых блоков, занимающих такие же по счету от начала соответствующего ряда позиции в рядах последовательно включенных силовых блоков формирования выходных напряжений двух других фаз многоуровневого инвертора напряжений и определение этого момента одновременной подачи сигналов на основании сравнения информационных сигналов с выхода каждого ряда силовых блоков и соответствующих им информационных сигналов с каждого соответствующего этим рядам оптоволоконного концентратора. Предлагаемые устройство и способ обеспечивают технический результат - устранение или существенное уменьшение недостатков, указанных в обзоре уровня техники аналогов, в том числе расширение функциональных возможностей за счет обеспечения промежуточного контроля состояния системы управления с одновременным повышением быстродействия, надежности и упрощения конструкции устройства. 2 с. и 1 з.п. ф-лы, 9 ил., 1 табл.
| Железобетонная полая балка для междуэтажных перекрытий | 1928 |
|
SU12304A1 |
| Регулируемый преобразователь частоты | 1985 |
|
SU1319195A1 |
| US 5625545 A, 29.04.1997. | |||

