Изобретение относится к области машиностроения, в частности к шарнирным соединениям, и преимущественно может быть использовано в развертываемых стержневых конструкциях каркасов параболических антенных рефлекторов, применяемых, например, в космической технике.
Известны шарнирные соединения трансформируемого каркаса рефлектора развертываемой антенны (RU 2084994 С1, 1997, фиг.5, 7), трансформируемой конструкции (RU 2167789 С1, 2001, фиг.1, поз.13, 14) и развертываемого крупногабаритного космического рефлектора (RU 2214659 С2, 2003, фиг.4, поз.10, фиг.7, поз.11), которые в общей для них части содержат корпус, установленную на корпусе вилку с осью и стержневой элемент с проушиной, охватываемой вилкой и установленной на оси с возможностью поворота.
Отсутствие в конструкциях этих шарнирных соединений упругих элементов, силы упругости которых могли бы быть использованы для развертывания трансформируемых конструкций, приводит к тому, что развертывание конструкций осуществляют силами космонавтов или с помощью предназначенных для этого приводов.
Наиболее близким по конструкции к настоящему изобретению является шарнирное соединение раскрывающегося сферического отражателя излучения (RU 2396649 С1, 2010, фиг.4 и 5), которое служит для соединения двух стержневых элементов меридианных ребер. Шарнирное соединение, являющееся ближайшим аналогом, содержит корпус с двумя петлями, каждая из которых образована установленной на корпусе осью и вилкой, установленной на оси с возможностью поворота относительно корпуса, и установленные на вилках два полых стержневых элемента, причем каждая вилка подпружинена относительно корпуса пружиной кручения, размещенной на оси и охватываемой вилкой.
В результате складывания раскрывающегося сферического отражателя излучения при подготовке его к запуску пружины каждого шарнирного соединения, являющегося ближайшим аналогом, скручиваются, что позволяет использовать их силы упругости для последующего развертывания отражателя на орбите и поэтому не требует применения привода.
Вместе с тем, недостаток шарнирного соединения, являющегося ближайшим аналогом, заключается в том, что значение момента, создаваемого силой упругости пружины кручения и обеспечивающего раскрытие, конструкции, оказывается существенно ограниченным, что обусловлено возможностью использования в этом шарнирном соединении только пружины кручения и ограничениями, накладываемыми на размеры используемой пружины размерами охватывающей ее вилки.
Задачей настоящего изобретения является повышение моментов сил, создаваемых пружинами шарнирного соединения.
Поставленная задача решена, согласно настоящему изобретению, тем, что развертывающееся шарнирное соединение, содержащее, в соответствии с ближайшим аналогом, корпус с двумя осями и два полых стержневых элемента, каждый из которых установлен на оси с возможностью поворота и подпружинен относительно корпуса пружиной, отличается от ближайшего аналога тем, что каждый стержневой элемент снабжен гибкой тягой, расположенной в его полости, корпус снабжен двумя профилированными элементами с выпуклой поверхностью, каждая из которых обращена к стержневому элементу и размещена между осью и стержневым элементом, пружина выполнена в виде пружины сжатия и установлена в полости стержневого элемента с возможностью взаимодействия одним концом со стержневым элементом, а другим концом с концом гибкой тяги, расположенным внутри стержневого элемента, причем выступающая из стержневого элемента часть каждой гибкой тяги размещена на выпуклой поверхности профилированного элемента и прикреплена своим концом к корпусу.
При этом гибкая тяга расположена внутри пружины.
Гибкая тяга выполнена в виде металлического тросика.
Полый стержневой элемент установлен на оси с помощью вилки, охватывающей корпус со стороны расположения выпуклой поверхности профилированного элемента и снабженной полым наконечником, вставленным в стержневой элемент и зафиксированным в нем, а один конец пружины установлен с возможностью взаимодействия с торцом наконечника.
Длина гибкой тяги между точками ее крепления выбрана обеспечивающей величину деформации Δхразв пружины при развернутом шарнирном соединении, равную (1,0-1,2)Мразв/(СRразв), где Мразв - заданный момент силы упругости пружины относительно оси поворота стержневого элемента при развернутом шарнирном соединении; С - жесткость пружины; Rразв - расстояние от оси поворота стержневого элемента до точки касания гибкой тягой выпуклой поверхности профилированного элемента при развернутом шарнирном соединении.
Выпуклая поверхность профилированного элемента выбрана обеспечивающей длину размещенного на ней при свернутом шарнирном соединении участка гибкой тяги между точками касания гибкой тягой выпуклой поверхности при развернутом и свернутом шарнирном соединении, равную (1,0-1,2)Мсверн/(СRсверн)-Δхразв, где Мсверн - заданный момент силы упругости пружины относительно оси поворота стержневого элемента при свернутом шарнирном соединении; Rсверн - расстояние от оси поворота стержневого элемента до точки касания гибкой тягой выпуклой поверхности при свернутом шарнирном соединении.
Снабжение каждого стержневого элемента развертывающегося шарнирного соединения гибкой тягой, расположенной в его полости, выполнение пружины в виде пружины сжатия и размещение ее в полости стержневого элемента с возможностью взаимодействия одним концом со стержневым элементом, а другим концом с концом гибкой тяги, расположенным внутри стержневого элемента, позволяет использовать в конструкции развертывающегося шарнирного соединения пружину сжатия, возможная длина которой, в принципе, ограничена только длиной полого стержневого элемента и которая поэтому дает возможность возникновения при ее деформации большей силы упругости, чем в ближайшем аналоге. При этом снабжение корпуса развертывающегося шарнирного соединения двумя профилированными элементами с выпуклой поверхностью, каждая из которых обращена к стержневому элементу и размещена между осью и стержневым элементом, а также размещение выступающей из стержневого элемента части каждой гибкой тяги на выпуклой поверхности профилированного элемента и прикрепление ее своим концом к корпусу обеспечивает возникновение плеч сил упругости пружин относительно осей, в результате чего возникают моменты сил упругости пружин относительно осей, значения которых оказываются большими по сравнению с ближайшим аналогом.
Отмеченное свидетельствует о решении декларированной выше задачи настоящего изобретения благодаря наличию у развертывающегося шарнирного соединения перечисленных выше отличительных признаков.
На фиг.1 показан внешний вид развертывающегося шарнирного соединения при его развернутом положении, причем один стержневой элемент и часть корпуса показаны в разрезе, а штриховыми линиями показано расположение элементов при свернутом положении развертывающегося шарнирного соединения, где 1 - корпус, 2 -стержневой элемент, 3 - вилка, 4 - ось, 5 - винт, 6 - заклепка, 7 - гибкая тяга, 8 -пружина, 9 - паз корпуса, 10 - первая втулка, 11 - вторая втулка, 12 - наконечник, 13 - профилированный элемент и 14 - опорная поверхность.
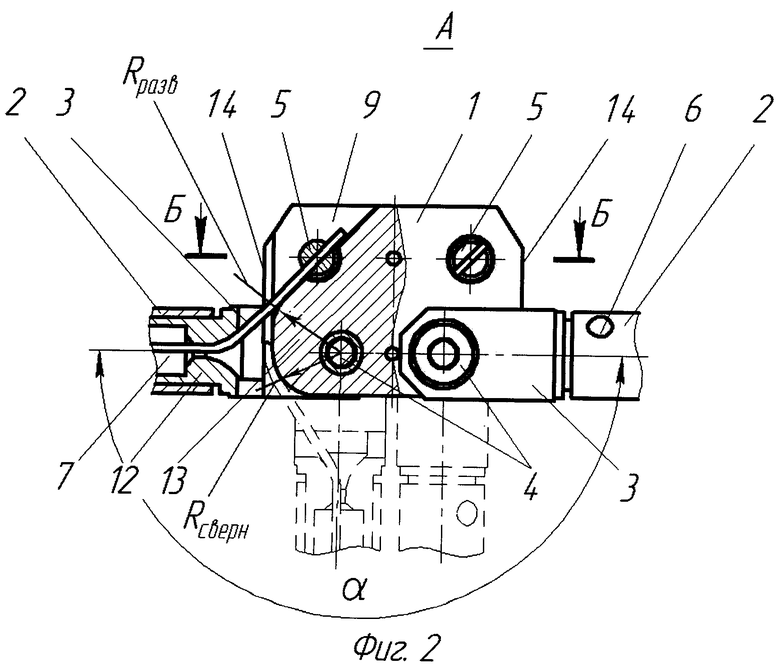
На фиг.2 показан вид А фиг.1 (увеличено).
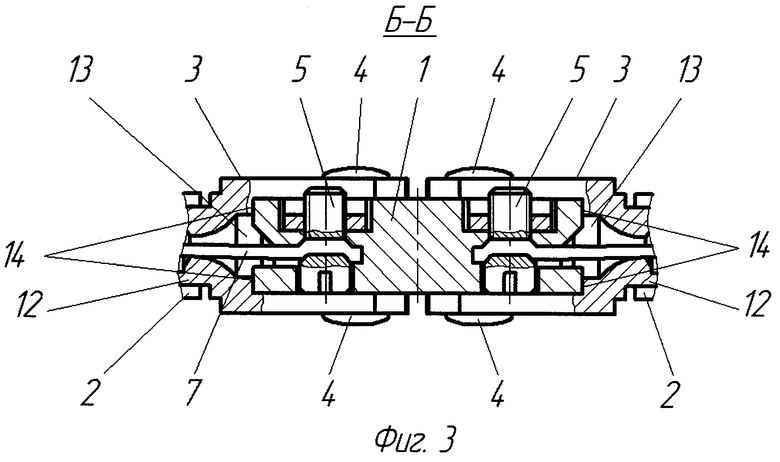
На фиг.3 показан разрез по Б-Б фиг.2.
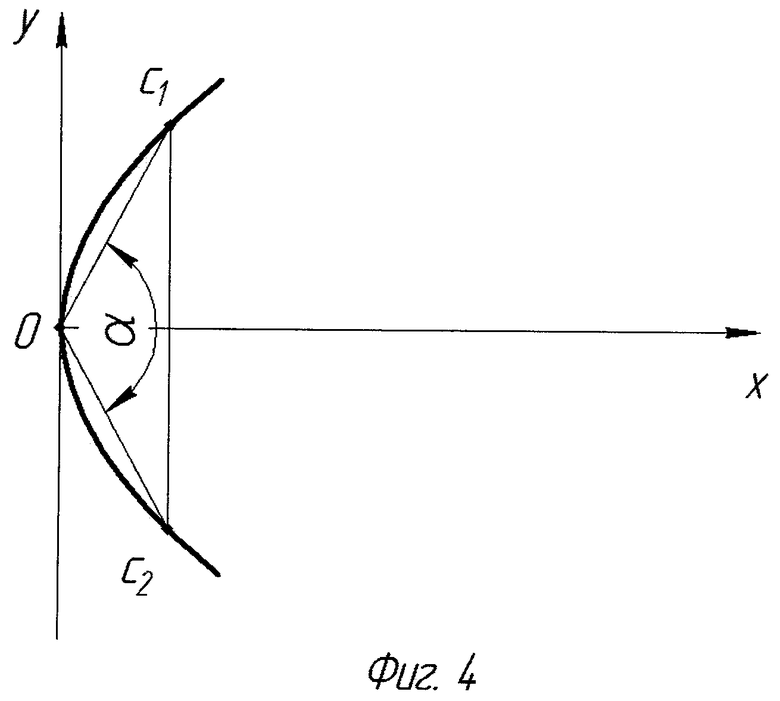
На фиг.4 приведен чертеж, который поясняет выбор значения угла α (см. фиг.1 и 2) между осями стержневых элементов 2 при развернутом положении развертывающегося шарнирного соединения для случая использования его в составе каркаса параболического рефлектора.
Развертывающееся шарнирное соединение преимущественно может быть использовано в развертываемых стержневых конструкциях каркасов крупногабаритных параболических антенных рефлекторов, применяемых, например, в космической технике.
Развертывающееся шарнирное соединение содержит металлические корпус 1 и две вилки 3 с полыми цилиндрическими наконечниками 12, которые охватывают корпус 1 и установлены на осях 4 с возможностью поворота относительно корпуса 1. Концы осей 4, выступающие из вилок 3, развальцованы. Шарнирное соединение содержит два полых стержневых элемента 2, которые выполнены из металла или полимерного материала, например, в форме цилиндра, установлены на цилиндрических наконечниках 12 вилок 3 и закреплены с помощью заклепок 6.
Внутри каждого стержневого элемента 2 установлена пружина 8 сжатия, которая упирается одним концом через вторую втулку 11, в которой выполнено отверстие, в торец цилиндрического наконечника 12 вилки 3. Шарнирное соединение также содержит две гибкие тяги 7, которые выполнены, например, в виде металлических тросиков. Каждая гибкая тяга 7 расположена внутри соответствующих стержневого элемента 2 и пружины 8, протянута через отверстия первой и второй втулок 10 и 11, а также через полость и отверстие цилиндрического наконечника 12 вилки 3 и взаимодействует с другим концом пружины 8 через первую втулку 10. Для этого один конец (левый на разрезе фиг.1) каждой гибкой тяги 7 продольно зафиксирован относительно первой втулки 10, например, с помощью узла.
Корпус 1 снабжен двумя профилированными элементами 13 с выпуклой поверхностью, обращенной к стержневому элементу 2 и размещенной между осью 4 и стержневым элементом 2. В результате этого каждая вилка 3, на наконечнике 12 которой установлен стержневой элемент 2, охватывает корпус 1 со стороны расположения выпуклой поверхности соответствующего профилированного элемента 13. Профилированные элементы 13 получены путем выполнения в корпусе 1 вертикального (по расположению на фиг.1 и 2) паза 9 корпуса.
Выступающие из стержневых элементов 2 части каждой гибкой тяги 7 размещены на выпуклой поверхности соответствующего профилированного элемента 13 и прикреплены своим концом к корпусу 1 с помощью винтов 5 так, чтобы длина каждой гибкой тяги 7 между точками ее крепления обеспечивала величину деформации Δxразв каждой пружины 8 при развернутом шарнирном соединении, равную (1,0-1,2)Мразв/(СRразв), где Мразв - заданный момент силы упругости пружины 8 относительно оси поворота стержневого элемента 2 при развернутом шарнирном соединении; С -жесткость пружины 8; Rразв - расстояние (см. фиг.2) от оси поворота стержневого элемента 2 до точки касания гибкой тягой 7 выпуклой поверхности профилированного элемента 13 при развернутом шарнирном соединении. В результате этого при развернутом шарнирном соединении обеспечиваются приложенные относительно осей поворота каждого стержневого элемента 2 моменты сил упругости пружин 8, величины которых не меньше заданного значения момента Мразв и которые препятствуют повороту стержневых элементов 2 в этом состоянии.
Выпуклая поверхность каждого профилированного элемента 13 выбрана обеспечивающей длину размещенного на ней при свернутом шарнирном соединении участка гибкой тяги 7 между точками касания гибкой тягой 7 выпуклой поверхности профилированного элемента 13 при развернутом и свернутом шарнирном соединении, равную (1,0-1,2)Мсверн/(СRсверн)-Δxразв, где Мсверн - заданный момент силы упругости пружины 8 относительно оси поворота стержневого элемента 2 при свернутом шарнирном соединении; Rсверн - расстояние (см. фиг.2) от оси поворота стержневого элемента 2 до точки касания гибкой тягой 7 выпуклой поверхности при свернутом шарнирном соединении. Такой выбор выпуклой поверхности каждого профилированного элемента 13 обеспечивает при свернутом шарнирном соединении возникновение приложенных относительно осей поворота каждого стержневого элемента 2 моментов сил упругости пружин 8, величины которых не меньше заданного значения момента Мсверн и которые обеспечивают поворот стержневых элементов 2 относительно осей 4 при начале развертывания шарнирного соединения.
Так, например, в частном случае выполнения выпуклых поверхностей профилированных элементов 13 в форме части цилиндрической поверхности, ось которой совпадает с осью поворота стержневого элемента 2 относительно соответствующей оси 4, расстояния Rразв и Rсверн оказываются равными радиусу R этой цилиндрической поверхности, значение которого выбирают в соответствии с неравенством ((Мсверн-1,2Мразв)/Сφ))1/2≤R≤((1,2Мсверн-Мразв)/(Сφ))1/2, где φ - угол поворота стержневого элемента 2 при развертывании шарнирного соединения, равный, например, π/2 или незначительно меньший этого значения (см. ниже), как показано на фиг.1 и 2.
Как отмечалось выше, заявляемое развертывающееся шарнирное соединение преимущественно может быть использовано в развертываемых стержневых конструкциях каркасов крупногабаритных антенных рефлекторов, имеющих, например, параболическую форму. В этом случае антенный рефлектор содержит стержневой каркас отражающей поверхности и стержневой каркас тыльной поверхности, каждый из которых образован за счет соединения центральными шарнирными узлами формообразующих стержней этих поверхностей, причем каждый формообразующий стержень выполнен из двух частей, соединенных шарнирами с пружинами в качестве элементов раскладывания. Заявляемое развертывающееся шарнирное соединение и предназначено для использования в качестве формообразующих стержней каркасов отражающей и тыльной поверхностей. В этом случае концы стержневых элементов 2 шарнирно присоединены к центральным шарнирным узлам каркасов отражающей и тыльной поверхностей. Такой антенный рефлектор также содержит диагональные стержни, которые соединяют центральные шарнирные узлы каркаса отражающей поверхности и каркаса тыльной поверхности, в результате чего в развернутом состоянии образуются ячейки в форме тетраэдра. Кроме того, антенный рефлектор содержит сетеполотно из металлических нитей, которое натянуто на каркас отражающей поверхности и выполняет функцию отражателя радиоизлучения. Сетеполотно прикреплено к каркасу отражающей поверхности с помощью нитей, обвязанных вокруг формообразующих стержней каркаса отражающей поверхности, то есть вокруг стержневых элементов 2 заявляемого развертывающегося шарнирного соединения.
В результате этого на практике форма сетеполотна, расположенного на каркасе отражающей поверхности, оказывается отличной от идеальной поверхности второго порядка и имеет вид поверхности, которая составлена из треугольников, являющихся гранями тетраэдров, составляющих каркас рефлектора.
Поэтому достижимая точность приближения рабочей отражающей поверхности сетеполотна к идеальной поверхности второго порядка, например, к параболоиду, которая является одним из основных требований, предъявляемых к развертываемым антенным рефлекторам, ограничена длиной формообразующих стержней каркаса отражающей поверхности.
В случае использования в качестве формообразующих стержней каркасов отражающей и тыльной поверхностей являющегося ближайшим аналогом шарнирного соединения, когда в развернутом его положении оси стержневых элементов совпадают, образуя развернутый угол 180°, длина формообразующих стержней определяется суммой длин двух стержневых элементов, продольных размеров вилок и расстояния между осями корпуса.
В отличие от ближайшего аналога конструкцией заявляемого развертывающегося шарнирного соединения предусмотрено, чтобы в развернутом его состоянии угол α между осями стержневых элементов 2 был равен не 180°, а имел несколько меньшее значение. Значение этого угла α выбирают таким, которое обеспечивает расположение центра нижней грани (по расположению на фиг.1 и 2) корпуса 1 на поверхности второго порядка, форму которой необходимо воспроизвести сетеполотном с минимально возможной погрешностью.
Для этого корпус 1 заявляемого развертывающегося шарнирного соединения снабжен расположенными на противоположных боковых сторонах корпуса 1 двумя опорными поверхностями 14, каждая из которых выполнена с возможностью взаимодействия при развернутом шарнирном соединении с соответствующим стержневым элементом 2 через его вилку 3 и наконечник 12.
Выбор значения угла α для случая использования заявляемого развертывающегося шарнирного соединения в составе каркаса параболического рефлектора поясняется фиг.4, на которой в системе координат ХОY показана парабола, являющаяся сечением параболоида плоскостью его симметрии, и стержневые элементы 2 развертывающегося шарнирного соединения, находящегося в этой плоскости. Точкой О обозначен центр нижней грани (по расположению на фиг.1 и 2) корпуса 1, а точками C1 и С2 - центры двух ближайших центральных шарнирных узлов, которые соединены заявляемым развертывающимся шарнирным соединением.
Из аналитической геометрии известно, что уравнение параболы имеет вид: y2=4fх, где f - фокусное расстояние, откуда следует, что х=y2/(4f). Поэтому из верхнего прямоугольного треугольника (см. фиг.4) следует, что угол α/2=arctg(y/x)=arctg(4f/y). Поскольку угол α близок к 180°, на практике с относительной погрешностью не более 0,05% можно принять, что у≈С1O. Производя замену, можно получить, что угол α=2arctg(4f/C1O).
Естественно, что по мере удаления от центра рефлектора из-за уменьшения кривизны параболоида угол α будет увеличиваться. Однако для реальных конструкций крупногабаритных рефлекторов изменения угла α будут незначительными. Так, для параболического рефлектора с диаметром 12 м и фокусным расстоянием 5 м увеличение угла α на периферии рефлектора по сравнению с центром составляет всего 0,36%.
Например, у развертывающихся шарнирных соединений, являющихся предметом настоящего изобретения и использованных в конструкции созданного авторами опытного образца параболического рефлектора с диаметром 12 м, фокусным расстоянием 5 м и длиной формообразующего стержня отражающей поверхности, равной 80 см, значение угла α было выбрано от значения 177° 45' для развертывающихся шарнирных соединений, установленных в центре каркаса рефлектора, до значения 178° 31' для развертывающихся шарнирных соединений, установленных на его периферии. В результате этого было обеспечено среднее квадратическое отклонение профиля сетеполотна отражающей поверхности от параболической формы, не превышающее 0,67 мм.
На практике в зависимости от требований к точности воспроизведения параболической поверхности сетеполотном отражающей поверхности, предъявляемых к развертываемым антенным рефлекторам, угол α выбирают в пределах от 1,8arctg(4f/L) до 2,2arctg(4f/L), где L - расстояние между центром нижней грани корпуса 1 и центром центрального шарнирного узла, к которому прикреплен конец стержневого элемента 2.
При сборке развертывающегося шарнирного соединения пружину 8 с пропущенной через нее гибкой тягой 7 и с надетыми на гибкую тягу 7 первой и второй втулками 10 и 11 вставляют внутрь стержневого элемента 2, пропускают гибкую тягу 7 через отверстие полости цилиндрического наконечника 12 вилки 3, вставляют цилиндрический наконечник 12 вилки 3 в стержневой элемент 2 и фиксируют с помощью заклепок 6. Затем устанавливают вилку 3 на оси 4 корпуса 1 при положении стержневого элемента 2, в котором вилка 3 корпуса 1 упирается в опорную поверхность 14, и прикрепляют гибкую тягу 7 к корпусу 1 с помощью винта 5 так, чтобы пружина 8 была сжата с обеспечением ее деформации, равной Δхразв, чем при дальнейшем использовании развертывающегося шарнирного соединения обеспечивается фиксация стержневого элемента 2 в этом его положении относительно корпуса 1 приложенным относительно оси поворота стержневого элемента 2 моментом силы упругости пружины 8, величина которого не меньше заданного значения момента Мразв.
При использовании развертывающегося шарнирного соединения в составе развертываемой стержневой конструкции последняя устанавливается на космический аппарат и выводится вместе с ним на орбиту в свернутом положении, когда стержневые элементы 2 занимают вертикальное положение (по расположению на фиг.1 и 2), показанное штриховыми линиями. В результате такого свертывания стержневой конструкции и перевода стержневых элементов 2 в вертикальное положение выступающие из стержневых элементов 2 части гибких тяг 7, размещенные на выпуклых поверхностях профилированных элементов 13 и прикрепленные одними своими концами к корпусу 1 винтами 5, взаимодействуют с этими выпуклыми поверхностями, а другими своими концами через первые втулки 10 взаимодействуют с пружинами 8 и еще более их сжимают.
После вывода космического аппарата на орбиту, когда фиксирующие элементы освобождают свернутую стержневую конструкцию, в результате действия сил упругости пружин 8 вдоль гибких тяг 7 и наличия плеч этих сил относительно осей 4, равных Rсверн (см. фиг.2), возникают моменты сил упругости пружин 8, которыми вилки 3 со стержневыми элементами 2 поворачиваются относительно корпуса 1 на осях 4 в развернутое положение (близкое к горизонтальному по расположению на фиг.1 и 2) до упора вилок 3 в опорные поверхности 14 корпуса 1.
В итоге стержневая конструкция в целом переходит в развернутое положение, причем силы упругости пружин 8, находящихся при развернутом положении конструкции в сжатом состоянии, характеризуемом величиной деформации Δхразв, из-за наличия плеч этих сил относительно осей 4, равных Rразв (см. фиг.2), создает относительно осей 4 моменты сил, которые обеспечивают прижатие вилок 3 к опорным поверхностям 14 корпуса 1 и препятствуют повороту относительно корпуса 1 вилок 3 со стержневыми элементами 2, обеспечивая жесткость стержневой конструкции.
Таким образом, изобретение обеспечивает повышение моментов сил, создаваемых пружинами развертывающегося шарнирного соединения.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАЗВЕРТЫВАЮЩИЙСЯ КАРКАС РЕФЛЕКТОРА | 2011 |
|
RU2480386C2 |
| РАЗВЕРТЫВАЕМЫЙ КРУПНОГАБАРИТНЫЙ КОСМИЧЕСКИЙ РЕФЛЕКТОР | 2001 |
|
RU2214659C2 |
| РАЗВЕРТЫВАЕМЫЙ КРУПНОГАБАРИТНЫЙ КОСМИЧЕСКИЙ РЕФЛЕКТОР И СПОСОБ ЕГО НАЗЕМНОЙ ОТРАБОТКИ | 2010 |
|
RU2442249C1 |
| РЕФЛЕКТОР РАЗВЕРТЫВАЕМОЙ АНТЕННЫ | 2008 |
|
RU2356141C1 |
| РАЗВЕРТЫВАЕМЫЙ КРУПНОГАБАРИТНЫЙ РЕФЛЕКТОР КОСМИЧЕСКОГО АППАРАТА | 2007 |
|
RU2350519C1 |
| ЗОНТИЧНАЯ АНТЕННА КОСМИЧЕСКОГО АППАРАТА | 2015 |
|
RU2659761C2 |
| РАЗВЕРТЫВАЕМЫЙ КРУПНОГАБАРИТНЫЙ КОСМИЧЕСКИЙ РЕФЛЕКТОР | 2004 |
|
RU2266592C1 |
| ПРИВОД ШАРНИРНОГО СОЕДИНЕНИЯ ДЛЯ РАЗВОРАЧИВАНИЯ СОЛНЕЧНЫХ БАТАРЕЙ ИЛИ АНТЕНН КОСМИЧЕСКОГО АППАРАТА | 2017 |
|
RU2708778C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ РАЗВЕРТЫВАЕМОГО КРУПНОГАБАРИТНОГО РЕФЛЕКТОРА КОСМИЧЕСКОГО АППАРАТА | 2007 |
|
RU2350518C1 |
| УСТРОЙСТВО ТРАНСФОРМИРОВАНИЯ КОНСТРУКЦИЙ КОСМИЧЕСКОГО АППАРАТА | 2021 |
|
RU2765323C1 |
Изобретение относится к области машиностроения, в частности к шарнирным соединениям, и преимущественно может быть использовано в развертываемых стержневых конструкциях каркасов параболических антенных рефлекторов, применяемых, например, в космической технике. Соединение содержит корпус (1) с двумя осями (4) и два полых стержневых элемента (2), каждый из которых установлен на оси (4) с возможностью поворота и подпружинен относительно корпуса пружиной (8). Каждый элемент (2) снабжен гибкой тягой (7), расположенной в его полости, а корпус (1) снабжен двумя профилированными элементами (13) с выпуклой поверхностью, каждая из которых обращена к элементу (2) и размещена между осью (4) и элементом (2). Пружина (8) выполнена в виде пружины сжатия и установлена в полости элемента (2) с возможностью взаимодействия одним концом с элементом (2), а другим концом с концом тяги (7), расположенным внутри элемента (2). Выступающая из элемента (2) часть каждой тяги (7) размещена на выпуклой поверхности элемента (13) и прикреплена своим концом к корпусу (1). Технический результат: повышение моментов сил, создаваемых пружинами шарнирного соединения. 5 з.п. ф-лы, 4 ил.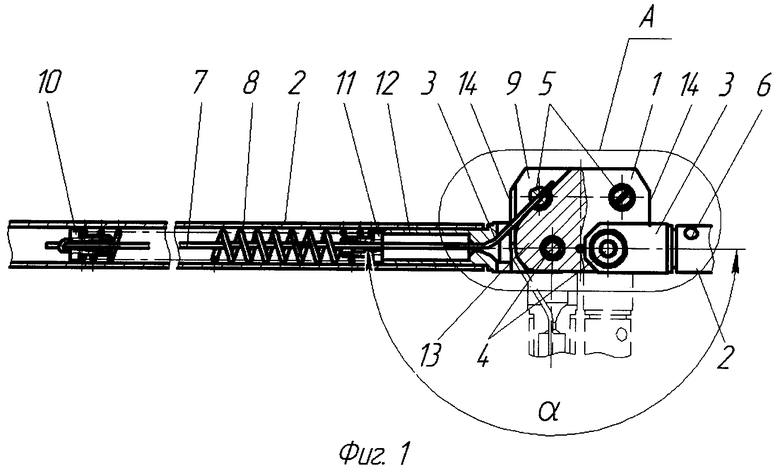
1. Развертывающееся шарнирное соединение, содержащее корпус с двумя осями и два полых стержневых элемента, каждый из которых установлен на оси с возможностью поворота и подпружинен относительно корпуса пружиной, отличающееся тем, что каждый полый стержневой элемент снабжен гибкой тягой, расположенной в его полости, корпус снабжен двумя профилированными элементами с выпуклой поверхностью, каждая из которых обращена к полому стержневому элементу и размещена между осью и полым стержневым элементом, пружина выполнена в виде пружины сжатия и установлена в полости полого стержневого элемента с возможностью взаимодействия одним концом с полым стержневым элементом, а другим концом - с концом гибкой тяги, расположенным внутри полого стержневого элемента, причем выступающая из полого стержневого элемента часть каждой гибкой тяги размещена на выпуклой поверхности профилированного элемента и прикреплена своим концом к корпусу.
2. Соединение по п.1, отличающееся тем, что гибкая тяга расположена внутри пружины.
3. Соединение по п.1, отличающееся тем, что гибкая тяга выполнена в виде металлического тросика.
4. Соединение по п.1, отличающееся тем, что полый стержневой элемент установлен на оси с помощью вилки, охватывающей корпус со стороны расположения выпуклой поверхности профилированного элемента и снабженной полым наконечником, вставленным в полый стержневой элемент и зафиксированным в нем, а один конец пружины установлен с возможностью взаимодействия с торцом полого наконечника.
5. Соединение по п.1, отличающееся тем, что длина гибкой тяги между точками ее крепления выбрана обеспечивающей величину деформации Δxразв пружины при развернутом шарнирном соединении, равную (1,0-1,2)Мразв/(СRразв), где Мразв - заданный момент силы упругости пружины относительно оси поворота полого стержневого элемента при развернутом шарнирном соединении; С - жесткость пружины; Rразв - расстояние от оси поворота полого стержневого элемента до точки касания гибкой тягой выпуклой поверхности профилированного элемента при развернутом шарнирном соединении.
6. Соединение по п.1 или 5, отличающееся тем, что выпуклая поверхность профилированного элемента выбрана обеспечивающей длину размещенного на ней при свернутом шарнирном соединении участка гибкой тяги между точками касания гибкой тягой выпуклой поверхности при развернутом и свернутом шарнирном соединении, равную (1,0-1,2)Мсверн/(СRсверн)-Δхразв, где Мсверн - заданный момент силы упругости пружины относительно оси поворота полого стержневого элемента при свернутом шарнирном соединении; Rсверн - расстояние от оси поворота полого стержневого элемента до точки касания гибкой тягой выпуклой поверхности при свернутом шарнирном соединении.
| РАСКРЫВАЮЩИЙСЯ СФЕРИЧЕСКИЙ ОТРАЖАТЕЛЬ ИЗЛУЧЕНИЯ | 2009 |
|
RU2396649C1 |
| Способ сверх сенсибилизации фотографических галоидосеребряных эмульсий | 1950 |
|
SU94767A1 |
| РЕФЛЕКТОР РАЗВЕРТЫВАЕМОЙ АНТЕННЫ, ЕГО ТРАНСФОРМИРУЕМЫЙ КАРКАС, МЕХАНИЗМ РАЗВЕРТЫВАНИЯ И МЕХАНИЗМ ФИКСАЦИИ | 1994 |
|
RU2084994C1 |
| US 5911536 A, 15.06.1999. | |||

