Изобретение относится к снаряжению водолаза и может быть использовано как элемент в составе средств связи, управления и контроля при выполнении подводно-технических работ, при действиях, относящихся к военной сфере, при аварийных ситуациях, а также аквалангистами-любителями.
При нахождении в водной среде на расстоянии в десятки и сотни метров от обеспечивающего надводного судна единственным средством связи водолаза является связь по гидроакустическому каналу. Одним из важнейших элементов этой связи является система, дающая возможность водолазу определить направление на источник гидроакустического (звукового) сигнала. Источником такого сигнала может быть сигнал излучения с судна обеспечителя, от специального гидроакустического маяка или от другого водолаза при групповых действиях. Определение направление на источник звукового сигнала реализуется с помощью гидроакустического пеленгатора водолаза, который входит в состав его снаряжения.
К пеленгатору водолаза предъявляются два основных требования.
Пеленгатор должен полностью, со всеми составляющими частями, интегрироваться в носимое водолазом снаряжение, не создавая дополнительных неудобств при выполнении работ.
Точность определения направления на источник звукового сигнала должна быть достаточной для однозначного выбора этого направления и составлять величину 15-20° [1].
Пеленгатор должен работать в диапазоне частот, соответствующем диапазону частот сигналов, используемых водолазами - 8-35 кГц.
Для создания характеристики направленности (ХН), обеспечивающей необходимую точность пеленгования, размер раскрыва акустической антенны должен составлять примерно (2÷3)λ (λ - длина волны рабочей частоты пеленгуемого сигнала), т.е. для указанных выше частот от 9 см (f=35 кГц) до 37,5 см (f=8 кГц). Даже если удастся разместить антенну необходимого размера на теле водолаза, осуществить пеленгование в двух плоскостях будет затруднительно.
Известны способы и устройства, которые частично решают задачи пеленгования для водолазов.
В устройстве по патенту США [2] система водолазного снаряжения, решающая задачи навигации, размещается на шлеме и имеет радиоэлектронные и компьютерные средства, включая дисплей, на который выводятся данные, необходимые водолазу, при этом водолаз может определить свое местоположение относительно источников сигнала только при наличии внешней системы на обеспечивающем судне. А эта система, в свою очередь, должна иметь точные данные о местоположении водолаза.
В патенте США [3] на шлеме водолаза устанавливается несколько приемников, составляющих фазированную антенную решетку (ФАР). Расположение ФАР с необходимой направленностью в пределах шлема вряд ли возможно для работы на частотах ниже 15 кГц. Кроме того, с помощью линейной ФАР можно обеспечить направленность только в одной плоскости, а многоканальная система обработки значительно усложняется.
В устройстве [4] предлагается реализовать корреляционную обработку сигналов от двух антенн, но ХН формируется только в горизонтальной плоскости, а в вертикальной плоскости система является ненаправленной.
Наиболее близким по техническим и функциональным характеристикам к предлагаемым устройству и способу является «Устройство и способ определения водолазом направления на источник звукового сигнала» по заявке [5]. Это устройство, а также способ пеленгования с помощью указанного устройства приняты за прототип.
Устройство-прототип содержит две ненаправленные антенны, центры которых размещены на расстоянии четверти длины волны несущей частоты принимаемого сигнала, тракт прослушивания принимаемых сигналов, включающий последовательно соединенные первую антенну, усилитель с автоматической регулировкой усиления (АРУ) и головной телефон, а также тракт формирования управляющего напряжения для усилителя с АРУ. Тракт формирования управляющего напряжения для усилителя с АРУ состоит из блока задержки на время, равное четверти периода несущей частоты принимаемого сигнала, и сумматора. Выход первой антенны, соединенный с сигнальным входом усилителя с АРУ, также подключен к первому входу сумматора. Выход второй антенны подключен к входу блока задержки, а выход устройства задержки подключен ко второму входу сумматора. Выход сумматора подключен к управляющему входу усилителя с АРУ, а коэффициент усиления усилителя с АРУ обратно пропорционален уровню управляющего сигнала.
Коэффициент усиления усилителя с АРУ становится максимальным, когда разность фаз сигналов, поступающих на сумматор, составляет 180°, при этом уровень сигнала в головном телефоне становится максимальным. Такая разность фаз достигается в случае, когда источник сигнала расположен на линии, соединяющей центры антенн, со стороны первой антенны.
Способ-прототип определения водолазом направления на источник тонального звукового сигнала (ИТЗС) состоит в регистрации водолазом уровня сигнала, основанном на приеме сигнала ИТЗС двумя ненаправленными антеннами, разнесенными на расстояние, равное четверти длины волны несущей частоты, задержки сигнала со второй антенны на время, равное четверти периода несущей частоты принимаемого сигнала, суммировании задержанного сигнала с сигналом с выхода первой антенны. Для принятия решения о направлении на ИТЗС используют сигнал, принимаемый первой антенной, причем уровень этого сигнала изменяют обратно пропорционально значению уровня суммарного сигнала, изменяют пространственное положение условной линии, соединяющей центры антенн изменением в пространстве положения водолаза до достижения максимального значения уровня регистрируемого водолазом сигнала. Определяют направление на ИТЗС как направление вектора от точки расположения второй антенны к точке расположения первой антенны.
Устройство и способ-прототип позволяют определять направление на ИТЗС как в горизонтальной, так и в вертикальной плоскостях. Данному устройству не требуется для работы наличие судна обеспечителя.
Информацию о направлении на ИТЗС водолаз получает, оценивая изменения уровня громкости сигнала при изменении пространственного положения линии, соединяющей центры антенн. Точная оценка максимального уровня сигнала водолазом в реальных условиях может быть осложнена наличием помехи.
Устройство-прототип и способ-прототип [5] имеют ряд недостатков.
В условиях проведения подводных работ водолазу может быть затруднительно точно определять изменение уровня сигнала в головном телефоне, что может приводить к увеличению ошибки пеленгования
Наличие помехи может приводить к изменению уровня сигнала, приходящего с одного направления, что также уменьшает точность пеленгования.
При использовании данного устройства водолаз не имеет информации о том, насколько он приблизился к искомому направлению.
Задачей изобретения является повышение точности пеленгования ИТЗС и получение информации в удобной для водолаза форме.
Техническим результатом предлагаемого устройства и способа его использования является следующее.
Предоставление водолазу информации о местоположении источника звукового сигнала в форме человеческой речи.
Уменьшение влияние помехи на точность пеленгования.
Получение водолазом речевого оповещения о численном значении угла отклонения.
Для достижения заявляемого технического результата в устройство определения водолазом направления на источник тонального звукового сигнала (ИТЗС), содержащее две ненаправленные антенны, расположенные на расстоянии четверти длины волны несущей частоты принимаемого сигнала на шлеме водолаза на линии от носа к затылку, причем первая антенна находится со стороны носа, блок задержки и головной телефон, введены новые следующие признаки:
блок задержки (БЗ) выполнен с возможностью дискретной задержки сигнала на время τ=Т/4÷3Т/4, где Т - период несущей частоты принимаемого сигнала, причем количество дискрет определяется заданной точностью пеленгования;
дополнительно введены коммутатор, блок управления БЗ, блок синхронизации, блок обнаружения сигнала, тумблер запуска, а также последовательно соединенные аналого-цифровой преобразователь (АЦП), первый блок памяти, блок вычисления Uэфф, блок вычисления 1/Uэфф, второй блок памяти, блок выбора максимального значения, блок управления, блок памяти «память слов» и цифроаналоговый преобразователь (ЦАП);
выход первой антенны соединен с входом блока обнаружения сигнала, выход которого соединен с входом головного телефона;
выход блока задержки соединен с сигнальным входом коммутатора, а его выход - со вторым входом сумматора, выход сумматора соединен с входом АЦП;
тумблер запуска соединен со вторым входом блока управления, второй выход которого соединен со входом блока синхронизации, первый выход которого соединен с блоком управления Б3, второй выход - со вторым входом первого блока памяти, третий выход - со вторым входом второго блока памяти, а четвертый выход - со вторым входом блока выбора максимального значения;
выход блока управления БЗ соединен с входом управления коммутатора;
выход ЦАП соединен с входом телефона;
целесообразно, чтобы блок памяти «память слов» содержал аудиозаписи фрагментов речевых сообщений;
блок управления может содержать программируемый микроконтроллер, рассчитывающий фазовую задержку, соответствующую максимальному значению Uэфф на основании полученного номера положения коммутатора, а затем - угол отклонения исходя из полученной величины задержки.
В способе определения водолазом направления на источник тонального звукового сигнала (ИТЗС), основанном на приеме сигнала ИТЗС двумя ненаправленными антеннами, разнесенными в пространстве на расстояние, равное четверти длины волны несущей частоты принимаемого сигнала, причем сигнал с выхода второй антенны задерживают на время τ, суммирую с сигналом первой антенны, при этом для принятия решения о направлении на источник ИТЗС изменяют пространственное положение условной линии, соединяющей центры антенн изменением положения водолаза в пространстве, введены следующие новые признаки:
запускают процедуру определения водолазом направления на ИТЗС включением устройства при помощи нажатия тумблера запуска;
формируют сигнал запуска генерирования двух наборов синхроимпульсов, первый набор синхроимпульсов является управляющим переключением в коммутаторе отводов блока задержки на заданную длительность, и количество синхроимпульсов этого набора соответствует количеству отводов устройства задержки, а с помощью второго набора синхроимпульсов синхронизируют работу блоков памяти, период следования синхроимпульсов этого набора должен быть кратным периоду синхроимпульсов первого набора;
после включения устройства водолаз сохраняет пространственное положение линии, соединяющей центры антенн, до тех пор пока он не получит голосовое сообщение;
на каждой реализации сигнала, соответствующей положению коммутатора и конкретному значению задержки, выполняют перевод суммарного сигнала из аналоговой в цифровую форму, осреднение сигнала и от результирующего сигнала берут обратное значение;
выполняют запоминание полученных сигналов, выбирают из них наибольший, одновременно фиксируя соответствующий ему номер положения коммутатора, на основании этого номера рассчитывают соответствующую ему фазовую задержку и далее на основе полученной задержки вычисляют угол отклонения;
формируют голосовое сообщение типа «Отклонение N градусов», где N - рассчитанный устройством угол между линией, соединяющей центры антенн, и линией, соединяющей первую антенну и ИТЗС;
далее водолаз изменяет пространственное положение линии, соединяющей центры антенн, и снова запускает устройство;
водолаз продолжает работу в выбранной плоскости до тех пор, пока по речевому сообщению отклонение станет минимальным;
аналогичным образом проводится поиск в ортогональной плоскости до получения сообщения «отклонение 0 градусов».
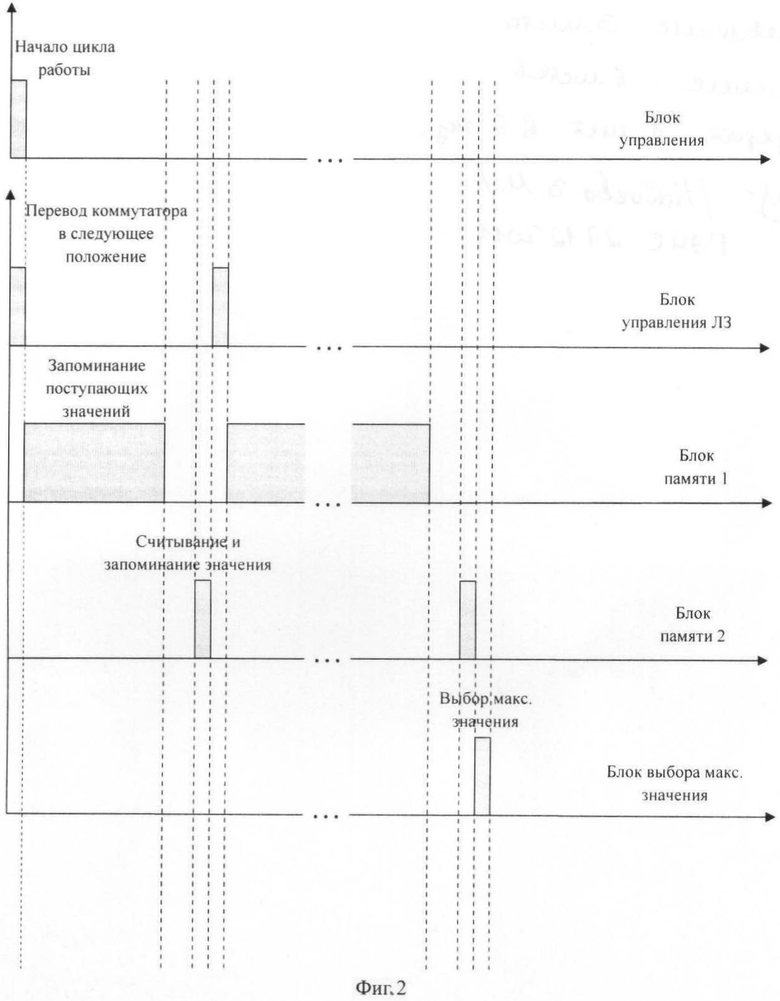
Сущность изобретения поясняется фиг.1-2, где на фиг.1 представлена обобщенная функциональная схема заявляемого устройства; на фиг.2 показаны генерируемые синхроимпульсы.
Предлагаемое устройство (фиг.1) состоит из ненаправленных акустических антенн 1, 2, которые обозначены A1 и A2; антенны размещены на расстоянии λ/4. Конструктивно антенны выполнены в виде ненаправленных гидрофонов, они могут располагаться на шлеме водолаза выше поверхности шлема, чтобы уменьшить влияние дифракции. Выход антенны А2 соединен с блоком 3 задержки (БЗ), который выполнен с возможностью дискретной задержки сигнала на время τ=Т/4÷3Т/4, где Т - период несущей частоты принимаемого сигнала, причем количество дискрет определяется заданной точностью пеленгования. Блок задержки соединен с сумматором с помощью коммутатора 4, который обеспечивает выбор необходимой дискретной задержки. Сумматор 5 имеет два входа, первый вход соединен с антенной A1, а второй вход соединен с коммутатором 4. Выход сумматора соединен с аналого-цифровым преобразователем (АЦП) 6, который соединен с первым блоком 7 памяти. Выход блока 7 подключен к входу блока 8 определения Uэфф. Блок 8, блок 9 вычисления 1/Uэфф, второй блок памяти 10, блок 11 выбора максимального значения, блок 12 управления, блок 14 памяти «Память слов», цифроаналоговый преобразователь 15 и головной телефон 16 последовательно соединены между собой. Второй выход блока 12 соединен с блоком 17 синхронизации.
Блок 17 синхронизации подключен к блоку 18 управления БЗ, первому блоку 7 памяти, второму блоку 10 памяти и блоку 11 выбора максимального значения. Блок управления БЗ подсоединен к коммутатору 4. Кроме того, выход антенны A1 соединен с блоком 19 обнаружению сигнала, который, в свою очередь, подсоединен к головному телефону 16.
Работу устройства и действия по заявляемому способу целесообразно рассматривать совместно.
Включение заявляемого устройства производится нажатием тумблера 13 запуска. После включения устройства водолаз должен сохранять свое пространственное положение до получения речевого сообщения. При включении происходит включение блока 12 управления, который, в свою очередь, включает блок 17 синхронизации. Блок 17 синхронизации начинает генерировать синхроимпульсы (фиг.2). Первый набор синхроимпульсов поступает на блок 18 управления БЗ. При поступлении синхроимпульса блок 18 управления БЗ последовательно циклически переключает коммутатор 4, что приводит к последовательному изменению времени задержки блока 3 задержки от Т/4 до 3Т/4, где Т - период несущей частоты пеленгуемого сигнала, причем количество дискрет задержки зависит от количества отводов коммутатора 4 и БЗ 3. Второй набор синхроимпульсов поступает в первый блок 7 памяти, этот набор представляет собой набор длительных импульсов и служит для указания временных промежутков, во время которых происходит запись сигнала в память. Третий набор синхроимпульсов служит для включения второго блока 10 памяти на запись. Четвертый синхроимпульс поступает в блок 11 выбора максимального значения один раз за цикл работы.
Пусть сигнал источника звука, имеющий несущую частоту f, приходит на антенны. Идентичные антенны A1 и А2 являются ненаправленными (экранирование телом водолаза в данном случае не учитывается), поэтому сигнал, приходящий с любого направления, будет восприниматься водолазом. Для улучшения формирования ХН гидрофоны, из которых состоят антенны, могут быть приподняты над шлемом водолаза. Расстояние между антеннами равняется λ/4, поэтому сдвиг по фазе между сигналами, приходящими на антенны A1,2, будет вычисляться как:

где c - скорость звука в воде; d - расстояние, равное λ/4; α - угол между линией, соединяющей центры антенн, и направлением на источник звукового сигнала.
Сигнал с антенны А2 поступает в блок 3 задержки, а далее в коммутатор 4. В зависимости от подключенного отвода к коммутатору 4 сигнал задерживается на время от Т/4 до 3Т/4, где Т - период несущей частоты звукового сигнала. Количество дискрет задержки выбирается исходя из необходимой точности пеленгования. Таким образом, в блоке 3 задержки сигнал приобретает задержку

где φ=[0÷π].
Далее сигнал с выхода коммутатора 4 и сигнал с антенны A1 поступают на входы сумматора 5. Разность фаз между сигналами составляет

где φ=[0÷π].
Сигнал с сумматора 5 поступает на АЦП 6 и далее в первый блок 7 памяти, где происходит запоминание мгновенных значений суммарного сигнала. Далее сигнал поступает в блок 8 определения Uэфф. Таким образом, уменьшается влияние мгновенной помехи за счет работы с усредненными значениями.
Сигнал с выхода блока 8 определения Uэфф поступает в блок 9 вычисления 1/Uэфф и далее во второй блок 10 памяти. Второй блок 10 памяти управляется синхросигналом таким образом, чтобы в него записывалось одно значение 1/Uэфф для каждого положения коммутатора 4. После того как были последовательно включены все возможные положения коммутатора 4, на блок 11 выбора максимального значения поступает синхросигнал.
Переключения коммутатора 4 изменяют величину φ в диапазоне от 0 до π. Таким образом, для любого угла прихода сигнала α существует такое значение φ в выбранном диапазоне, что разность фаз между сигналами, приходящими на сумматор, Δφ будет равна π. То есть сигналы поступят на сумматор 5 в противофазе, и следовательно суммарный сигнал будет равен нулю и значение 1/Uэфф будет максимальным. Таким образом, после срабатывания блока 11 выбора максимального значения в блок 12 управления поступает номер положения коммутатора 4, которому соответствует φ, при котором Δφ=π. В соответствии с номером положения коммутатора 4 блок 12 управления определяет введенную фазовую задержку φ.
Зависимость угла между линией, соединяющей центры антенн, и направлением на источник звукового сигнала и введенной фазовой задержкой φ определяется как

Блок 12 управления рассчитывает угол α.
Речевой интерфейс водолаза работает следующим образом: в соответствии с полученным значением из блока 14 памяти «Память слов», содержащего аудиозаписи фрагментов речевого сообщения, считываются необходимые фрагменты и из них формируется сообщение вида «Отклонение α градусов». Сформированное сообщение поступает на ЦАП 15 и далее в головной телефон 16 водолаза. После этого блок 12 отключается.
В результате единичного срабатывания устройства водолаз получает информацию об угле отклонения от направления на источник звукового сигнала в речевом виде. Далее водолаз изменяет пространственное положение линии, соединяющей центры антенн, и снова запускает устройство включением тумблера 13 запуска. Водолаз продолжает работу в выбранной плоскости до тех пор, пока по речевому сообщению отклонение не станет минимальным. После этого аналогичным образом проводится поиск в ортогональной плоскости до получения сообщения «отклонение 0 градусов».
Блок 19 обнаружения сигнала позволяет работать данной системе в режиме гидроакустического телефона.
Расчеты показывают, что в условиях реальной помехи точность определения направления на источник сигнала составляет 5÷10°.
Таким образом, достигается заявленный технический эффект, заключающийся в однозначном пеленговании источника тонального звукового сигнала, приходящего с любого направления, с приемлемой для водолазных работ точностью и с практической возможностью реализации при комплектации водолазного снаряжения.
Изобретение может быть использовано при подводно-технических, аварийно-спасательных, исследовательских работах, по военной тематике, а также для «приведения» водолаза на судно-обеспечитель или на другой объект для взаимного ориентирования при работе в группе в условиях плохой видимости, подо льдом.
Источники информации
1. Занин В.Ю., Малюзенко Н.Н., Чебыкин О.В. Снаряжение подводного пловца. СПб: изд-во «Макет», 1997.
2. Патент США №2002109601. Scuba diver communication and tracking device (Шлемофонная система связи водолаза и устройство для навигации). МПК G08В 13/14. Публ. 15.08.2002.
3. Патент США №6272073. Underwater location and communication device (Прибор для подводной связи и ориентации). МПК Н04В 11/00. Публ. 07.08.2001.
4. Свидетельство РФ на полезную модель №43370. Пеленгатор водолаза. МПК G01S 3/80. Публ. 16.01.2005.
5. Заявка №2010106521. Устройство и способ определения водолазом направления на источник звукового сигнала. МПК8 G01S 3/80, В63С 11/26, Н04В 11/00. Приоритет 24.02.2010 (ПРОТОТИП).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ ОПРЕДЕЛЕНИЯ ВОДОЛАЗОМ НАПРАВЛЕНИЯ НА ИСТОЧНИК ЗВУКОВОГО СИГНАЛА | 2010 |
|
RU2439602C2 |
| ПЕЛЕНГАТОР ВОДОЛАЗА | 2012 |
|
RU2494914C1 |
| Способ гидроакустической телефонной связи водолазов и устройство для его осуществления (варианты) | 2017 |
|
RU2658477C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2201599C1 |
| Способ обнаружения и оценивания характеристик широкополосных сигналов и устройство для его реализации | 2023 |
|
RU2814220C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2263327C1 |
| РАДИОЛОКАЦИОННЫЙ ПРИБОР ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ДЛЯ СЛАБОВИДЯЩИХ И СЛЕПЫХ ЛЮДЕЙ | 2018 |
|
RU2679924C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2341811C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2383897C1 |
| СПОСОБ ПЕЛЕНГАЦИИ РАДИОСИГНАЛОВ И ПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2419805C1 |
Использование: для определения водолазом направления на источник тонального звукового сигнала. Сущность: сигнал источника принимается на две ненаправленные антенны, расстояние между которыми λ/4. Сигнал от первой антенны подается на вход сумматора, сигнал от второй антенны последовательно задерживается на время от Т/4 до 3Т/4, затем подается на второй вход сумматора. В результате суммирования сигналов при разных положениях коммутатора получается набор среднеквадратичных значений суммарного сигнала, далее рассчитываются обратные значения и из них выбирается максимальное. Определяется номер положения коммутатора, соответствующий максимальному значению обратного сигнала, и на основе полученного номера определяется введенная задержка. После этого на основании введенной задержки рассчитывается угол между направлением прихода сигнала и линией, соединяющей центры антенн. Полученный угол переводится в речевой вид и сообщается водолазу по головному телефону. Водолаз проводит поиск направления, при котором величина угла отклонения становится минимальной, в какой-либо плоскости, далее он начинает работу в плоскости, ортогональной выбранной, до получения речевого сообщения «отклонение 0 градусов». Технический результат: обеспечение пеленгования сигнала в любом направлении, уменьшение влияния помехи на точность пеленгования, предоставление водолазу информации в форме человеческой речи, в частности о численном значении угла отклонения. 2 н. и 2 з.п. ф-лы, 2 ил.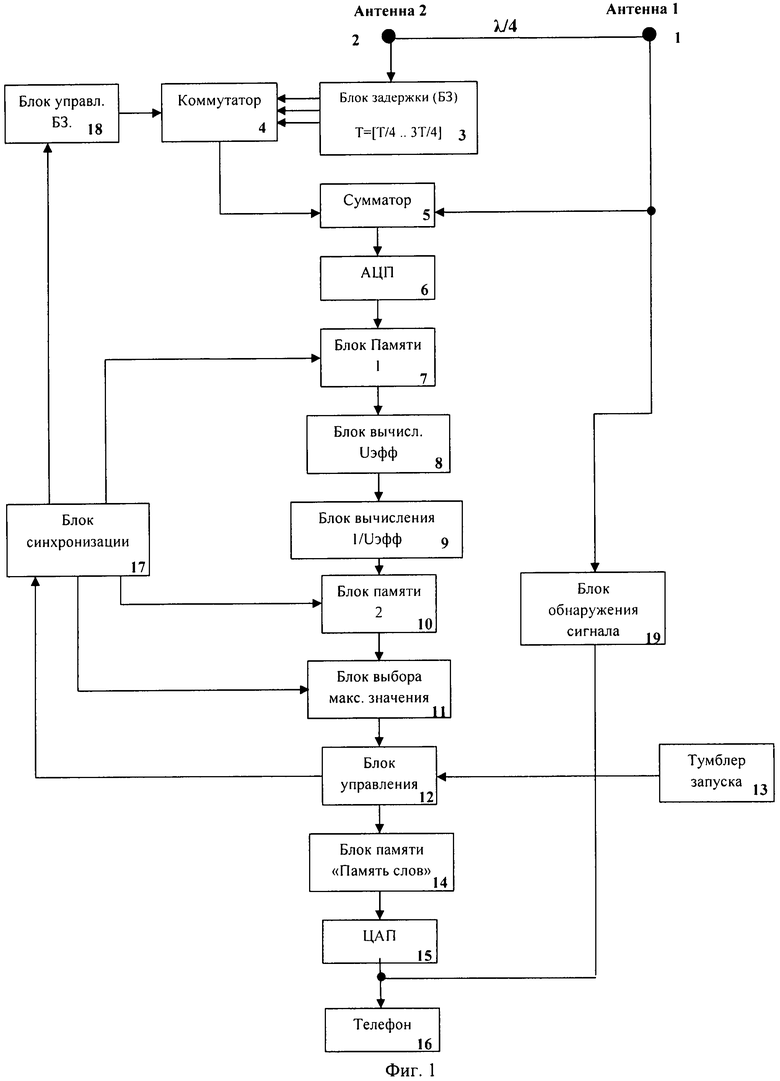
1. Устройство определения водолазом направления на источник тонального звукового сигнала, содержащее две ненаправленные антенны, центры которых размещены на расстоянии четверти длины волны несущей частоты принимаемого сигнала, блок задержки, сумматор и головной телефон, при этом выход первой антенны соединен с первым входом сумматора, выход второй антенны соединен с входом блока задержки, отличающееся тем, что блок задержки выполнен с возможностью дискретной задержки сигнала на время τ=Т/4÷3Т/4, где Т - период несущей частоты принимаемого сигнала, причем количество дискрет определяется заданной точностью пеленгования; дополнительно введены коммутатор, блок управления блоком задержки, блок синхронизации, блок обнаружения сигнала, тумблер запуска, а также последовательно соединенные аналого-цифровой преобразователь (АЦП), первый блок памяти, блок вычисления Uэфф, блок вычисления 1/Uэфф, второй блок памяти, блок выбора максимального значения, блок управления, блок памяти «память слов» и цифроаналоговый преобразователь (ЦАП), причем выход первой антенны соединен с входом блока обнаружения сигнала, выход которого соединен с входом головного телефона; выход блока задержки соединен с сигнальным входом коммутатора, а его выход - со вторым входом сумматора, выход сумматора соединен с входом АЦП; тумблер запуска соединен со вторым входом блока управления, второй выход которого соединен со входом блока синхронизации, первый выход которого соединен с блоком управления блока задержки, второй выход - со вторым входом первого блока памяти, третий выход - со вторым входом второго блока памяти, а четвертый выход - со вторым входом блока выбора максимального значения, при этом выход блока управления блоком задержки соединен с входом управления коммутатора, выход ЦАП соединен с входом телефона.
2. Устройство по п.1, отличающееся тем, что блок памяти «память слов» содержит аудиозаписи фрагментов речевых сообщений, из которых формируется необходимое речевое сообщение.
3. Устройство по п.1, отличающееся тем, что блок управления содержит программируемый микроконтроллер, рассчитывающий фазовую задержку соответствующую максимальному значению Uэфф на основании полученного номера положения коммутатора, а затем - угол отклонения, исходя из полученной величины задержки.
4. Способ определения водолазом направления на источник тонального звукового сигнала (ИТЗС), основанный на приеме сигнала ИТЗС двумя ненаправленными антеннами, разнесенными в пространстве на расстояние, равное четверти длины волны несущей частоты принимаемого сигнала, и принятии решения о направлении на источник ИТЗС, причем сигнал с выхода второй антенны задерживают на время τ, суммируют с сигналом первой антенны, для принятия решения о направлении на источник ИТЗС изменяют пространственное положение условной линии, соединяющей центры антенн изменением положения водолаза в пространстве, отличающийся тем, что начинают определение направления на ИТЗС с запуска устройства определения водолазом направления на ИТЗС включением тумблера запуска, после чего формируют сигнал запуска генерирования двух наборов синхроимпульсов, первый набор синхроимпульсов является управляющим переключением в коммутаторе отводов блока задержки на заданную длительность и количество синхроимпульсов этого набора соответствует количеству отводов устройства задержки, а с помощью второго набора синхроимпульсов синхронизируют работу блоков памяти с обеспечением периода следования синхроимпульсов этого набора, кратным периоду синхроимпульсов первого набора; при этом сохраняют пространственное положение линии, соединяющей центры антенн, до тех пор, пока не получат голосовое сообщение, для получения которого на каждой реализации сигнала, соответствующей положению коммутатора и конкретному значению задержки, выполняют перевод суммарного сигнала из аналоговой в цифровою ферму, усредняют сигнал, и от результирующего сигнала берут обратное значение, выполняют запоминание полученных таким образом сигналов, выбирают из них наибольший, одновременно фиксируя соответствующий ему номер положения коммутатора, на основании этого номера рассчитывают соответствующую ему фазовую задержку, по которой вычисляют угол отклонения; после чего формируют голосовое сообщение типа «отклонение N градусов», где N - рассчитанный угол между линией, соединяющей центры антенн, и линией, соединяющей первую антенну и ИТЗС, после чего блок управления отключается, далее изменяют пространственное положение линии, соединяющей центры антенн, и снова включают тумблер запуска; продолжают работу в выбранной плоскости до тех пор, пока по речевому сообщению отклонение не станет минимальным; после этого проводят поиск в ортогональной плоскости до получения сообщения «отклонение 0 градусов».
| RU 2006137530 А, 27.04.2008 | |||
| Устройство для разъединения штанг с колонковой трубы | 1934 |
|
SU43370A1 |
| RU 2002111457 А, 10.11.2003 | |||
| US 5666326 А, 09.09.1997 | |||
| US 3944967 А, 16.03.1976. | |||

